
Two-UAV Intersection Localization System Based on the Airborne Optoelectronic Platform

Abstract
:1. Introduction
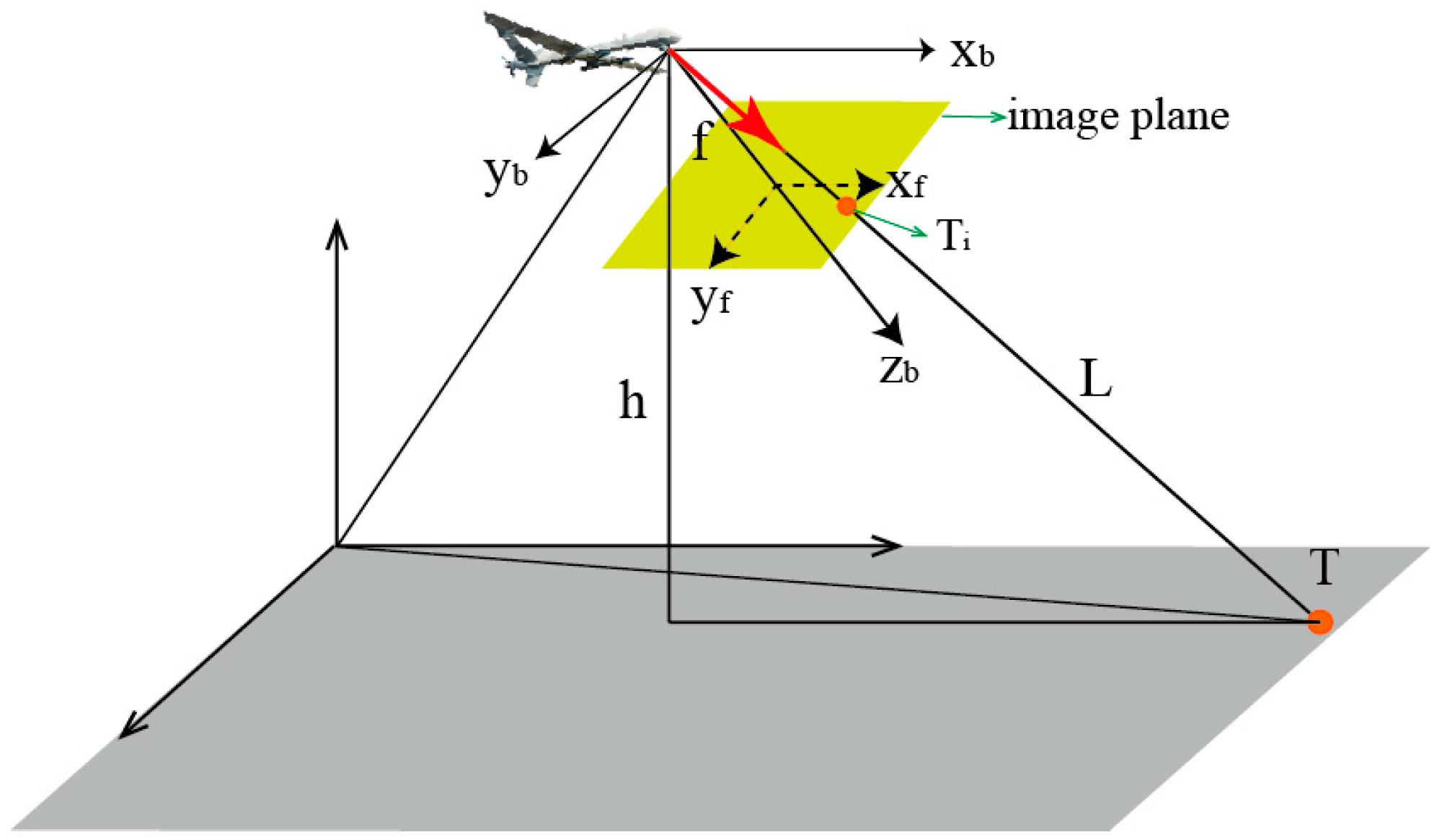
2. Introduction of the Traditional Single-Station REA Localization Method
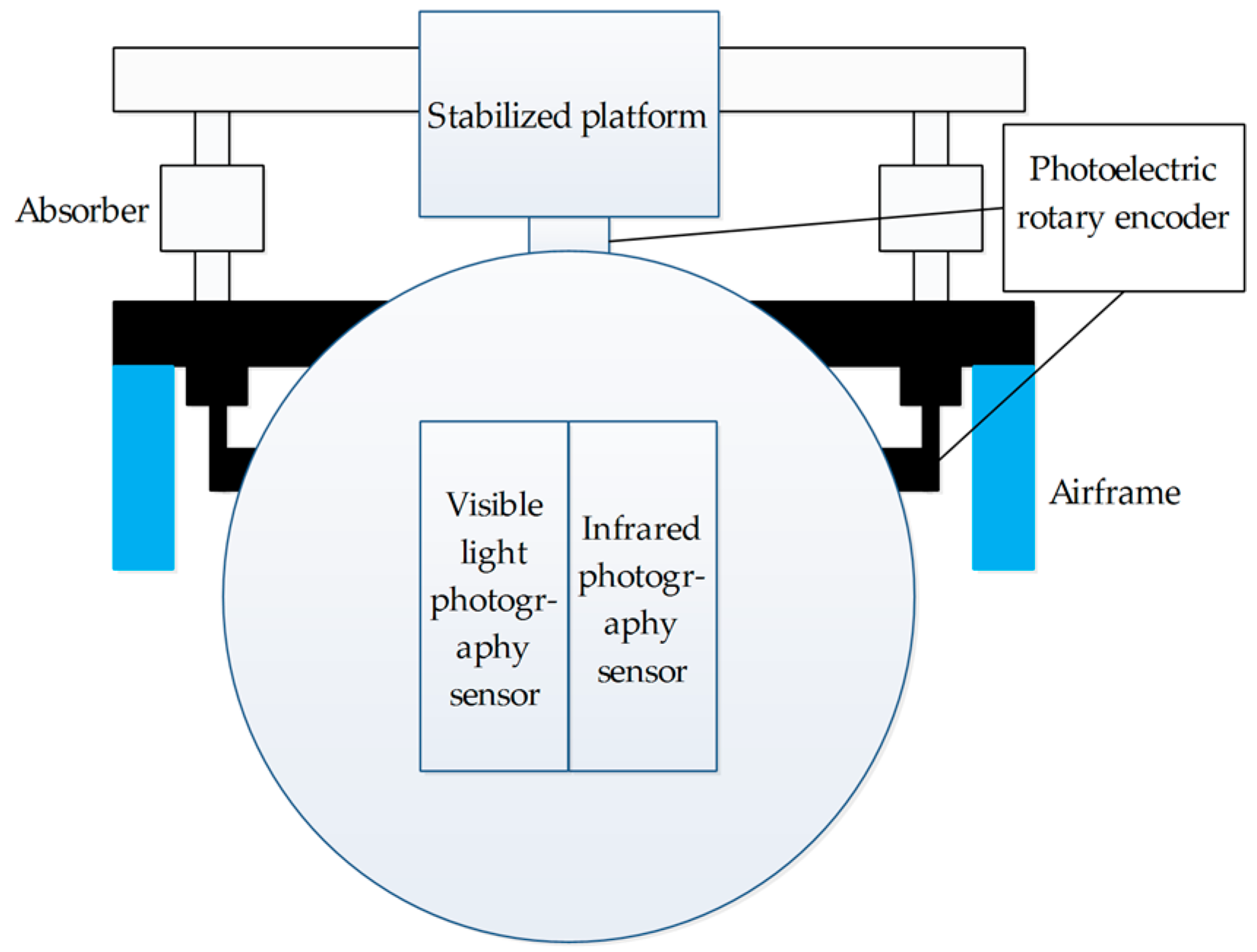
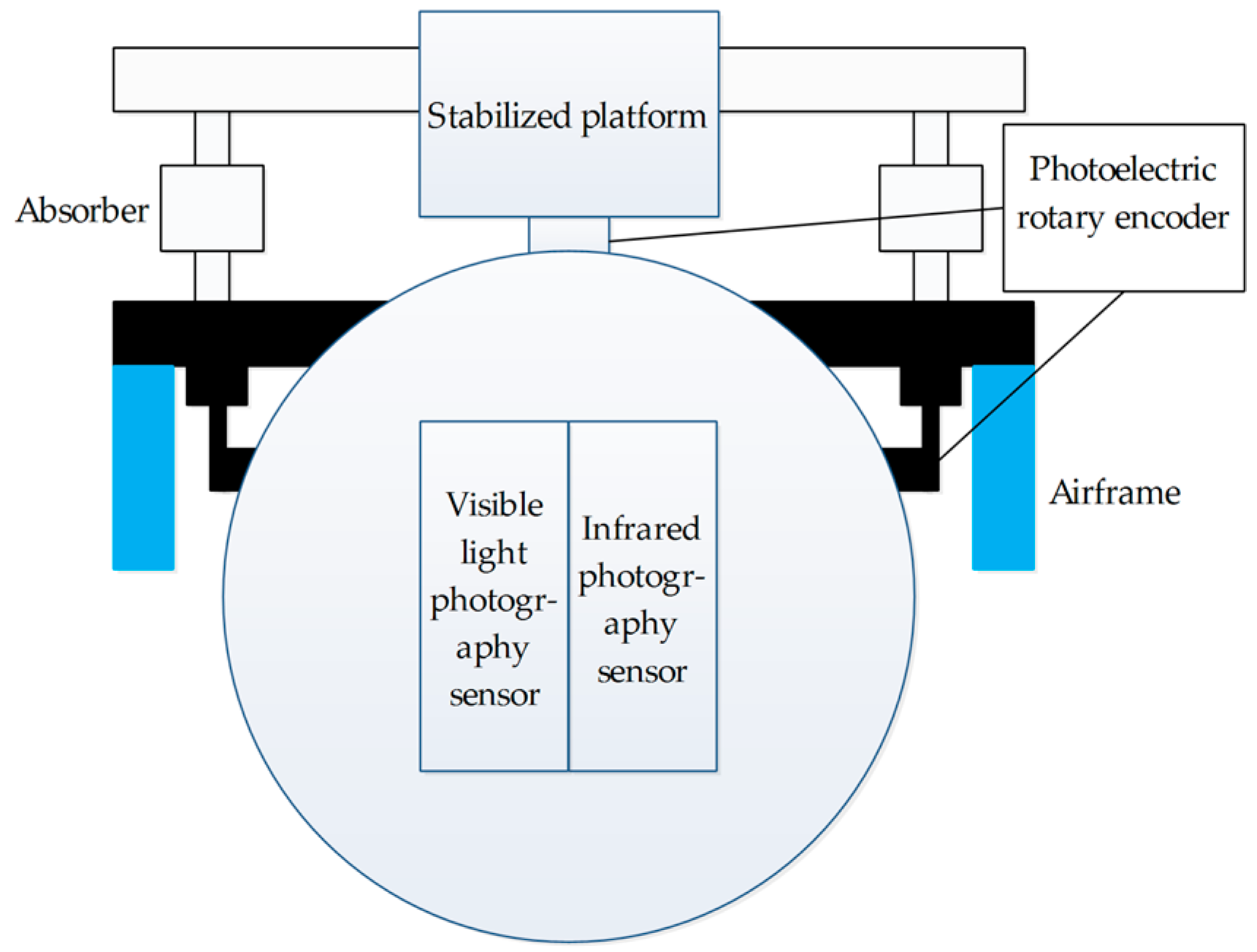
3. Makeup and Operating Principle of Two-UAV Intersection Localization System
4. Key Technologies of Two-UAV Intersection Localization System
4.1. Establishment of Space Coordinates
- Geodetic coordinate system : based on international terrestrial reference system WGS-84. The position of any spatial point is expressed by longitude, latitude, and geodetic height [24].
