3.2. Experimental Results and Discussion
A comparison study between the state-of-the-art ZUPT-based methods and our method was carried out to evaluate the position estimation performance. In our experiments, three ZUPT-based methods were implemented, including Godha’s method [
16] which simply resets the velocity to zero during the stance phases; Yun’s method [
17] which applies a time-variant acceleration bias error to remove velocity drift; and Schepers’ method [
18,
19] which uses high pass filters to remove velocity drift. To make the comparison fairer, we also implemented the Leppakoski’s map based position estimation method [
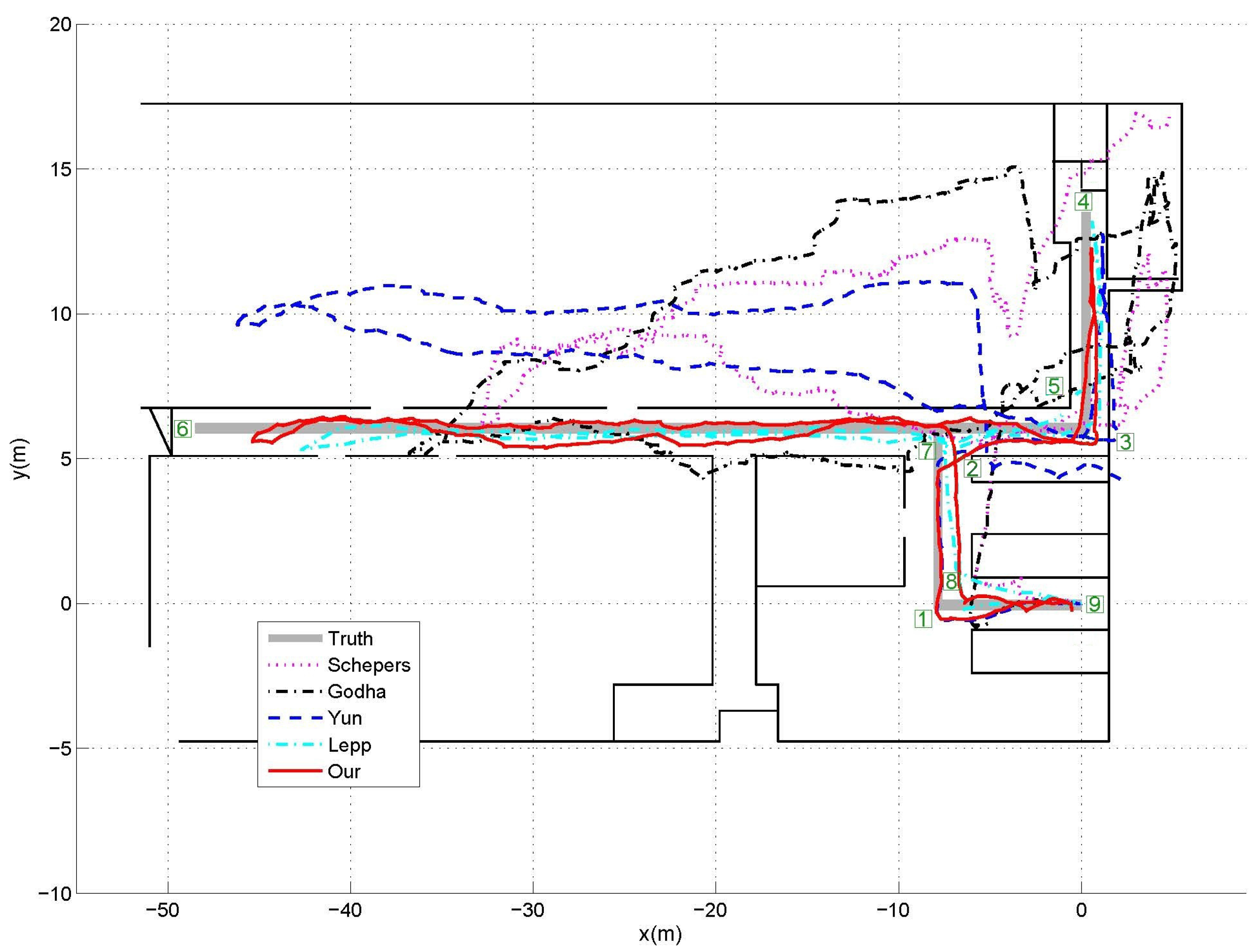
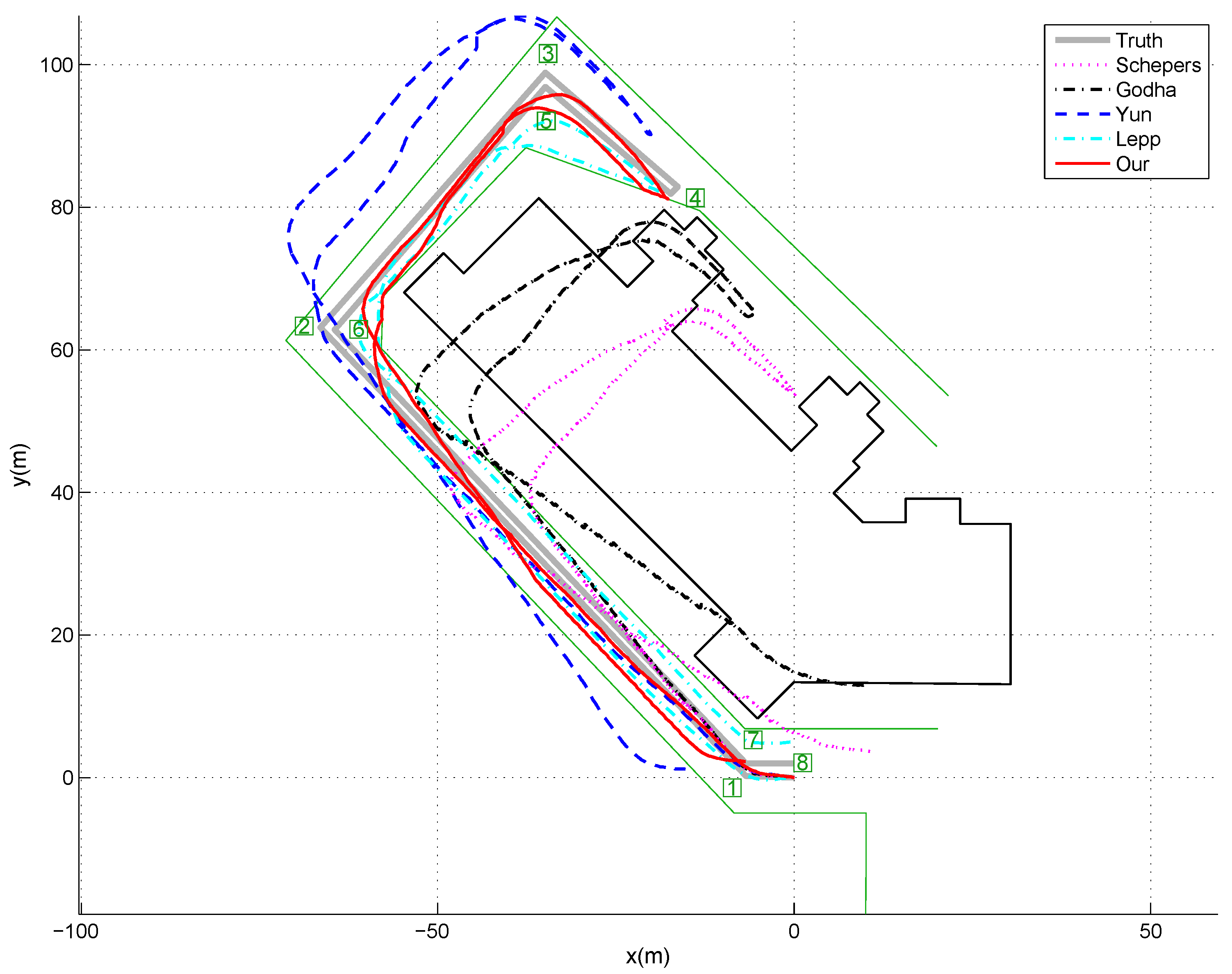
22]. In what follows, “Truth” represents the marked trajectory that the subjects need to follow, “Our” shows the tracking results of our method, “Lepp” indicates the performance of Leppakoski’s method, and “Godha”, “Yun” and “Schepers” stand for the corresponding ZUPT-based methods, respectively.
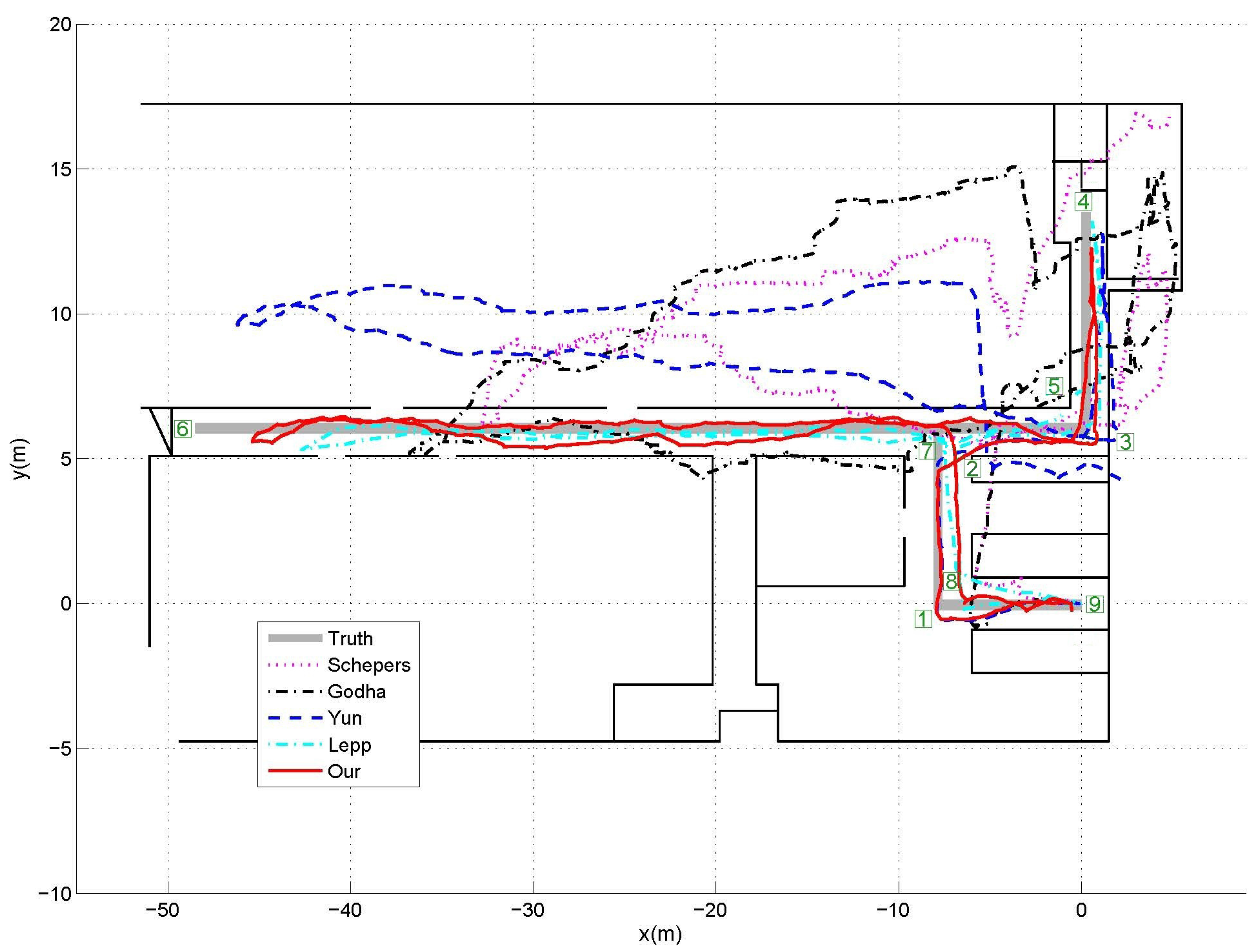
The indoor experiments were carried out in the laboratory corridors, as shown in
Figure 4, where the predefined walking path was indicated by the thick solid lines. From the starting point (0,0) in the plot, the subjects have to walk along the path, make several turns and then walk back to the starting position to close the loop.
Figure 4 also gives one example of position estimation result for the indoor corridor walking experiments. As can see from the figure, it is very clear that the proposed method can achieve the smallest position errors compared with the other three traditional ZUPT methods, which means that the integration of ZUPT and map information can improve the position estimation accuracy significantly. Meanwhile, the Lepp’s step counter plus map information based method can