A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment


Abstract
:1. Introduction
2. Prior Works
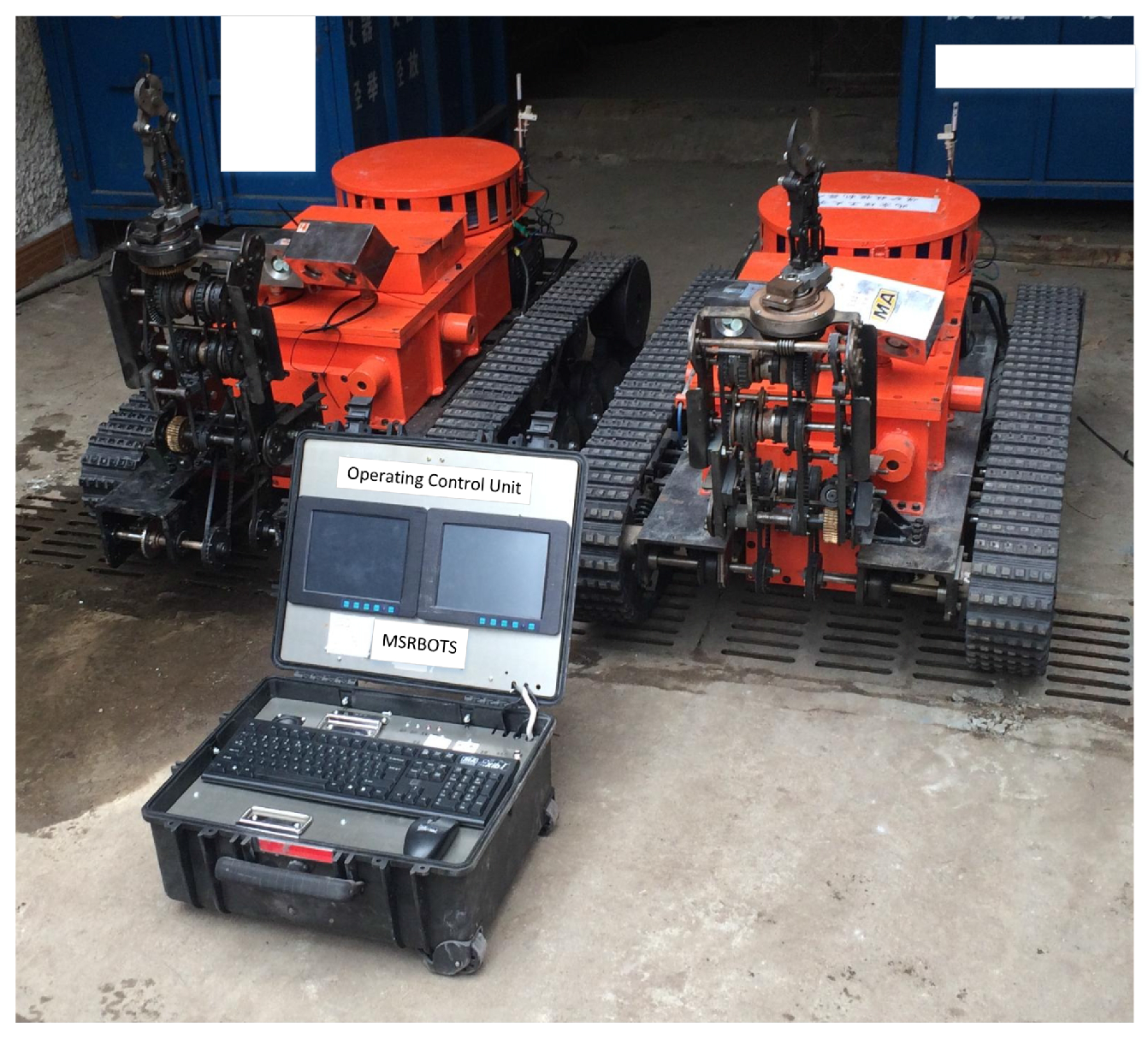
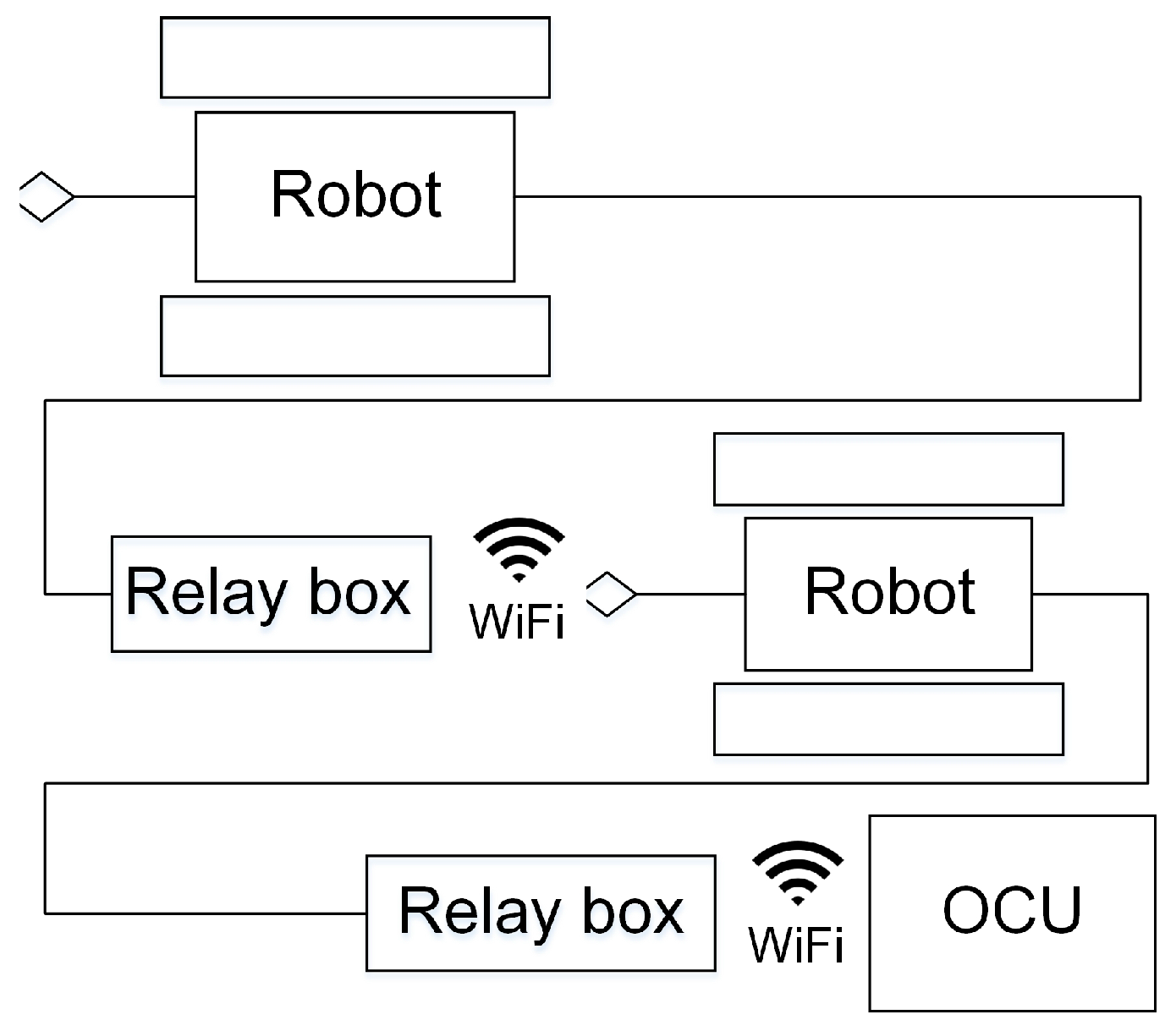
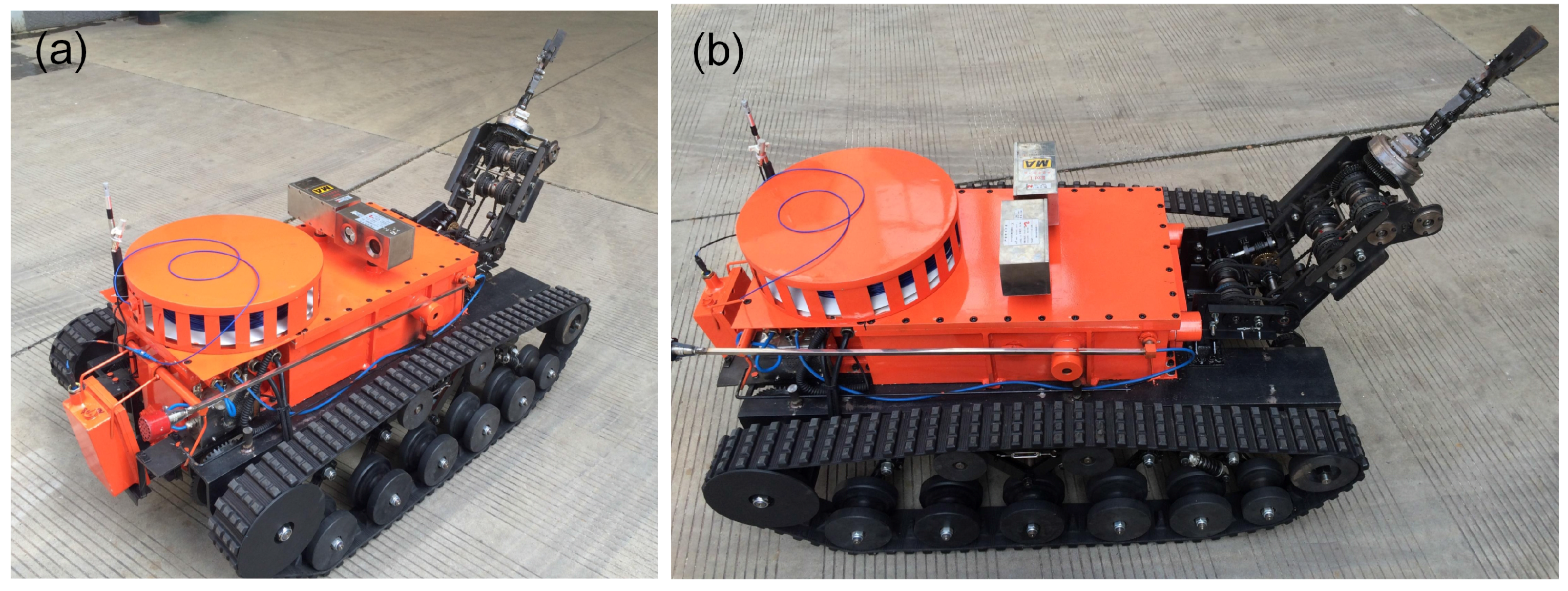
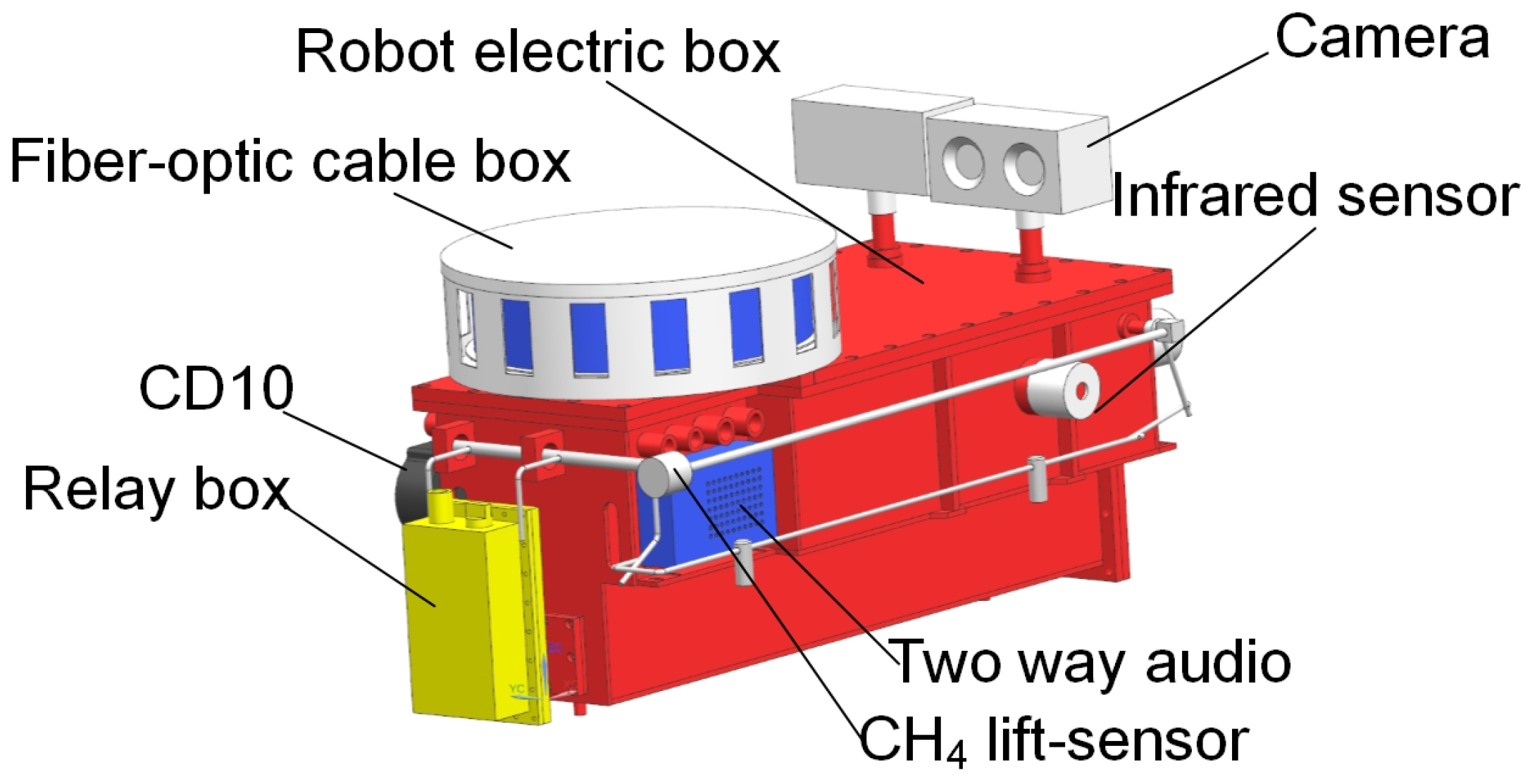
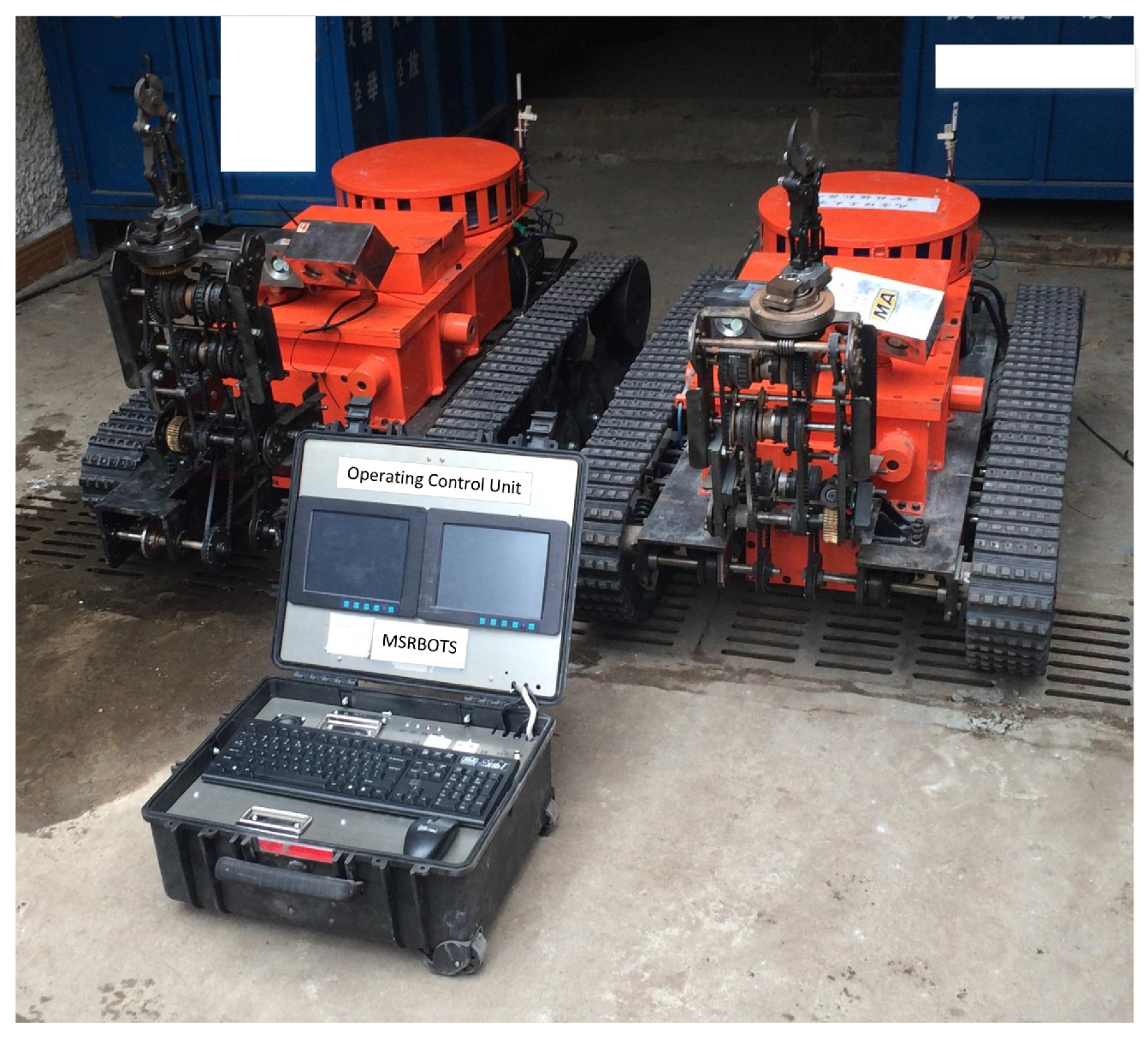
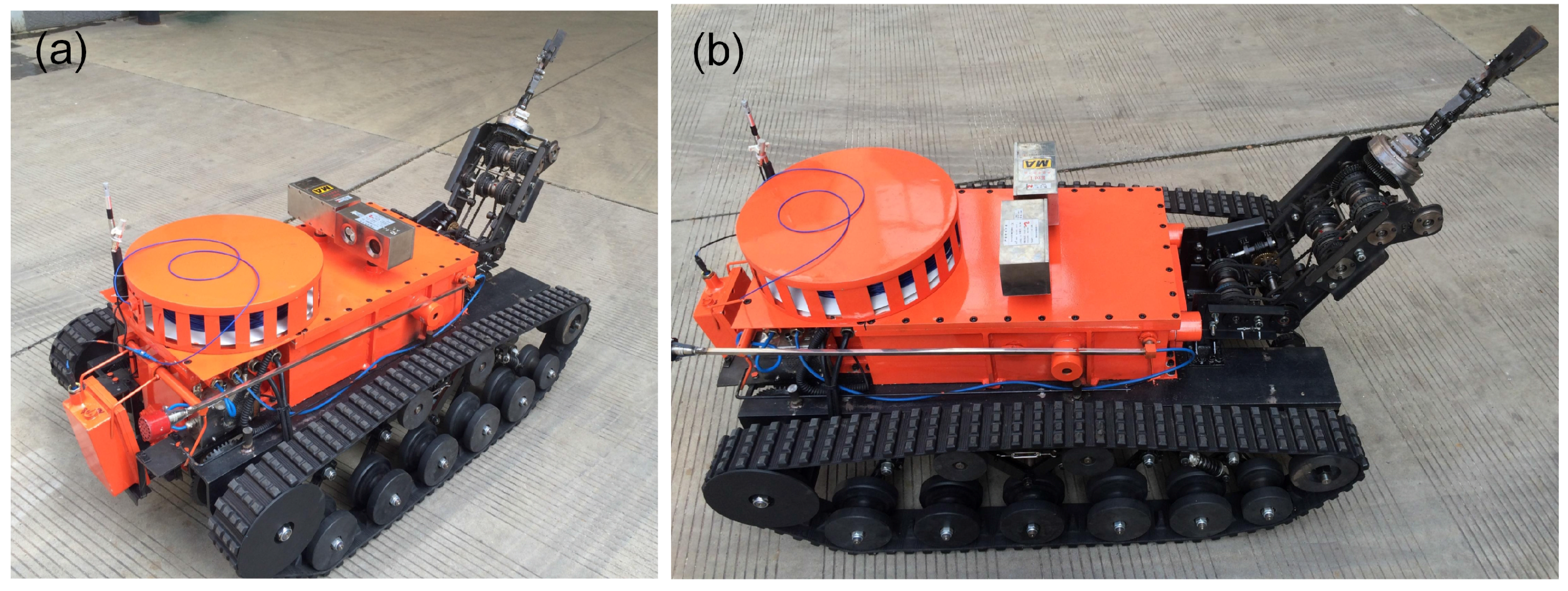
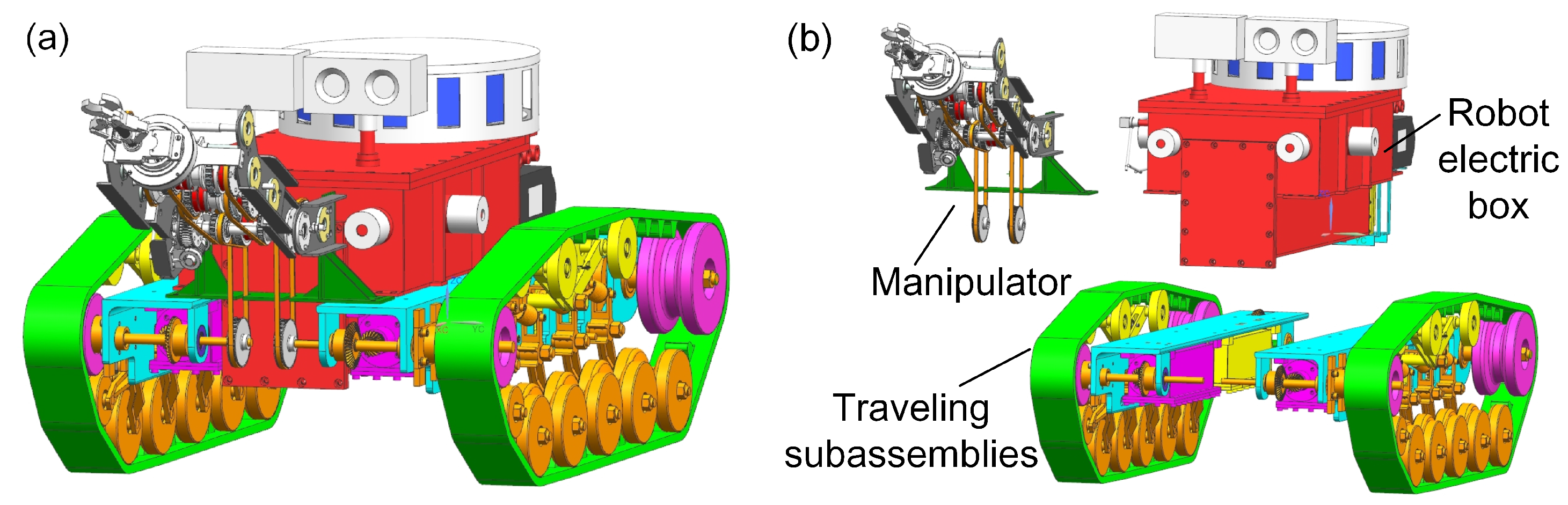
3. General Structure of MSRBOTS
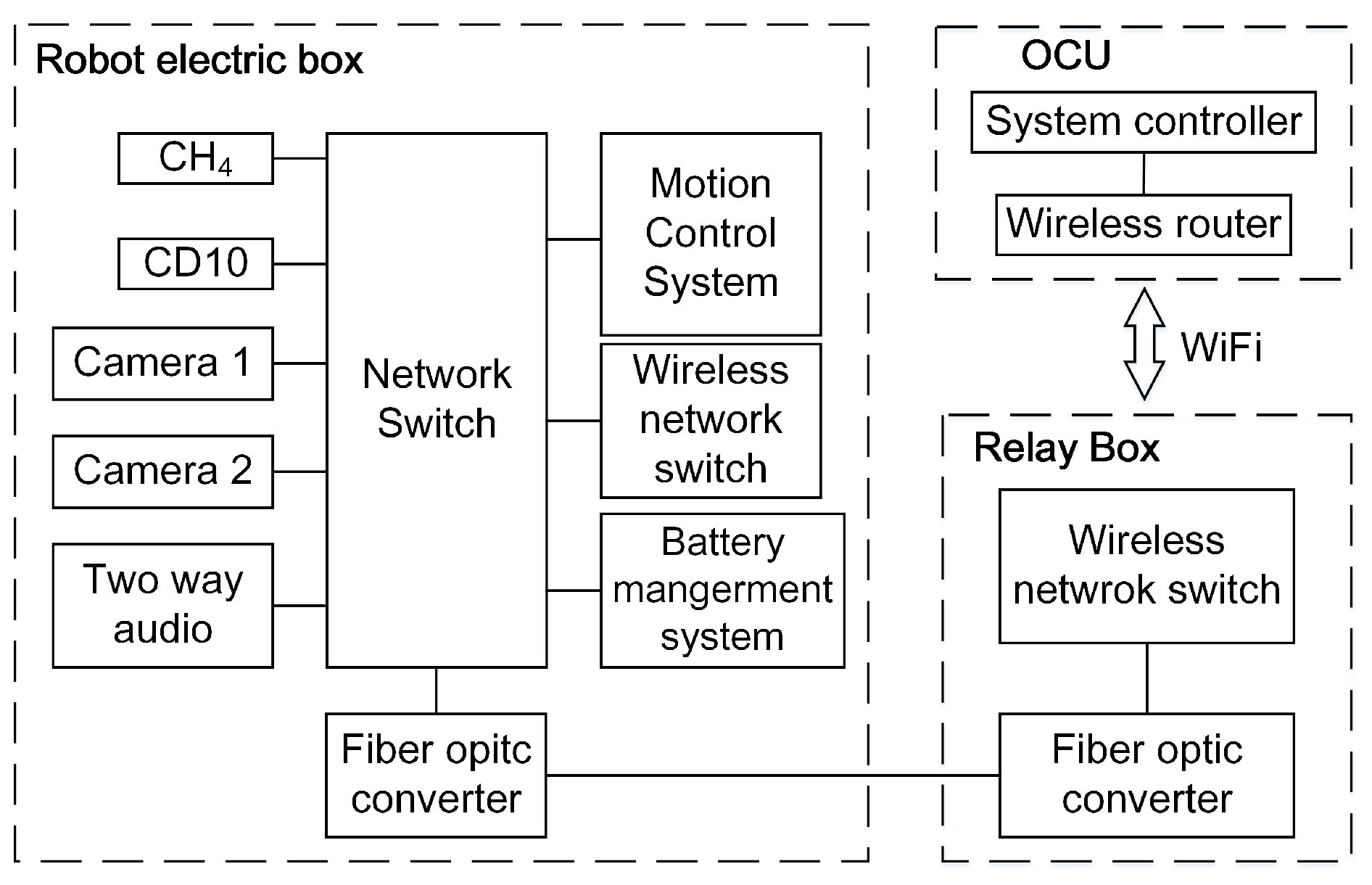