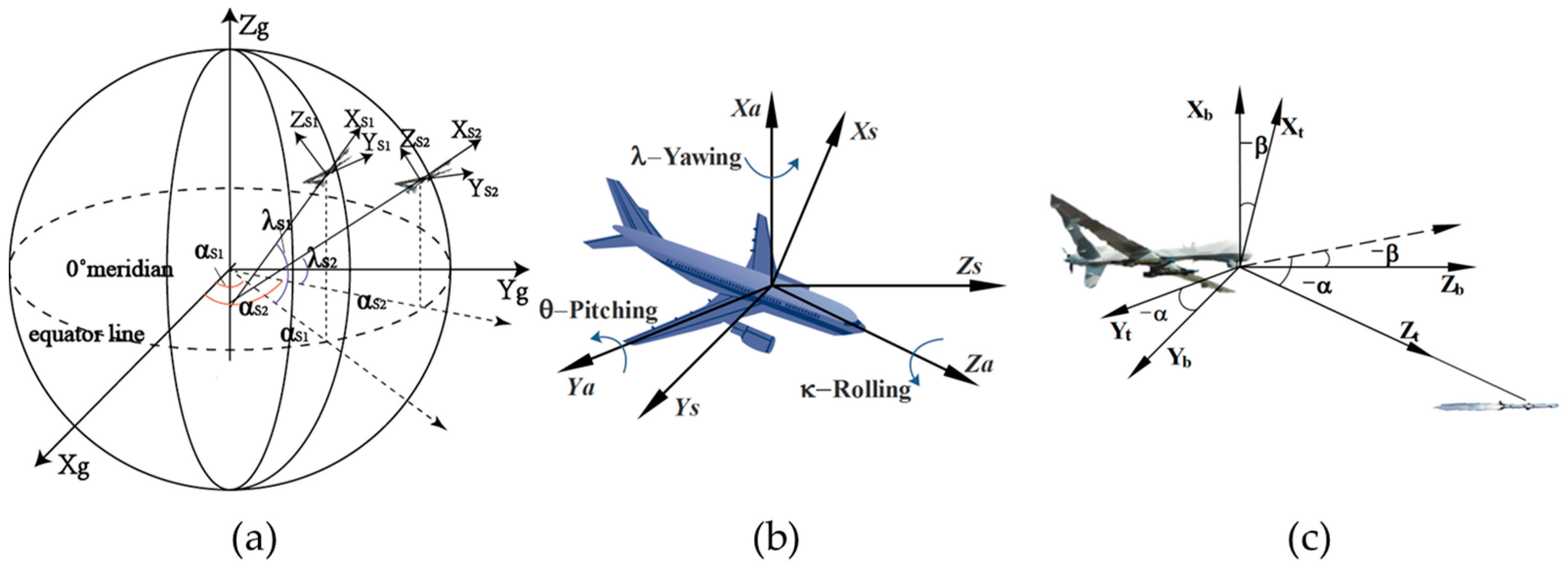
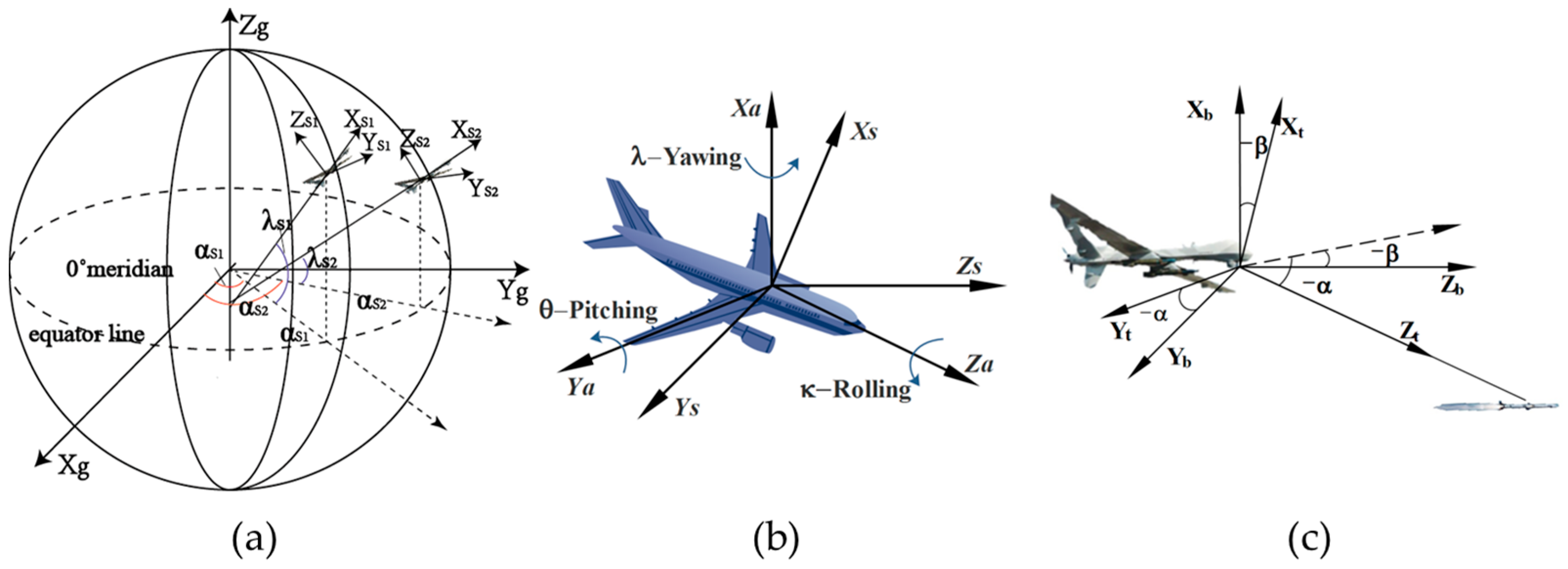
- Terrestrial rectangular coordinate system : an inertial coordinate system, as shown in the Figure 4a, where any spatial position is described by . The origin is the center of Earth’s mass. The axis points to the North Pole, and the axis is directed to the intersection point of the Greenwich meridian plane and equator. The axis is normal to the plane and constitutes, along with the axes and , a Cartesian coordinate system.
- Geographic coordinate system of UAV : as shown in the Figure 4a, the origin is the position of a UAV at a certain moment, the points to true north, the points to zenith, and the , along with and , constitutes a right-handed coordinate system.
