A Novel Adaptive H∞ Filtering Method with Delay Compensation for the Transfer Alignment of Strapdown Inertial Navigation Systems

Abstract
:1. Introduction
2. Transfer Alignment Model
2.1. SINS Error Dynamics Model
2.2. Measurement Model
3. Adaptive H∞ Filtering Method with Delay Compensation
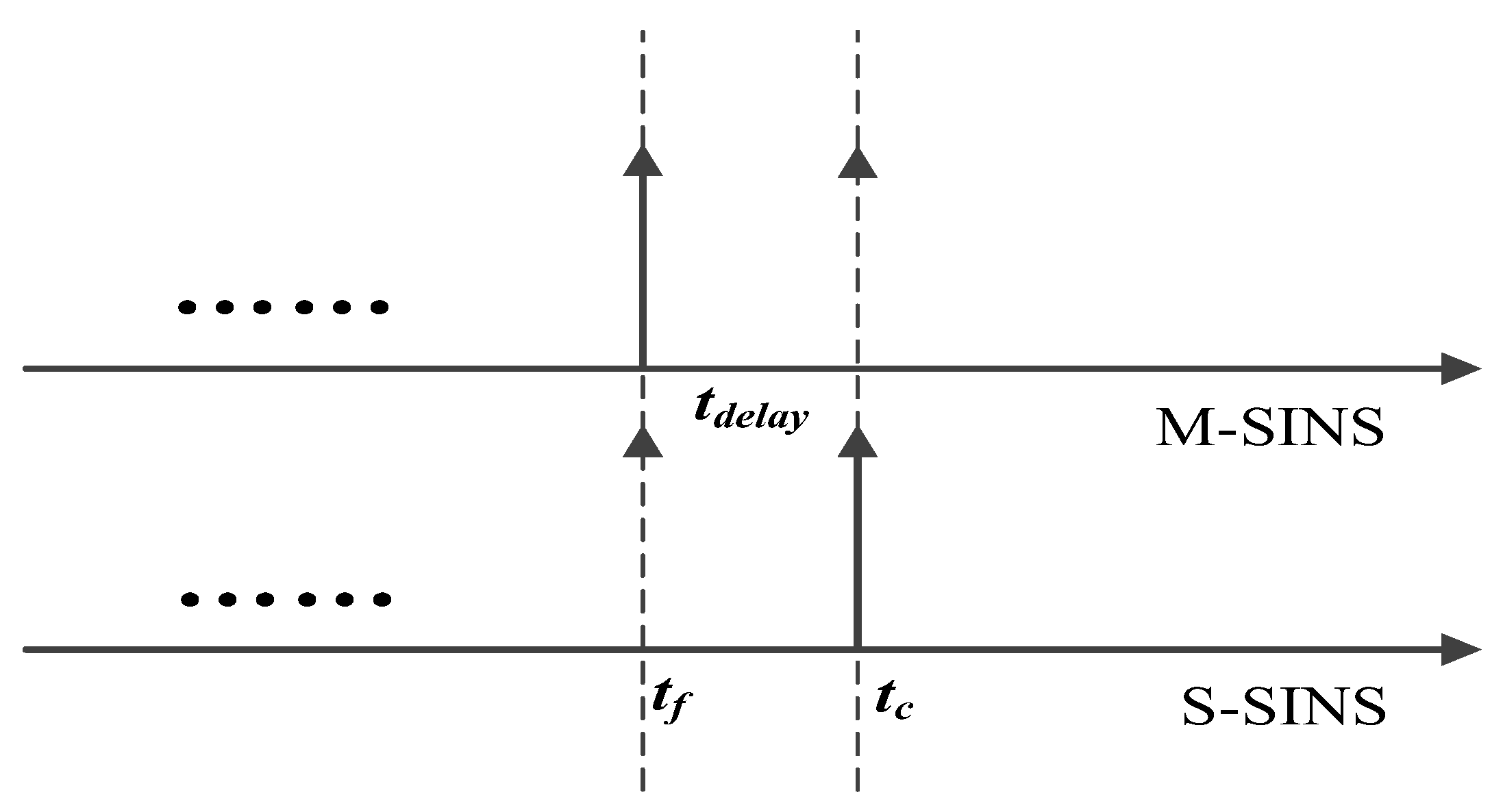
3.1. Analysis of Time Delay
3.2. H∞ Filtering Method with Delay Compensation
3.2.1. H∞ Filtering Theory with Delay Compensation
3.2.2. Robust Mechanism Analysis of H∞ Filtering Theory
3.3. Adaptive H∞ Filtering Method with Delay Compensation
4. Experimental Results and Discussions
4.1. Experimental Settings
4.2. Experimental Results and Discussions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lu, J.Z.; Xie, L.L.; Li, B.G. Analytic Coarse Transfer Alignment Based on Inertial Measurement Vector Matching and Real-Time Precision Evaluation. IEEE Trans. Instrum. Meas. 2016, 65, 355–364. [Google Scholar] [CrossRef]
- Li, W.L.; Wu, W.Q.; Wang, J.L.; Lu, L.Q. A fast SINS initial alignment scheme for underwater vehicle applications. J. Navig. 2013, 66, 181–198. [Google Scholar] [CrossRef]
- Tarrant, D.; Roberts, C.; Jones, D. Rapid and robust transfer alignment. In Proceedings of the IEEE Regional Conference on Aerospace Control Systems, Westlake Village, CA, USA, 25–27 May 1993; pp. 758–762. [Google Scholar]
- Liu, X.X.; Xu, X.X.; Liu, Y.T.; Wang, L.H. A fast and high-accuracy transfer alignment method between M/S INS for ship based on iterative calculation. Measurement 2014, 51, 297–309. [Google Scholar] [CrossRef]
