
New Approaches to Exciting Exergame-Experiences for People with Motor Function Impairments


Abstract
:
1. Introduction
- -
- The amplification of slight movements, due to muscle weakness, to full movements
- -
- Distinguishing movements needed to control an avatar or a menu from the ones that comprise the exercise
- -
- Proper inclusion of wheelchair users
1.1. Related Work
- -
- …are limited to non-occluding movements [2] which restrict applications to a frontal view perspective. Other individuals can interfere negatively by walking into the camera’s view.
- -
- -
- -
- …generally lack interesting design and motivating stories. The authors of [7] published extensive results of their survey of volunteers. Some of them mentioned monotony due to repetitive exercises, the absence of variety and challenges, as well as some frustration when the game did not react as expected.
- -
- -
- …lack adaptability, e.g., in [7], the surveyed participants stated that the games were too difficult when they suffered greater impairments, and found them boring when they had high motor functionality. In [37], screens had to be adapted to the range the users could reach with their arms due to muscle weaknesses. Appropriate players are those with a wide range of possible arm movements (spreading), as resting arms near the body impede any true detection of the person [6,29].
- -
- …lack configurability and well-designed monitoring systems. The authors of [7] point out especially that it is very important to implement monitoring systems and the possibility to vary and graduate the intensity and duration of practice, in particular, in cases of very repetitive activities and when individuals ignore pain symptoms due to high levels of engagement and motivation.
1.2. Motivation for this Work
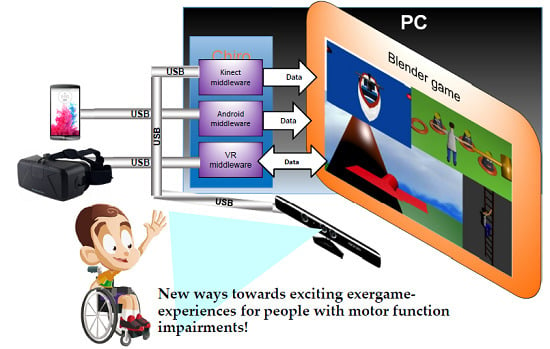
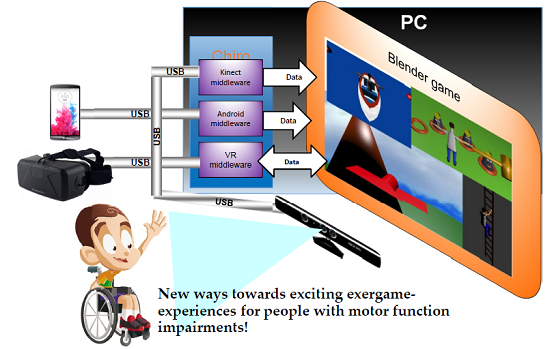
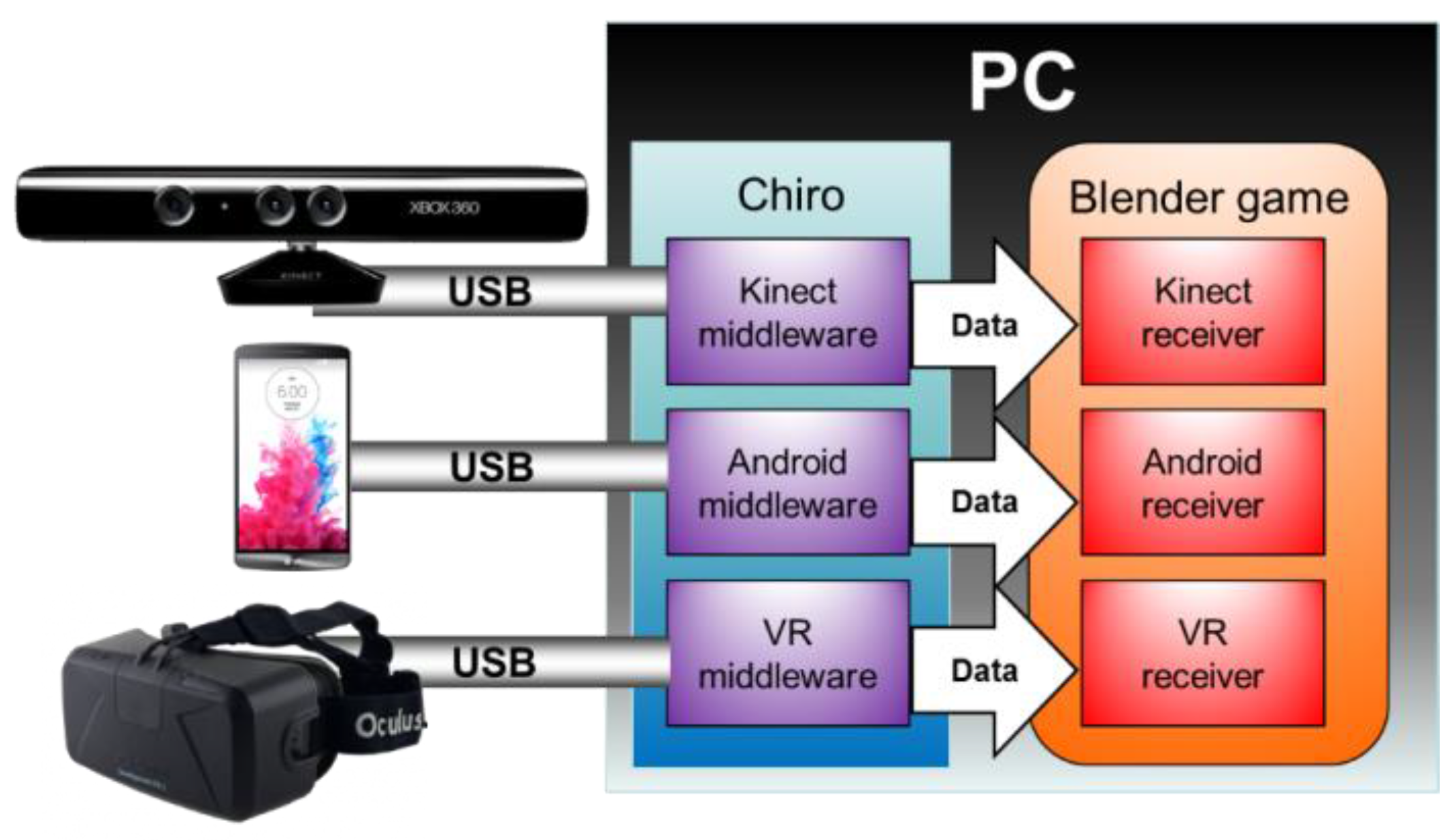
2. The Proposed Gaming Environment
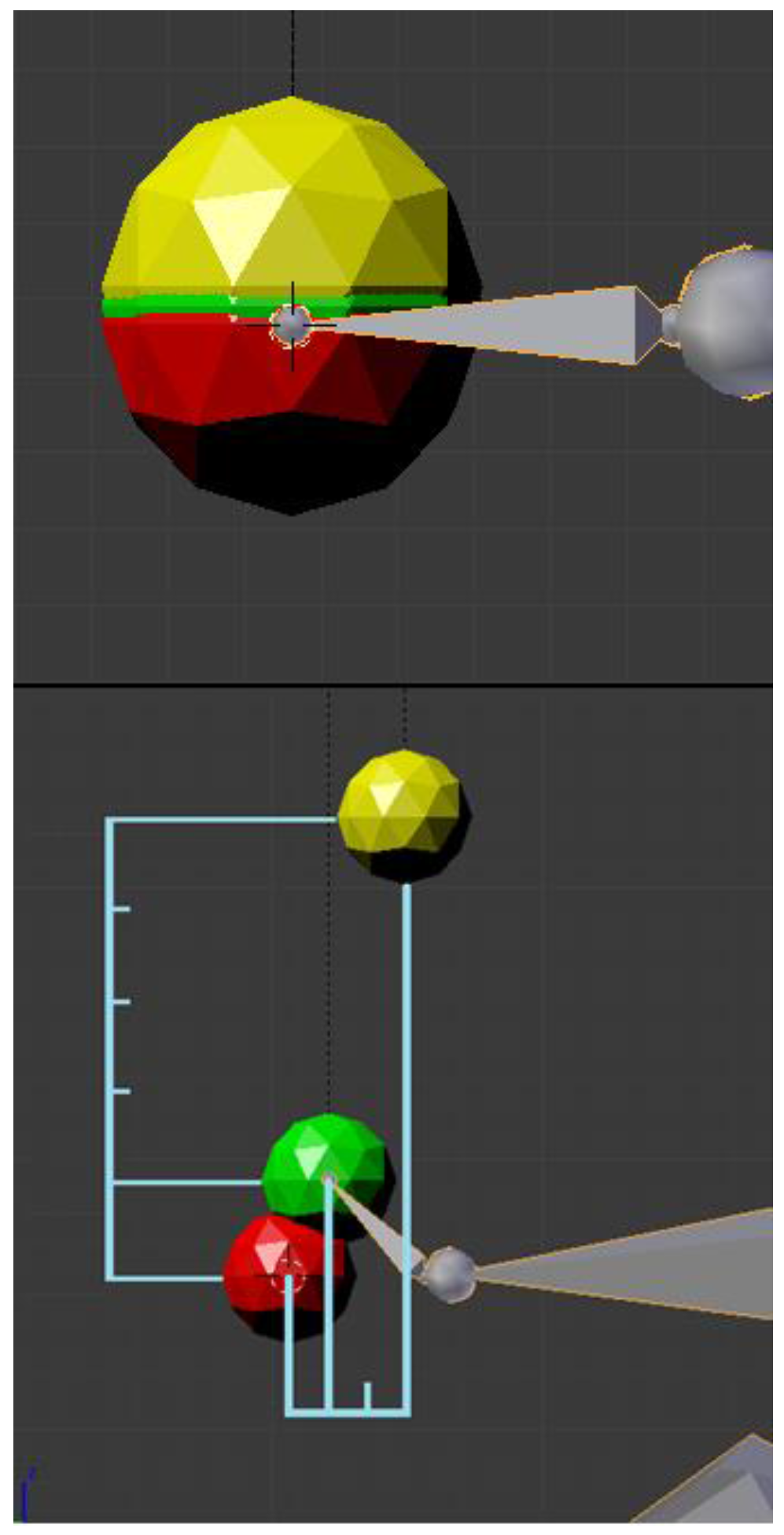
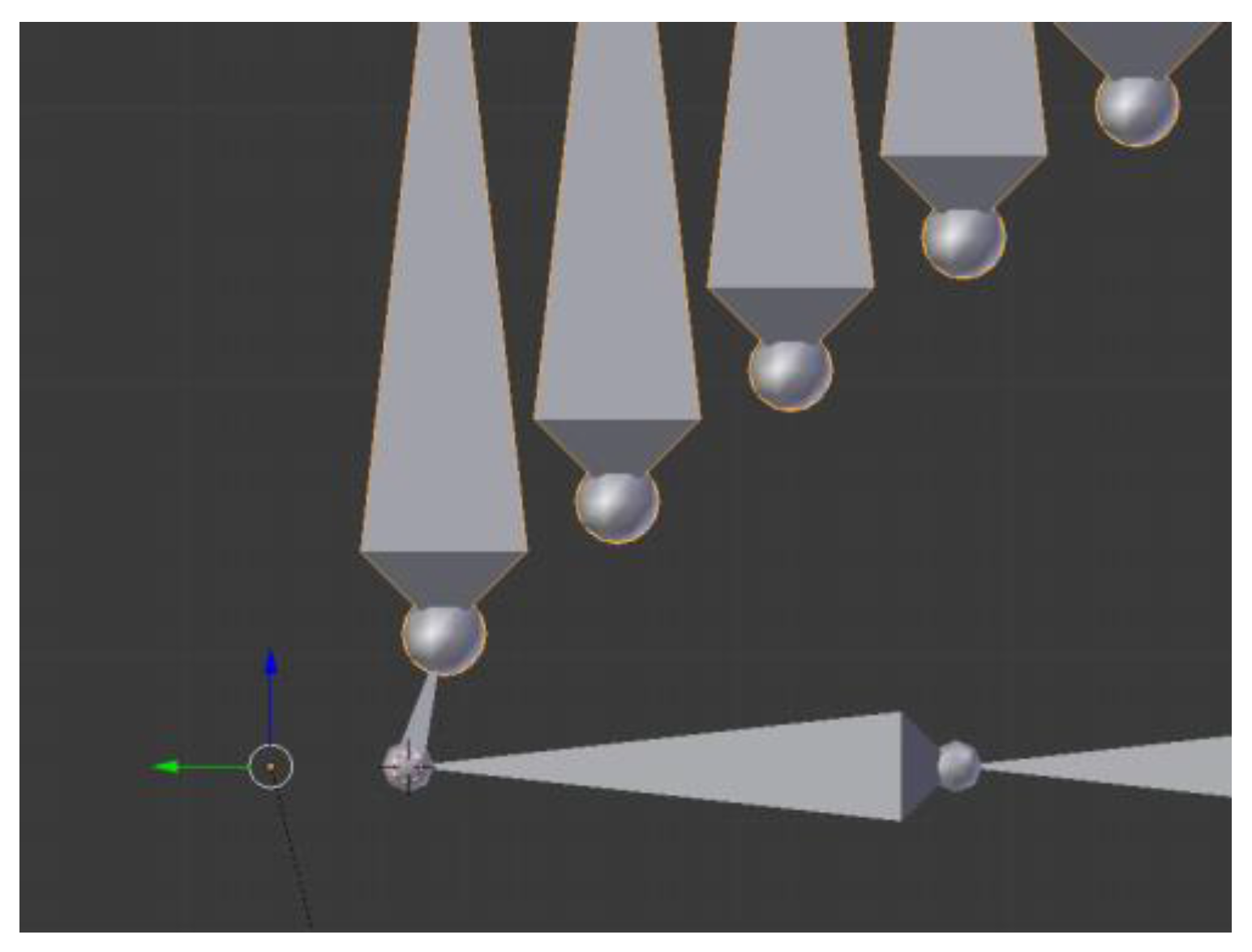
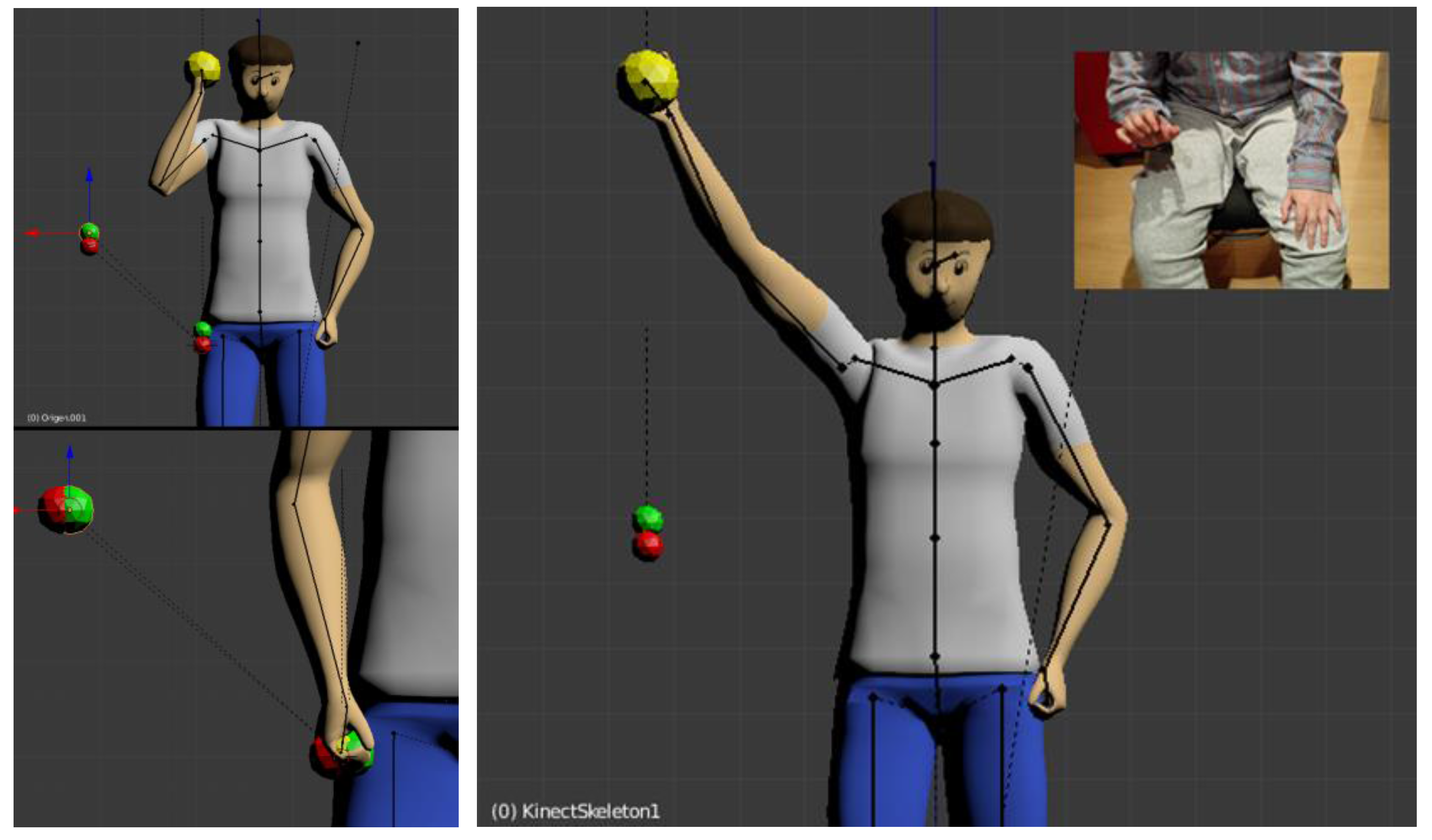
2.1. Technical Realization
Motion Amplification:
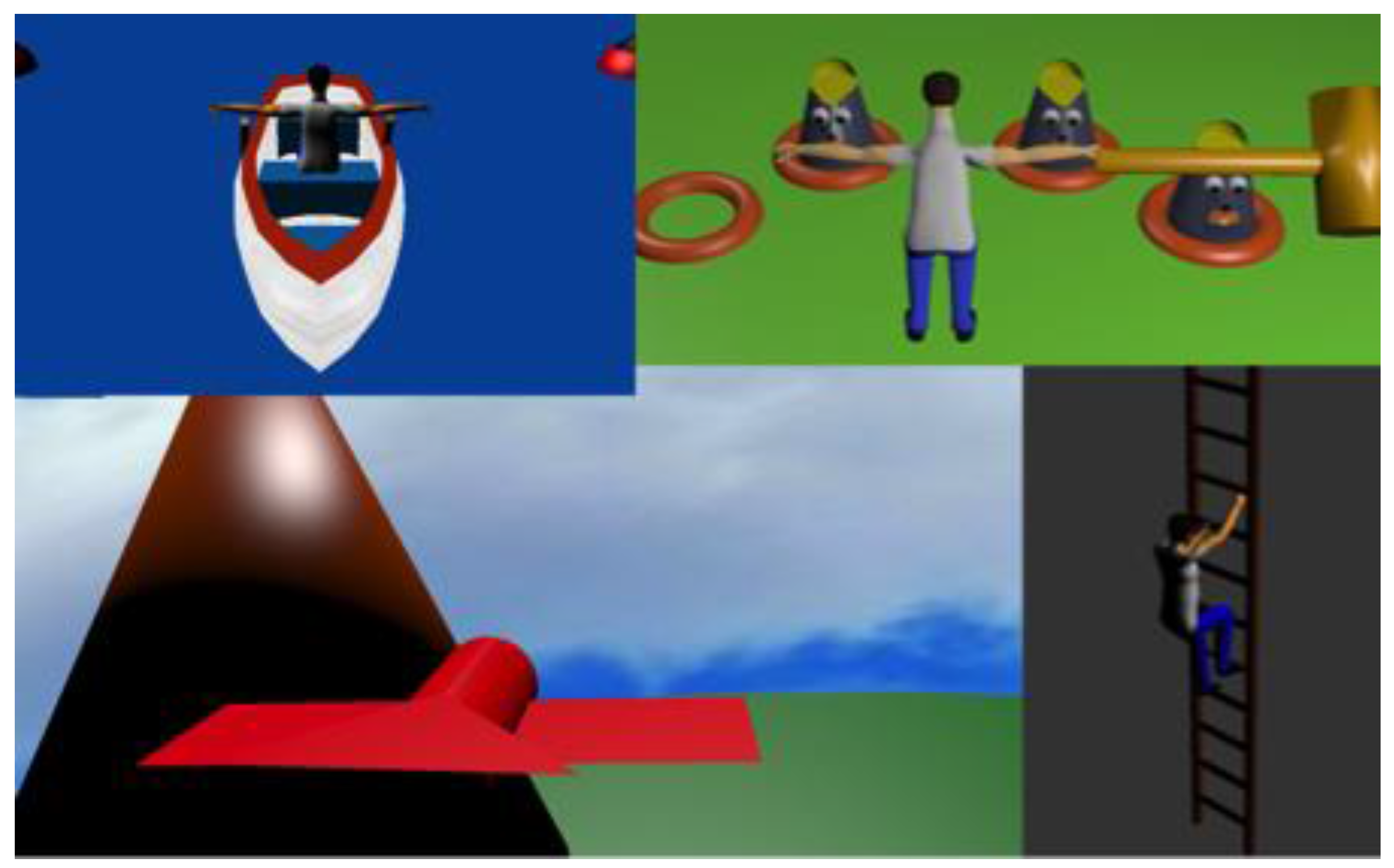