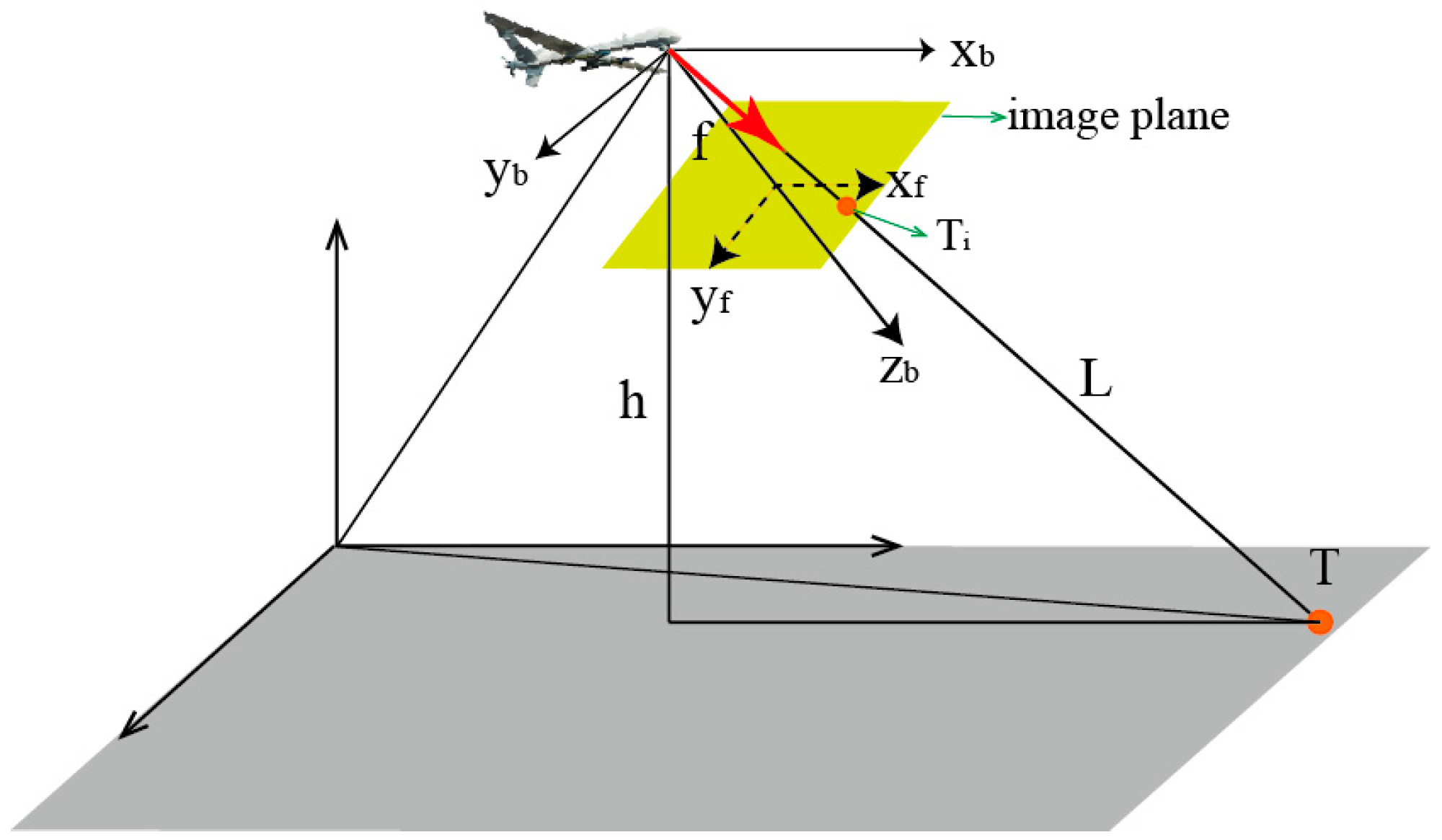
- UAV coordinate system : as shown in the Figure 4b, the origin of this coordinate system coincides with that of UAV geographic coordinate system, the points to the direction right above the aircraft, the points to the aircraft nose, and the , along with and , forms a right-handed coordinate system. The relationship between the UAV coordinate system and geographic coordinate system is shown in the Figure 4b. The tri-axial attitude angles are measured by the inertial navigation system.
- Camera coordinate system : the origin is the intersection of the LOS and horizontal platform axis, and axis is the telescope’s optic axis pointing to the target. When