- Gong, X.X.; Fan, W.; Fang, J.C. An innovational transfer alignment method based on parameter identification UKF for airborne distributed POS. Measurement 2014, 58, 103–114. [Google Scholar] [CrossRef]
- Gong, X.X.; Zhang, J.X. An innovative transfer alignment method based on federated filter for airborne distributed POS. Measurement 2016, 86, 165–181. [Google Scholar] [CrossRef]
- Shortelle, K.J.; Graham, W.R.; Rabourn, C. F-16 flight tests of a rapid transfer alignment procedure. In Proceedings of the IEEE Position Location & Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1996; pp. 379–386. [Google Scholar]
- Lyou, J.; Lim, Y.C. Transfer alignment error compensator design based on robust state estimation. Trans. Jpn. Soci. Aeronaut. Space Sci. 2005, 48, 143–151. [Google Scholar] [CrossRef]
- Xie, C.M.; Zhao, Y.; Yang, C.C. Influence and compensation of time-mark discrepancy in transfer alignment. J. Chin. Inert. Technol. 2010, 18, 414–420. [Google Scholar]
- Liu, H.G.; Chen, Z.G.; Chen, G. Time-delay’s effect on velocity matching transfer alignment. J. Chin. Inert. Technol. 2012, 20, 544–551. [Google Scholar]
- Lyou, J.; Lim, Y.C. Transfer alignment considering measurement time delay and ship body flexure. J. Mech. Sci. Technol. 2009, 23, 195–203. [Google Scholar]
- Lim, Y.C.; Lyou, J. An error compensation method for transfer alignment. In Proceedings of the Tencon IEEE Region 10 International Conference on Electrical and Electronic Technology, Singapore, 19–22 August 2001; pp. 850–855. [Google Scholar]
- Lim, Y.C.; Lyou, J. Transfer alignment error compensator design using H∞ filter. In Proceedings of the American Control Conference, Anchorage, AK, USA, 8–10 May 2002; pp. 1460–1465. [Google Scholar]
