
Sediment Sampling in Estuarine Mudflats with an Aerial-Ground Robotic Team


 , , ,
, , ,  ,
, 
 ,
,  and
and
Abstract
:1. Introduction
2. Related Work
3. Experimental Protocol for Robotic Sampling of Estuarine Mudflats
3.1. Case Study
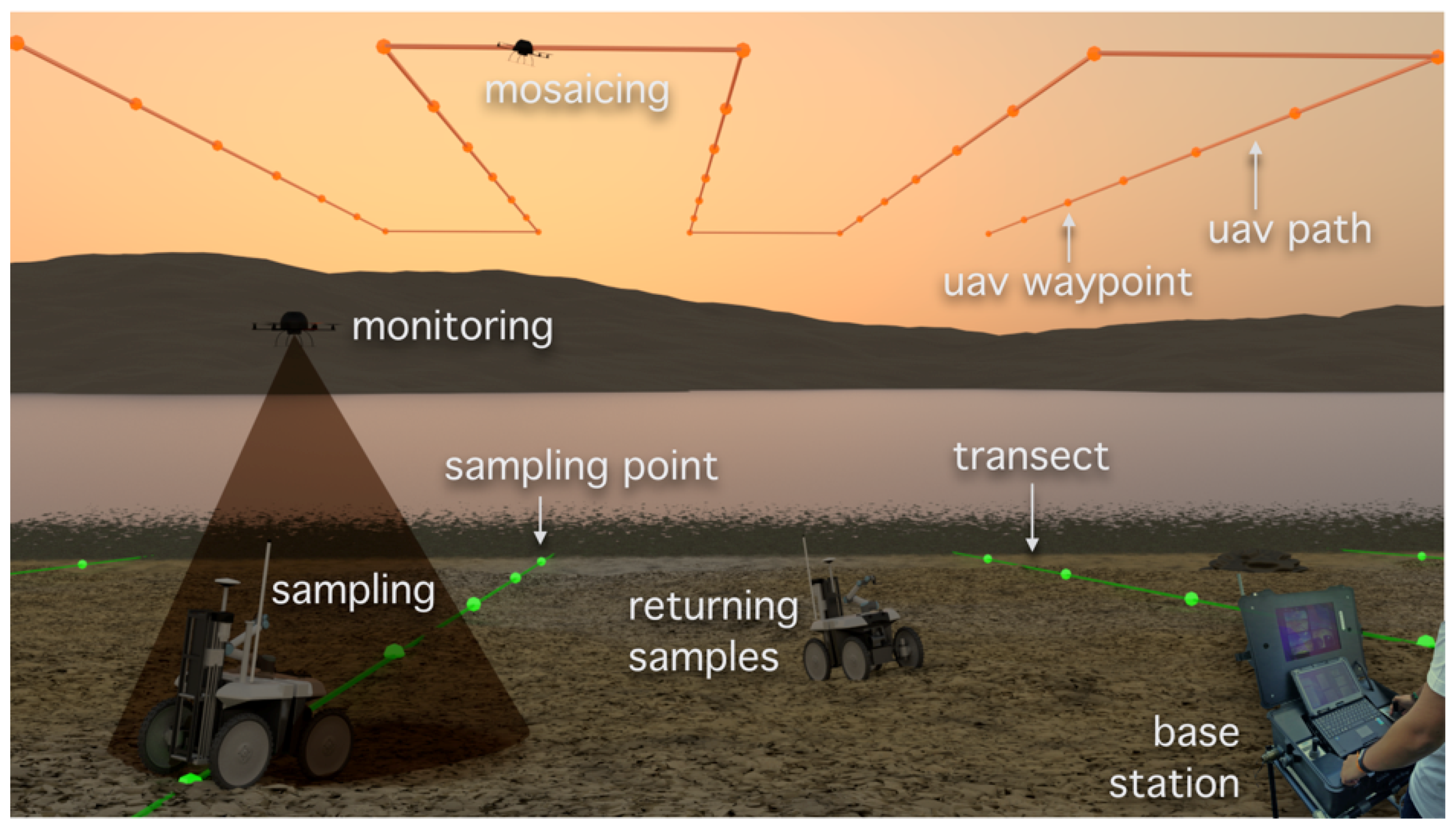
3.2. Mission Workflow
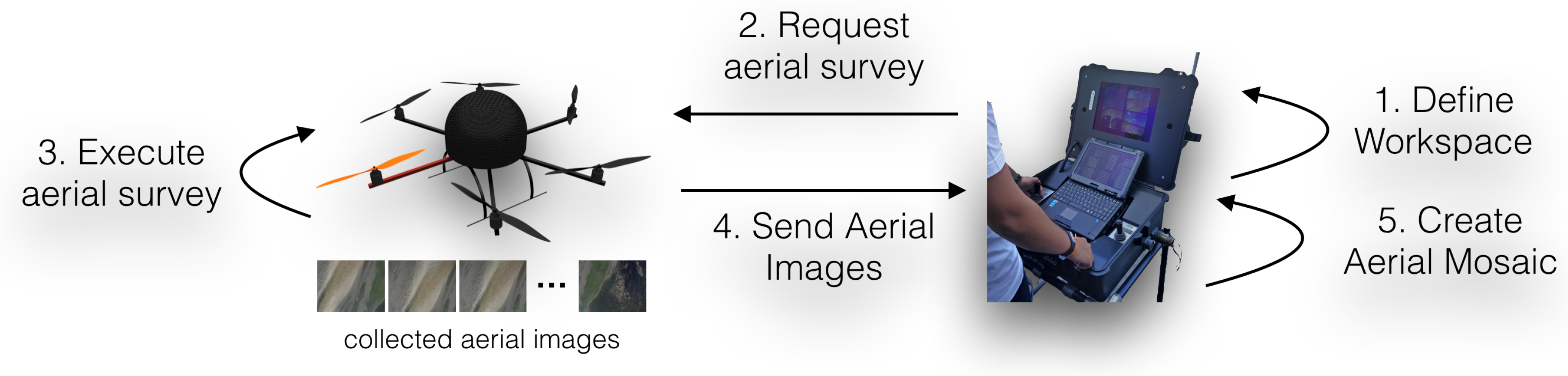
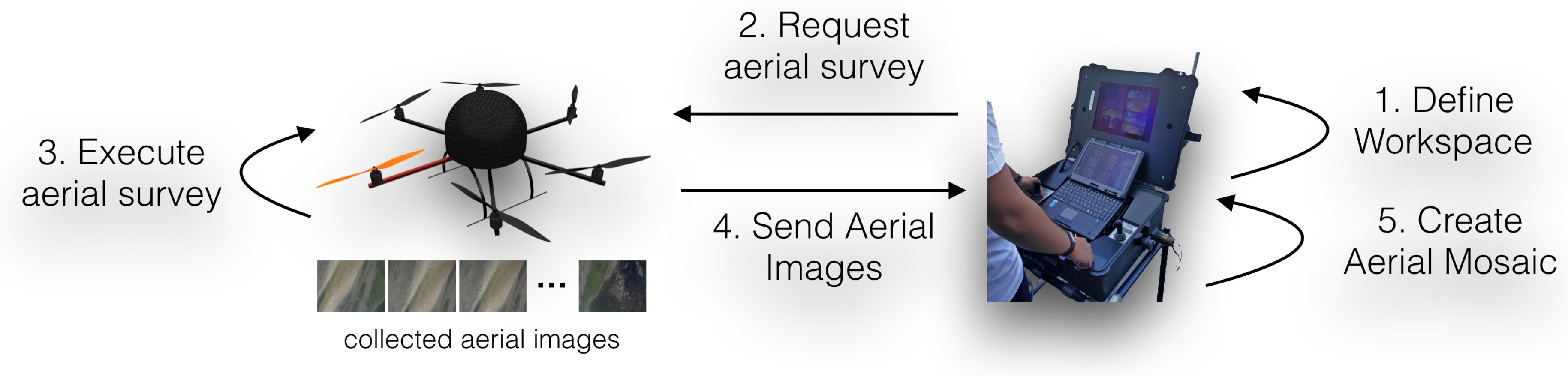
- The human-robot team reaches the operations site. The robots are unloaded from the transportation vehicle. Based on satellite imagery of the operations’ site, the human expert defines the workspace boundaries. These boundaries will be used by the robotic system to constrain its operation range.
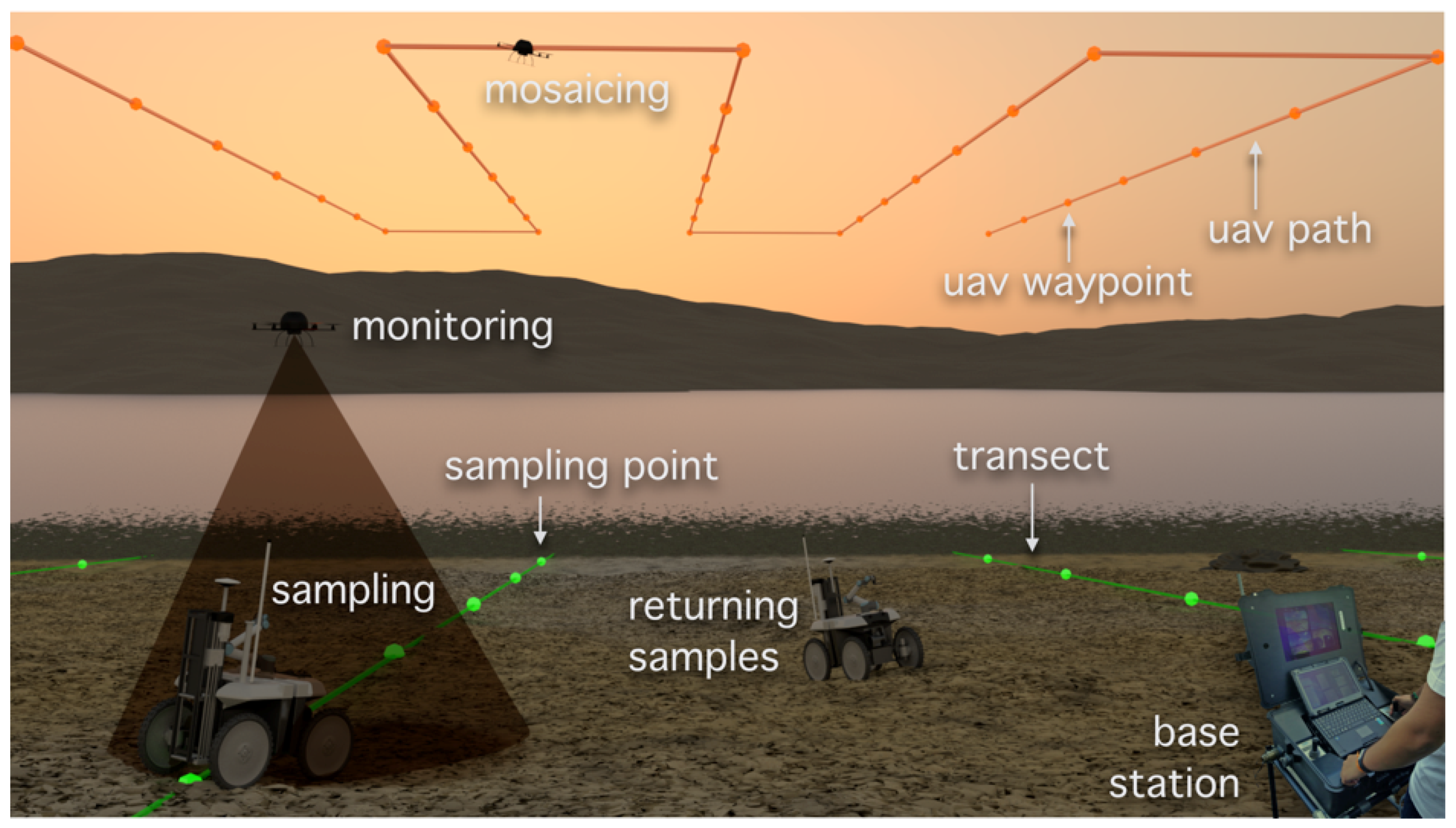
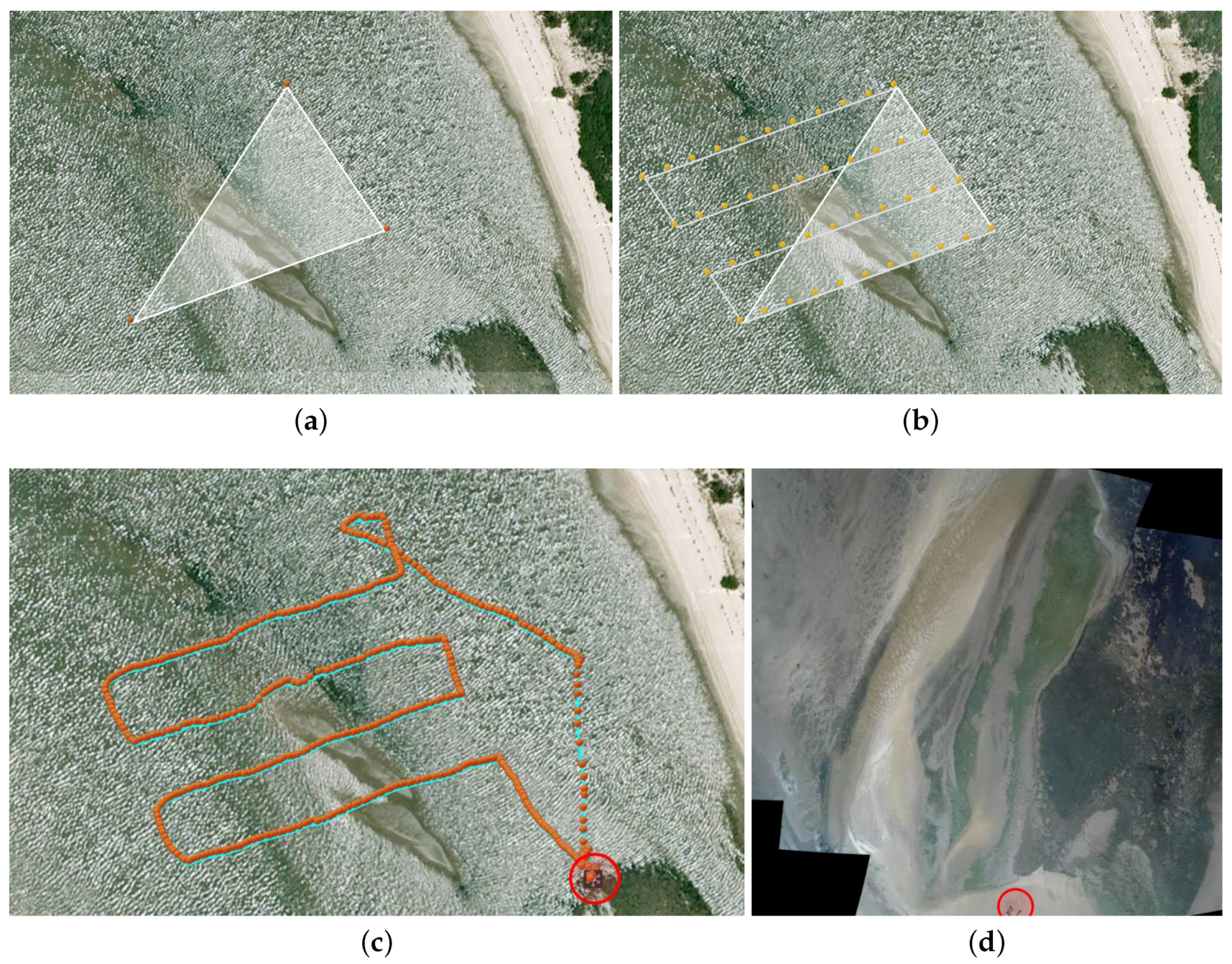
- The aerial robot takes off and performs a scan to cover the workspace defined by the expert. As a result of these scanning procedure, the UAV builds a high resolution geo-referenced mosaic from a set of mutually-registered aerial images. The mosaic is then presented to the expert, which is now able to discard the satellite imagery, as it is most likely outdated.
- At the base station, the expert segments potential key features of the environment, such as water ponds and channels, sea grass coverage, salt marsh vertical vegetation, sand banks and all sorts of physical obstacles to the UGV’s navigation. Then, based on this meta-data, the expert specifies a set of transects to be sampled by the robot (see Section 3.3).
