
A Multi-Sensor Fusion MAV State Estimation from Long-Range Stereo, IMU, GPS and Barometric Sensors

Abstract
:1. Introduction
- (1)
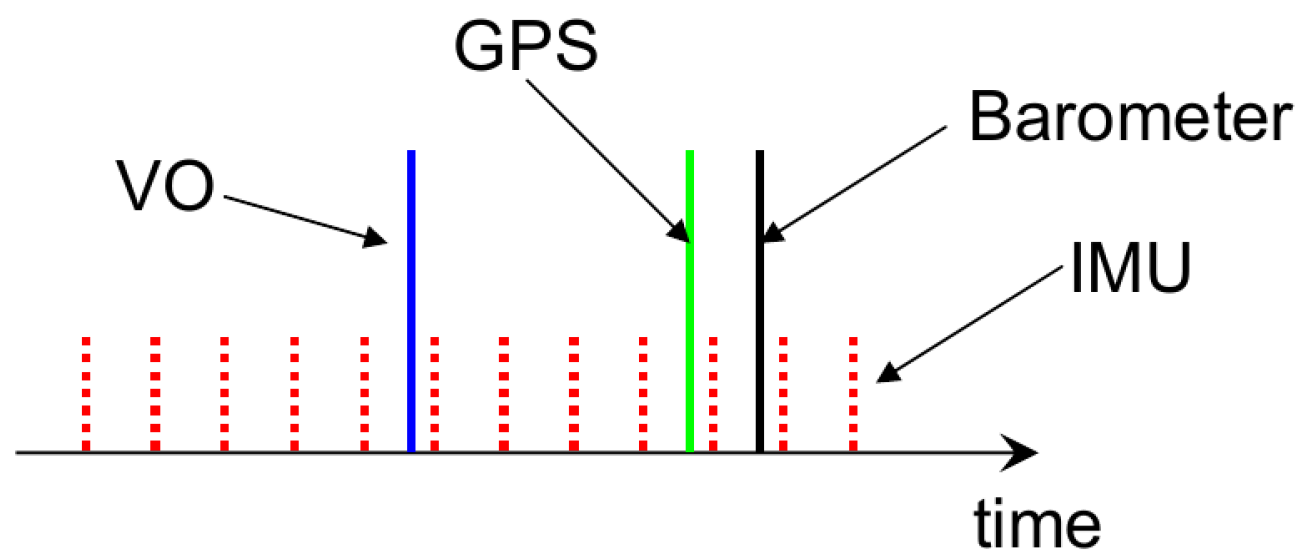
- The state estimation system utilizes both absolute state measurement sensors (GPS, barometer), the relative six DOF pose state measurement provided by VO. To deal with both absolute and relative state measurements effectively, we derive a new stochastic cloning EKF state estimator to generate accurate and smooth state estimation both for GPS-available and GPS-denied environments.
- (2)
- We developed a robust long-range stereo VO that works well both for low- and high-altitude cases. At low altitude, the VO utilizes stereo images; that means the features are directly triangulated by stereo pairs with a fixed static stereo baseline. At high altitude, the ratio between the scene depth and stereo baseline becomes large, and the stereo pair almost degenerates to a monocular system. In this situation, the additional stereo observations over time are fused by both multi-stereo triangulation and a multi-view stereo inverse depth filter for long-range feature depth generation.
- (3)