2.2. Preliminary Testing Environment
i. “The Ladder” (Climbing)
ii. “The Boat” (Rowing)
iii. “Whack-a-Mole” (Hitting)
iv. “The Paper-Bird” (Flying)
3. Tests and Results
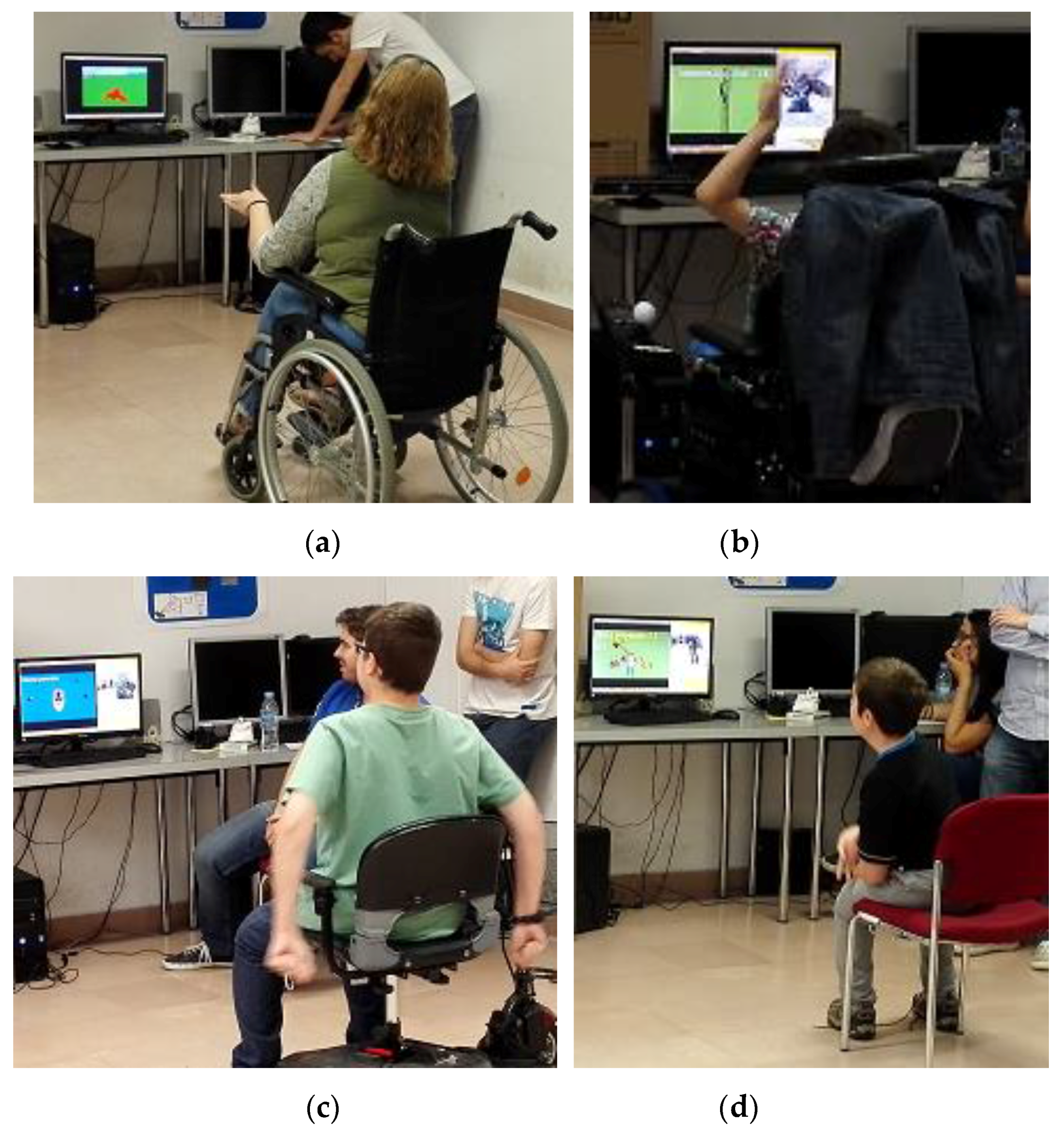
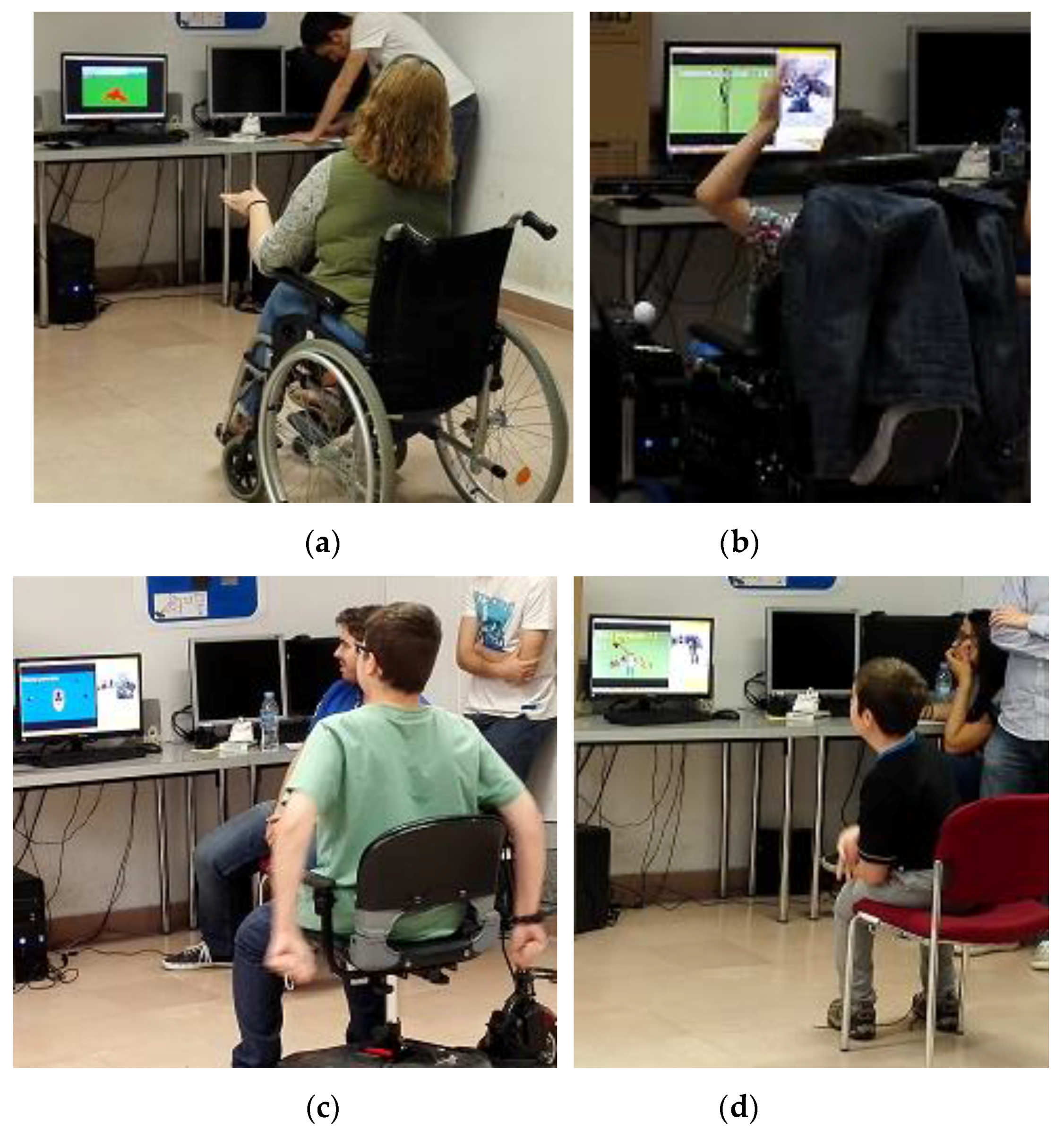
3.1. Testing Environment and Participants
- Learn about different types of physical restrictions and the corresponding needs for exercises, enduringness, as well as the existence of possible prohibited movements.
- Evaluate the interest of potential users in exergames by finding out their needs and wishes and observing their reactions.
- Check and verify the functionality of the control elements and amplifiers. Find deficiencies and problems to resolve.
