1. Introduction
In 1965 Zadeh first proposed the concept of a fuzzy set (FS) [
1]. His vision was set on giving more control over decision making, and with his fuzzy logic an immeasurable amount of decision- making situations could be easily modeled whereas hard logic, true or false, could not. This opened a new era in decision making with FSs that have been evolving since its initial days, first starting out with Type-1 Fuzzy Logic Systems (T1FLS), then coming into Interval Type-2 Fuzzy Logic Systems (IT2FLS) and finally arriving to the current state of advanced form of FS, Generalized Type-2 Fuzzy Logic Systems (GT2FLS).
In recent years, many works on control system stabilization have been published [
2,
3,
4]. However, all these control design methods require the exact mathematical models of the physical systems, which may not be available in practice. On the other hand, fuzzy control has been successfully applied for solving many nonlinear control problems. Some works related in automatic control are [
5,
6,
7,
8,
9,
10]. Fuzzy logic or multi-valued logic is based on fuzzy set theory proposed in [
1,
11], which helps us in modeling knowledge, through the use of if-then rules. In Interval Type-2 fuzzy systems, the membership functions can now return a range of values, which vary depending on the uncertainty involved in not only the inputs, but also in the same membership functions [
12,
13]. In Generalized Type-2 fuzzy systems the uncertainty is depicted by a volume, and as such, being more capable of handling uncertainty in the system. As GT2FS research is still fairly new, not much has been done as of yet, some examples of advancements are shown in computing the centroid by means of the centroid-flow algorithm [
14], definition of the footprint of uncertainty [
15], enhanced type-reduction [
16], conversion from IT2FS to GT2FS [
3], computing with words for discrete GT2FS [
17], and formation of GT2FS based on information granule numerical evidence [
18].
In 1975 Mamdani and Assilian were the first to develop fuzzy logic controllers (FLCs) which, have been successfully applied in many real word applications [
19], including cement kiln controllers, water treatment systems, and automatic train operation control systems, industrial tools such as robot arms, as well as in home appliances such as washing machines, vacuums, rice cookers, air conditioners, microwaves, and refrigerators. There are two main advantages of FLC over other nonlinear controllers. The first is the ability to incorporate the linguistic terms of input-output variables by using fuzzy membership functions. Second, it can more effectively handle the uncertainties in the inputs and state measurements [
20,
21]. Fuzzy controllers have the advantage that they can be adaptive when disturbances in the model or the plant are present. Usually fuzzy controllers are used to test the bio-inspired algorithms and observe their performance, for example; some works presented in this regard can be found in [
22,
23,
24,
25,
26,
27].
Optimization is a science which finds the best values of the parameters of a problem that may take under specified conditions. Optimization, in its most simple way, aims to obtain the relevant parameter values, which enable an objective function to generate a
minimum or a
maximum value depending on the problem. The objective function is the main component of an optimization problem [
28].
The main idea of dynamic adjustment of parameters in algorithms or techniques involved with the optimization is of key interest to some researchers; for example, in [
29] a fuzzy parameter adaptation in optimization of neural net training is presented, in [
30] a fuzzy adaptive particle swarm optimization is presented, in [
31] a nonlinear inertia weight variation for dynamic adaptation in particle swarm optimization is presented, in [
32] an optimal design of fuzzy classification systems using PSO with dynamic parameter adaptation through fuzzy logic is presented, in [
33] a differential evolution with dynamic adaptation of parameters of the optimization of fuzzy controller is presented. This is why we consider as the main contribution of this research, the use of fuzzy sets as a powerful technique to define the appropriate alpha and beta parameters in the BCO algorithm and thereby improve its performance for the solution of complex problems.
The Bee Colony Optimization (BCO) metaheuristic has been successfully applied to various engineering and management problems by Teodorović et al. [
34,
35,
36]. It has been shown that the BCO algorithm is a good technique in solving complex problems, and to mention some current research in this regard; in [
37] a bee colony optimization algorithm applied to job shop scheduling is presented by Chong et al., another work can be found in [
38] where an efficient bee colony optimization algorithm for the traveling salesman problem using frequency-based pruning is presented by Wong et al., in [
39] a bee colony optimization based-fuzzy logic-PID control design of electrolyzer for microgrid stabilization presented by Chaiyatham et al. and in [
40] the design and development of an intelligent control by using bee colony optimization technique is presented by Tiacharoen et al.
This paper considers several experiments in the simulation of control problems with a type-1 fuzzy logic controller (T1FLC) and BCO for minimizing the error in the simulation of the trajectory controlling of an autonomous mobile robot. In this case, the fuzzy bee colony optimization shows better results based on error minimization when the generalized type-2 fuzzy logic system is used to adapt the alpha and beta parameters for BCO. We realized the comparison with the Original BCO and the Fuzzy BCO algorithm, using the three type fuzzy sets, for observing the behavior and the improvement that Fuzzy BCO provides when different levels of noise are applied in the model, in this case GT2FLS can handle the uncertainty to get a better stabilization of the autonomous mobile robot.
The rest of the paper is organized as follows.
Section 2 describes some basic concepts of fuzzy sets and briefly describes generalized type-2 fuzzy logic systems.
Section 3 shows fuzzy logic controllers.
Section 4 outlines the problem statement that is used in the simulations.