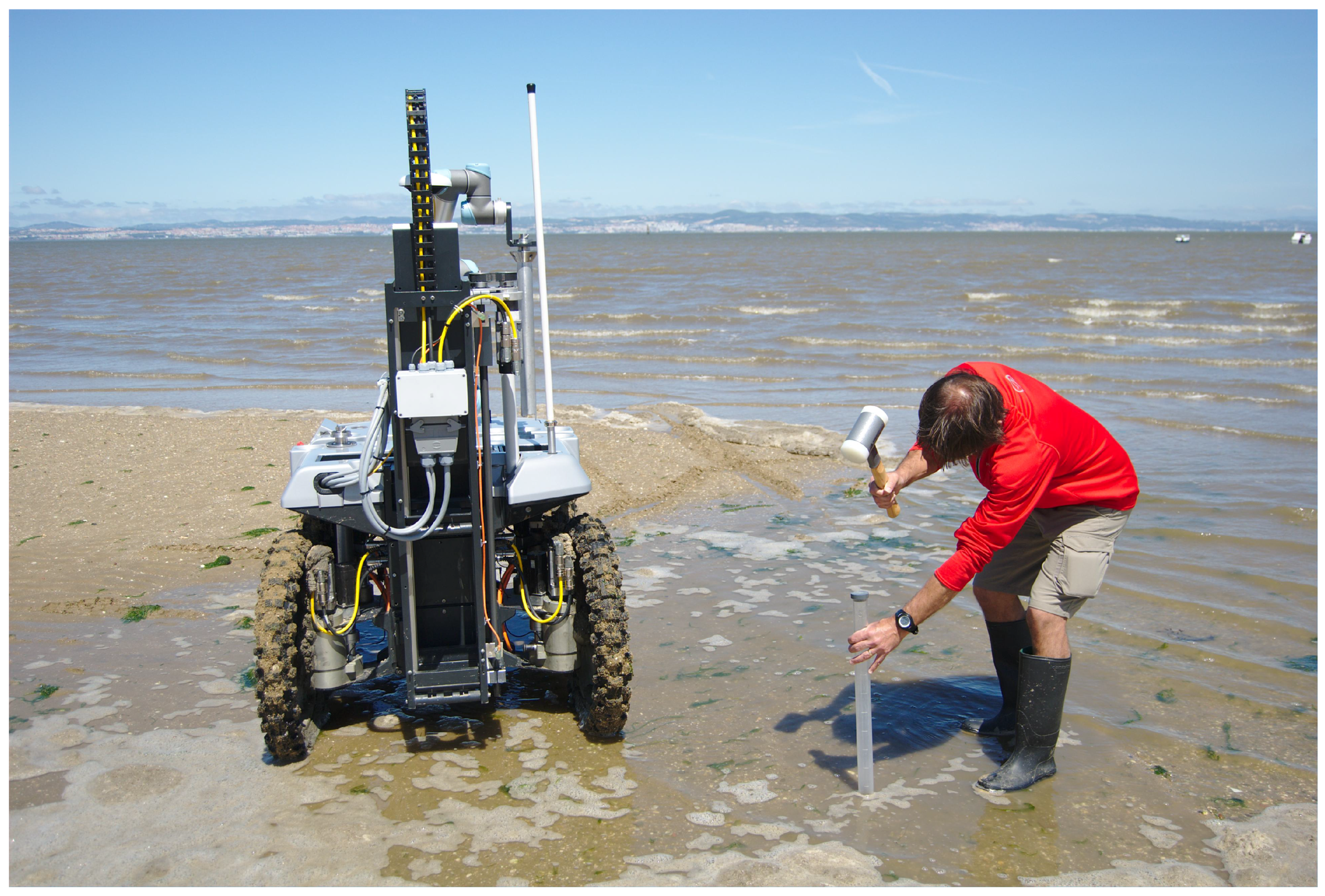
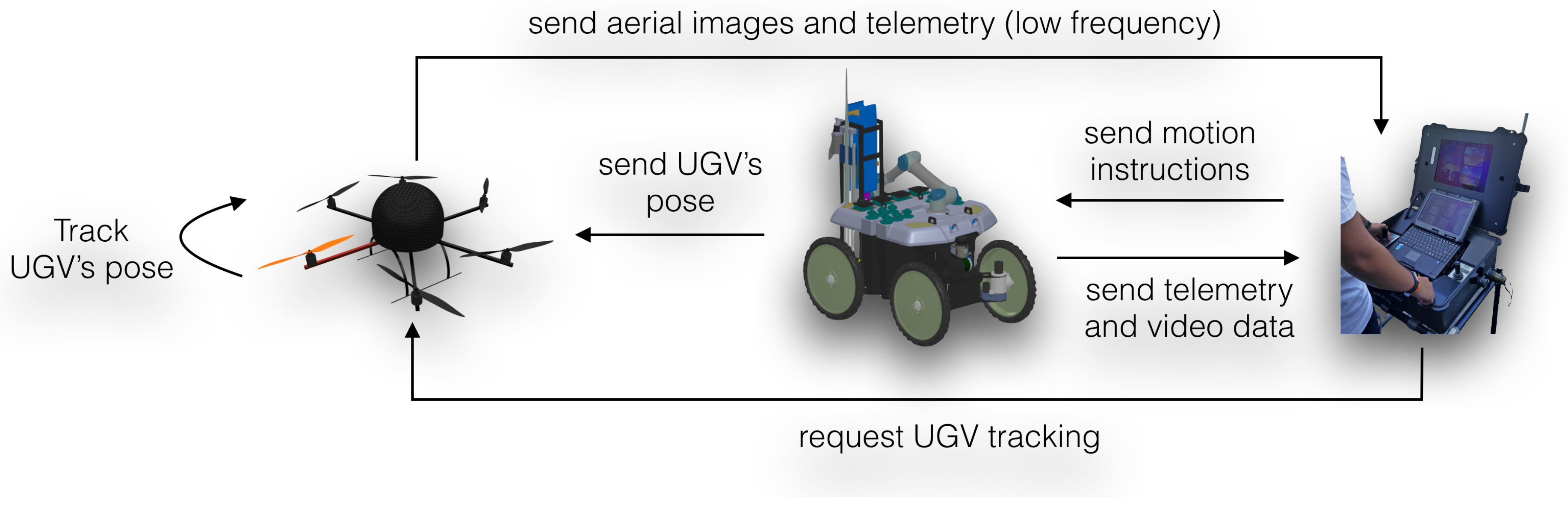
- With the information collected in the previous step, the ground vehicle is tele-operated by the expert so as to traverse the transects and periodically sample the terrain while avoiding any peril in its way. At each sampling point, the expert requests the ground vehicle to perform a sediment sampling behavior. If intended by the expert, the aerial vehicle is used to provide aerial images, augmenting the operator’s perception about the mission execution.
- When the ground vehicle has either its sample containers filled or has visited all of the defined sampling locations, the expert tele-operates the robot back to the base station.