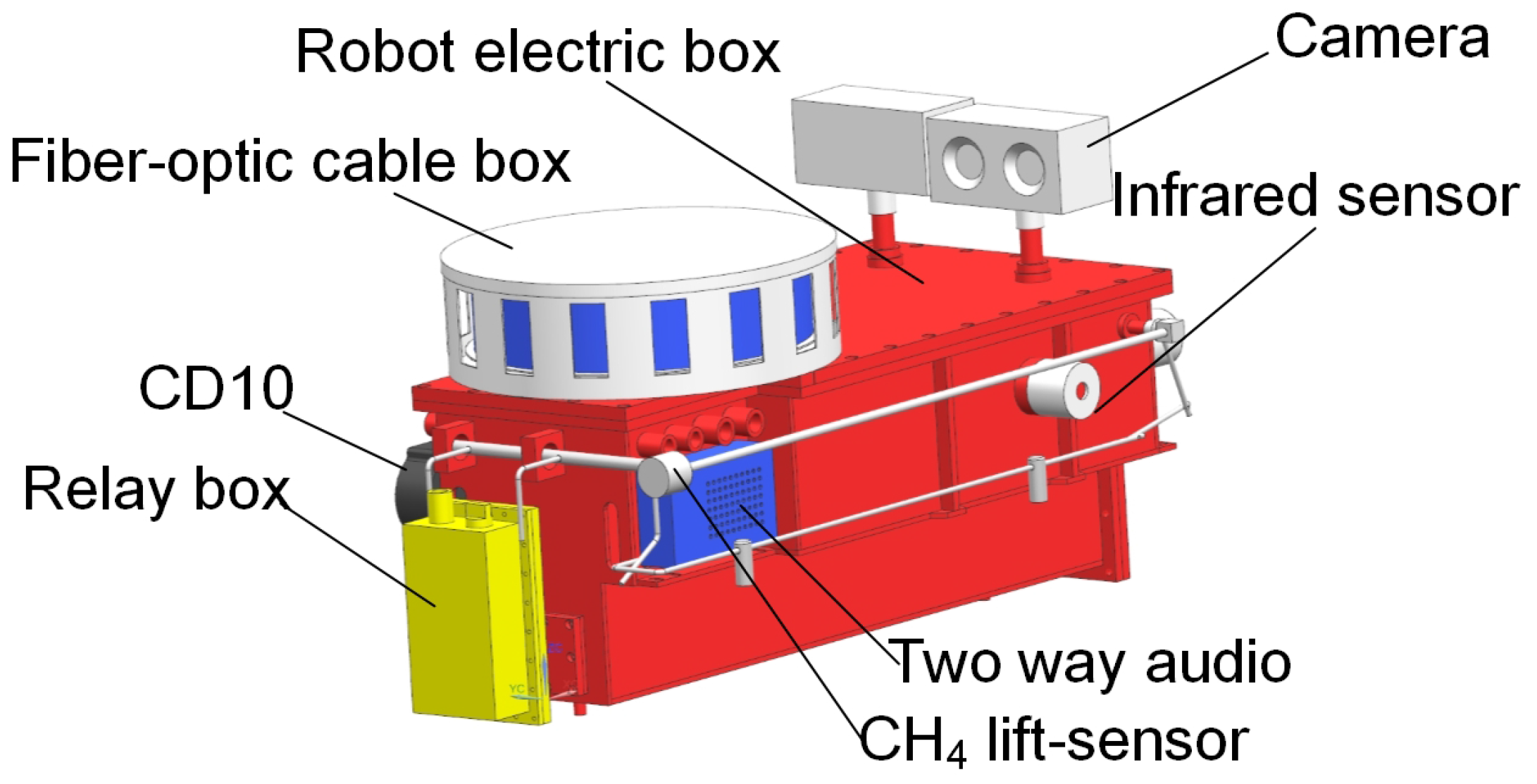
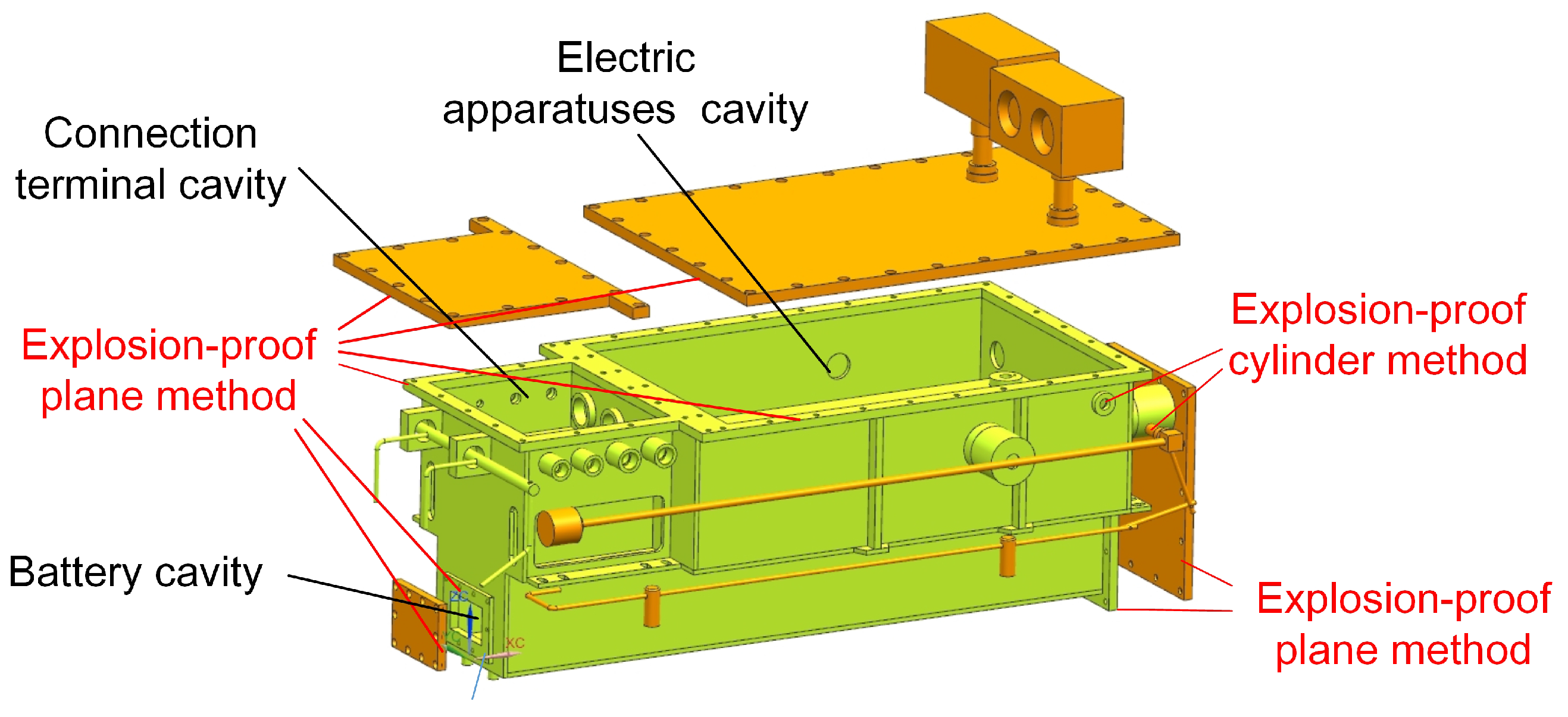
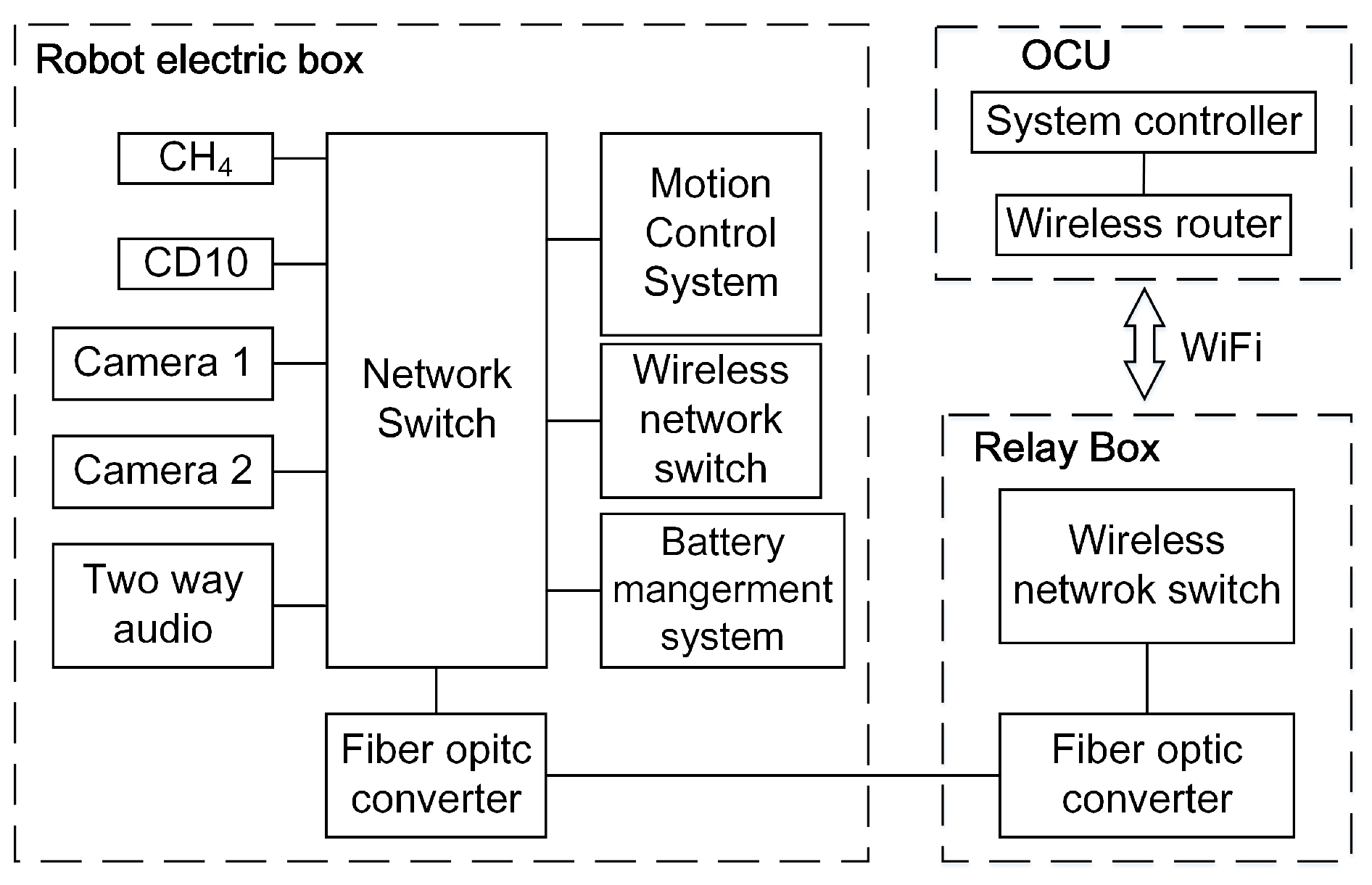
3.1. The Robot Electric Box
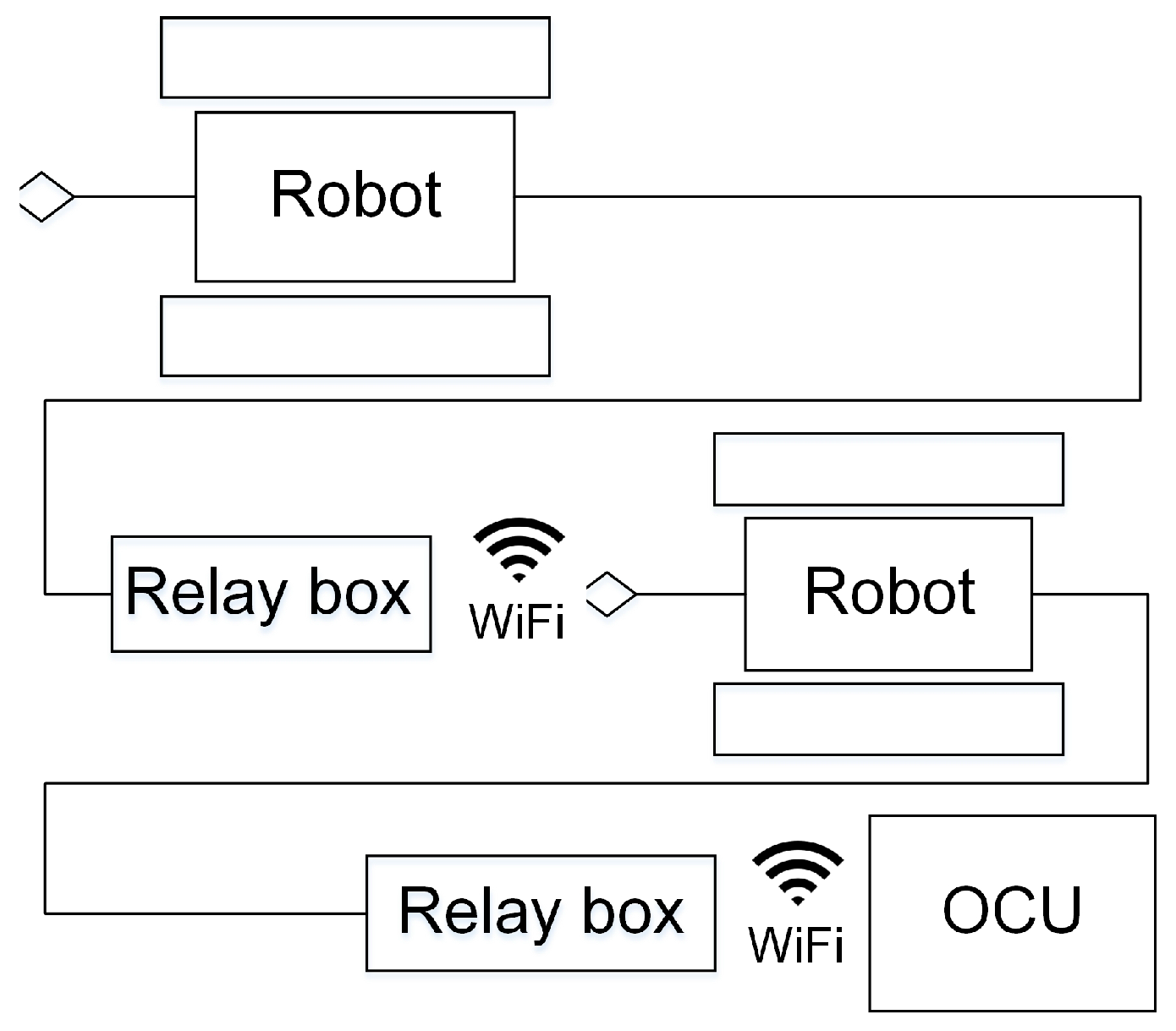
3.2. The Fiber-Optic Cable Box and OCU
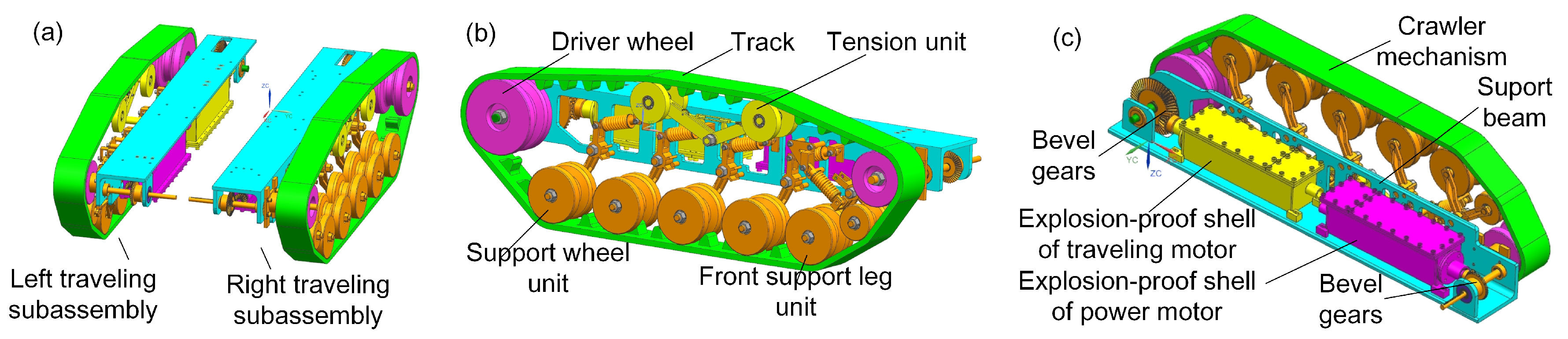
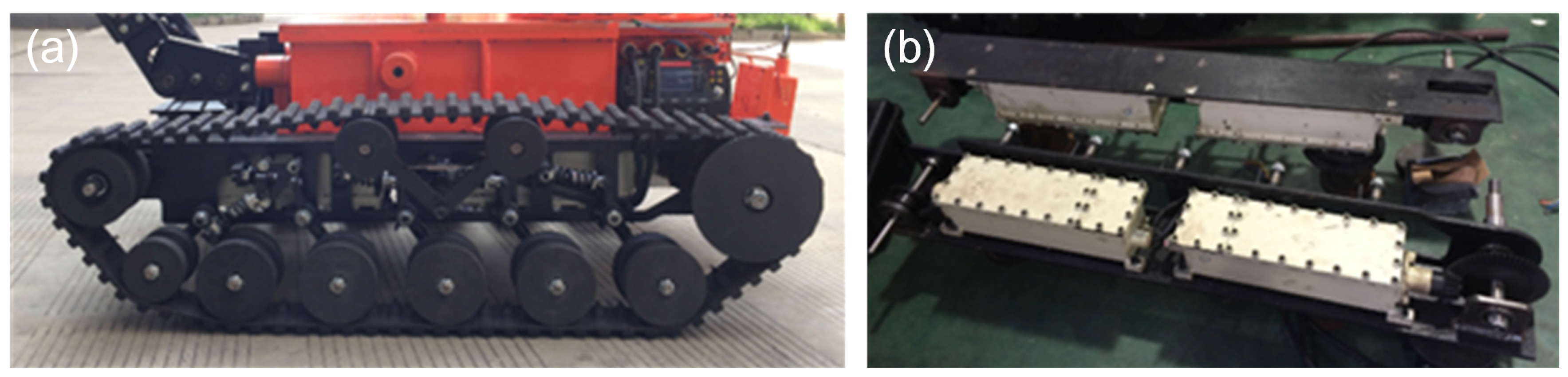
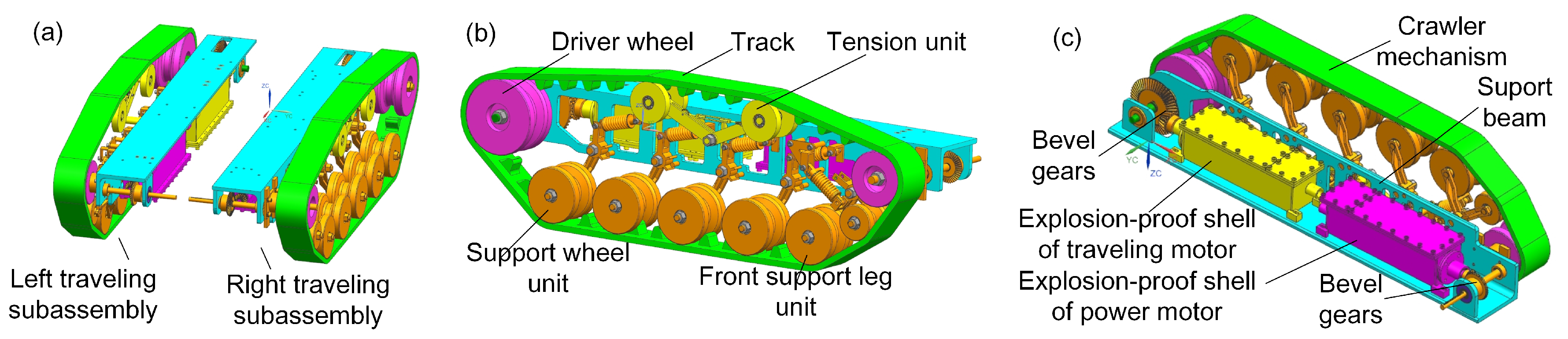
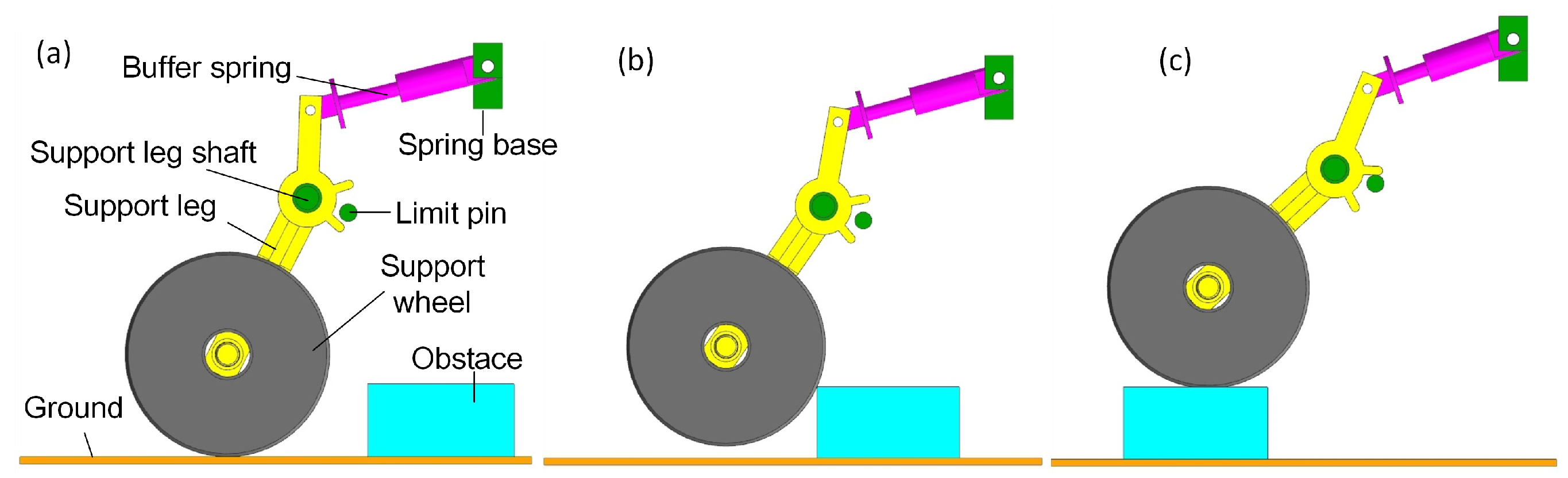
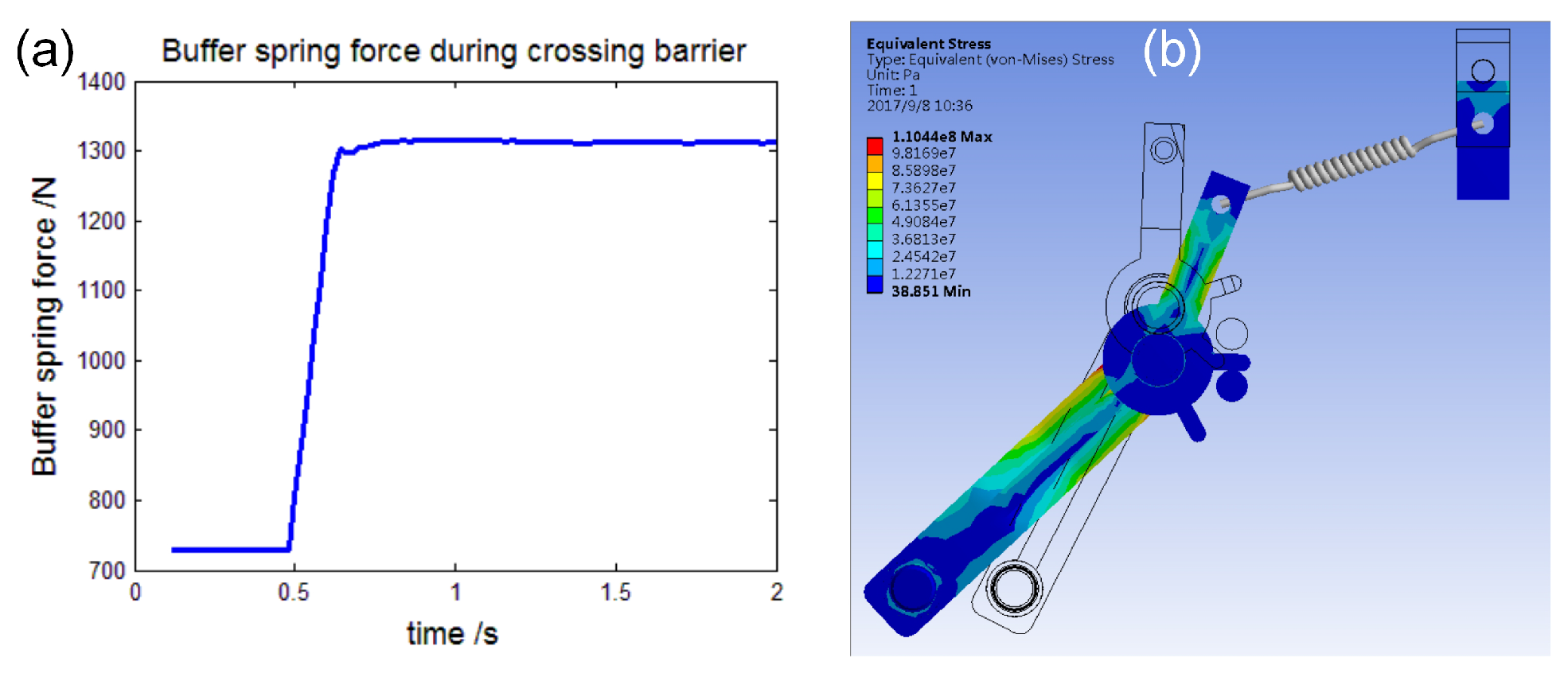
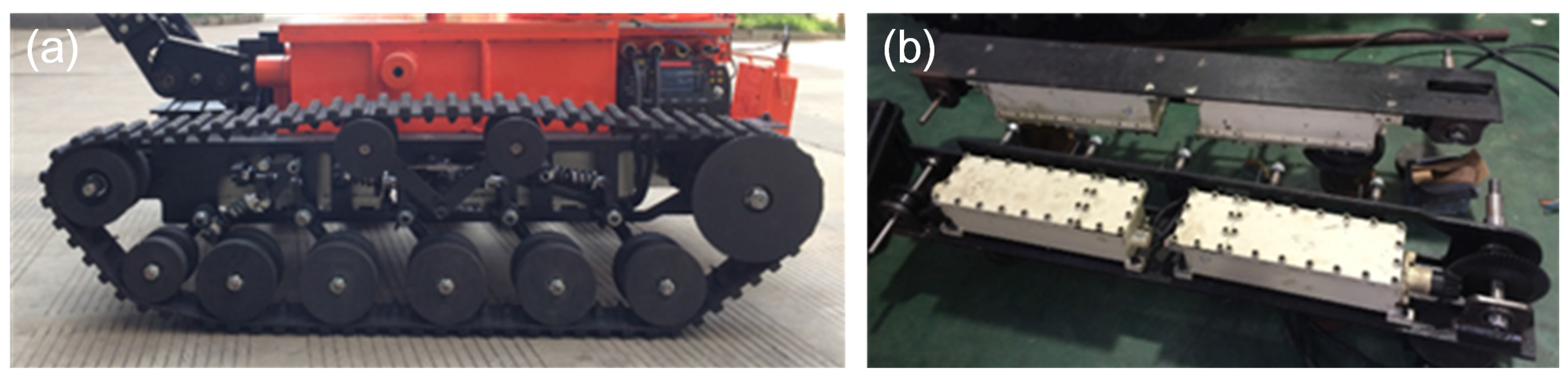