- The EKF estimator and long-range VO coordinate to improve the robustness of the method. The IMU integral prediction information from the EKF estimator is used both for guiding image-feature matching and long-range VO optimization. Additionally, the VO is utilized as the relative measurement for the update of the EKF state.
2. Related Work
3. Long-Range Stereo Odometry
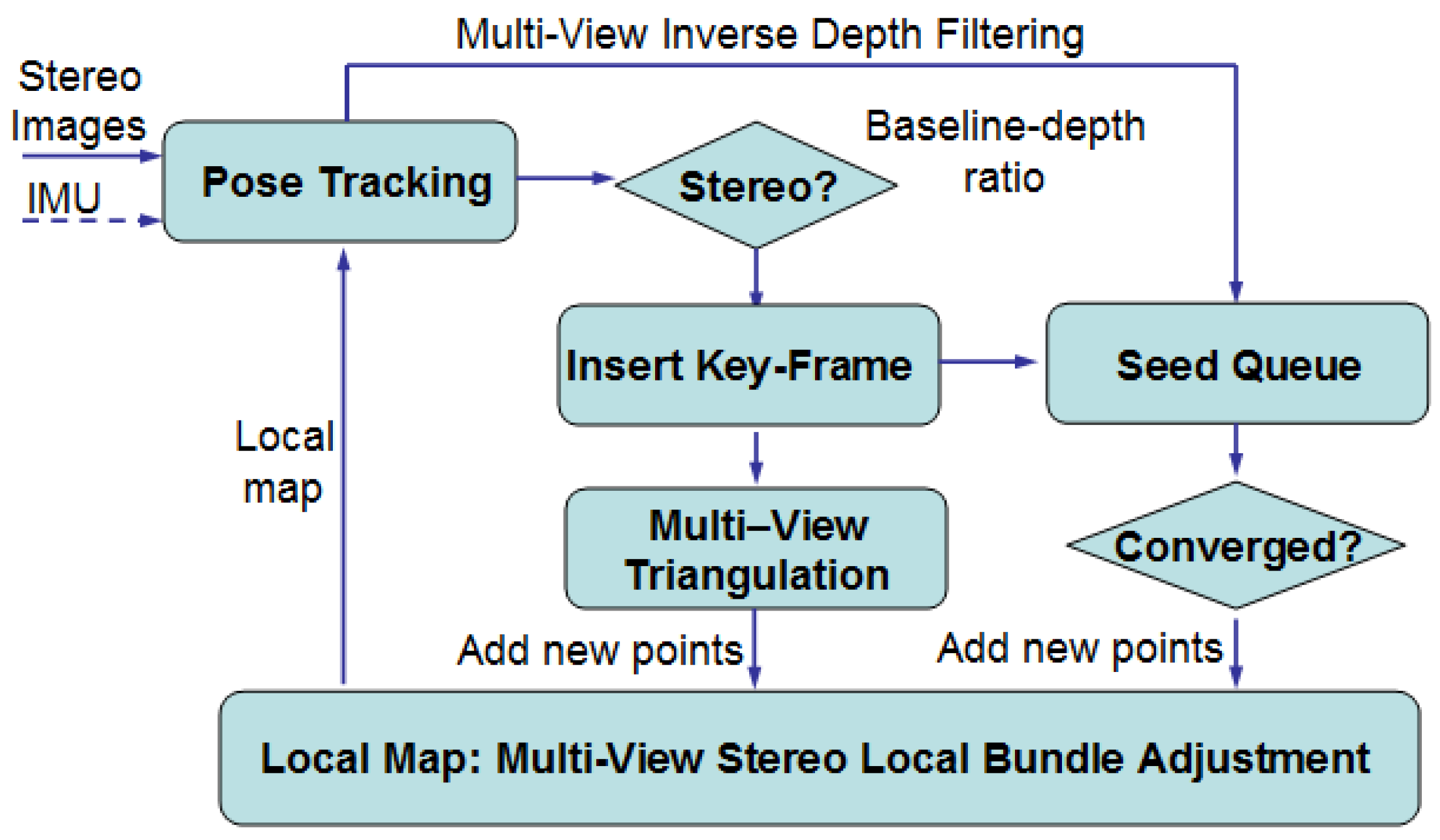
3.1. Long-Range Stereo Odometry Pipeline
- (1)
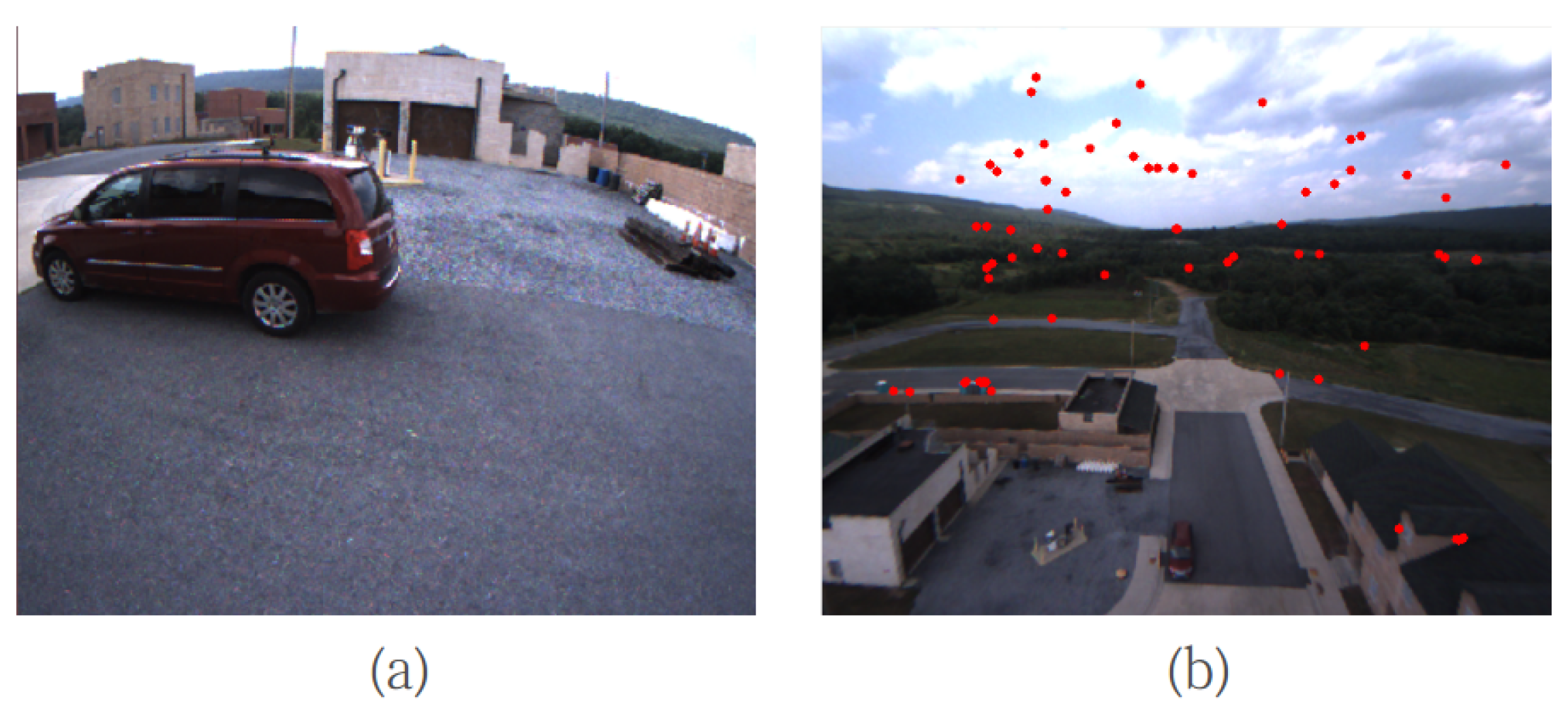
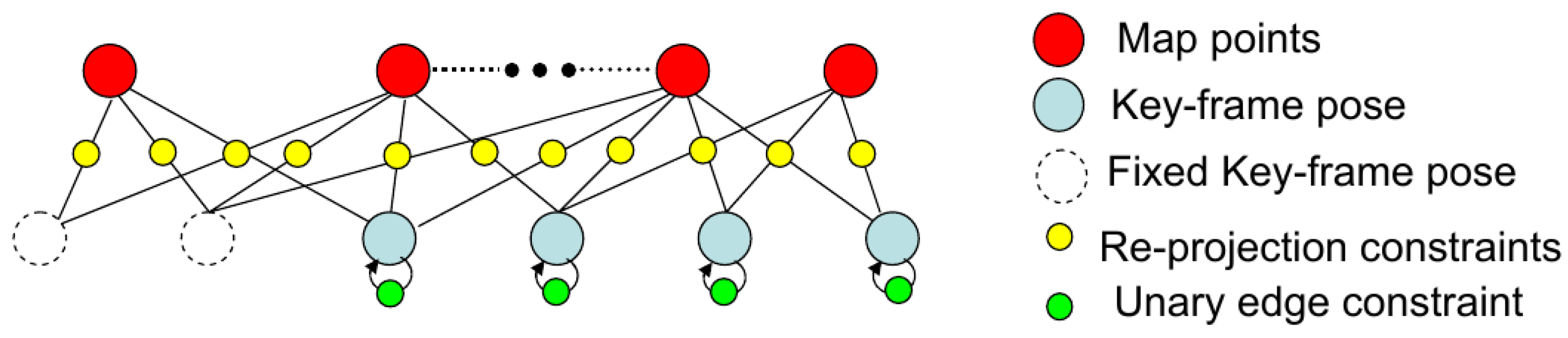
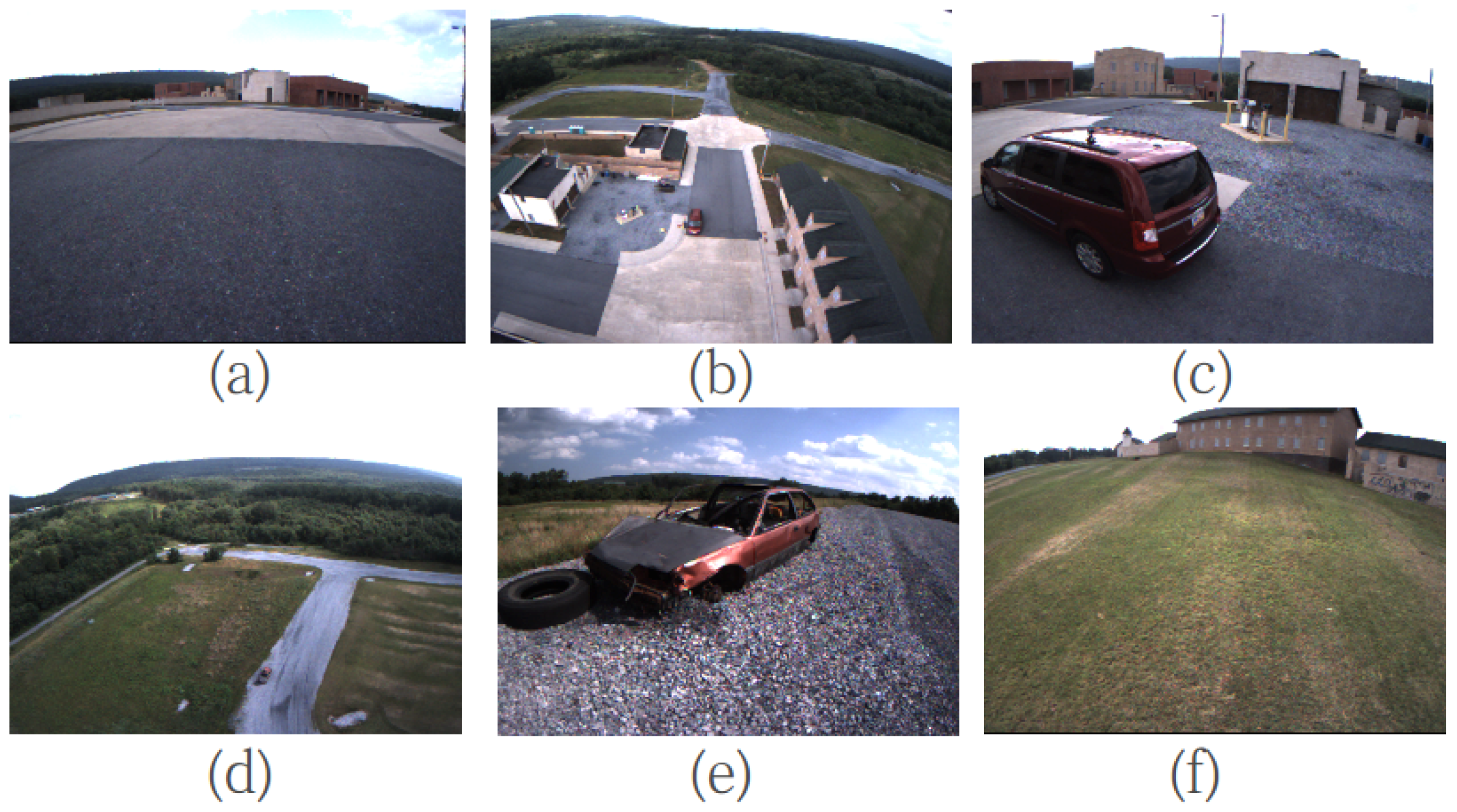
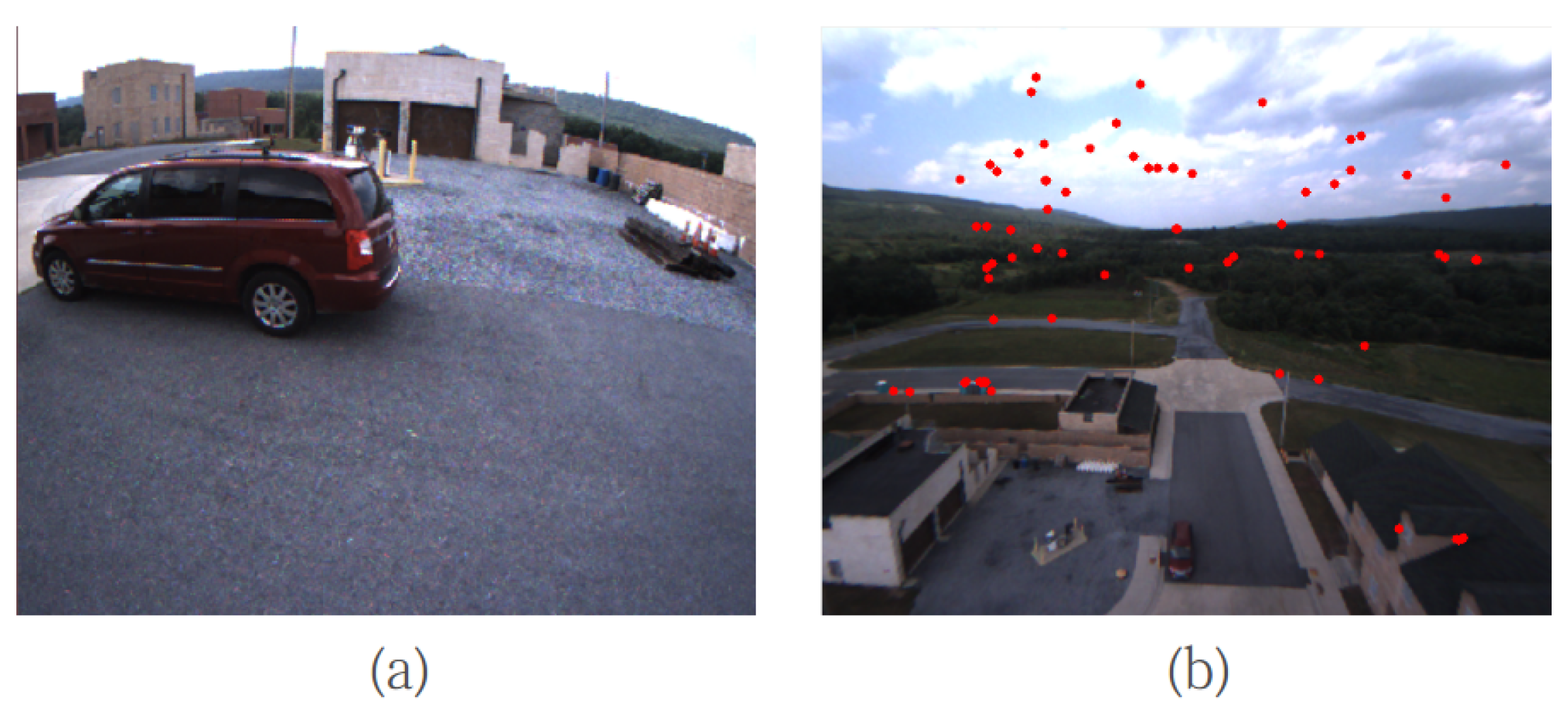
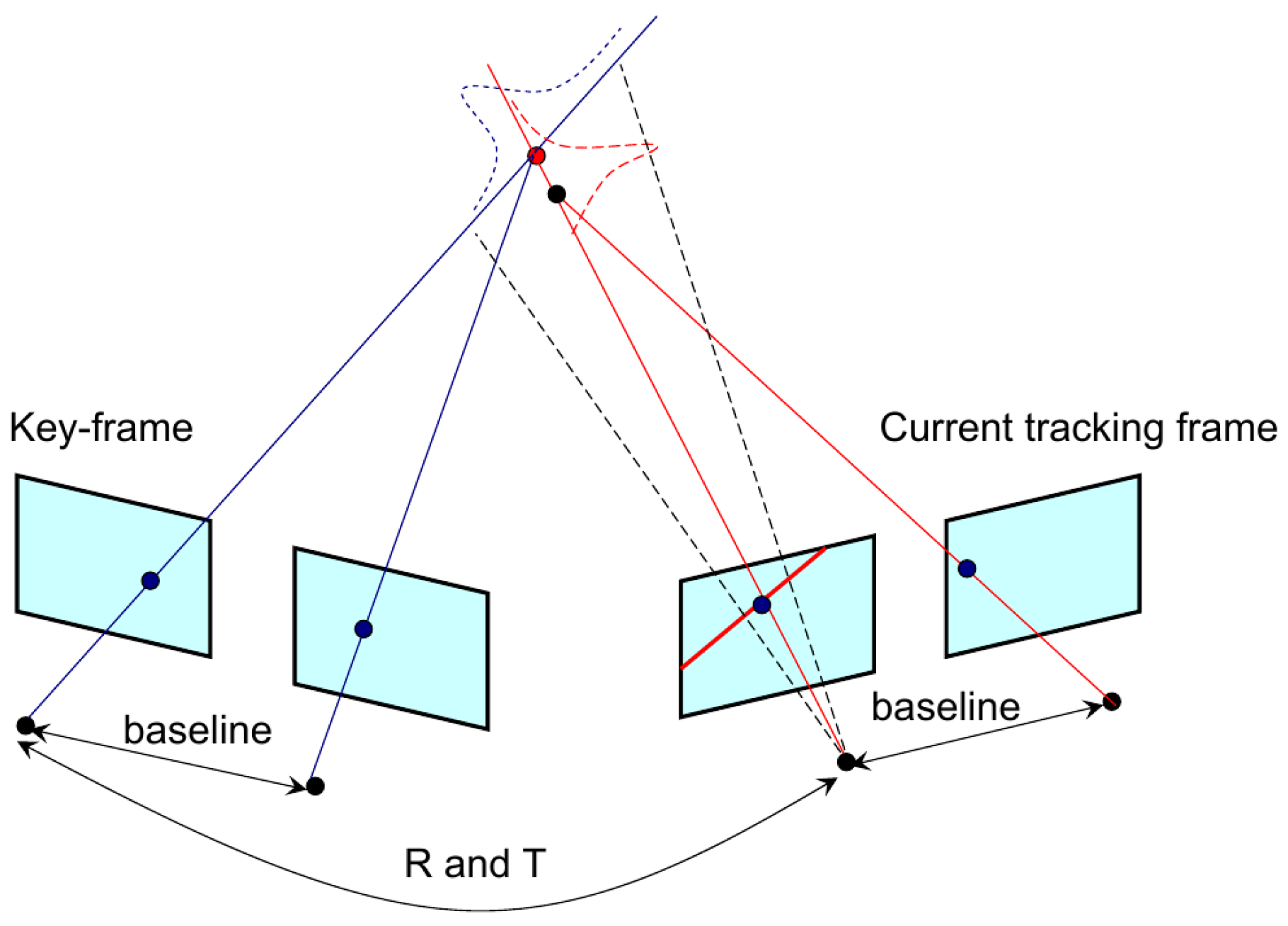
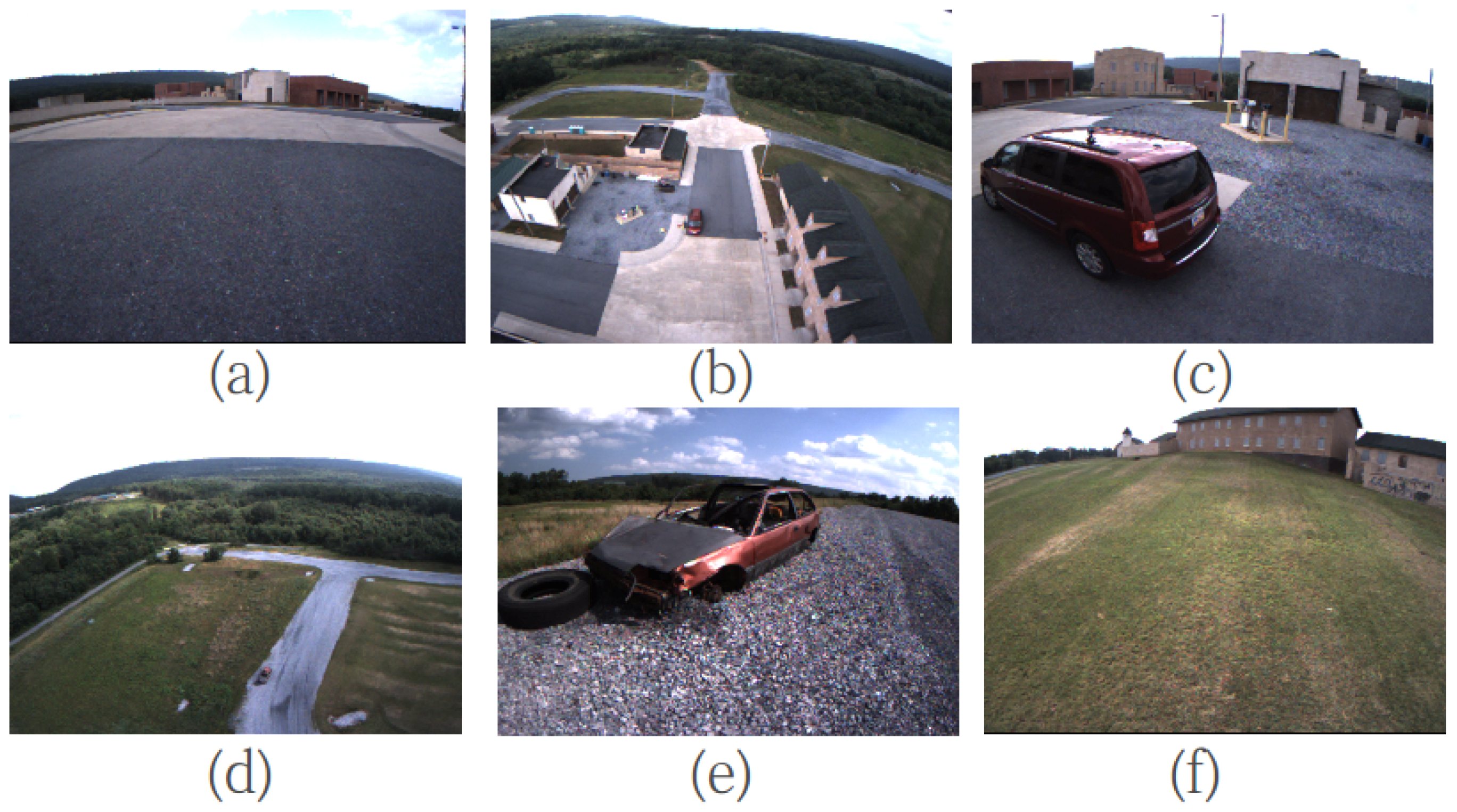
- For a short range (e.g., MAV low-altitude flight, as shown in Figure 2a, the VO works with a stereo mode. For each new selected key-frame, most of the new features are directly triangulated by the stereo camera pair with the static stereo baseline. For some long-range points, they are triangulated using both the pseudo-baseline formed by the key-frame’s poses and the static stereo baseline. In stereo mode, the environment structure is close to the camera; the image context easily changes especially for camera rotation. Therefore, the key-frames and its features are inserted into the local map relatively densely.