- Back at the base station, the expert unloads the sample containers into isothermal boxes with cooling pads, which are subsequently brought to the lab for post-processing. If the mission is not complete, the expert loads the ground vehicle with empty sample containers and resumes the mission (return to the previous step).
- Once the mission in the current operation’s site is complete, the expert washes the ground vehicle with fresh water so as to remove dirt and salt residues. Then, the expert may be called upon to execute some maintenance procedures, such as recharging batteries or re-inflating tires. Finally, the human-robot team leaves the operations site.
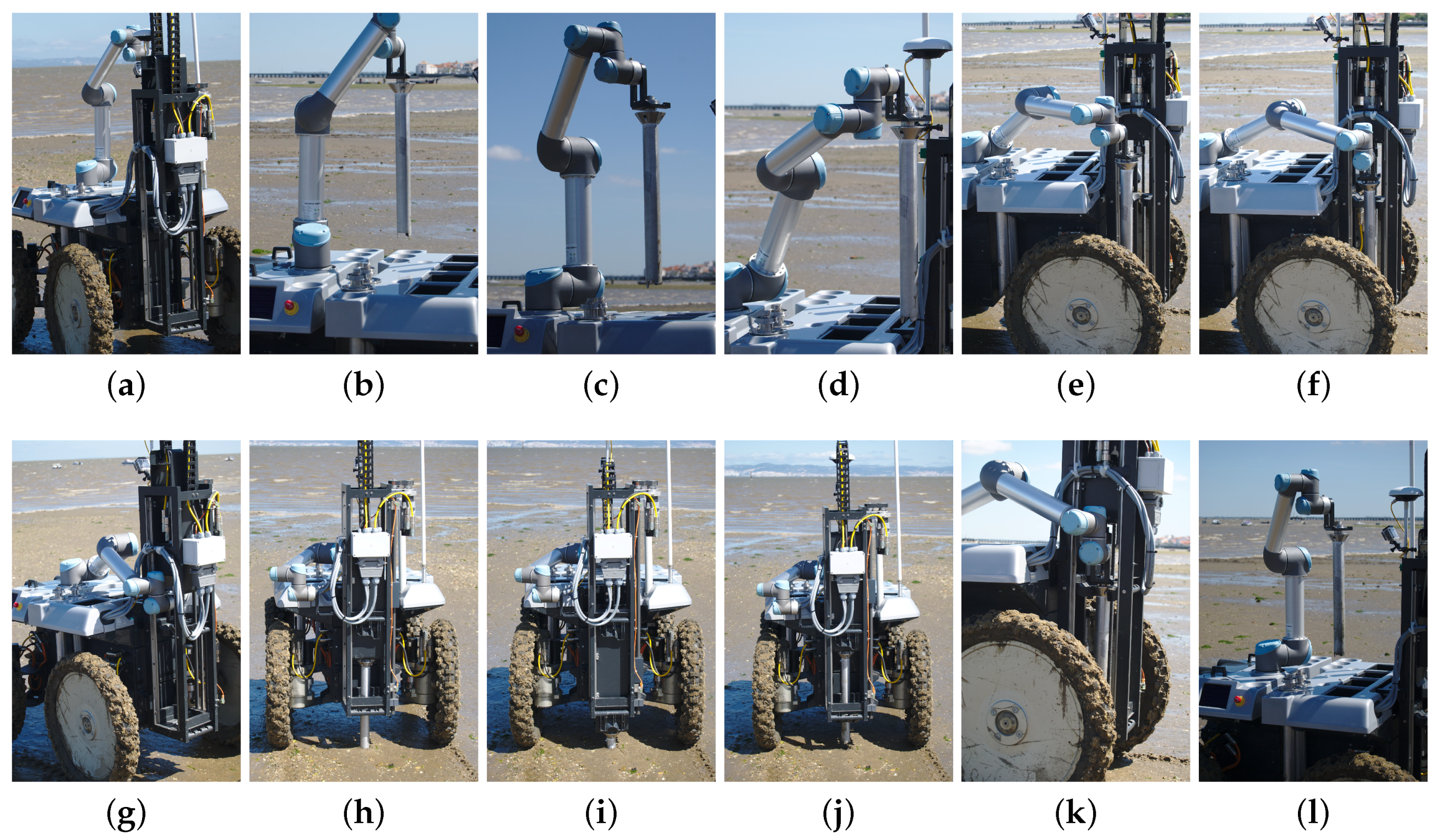
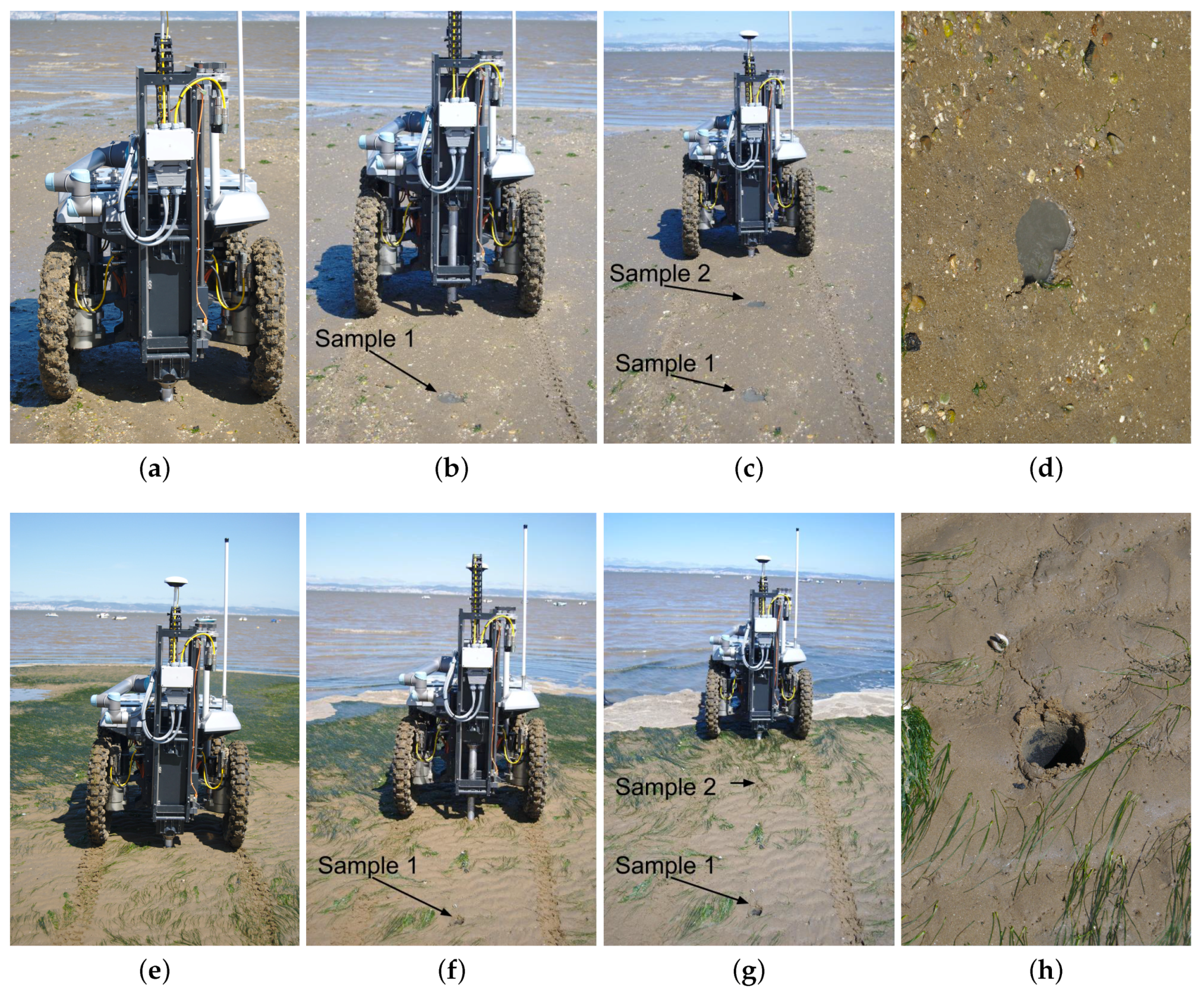
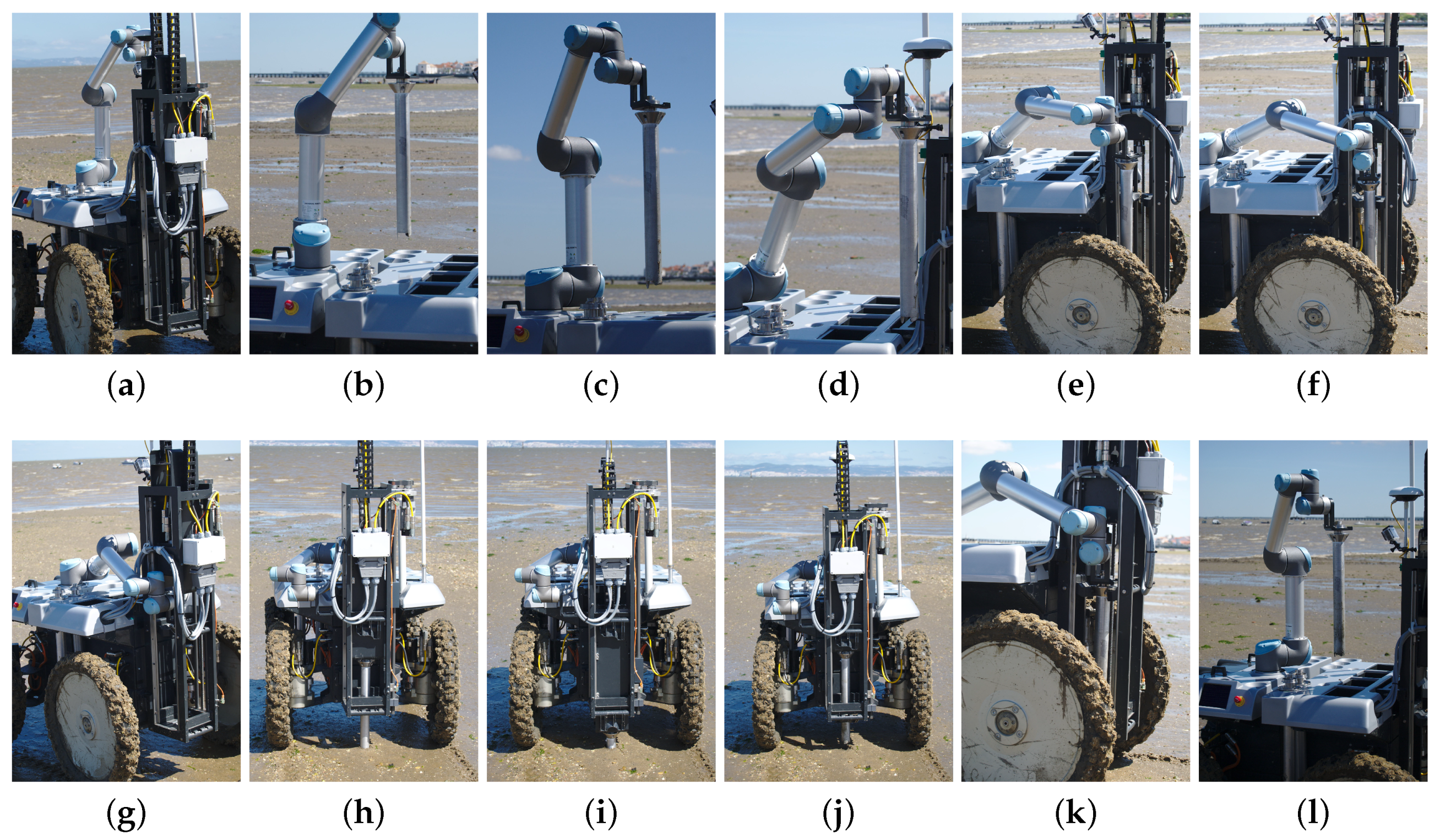
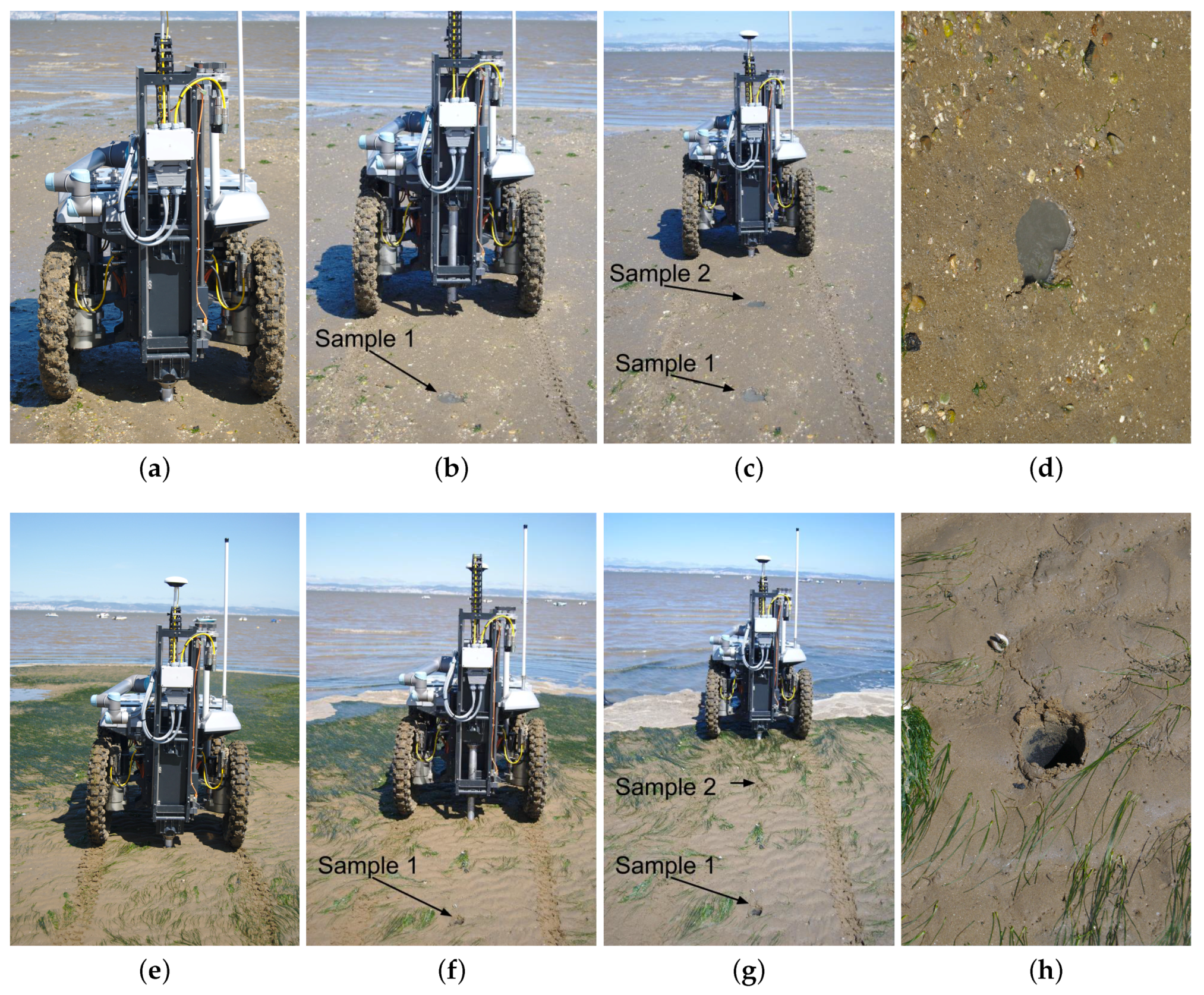
3.3. Sampling Procedure
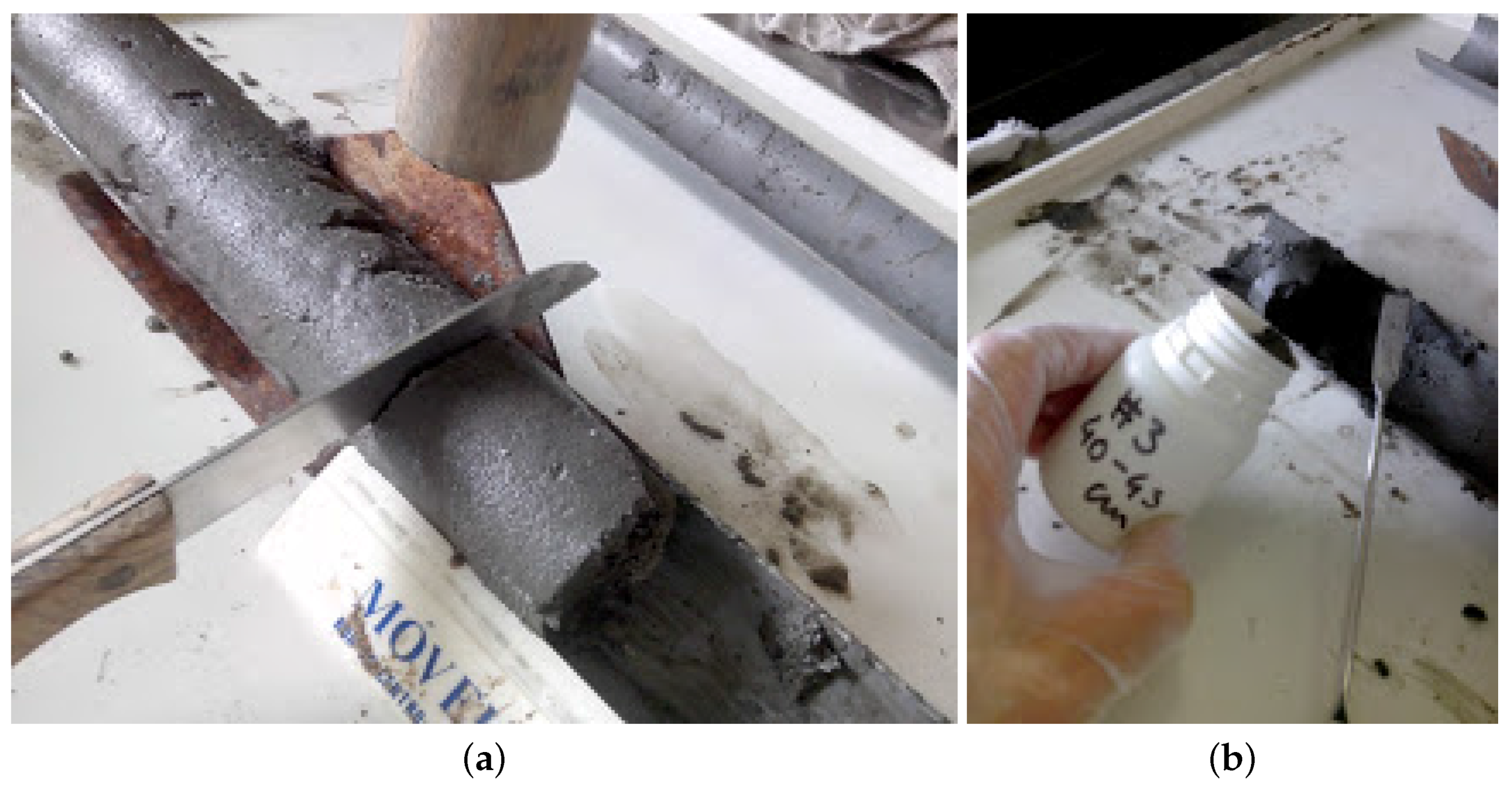
3.4. Sampling Processing
4. The Robotic Team
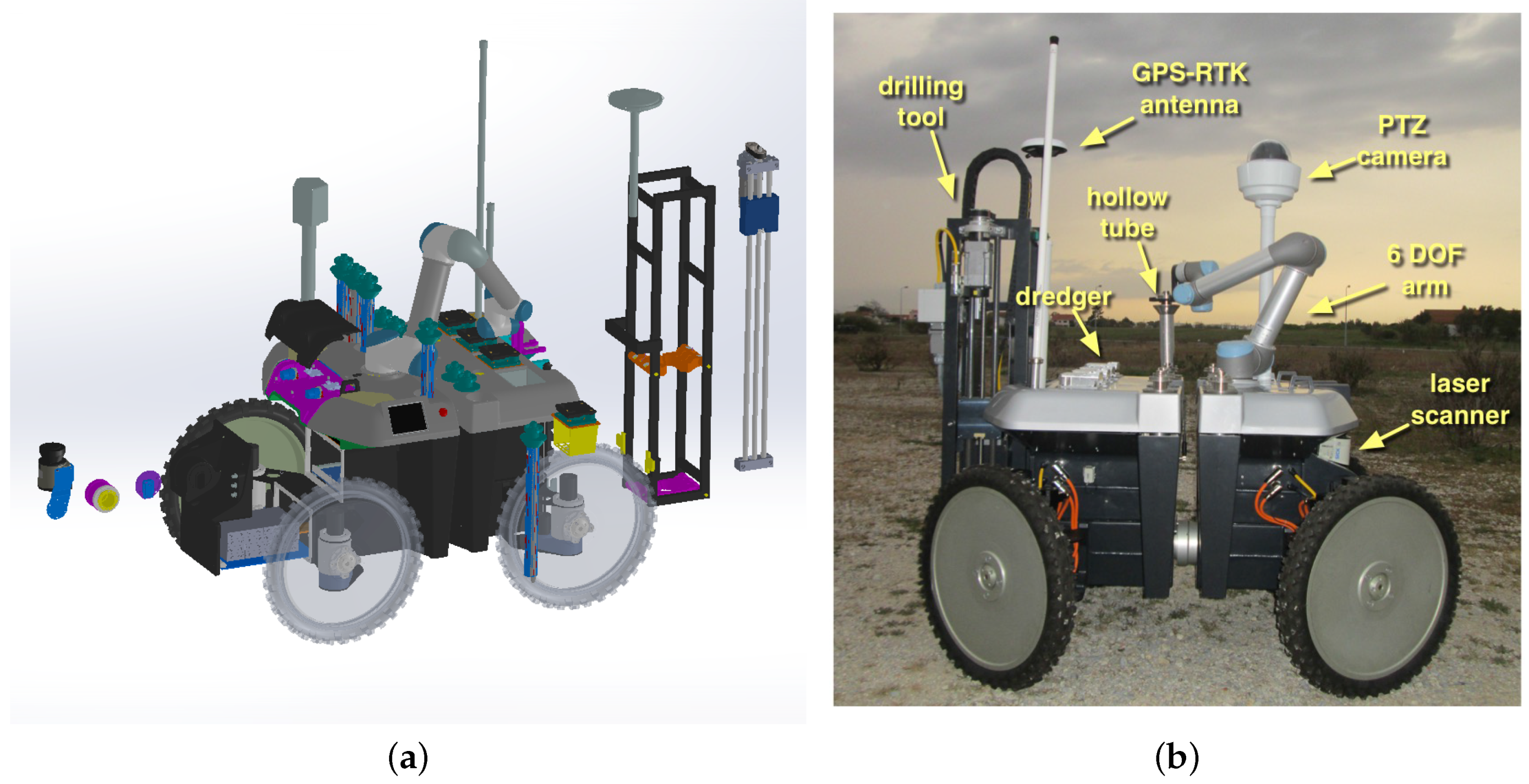
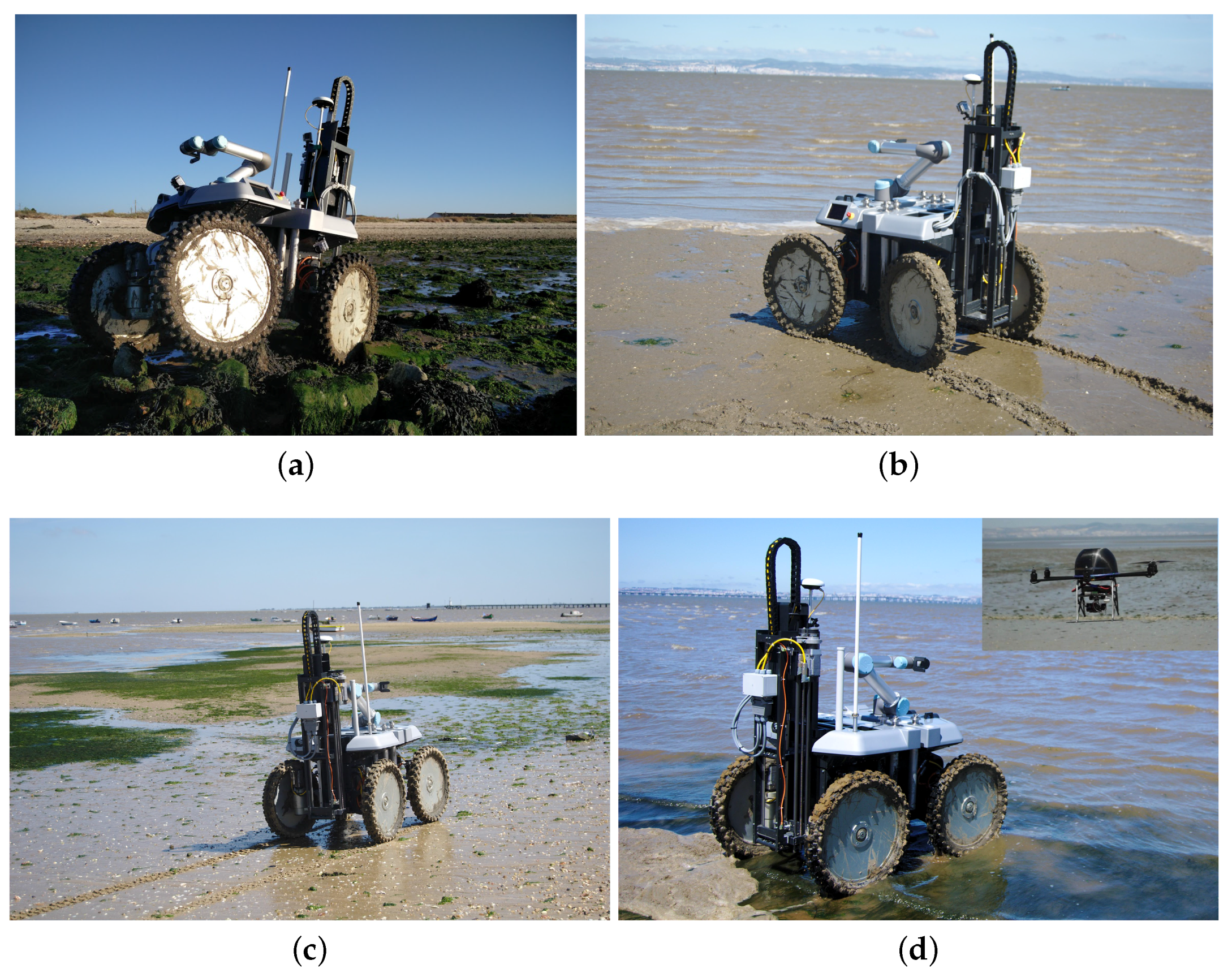
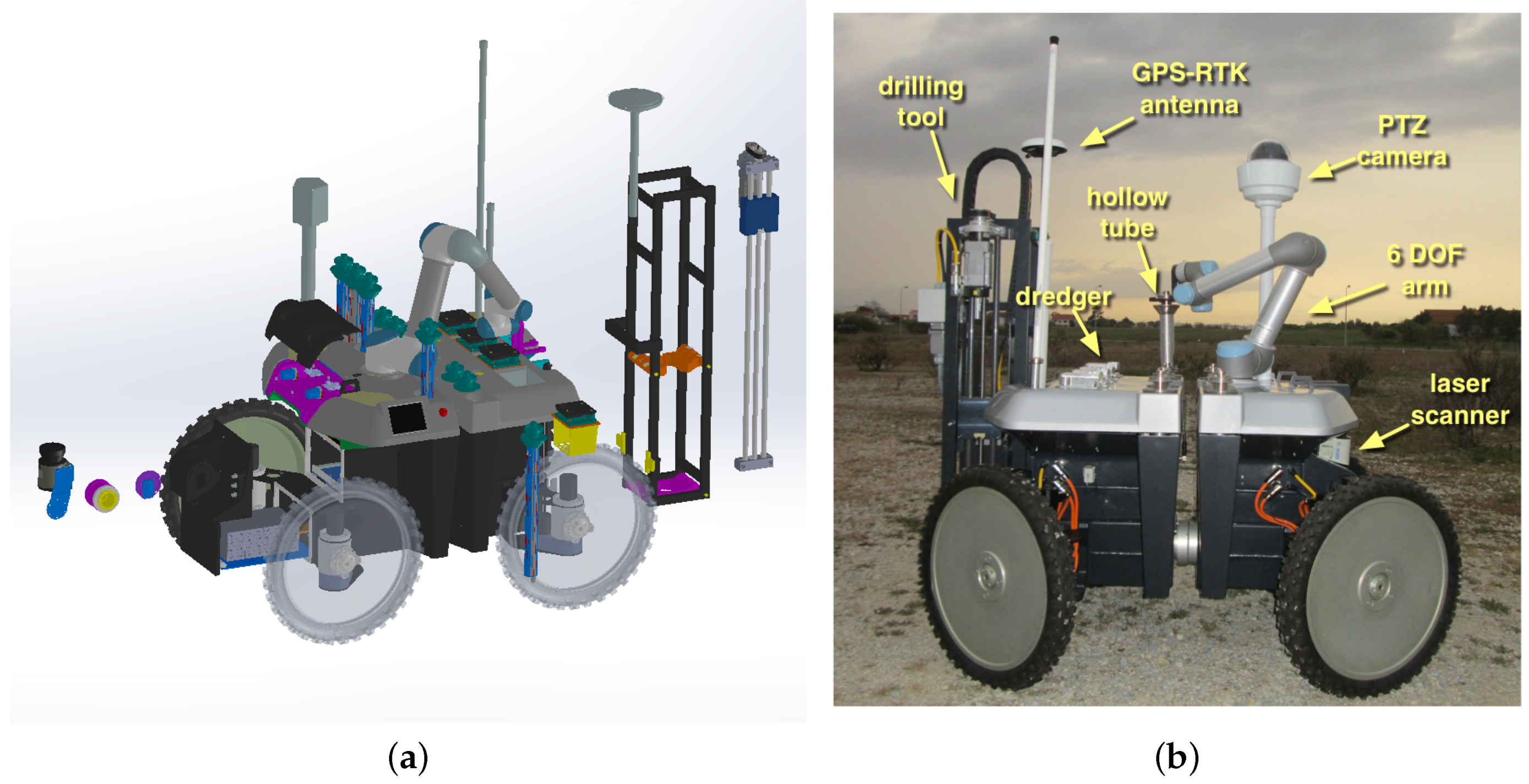
4.1. The Unmanned Ground Vehicle
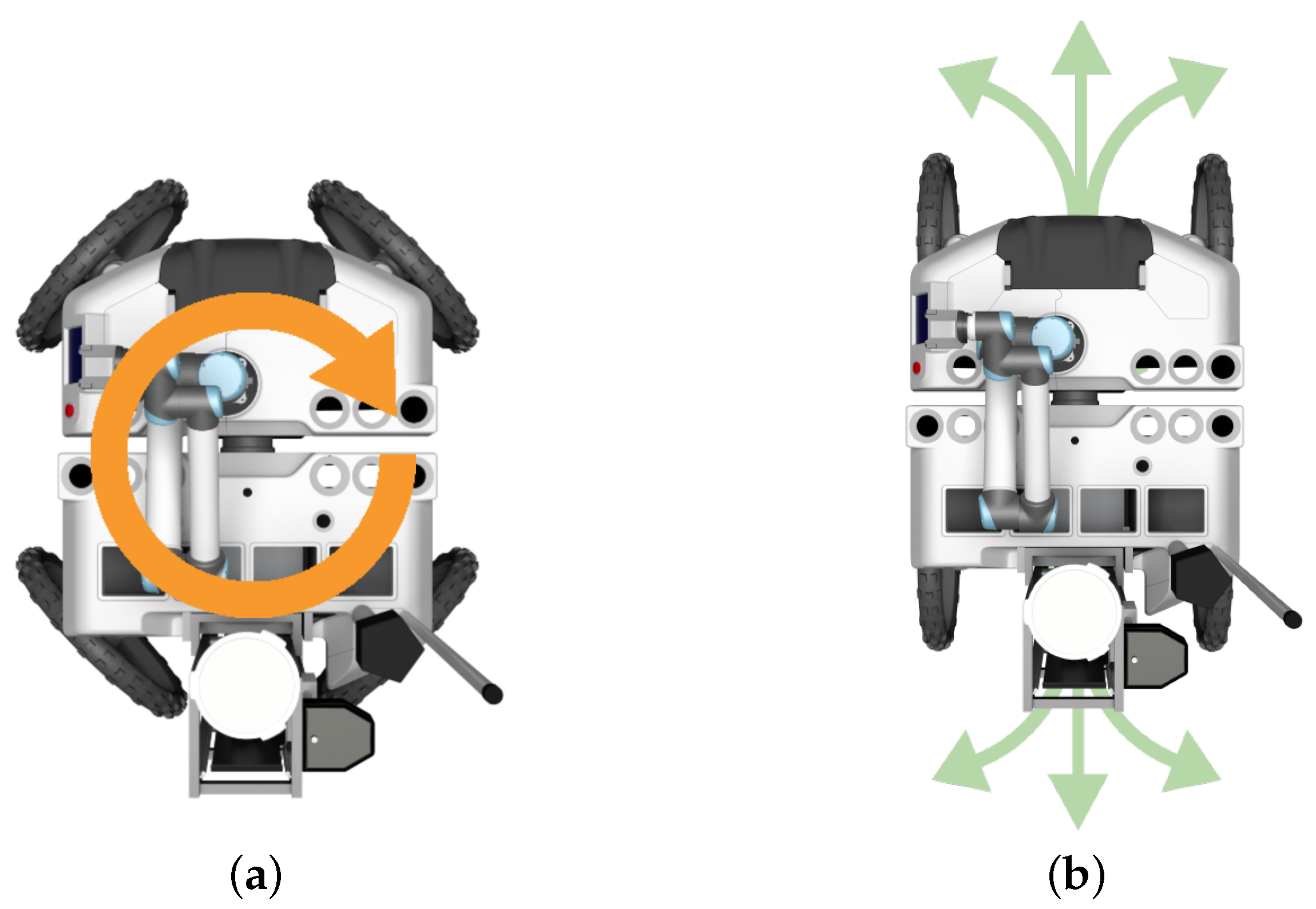
4.1.1. Mechanical Hardware
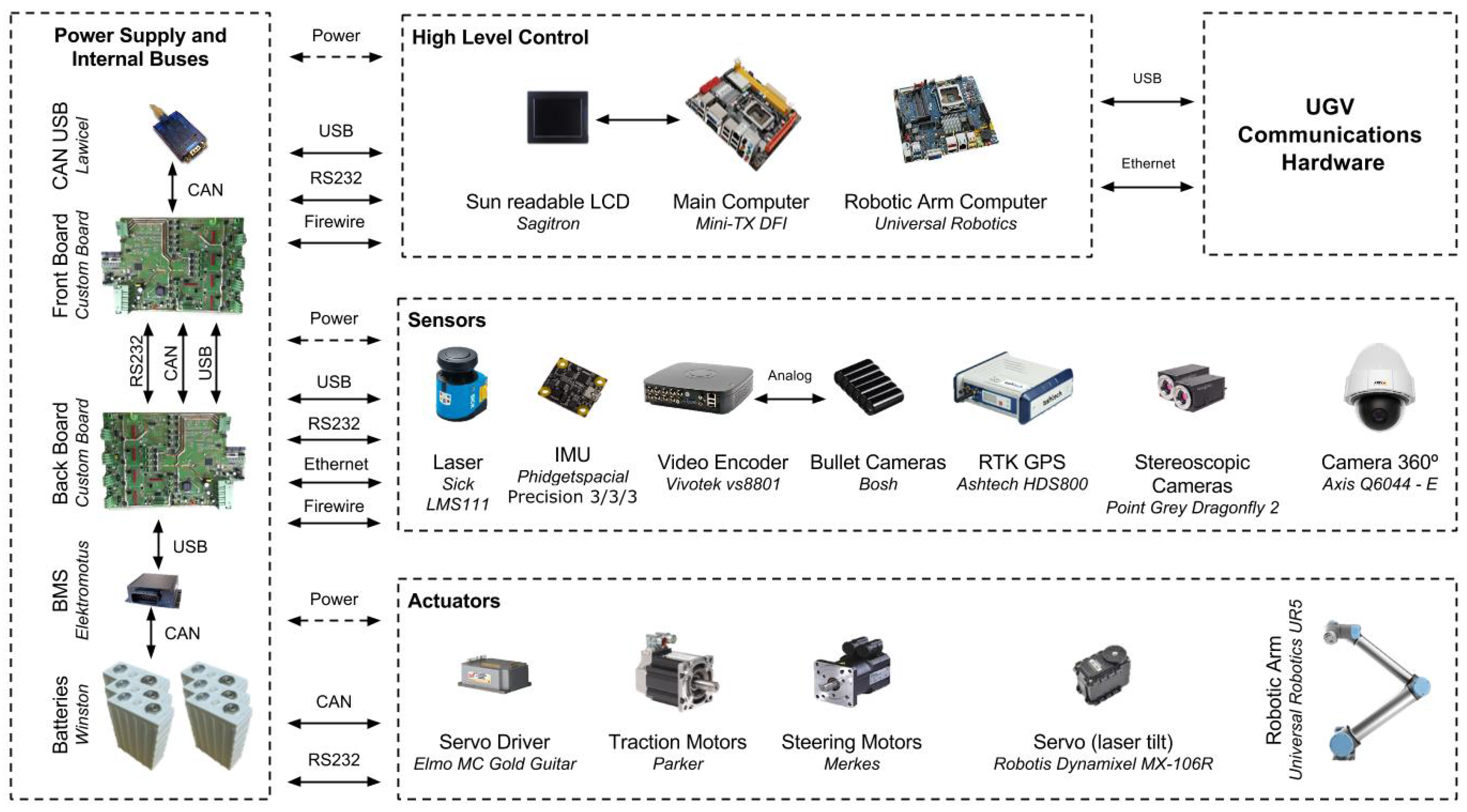