also achieve relatively good performance. This is mainly because the map information can improve the accuracy of walking direction estimation; however due to the difficulty of determining the step length precisely, there are also some errors in the walking trajectory estimations. We also noticed that Yun’s method outperformed the other two ZUPT methods. The reason is Godha’s method only simply reset the velocity to zero during the stance phases and the accumulated drift during the non-stance phases is included in the location estimation. Although Schepers’ method applied first-order recursive Butterworth high pass filters to remove the drift caused by the acceleration bias in the integrated velocity, the filters cannot remove the integration drift due to the difficulty of choosing the proper cutoff frequency. Yun’s method applied an acceleration bias variable not only to revise the integrated velocity during the non-stance phases, but also to set the velocity to zero during the stance phases, which can significantly improve the accuracy of position tracking over the other two ZUPT methods. On the other side, Yun’s method starts to drift away from the predefined path around the point (−9,6). However, the subject cannot enter into the other side of the corridor due to the existence of the wall. This priori map information was taken into consideration in our propose method; therefore, the estimate trajectory can be revised according to such information and thus position estimation accuracy can be improved significantly.
To further illustrate the strength of the proposed position estimation method, we also compared the estimation results derived from different methods with the predefined path quantitatively. In practice, it is common to assess the estimation accuracy via evaluating the positional difference between the starting and final points for the closed-loop walking patterns [