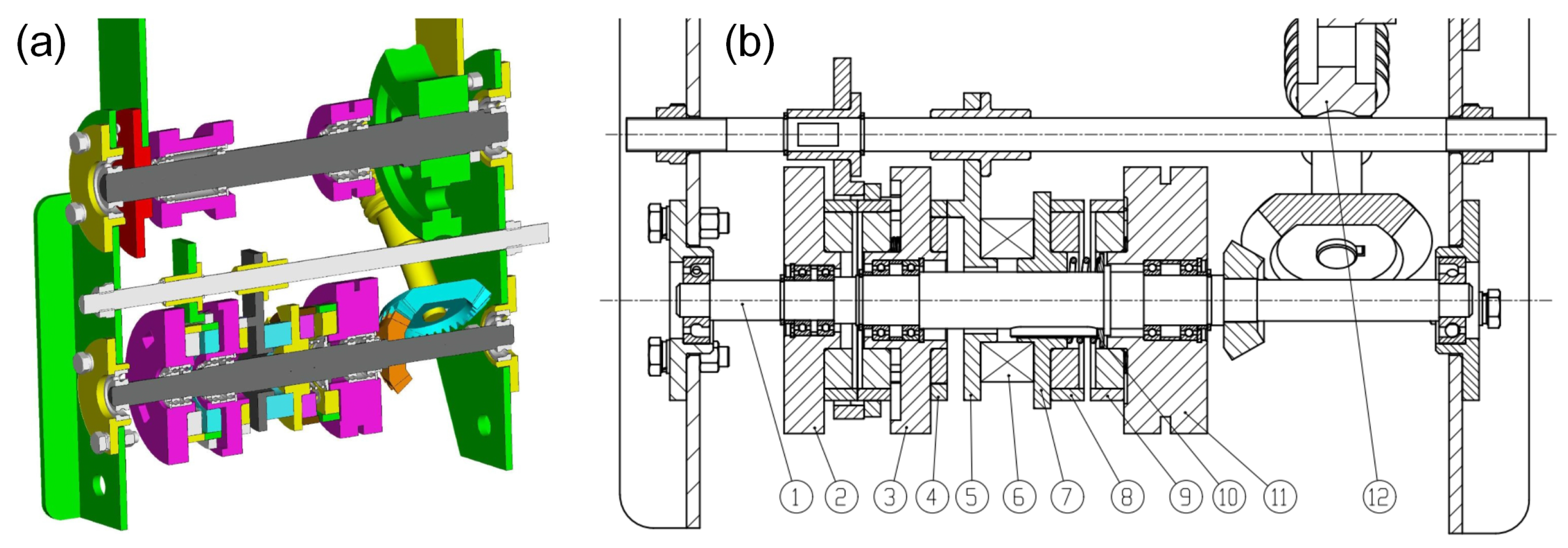
3.3. The Traveling Subassemblies
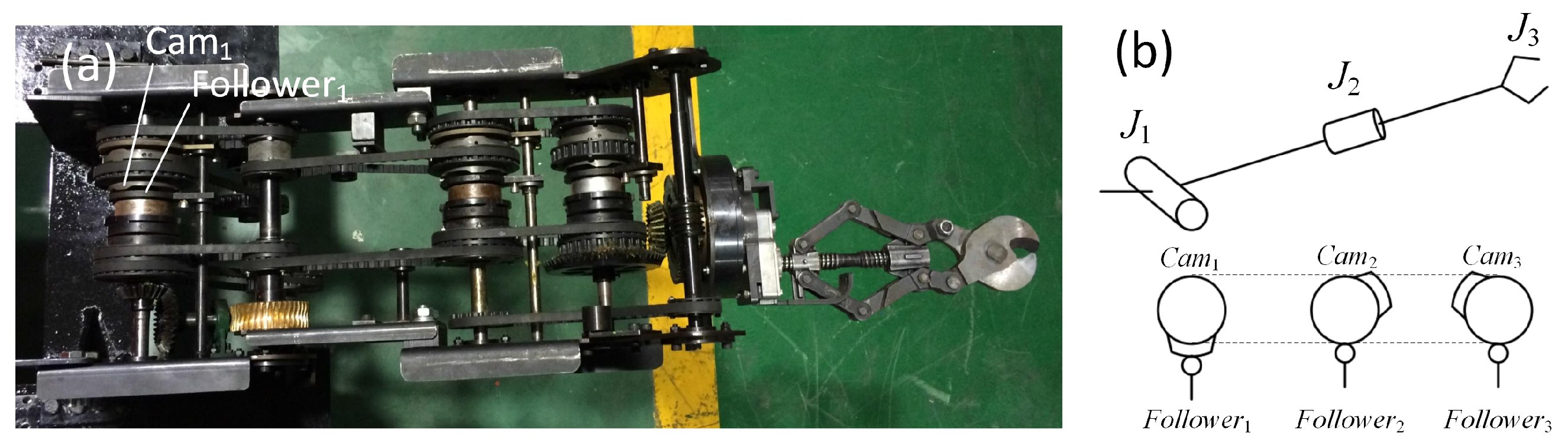
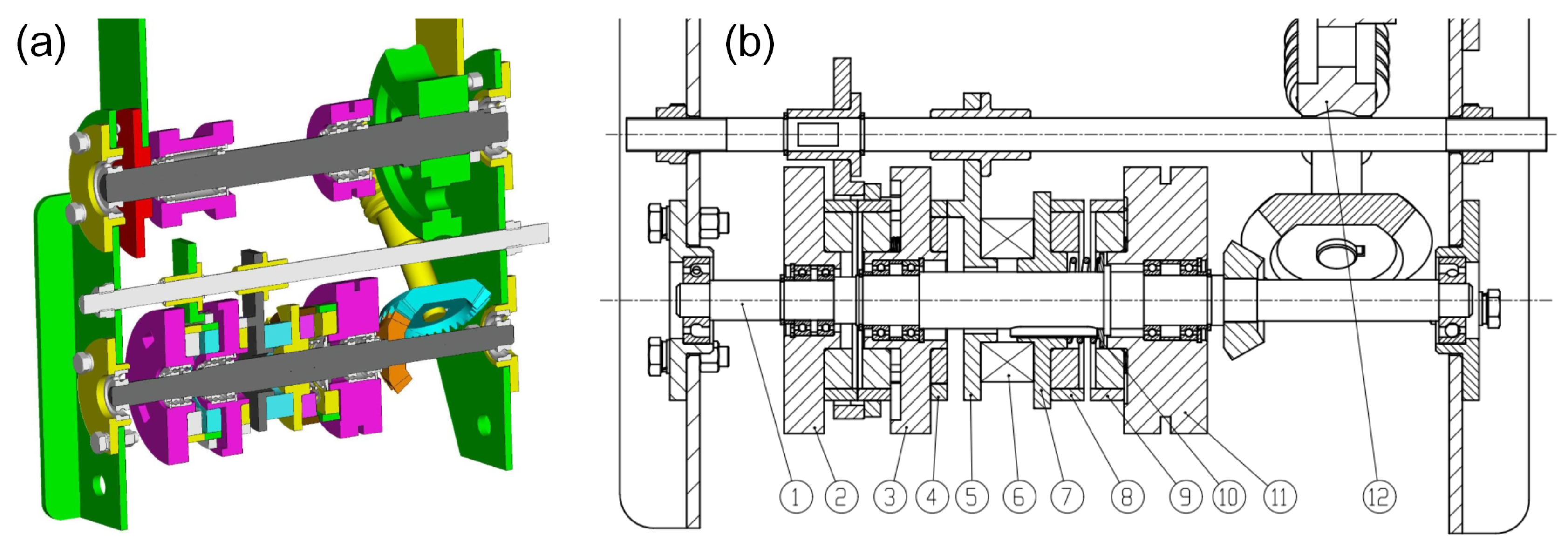
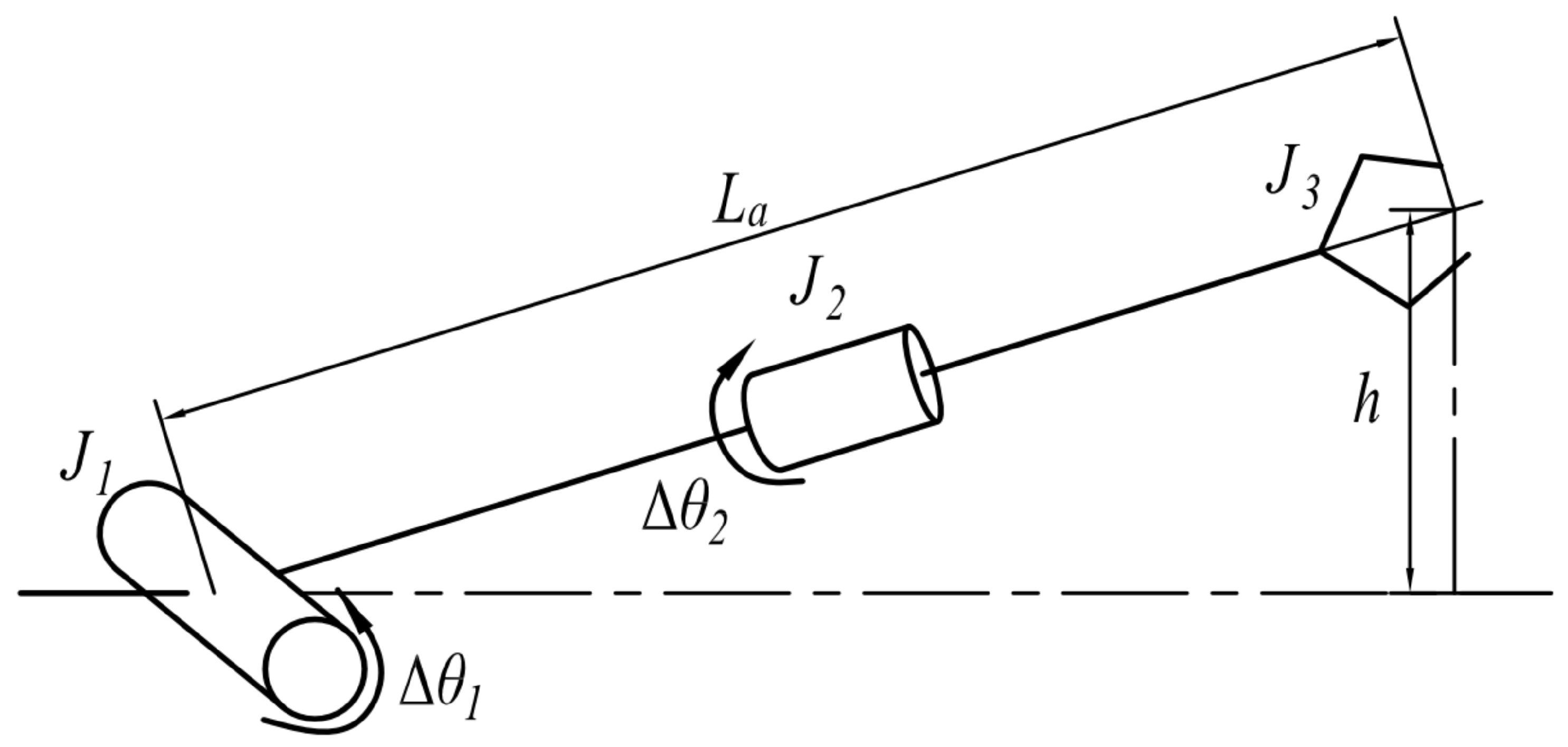
3.4. The Mechanical Manipulator
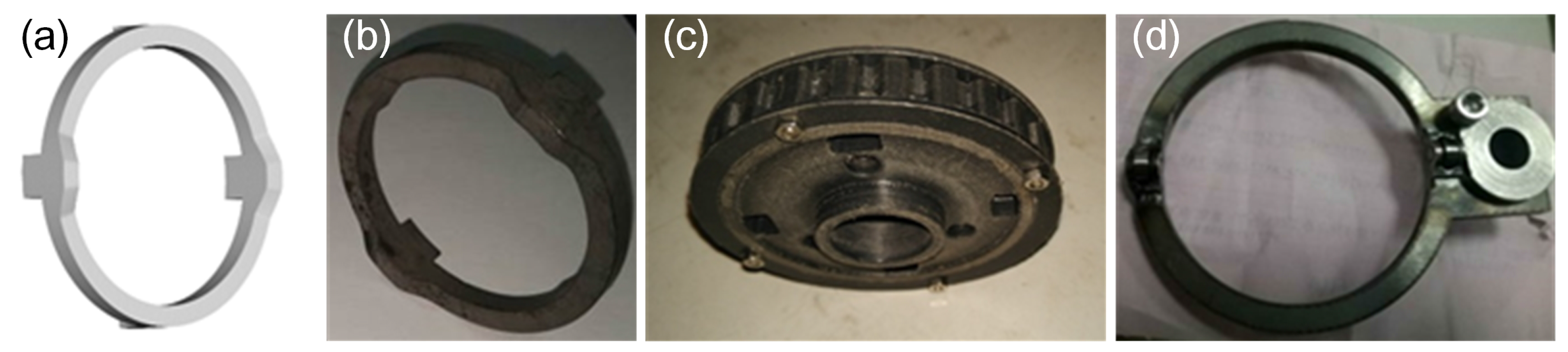
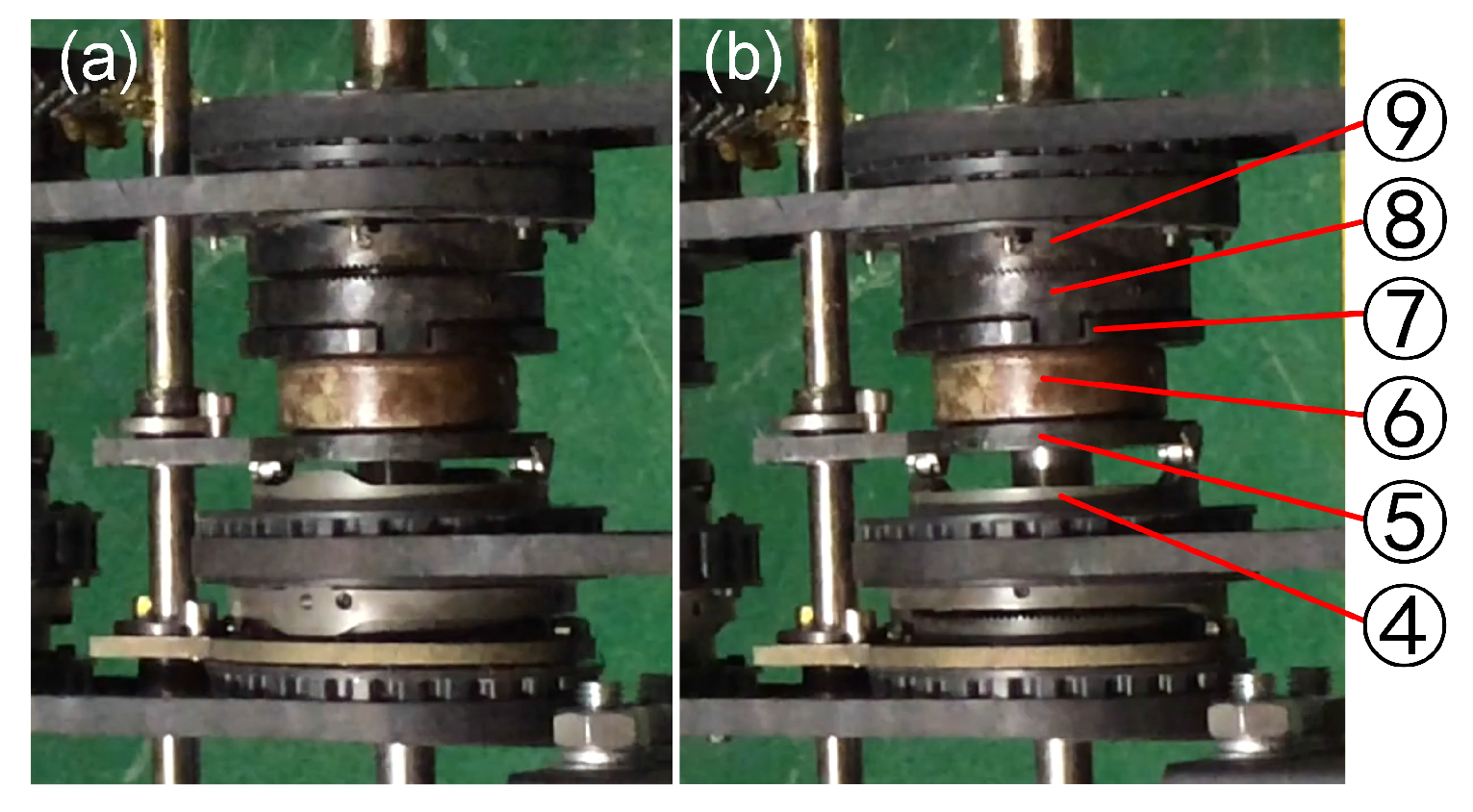
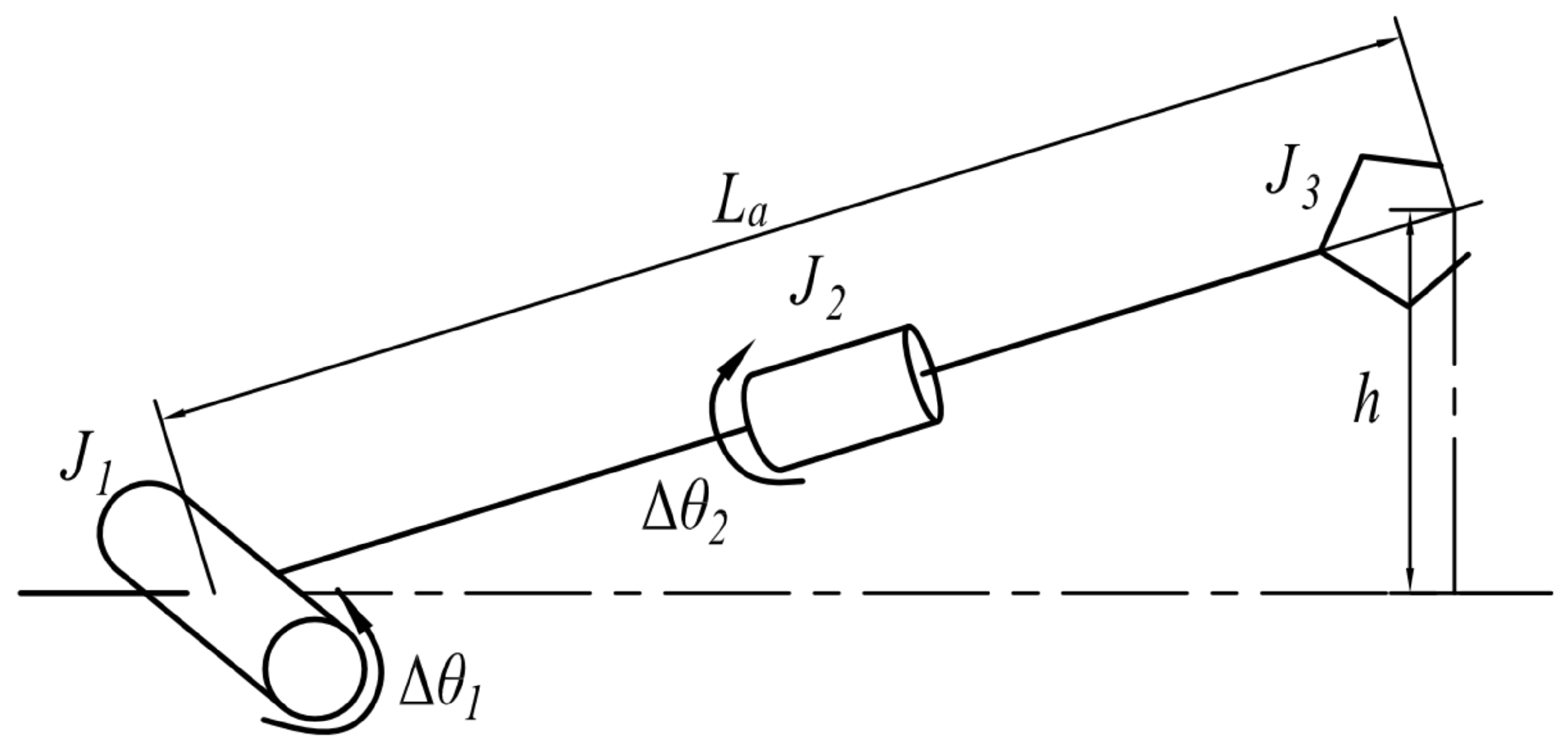
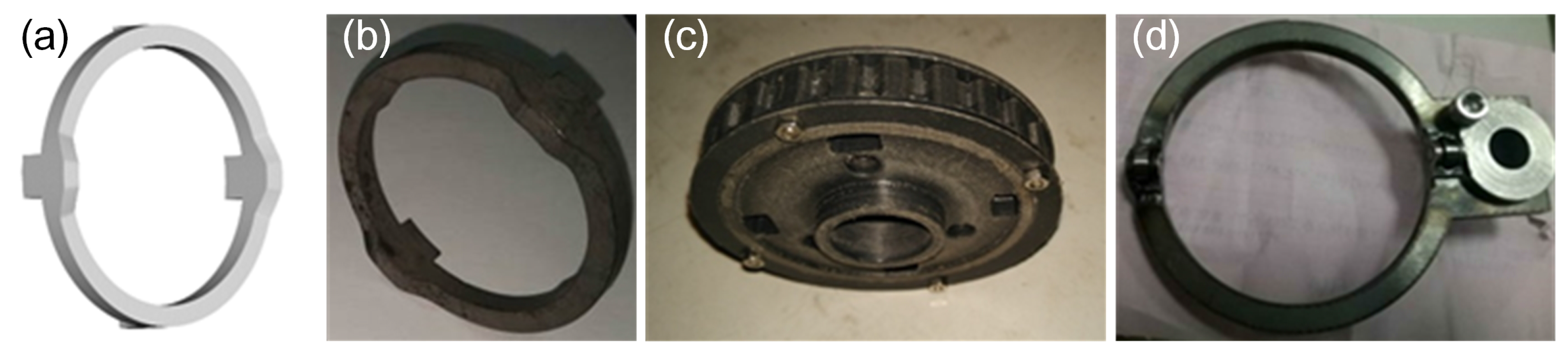
3.4.1. The Shoulder Joint of the Manipulator
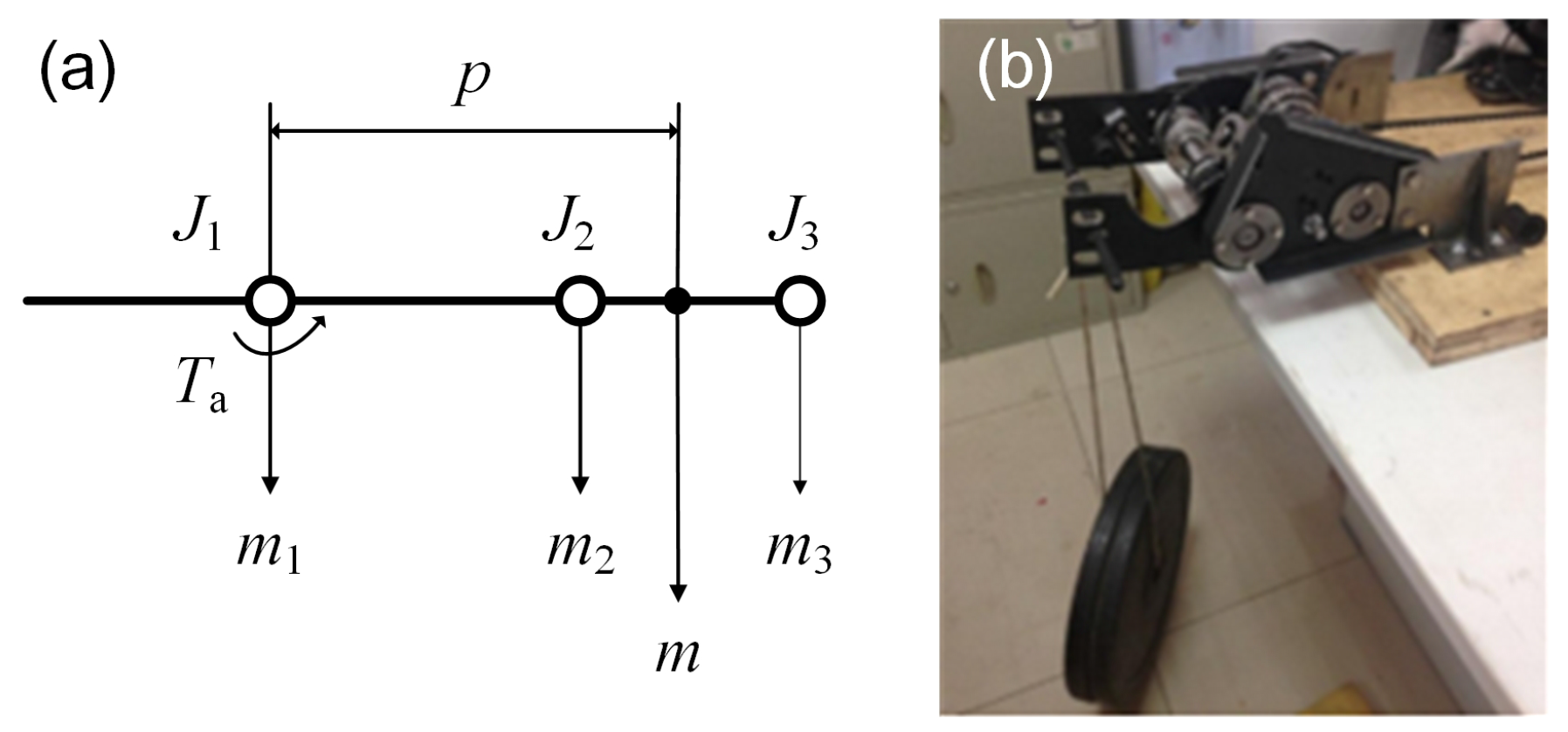