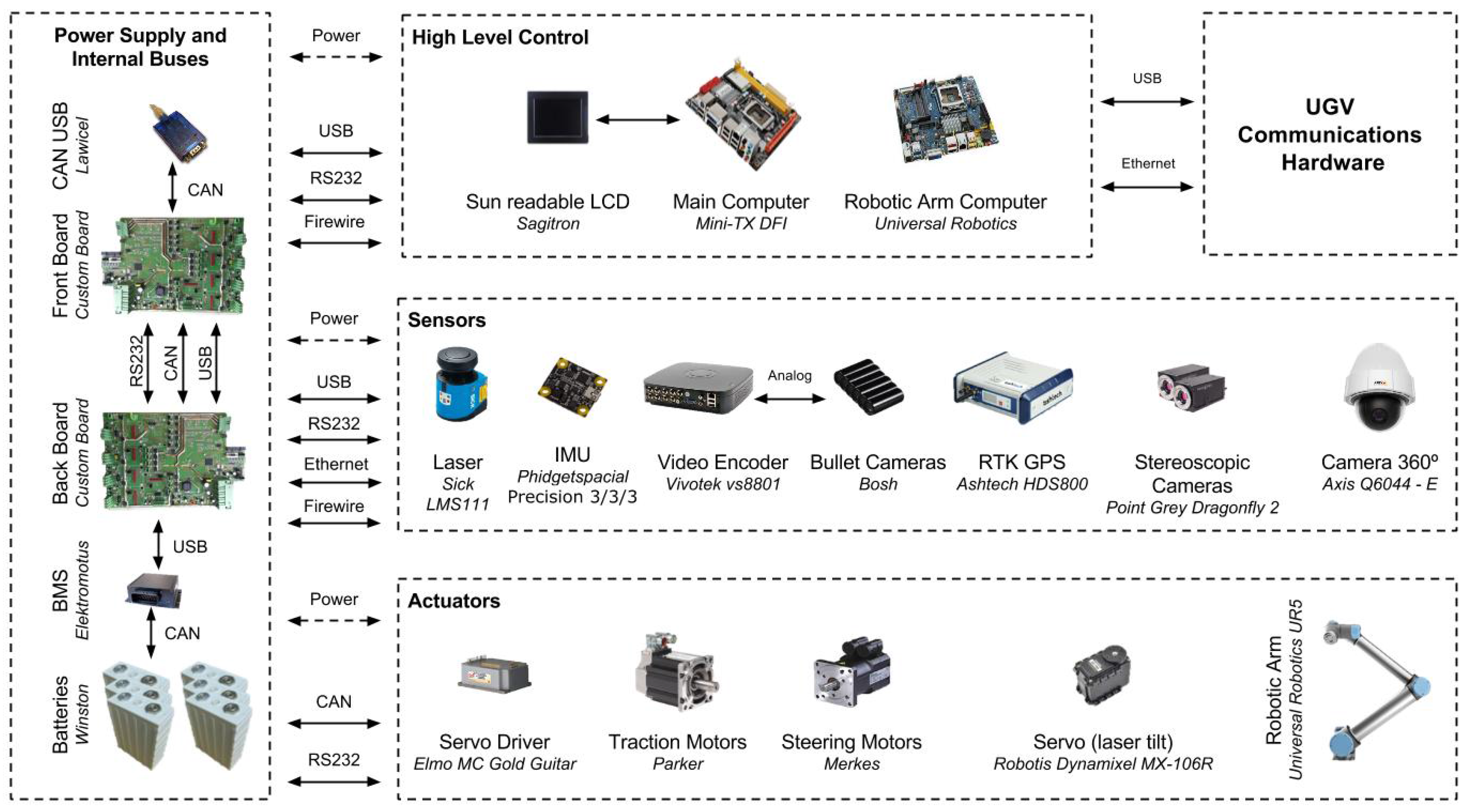
4.1.2. Electronics Hardware
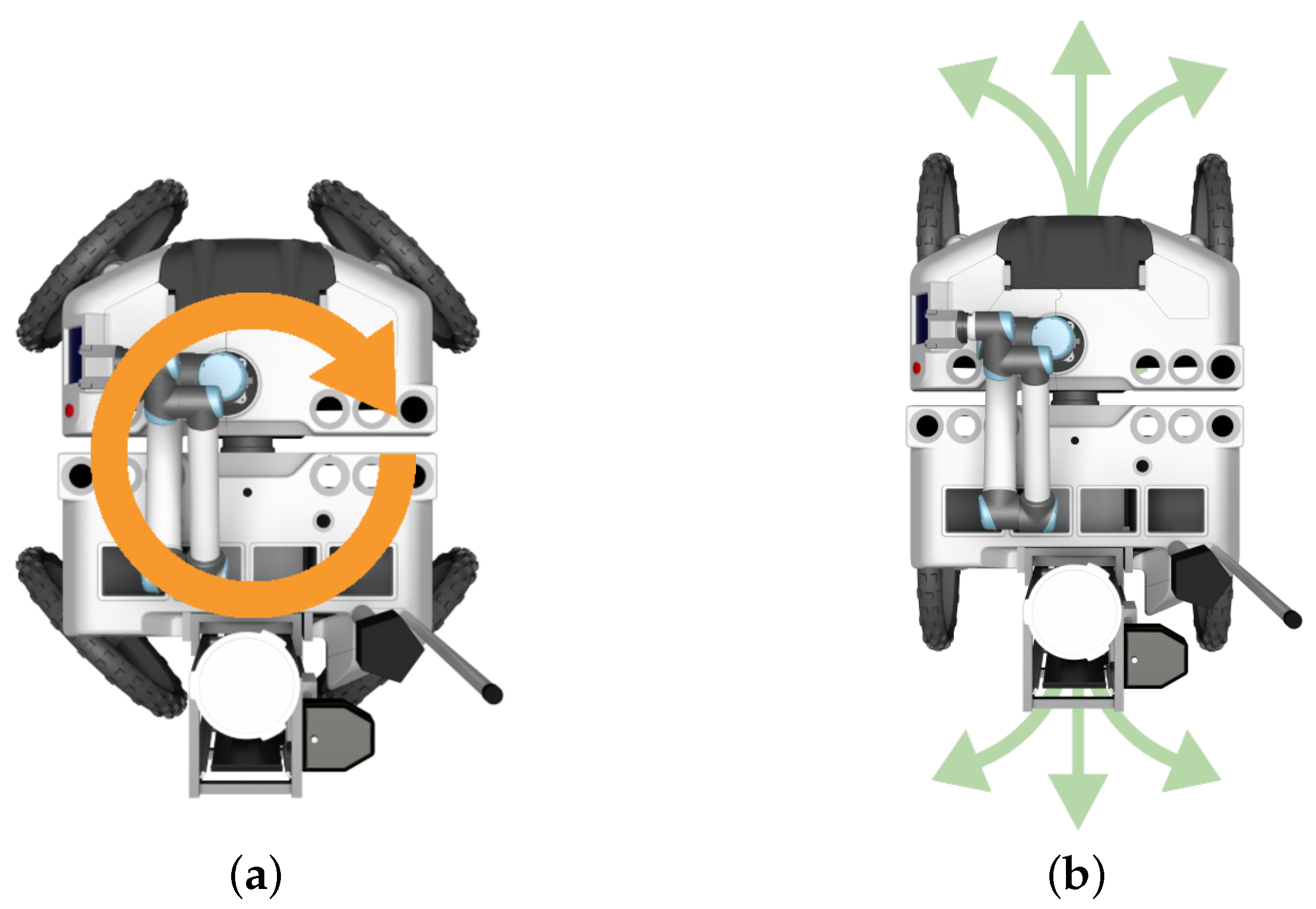
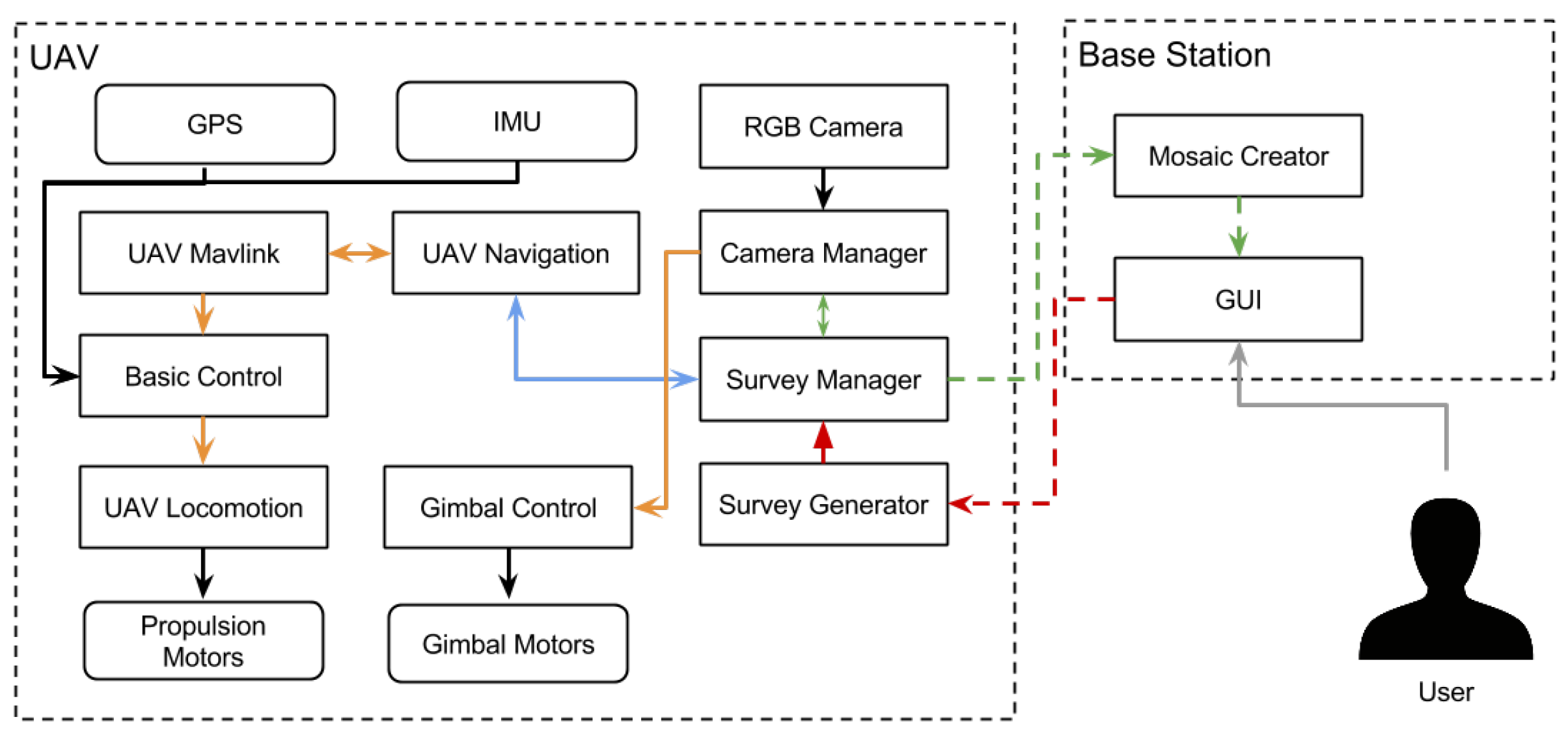
4.1.3. Control Software
4.2. The Unmanned Aerial Vehicle
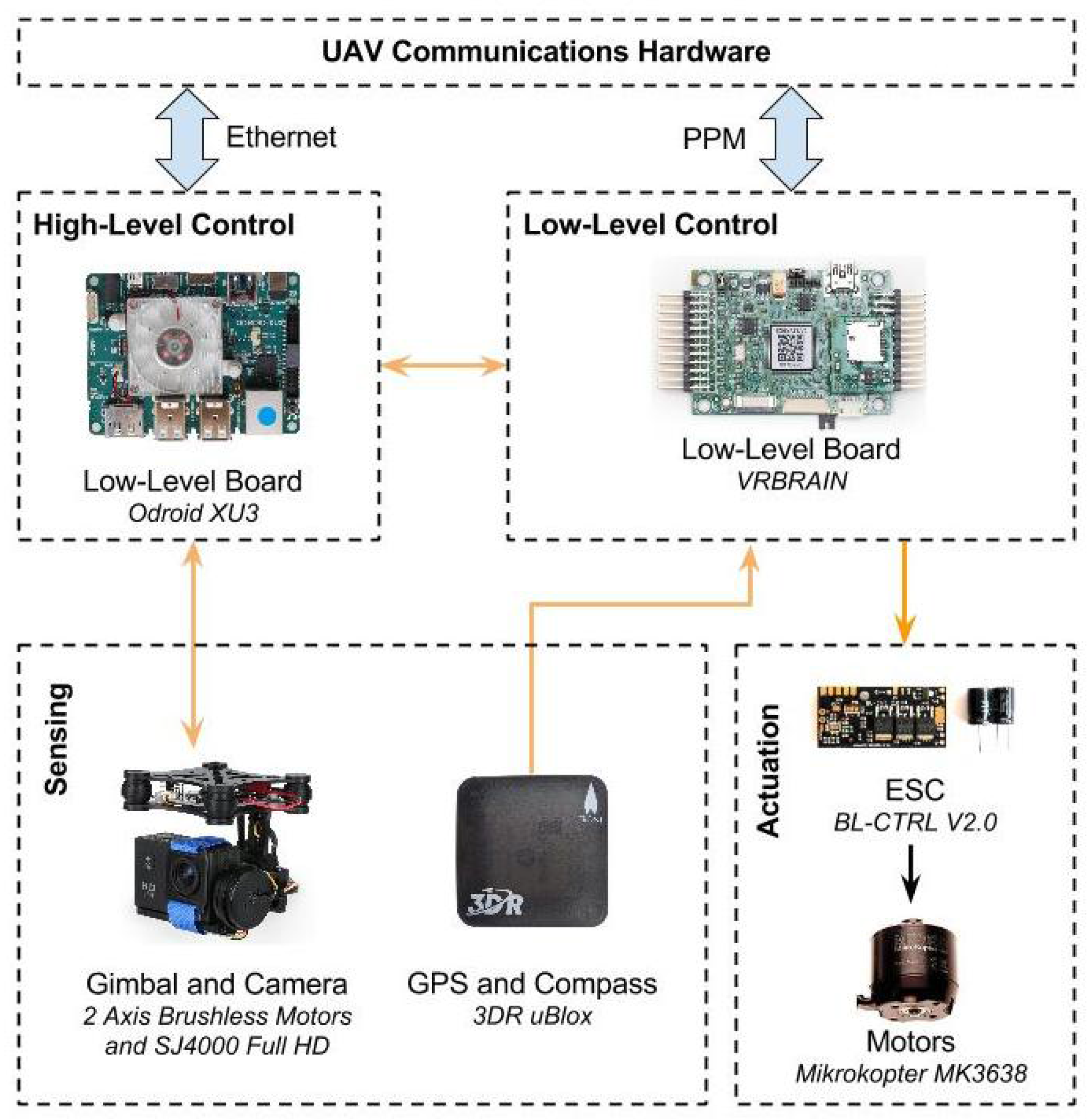
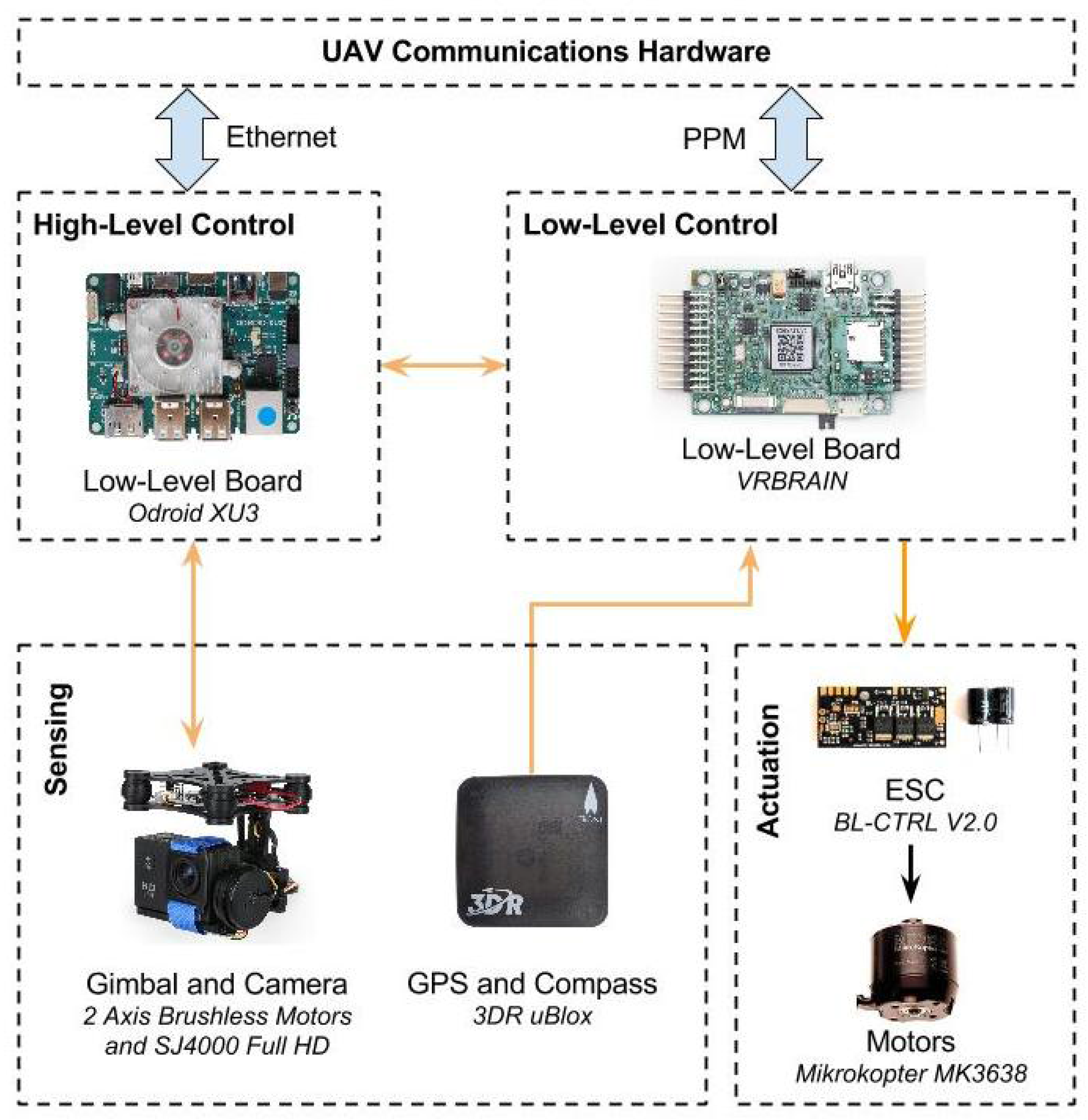
4.2.1. Mechanical, Hardware and Control System
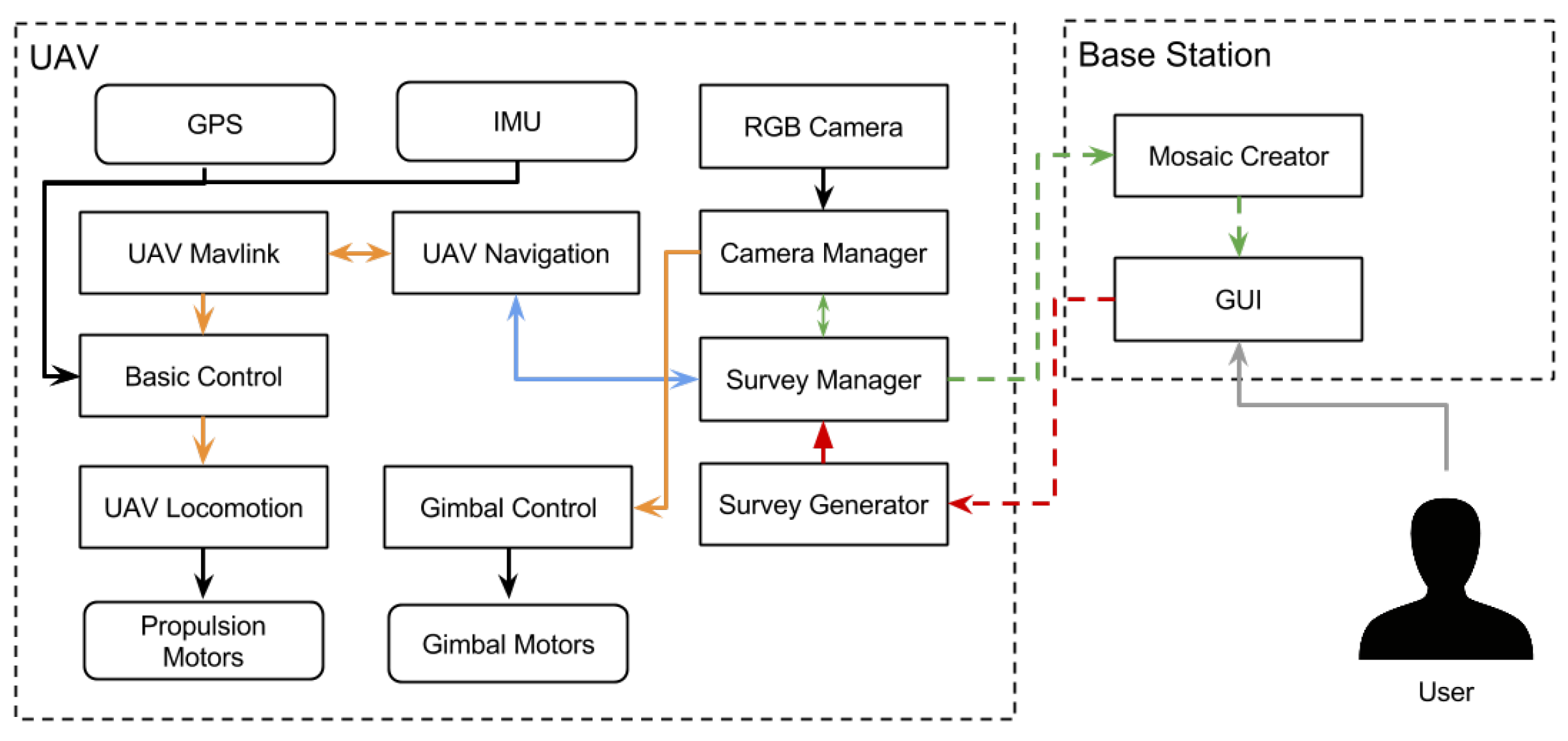
4.2.2. Flight Behavior and Mosaic Creation
5. Human-Robot Teamwork
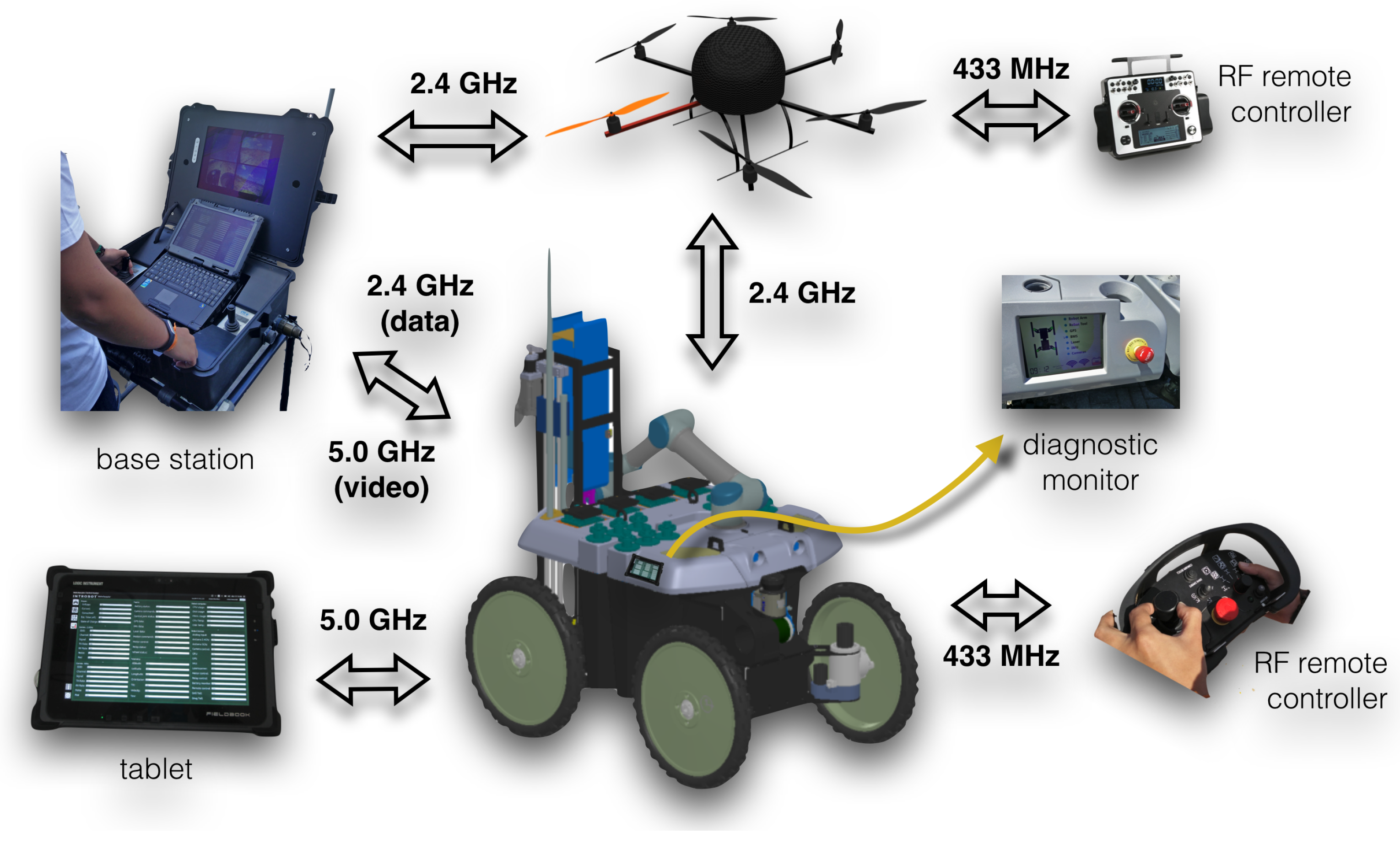
5.1. Human-Robot Interaction Devices
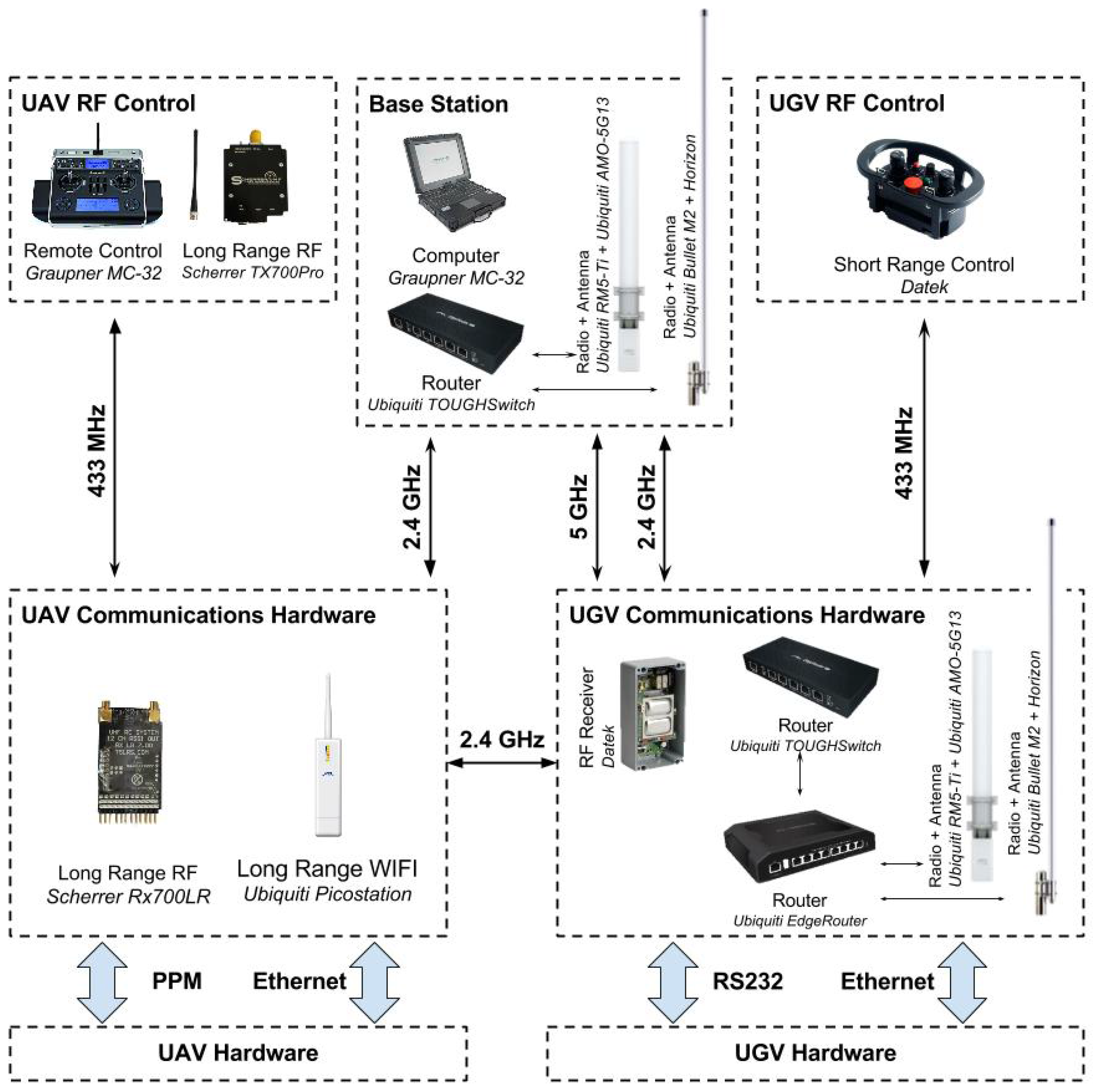
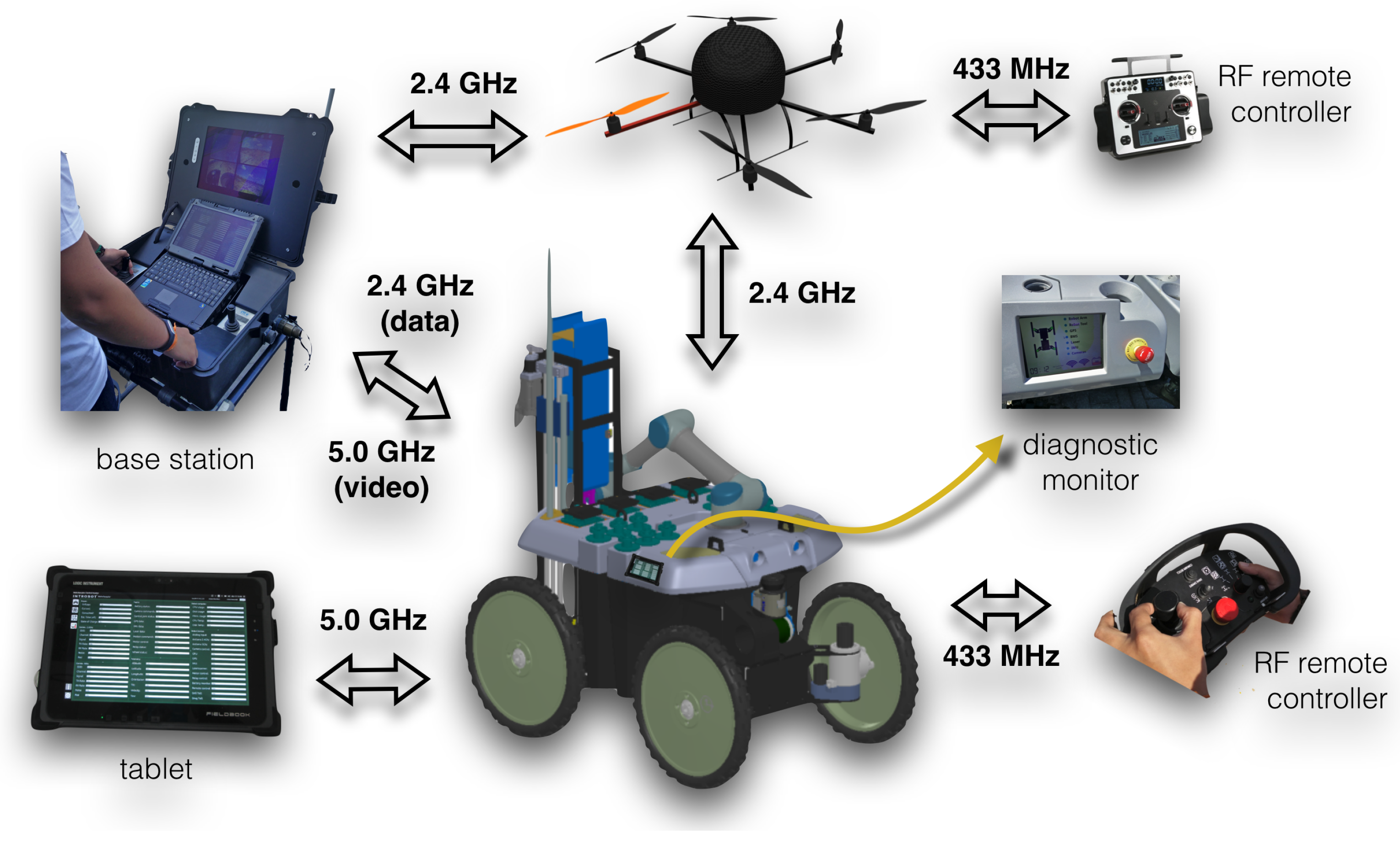
5.2. Communications Infrastructure