3.2. Test Procedure
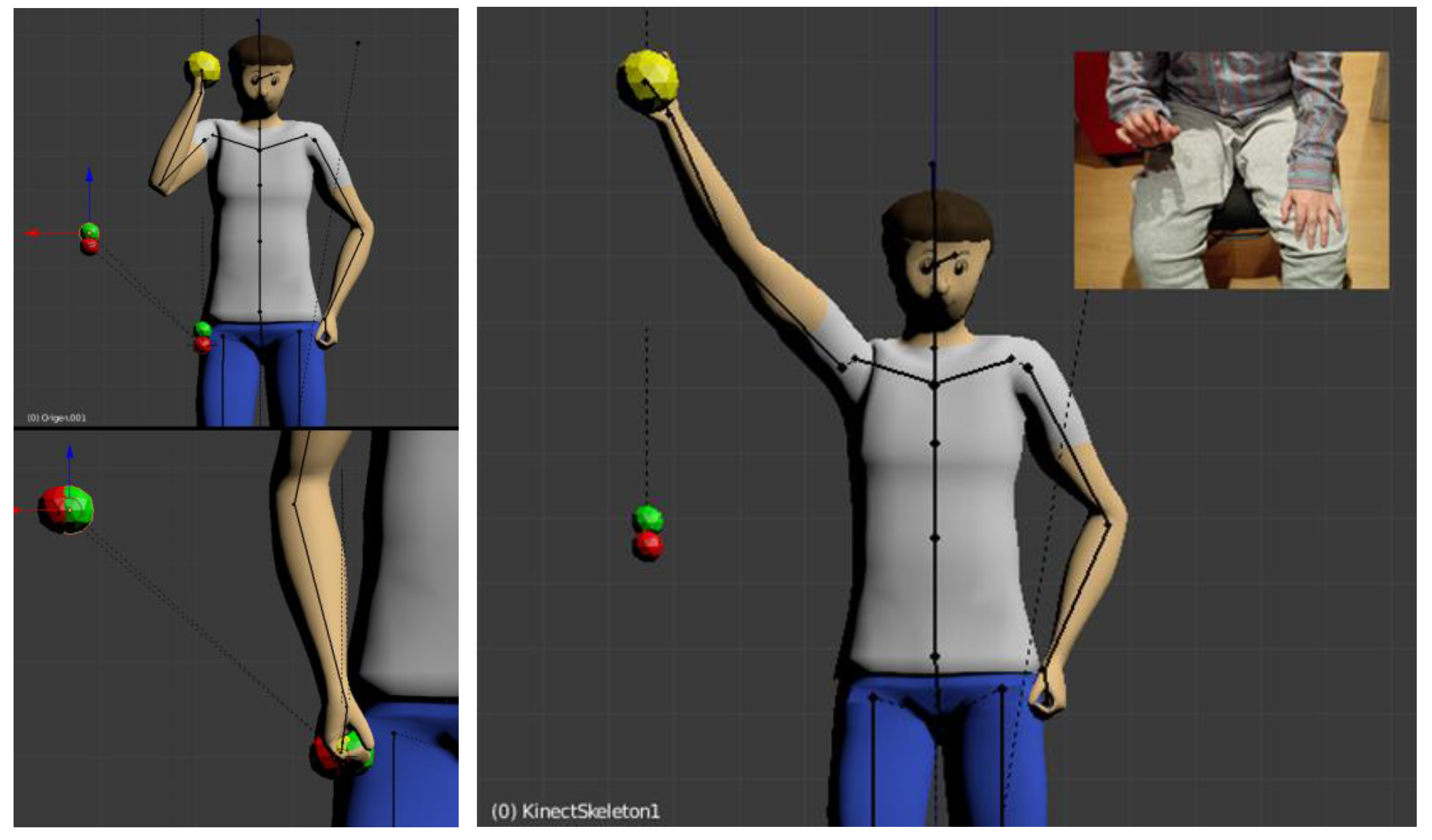
3.3. Calibration Results
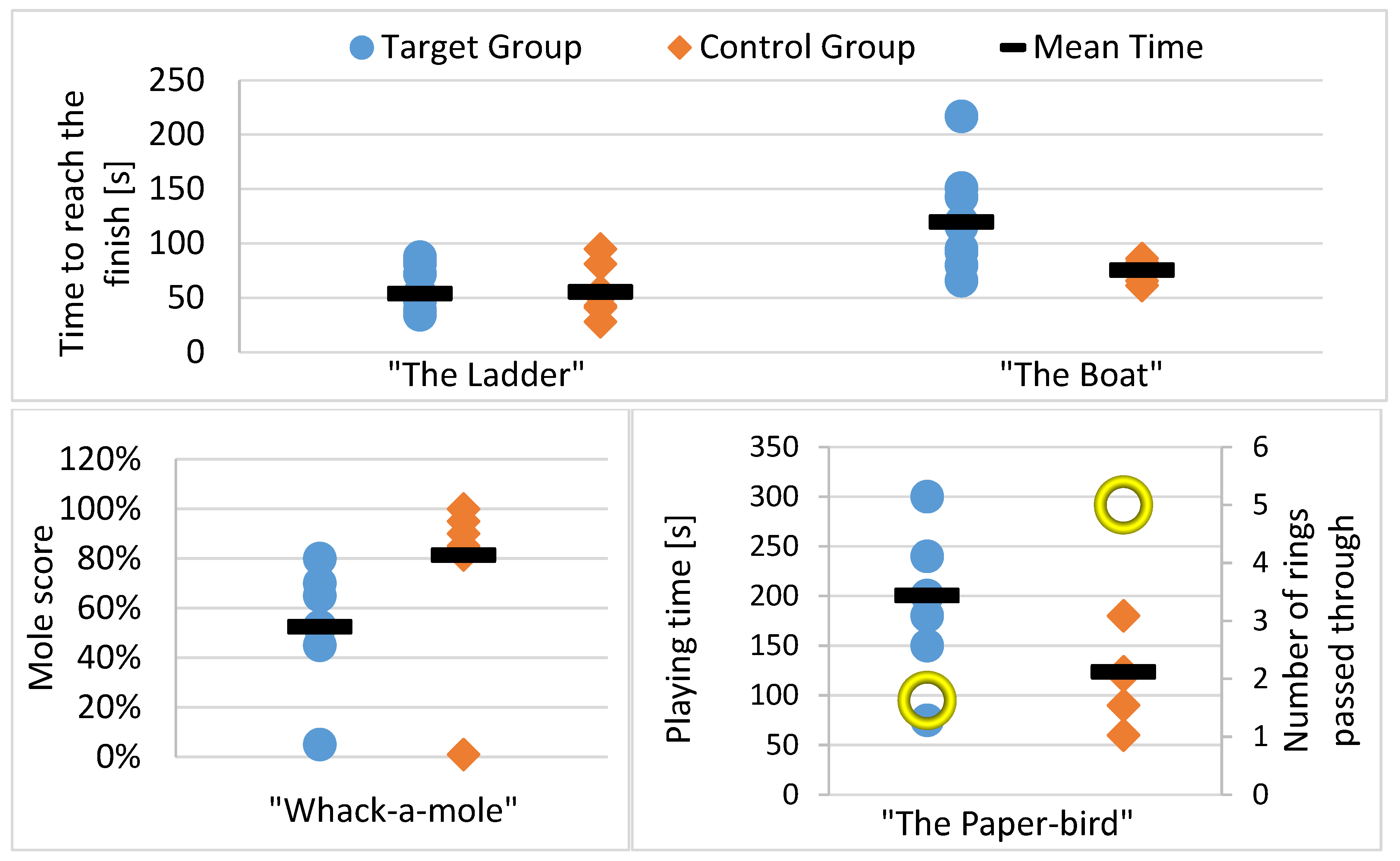
3.4. Blender Mini-Games
i. “The Ladder”
ii. “The Boat”
iii. “Whack-a-Mole”
iv. “The Paper-Bird”
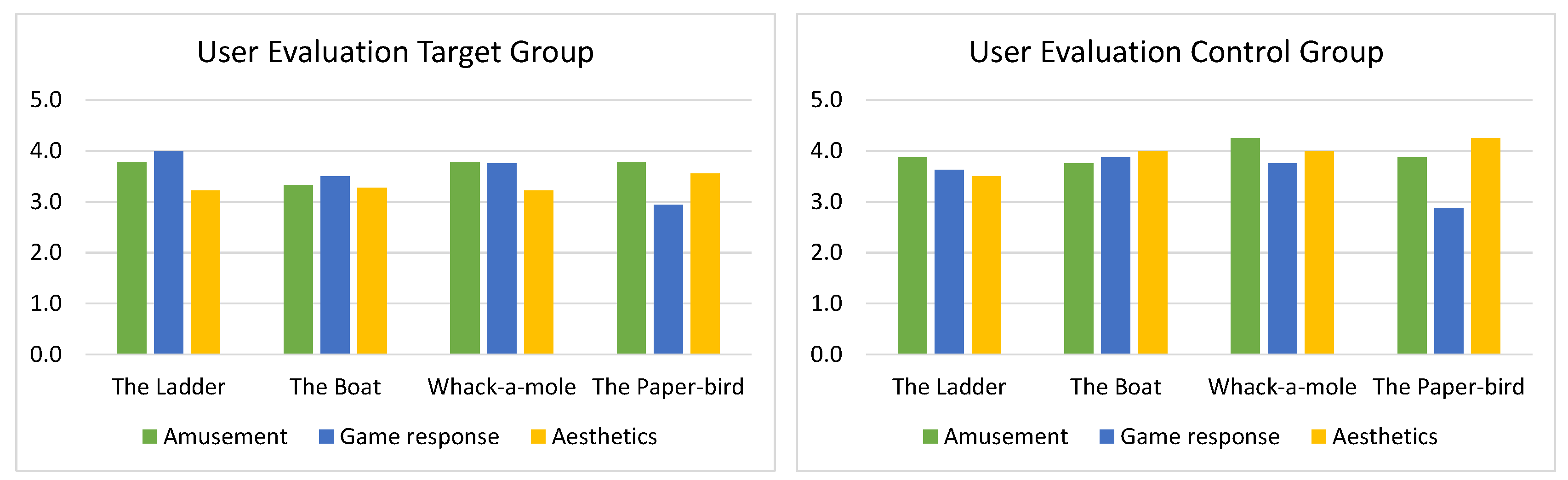
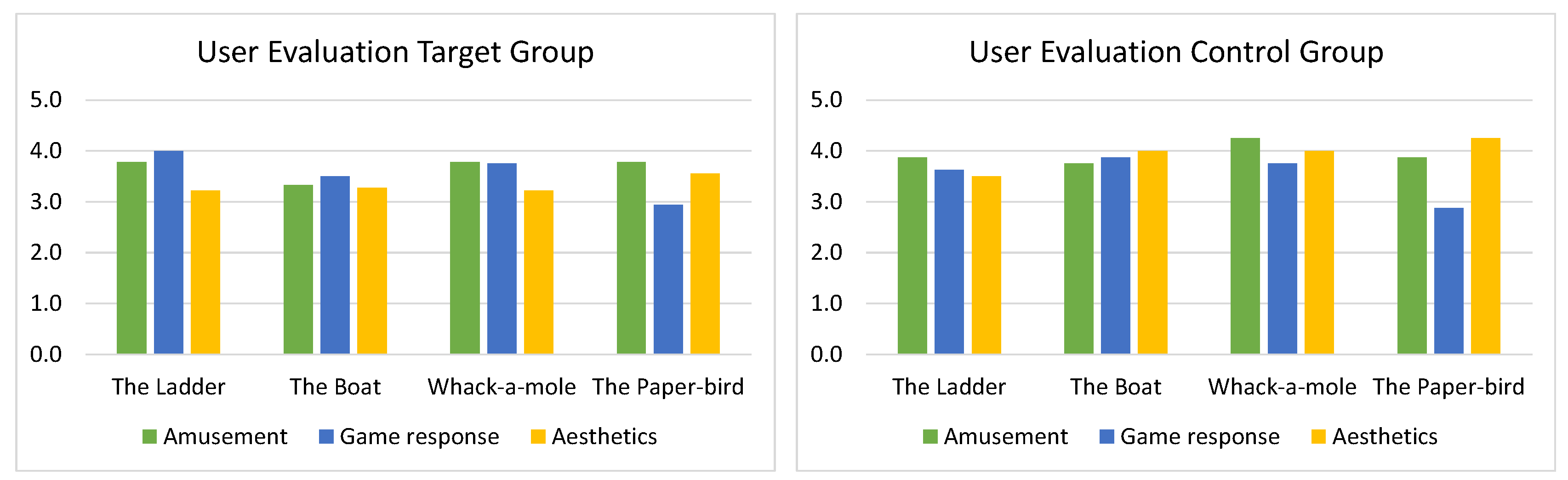
3.5. Results of the Survey
3.6. Discussion
4. Conclusions and Future Work
4.1. Conclusions
4.2. Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kitsunezaki, N.; Adachi, E.; Masuda, T.; Mizusawa, J.I. KINECT applications for the physical rehabilitation. Ieice Technical Rep. Image Eng. 2012, 112, 41–46. [Google Scholar]
- Webster, D.; Celik, O. Systematic review of Kinect applications in elderly care and stroke rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 108. [Google Scholar] [CrossRef] [PubMed]
- Pompeu, J.E.; Arduini, L.A.; Botelho, A.R.; Fonseca, M.B.F.; Pompeu, S.M.A.A.; Torriani-Pasin, C.; Deutsch, J.E. Feasibility, safety and outcomes of playing Kinect Adventures!TM for people with Parkinson’s disease: A pilot study. Physiotherapy 2014, 100, 162–168. [Google Scholar] [CrossRef] [PubMed]