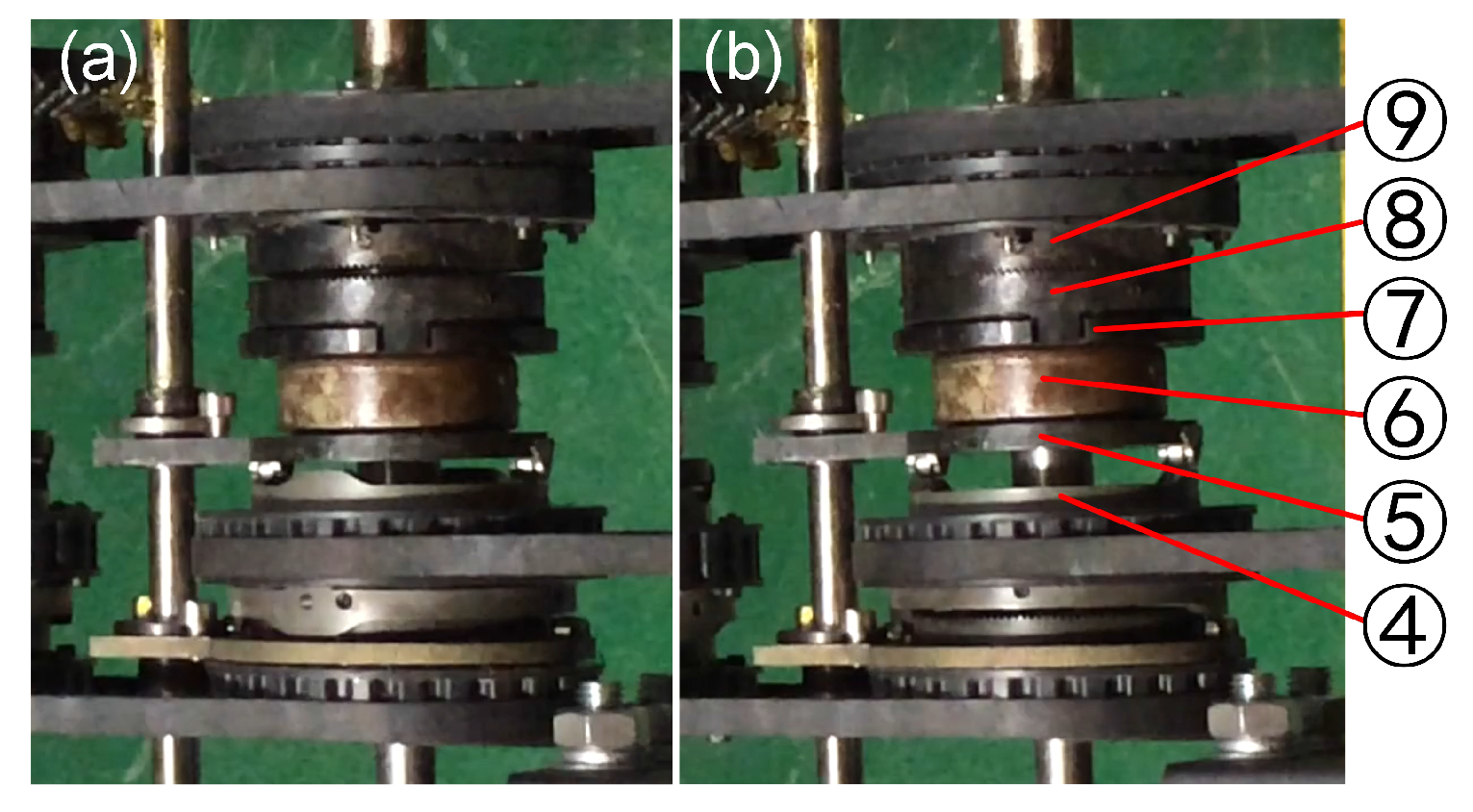
3.4.2. The Wrist Joint of the Manipulator
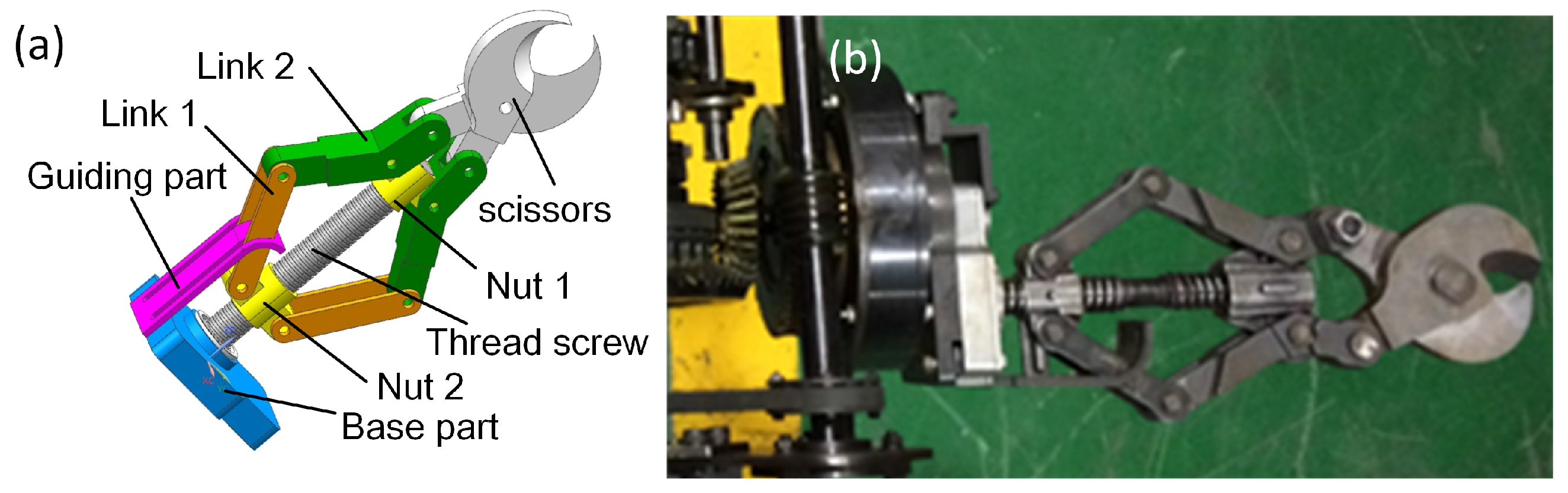
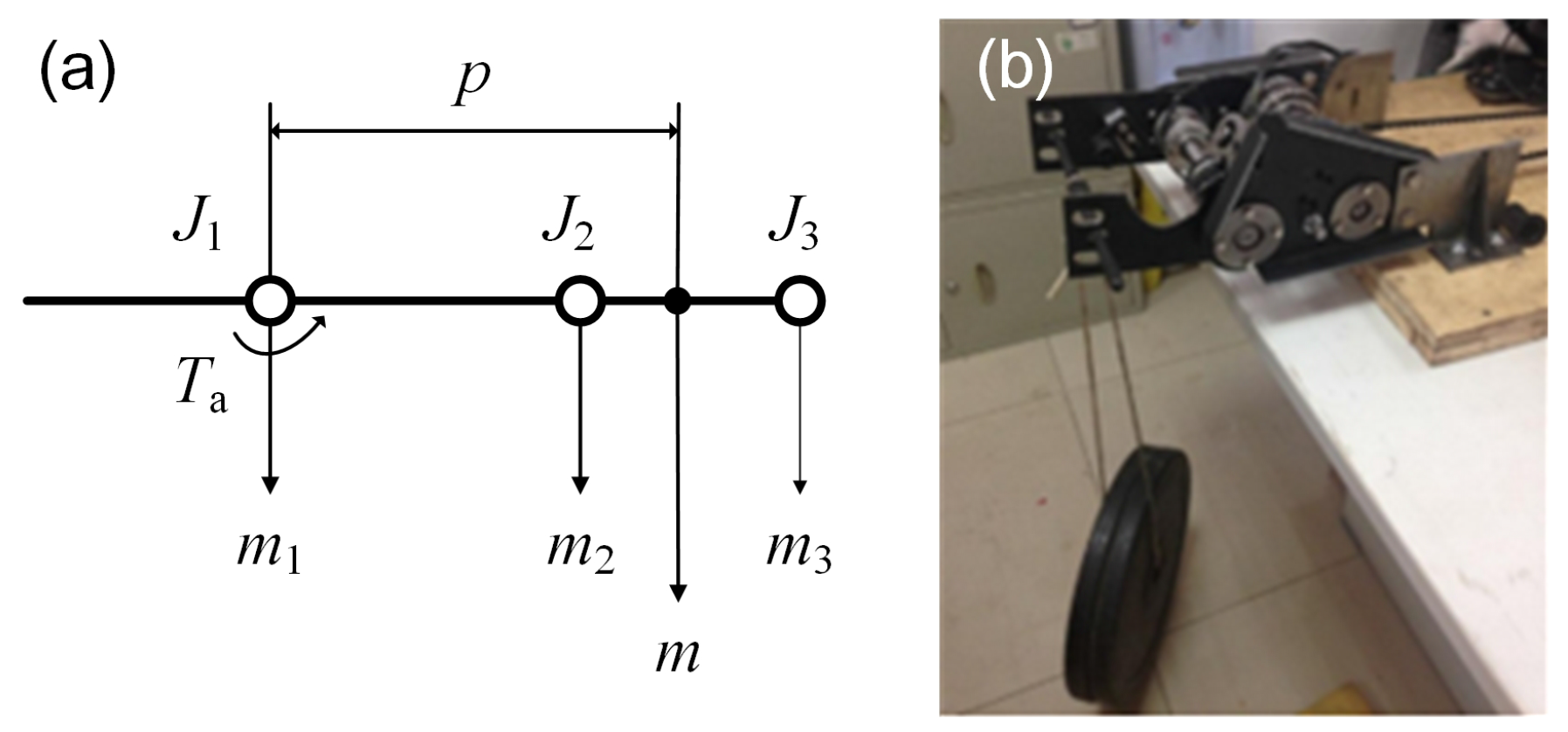
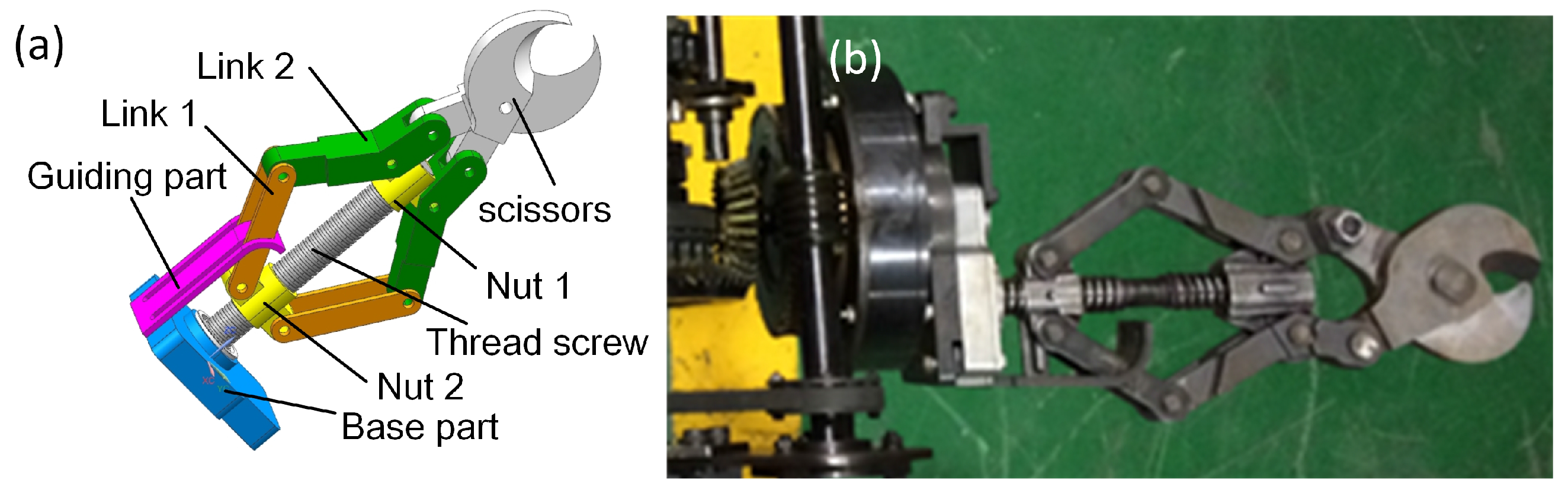
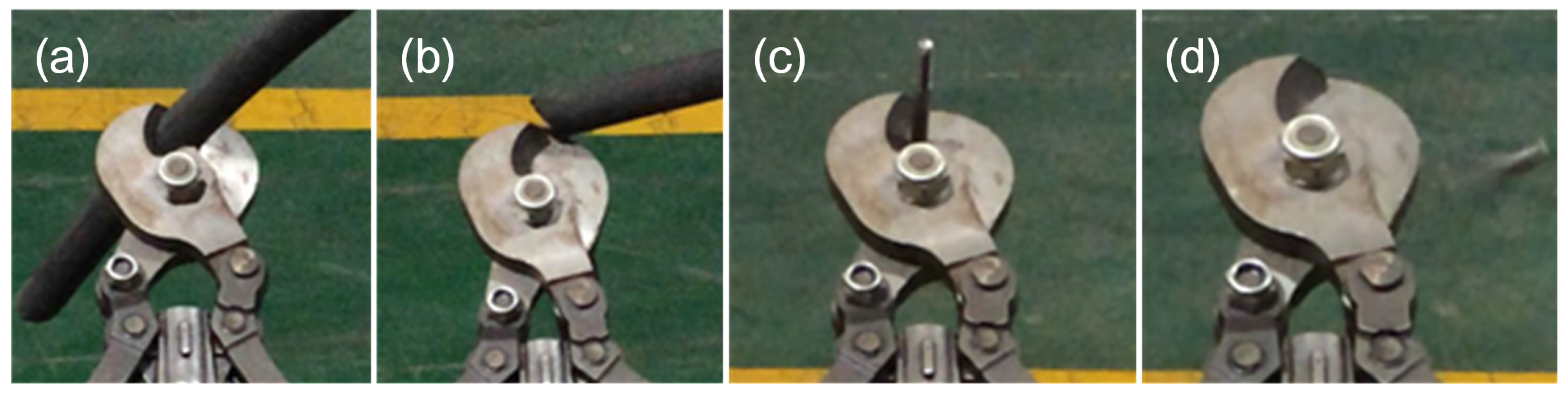
3.4.3. The Scissors of the Manipulator
4. The Explosion-Proof and Waterproof Design for MSRBOTS
4.1. The Explosion-Proof Design for the Robot System
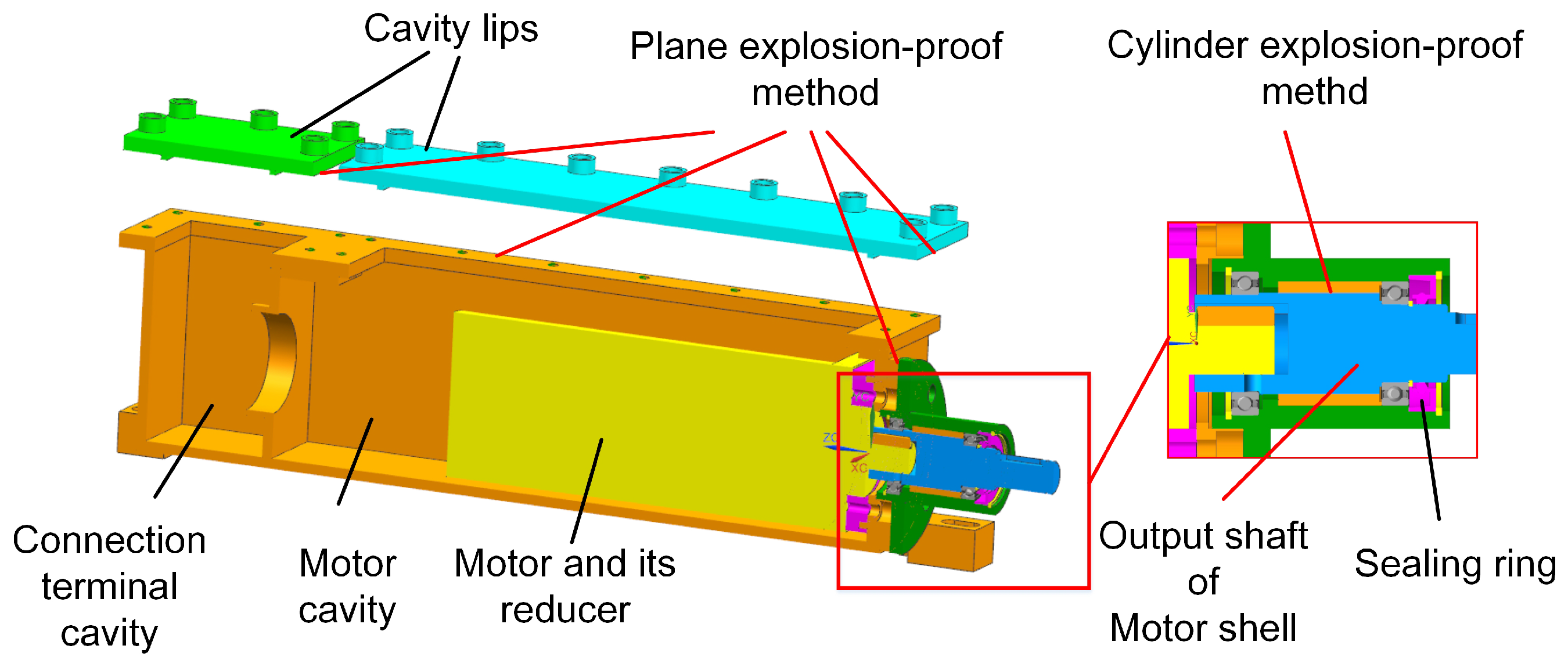