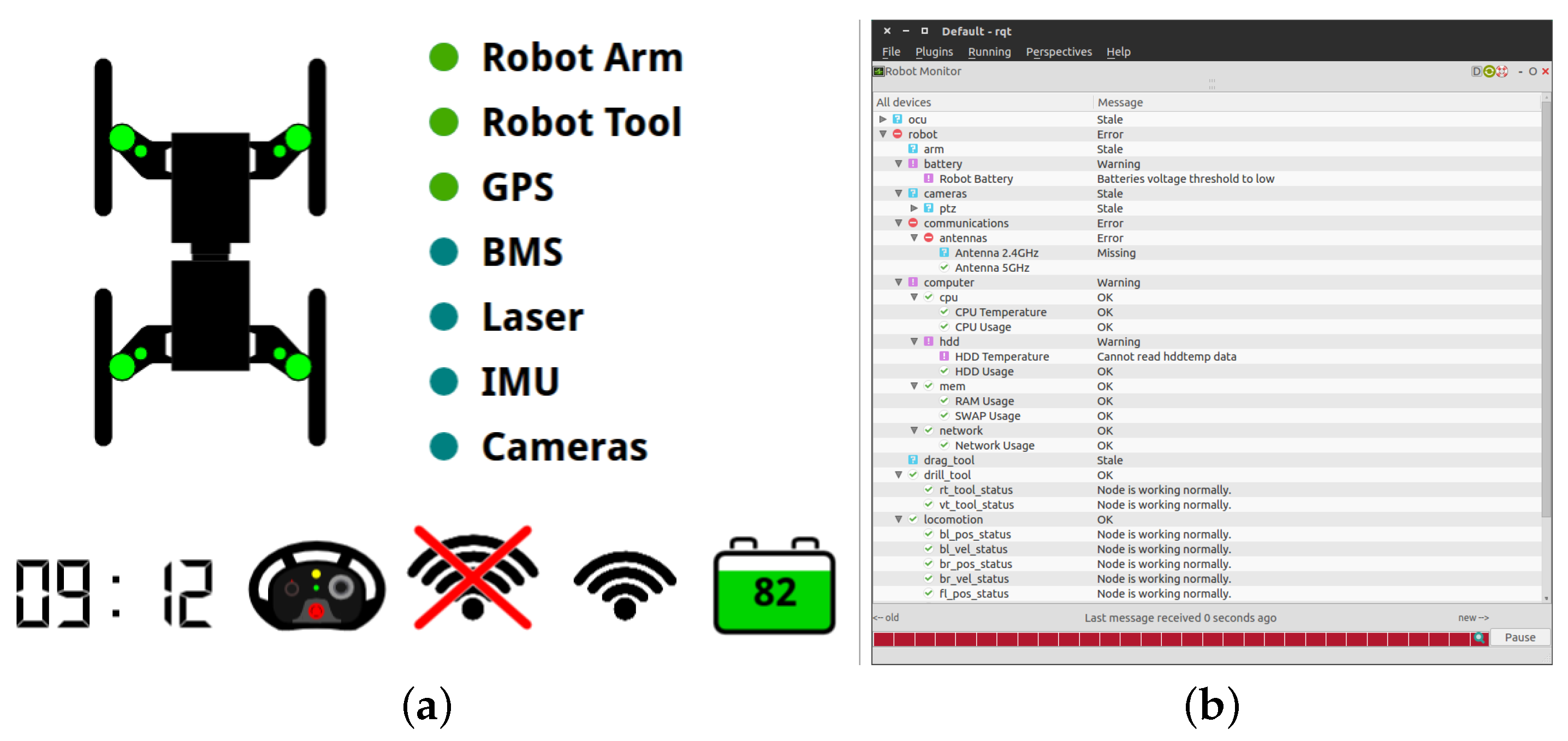
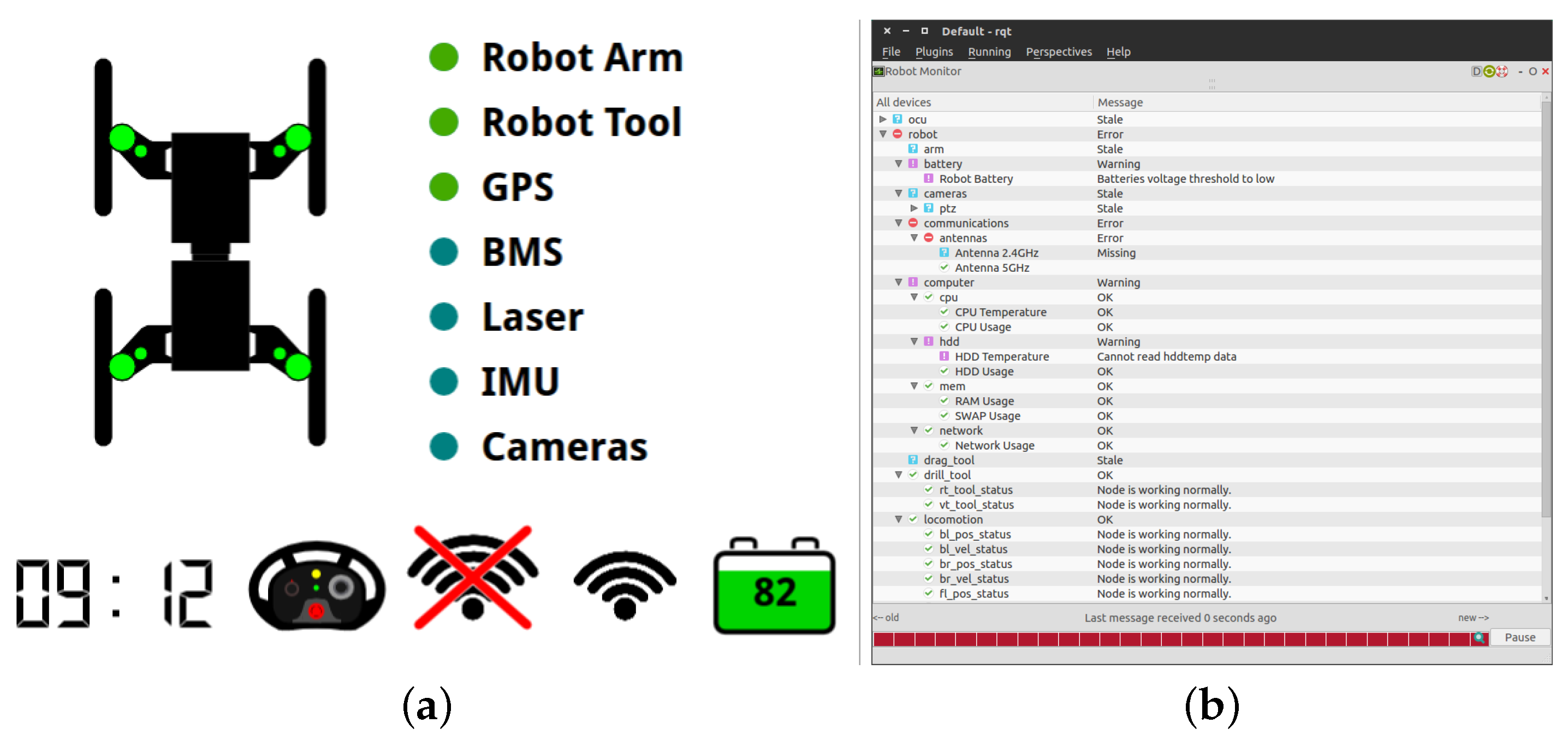
System’s Health Supervision
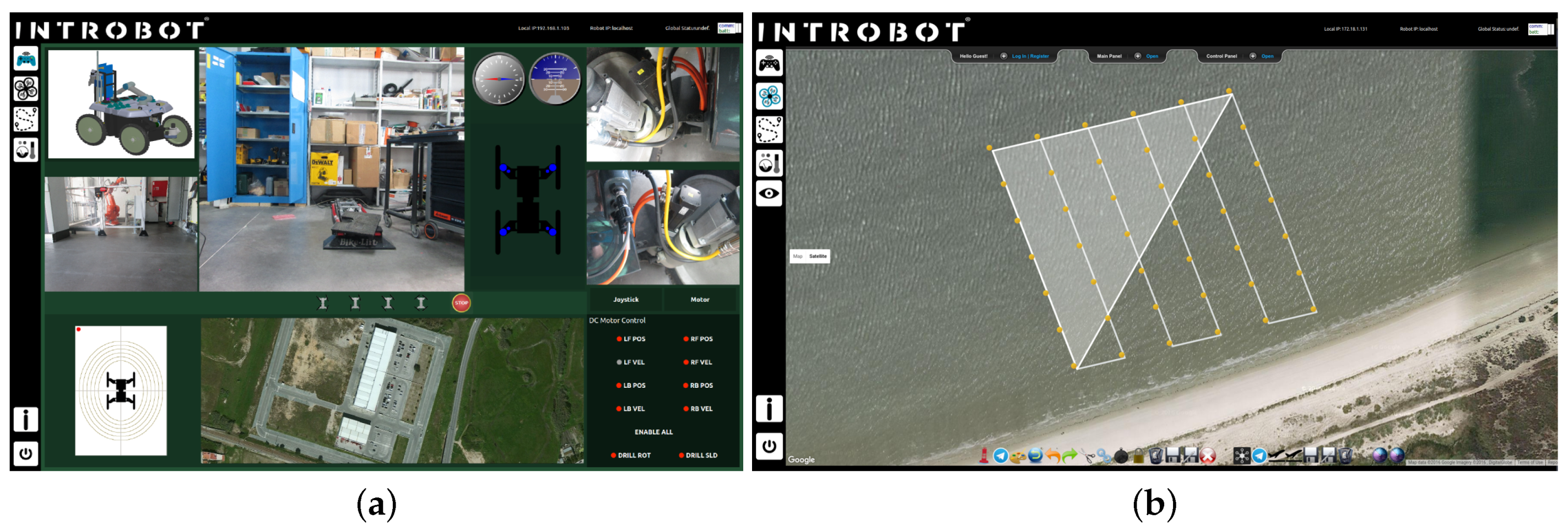
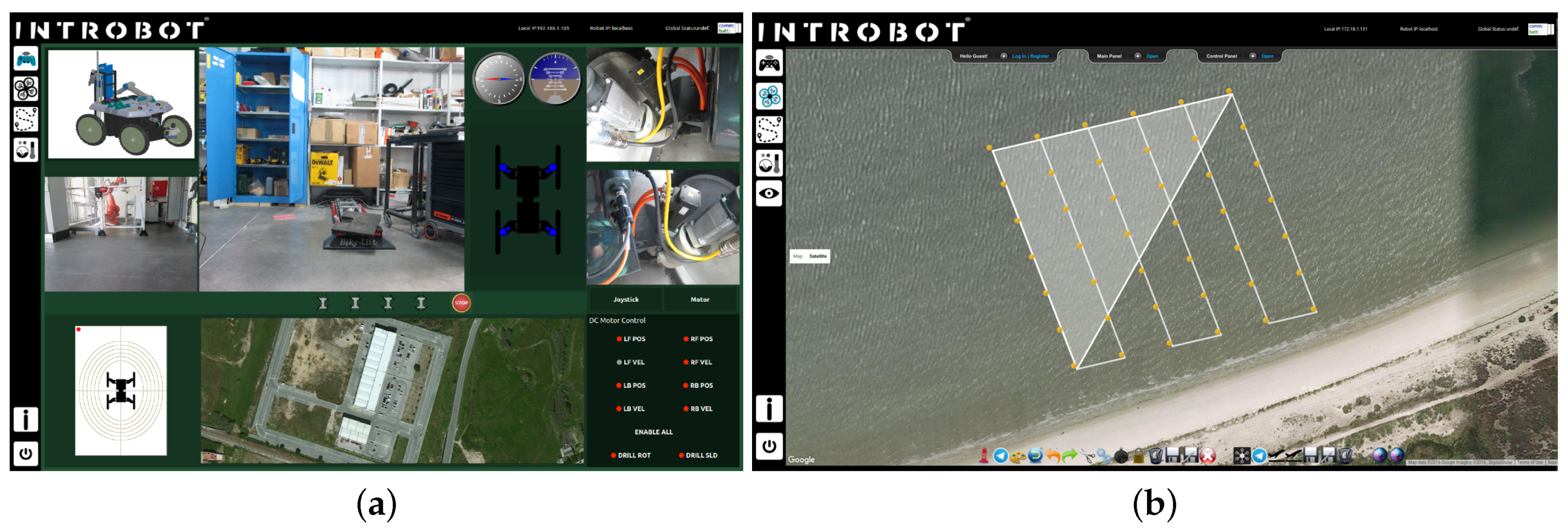
5.3. Mission Graphical User Interface
5.4. Human-Robot Interaction Patterns
6. Field Trials
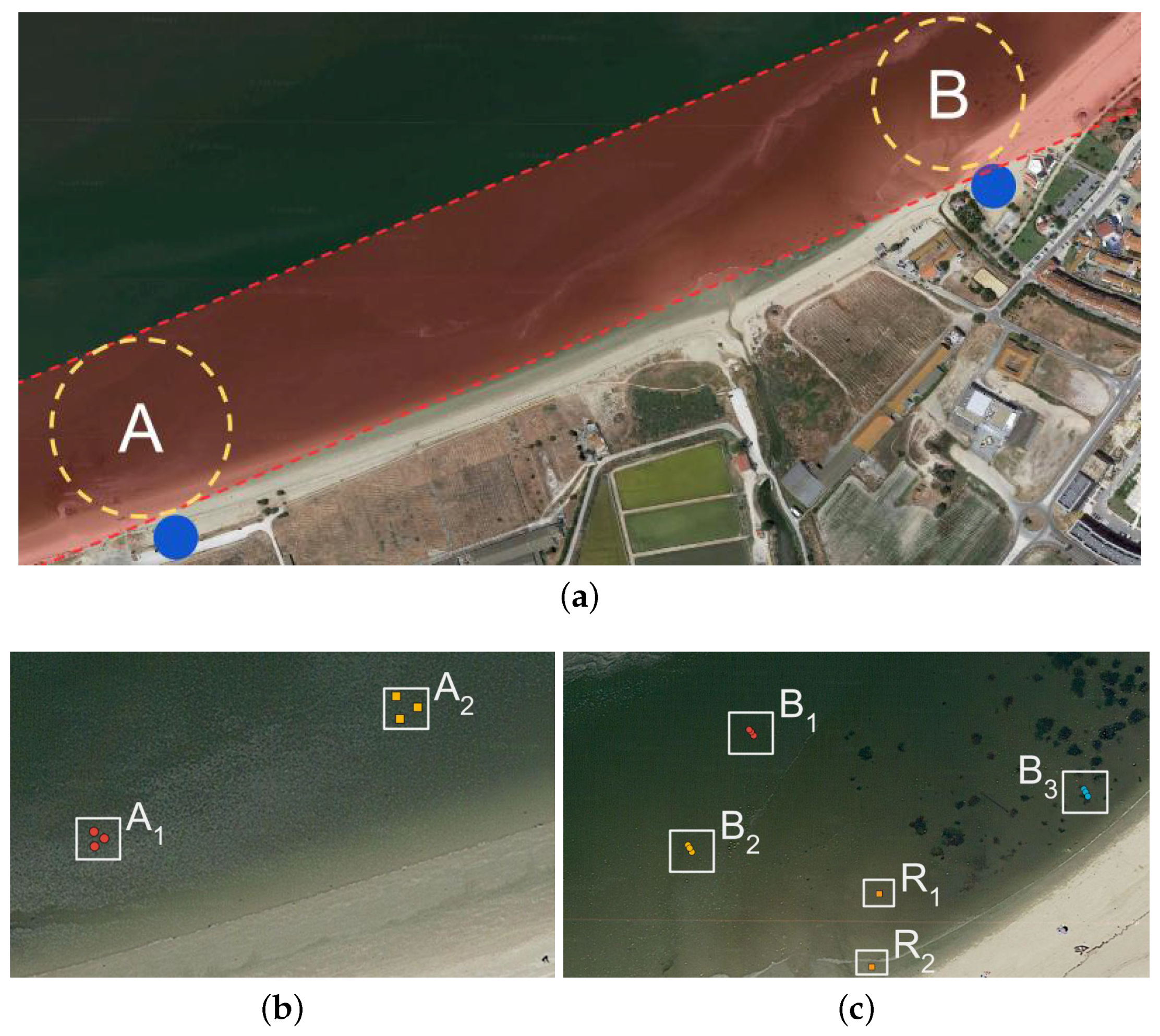
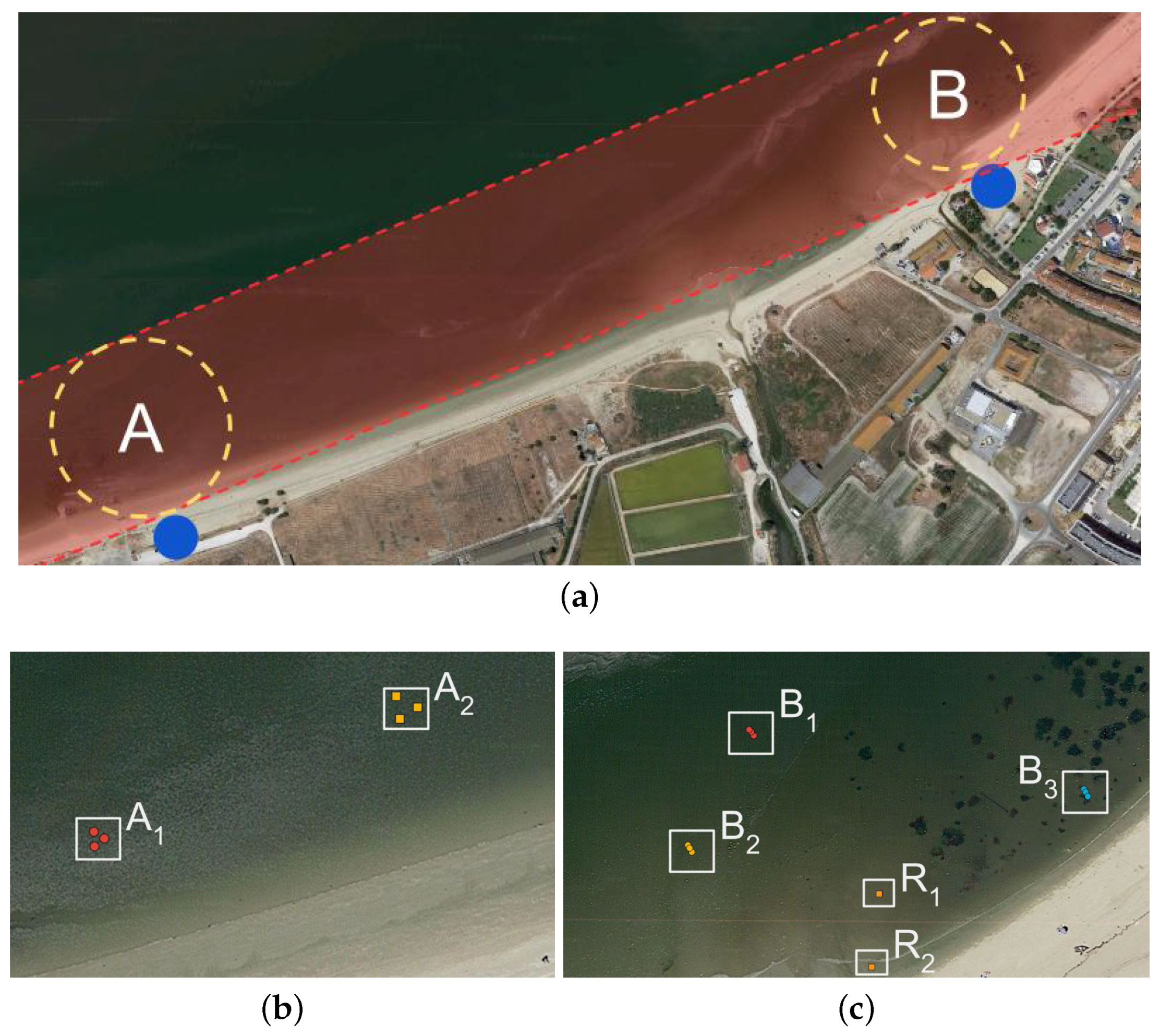
6.1. Sampling Locations Selection
6.2. Logistics
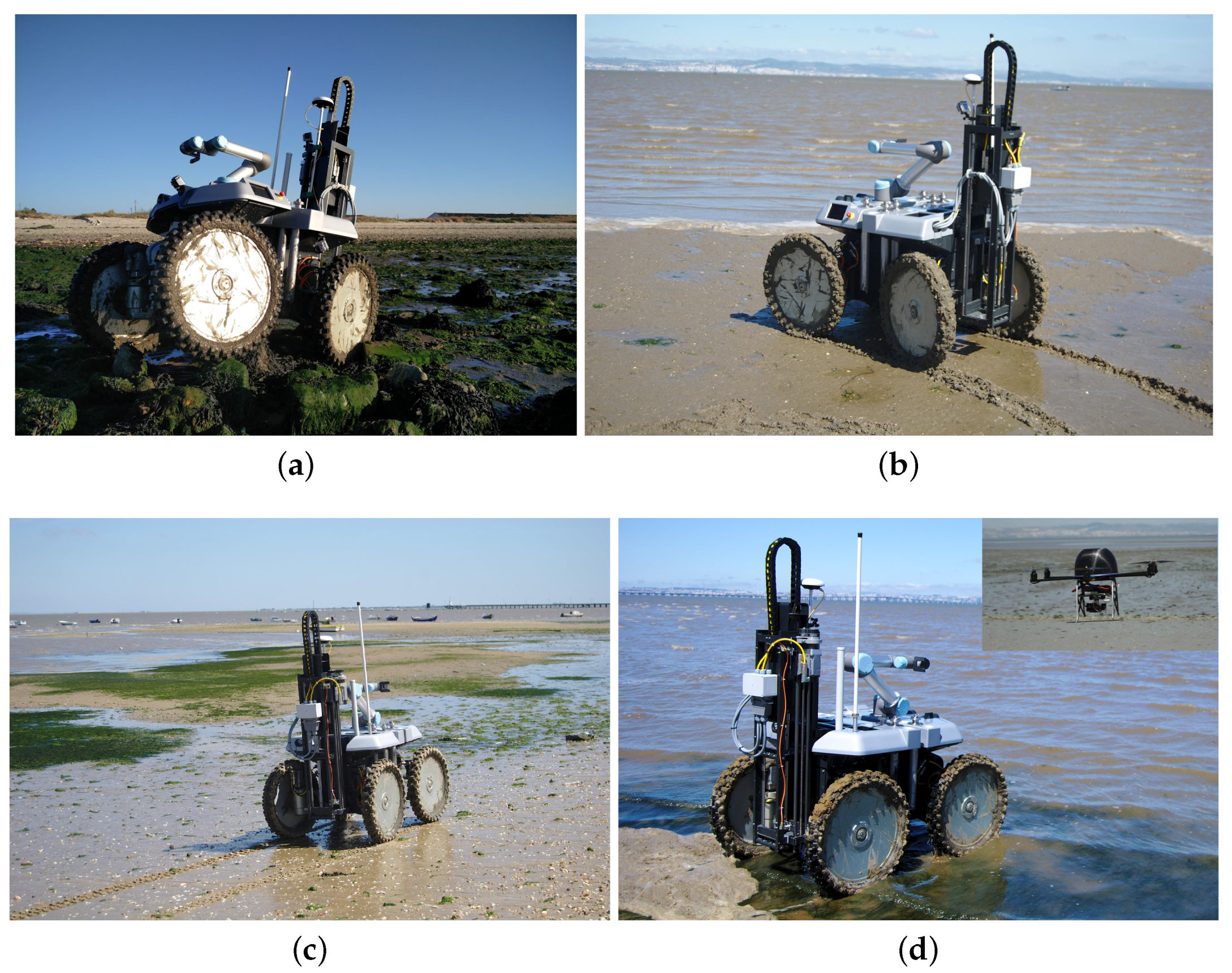
6.3. Testing Ground Mobility
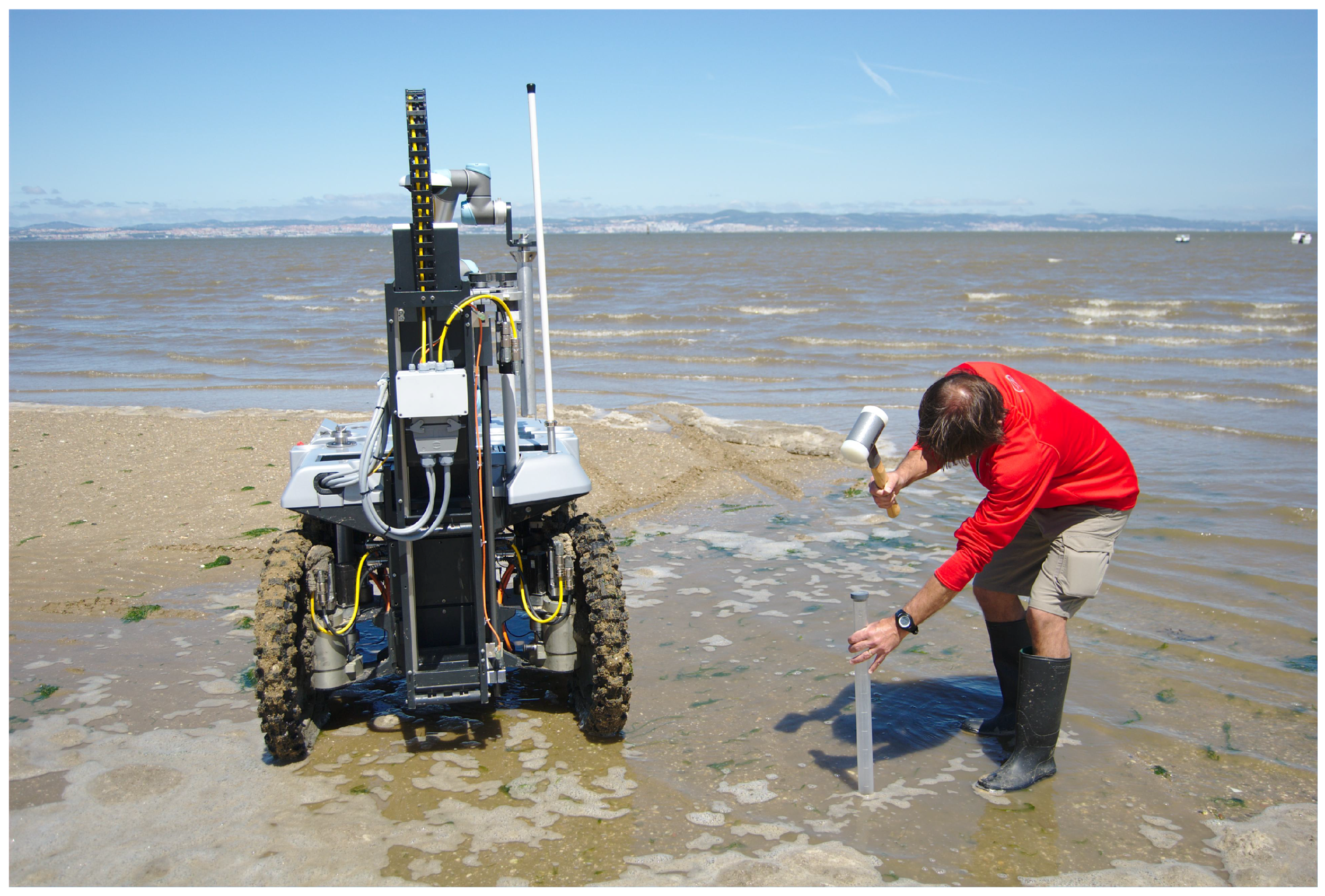
6.4. Drilling Robustness
6.5. Drilling Performance
7. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GUI | Graphical User Interface |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| GPS | Global Positioning System |
References
- Eggleton, J.; Thomas, K.V. A review of factors affecting the release and bioavailability of contaminants during sediment disturbance events. Environ. Int. 2004, 30, 973–980. [Google Scholar] [CrossRef] [PubMed]
- Guedes, M.; Santana, P.; Deusdado, P.; Mendonça, R.; Marques, F.; Henriques, N.; Lourenço, A.; Correia, L.; Barata, J.; Flores, L. ARES-III: A versatile multi-purpose all-terrain robot. In Proceedings of the 2012 IEEE 17th Conference on Emerging Technologies & Factory Automation (ETFA), Krakow, Poland, 17–21 September 2012; pp. 1–8.