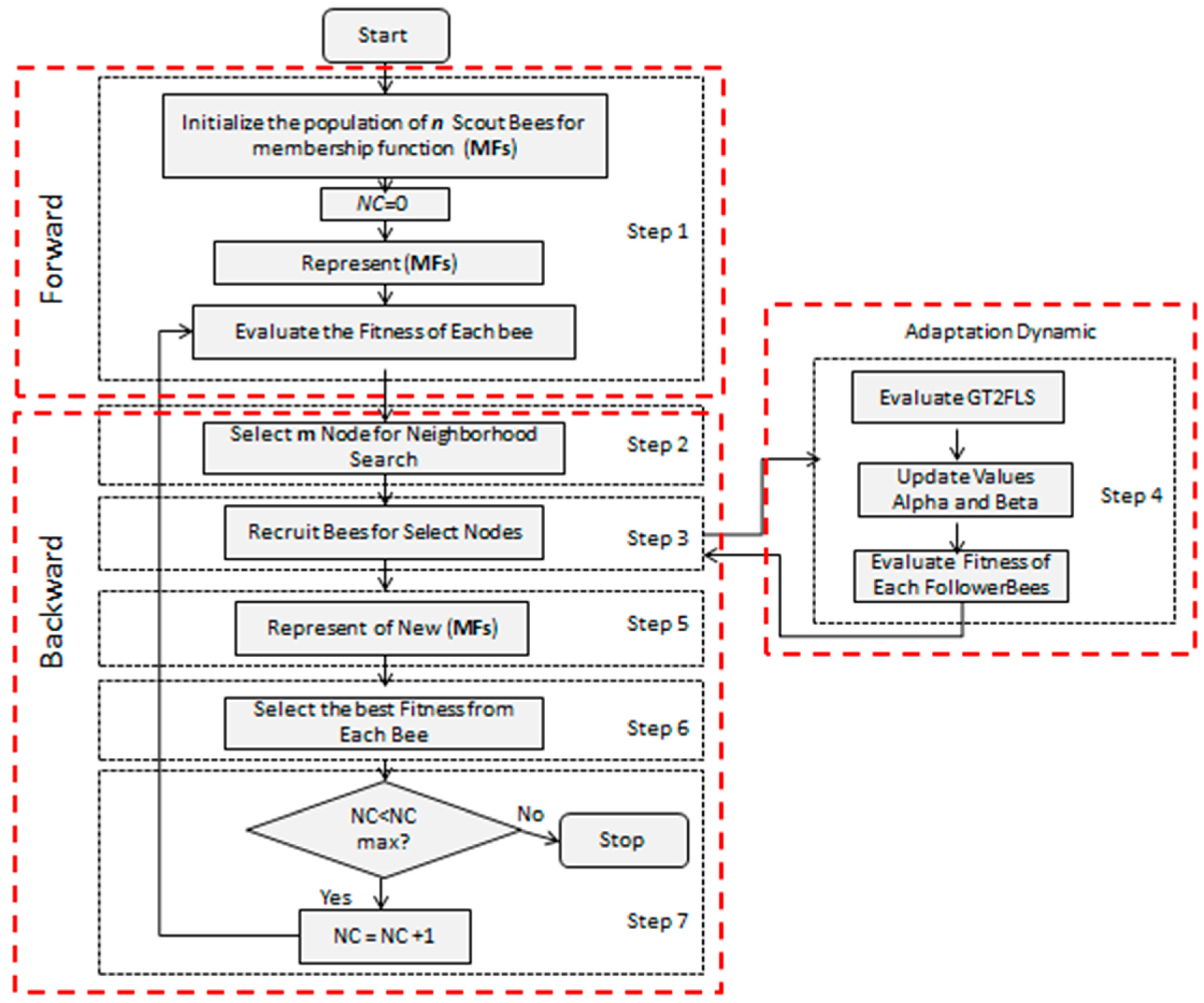
Section 5 describes the traditional bee colony optimization (BCO) algorithm and fuzzy BCO.
Section 6 shows the simulation results with the dynamic adaptation in the parameters of BCO with different fuzzy systems.
Section 7 shows the discussion of results. Finally,
Section 8 offers some conclusions of this work.
6. Results
Experimentation was performed with various external perturbation scenarios. Two specific noise generators are used: band-limited white noise and pulse generated noise. The height of the Power Spectral Density of the band-limited white noise of power is set to (0.5, 1), sample time of (0.5, 1), and delay of 1000; and the amplitude is set to (0.5, 1), period in seconds of 1, pulse width (%) is set to (0.5, 1) and phase delay is set to 1000, respectively, for the pulse generated noise.