- (2)
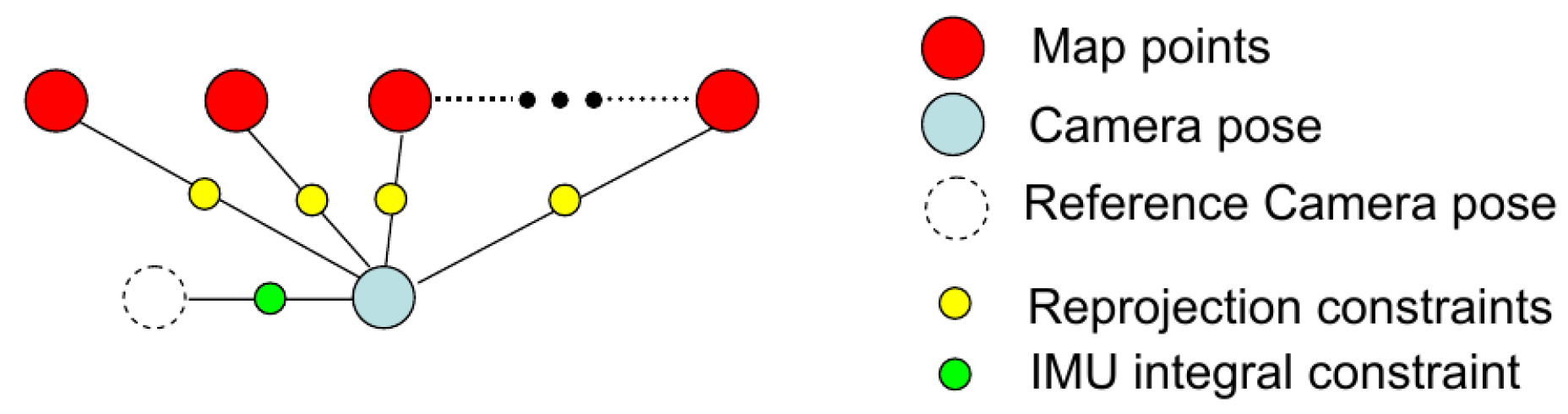
- For a long range (e.g., high-altitude flight, as shown in Figure 2b, the VO switches to monocular mode. The key-frames are inserted sparsely to provide enough relative motion between the key-frames for long-range triangulation. When VO is in a long-range mode, no features will be directly triangulated by static stereo. Because most of the “short-range points” will be outliers due to an incorrect matching from a low or repetitive texture area, such as sky, cloud and trees, instead, the new features will first be triangulated using both a dynamic pseudo baseline and a static stereo baseline. For the new features that cannot be triangulated by the pseudo baseline, we insert them into a “candidate queue”. The feature depth will be iteratively refined by subsequently tracking stereo information with a multi-view inverse depth filter. If the inverse depth converges, the candidate feature will be added into the map and then used for camera pose tracking.
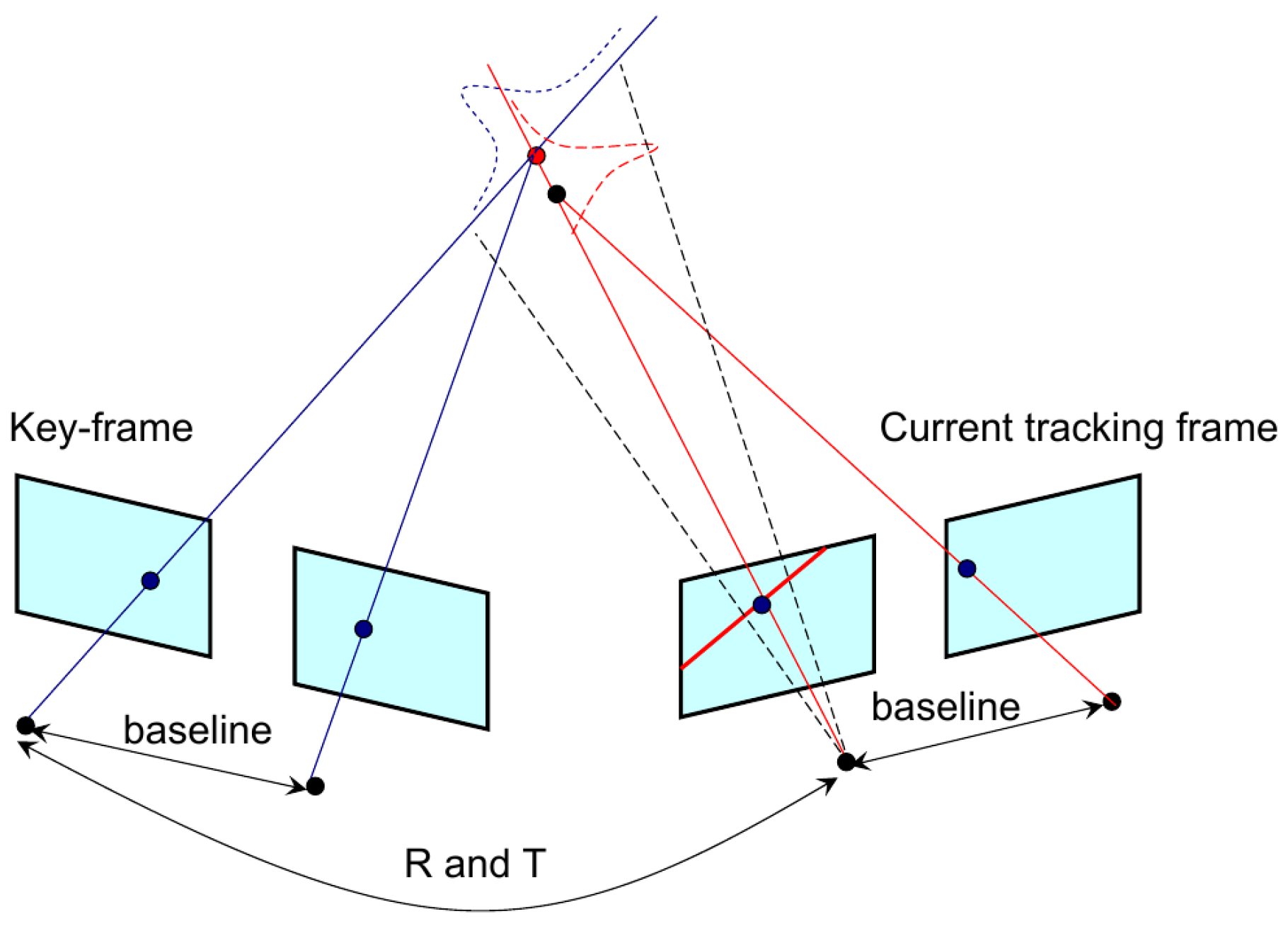
3.2. Long-Range Point Generation Using Multi-View Stereo Triangulation
- (1)
- the features have been matched with the map.
- (2)
- new features with an effective stereo depth (i.e, short-range points, with enough stereo disparity).
- (3)
- new features with small disparities (long-range points).
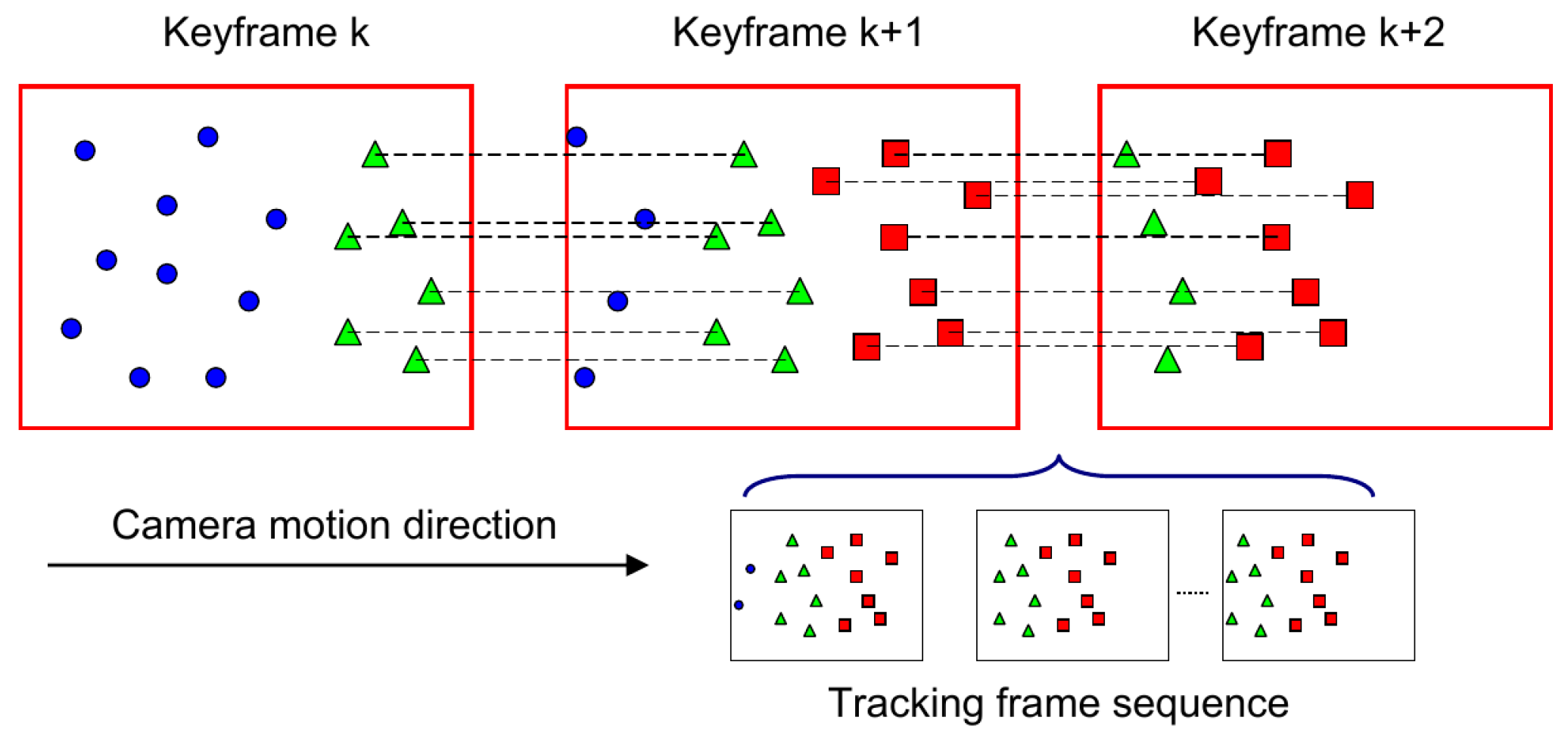
3.3. Long-Range Point Generation by Multi-View Stereo Inverse Depth Filtering
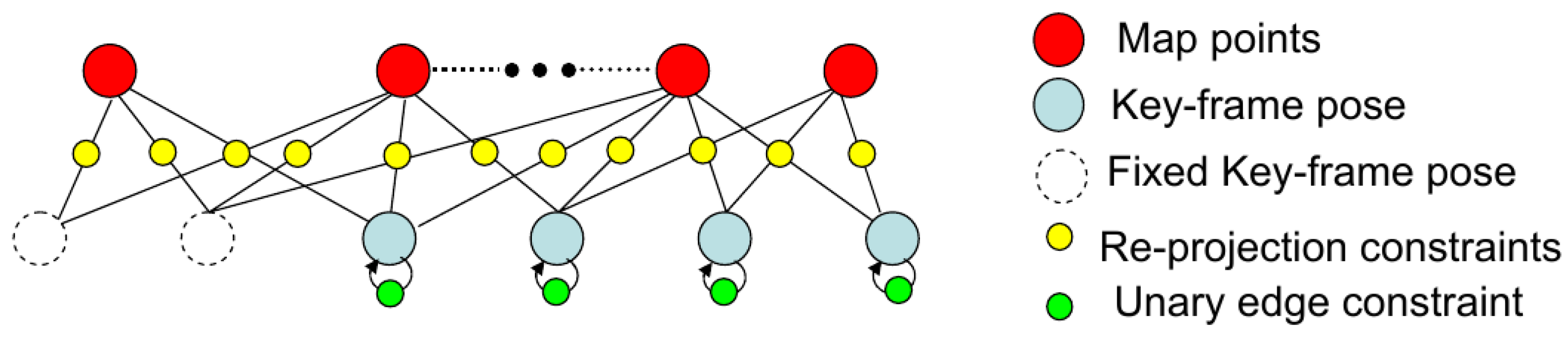
3.4. Local Bundle Adjustment for Multi-View Stereo Optimization