- ICRU. Sampling to Estimate Spatial Pattern; Oxford University Press: Oxford, UK, 2006; Volume 2, pp. 45–64. [Google Scholar]
- Deusdado, P.; Pinto, E.; Guedes, M.; Marques, F.; Rodrigues, P.; Lourenço, A.; Mendonça, R.; Silva, A.; Santana, P.; Corisco, J.; et al. An aerial-ground robotic team for systematic soil and biota sampling in Estuarine Mudflats. In Robot 2015: Second Iberian Robotics Conference; Springer: Berlin, Germany, 2016; pp. 15–26. [Google Scholar]
- Smith, L.C. Satellite remote sensing of river inundation area, stage, and discharge: A review. Hydrol. Process. 1997, 11, 1427–1439. [Google Scholar] [CrossRef]
- Mainwaring, A.; Culler, D.; Polastre, J.; Szewczyk, R.; Anderson, J. Wireless sensor networks for habitat monitoring. In Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, GA, USA, 28 September 2002; ACM: New York, NY, USA, 2002; pp. 88–97. [Google Scholar]
- Rundel, P.W.; Graham, E.A.; Allen, M.F.; Fisher, J.C.; Harmon, T.C. Environmental sensor networks in ecological research. New Phytol. 2009, 182, 589–607. [Google Scholar] [CrossRef] [PubMed]
- Song, W.Z.; Huang, R.; Xu, M.; Ma, A.; Shirazi, B.; LaHusen, R. Air-dropped sensor network for real-time high-fidelity volcano monitoring. In Proceedings of the 7th International Conference on Mobile Systems, Applications, and Services, Wroclaw, Poland, 22–25 June 2009; ACM: New York, NY, USA, 2009; pp. 305–318. [Google Scholar]
- Capella, J.V.; Bonastre, A.; Ors, R.; Peris, M. A step forward in the in-line river monitoring of nitrate by means of a wireless sensor network. Sens. Actuators B Chem. 2014, 195, 396–403. [Google Scholar] [CrossRef]
- Li, M.; Liu, Y. Underground coal mine monitoring with wireless sensor networks. ACM Trans. Sens. Netw. 2009, 5, 10. [Google Scholar] [CrossRef]
- Bhadauria, D.; Isler, V.; Studenski, A.; Tokekar, P. A robotic sensor network for monitoring carp in Minnesota lakes. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 3837–3842.
- Bajracharya, M.; Maimone, M.W.; Helmick, D. Autonomy for mars rovers: Past, present, and future. Computer 2008, 41, 44–50. [Google Scholar] [CrossRef]
- Thrun, S.; Thayer, S.; Whittaker, W.; Baker, C.; Burgard, W.; Ferguson, D.; Hähnel, D.; Montemerlo, M.; Morris, A.; Omohundro, Z.; et al. Autonomous exploration and mapping of abandoned mines. IEEE Robot. Autom. Mag. 2004, 11, 79–91. [Google Scholar] [CrossRef]
- Kantor, G.; Fairfield, N.; Jonak, D.; Wettergreen, D. Experiments in navigation and mapping with a hovering AUV. In Field and Service Robotics; Springer: Berlin, Germany, 2008; pp. 115–124. [Google Scholar]
- Kimball, P.; Bailey, J.; Das, S.; Geyer, R.; Harrison, T.; Kunz, C.; Manganini, K.; Mankoff, K.; Samuelson, K.; Sayre-McCord, T.; et al. The whoi jetyak: An autonomous surface vehicle for oceanographic research in shallow or dangerous waters. In Proceedings of the IEEE/OES Autonomous Underwater Vehicles Conference, Oxford, MS, USA, 6–9 October 2014; pp. 1–7.
- Pinto, E.; Marques, F.; Mendonça, R.; Lourenço, A.; Santana, P.; Barata, J. An autonomous surface-aerial marsupial robotic team for riverine environmental monitoring: Benefiting from coordinated aerial, underwater, and surface level perception. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Hanoi, Vietnam, 5–10 December 2014.
- Murphy, R.R.; Peschel, J.; Arnett, C.; Martin, D. Projected needs for robot-assisted chemical, biological, radiological, or nuclear (CBRN) incidents. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), College Station, TX, USA, 5–8 November 2012; pp. 1–4.
- Dunbabin, M.; Marques, L. Robots for environmental monitoring: Significant advancements and applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Marques, F.; Lourenço, A.; Mendonça, R.; Pinto, E.; Rodrigues, P.; Santana, P.; Barata, J. A critical survey on marsupial robotic teams for environmental monitoring of water bodies. In Proceedings of the IEEE OCEANS, Washington, DC, USA, 19–22 October 2015; pp. 1–6.
- Wilkins, J.W. Drilling Sampling/Testing Equipment. U.S. Patent 4,043,407, 6 February 1977. [Google Scholar]
- Philipenko, H. Soil Sampler and Mounting Arrangement. U.S. Patent 4,316,393, 4 June 1982. [Google Scholar]
- Doty, J.G. Bumper Mounted Soil Sampling Device. U.S. Patent 4,333,541, 8 June 1982. [Google Scholar]
- Sneath, R.; Phillips, V.; Price, J. Powered soil samplers for heavy metals and some concepts for the future. J. Agric. Eng. Res. 1989, 44, 159–174. [Google Scholar] [CrossRef]
- Nosewicz, M.A.; Turner, S.B. Portable Soil Sampling Device and Method. U.S. Patent 5,211,248, 18 May 1993. [Google Scholar]
- Wright, N.A.; Wright, H.L. Extended Soil Sampling Head. U.S. Patent 5,950,741, 14 September 1999. [Google Scholar]
- Naber, R.J.; Naber, G.G. Soil Sampling Device. U.S. Patent 6,360,829, 10 October 2002. [Google Scholar]
- Porritt, J.; Scott, H. Vibratory Core Drill Apparatus for the Recovery of Soil or Sediment Core Samples. U.S. Patent 5,004,055, 2 April 1991. [Google Scholar]
- Marker, R. Vehicle Mounted Soil Sampler. U.S. Patent 8,573,074, 5 November 2013. [Google Scholar]
- Bacchelli, A.; Catone, G. A Core Sampling Apparatus. EP Patent App. EP20,100,196,252, 8 October 2011. [Google Scholar]
- Wright, N.A.; Wright, H.L. Mobile Soil Sampling Device. U.S. Patent 5,394,949, 7 March 1995. [Google Scholar]
- Pavlik, J. Mobile Soil Sampling Device With Vacuum Collector. U.S. Patent 7,575,069, 18 August 2009. [Google Scholar]
- Edwards, R.D.; Smith, A.E. Automatic Soil Sampling Machine. U.S. Patent 4,869,115, 13 June 1989. [Google Scholar]
- Hale, G. Soil Sampling “on the Fly”. U.S. Patent 6,016,713, 25 January 2000. [Google Scholar]
- Dagel, J.H.; Hesse, M.B.; Ackerman, R.J. Rotary Soil Probe. U.S. Patent 6,766,865, 27 July 2004. [Google Scholar]
- Burton, J.D. Soil Sampling Apparatus and Method. U.S. Patent 7,827,873, 9 November 2010. [Google Scholar]
- Guzman, R.; Navarro, R.; Ferre, J.; Moreno, M. RESCUER: Development of a modular chemical, biological, radiological, and nuclear robot for intervention, sampling, and situation awareness. J. Field Robot. 2015. [Google Scholar] [CrossRef]
- Winter, A.G.; Deits, R.L.; Dorsch, D.S.; Hosoi, A.E.; Slocum, A.H. Teaching roboclam to dig: The design, testing, and genetic algorithm optimization of a biomimetic robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 4231–4235.
- Darukhanavala, C.; Lycas, A.; Mittal, A.; Suresh, A. Design of a bimodal self-burying robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 5600–5605.
- Carvalho, F.P.; Oliveira, J.M.; Silva, L.; Malta, M. Radioactivity of anthropogenic origin in the Tejo Estuary and need for improved waste management and environmental monitoring. Int. J. Environ. Stud. 2013, 70, 952–963. [Google Scholar] [CrossRef]
- Caetano, M.; Madureira, M.J.; Vale, C. Metal remobilization during resuspension of anoxic contaminated sediment: Short-term laboratory study. Water Air Soil Pollut. 2003, 143, 23–40. [Google Scholar] [CrossRef]
- Santana, P.; Cândido, C.; Santos, P.; Almeida, L.; Correia, L.; Barata, J. The Ares robot: Case study of an affordable service robot. In Proceedings of the European Robotics Symposium (EUROS), Diplomat Hotel Prague, Czech Republic, 26–28 March 2008; Springer: Berlin, Germany, 2008; pp. 33–42. [Google Scholar]
- Marques, F.; Santana, P.; Guedes, M.; Pinto, E.; Lourenço, A.; Barata, J. Online self-reconfigurable robot navigation in heterogeneous environments. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Taipei, Taiwan, 28–31 May 2013; pp. 1–6.
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An open-source robot operating system. In Proceedings of the ICRA Open-Source Software Workshop, Kobe, Japan, 17 May 2009.
- Mace, J. Rosbridge. Available online: http://wiki.ros.org/rosbridge_suite (accessed on 7 September 2015).
- Santana, P.F.; Cândido, C.; Santos, V.; Barata, J. A motion controller for compliant four-wheel-steering robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Kunming, China, 17–20 December 2006; pp. 532–537.
- Sucan, I.A.; Chitta, S. MoveIt! Available online: http://moveit.ros.org/ (accessed on 7 September 2015).
- Arducopter-Open-Source Multicopter Controller. Available online: http://www.arducopter.co.uk/ (accessed on 3 September 2015).
- Photo Stitcher, H.P. D’Angelo, Pablo. Available online: http://hugin.sourceforge.net (accessed on 7 September 2015).
- Axis Communications AB. VAPIX Version 3 Video Streaming API. 2013. Available online: http://www.axis.com/files/manuals/vapix_video_streaming_52937_en_1307.pdf (accessed on 7 September 2015).
- Santana, P.; Correia, L.; Salgueiro, M.; Santos, V.; Barata, J. A Knowledge-based component for human-robot teamwork. In Proceedings of the International Conference on Informatics in Control, Automation and Robotics (ICINCO), Funchal, Portugal, 11–15 May 2008; pp. 228–233.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drilling Phase | Extraction Phase | |||
|---|---|---|---|---|
| Area | Linear Actuator | Rotation Actuator | Linear Actuator | Rotation Actuator |
| N/A | ||||
| N/A | ||||
| N/A | ||||
| N/A | ||||
| N/A | ||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deusdado, P.; Guedes, M.; Silva, A.; Marques, F.; Pinto, E.; Rodrigues, P.; Lourenço, A.; Mendonça, R.; Santana, P.; Corisco, J.; et al. Sediment Sampling in Estuarine Mudflats with an Aerial-Ground Robotic Team. Sensors 2016, 16, 1461. https://doi.org/10.3390/s16091461
Deusdado P, Guedes M, Silva A, Marques F, Pinto E, Rodrigues P, Lourenço A, Mendonça R, Santana P, Corisco J, et al. Sediment Sampling in Estuarine Mudflats with an Aerial-Ground Robotic Team. Sensors. 2016; 16(9):1461. https://doi.org/10.3390/s16091461
Chicago/Turabian StyleDeusdado, Pedro, Magno Guedes, André Silva, Francisco Marques, Eduardo Pinto, Paulo Rodrigues, André Lourenço, Ricardo Mendonça, Pedro Santana, José Corisco, and et al. 2016. "Sediment Sampling in Estuarine Mudflats with an Aerial-Ground Robotic Team" Sensors 16, no. 9: 1461. https://doi.org/10.3390/s16091461
APA StyleDeusdado, P., Guedes, M., Silva, A., Marques, F., Pinto, E., Rodrigues, P., Lourenço, A., Mendonça, R., Santana, P., Corisco, J., Almeida, S. M., Portugal, L., Caldeira, R., Barata, J., & Flores, L. (2016). Sediment Sampling in Estuarine Mudflats with an Aerial-Ground Robotic Team. Sensors, 16(9), 1461. https://doi.org/10.3390/s16091461