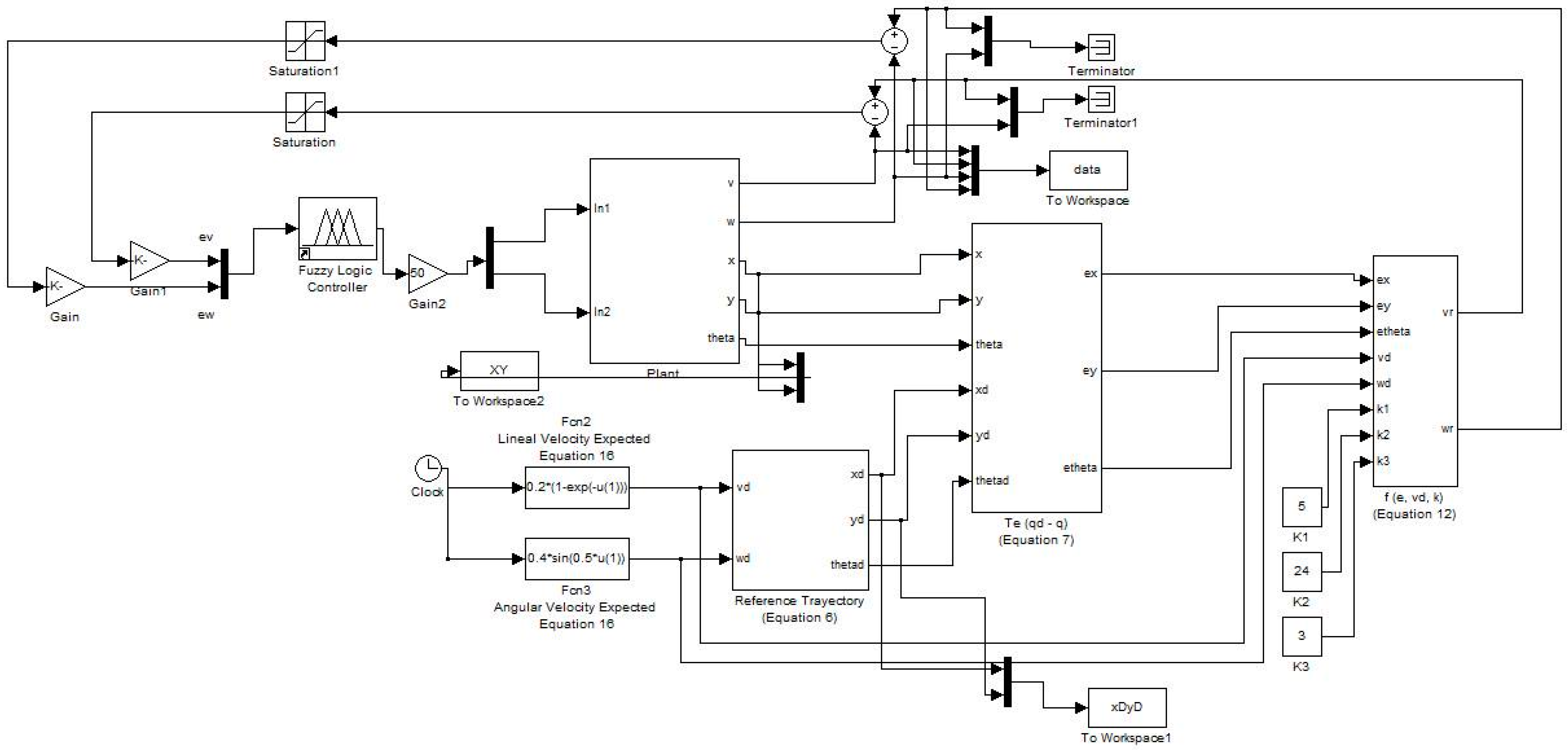
We use the problem of controlling a trajectory of an autonomous mobile robot, the test criteria is a series of Performance Indices; where the Integral Square Error (ISE), Integral Absolute Error (IAE), Integral Time Squared Error (ITSE), Integral Time Absolute Error (ITAE) and Root Mean Square Error (RMSE) are used, respectively shown in Equations (23)–(27):
The BCO algorithm was configured with the parameters listed in