the axis is in the initial (or horizontal) position, the axis will be directed to zenith, and the axis , along with and , will constitute a right-handed coordinate system. Figure 4c shows the relationship between camera coordinate system and UAV coordinate system.
- Reference coordinate system : an auxiliary coordinate system built to facilitate intersection resolution. The origin is a definite point on the Earth ellipsoid, and the tri-axial directions are the same as in the Earth-rectangular coordinate system.
- The first eccentricity:
- The second eccentricity:
- Radius of curvature in the prime vertical: .
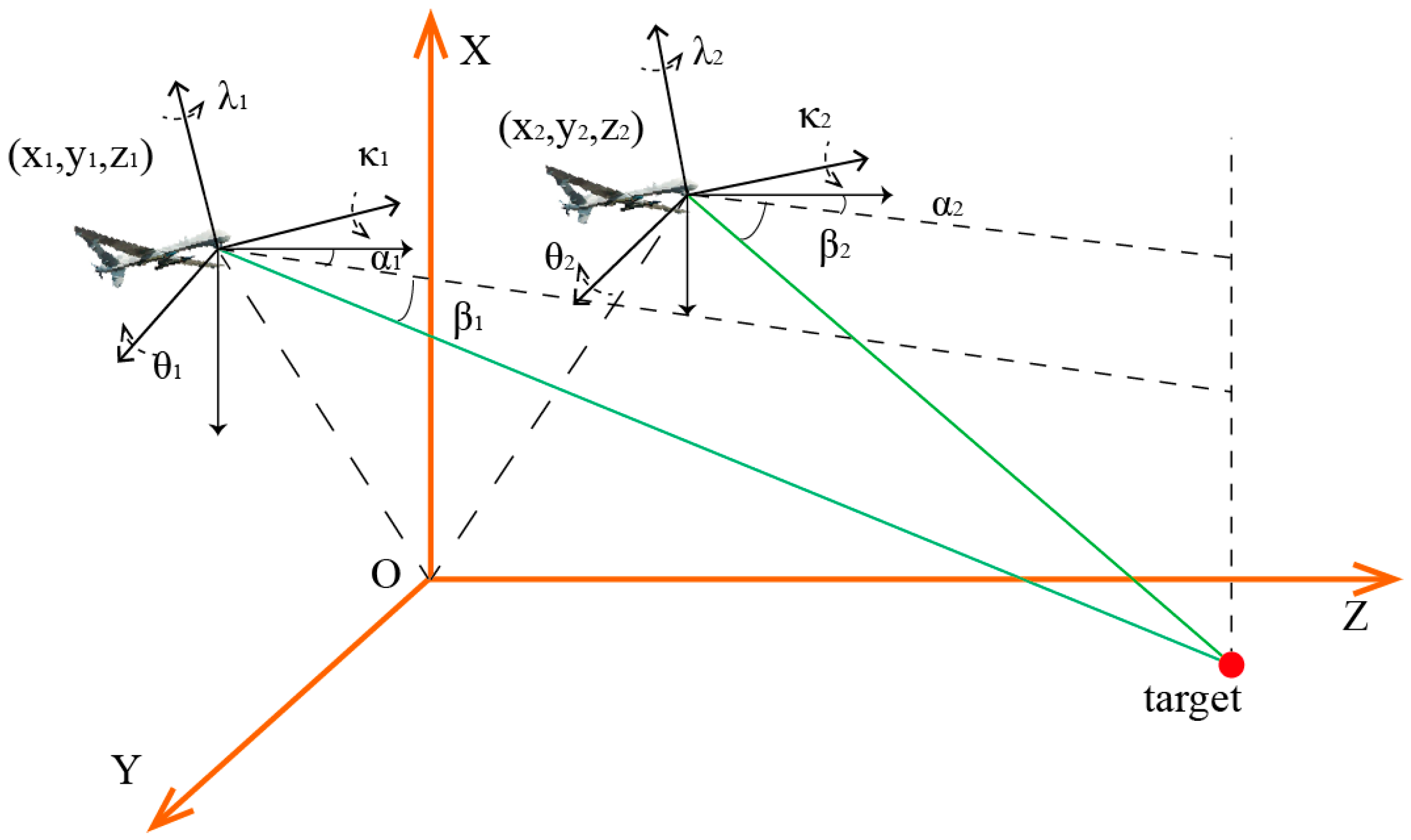
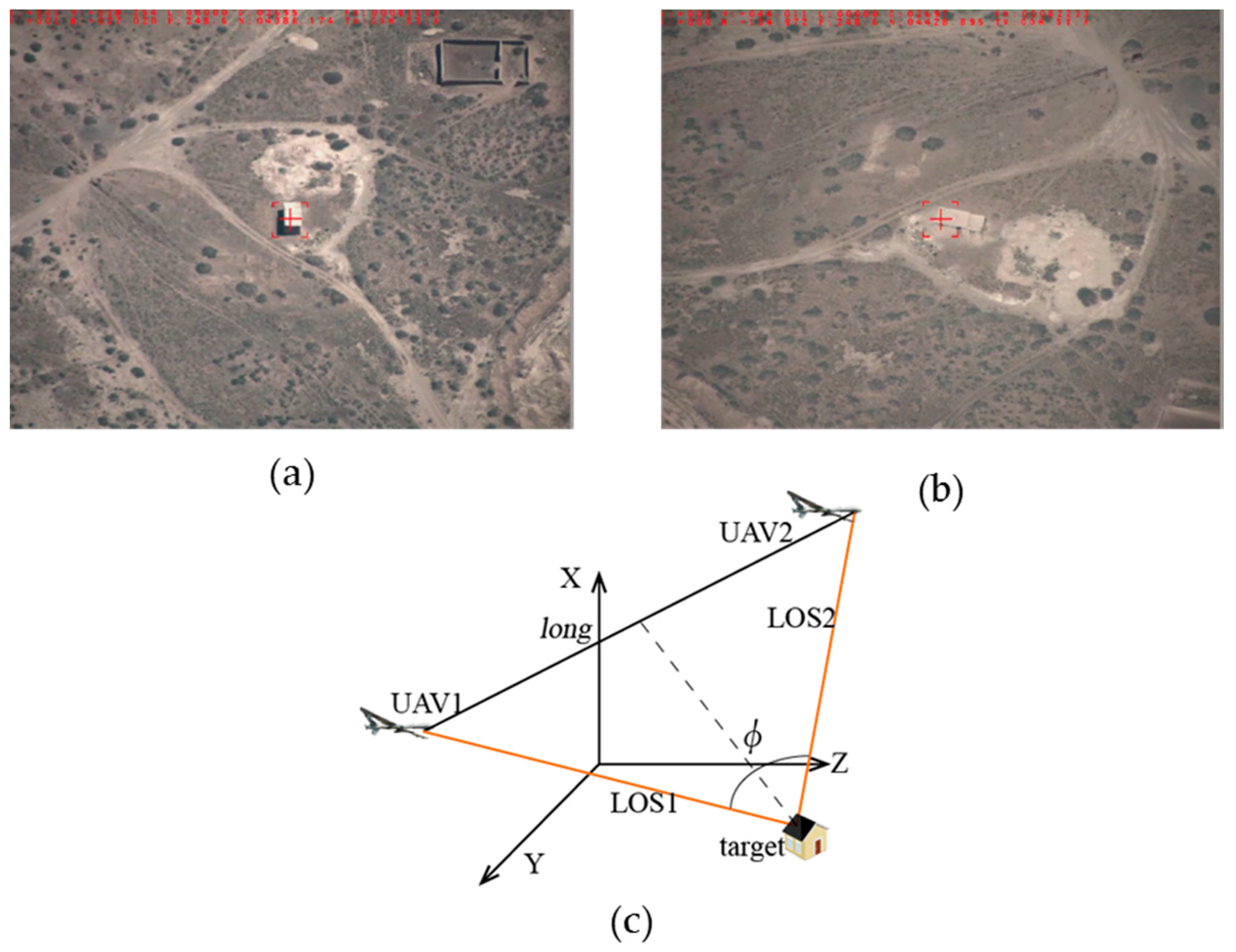