16,
17], but such evaluation may not be enough since it ignores the possible deviation of the other points from the walking path. Therefore, as indicated by the square number plates in
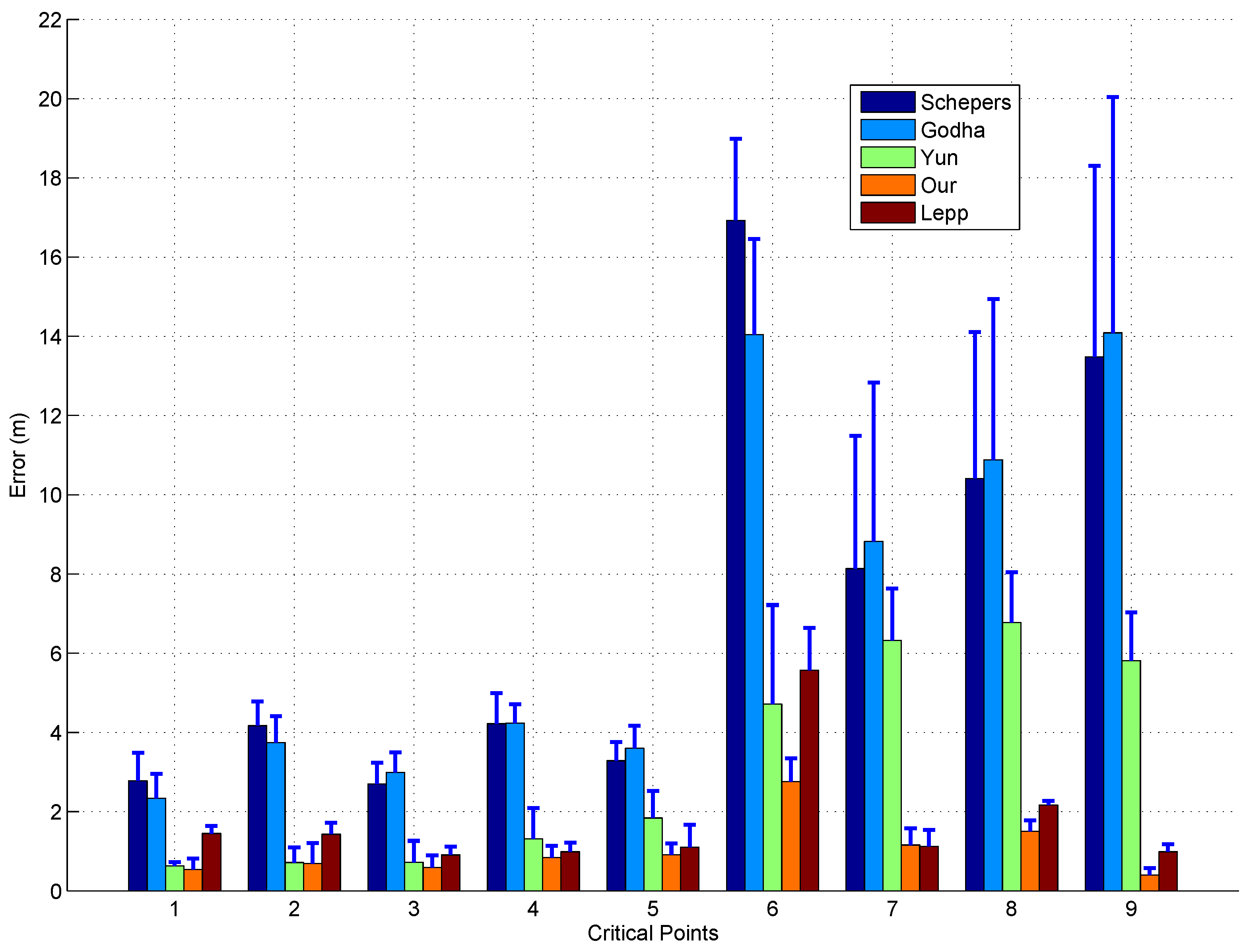
Figure 4, all the critical turning points including the last point along the predefined path were taken into consideration in our experiment. The locations of these points were manually extracted from the position estimates provided by the four different methods, and then the distance differences between the estimated positions and actual positions of these points were calculated to evaluate the performance of different methods quantitatively.
Figure 5 shows the average distance errors and standard deviations between the estimated position and actual position of the 9 critical points from the 5 trials. As can see from the figure, the distance errors have increased significantly as the walking distance increases. This is mainly because the accumulated integration drift will not only affect the current location estimation, but also affect the future location estimation as well. Therefore, once any certain location estimation has a relative large error, the error will pass to the future location estimations and make them also have large errors. Via integration of the priori map information, the accumulated integration drift can be reset, thus even when there is a location estimation with a relative large estimation error, the future location estimation is rarely affected by the error. Taking the critical point 6 for example, for all the five estimation methods, the errors at this point increase significantly over the previous 5 points, which is mainly because that the straight line distance from the original point is the largest. For the three traditional ZUPT