Table 4.
The results of the simulations for the problem are presented in
Table 5, which shows the errors for each performance index of 30 experiments for the autonomous mobile robot controller using the traditional BCO, and the
alpha and
beta values are set to 0.5 and 2.5, respectively. The results in
Table 5 were ordered with respect to the minimization of the MSE.
In
Table 5 can be noted that the best value for the MSE was of 0.002. The simulation results in
Table 5 are obtained with the traditional BCO. The main goal of the experiments is to observe the values of alpha and beta in the algorithm to compare with the results of the proposed method, as well as to observe the results with the traditional BCO algorithm with the considered problem.
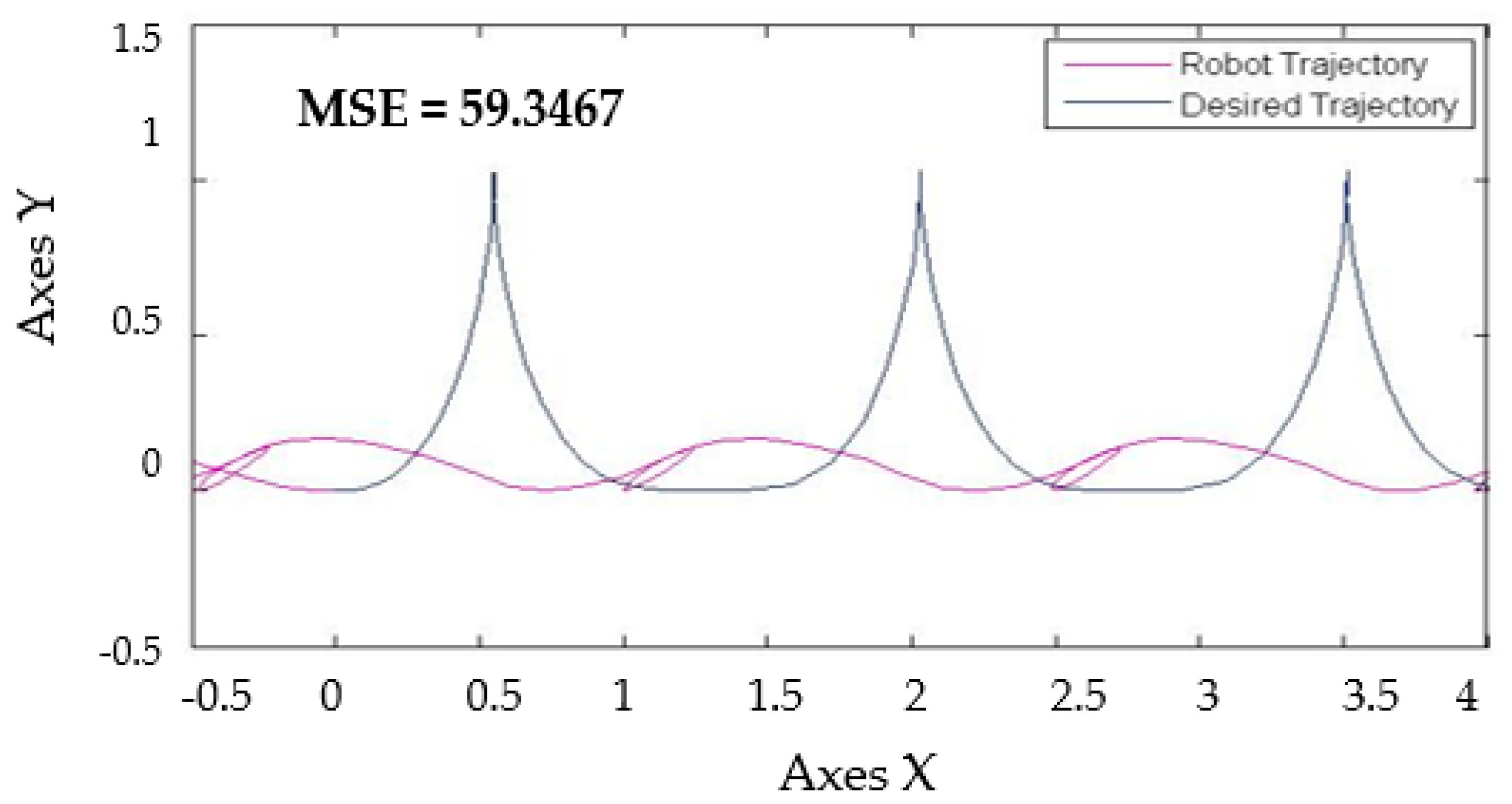