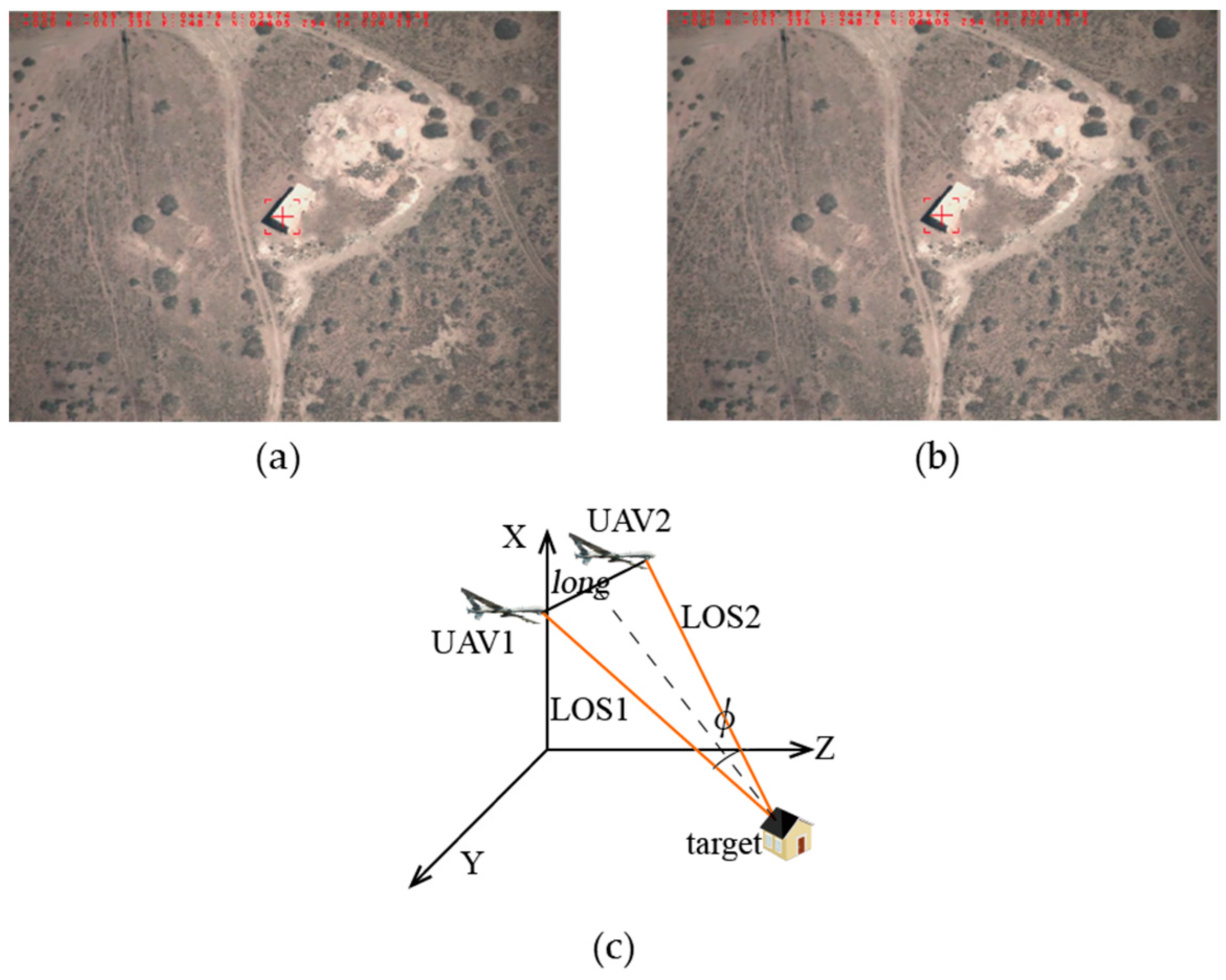
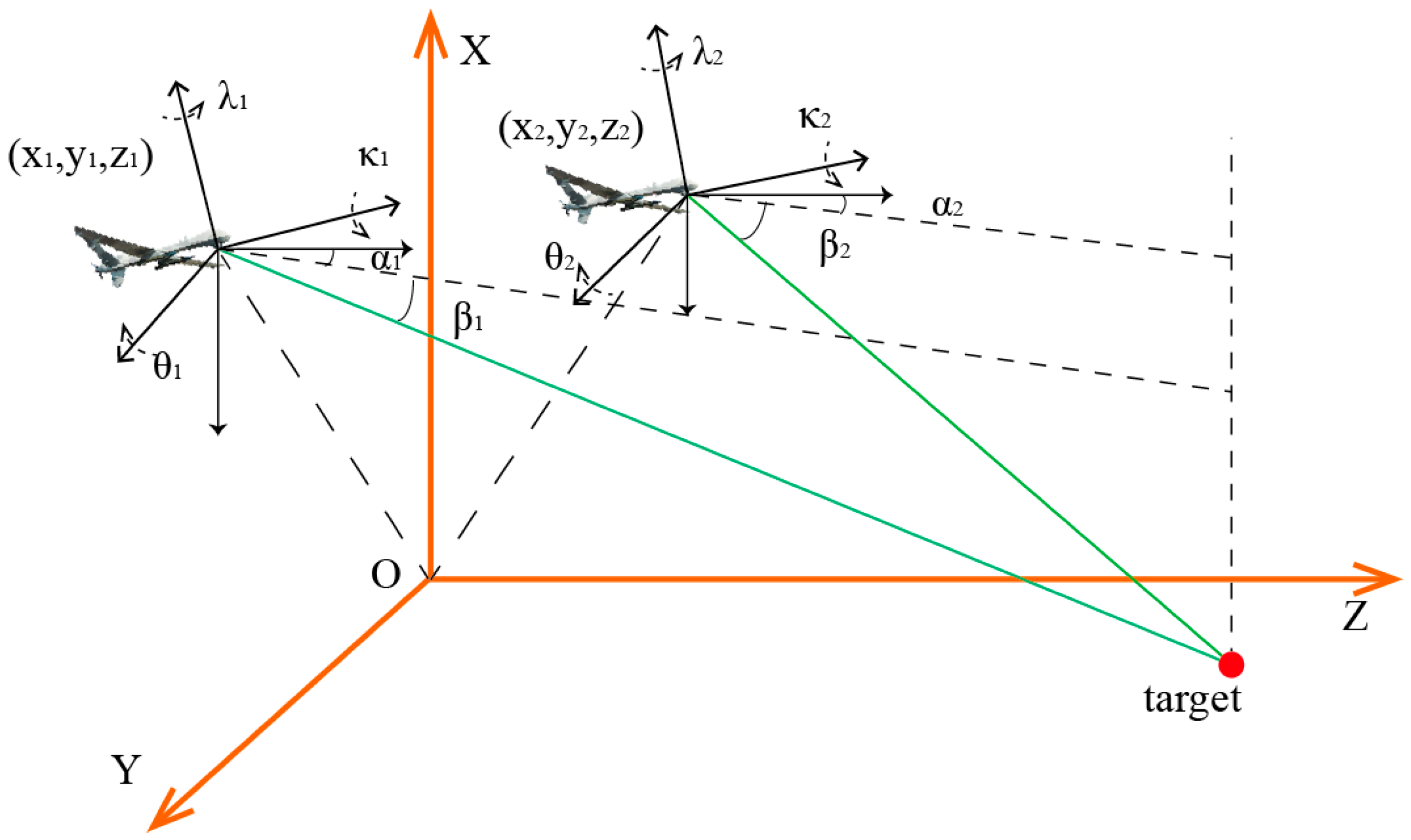
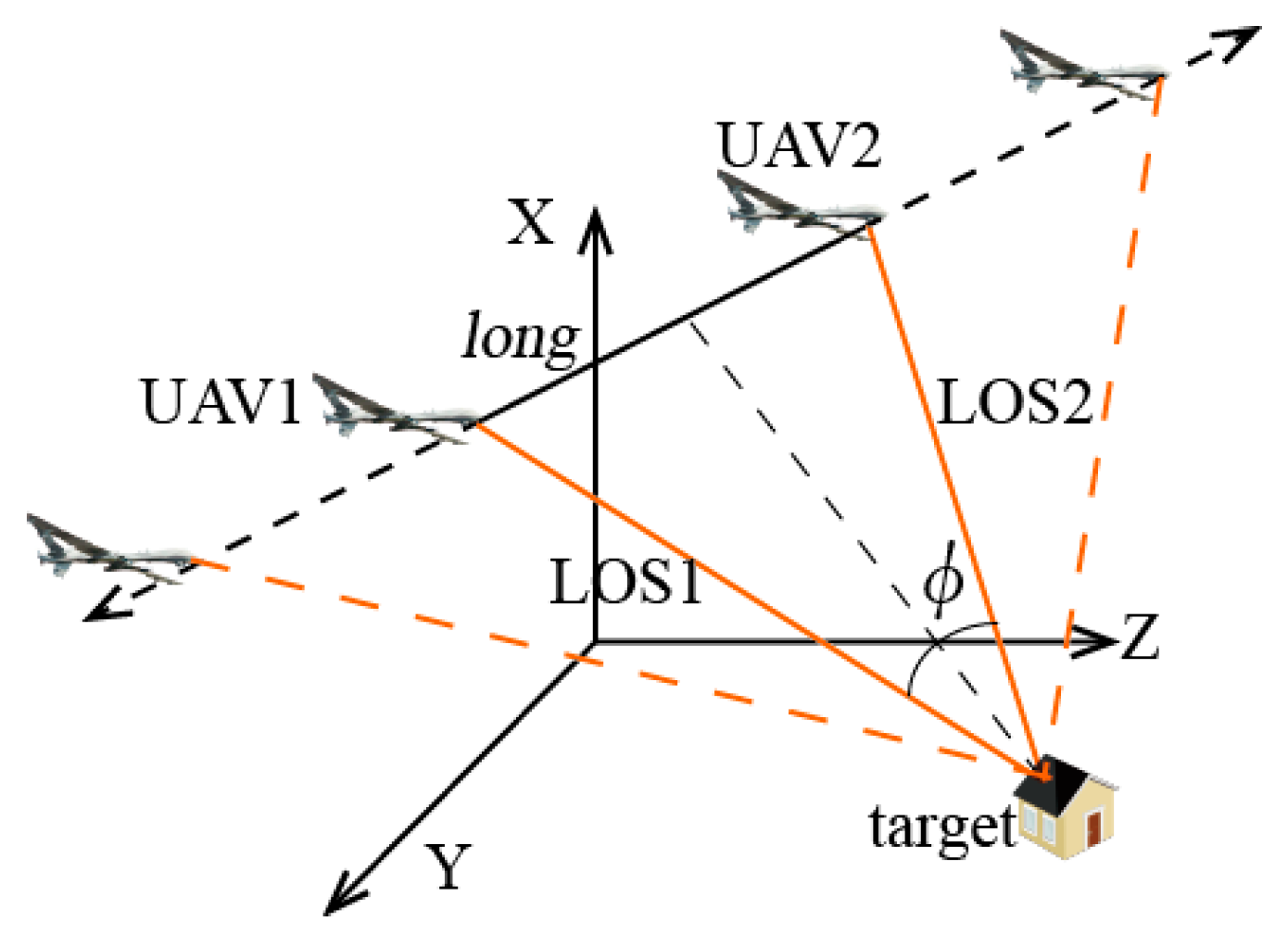
4.2. Establishment of the Two-UAV Intersection Localization Model
5. Accuracy Analysis and Simulation Experiment
5.1. Influence of UAV Position on Localization Accuracy
5.1.1. Influence of Baseline Length on Localization Accuracy
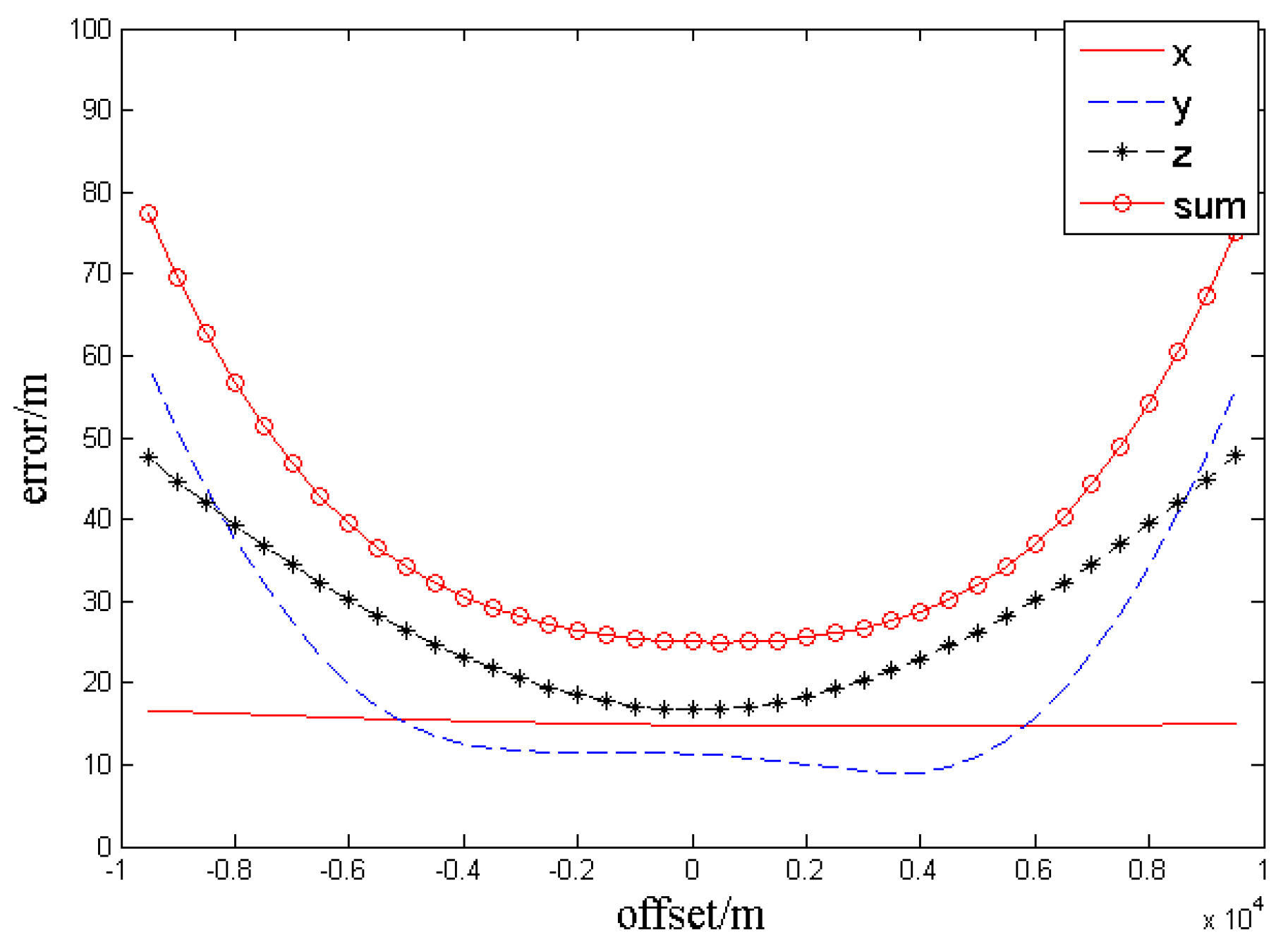
5.1.2. Localization Accuracy of Two Tracking UAVs at the Same Altitudes but Different Distances with the Target
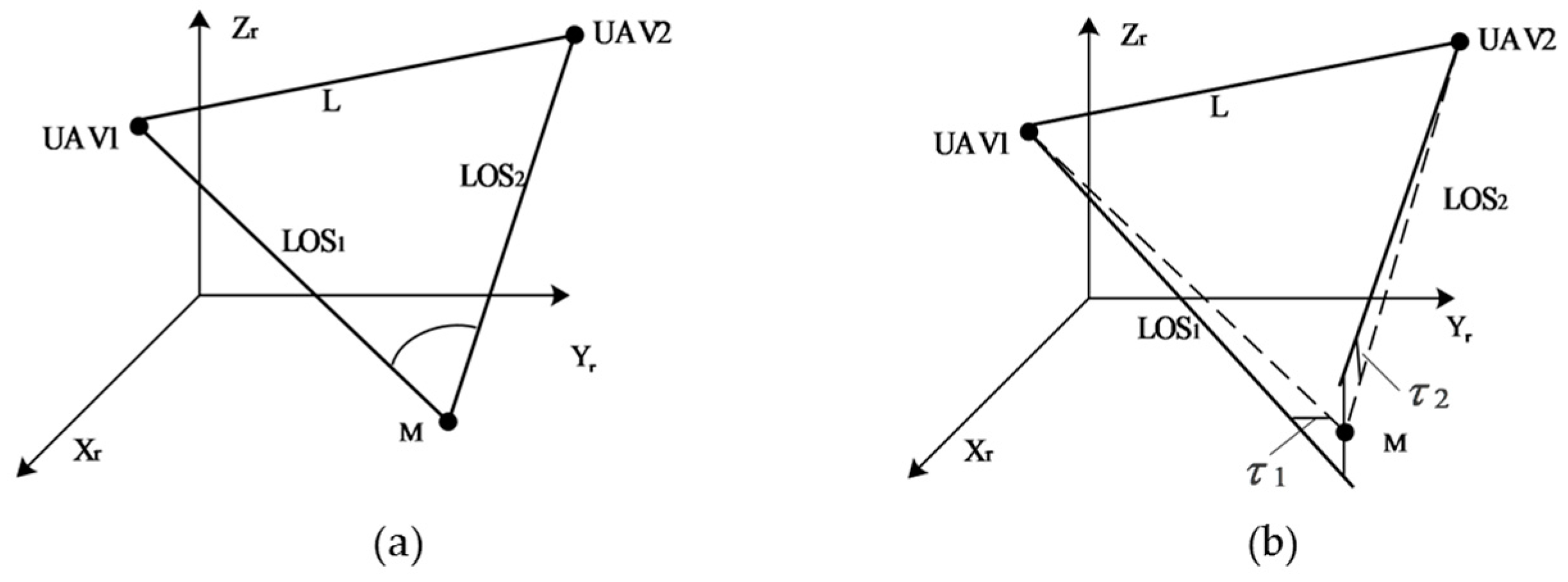
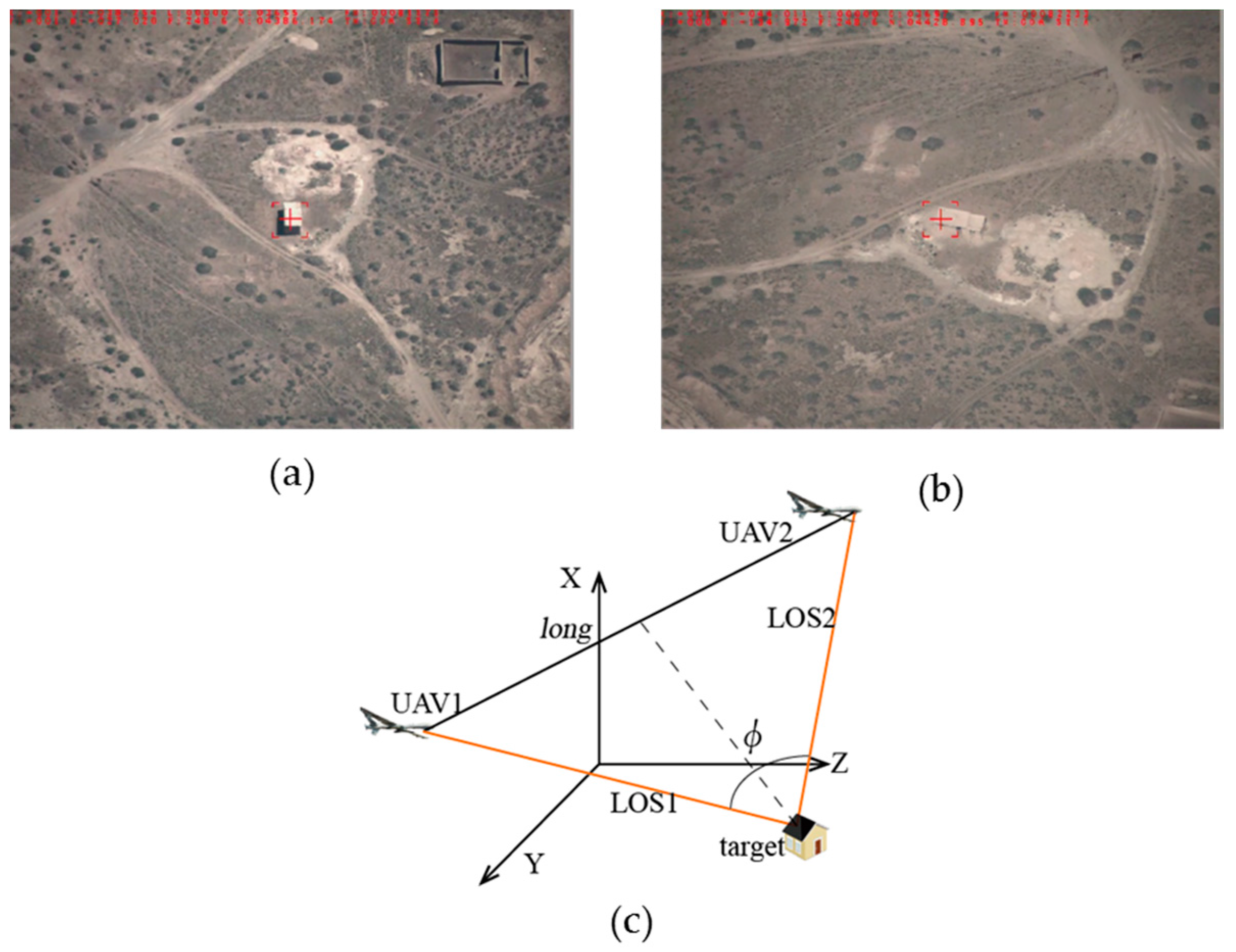
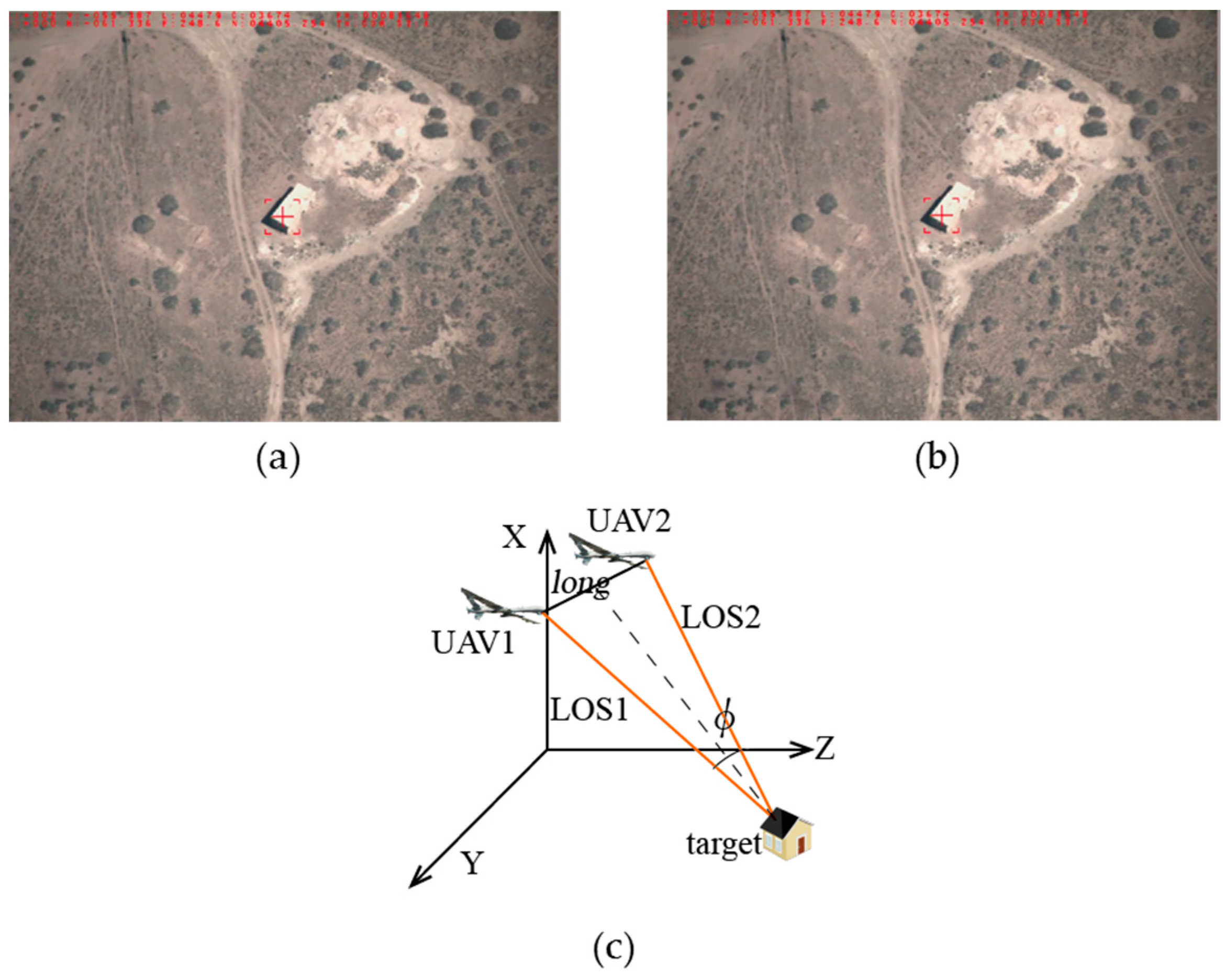
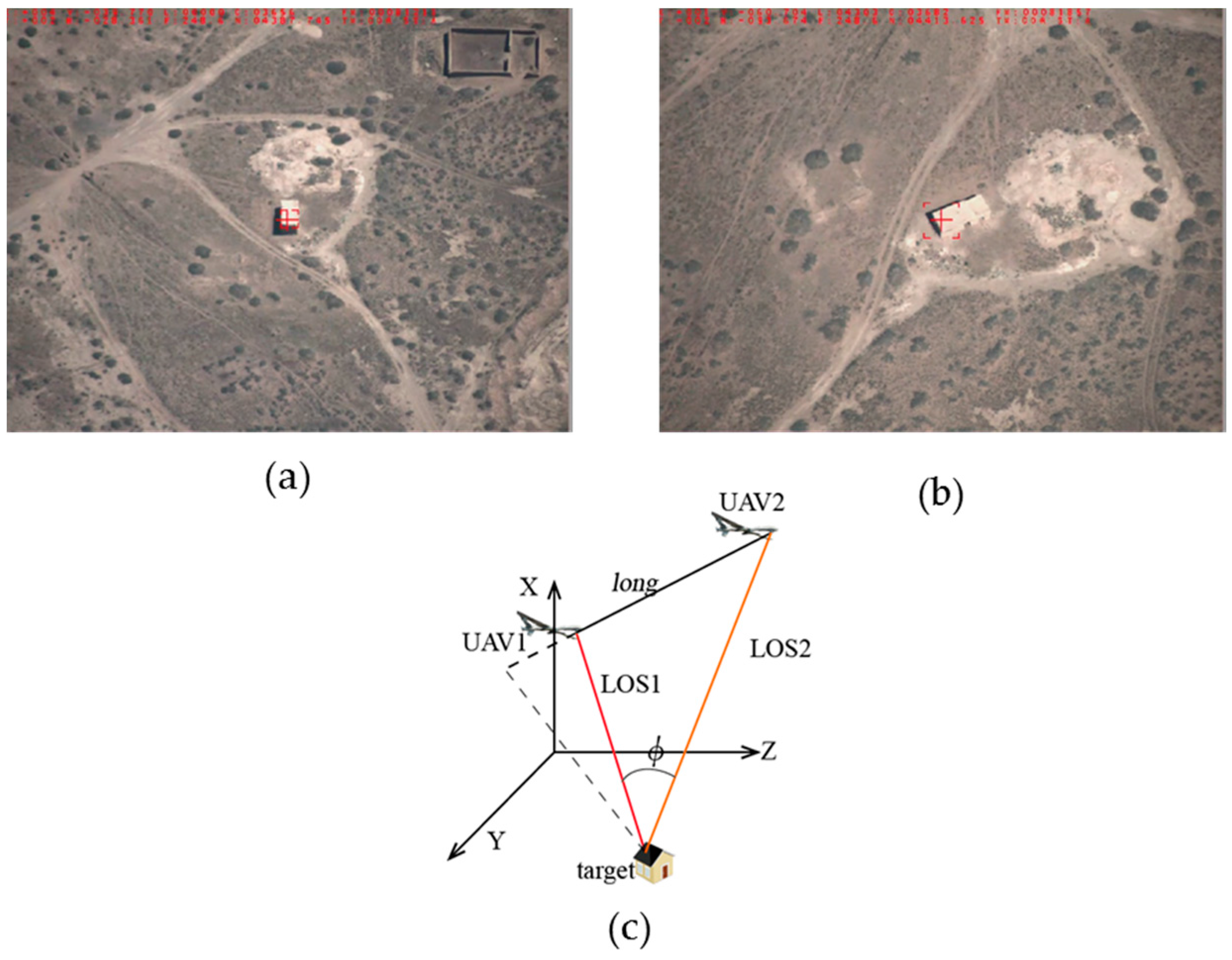
- According to the localization algorithm proposed by this paper, the optimal position for the two-UAV intersection system to locate the target is when the two UAVs and the target are on the same horizontal line and the azimuth of UAV 1 in relation to the target is just the opposite of that of UAV 2, namely the positions of the two UAVs in relation to the target are the same, with an intersection angle of 72.6318°. In this paper, the distance from the simulated target to a UAV baseline is 5 km and, accordingly, the baseline length in the optimal measuring position is long = 7.35 km. In this case, the x-axis error is 14.83 m, the y-axis error is 11.31 m, the z-axis error is 16.68 m, and the error radius sum is 25.0235 m.