- Ortiz-Gutiérrez, R.; Cano-de-la-Cuerda, R.; Galán-del-Río, F.; Alguacil-Diego, I.M.; Palacios-Ceña, D.; Miangolarra-Page, J.C. A telerehabilitation program improves postural control in multiple sclerosis patients: A spanish preliminary study. Int. J. Environ. Res. Public Health 2013, 10, 5697–5710. [Google Scholar] [CrossRef] [PubMed]
- Hondori, H.M.; Khademi, M. A Review on Technical and Clinical Impact of Microsoft Kinect on Physical Therapy and Rehabilitation. J. Med. Eng. 2014, 2014, 846514:1–846514:16. [Google Scholar]
- Anderson, K.R.; Woodbury, M.L.; Phillips, K.; Gauthier, L.V. Virtual reality video games to promote movement recovery in stroke rehabilitation: A guide for clinicians. Arch. Phys. Med. Rehabil. 2015, 96, 973–976. [Google Scholar] [CrossRef] [PubMed]
- Bower, K.J.; Louie, J.; Landesrocha, Y.; Seedy, P.; Gorelik, A.; Bernhardt, J. Clinical feasibility of interactive motion-controlled games for stroke rehabilitation. J. Neuroeng. Rehabil. 2015, 12, 63. [Google Scholar] [CrossRef] [PubMed]
- Madeira, R.N.; Costa, L.; Postolache, O. PhysioMate-Pervasive physical rehabilitation based on NUI and gamification. In Proceedings of the EPE 2014—International Conference Exposition Electrical Power Engineering, Iasi, Romania, 16–18 October 2014; pp. 612–616.