Figure 15 shows the behavior of the MSE when different levels of noise are applied in the traditional BCO.
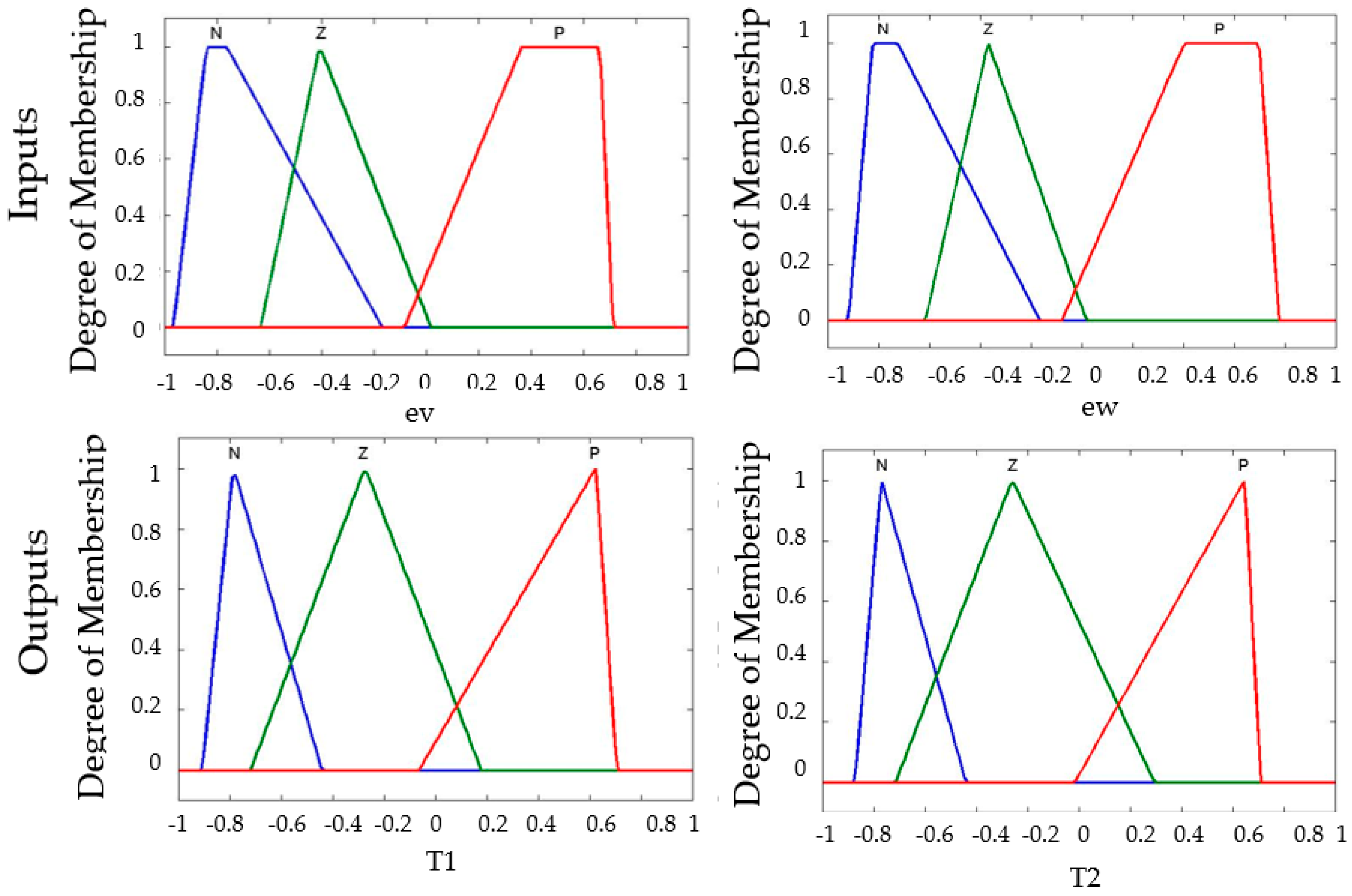
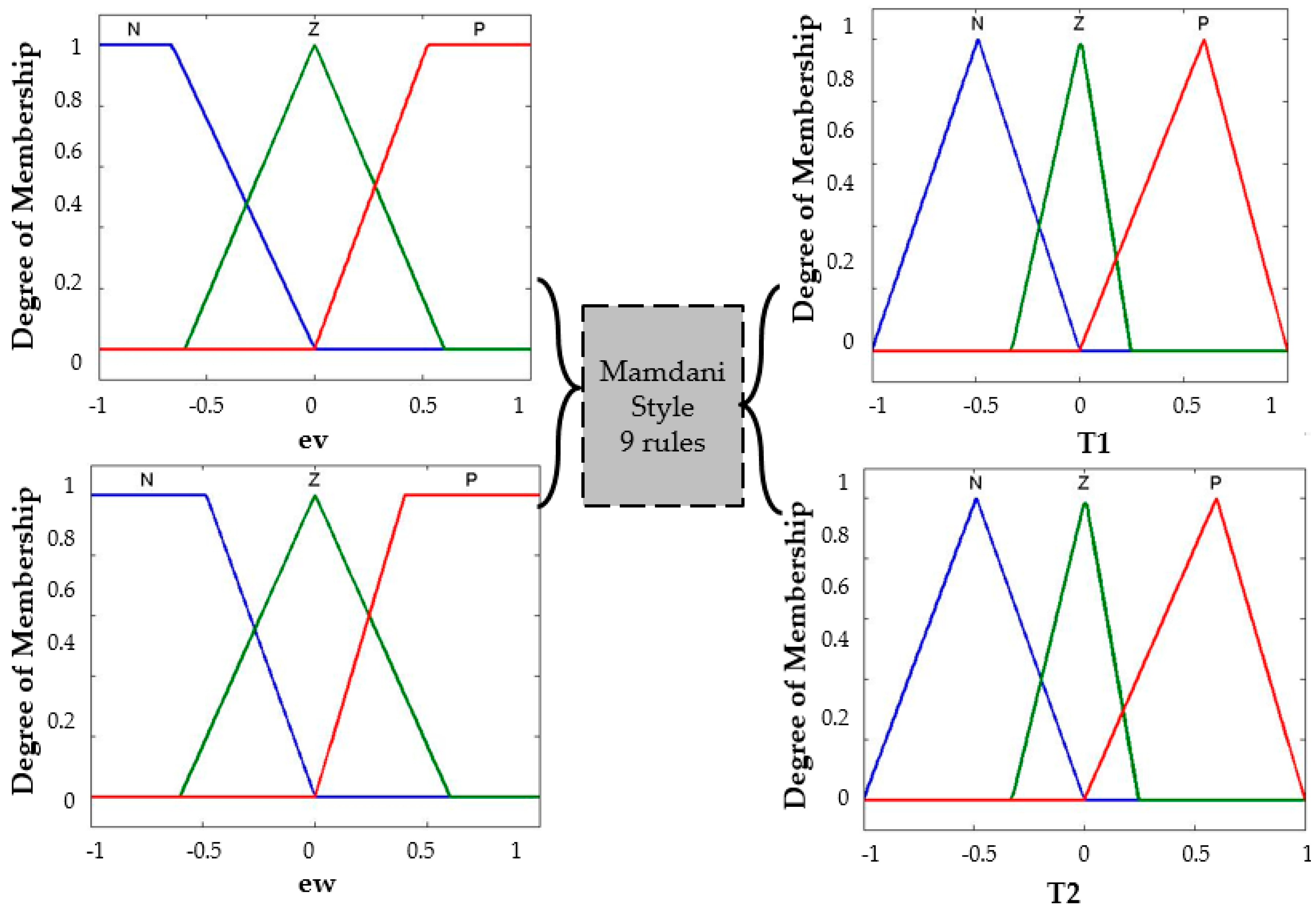
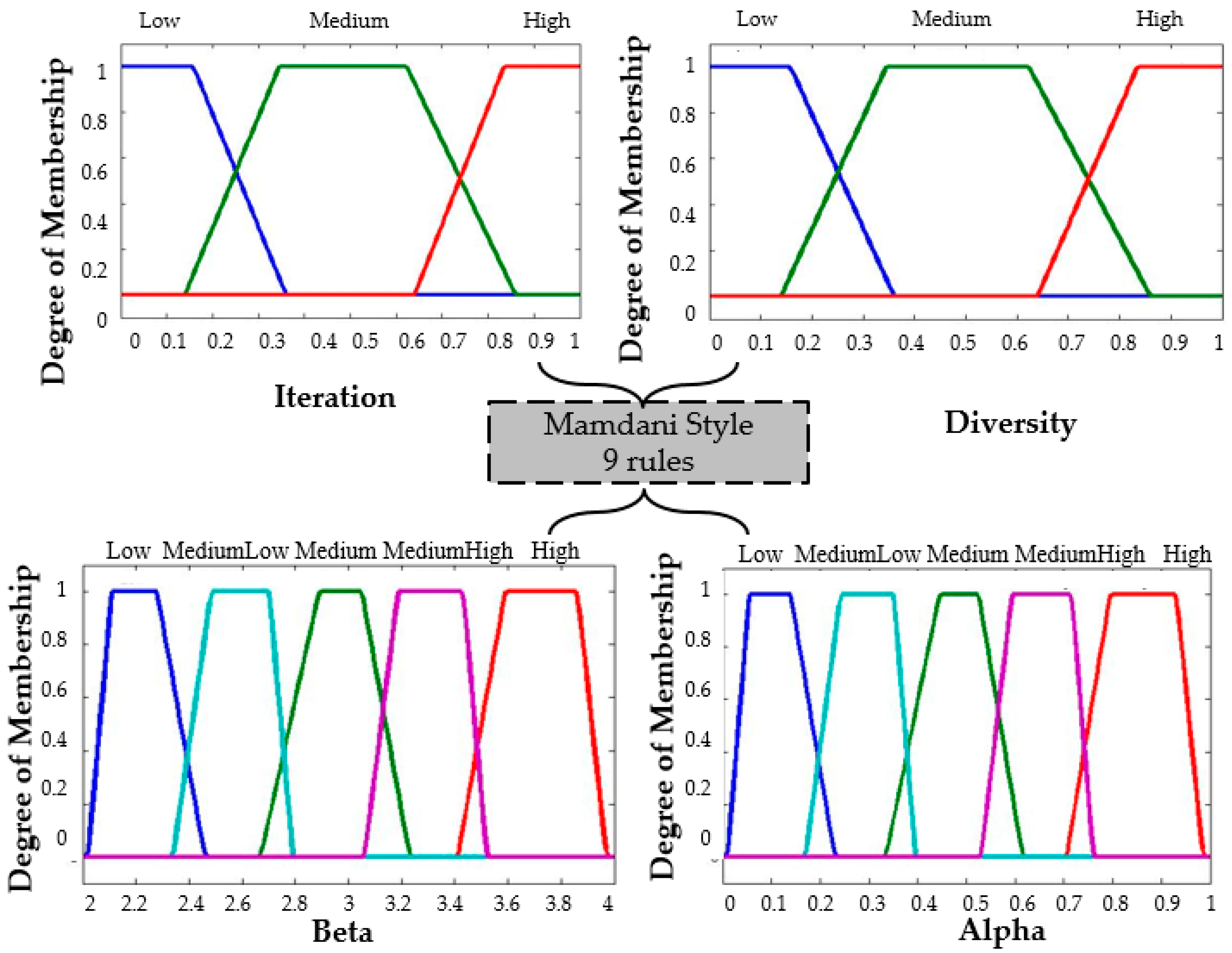
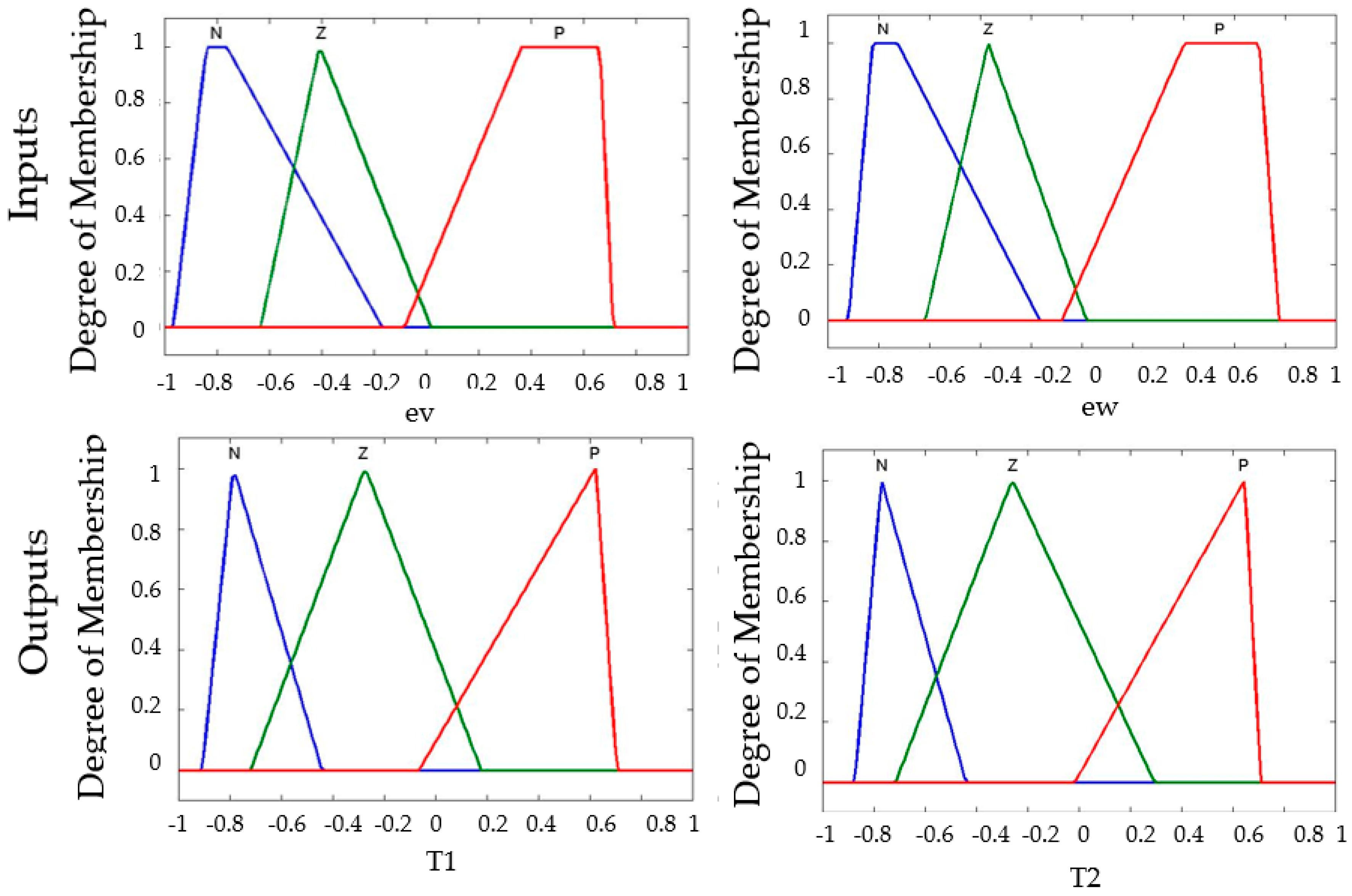
With the base FLS the distribution of membership functions detailed in
Figure 9. The behavior in the simulations is shown in
Figure 16 with a perturbation in the model of pulse generated with value of 1.