methods, the errors at the 3 future points are also very large; however, when the priori map information is taken into consideration in our method and Lepp’s method, the errors at the 3 future points are much smaller than that at the point 6. In summary, integration of the ZUPT-based method with priori map information can achieve much better results than only applying the ZUPT alone. As can also see from the figure, our method surpassed the Lepp’s method slightly. The estimation error over all critical points by our method was 1.03 ± 0.17 m, while that from Lepp’s method was 1.74 ± 0.18 m.
Although the outdoor movement can be estimated by GPS easily, we still insist it is worthwhile to evaluate our method in the outdoor environments since GPS signal may not be stable at some points; therefore, some preliminary outdoor closed-loop walking experiments outside our laboratory building were also performed. As shown in
Figure 6, the predefined walking path was indicated by the grey solid lines. From the starting position which is the original point in the figure, the subjects walk along the path, make several turns and walk back to the starting position to close the loop. Since our building is surrounded by border hedge and plant, we can assume that the subjects cannot cross the hedge and plant during their walking. On the other side of the road, it is the parking spaces which are normally occupied by vehicles, thus we can also assume the subjects cannot cross the other side either, and they can only walk along the road. Therefore, the road information, given by the light green lines in
Figure 6, was acquired in advance and used as the priori map information in our experiments. Similar to the indoor experiments,
Figure 6 gives one example of position estimation result for outdoor walking, while
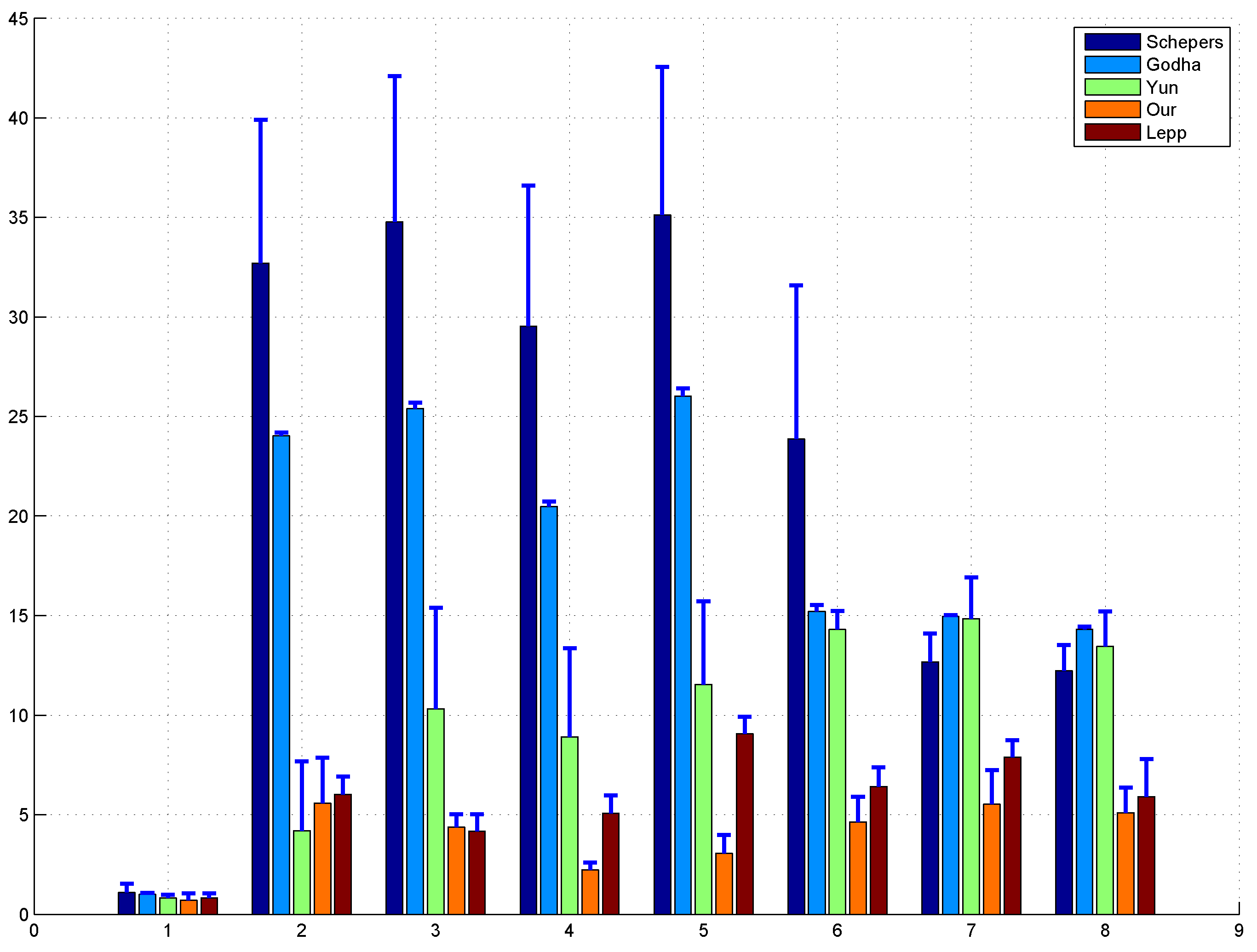