4.1.1. The Explosion-Proof Design of the Mechanical Structure
4.1.2. The Explosion-Proof Design of the Electric System
4.2. The Waterproof Design of the Robot
5. The Control System of MSRBOTS
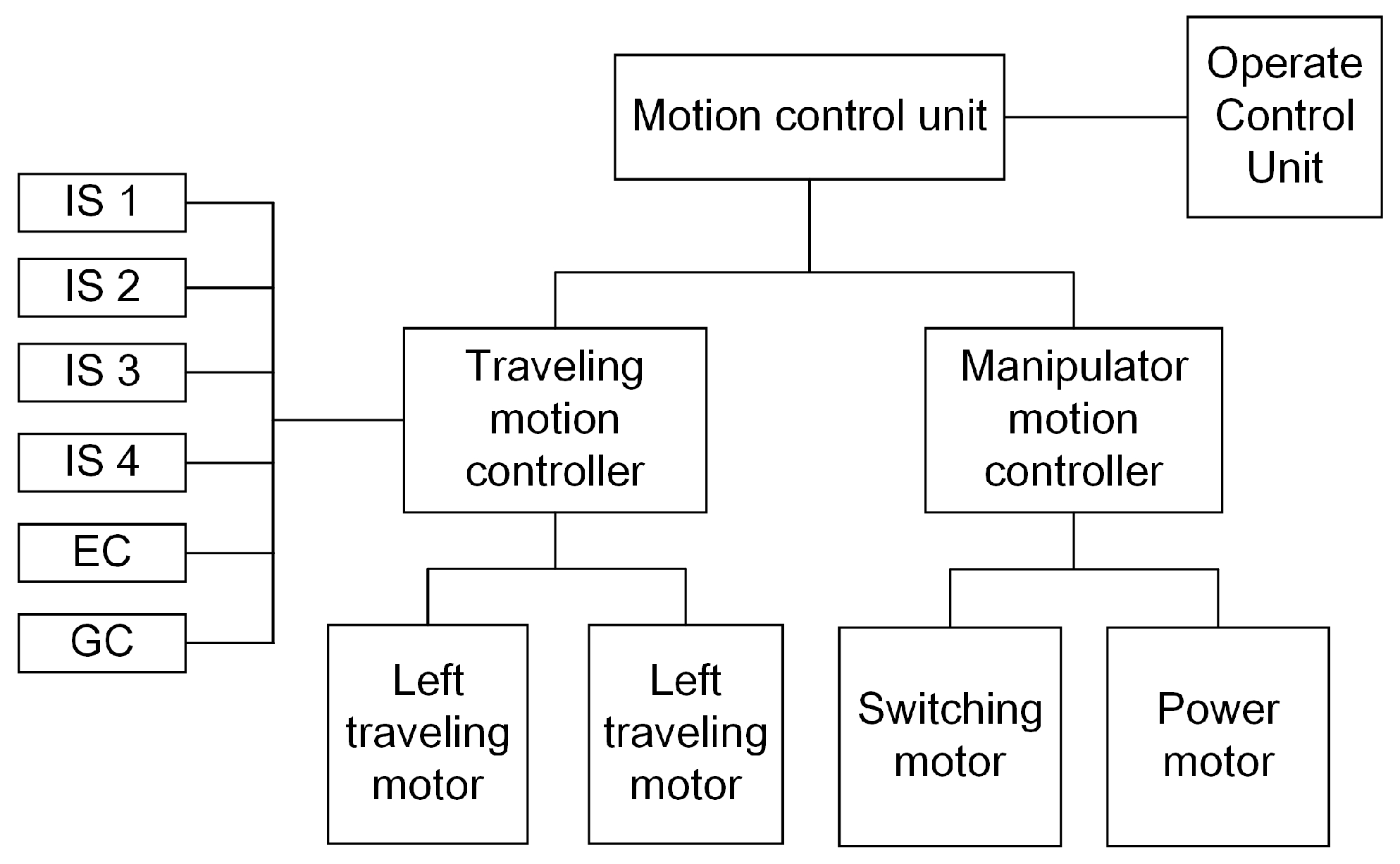
5.1. The Electric System of MSRBOTS
5.2. Human-Interaction
5.2.1. Robot Localization in the Coal Mine
5.2.2. The Manipulator Motion Method
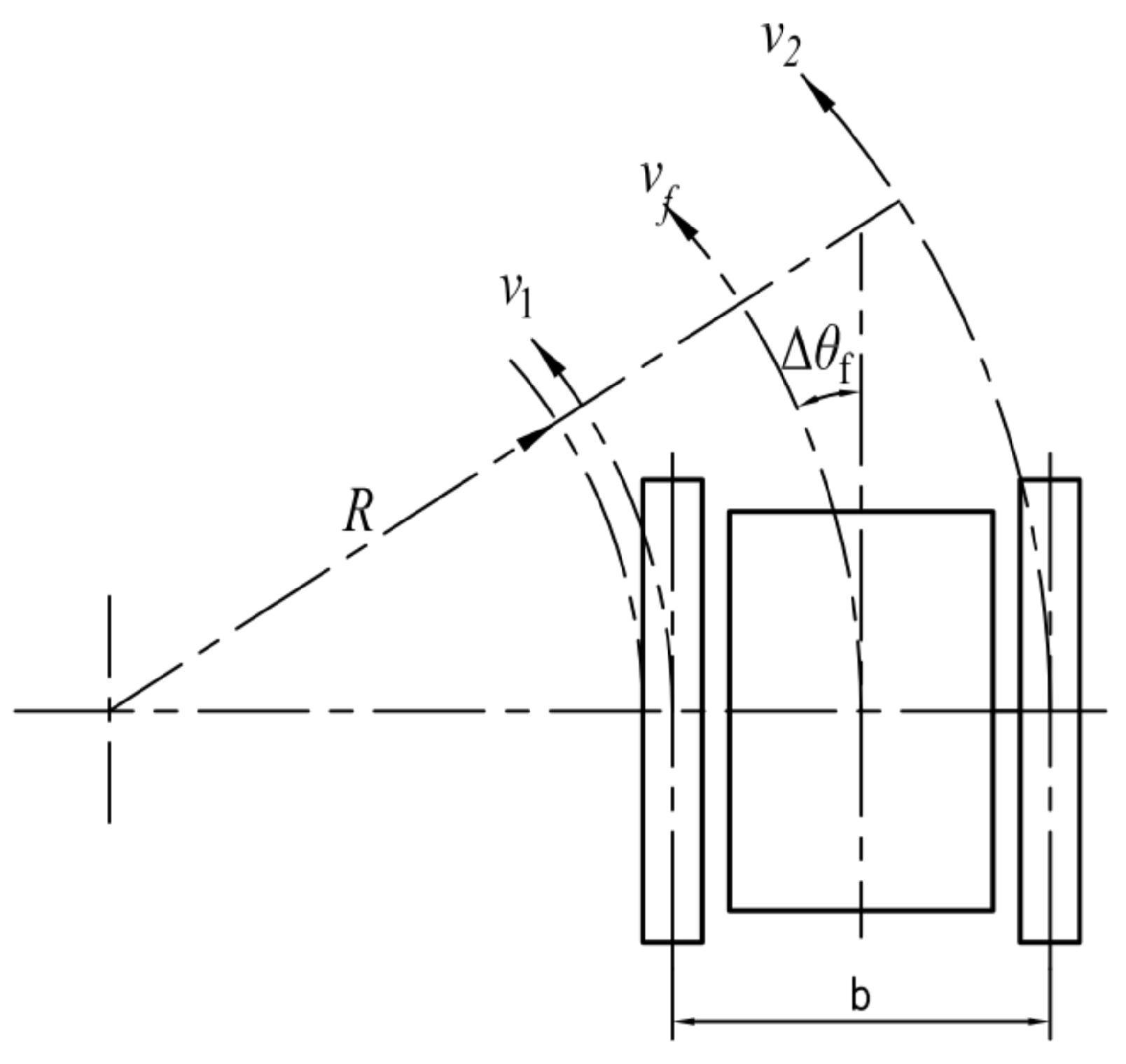
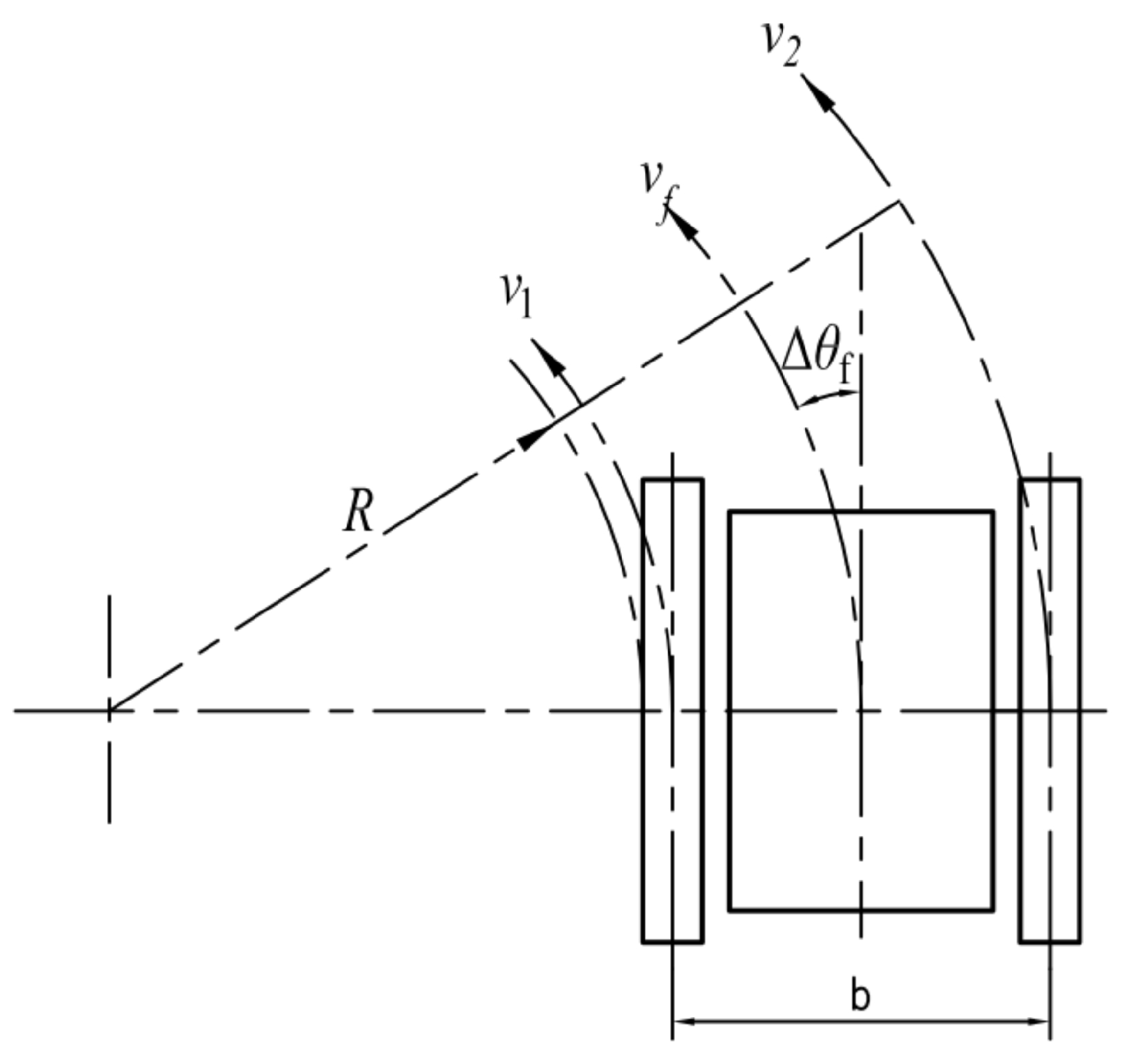
5.2.3. Robot Motion Method
The Telecontrol Mode
The Semiautomatic Control Mode
6. Test and Experiment
6.1. Testing at the Center of National Safety Approval and Certification Center
- (1)
- (2)
- Communication: The communication ability was tested when the robot was under remote telecontrol mode and semi-automatic mode. Including the enforceability and reliability of communication between the robots and OCU. The images, sounds, command messages and environmental information could be transmitted correctly.