- De Urturi, Z.S.; Méndez Zorilla, A.; García Zapirain, B. JeWheels: Kinect based serious game aimed at wheelchair users. Lect. Notes Comput. Sci. 2012, 7657 LNCS, 391–398. [Google Scholar]
- Hicks, K.; Gerling, K. Exploring Casual Exergames With Kids Using Wheelchairs. Chi Play 2015, 2015, 541–546. [Google Scholar]
- Valdés, B.A.; Hilderman, C.G.E.; Hung, C.; Shirzad, N.; Van der Loos, M. Usability Testing of Gaming and Social Media Applications for Stroke and Cerebral Palsy Upper Limb Rehabilitation. Eng. Med. Biol. Soc. 2014, 2014, 3602–3605. [Google Scholar]
- Martins, T.; Carvalho, V.V.; Soares, F. A serious game for rehabilitation of neurological disabilities: Preliminary study. In Proceedings of the 2015 IEEE 4th Portuguese BioEngineering Meeting, Porto, Portugal, 26–28 Febuary 2015.
- Skjæret, N.; Nawaz, A.; Morat, T.; Schoene, D.; Lægdheim, J.; Vereijken, B. Exercise and rehabilitation delivered through exergames in older adults : An integrative review of technologies, safety and efficacy. Int. J. Med. Inform. 2016, 85, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Abdur Rahman, M.; Qamar, A.M.; Ahmed, M.A.; Ataur Rahman, M.; Basalamah, S. Multimedia interactive therapy environment for children having physical disabilities. In Proceedings of the 3rd ACM Conference International Conference Multimedia Retrieval (ICMR ’13), Dallas, TX, USA, 16–19 April 2013; pp. 313–314.
- Roy, A.K.; Soni, Y.; Dubey, S. Enhancing Effectiveness of Motor Rehabilitation Using Kinect Motion Sensing Technology. In Proceedings of the IEEE Global Humanitarian Technology Conference: South Asia Satellite (GHTC-SAS), Trivandrum, India, 23–24 August 2013; pp. 298–304.
- Huang, L.-L.; Chen, M.-H.; Wang, C.-H.; Lee, C.-F. Developing a Digital Game for Domestic Stroke Patients’ Upper Extremity Rehabilitation—Design and Usability Assessment. In Universal Access in Human-Computer Interaction. Access to Learning, Health and Well-Being - Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Antona, M., Stephanidis, C., Eds.; Springer International Publishing: Basel, Switzerland, 2015; Volume 9177, pp. 454–461. [Google Scholar]
- Papangelis, A.; Mouchakis, G.; Texas, A.B.; Kosmopoulos, D.; Karkaletsis, V.; Makedon, F. A game system for remote rehabilitation of cerebral palsy patients. In Proceedings of the 5th International Conference on Pervasive Technologies Related to Assistive Environments; ACM: New York, NY, USA, 2012; pp. 19:1–19:9. [Google Scholar]
- Gutiérrez, R.O.; Galán Del Río, F.; De La Cuerda, R.C.; Alguacil Diego, I.M.; González, R.A.; Page, J.C.M. A telerehabilitation program by virtual reality-video games improves balance and postural control in multiple sclerosis patients. NeuroRehabilitation 2013, 33, 545–554. [Google Scholar] [PubMed]
- Burke, J.W.; McNeill, M.D.J.; Charles, D.K.; Morrow, P.J.; Crosbie, J.H.; McDonough, S.M. Optimising engagement for stroke rehabilitation using serious games. Vis. Comput. 2009, 1–15. [Google Scholar] [CrossRef]
- Jaume-I-Capó, A.; Moyà-Alcover, B.; Varona, J. Design issues for vision-based motor-rehabilitation serious games. Stud. Comput. Intell. 2014, 536, 13–24. [Google Scholar]
- Borghese, P.N.A. REWIRE. Available online: https://sites.google.com/site/projectrewire/ (accessed on 29 September 2016).
- Pirovano, M.; Mainetti, R.; Baud-Bovy, G.; Lanzi, P.L.; Borghese, N.A. Self-adaptive games for rehabilitation at home. In Proceedings of the 2012 IEEE Conference Computational Intelligence Games, Granada, Spain, 11–14 September 2012; pp. 179–186.
- Borghese, N.A.; Mainetti, R.; Pirovano, M.; Lanzi, P.L. An intelligent game engine for the at-home rehabilitation of stroke patients. In Proceedings of the 2013 IEEE 2nd International Conference Serious Games Applications Health, Vilamoura, Portugal, 2–3 May 2013; pp. 1–8.
- Moy, S. Do Try This At Home: Microsoft Kinect Turns Physical Therapy Into a Game. Fisc. Times 2015. [Google Scholar]
- D’Ornellas, M.C.; Cargnin, D.J.; Prado, A.L.C. Thoroughly Approach to Upper Limb Rehabilitation Using Serious Games for Intensive Group Physical Therapy or Individual Biofeedback Training. Brazilian Symp. Comput. Games Digit. Entertain. 2014, 2014, 140–147. [Google Scholar]
- Galna, B.; Jackson, D.; Schofield, G.; McNaney, R.; Webster, M.; Barry, G.; Mhiripiri, D.; Balaam, M.; Olivier, P.; Rochester, L. Retraining function in people with Parkinson’s disease using the Microsoft kinect: game design and pilot testing. J. Neuroeng. Rehabil. 2014, 11, 60. [Google Scholar] [CrossRef] [PubMed]
- Pedraza-Hueso, M.; Martín-Calzón, S.; Díaz-Pernas, F.J.; Martínez-Zarzuela, M. Rehabilitation Using Kinect-based Games and Virtual Reality. Procedia Comput. Sci. 2015, 75, 161–168. [Google Scholar] [CrossRef]
- Estepa, A.; Piriz, S.S.; Albornoz, E.; Mart, C. Development of a Kinect-based exergaming system for motor rehabilitation in neurological disorders. J. Phys. Conf. Series 2016, 705, 12060. [Google Scholar] [CrossRef]
- Microsoft. Accessibility and Kinect for Xbox 360. Available online: http://support.xbox.com/en-GB/xbox-360/accessories/accessibility-kinect (accessed on 29 September 2016).
- Apparelyzed. Spinal Cord Injury and Cauda Equina Syndrome Support Forum. Available online: http://www.apparelyzed.com/forums/topic/25204-xbox-360-best-kinect-game-for-wheelchair-users-fable-the-journey/ (accessed on 29 September 2016).
- Eckert, M.; Gómez-Martinho, I.; Meneses, J.; Martinez Ortega, J.F. A Multi Functional Plug-in for Exergames. IEEE Int. Symp. Consum. Electron. 2015, 4–6. [Google Scholar]
- Eckert, M.; Gómez-Martinho, I.; Meneses, J.; Martinez Ortega, J.F.M. A modular middleware approach for exergaming. In Proceedings of the International Conference on Consumer Electronics, Berlin, Germany, 5–7 September 2016; pp. 172–176.
- Gerling, K.M.; Linehan, C.; Kirman, B.; Kalyn, M.R.; Evans, A.B.; Hicks, K.C. Creating wheelchair-controlled video games: Challenges and opportunities when involving young people with mobility impairments and game design experts. Int. J. Hum. Comput. Stud. 2015, 94, 64–73. [Google Scholar] [CrossRef]
- Chiang, I.T.; Tsai, J.C.; Chen, S.T. Using Xbox 360 kinect games on enhancing visual performance skills on institutionalized older adults with wheelchairs. In Proceedings of the 2012 4th IEEE International Conference Digital Game and Intelligent Toy Enhanced Learning (DIGITEL), Takamatsu, Japan, 27–30 March 2012; pp. 263–267.