Figure 7 shows the average and standard deviation of distance errors between the estimated positions and actual positions of the 8 critical points which were marked by the square number plates in
Figure 6 over 5 trials. As can see from these two figures, we can also have (1) the proposed method can achieve the smallest position errors compared with the other three traditional ZUPT methods, which means that the integration of ZUPT and map information can improve the position estimation accuracy significantly; (2) our method also surpassed the Lepp’s method slightly, and the estimation error over all critical points were 3.89 ± 1.10 m and 5.76 ± 0.95 m, respectively, which is mainly due to the existence of inaccurate step length estimation and heading direction error in Lepp’s method; and (3) Yun’s method outperformed the other two ZUPT methods due to the application of a time-variant velocity drift error to revise the acceleration in the non-stance phase. We also noticed that the estimation error of our proposed method has some certain increment for the outdoor walking over that of the indoor walking. The reason for that is the map information used in the outdoor tracking experiment is not as good as the one used for the indoor tracking. In general, the width of a corridor is less than 2 m, while the width of road is larger than 6 m. It means that for the outdoor tracking the map can tolerate much higher errors before resetting the acceleration integration drift; therefore, the accuracy of the proposed method for the outdoor tracking has some slight decrement. Similarly, Lepp’s method also suffered from the degraded heading direction estimation due to the inaccurate map information. On the other side, due to the uncertainty in the step length estimation, the walking trajectory derived from Lepp’s method got significant errors.