- Chen, G.; Zhou, C.; Liu, H.G. Influence of time delay for attitude angle matching transfer alignment. J. Chin. Inert. Technol. 2014, 22, 172–176. [Google Scholar]
- Ross, C.C.; Elbert, T.F. A transfer alignment algorithm study based on actual flight test data from a tactical air-to-ground weapon launch. In Proceedings of the IEEE Position Location & Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; pp. 431–438. [Google Scholar]
- Wang, Y.F.; Sun, F.C.; Zhang, Y.A.; Liu, H.P.; Min, H.B. Central Difference Particle Filter Applied to Transfer Alignment for SINS on Missiles. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 375–387. [Google Scholar] [CrossRef]
- Kain, J.E.; Cloutier, J.R. Rapid transfer alignment for tactical weapon applications. In Proceedings of the Guidance, Navigation and Control Conference, Boston, MA, USA, 14–16 August 1989; pp. 1290–1300. [Google Scholar]
- Jones, D.; Roberts, C.; Tarrant, D.; Yang, C.; Lin, C.F. Transfer alignment design and evaluation environment. In Proceedings of the IEEE Regional Conference on Aerospace Control Systems, Westlake Village, CA, USA, 25–27 May 1993; pp. 753–757. [Google Scholar]
- Gao, Z.H.; Mu, D.J.; Gao, S.S.; Zhong, Y.M.; Gu, C.F. Robust adaptive filter allowing systematic model errors for transfer alignment. Aerosp. Sci. Technol. 2016, 59, 32–40. [Google Scholar] [CrossRef]
- Zhang, Y.H.; Cheng, J.B.; Huang, Z.Y. Robust filtering and its application to SINS alignment. Int. Symp. Underwater Technol. 1998, 78, 228–232. [Google Scholar]
- Cheng, J.H.; Wang, T.D.; Song, C.Y.; Yu, D.W. Modified adaptive filter algorithm for shipborne SINS transfer alignment. Syst. Eng. Electron. 2016, 38, 638–643. [Google Scholar]