- Seo, N.J.; Kumar, J.A.; Hur, M.S.P.; Crocher, V. Usability evaluation of low-cost virtual reality hand and arm rehabilitation games. J. Rehabil. Res. Dev. 2016, 53, 321. [Google Scholar] [CrossRef] [PubMed]
- Meleiro, P.; Rodrigues, R.; Jacob, J.; Marques, T. Natural User Interfaces in the Motor Development of Disabled Children. Procedia Technol. 2014, 13, 66–75. [Google Scholar] [CrossRef]
- Bossavit, B.; Pina, A. Designing educational tools, based on body interaction, for children with special needs who present different motor skills. In Proceedings of the 2014 International Conference Interactive Technologies Games, iTAG 2014, Nottingham, UK, 16–17 October 2014; pp. 63–70.
- Luna-Oliva, L.; Ortiz-Gutiérrez, R.M.; Cano-De La Cuerda, R.; Piédrola, R.M.; Alguacil-Diego, I.M.; Sánchez-Camarero, C.; Martínez Culebras, M.D.C. Kinect Xbox 360 as a therapeutic modality for children with cerebral palsy in a school environment: A preliminary study. NeuroRehabilitation 2013, 33, 513–521. [Google Scholar] [PubMed]
- Ruff, J.; Wang, T.L.; Quatman-Yates, C.C.; Phieffer, L.S.; Quatman, C.E. Commercially available gaming systems as clinical assessment tools to improve value in the orthopaedic setting: A systematic review. Injury 2015, 46, 178–183. [Google Scholar] [CrossRef] [PubMed]
- Chou, Y. Actionable Gamification. Beyond Points, Badges, and Leaderboards; Octalysis Media: Fremont, CA, USA, 2015. [Google Scholar]
- Bonnechere, B.; Jansen, B.; Omelina, L.; Jan, S.V. The use of commercial video games in rehabilitation: A systematic review. Int. J. Rehabil. Res. 2016, 39, 277–290. [Google Scholar] [CrossRef] [PubMed]
- Blender Foundation Blender.org. Available online: http://www.blender.org/ (accessed on 14 July 2016).
- Oculus. Oculus Rift V.R. Available online: https://www.oculus.com/ (accessed on 29 September 2016).
- Microsoft. Kinect for Windows SDK v1.8. Available online: https://www.microsoft.com/en-us/download/details.aspx?id=40278 (accessed on 13 July 2016).
- Wang, H.Y.; Ju, Y.H.; Chen, S.M.; Lo, S.K.; Jong, Y.J. Joint range of motion limitations in children and young adults with spinal muscular atrophy. Arch. Phys. Med. Rehabil. 2004, 85, 1689–1693. [Google Scholar] [CrossRef] [PubMed]
- Grootenhuis, M.A.; de Boone, J.; van der Kooi, A.J. Living with muscular dystrophy: Health related quality of life consequences for children and adults. Health Qual. Life Outcomes 2007, 5, 31. [Google Scholar] [CrossRef] [PubMed]
- ASEM—Asociación de Enfermedades Neuromusculares Madrid. Available online: http://www.asem-madrid.org (accessed on 29 September 2016).
- Fundación TAMBIEN. Available online: http://www.tambien.org (accessed on 29 September 2016).
- Eckert, M.; Lopez, M.; Lazaro, C.; Meneses, J.; Martínez Ortega, J.F. Mokey—A motion based keyboard interpreter. In Proceedings of the IEEE International Symposium on Consumer Electronics (ISCE-15), Madrid, Spain, 24–26 June 2015.
- Eckert, M.; Lopez, M.; Lazaro, C.; Meneses, J.; Ortega, J.F.M. MoKey—A versatile exergame creator for everyday usage. Assistive Technol. 2017. Under 2nd review. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject ID | Disease | Gender | Age | Wheelchair |
|---|---|---|---|---|
| 1 | SMA (Spinal Muscular Atrophy) type 2 | male | 5 | Yes |
| 2 | SMA (Spinal Muscular Atrophy) type 2 | male | 13 | Yes |
| 3 | CP (Cerebral Palsy) | male | 11 | Yes |
| 4 | CP (Cerebral Palsy) | male | 12 | Yes |
| 5 | Hypotonia | male | 12 | Yes |
| 6 | BMD (Becker Muscular Dystrophy) | male | 13 | No |
| 7 | DMD (Duchenne Muscular Dystrophy) | male | 15 | Yes |
| 8 | DMD (Duchenne Muscular Dystrophy) | male | 16 | Yes |
| 9 | FSH (Facioscapulohumeral Muscular Dystrophy) | female | 43 | Yes |
| 10 | FSH (Facioscapulohumeral Muscular Dystrophy) | female | 49 | No |
| 11 | PPS (Post-polio Syndrome) | female | 50 | No |
| Game | “The Ladder” | “The Boat” | “Whack-a-mole” | “The Paper-bird” | |
|---|---|---|---|---|---|
| Parameter | Average time [s] ± SD | Score ± SD | Av. flying time [s] ± SD | Av. n° rings passed | |
| Control group | 55.68 ± 21.96 | 75.64 ± 8.41 | 81% ± 31% | 123.75 ± 38.06 | 5 ± 3 |
| Target Group | 53.99 ± 22.44 | 119.83 ± 48.99 | 53% ± 22% | 200.63 ± 71.52 | 1.63 ± 1.8 |
| Difference | −3% | +59% | −35% | +62% | −67% |
| Levene test | 0.93* | 0.08 | 0.58* | 0.11* | 0.12* |
| Variances are: | Equal | Diff | Equal | Equal | Equal |
| p (t-test) | 0.88* | 0.02 | 0.06* | 0.02 | 0.02 |
| F-value | 0.02* | 6.32 | 4.10* | 6.30 | 6.52 |
| p (chi-sq) | 0.56* | 0.02 | 0.01 | 0.03 | 0.02 |
| Groups are: | Equal | Diff | Equal | Diff | Diff |
| Daily | Frequently | Occasionally | Never | |||
| Target Group | 18% | 55% | 18% | 9% | ||
| Control Group | 25% | 13% | 63% | 0% | ||
| Graphics | Ease to Move* | Action | Online Play | Challenges | High Scores | |
| Target Group | 4 | 5 | 4 | 4.3 | 3.8 | 4.5 |
| Control Group | 3.75 | 3 | 4.6 | 3.9 | 3 | 5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eckert, M.; Gómez-Martinho, I.; Meneses, J.; Martínez, J.-F. New Approaches to Exciting Exergame-Experiences for People with Motor Function Impairments. Sensors 2017, 17, 354. https://doi.org/10.3390/s17020354
Eckert M, Gómez-Martinho I, Meneses J, Martínez J-F. New Approaches to Exciting Exergame-Experiences for People with Motor Function Impairments. Sensors. 2017; 17(2):354. https://doi.org/10.3390/s17020354
Chicago/Turabian StyleEckert, Martina, Ignacio Gómez-Martinho, Juan Meneses, and José-Fernán Martínez. 2017. "New Approaches to Exciting Exergame-Experiences for People with Motor Function Impairments" Sensors 17, no. 2: 354. https://doi.org/10.3390/s17020354
APA StyleEckert, M., Gómez-Martinho, I., Meneses, J., & Martínez, J.-F. (2017). New Approaches to Exciting Exergame-Experiences for People with Motor Function Impairments. Sensors, 17(2), 354. https://doi.org/10.3390/s17020354