3.5. IMU Tightly-Coupled Odometry Calculation
4. Robust Multi-Sensor Fusion Based on a Stochastic Cloning EKF
4.1. IMU Integration
4.2. EKF State Definition and Jacobians
4.3. Treatment of VO Relative State Measurement Using Delayed State Stochastic Cloning
4.4. Update of EKF State Using Absolute State Measurements
5. Results
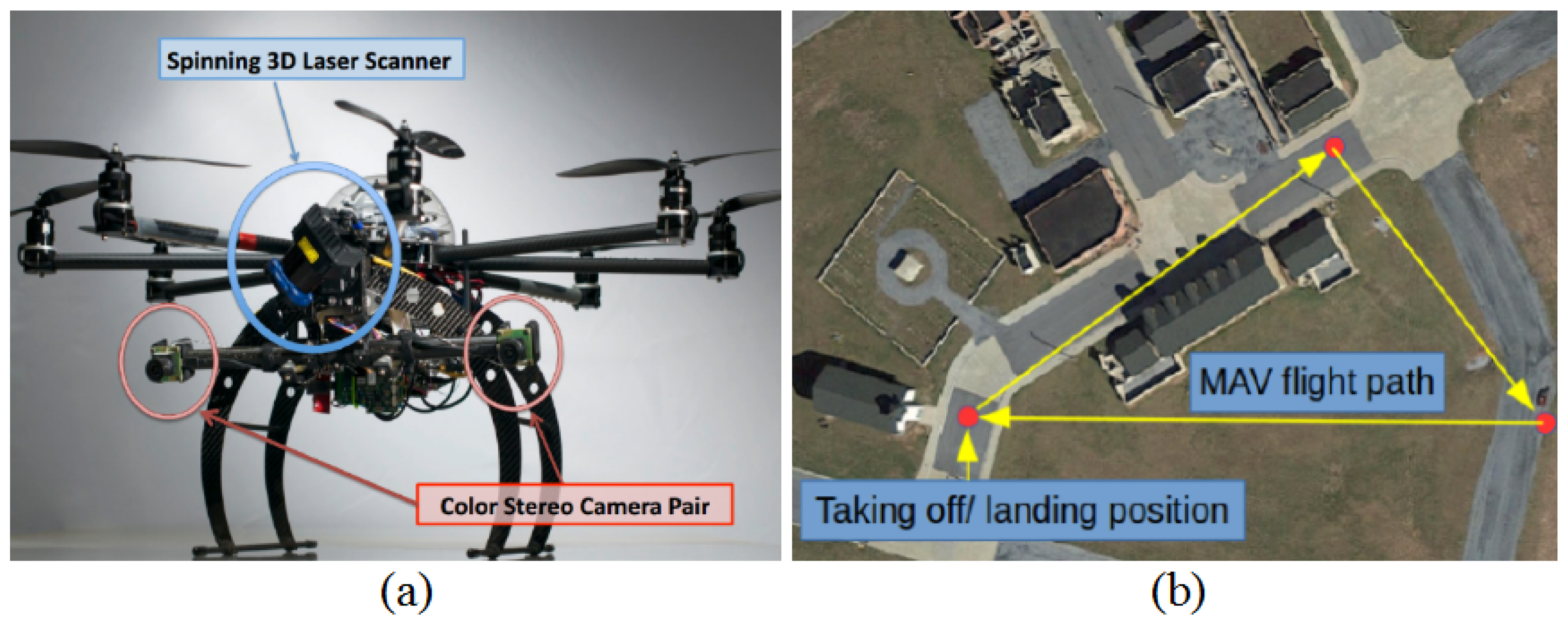
5.1. Experimental System
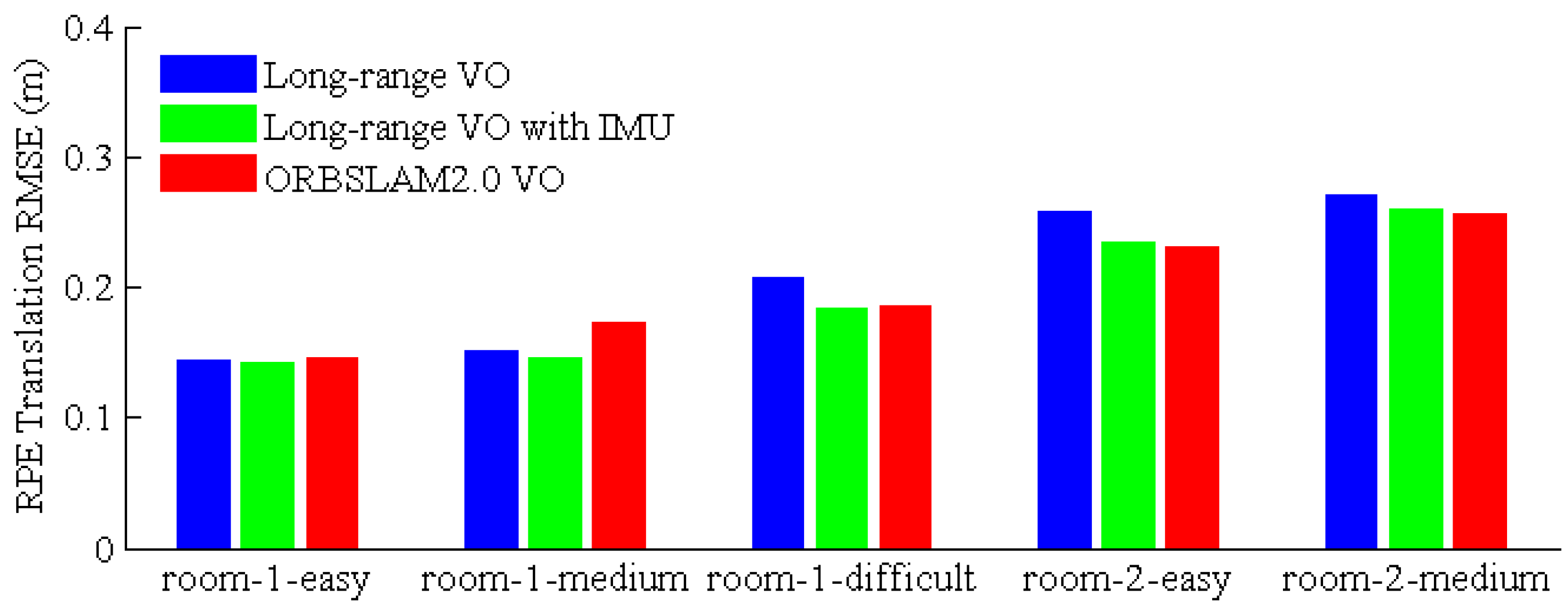
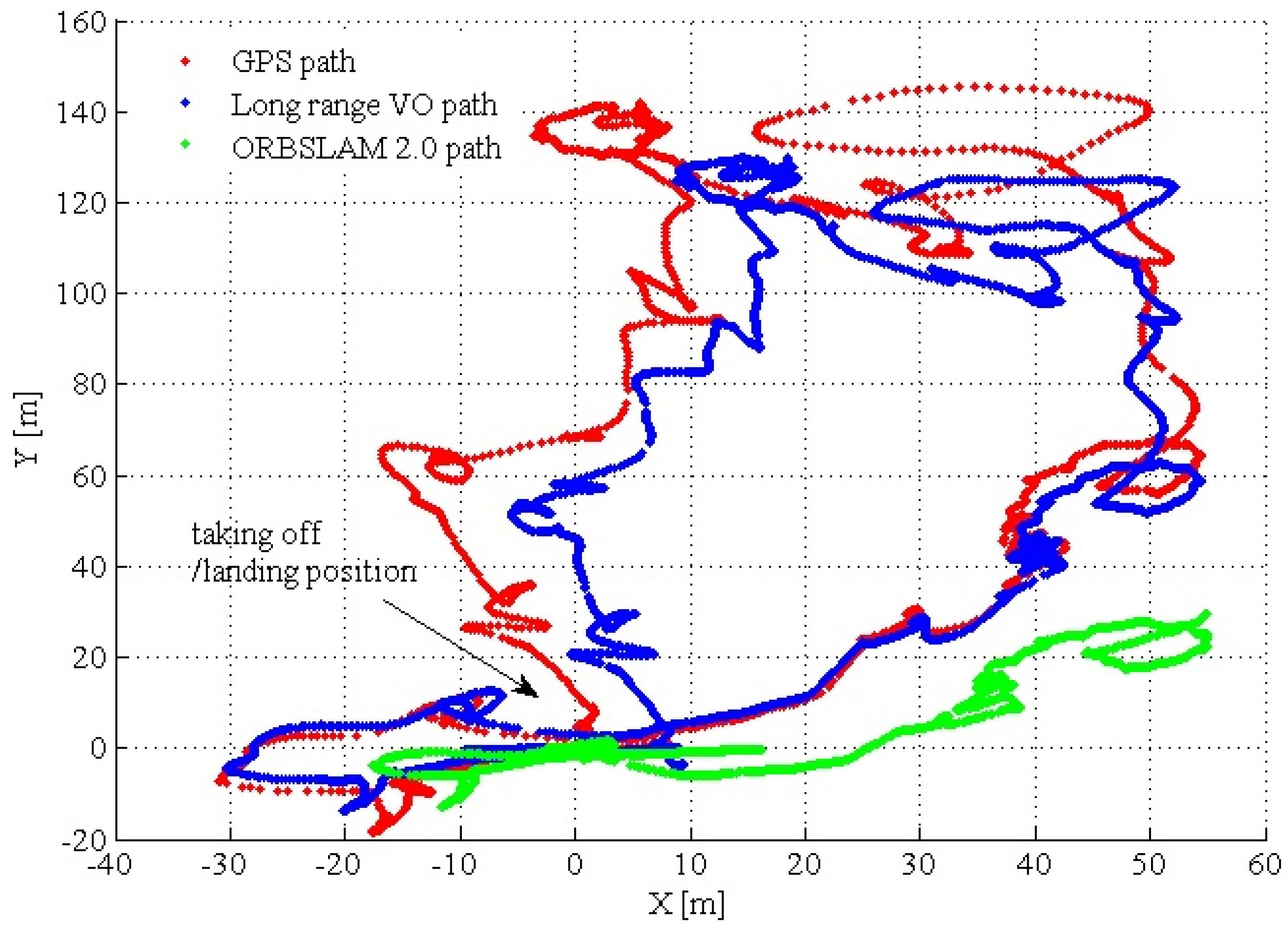
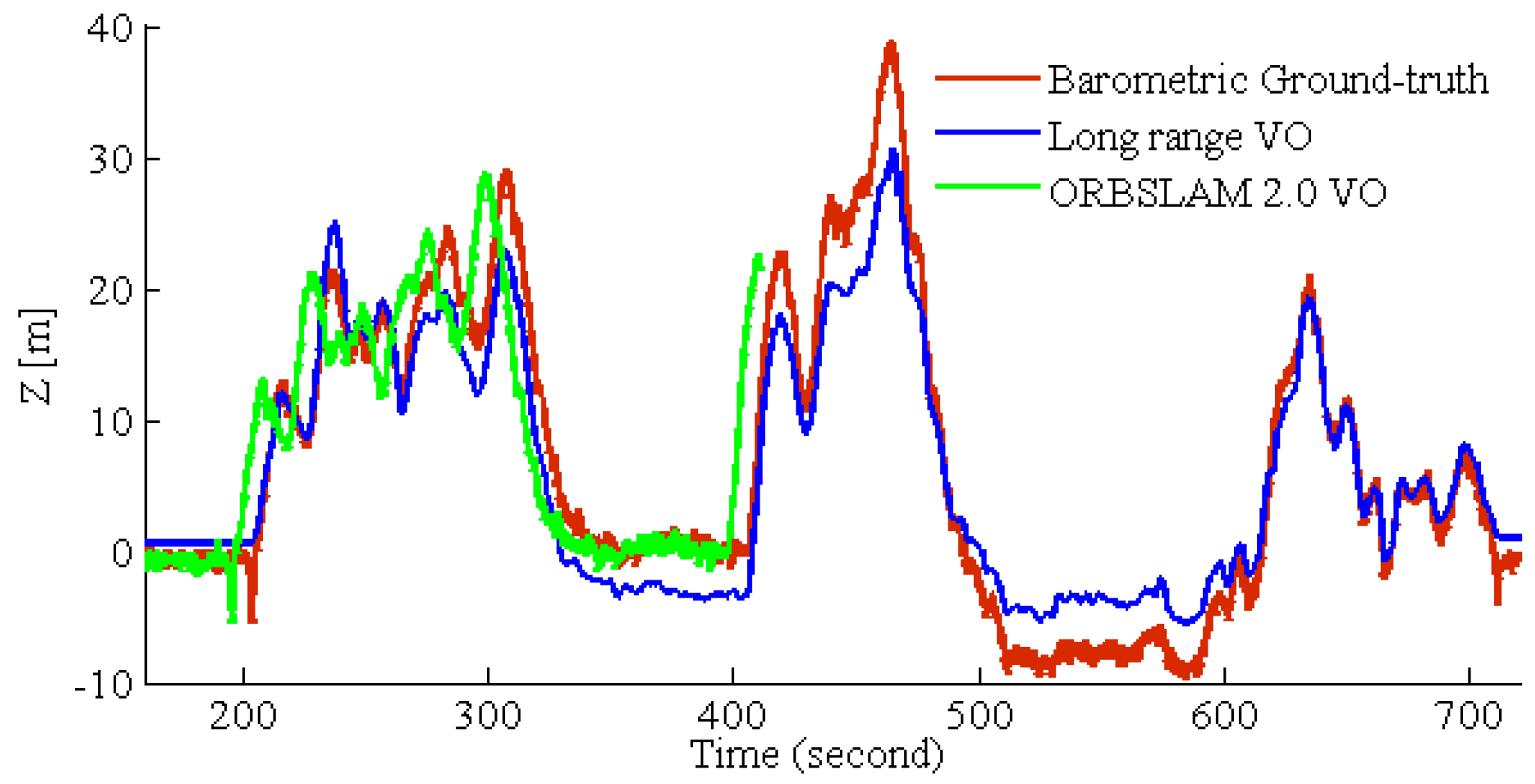
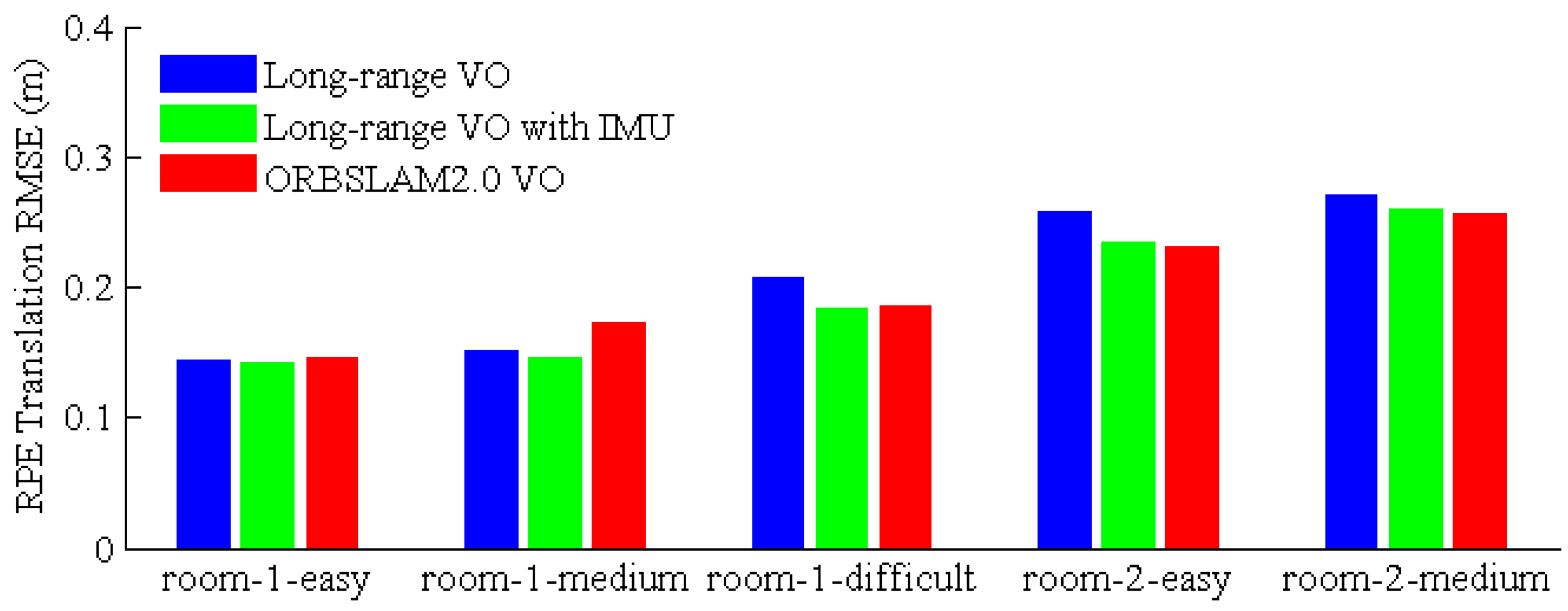
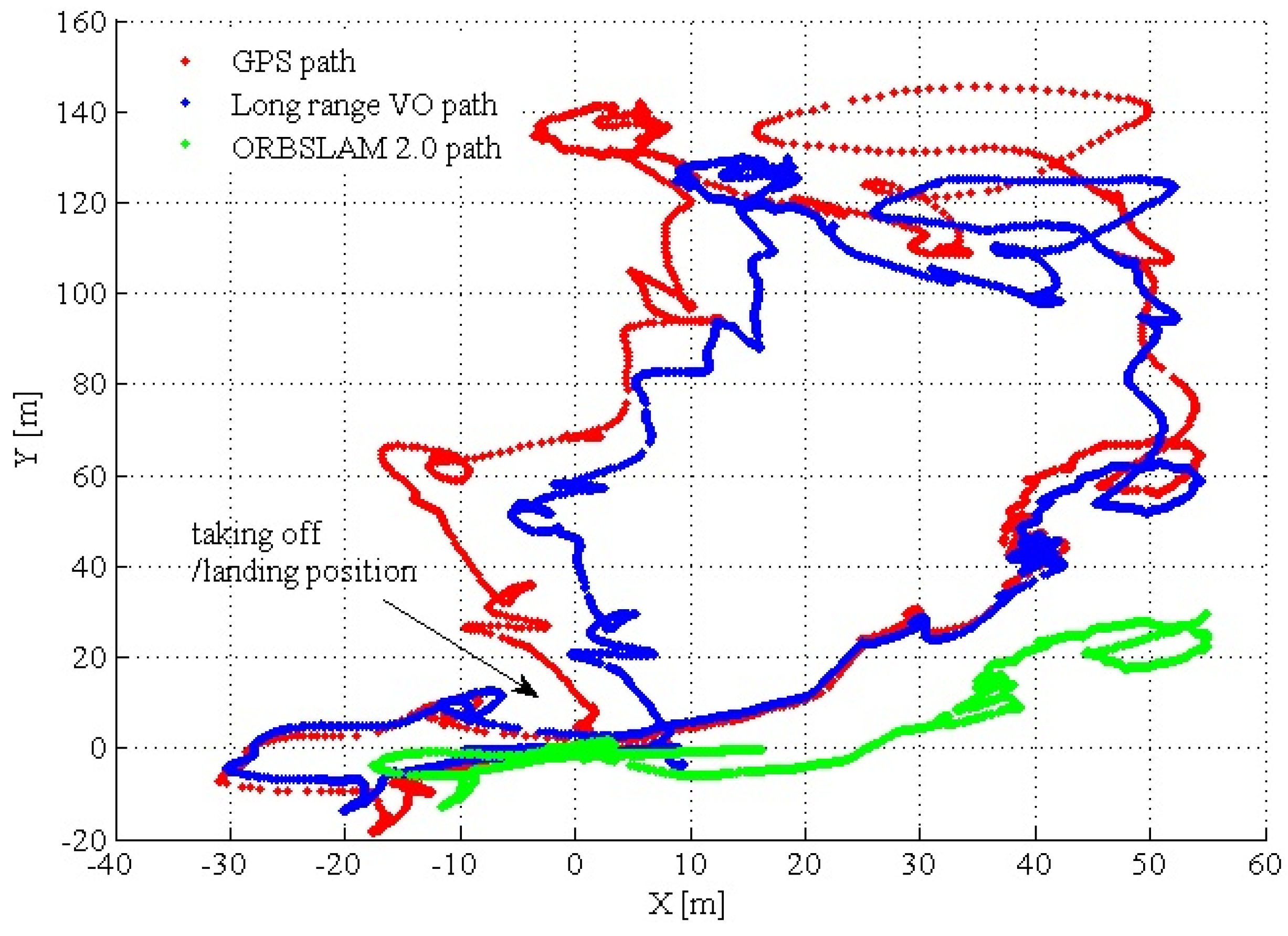
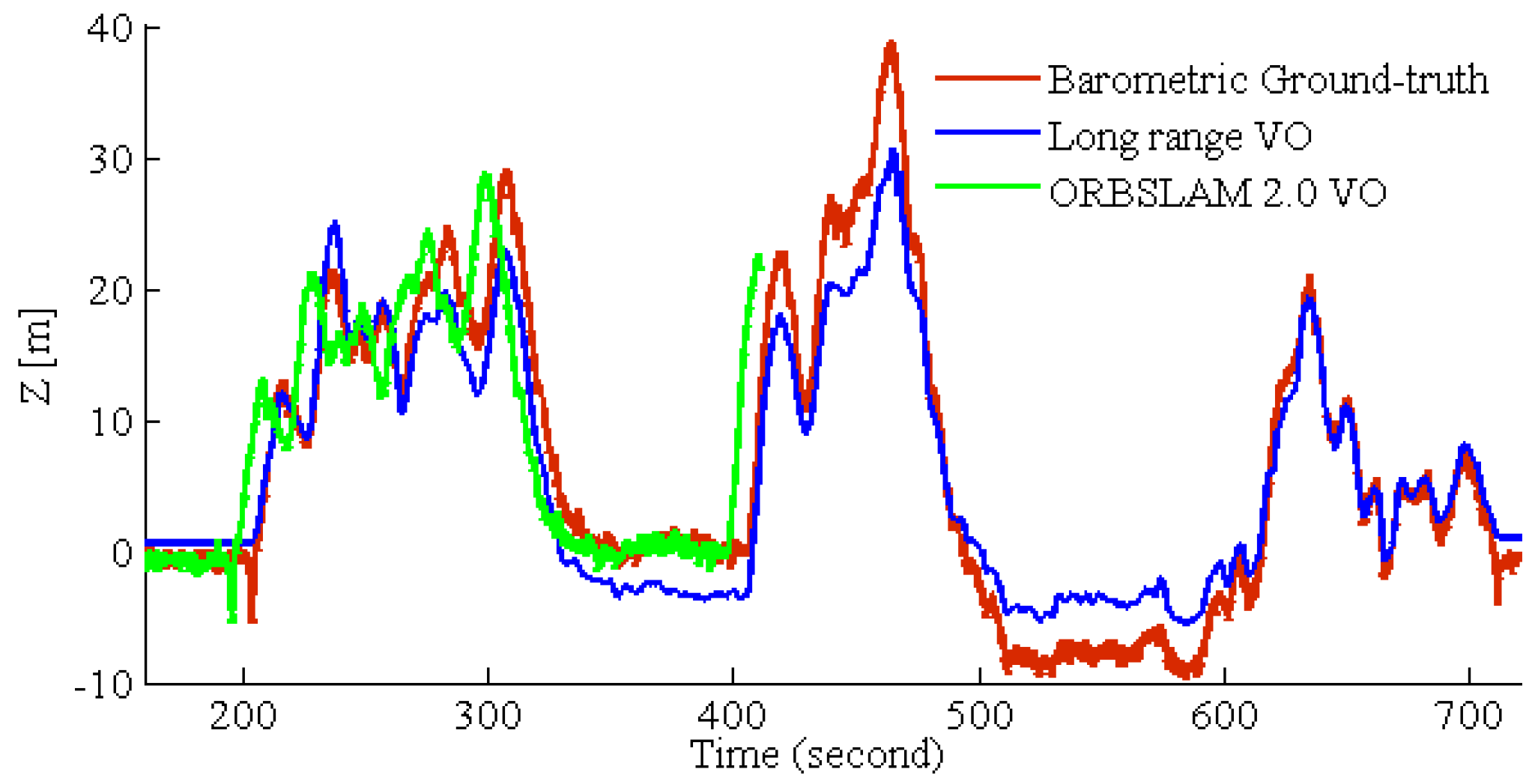
5.2. Performance of IMU Tightly-Coupled Long-Range Stereo Odometry
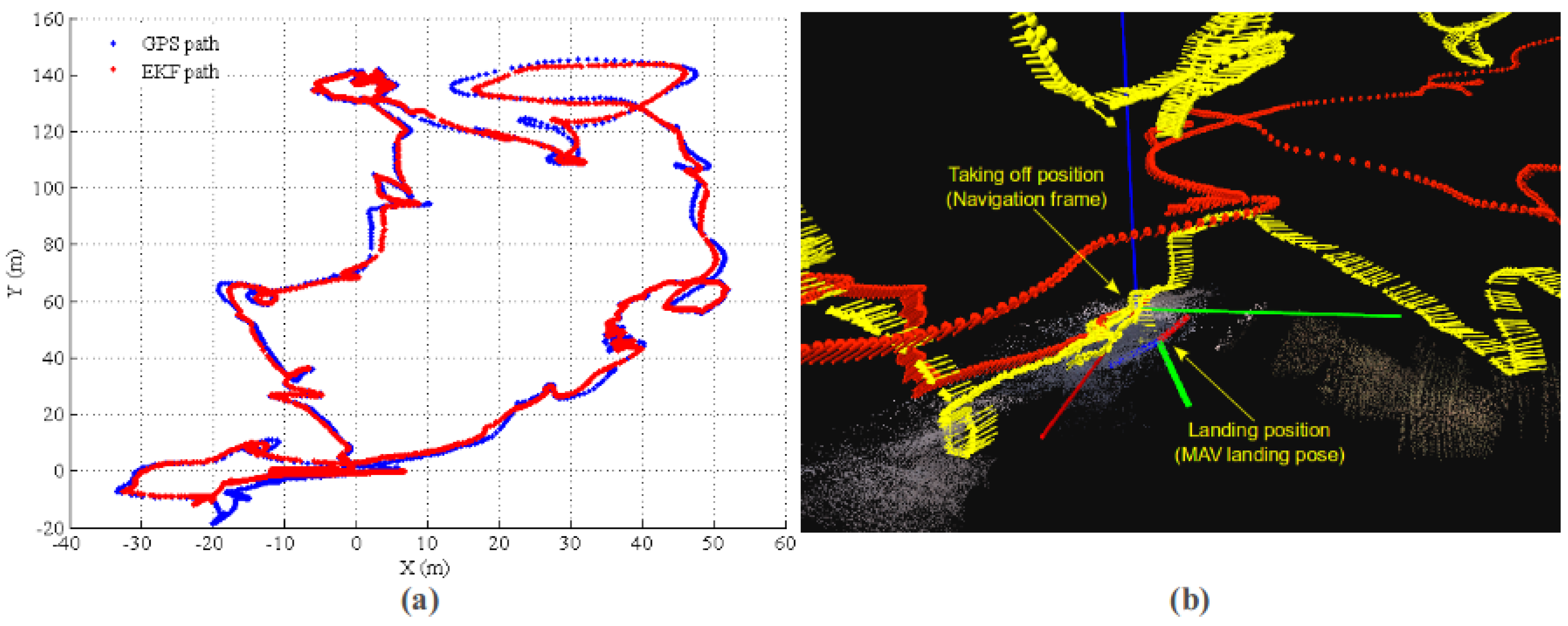
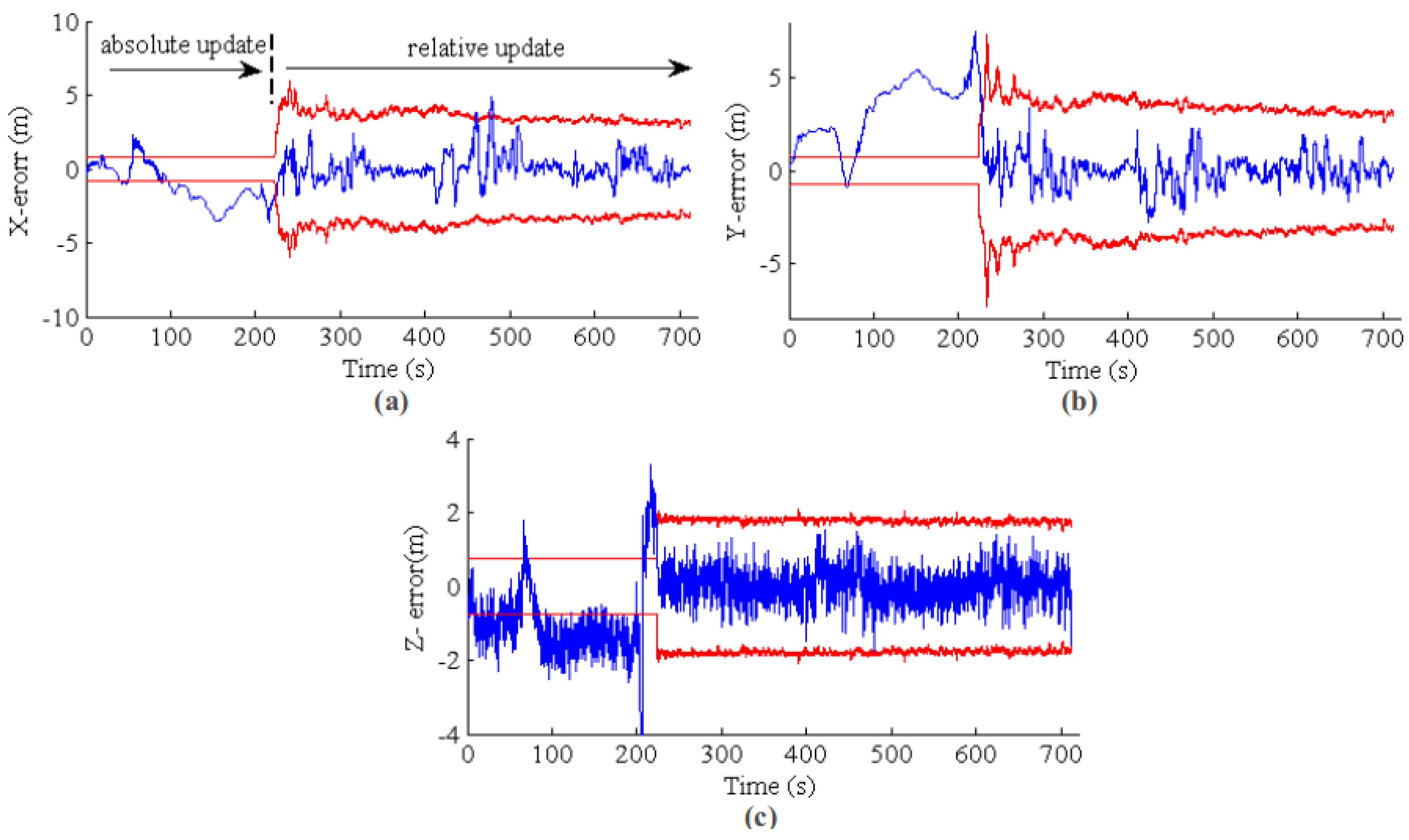
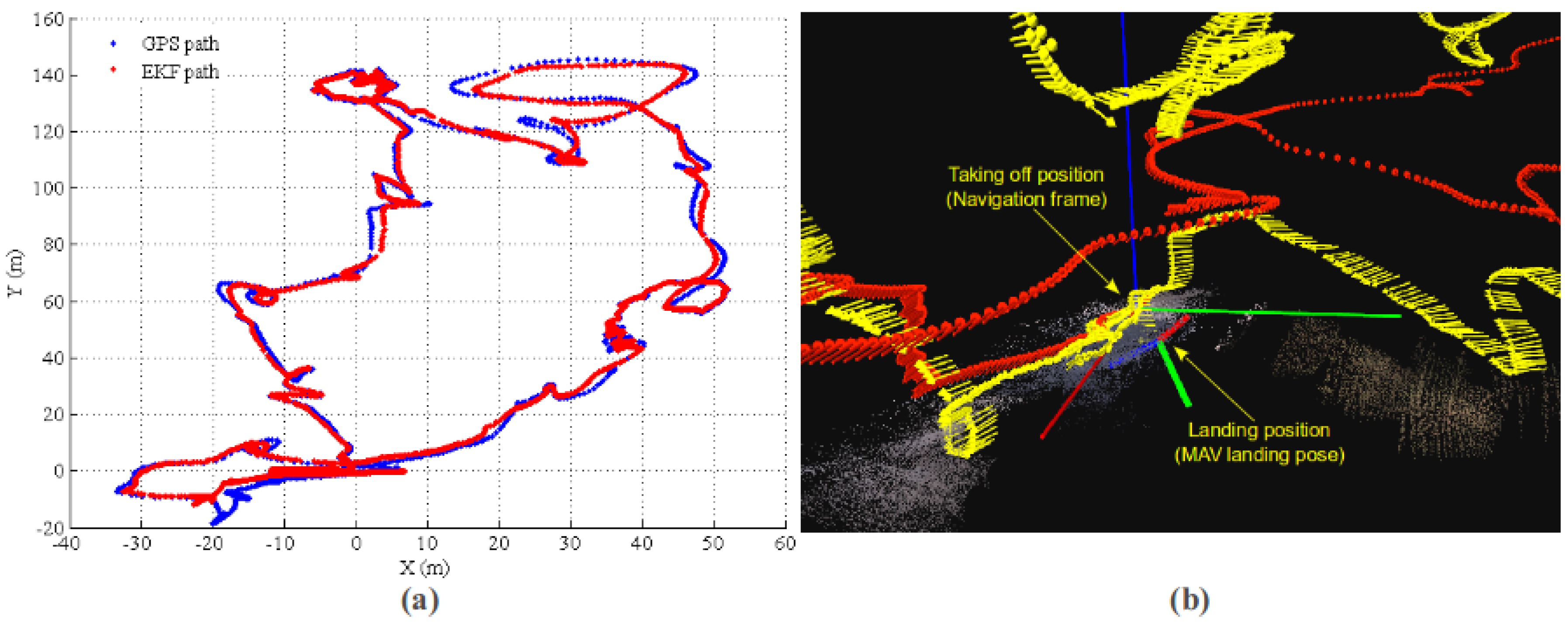
5.3. Performance of Multi-Sensor Fusion State Estimation
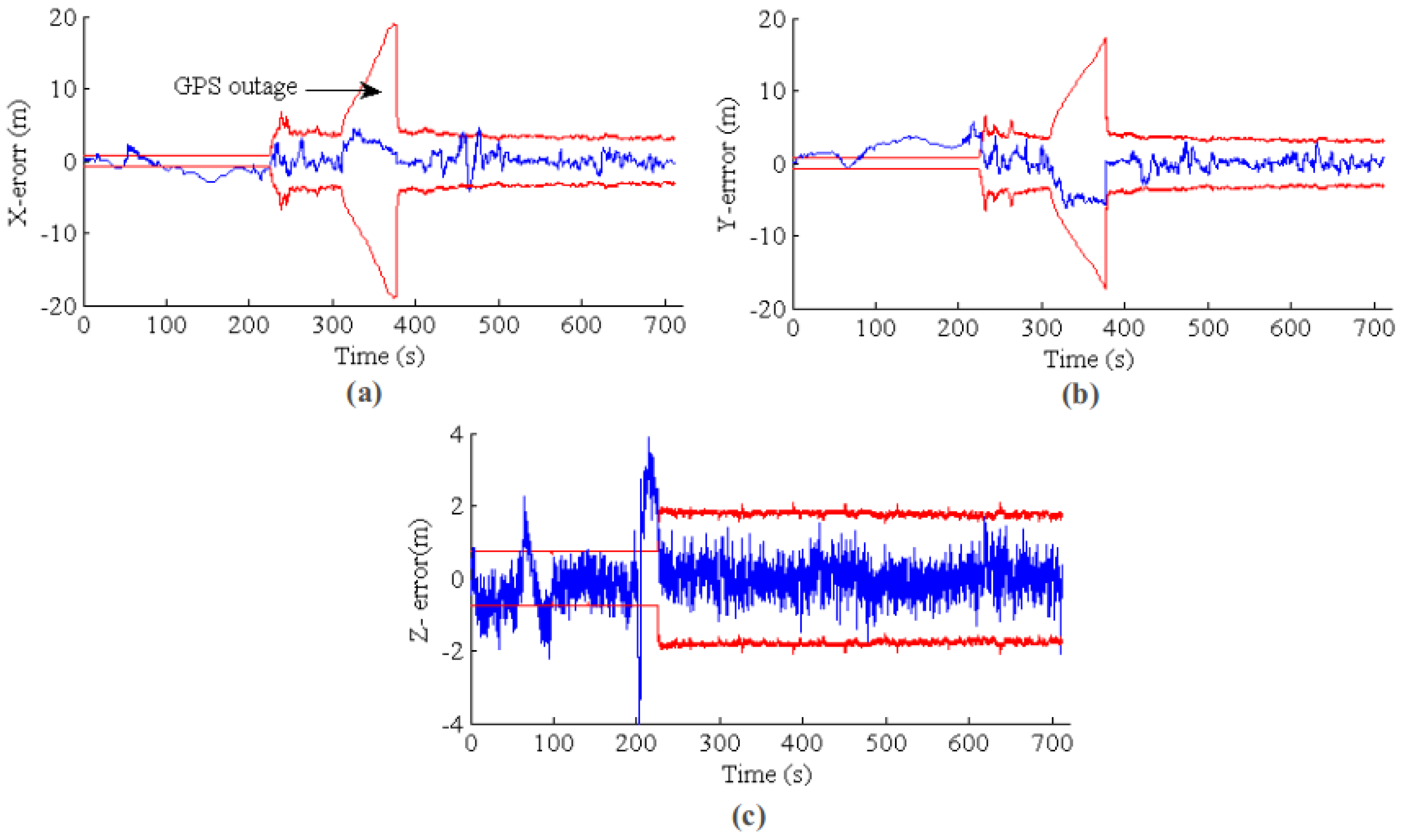
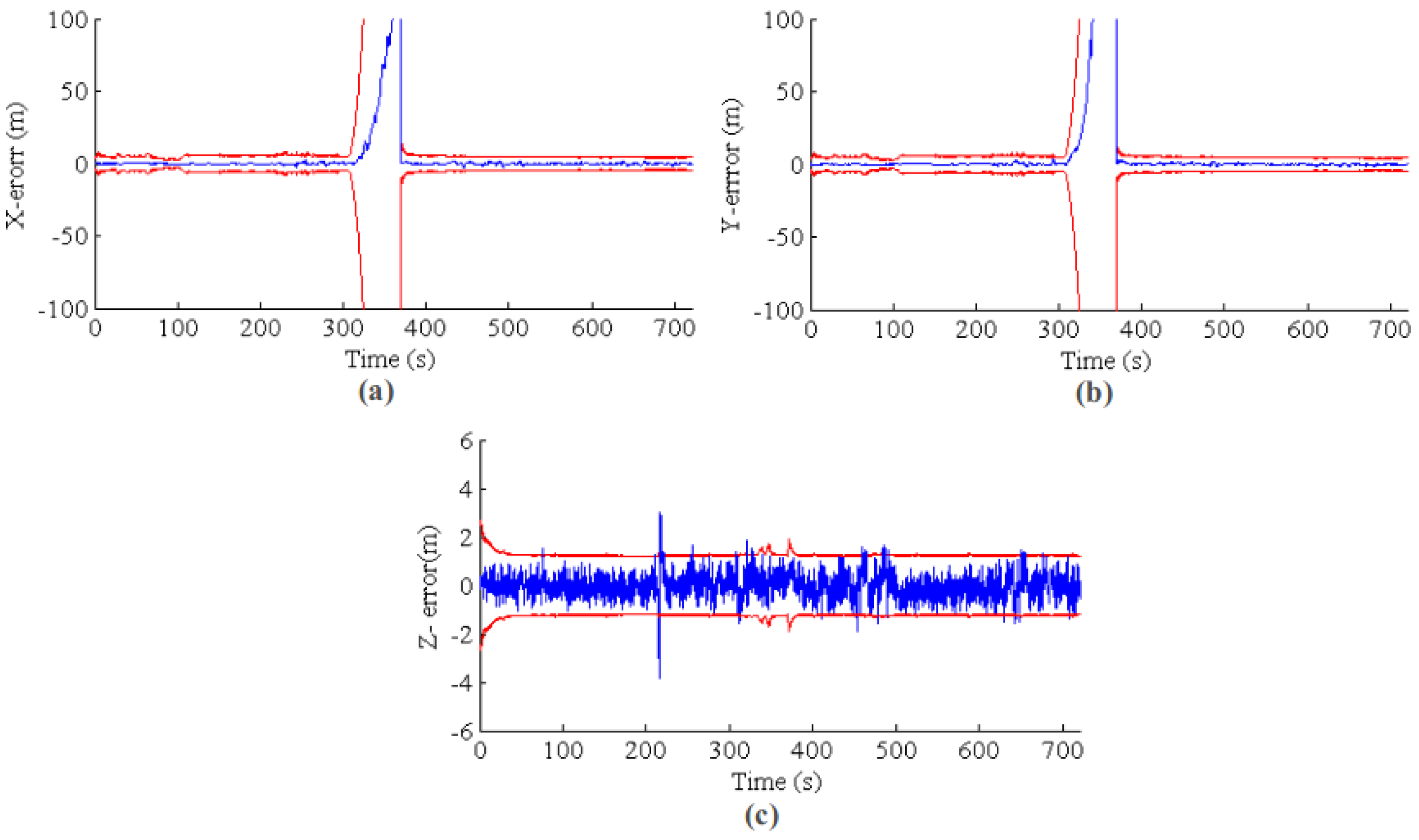
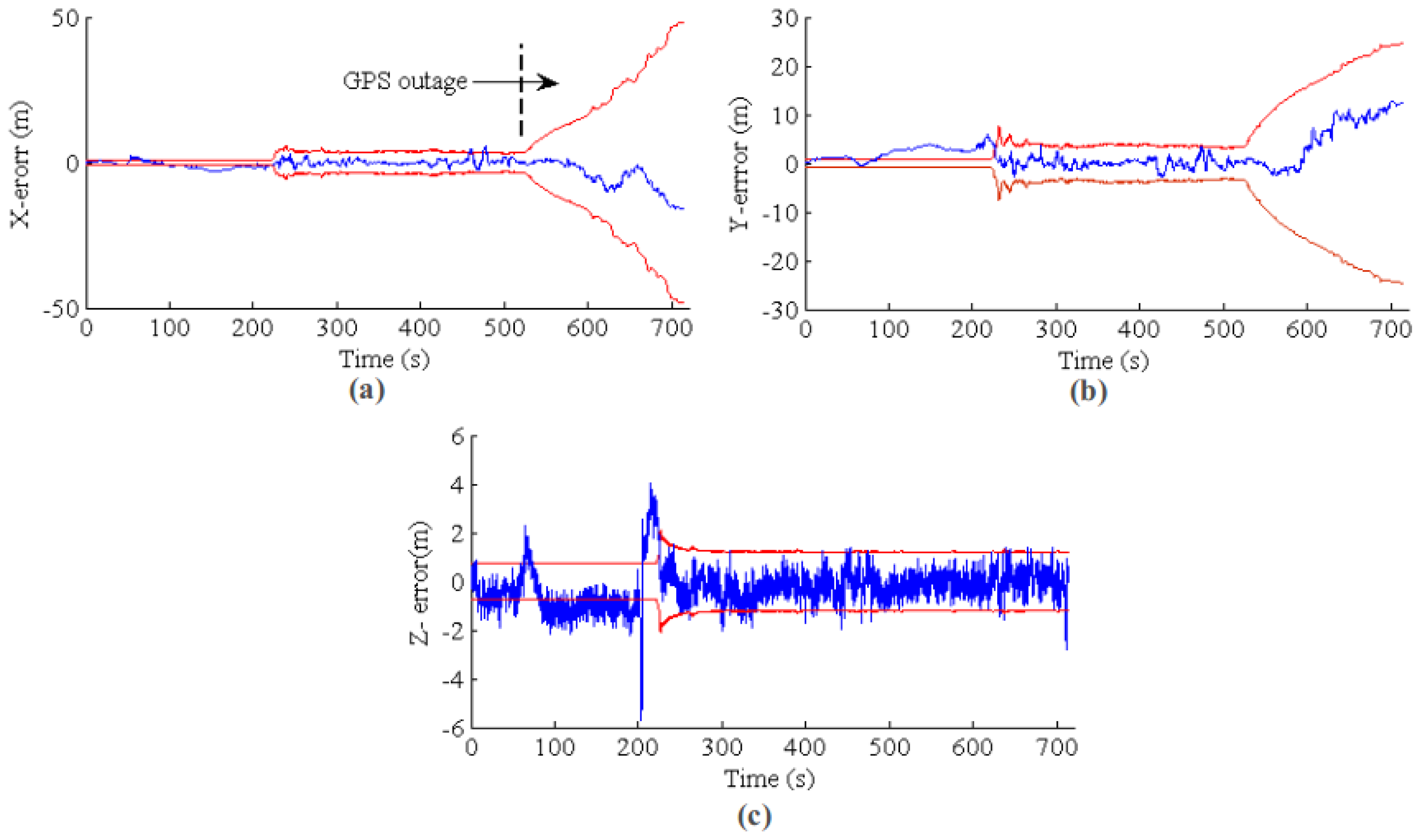
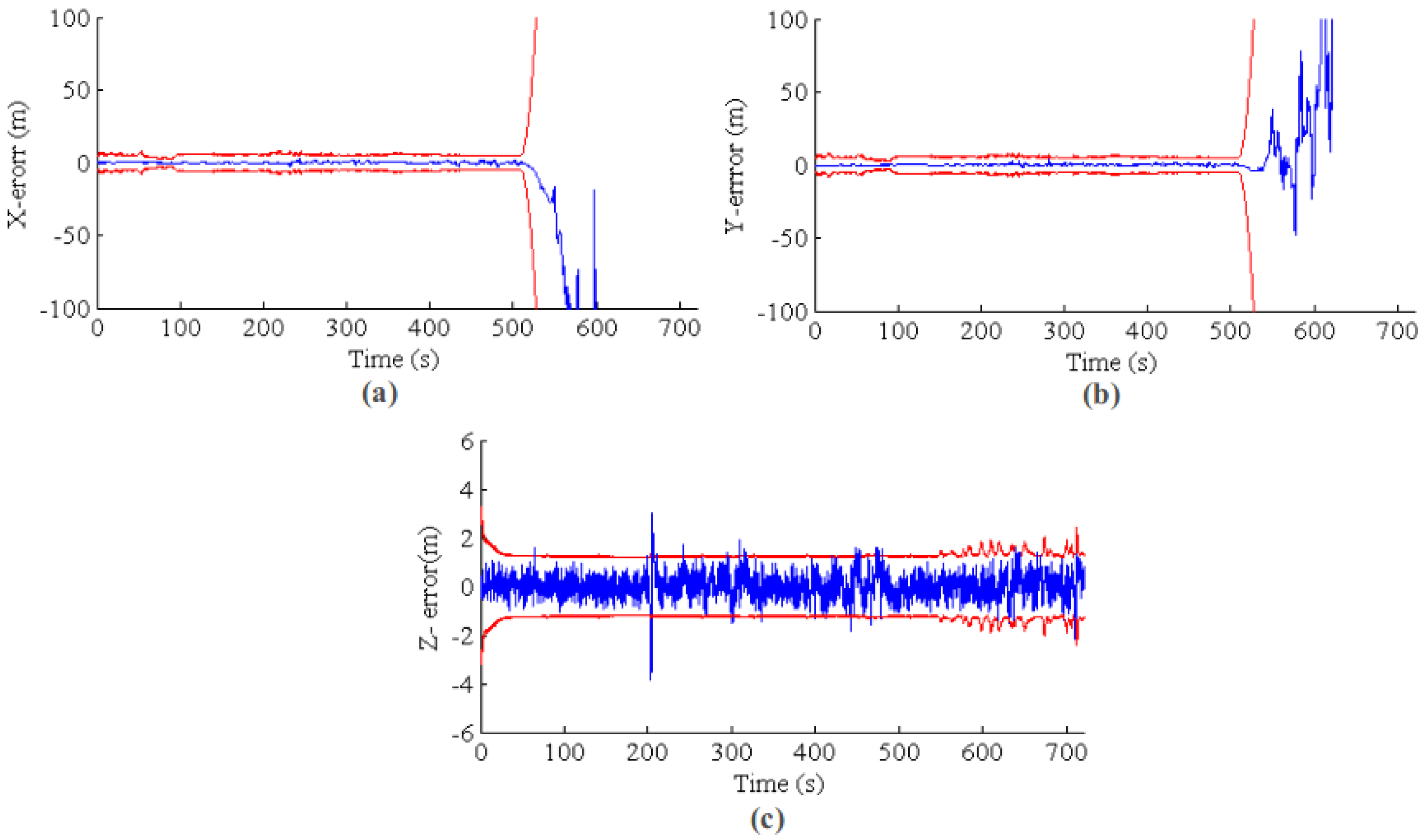
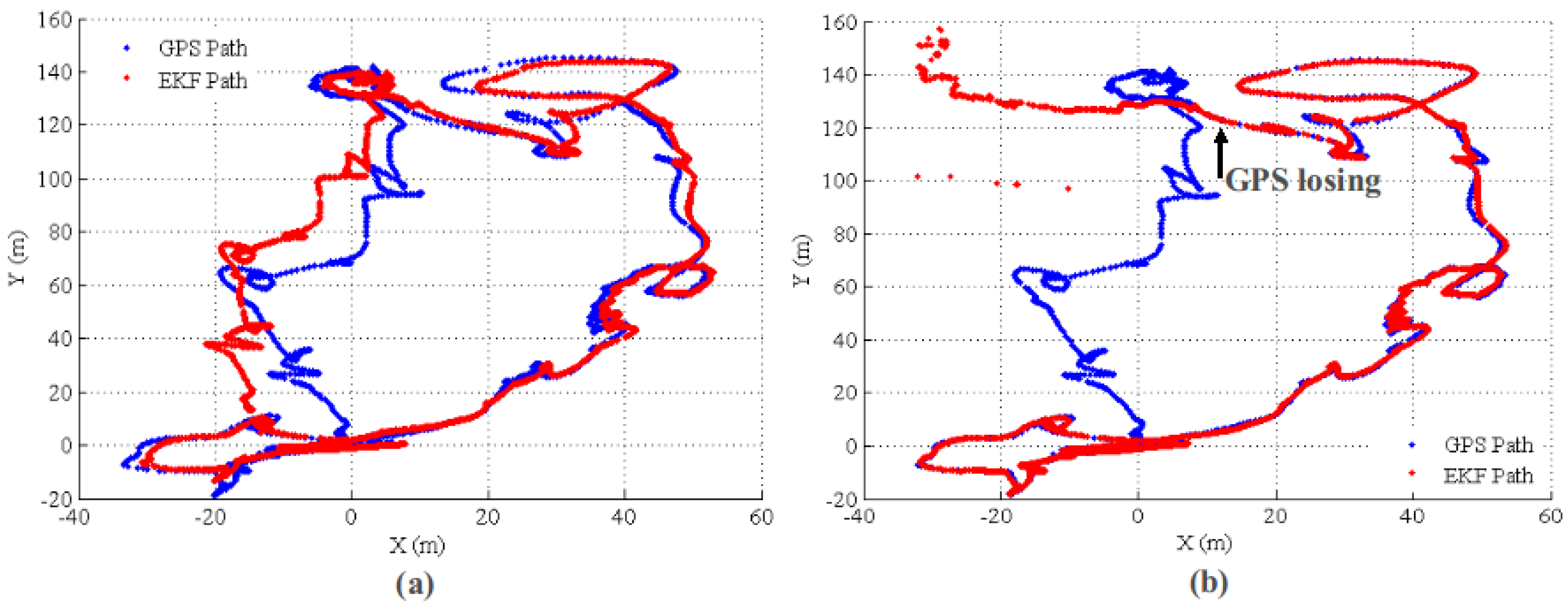
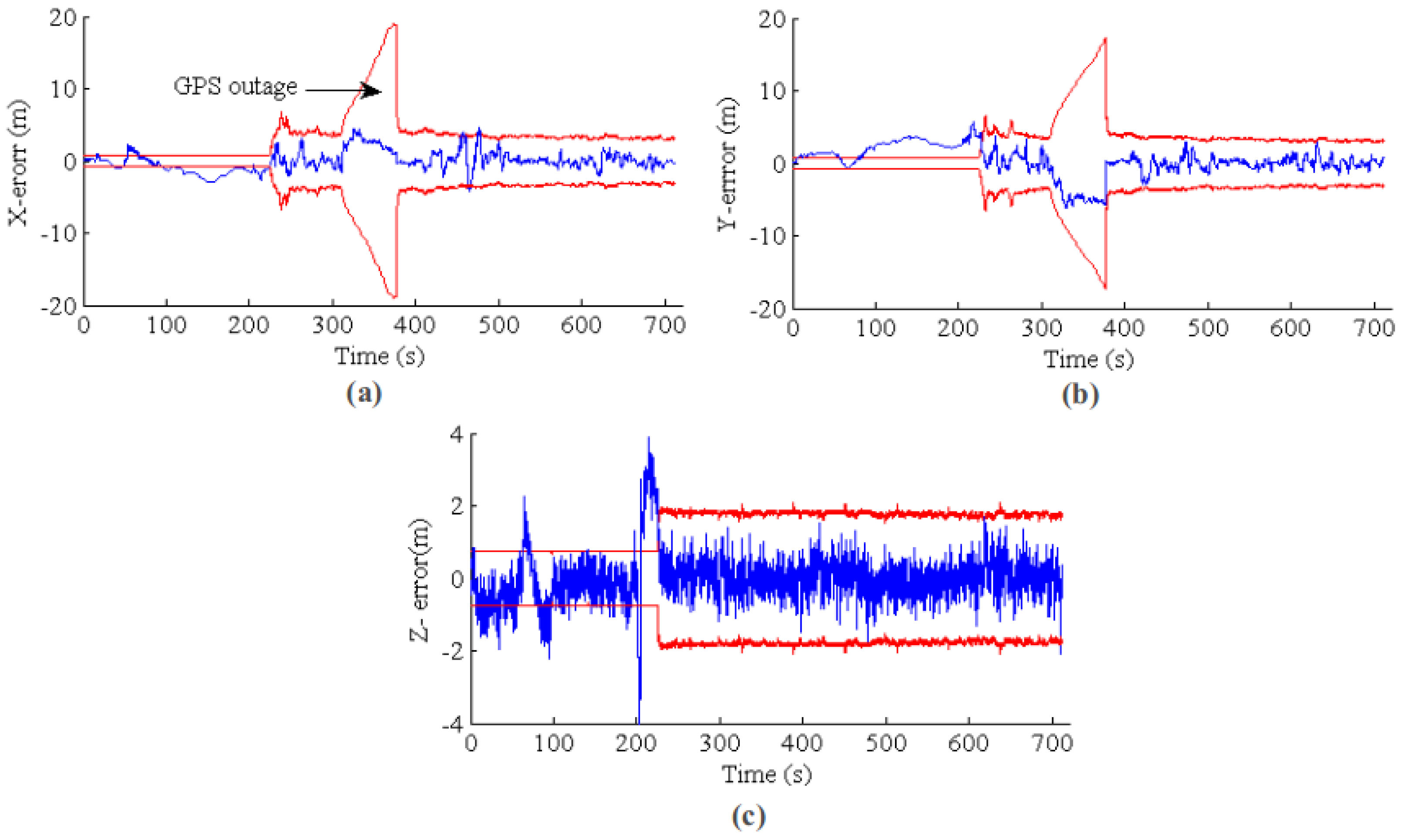
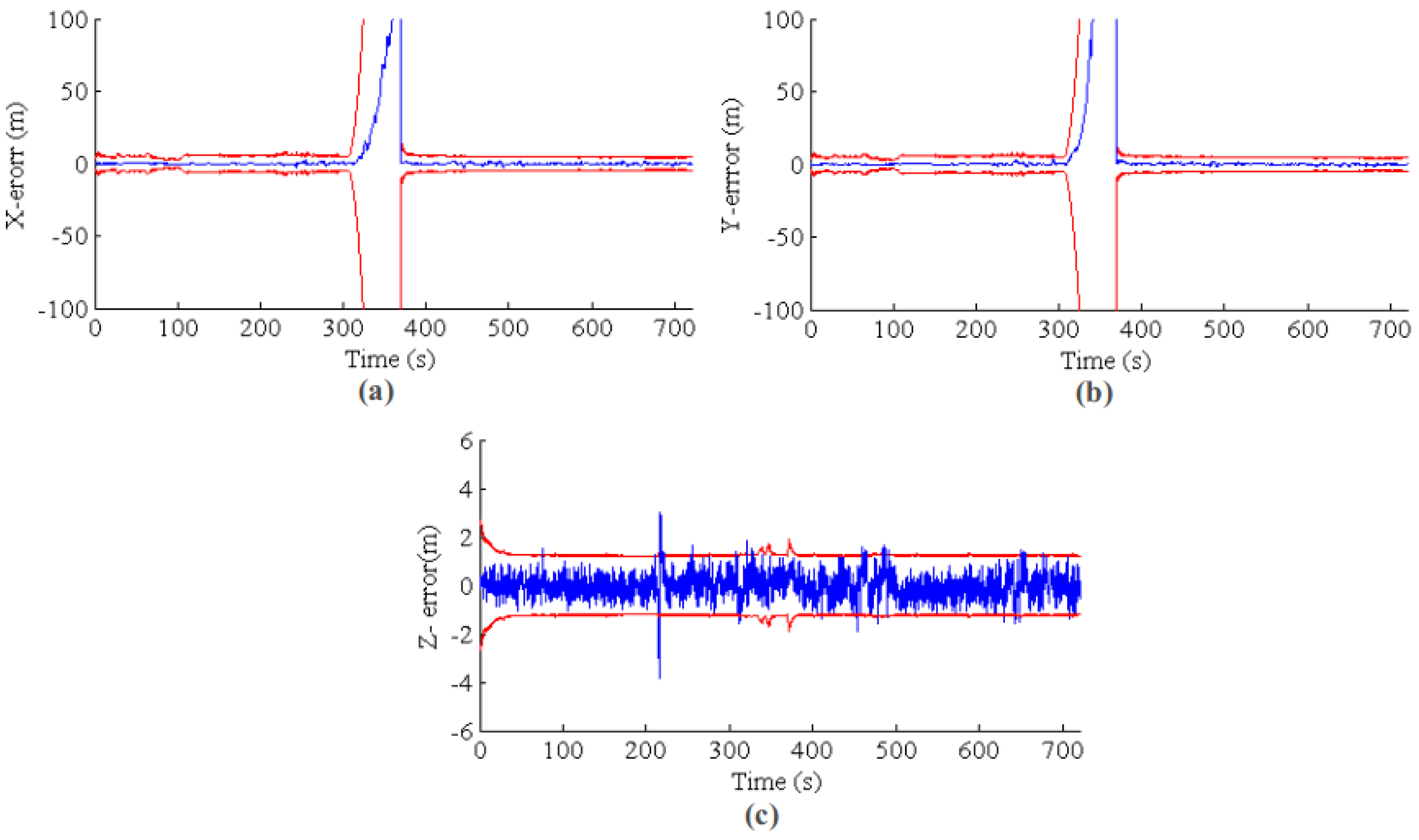
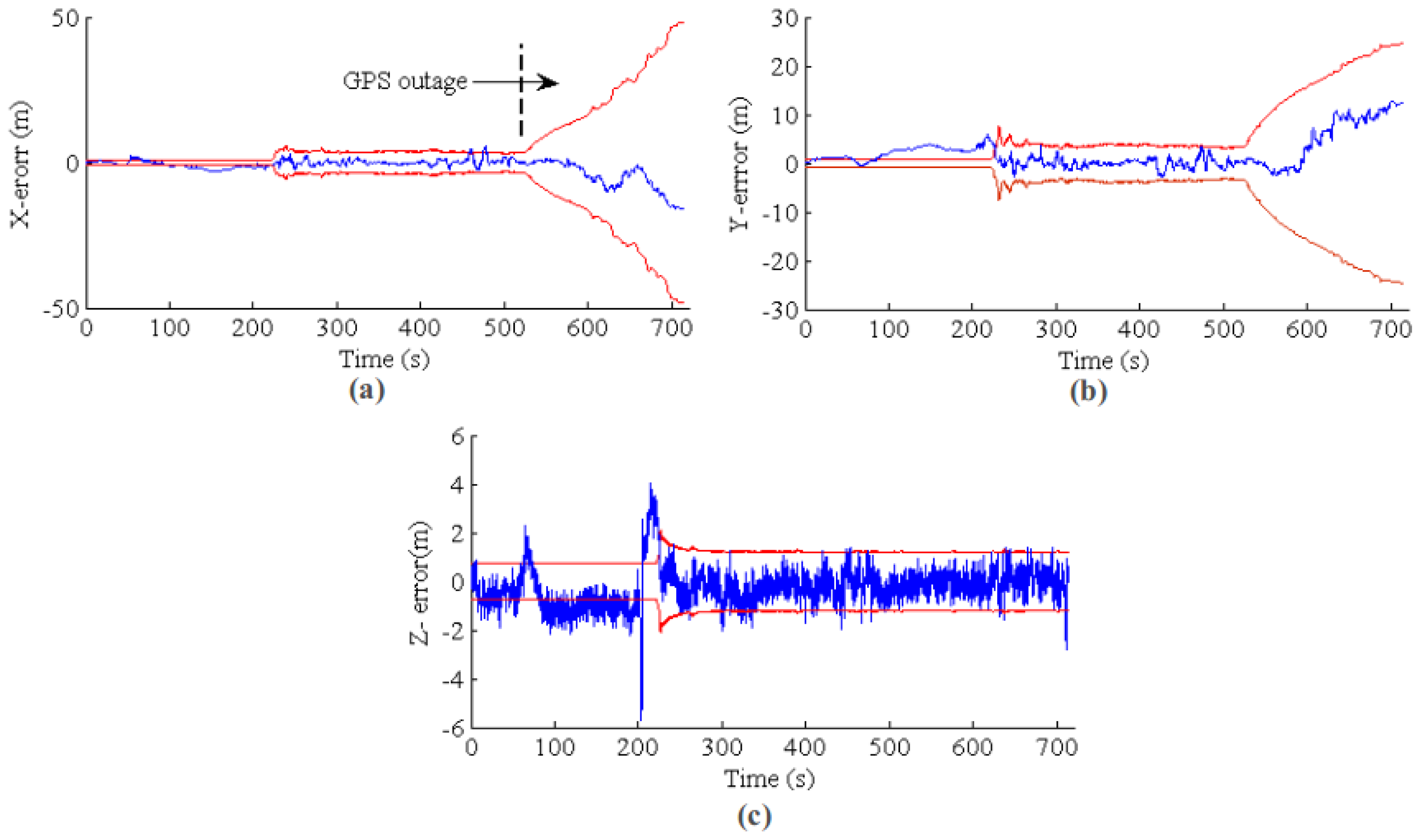
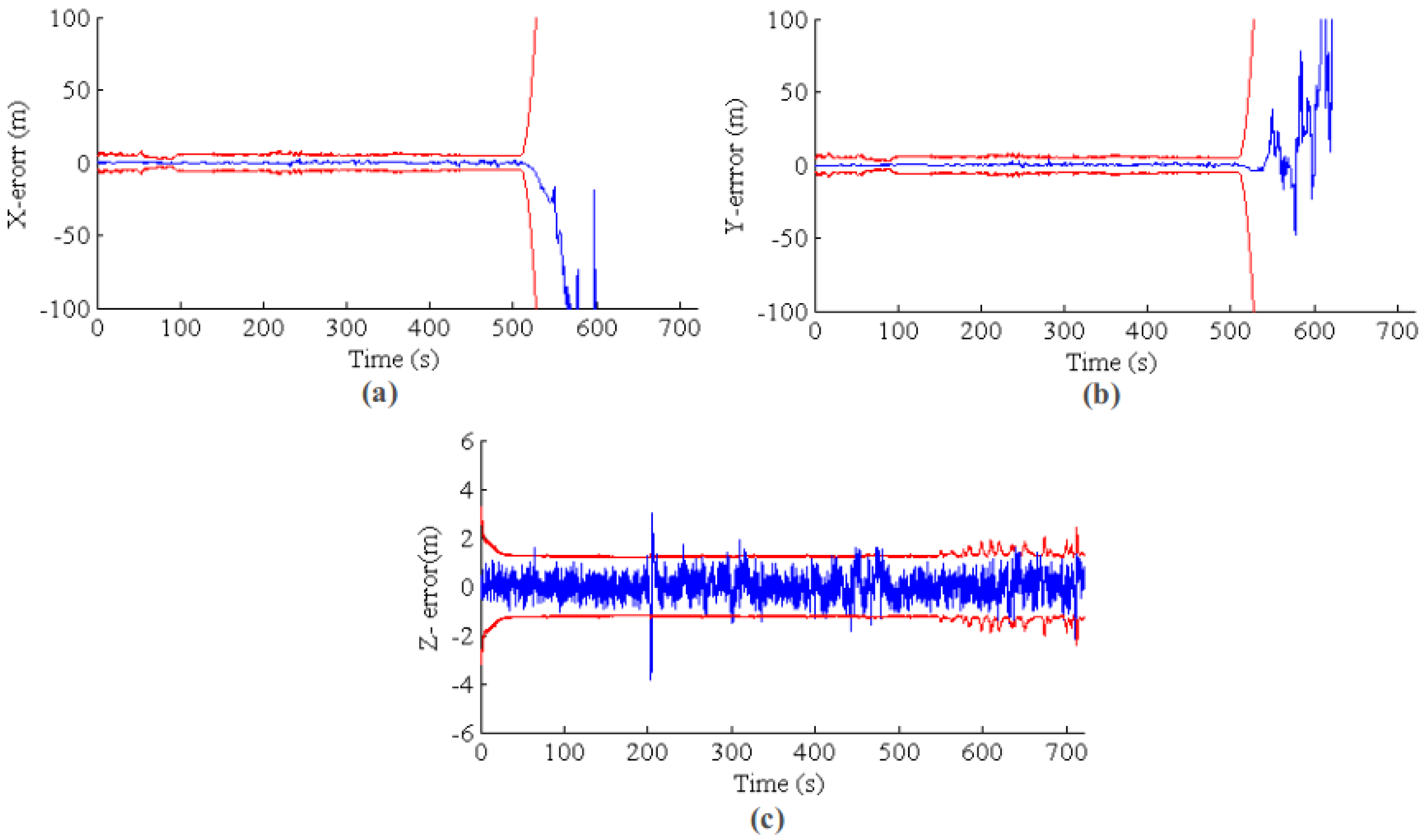
5.4. Performance of GPS Outage Situations
5.5. Performance of Timing
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Warren, M.; Corke, P.; Upcroft, B. Long-range stereo visual odometry for extended altitude flight of unmanned aerial vehicles. Int. J. Robot Res. 2015, 35, 381–403. [Google Scholar] [CrossRef]