- In the real world, both the target and the UAVs are moving continuously along unpredictable tracks, so it is very difficult for the UAVs to remain in the optimal measuring positions for target localization. When the two UAVs are kept parallel to each other and at the same horizontal plane as the target, an intersection angle of 28.1°–116.8° can achieve a desirable localization result.
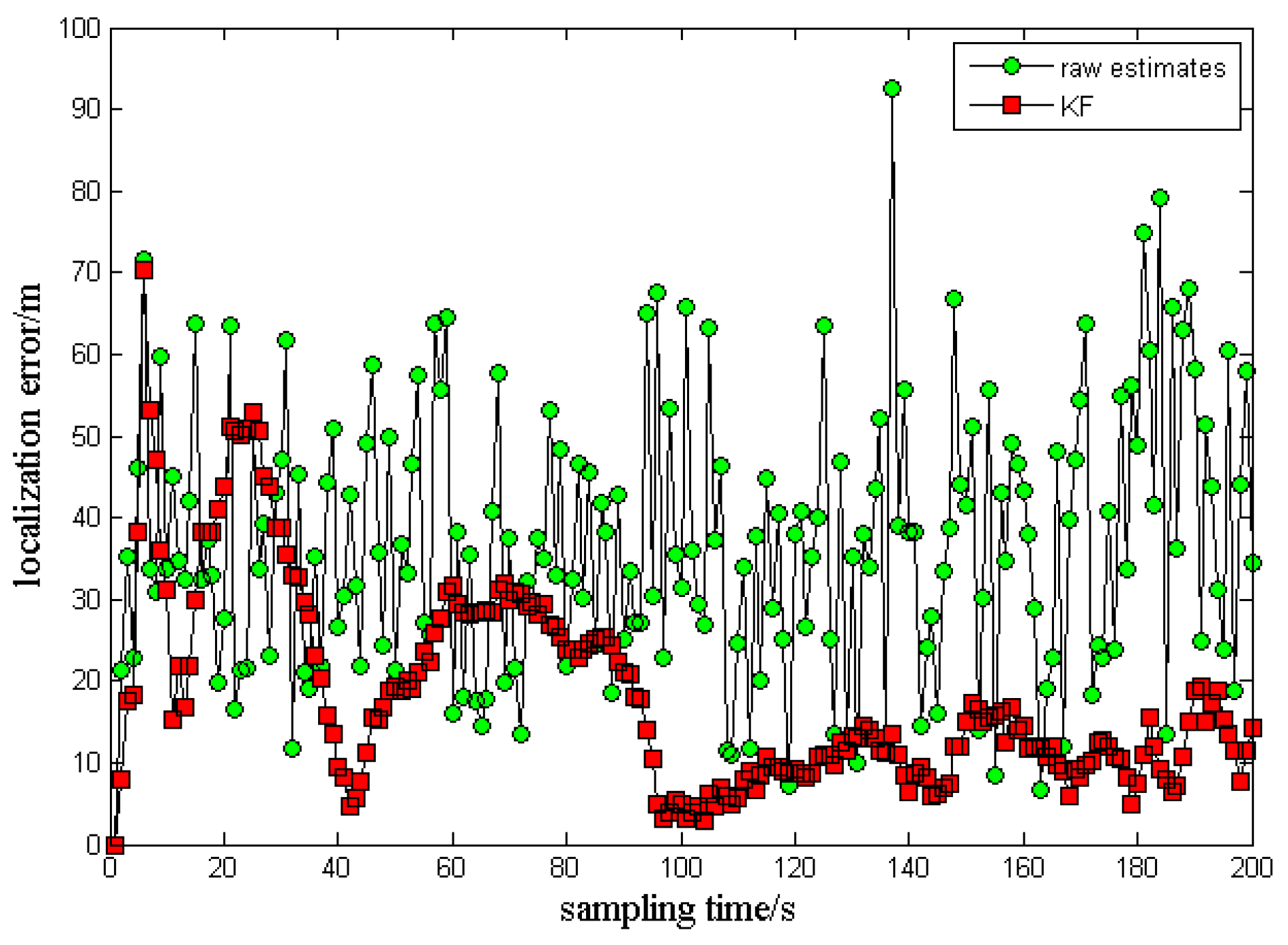
5.2. Modified Adaptive Kalman Filtering during Two-UAV Intersection Localization
5.2.1. Modified Adaptive Kalman Filtering Modeling
5.2.2. Filter Initialization
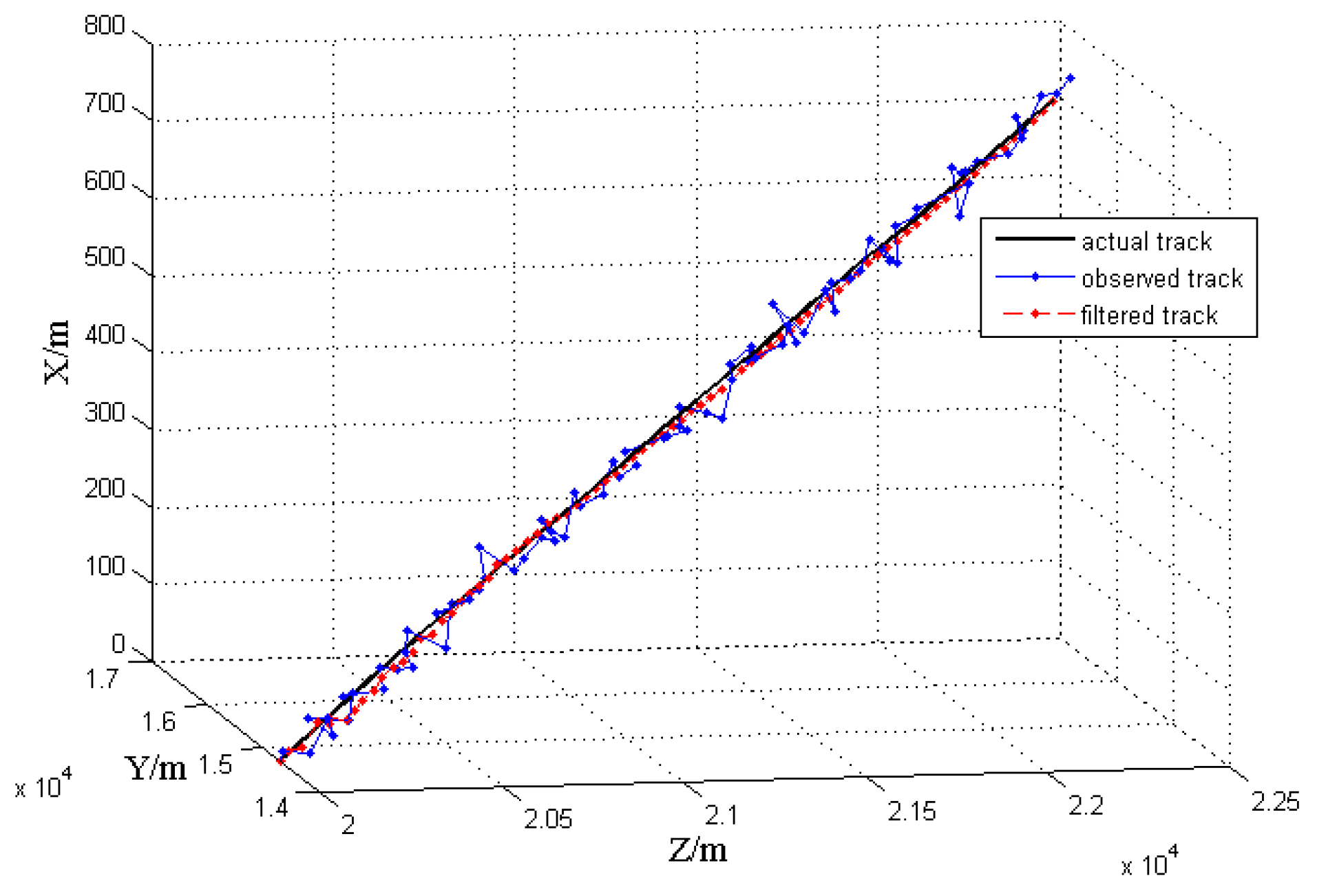
5.2.3. Test Results
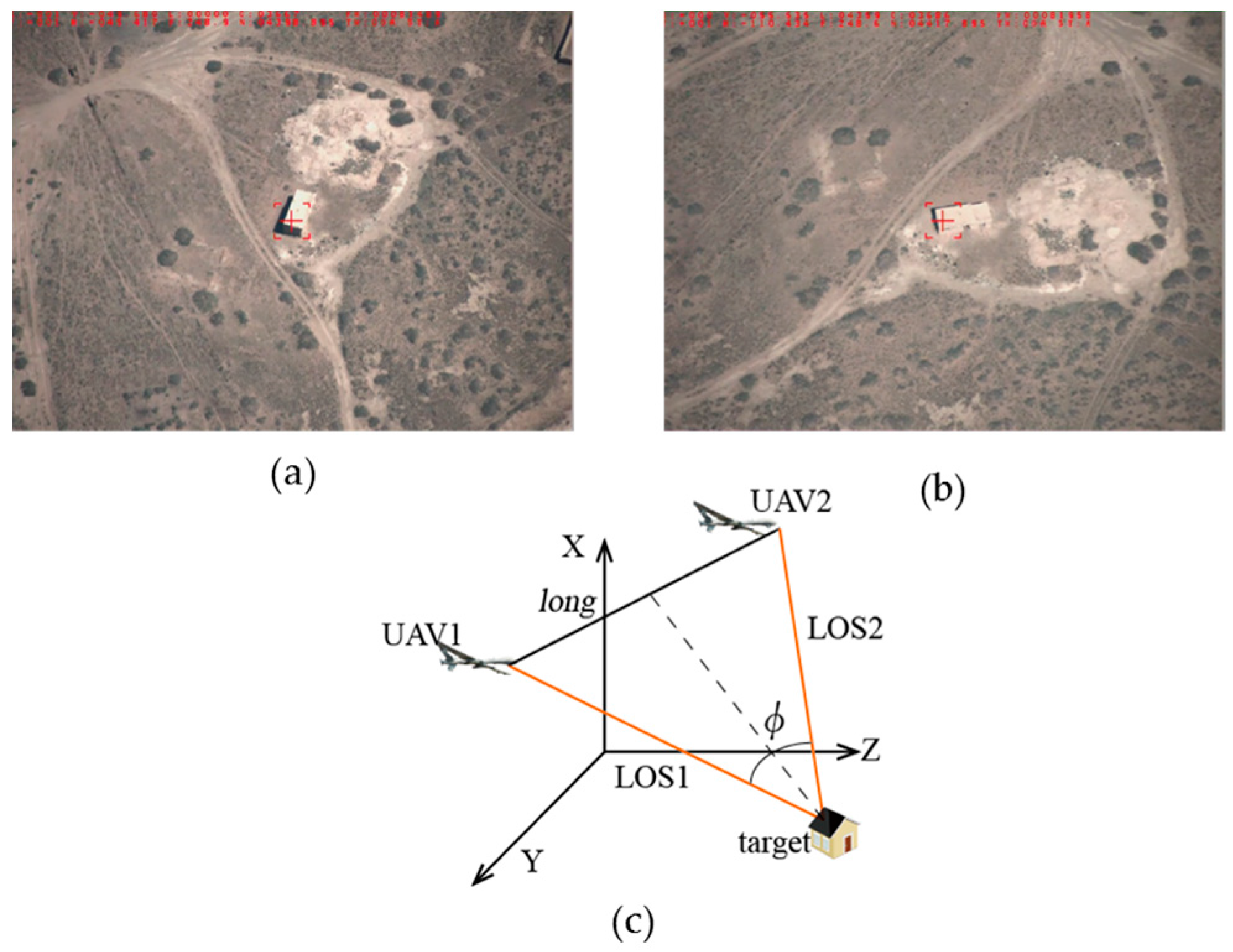
5.3. Flight Data Results
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Eric, J.S. Geo-Pointing and Threat Location Techniques for Airborne Border Surveillance. In Proceedings of the IEEE International Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 12–14 November 2013; pp. 136–140.