- Zhang, H.; Yang, S.; Mehr, A.S. Robust weighted H∞ filtering for networked systems with intermittent measurements of multiple sensors. Int. J. Adapt. Control Signal Proc. 2011, 25, 313–330. [Google Scholar] [CrossRef]
- Yue, X.K.; Yuan, J.P. H∞ sub-optimal filter for low-cost integrated navigation system. Chin. J. Aeronaut. 2004, 17, 200–206. [Google Scholar] [CrossRef]
- Liu, X.G.; Hu, J.T.; Wang, H. Research on integrated navigation method based on adaptive H∞ filter. Chin. J. Sci. Instrum. 2014, 35, 1013–1021. [Google Scholar]
- LU, C.X.; Tan, Y.H.; Zhu, B.C.; Zhou, L.Z. Reduced-order H∞ filtering for navigation with carrier phase. Sci. China Inf. Sci. 2014, 57, 1–10. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M. Sparse-Grid Quadrature H∞ Filter for Discrete-Time Systems with Uncertain Noise Statistics. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1626–1636. [Google Scholar] [CrossRef]
- Xie, L.H.; Lu, L.L.; Zhang, D.; Zhang, H.S. Improved robust H2 and H∞ filtering for uncertain discrete-time systems. Automatica 2004, 40, 873–880. [Google Scholar] [CrossRef]
- Zhu, X.L.; Wang, Y.Y.; Gan, Y. H∞ filtering for continuous-time singular systems with time-varying delay. Int. J. Adapt. Control Signal Proc. 2011, 25, 137–154. [Google Scholar] [CrossRef]
- Tamboli, P.K.; Duttagupta, S.P.; Roy, K. Adaptive Fading Memory H∞ Filter Design for Compensation of Delayed Components in Self Powered Flux Detectors. IEEE Trans. Nucl. Sci. 2016, 63, 371–373. [Google Scholar]
- Xu, S.Y.; Chen, T.W. Robust H∞ filtering for uncertain impulsive stochastic systems under sampled measurements. Automatica 2003, 39, 509–516. [Google Scholar] [CrossRef]