- Nister, D.; Naroditsky, O.; Bergen, J. Visual odometry. In Proceedings of the 2004 IEEE International Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; pp. 652–659.
- Klein, G.; Murray, D. Parallel tracking and mapping on a camera phone. In Proceedings of the 2009 IEEE International Symposium on Mixed and Augmented Reality, Orlando, FL, USA, 19–22 October 2009; pp. 83–86.
- Weiss, S.; Achtelik, M.W.; Lynen, S. Monocular vision for long-term micro aerial vehicle state estimation: A compendium. J. Field Robot 2013, 30, 803–831. [Google Scholar] [CrossRef]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast semi-direct monocular visual odometry. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 15–22.
- Engel, J.; Sturm, J.; Cremers, D. Semi-dense visual odometry for a monocular camera. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1449–1456.
- Engel, J.; Schops, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLAM. In Proceedings of the 2014 European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 834–849.
- Artal, R.M.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Kerl, C.; Sturm, J.; Cremers, D. Robust odometry estimation for RGB-D cameras. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3748–3754.
- Fang, Z.; Scherer, S. Experimental study of odometry estimation methods using RGB-D cameras. In Proceedings of the 2014 IEEE/RSI International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 680–687.
- Zhang, J.; Kaess, M.; Singh, S. A real-time method for depth enhanced visual odometry. Auton Robot. 2015, 1–13. [Google Scholar] [CrossRef]