In our previous works [
10,
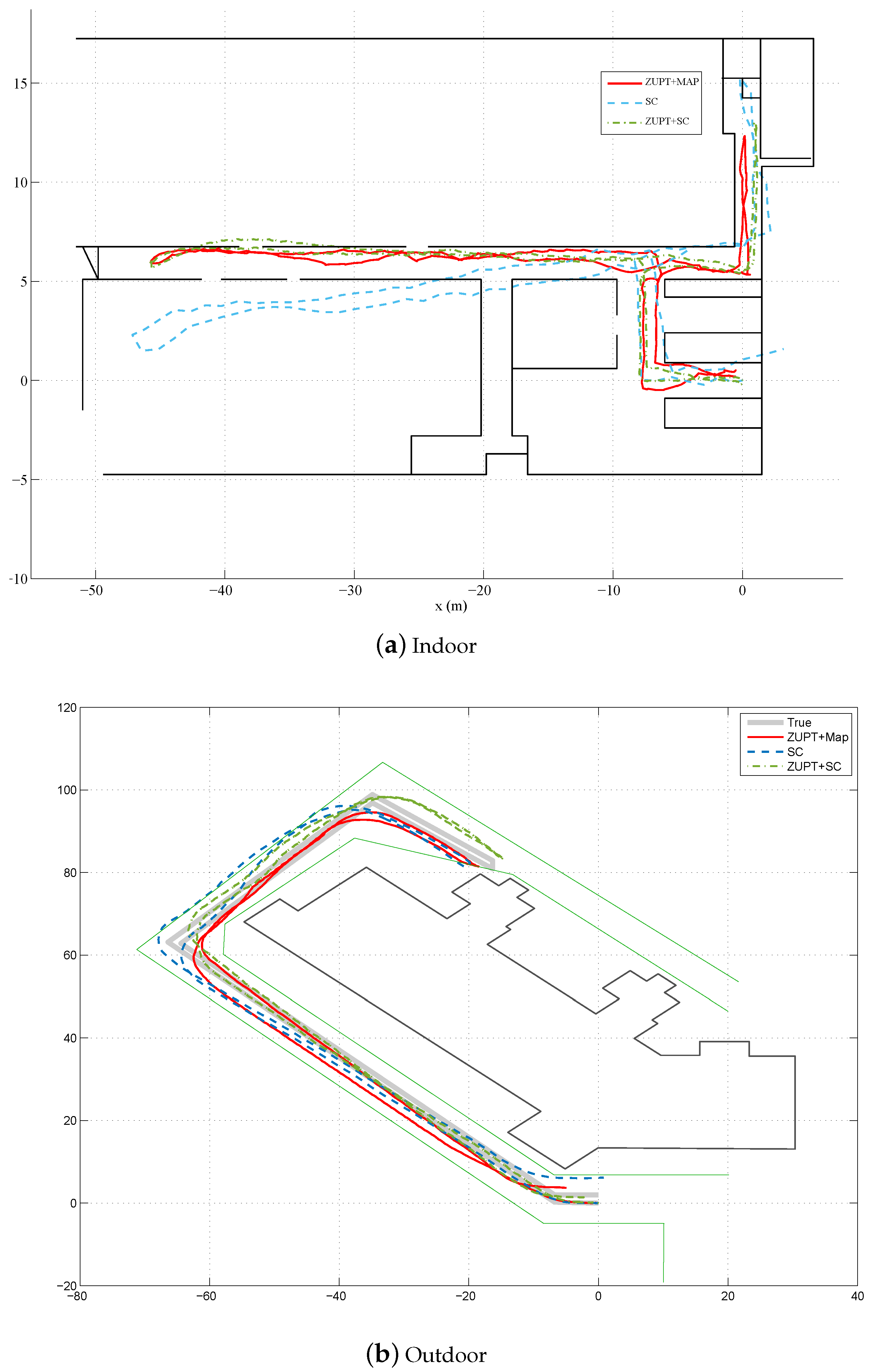
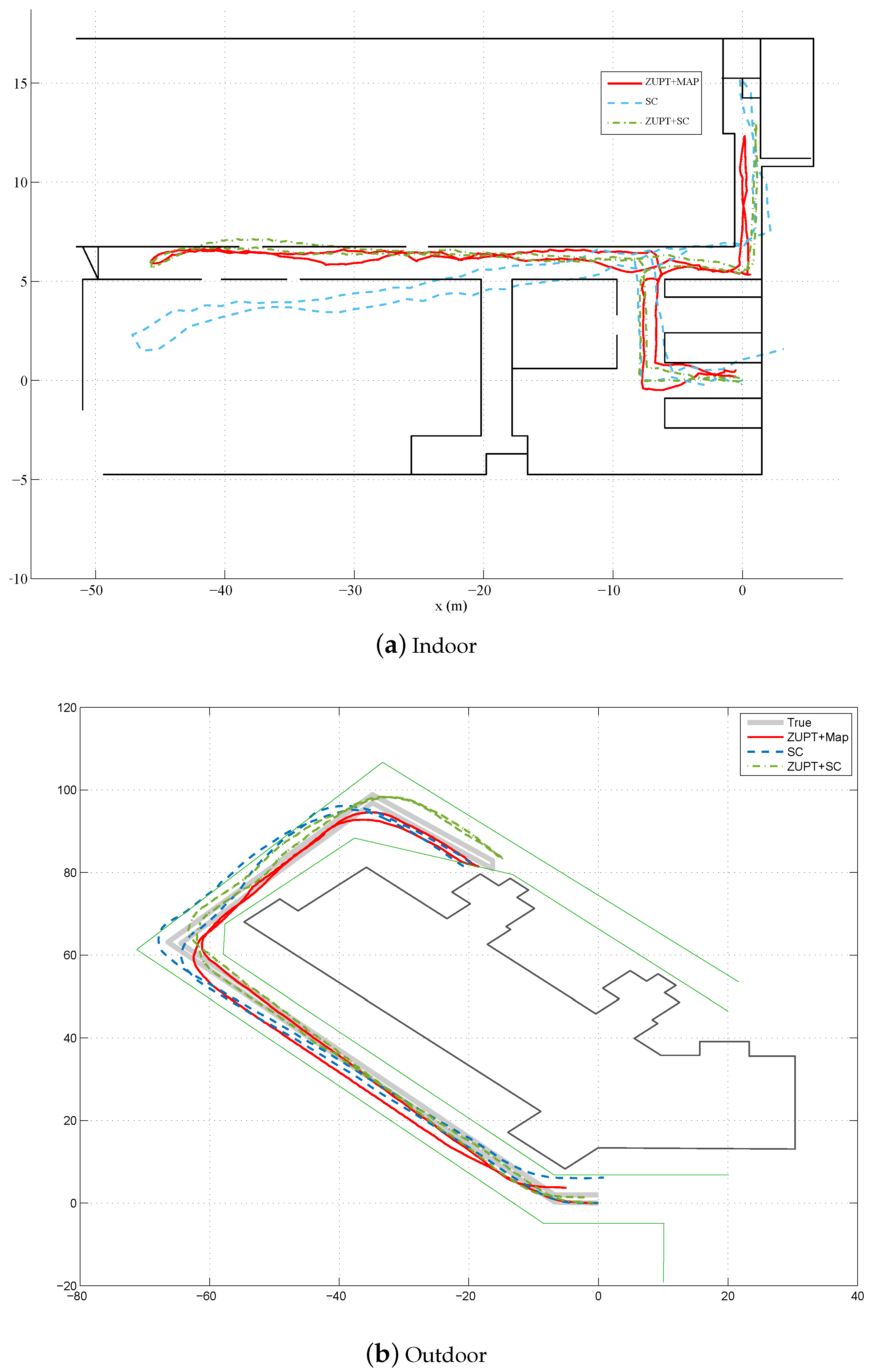
12], we investigated fusion of step counter with ZUPT method for pedestrian location estimation. To demonstrate the pros and cons of these methods, the comparative estimation results of these methods are also given in
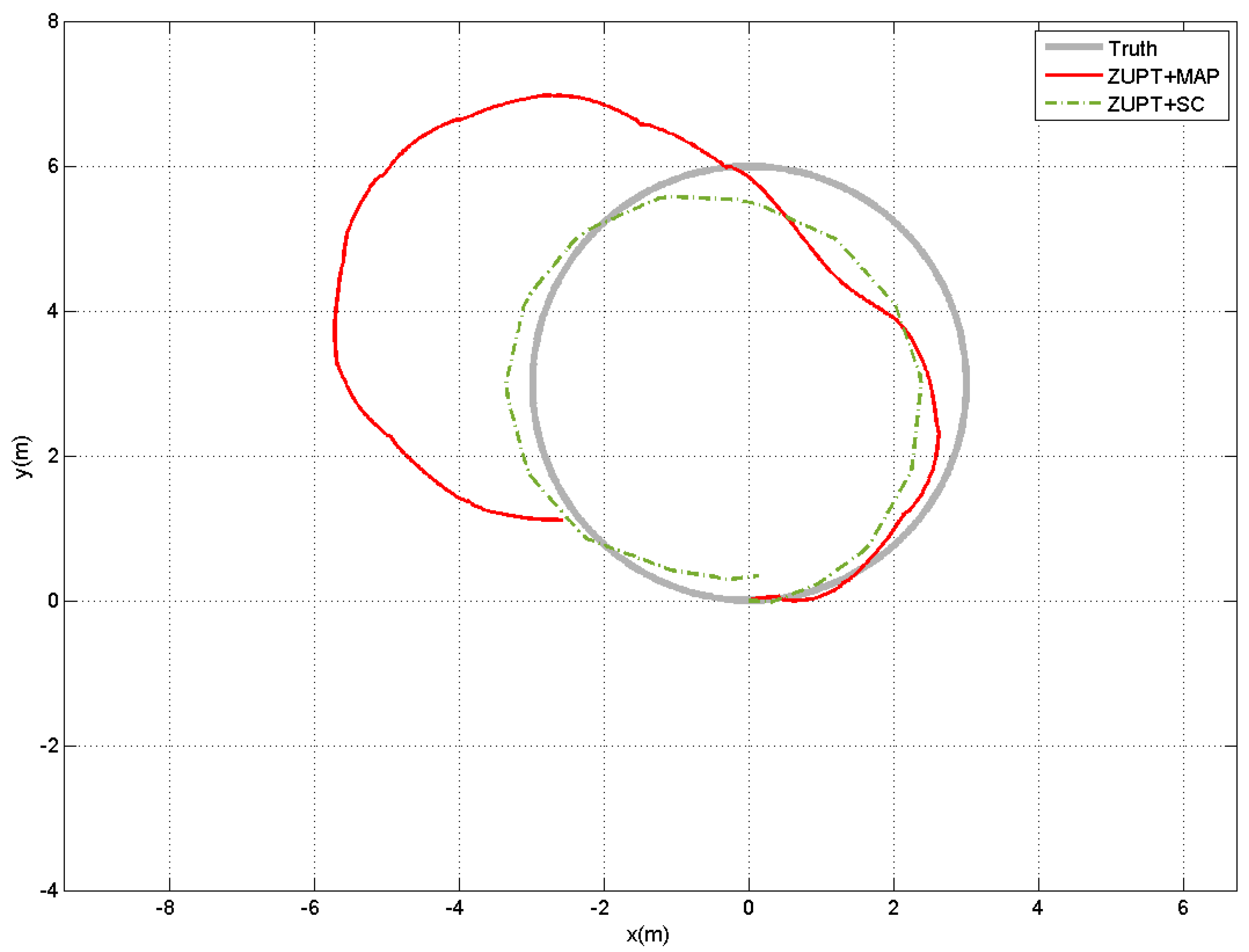
Figure 8. From both the indoor and outdoor scenarios, we can see that the fusion based methods can outperform the step counter based method, no matter fusing ZUPT with step counter information or fusing ZUPT with map information. Meanwhile, ZUPT+step counter fusion method and ZUPT+map fusion method can achieve quite similar performance. Sometimes, particularly when the map information is very accurate, the ZUPT+map fusion method shows some advantages over ZUPT+step counter fusion method. Take some certain points, such as (−40,7) in the indoor scenario as shown in
Figure 8 for example, the estimated trajectory by ZUPT+step counter fusion method may enter into the other side of the corridor. However, this kind of errors can be easily removed by the priori map information. Furthermore, both of our previous works involve stride length estimation, which require to use a specific parameter
K, while the ZUPT+map fusion method does not need such information. Although such parameter can be determined through offline training by collecting some walking data before the actual experiments from the subject, the value of such parameter may still change for the same person due to some other factors, such as different types of shoes, different sensor sensitivities, different ground surface materials and so on. It means the offline training should be performed frequently before data collections. In contrast, the map information is relatively stable, which does not need to be updated often.