- Zhang, W.H.; Chen, B.S.; Tseng, C.S. Robust H-infinity filtering for nonlinear stochastic systems. IEEE Trans. Signal Proc. 2005, 53, 589–598. [Google Scholar] [CrossRef]
- Duan, Z.S.; Zhang, J.X.; Zhang, C.S.; Mosca, E. Robust H2 and H∞ filtering for uncertain linear systems. Automatica 2006, 42, 1919–1926. [Google Scholar] [CrossRef]
- Wang, S.G.; Wu, M.X.; Jia, Z.Z. Matrix Inequal; Science Press: Beijing, China, 2006; Volume 7, pp. 160–165. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
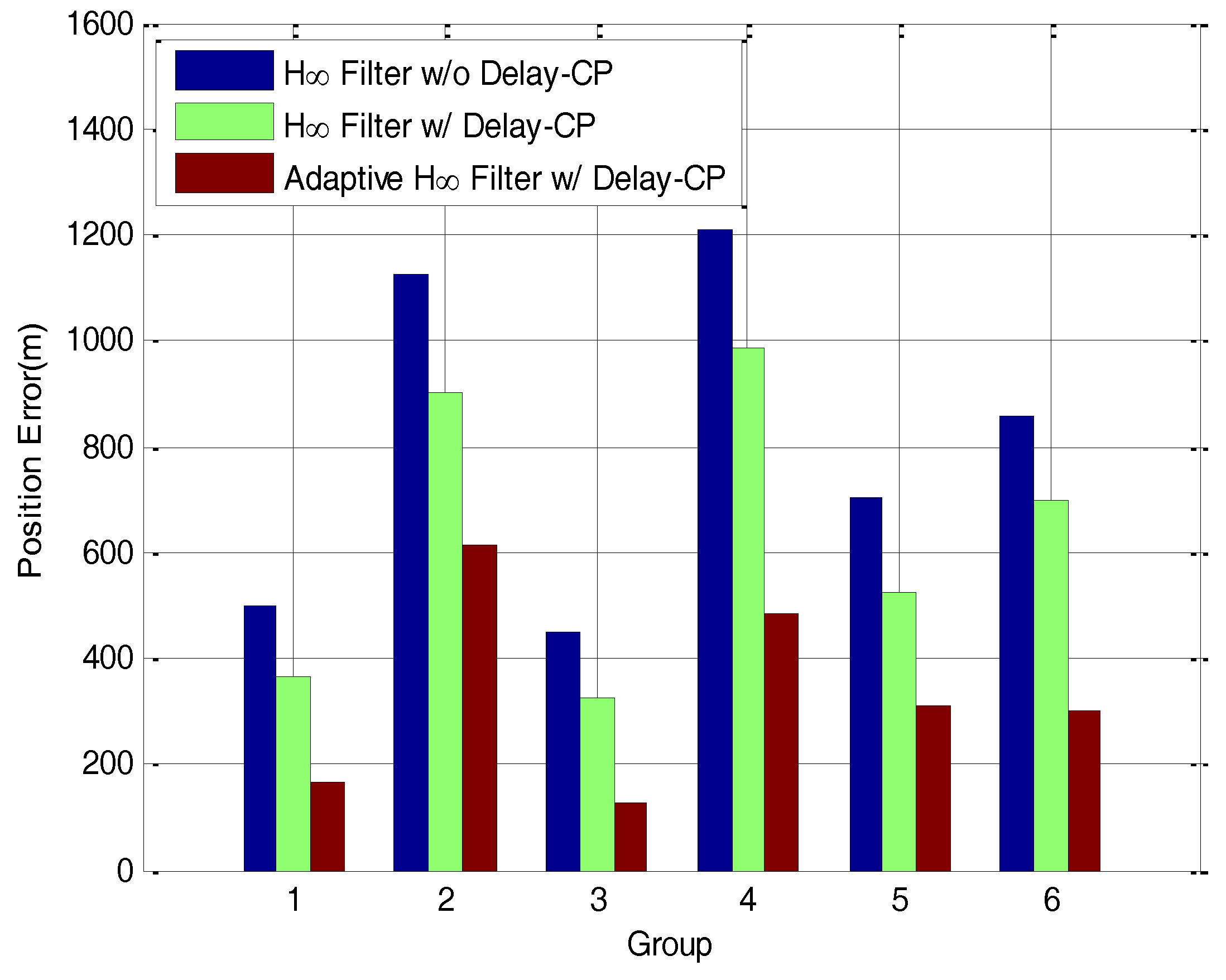
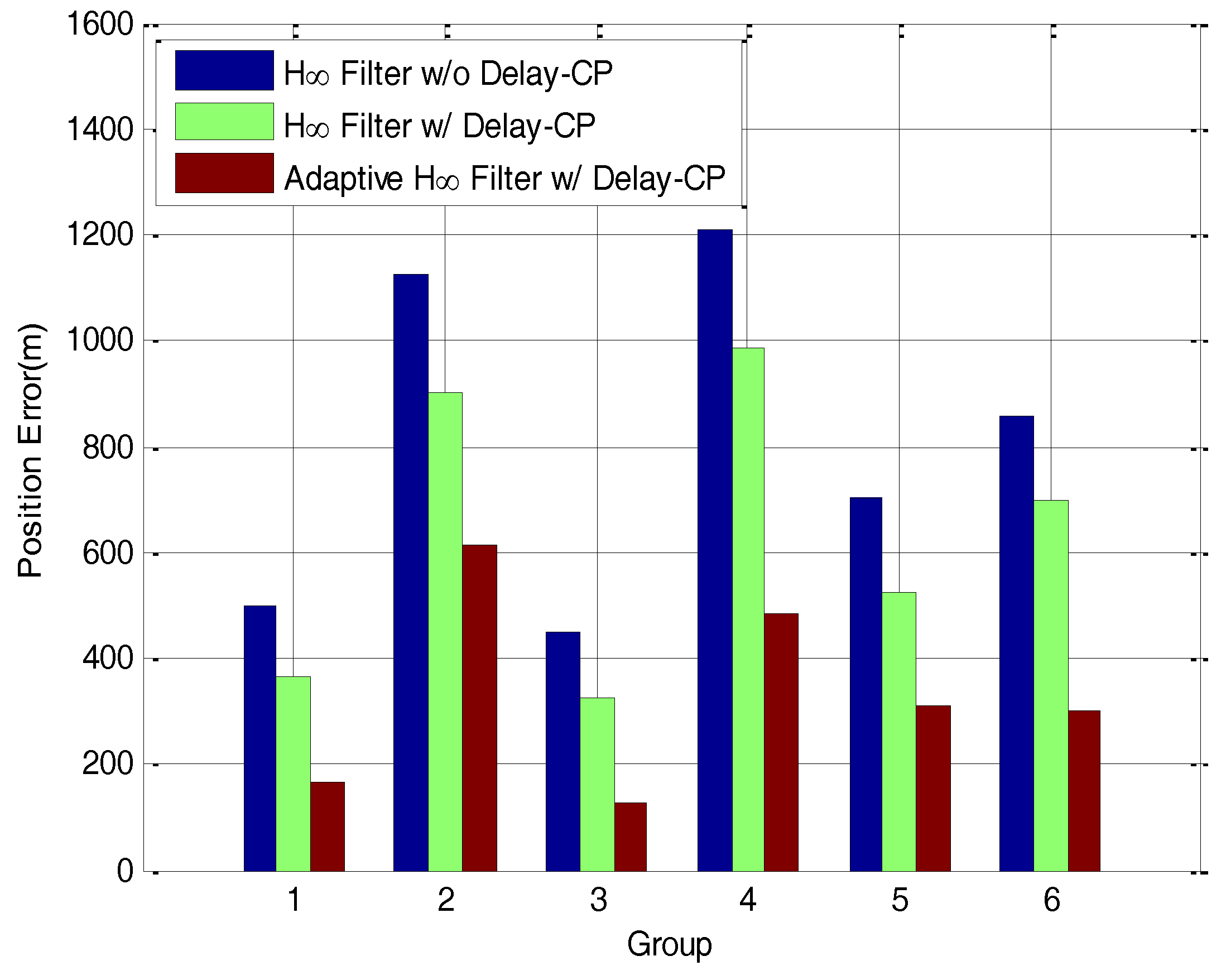
| Method | Group 1 | Group 2 | Group 3 | Group 4 | Group 5 | Group 6 |
|---|---|---|---|---|---|---|
| H∞ Filter w/o Delay-CP | 497.93 | 1126.84 | 452.31 | 1210.27 | 703.42 | 857.77 |
| H∞ Filter w/Delay-CP | 364.45 | 902.62 | 323.98 | 985.92 | 522.06 | 696.63 |
| Adaptive H∞ Filter w/Delay-CP | 166.69 | 614.55 | 128.09 | 486.46 | 310.28 | 302.34 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, W.; Cheng, X. A Novel Adaptive H∞ Filtering Method with Delay Compensation for the Transfer Alignment of Strapdown Inertial Navigation Systems. Sensors 2017, 17, 2753. https://doi.org/10.3390/s17122753
Lyu W, Cheng X. A Novel Adaptive H∞ Filtering Method with Delay Compensation for the Transfer Alignment of Strapdown Inertial Navigation Systems. Sensors. 2017; 17(12):2753. https://doi.org/10.3390/s17122753
Chicago/Turabian StyleLyu, Weiwei, and Xianghong Cheng. 2017. "A Novel Adaptive H∞ Filtering Method with Delay Compensation for the Transfer Alignment of Strapdown Inertial Navigation Systems" Sensors 17, no. 12: 2753. https://doi.org/10.3390/s17122753