- Geiger, A.; Ziegler, J.; Stiller, C. StereoScan: Dense 3d reconstruction in real-time. In Proceedings of the 2011 IEEE International Symposium on Intelligent Vehicles, Baden, Germany, 5–9 Jun 2011; pp. 963–968.
- Huang, A.S.; Henry, P.; Fox, D. Visual odometry and mapping for autonomous flight using an RGB-D camera. In Proceedings of the 2011 International Symposium of Robotics Research, Flagstaff, AZ, USA, 28 August– 1 September 2011; pp. 235–252.
- Pire, T.; Fischer, T.; Civera, J. Stereo parallel tracking and mapping for robot localization. In Proceedings of the 2015 IEEE/RSI International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1373–1378.
- Engel, J.; Stueckler, J.; Cremers, D. Large-scale direct SLAM with stereo cameras. In Proceedings of the 2015 IEEE/RSI International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1935–1942.
- Cvisic, I.; Petrovic, I. Stereo odometry based on careful feature selection and tracking. In Proceedings of the 2015 European Conference on Mobile Robots, Lincoln, UK, 2–4 September 2015; pp. 1–5.
- Kuemmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. G2o: A general framework for graph optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613.
- Kaess, M.; Johannsson, H.; Roberts, R. iSAM2: Incremental smoothing and mapping using the Bayes tree. Int. J. Robot Res. 2012, 31, 216–235. [Google Scholar] [CrossRef] [Green Version]
- Weiss, S. Vision Based Navigation for Micro Helicopters. Ph.D. Thesis, Eidgenössische Technische Hochschule (ETH), Zurich, Switzerland, 2012. [Google Scholar]