- (3)
- Battery supply capacity: All the components of the MSRBOTS are powered by the batteries, so the batteries’ capacity is an important factor. The batteries’ capacity for MSRBOTS is sufficient, and they could still supply the power for the robot system for about 5 h after the robot test for 3 h.
- (4)
- Sensor system: During the test process, the cameras, audio, CD10 and CH lift sensor could keep working in the test room, which was full of CH, safely. In the test, the video and audio worked normally, and the CH lift sensor and CD10 could obtain the gas information and transmit this accurately to the OCU via the communication system.
- (5)
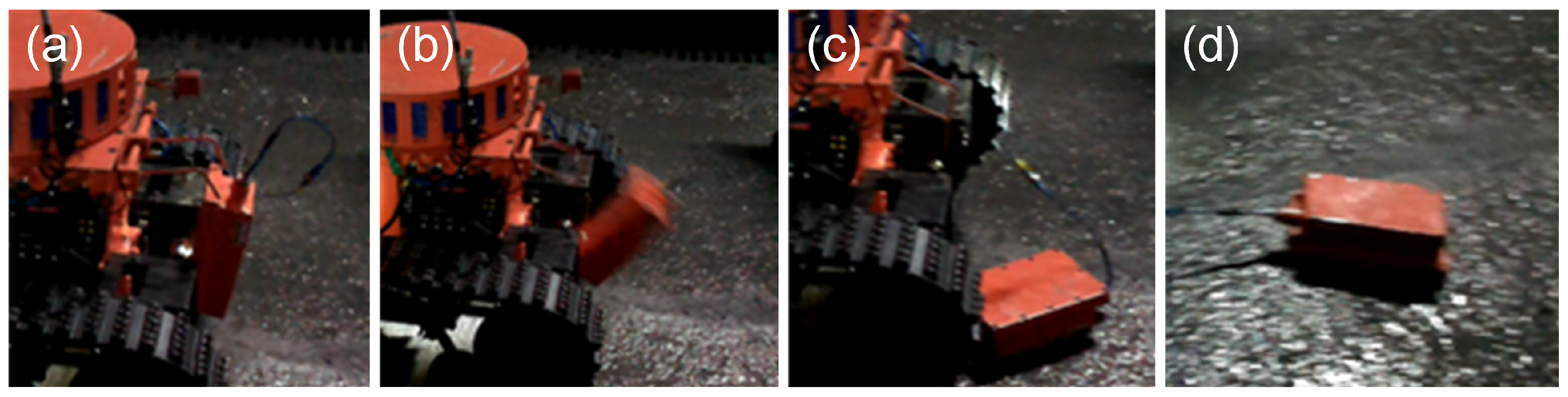
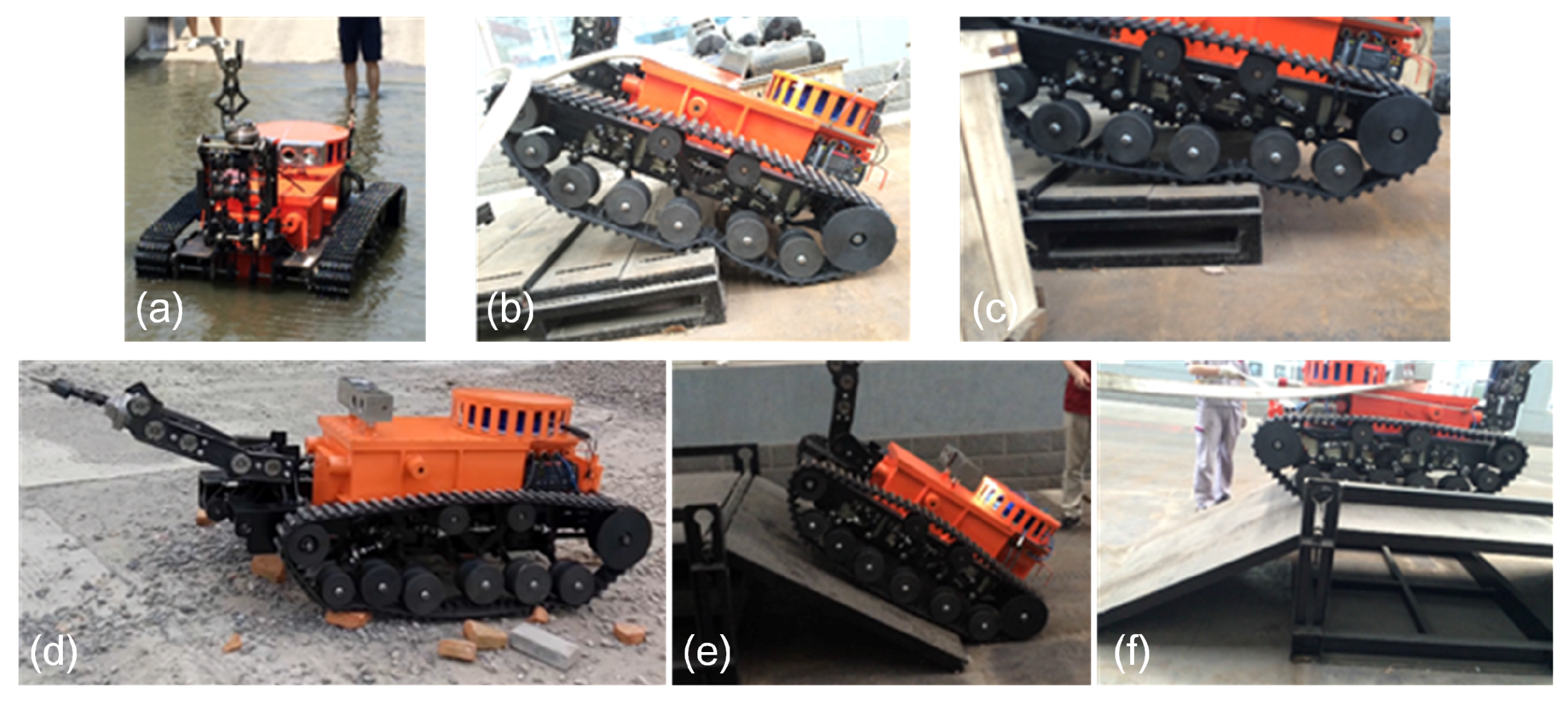
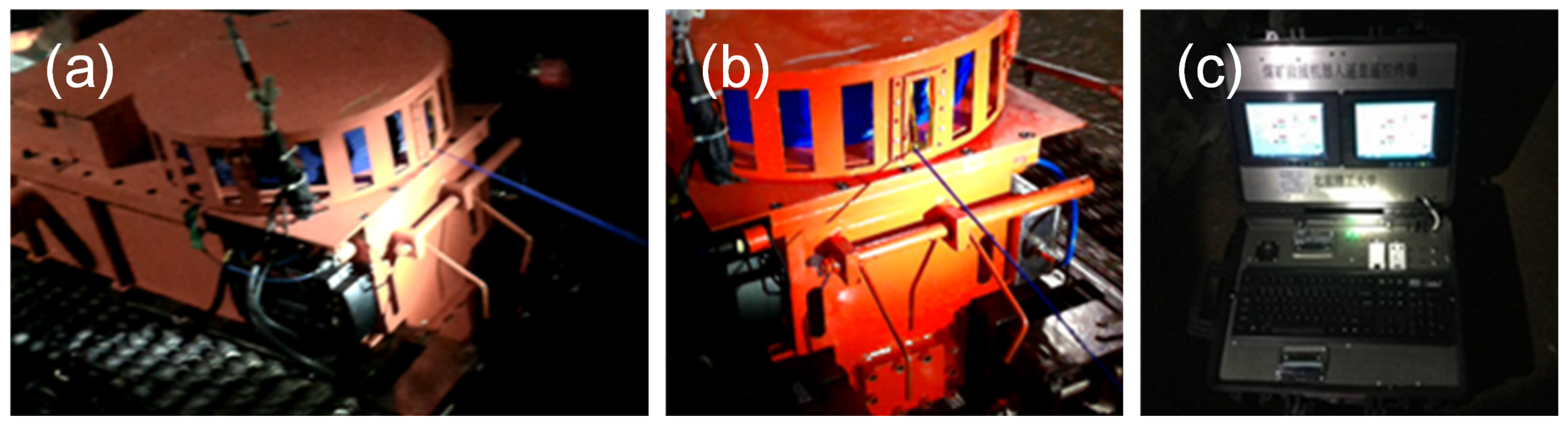
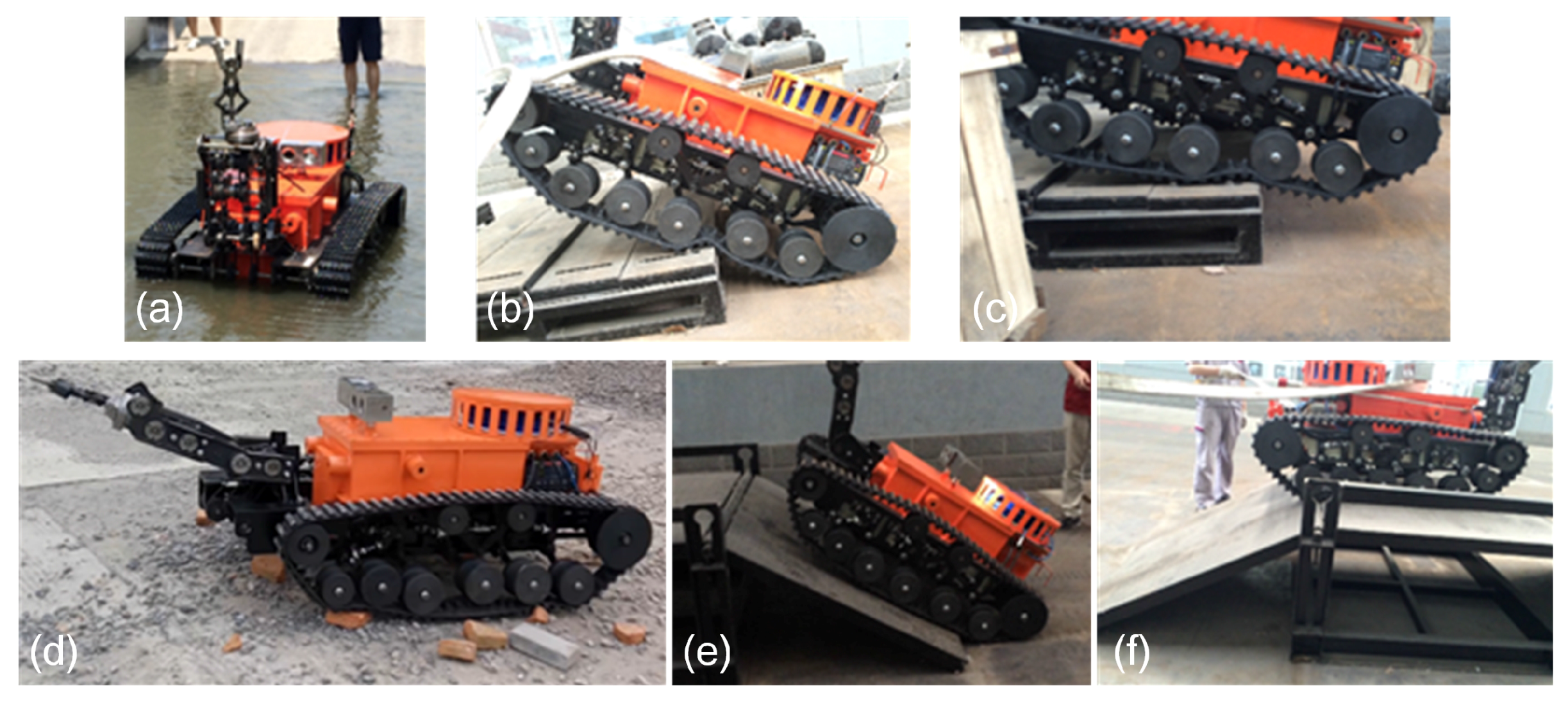
- Explosion-proof and waterproof ability: The robot could work successfully in the coal environment continuously in the test without any accident. The robot electric box and motor shells also passed the explosion test. Therefore the explosion-proof ability of the robot is very reliable. The water-proof ability was tested in a water pool, and the max water depth was about 0.03 m (shown in Figure 26a). The robot electric box and shells of the motors were sealed very well. Even though the sealing surfaces were submerged in water, the robot worked as normal when the robot traveled in the water pool.