- Gao, F.; Ma, X.; Gu, J.; Li, Y. An Active Target Localization with Moncular Vision. In Proceedings of the IEEE International Conference on Control & Automation (ICCA), Taichung, Taiwan, 18–21 June 2014; pp. 1381–1386.
- Su, L.; Hao, Q. Study on Intersection Measurement and Error Analysis. In Proceedings of the IEEE International Conference on Computer Application and System Modeling (ICCASM), Taiyuan, China, 22–24 October 2010.
- Liu, L.; Liu, L. Intersection Measuring System of Trajectory Camera with Long Narrow Photosensitive Surface. In Proceedings of the Society of Photo-Optical Instrumentation Engineers (SPIE), Beijing, China, 26 January 2006; pp. 1006–1011.
- Hu, T. Double UAV Cooperative Localization and Remote Location Error Analysis. In Proceedings of the 5th International Conference on Advanced Design and Manufacturing Engineering, Shenzhen, China, 19–20 September 2015; pp. 76–81.
- Lee, W.; Bang, H.; Leeghim, H. Cooperative localization between small UAVs using a combination of heterogeneous sensors. Aerosp. Sci. Technol. 2013, 27, 105–111. [Google Scholar] [CrossRef]
- Campbell, M.E.; Wheeler, M. Vision-Based Geolocation Tracking System for Uninhabited Aerial Vehicles. J. Guid. Control Dyn. 2010, 33, 521–531. [Google Scholar] [CrossRef]
- Pachter, M.; Ceccarelli, N.; Chandler, P.R. Vision-Based Target Geo-location Using Camera Equipped MAVs. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2333–2338.
- Barber, D.B.; Redding, J.D.; McLain, T.W.; BeardEmail, R.W.; Taylor, C.N. Vision-based Target Geo-location using a Fixed-wing Miniature Air Vehicle. J. Intell. Robot. Syst. 2006, 47, 361–382. [Google Scholar] [CrossRef]
- Whitacre, W.W.; Campbell, M.E. Decentralized Geolocation and Bias Estimation for Uninhabited Aerial Vehicles with Articulating Cameras. J. Guid. Control Dyn. 2011, 34, 564–573. [Google Scholar] [CrossRef]
- William, W. Cooperative Geolocation Using UAVs with Gimballing Camera Sensors with Extensions for Communication Loss and Sensor Bias Estimation. Ph.D. Thesis, Cornell University, New York, NY, USA, 2010. [Google Scholar]
- Campbell, M.; Whitacre, W. Cooperative Geolocation and Sensor Bias Estimation for UAVs with Articulating Cameras. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009.
- Pachter, M.; Ceccarelli, N.; Chandler, P.R. Vision-Based Target Geolocation Using Micro Air Vehicles. J. Guid. Control Dyn. 2008, 31, 297–615. [Google Scholar] [CrossRef]
- Liu, F.; Du, R.; Jia, H. An Effective Algorithm for Location and Trackingthe Ground Target Based on Near Space Vehicle. In Proceedings of the 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015; pp. 2480–2485.
- Hosseinpoor, H.R.; Samadzadegan, F.; DadrasJavan, F. Pricise Target Geolocation Based on Integeration of Thermal Video Imagery and RTK GPS in UAVs. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 41, 333–338. [Google Scholar] [CrossRef]
- Hosseinpoor, H.R.; Samadzadegan, F.; DadrasJavan, F. Pricise Target Geolocation and Tracking Based on UAV Video Imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B6, 243–249. [Google Scholar] [CrossRef]
- Conte, G.; Hempel, M.; Rudol, P.; Lundstrom, D.; Duranti, S.; Wzorek, M.; Doherty, P. High Accuracy Ground Target Geo-location Using Autonomous Micro Aerial Vehicle Platforms. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008.
- Frew, E.W. Sensitivity of Cooperative Target Geolocalization to Orbit Coordination. J. Guid. Control Dyn. 2008, 31, 1028–1040. [Google Scholar] [CrossRef]
- Ross, J.; Geiger, B.; Sinsley, G.; Horn, J.; Long, L.; Niessner, A. Vision-based Target Geolocation and Optimal Surveillance on an Unmanned Aerial Vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Honolulu, HI, USA, 18–21 August 2008.
- Sohn, S.; Lee, B.; Kim, J.; Kee, C. Vision-Based Real-Time Target Localization for Single-Antenna GPS-Guided UAV. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1391–1401. [Google Scholar] [CrossRef]
- Cheng, X.; Daqing, H.; Wei, H. High Precision Passive Target Localization Based on Airborne Electro-optical Payload. In Proceedings of the 14th International Conference on Optical Communications and Networks (ICOCN), Nanjing, China, 3–5 July 2015.
- Sharma, R.; Yoder, J.; Kwon, H.; Pack, D. Vision Based Mobile Target Geo-localization and Target Discrimination Using Bayes Detection Theory. Distrib. Auton. Robot. Syst. 2014, 104, 59–71. [Google Scholar]
- Sharma, R.; Yoder, J.; Kwon, H.; Pack, D. Active Cooperative Observation of a 3D Moving Target Using Two Dynamical Monocular Vision Sensors. Asian J. Control 2014, 16, 657–668. [Google Scholar]
- Deng, B.; Xiong, J.; Xia, C. The Observability Analysis of Aerial Moving Target Location Based on Dual-Satellite Geolocation System. In Proceedings of the International Conference on Computer Science and Information Processing, Xi’an, China, 24–26 August 2012.
- Choi, J.H.; Lee, D.; Bang, H. Tracking an Unknown Moving Target from UAV. In Proceedings of the 5th International Conference on Automation, Robotics and Applications, Wellington, New Zealand, 6–8 December 2011; pp. 384–389.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Error Variable | Random Distribution | Error σ |
|---|---|---|
| Miss distance x | Normal distribution | 4.8 × 10−5 (m) |
| Miss distance y | Normal distribution | 4.8 × 10−5 (m) |
| UAV longitude | Normal distribution | 1 × 10−4 (°) |
| UAV latitude | Normal distribution | 1 × 10−4 (°) |
| UAV altitude | Normal distribution | 10 (m) |
| UAV pitch | Normal distribution | 0.01 (°) |
| UAV roll | Normal distribution | 0.01 (°) |
| UAV yaw | Normal distribution | 0.05 (°) |
| Camera pitch | Uniform distribution | 0.01 (°) |
| Camera azimuth | Uniform distribution | 0.01 (°) |
| Positional Relationship | Localization Algorithm | (°) | (°) | (m) | (m) |
|---|---|---|---|---|---|
| Feature Position 1 | Two-UAV localization | 15.8 | 27.6 | ||
| single-station localization | 19.4 | 37.4 | |||
| Feature Position 2 | Two-UAV localization | 21.3 | 40.6 | ||
| single-station localization | 45.2 | 72.8 | |||
| Feature Position 3 | Two-UAV localization | 118.6 | 198.3 | ||
| single-station localization | 21.3 | 38.5 | |||
| Feature Position 4 | Two-UAV localization | 19.8 | 36.2 | ||
| single-station localization | 24.6 | 51.8 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, G.; Liu, J.; Song, Y.; Zuo, Y. Two-UAV Intersection Localization System Based on the Airborne Optoelectronic Platform. Sensors 2017, 17, 98. https://doi.org/10.3390/s17010098
Bai G, Liu J, Song Y, Zuo Y. Two-UAV Intersection Localization System Based on the Airborne Optoelectronic Platform. Sensors. 2017; 17(1):98. https://doi.org/10.3390/s17010098
Chicago/Turabian StyleBai, Guanbing, Jinghong Liu, Yueming Song, and Yujia Zuo. 2017. "Two-UAV Intersection Localization System Based on the Airborne Optoelectronic Platform" Sensors 17, no. 1: 98. https://doi.org/10.3390/s17010098