- Chambers, A.; Scherer, S.; Yoder, L.; Jain, S.; Nuske, S.; Singh, S. Robust multi-Sensor Fusion for micro aerial vehicle navigation in GPS-degraded/denied environments. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1892–1899.
- Mourikis, A.; Roumeliotis, S. On the treatment of relative-pose measurements for mobile robot localization. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 2277–2284.
- Tardif, J.; George, M.; Laverne, M.; Kelly, A. A new approach to vision-aided inertial navigation. In Proceedings of the 2010 IEEE/RSI International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4161–4168.
- Li, M.Y. High-precision, consistent EKF-based visual-inertial odometry. Int. J. Robot Res. 2012, 32, 690–711. [Google Scholar] [CrossRef]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual-inertial slam using nonlinear optimization. Int. J. Robot Res. 2014, 34, 314–334. [Google Scholar] [CrossRef]
- Forster, C.; Carloney, L.; Dellaerty, F.; Scaramuzza, D. IMU preintegration on manifold for efficient visualinertial maximum-a-posteriori estimation. In Proceedings of the 2015 Robotics: Science and Systems, Rome, Italy, 13–17 July 2015; pp. 1–20.
- Strasdat, H. Local Accuracy and Global Consistency for Efficient Visual SLAM. Ph.D. Thesis, Imperial College London, London, UK, 2012. [Google Scholar]
- Microstrain 3DM-GX3-35. LORD MicroStrain Ltd. Available online: http://www.microstrain.com/inertia/3dm-gx3-35 (accessed on 20 December 2016).
- VICON. Vicon Motion Systems Ltd. Available online: http://www.vicon.com (accessed on 20 December 2016).