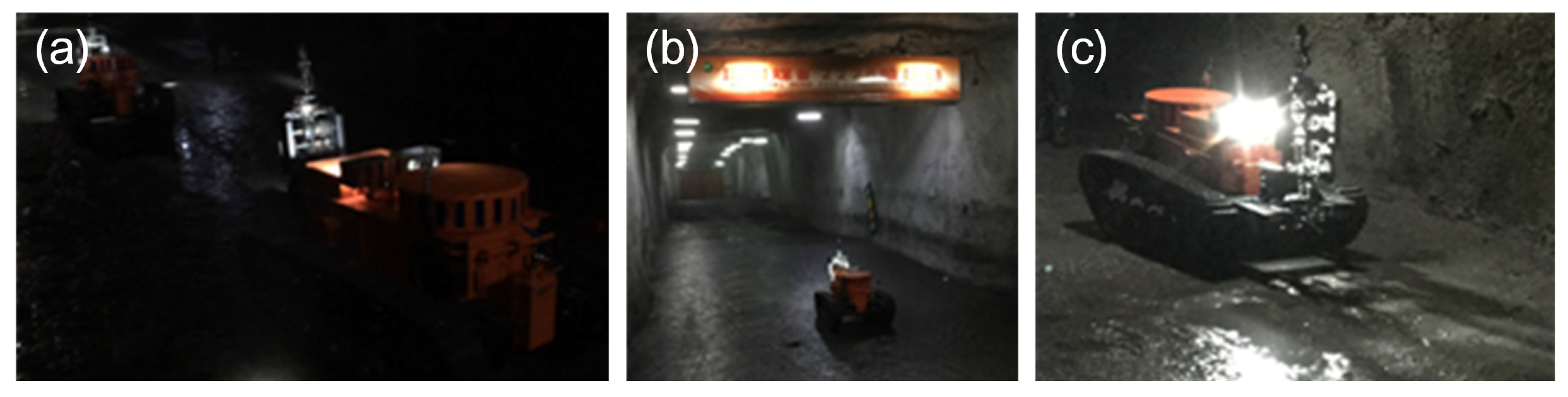
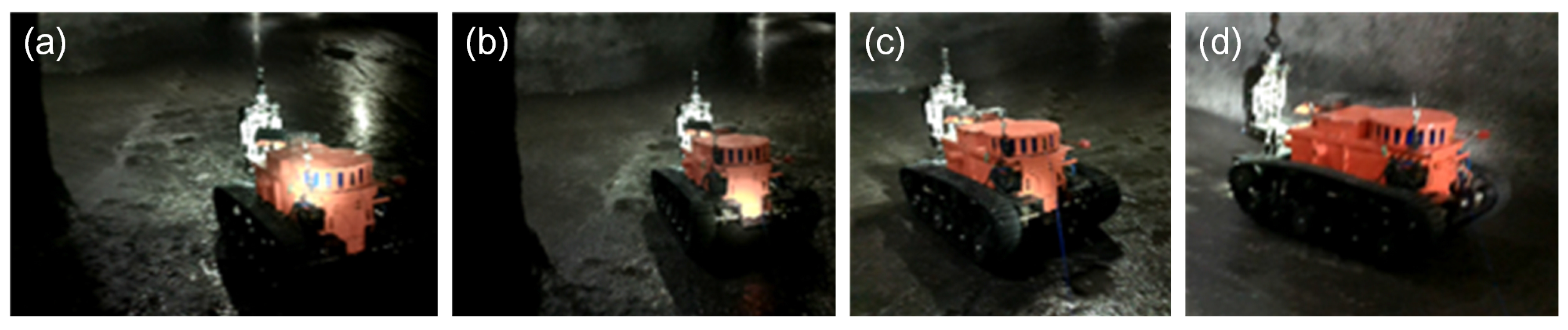
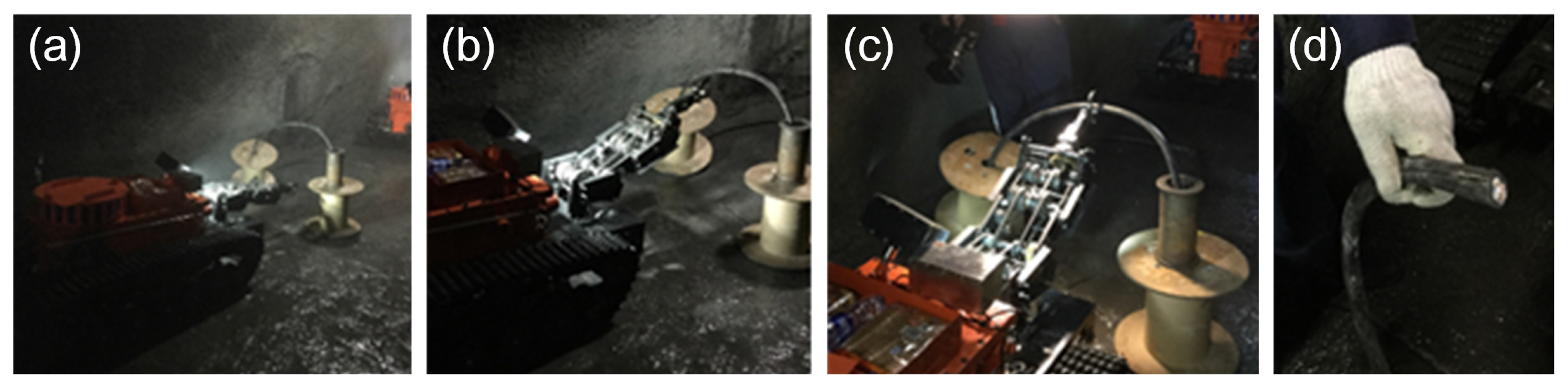
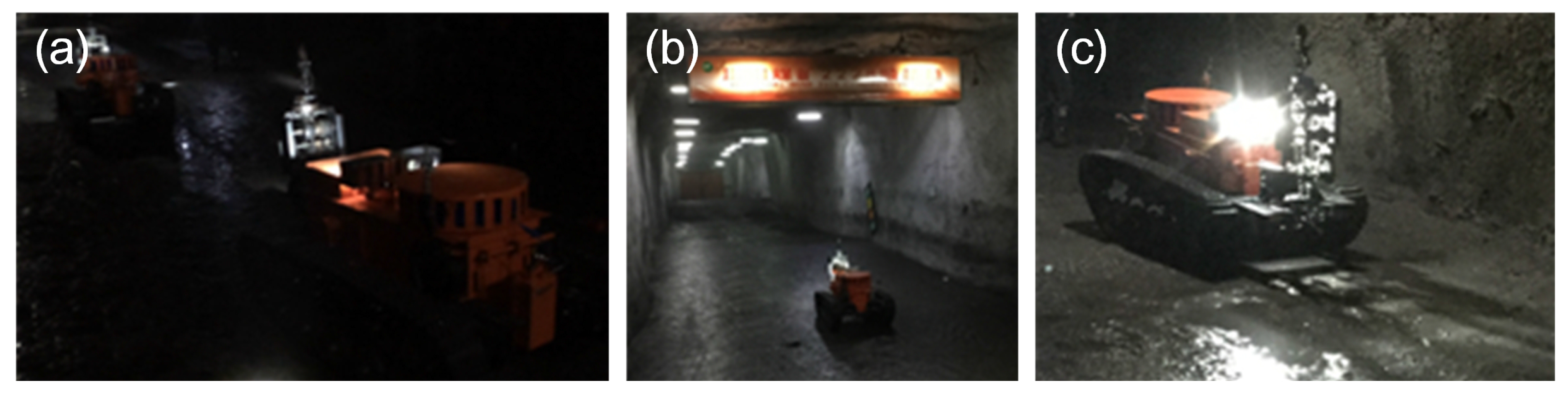
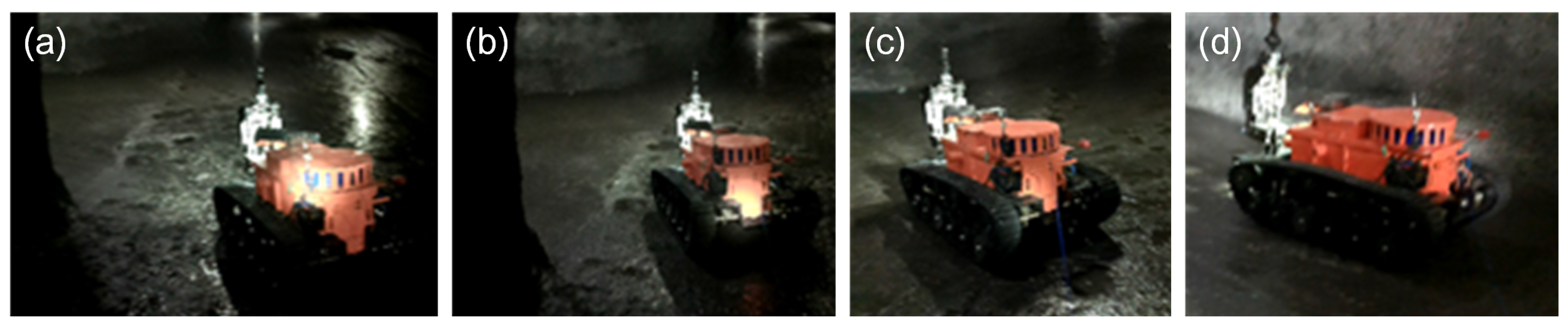
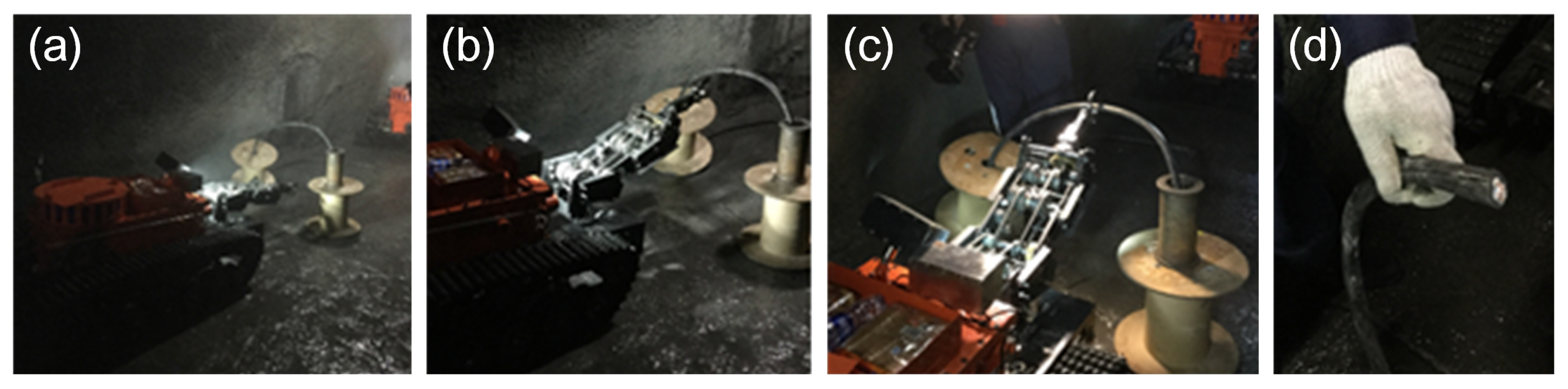
6.2. Experiments in Tashan Coal Mine of Datong Coal Mine Group
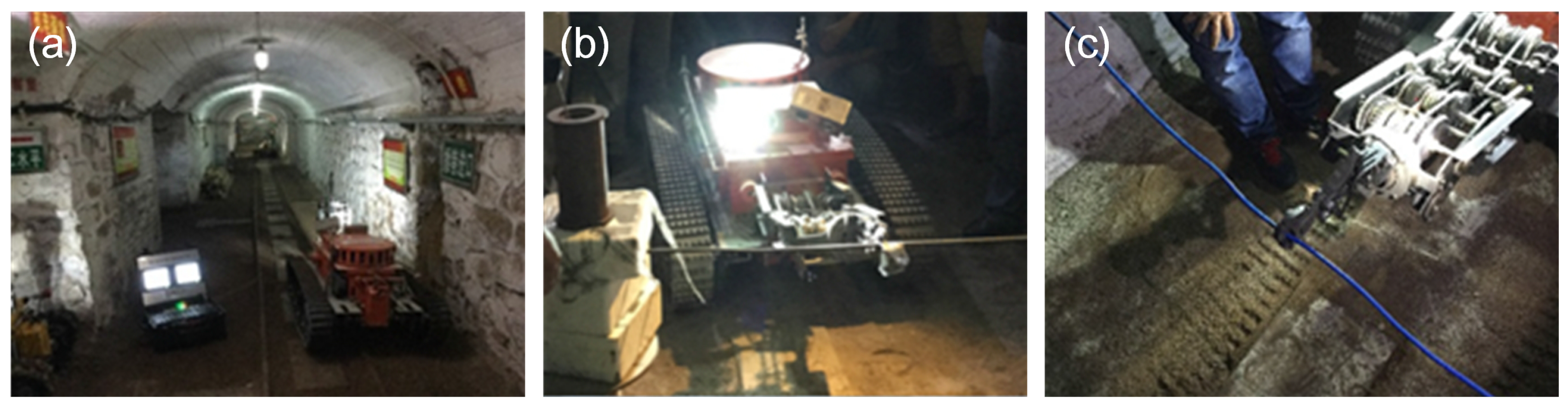
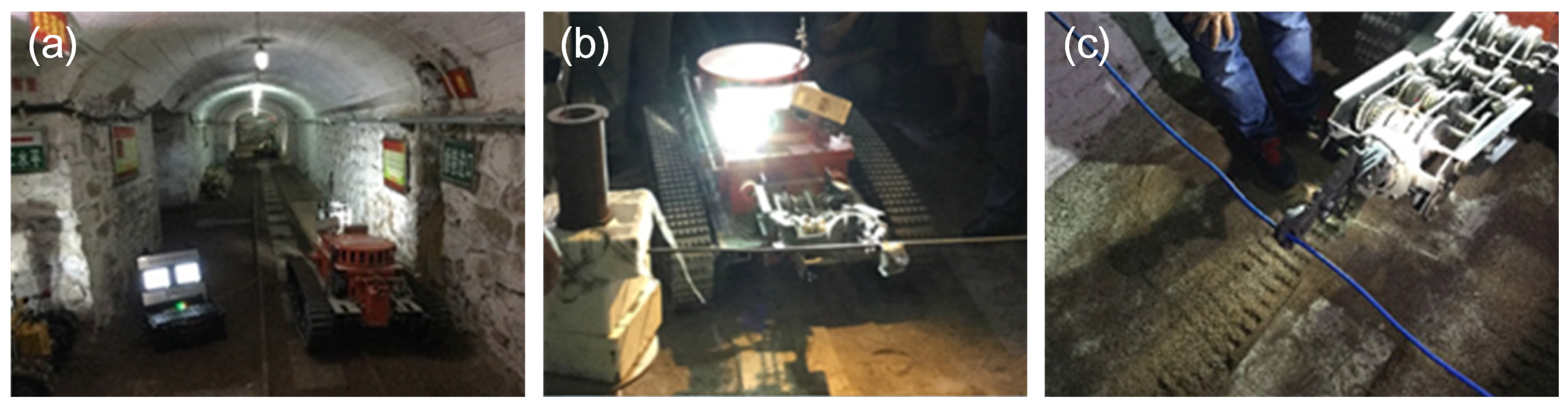
6.3. Training in Rescue Training Scenes of the Datong Brigade of National Mine Emergency Rescue
6.4. Results and Discussion
6.4.1. Testing, Experiments and Training Results
6.4.2. Discussion
7. Conclusions and Future Work
7.1. Conclusions
7.2. Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| OCU | Operating control unit |
| BMS | Battery management system |
| IS | Infrared sensor |
| EC | Electronic compass |
| GY | Gyro |
| Increment height relative to current height | |
| h | The current height of the scissors |
| Shoulder joint | |
| Wrist joint | |
| Scissors joint | |
| The angle by which the power motor needs to rotate | |
| The rotation angle of the wrist joint | |
| The rotation angle of the wrist joint | |
| The length of the manipulator | |
| Shoulder reduction ratio | |
| Wrist reduction ratio | |
| R | The radius of the robot when turning |
| The deflection angle relative to the current traveling direction | |
| The speed of the left traveling subassembly | |
| The speed of the right traveling subassembly | |
| The speed of the robot | |
| b | The distance between the left and right subassemblies |
| Tracks’ displacement | |
| Moving time |
References
- Gao, Y.; Fu, G.; Nieto, A. A comparative study of gas explosion occurrences and causes in China and the United States. Int. J. Min. Reclam. Environ. 2015, 30, 269–278. [Google Scholar] [CrossRef]
- Murphy, R.; Kravitz, J.; Stover, S.; Shoureshi, R. Mobile robots in mine rescue and recovery. IEEE Robot. Autom. Mag. 2009, 16, 91–103. [Google Scholar] [CrossRef]
- Reddy, A.H.; Kalyan, B.; Murthy, C.S. Mine Rescue Robot System—A Review. Procedia Earth Planet. Sci. 2015, 11, 457–462. [Google Scholar] [CrossRef]
- Kasprzyczak, L.; Trenczek, S.; Cader, M. Robot for monitoring hazardous environments as a mechatronic product. J. Autom. Mob. Robot. Intell. Syst. 2012, 6, 57–64. [Google Scholar]
- Kasprzyczak, L.; Szwejkowski, P.; Cader, M. Robotics in mining exemplified by Mobile Inspection Platform. Min. Inform. Autom. Electr. Eng. 2016, 54, 23–28. [Google Scholar]
- Thrun, S.; Hahnel, D.; Ferguson, D.; Montemerlo, M.; Triebel, R.; Burgard, W.; Baker, C.; Omohundro, Z.; Thayer, S.; Whittaker, W. A System for Volumetric Robotic Mapping of Abandoned Mines. In Proceedings of the 2003 IEEE international Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 4270–4275. [Google Scholar]
- Sandia National Laboratories. News Releases: Sandia Labs’ Gemini-Scout Robot Likely to Reach Trapped Miners Ahead of Rescuers; Sandia National Laboratories: Livermore, CA, USA, 2015. [Google Scholar]
- Wang, W.; Dong, W.; Su, Y.; Wu, D.; Du, Z. Development of Search-and-rescue Robots for Underground Coal Mine Applications. J. Field Robot. 2014, 31, 386–407. [Google Scholar] [CrossRef]
- Moczulski, W.; Cyran, K.; Januszka, M.; Novak, P.; Timofiejczuk, A. Telerescuer-an innovative robotized system for supporting mining rescuers by inspecting roadways affected by catastrophes. In Proceedings of the 24th World Mining Congress–Automation and Robotics, Rio de Janeiro, Brazil, 10 October 2016; pp. 93–103. [Google Scholar]
- Yu-tan, L.; Hua, Z.; Meng-Gang, L.; Peng, L. A novel explosion-proof walking system: Twin dual-motor drive tracked units for coal mine rescue robots. J. Cent. South Univ. 2016, 23, 2570–2577. [Google Scholar]
- Tao, W.; Ou, Y.; Feng, H. Research on Dynamics and Stability in the Stairs-climbing of a Tracked Mobile Robot. Int. J. Adv. Robot. Syst. 2012, 9, 146. [Google Scholar] [CrossRef]
- Wolf, A.; Choset, H.H.; Brown, B.H.; Casciola, R.W. Design and control of a mobile hyper-redundant urban search and rescue robot. Adv. Robot. 2005, 19, 221–248. [Google Scholar] [CrossRef]
- Kasprzyczak, L.; Pietrzak, R. Electromagnetic Compatibility Tests of Mining Mobile Inspection Robot. Arch. Min. Sci. 2014, 59, 427–439. [Google Scholar]
- Yarkan, S.; Guzelgoz, S.; Arslan, H.; Murphy, R. Underground Mine Communications: A Survey. IEEE Commun. Surv. Tutor. 2009, 11, 125–142. [Google Scholar] [CrossRef]
- Dohare, Y.S.; Maity, T.; Das, P.S.; Paul, P.S. Wireless Communication and Environment Monitoring in Underground Coal Mines—Review. Iete Tech. Rev. 2015, 32, 140–150. [Google Scholar] [CrossRef]
- Bhattacharjee, S.; Roy, P.; Ghosh, S.; Misra, S.; Obaidat, M.S. Wireless sensor network-based fire detection, alarming, monitoring and prevention system for Bord-and-Pillar coal mines. J. Syst. Softw. 2012, 85, 571–581. [Google Scholar] [CrossRef]
- Raghuram, P.; Venkatesh, V. Enhancing Mine Safety With Wireless Sensor Networks Using ZigBee Technology. J. Theor. Appl. Inf. Technol. 2012, 37, 261–267. [Google Scholar]
- Hussain, I.; Cawood, F.; van Olst, R. Effect of tunnel geometry and antenna parameters on through-the-air communication systems in underground mines: Survey and open research areas. Phys. Commun. 2017, 23, 84–94. [Google Scholar] [CrossRef]
- Xu, Z.; Yang, W.; You, K.; Li, W.; Kim, Y.I. Vehicle autonomous localization in local area of coal mine tunnel based on vision sensors and ultrasonic sensors. PLoS ONE 2017, 12, e0171012. [Google Scholar] [CrossRef] [PubMed]
- Xiong, C.; Han, D.; Xiong, Y. An integrated localization system for robots in underground environments. Ind. Robot Int. J. 2009, 36, 221–229. [Google Scholar] [CrossRef]
- Du, Y.; Tong, M.; Zhou, L.; Dong, H. Edge detection based on Retinex theory and wavelet multiscale product for mine images. Appl. Opt. 2016, 55, 9625–9637. [Google Scholar] [CrossRef] [PubMed]
- Ralston, J.C.; Hainsworth, D.W.; Reid, D.C.; Anderson, D.L.; McPhee, R.J. Recent advances in remote coal mining machine sensing, guidance, and teleoperation. Robotica 2001, 19, 513–526. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | MSRBOTS | MINBOT II |
|---|---|---|
| Robot Body Sizes | 1.315 × 0.536 × 0.862 m | 0.82 × 0.589 × 0.747 m |
| Manipulator Length | 0.664 m | No manipulator |
| Robot Mass | 430 kg | 130 kg |
| Environment Information | CH4, CO2 CO, O2, H2S, SO2, temperature, humidity, wind speed, air pressure | CH4, CO2, CO, O2, temperature, humidity |
| Audio | Two-way audio | Two-way audio |
| Video | Two cameras | Two cameras |
| OCU | 0.5 × 0.4 × 0.25 m, 20 kg | No data |
| Items | Values | Units | Items | Values | Units |
|---|---|---|---|---|---|
| 7.5 | kg | p | 0.361 | m | |
| 7.5 | kg | 112.5 | Nm | ||
| 5.5 | kg | −20∼90 | ° | ||
| m | 20.5 | kg |
| Items | MSRBOTS | MINBOT II | Units |
|---|---|---|---|
| Height of vertical obstacle | 0.15 | 0.5 | m |
| Continuous steps | 0.12 × 0.4 | no data | m |
| Climbing angle | 26 | no data | ° |
| Wading depth | 0.3 | no data | m |
| Ditch width | 0.4 | 0.6 | m |
| Communication distance | 2000 | 1000 | m |
| Power supply time | 5 | no data | h |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Gao, J.; Zhao, F.; Liu, Y. A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment. Sensors 2017, 17, 2426. https://doi.org/10.3390/s17102426
Zhao J, Gao J, Zhao F, Liu Y. A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment. Sensors. 2017; 17(10):2426. https://doi.org/10.3390/s17102426
Chicago/Turabian StyleZhao, Jingchao, Junyao Gao, Fangzhou Zhao, and Yi Liu. 2017. "A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment" Sensors 17, no. 10: 2426. https://doi.org/10.3390/s17102426