When the quality of the map information decreases, the performance of the ZUPT+map information method also declines accordingly. As shown in
Figure 8b, the outdoor tracking performance of our method has some slight decrement, while ZUPT+step counter fusion method is more resilient to such variations. However, ZUPT+step counter fusion method may even slightly outperform the ZUPT+map information method, particulary when the map information is not accurate at all. In our experiment, we considered some extreme scenarios when the map information was not available or useable. The subjects were asked to walk inside a big hall where the wall was quite far from the walking region, thus the wall information could not be used for position estimation any more. In this case, the likelihood function for the binary measurements
in Equation (
17) will be set to 1 automatically, and the map information is not activated and only the ZUPT information is used in the estimation process to deal with the acceleration double integration drift.
Figure 9 shows an example of the estimated displacement results by this method. It is obvious that the less quality the map is, the less contribution of map information to the ZUPT+map method, and the ZUPT+map method would be more equivalent to the ZUPT only method. It is also clear that the ZUPT+step counter fusion method achieves better performance than the ZUPT+map method. Furthermore, the estimation of ZUPT+step approach always falls into the map region, which means that the map actually does not provide extra information. We also notice that the performance of ZUPT+map method varies a lot among trails. For some trials, it can get reasonably good results while the others have significant errors in the estimated position. In contrast, the ZUPT+step counter fusion method can get consistent results for all the 5 trials performed in our experiment. This is mainly because without the map information the accumulated ZUPT errors cannot be removed. Therefore, to reset the acceleration double integration drift and increase the accuracy of the ZUPT-based position estimation methods, extra information, such as vector map information, step counter information, human biomechanical model information and so on, should be incorporated to further reduce the uncertainty of walking trajectories.
Another weakness of the ZUPT+map information method is that it requires to represent the map information in the global coordinate system. In general, the map information usually reflects the structure of a building, and it is normally given in the earth coordinate system. Therefore, it is critical to align the map information in the global coordinate system and make it useable for particle filter. Currently, there is no good method to solve this problem, so in our implementation we manually adjusted the subject initial orientation to minimise such errors.
It is also worth to mention that another source for estimation error is the misalignment between the map coordinate system and the global coordinate system. In our implementation, we implicitly assumed that the map coordinate system was perfectly aligned with the global coordinate system after sensor to body alignment calibration [
23]. However, there are some orientation errors between these two coordinate systems. In theory, the determination of such differences between any two coordinate systems can be modelled as a hand-eye calibration problem, and there are many different approaches have been proposed as far [
29]. In practice, it is quite challenging to acquire the sensor orientation information in the map coordinate system; therefore, we did not apply the hand-eye calibration but manually adjusted the subject initial orientation to minimise such errors. Although we have tried our best, the map coordinate system might still not be perfectly aligned with the global system in use, which thus could also bring in some estimation errors in our experiments.
In order to get good location estimation results, motion-induced linear acceleration should be derived as accurate as possible by Equation (
3), which depends on the performance of orientation estimation algorithm. In our implementation, we applied our previous method proposed in [
26]. In general, such a method can provide accurate orientation estimation (less than 3° RMS error). However, there are definitely some errors in the orientation estimation, particularly when the strong linear acceleration interference and the magnetic disturbance last for a long time. The main reason is due to the inevitable gyroscope integration drift. When the interference and the disturbance exist, our method relies on the gyroscope measurement only, and accelerometer and magnetometer measurements are not able to compensate the gyroscope integration drift. Thus, we have to explore different methods, such as ZUPT and the map information, to compensate for the errors existed in the derived motion-induced linear acceleration for good position estimation.
The last thing to discuss is the potential tradeoff between computational complexity and estimation accuracy while applying particle filter. Though it can be run in real-time on off-the-shell micro computers, the number of particles might affect both the position estimation accuracy and the real-time performance in embedded devices. To make the algorithm implementable in low-cost embedded platforms, effects of particle number as well as subject walking speed on the computational complexity and estimation accuracy should be further investigated in the future.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}