- Burri, M.; Nikolic, J.; Gohl, P.; Schneider, T.; Rehder, J.; Omari, S.; Achtelik, M.; Siegwart, R. The EuRoC micro aerial vehicle datasets. Int. J. Robot Res. 2016, 35, 1157–1163. [Google Scholar] [CrossRef]
- NVIDIA Jetson TX1. Nvidia Ltd. Available online: http://www.nvidia.com/object/jetson-tx1-module.html (accessed on 20 December 2016).
- Odroid XU4. Hardkernel Ltd. Available online: http://www.hardkernel.com/main/main.php (accessed on 20 December 2016).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | RSME x | RMSE y | RMSE z |
|---|---|---|---|
| Long-range VO | 1.4936 | 3.0465 | 2.2860 |
| ORBSLAM 2.0 VO | 5.0012 | 21.1514 | 3.3277 |
| Long-range VO | 5.8547 | 7.6728 | 4.5409 |
| Method | RSME x | RMSE y | RMSE z |
|---|---|---|---|
| EKF (300 s to 360 s, GPS lost) | 1.3782 | 2.2670 | 0.5859 |
| EKF without VO (300 s to 360 s, GPS lost) | 19.8595 | 66.4899 | 0.6047 |
| EKF (500 s to 720 s, GPS lost) | 3.5654 | 3.8767 | 0.5535 |
| EKF without VO (500 s to 720 s, GPS lost) | 595.9539 | 141.5476 | 0.5973 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Nuske, S.; Scherer, S. A Multi-Sensor Fusion MAV State Estimation from Long-Range Stereo, IMU, GPS and Barometric Sensors. Sensors 2017, 17, 11. https://doi.org/10.3390/s17010011
Song Y, Nuske S, Scherer S. A Multi-Sensor Fusion MAV State Estimation from Long-Range Stereo, IMU, GPS and Barometric Sensors. Sensors. 2017; 17(1):11. https://doi.org/10.3390/s17010011
Chicago/Turabian StyleSong, Yu, Stephen Nuske, and Sebastian Scherer. 2017. "A Multi-Sensor Fusion MAV State Estimation from Long-Range Stereo, IMU, GPS and Barometric Sensors" Sensors 17, no. 1: 11. https://doi.org/10.3390/s17010011