Figure 17 shows similar simulation errors when the levels of noise are applied in the model, the stabilization in the trajectory in autonomous mobile robot is shown in
Figure 17 with the best MSE using the two types of perturbations in the model with the value of 1 and the traditional BCO.
Table 6 shows the average of 30 experiments, standard deviation (SD), the best and the worst of the simulation errors for the four methods: Traditional BCO, Fuzzy BCO with Type-1 Fuzzy Logic System (FLS), Fuzzy BCO with Interval Type-2 FLS and Fuzzy BCO with Generalized Type-2 FLS without applying perturbation in the model. We used the MSE as the fitness function in the Bee Colony Optimization algorithm.
Table 6 shows that using the traditional method the average MSE was of 5.090 and with Generalized Type-2 FLS was 6.118 using the dynamic adjustment in
alpha and
beta, which tells us that if we do not apply perturbation in the model the dynamic adjustment do not provide better results compared to the traditional BCO for the stabilization of the autonomous mobile robot. The
alpha and
beta values found by Fuzzy BCO with GT2FLS are 2.601 and 0.467, respectively. We applied perturbation in the model, and this is a way of analyzing uncertainty in the fuzzy sets.
Table 7 shows results with the pulse generator with a value of 0.5 for each methodology used.
Table 7 shows that using the traditional method with perturbation in the model the average MSE was 2.601 and with Generalized Type-2 FLS was 2.467 using the dynamic adjustment in alpha and beta values, which tells us that if we apply perturbation in the model the dynamic adjustment produces better results compared to the traditional BCO for the stabilization of the autonomous mobile robot. The minimum value of MSE was 0.001 for the Fuzzy BCO with Type-1 FLS. The best alpha and beta values found by GT2FLS are 2.601 and 0.467, respectively.
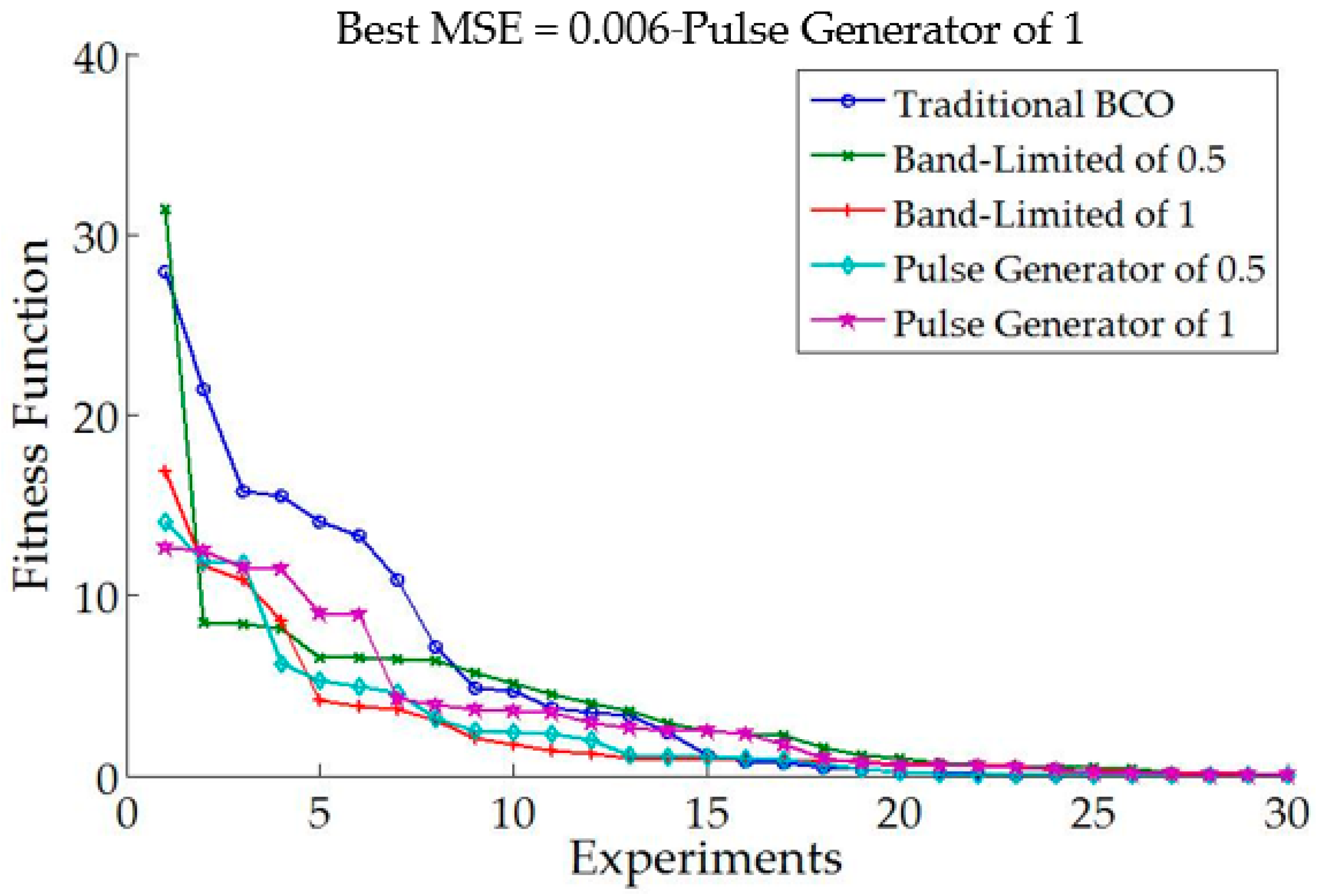
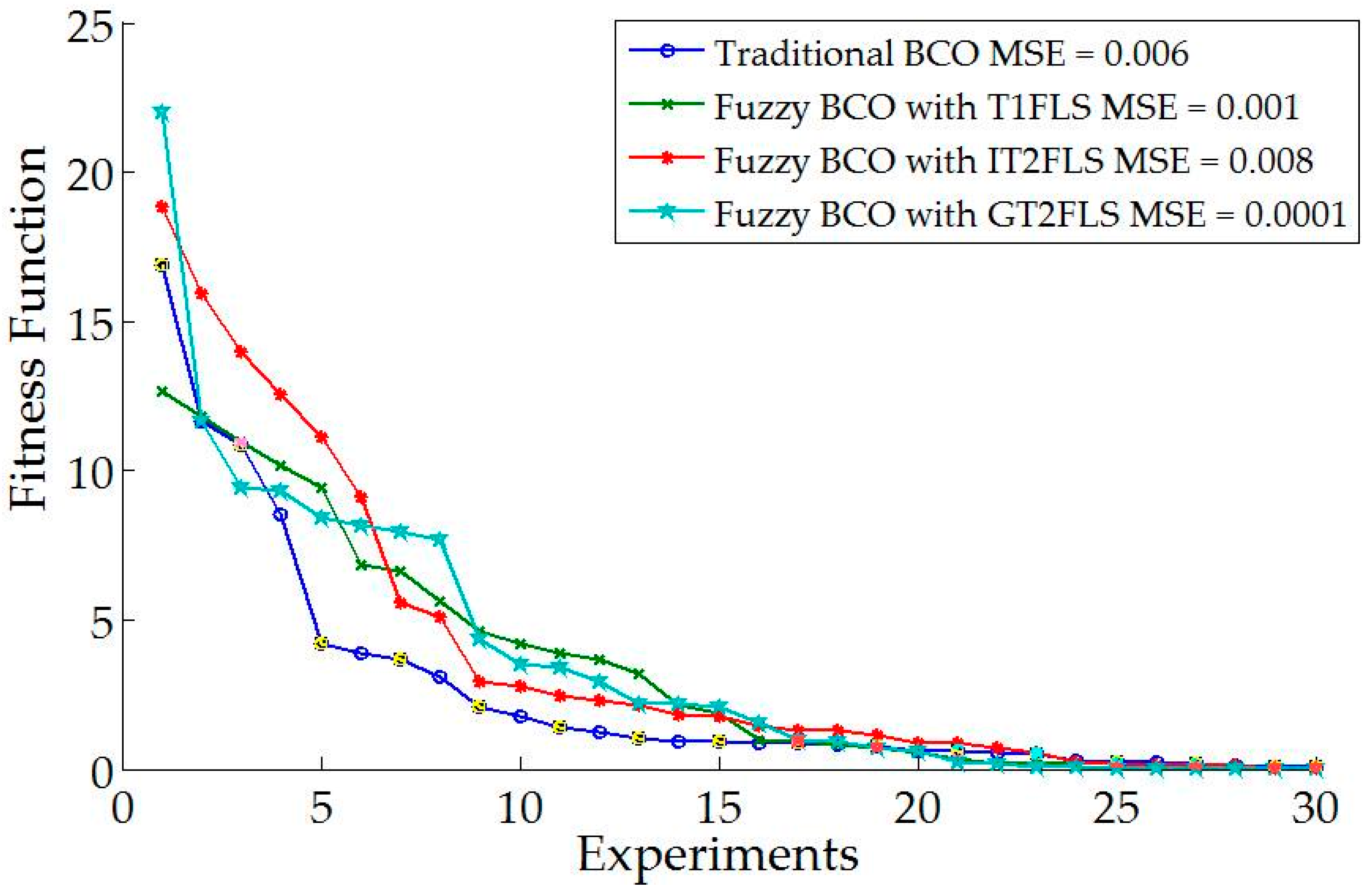
Figure 18 shows comparative results when applying a pulse generator with a value of 1 in the model. The MSE is shown for comparison.
Figure 18 shows that the best error is found by GT2FLS with a value of 0.0001. It is important to mention that GT2FLS starts with a low error, but the stabilization in the trajectory of the autonomous mobile robot is high compared to other methods.
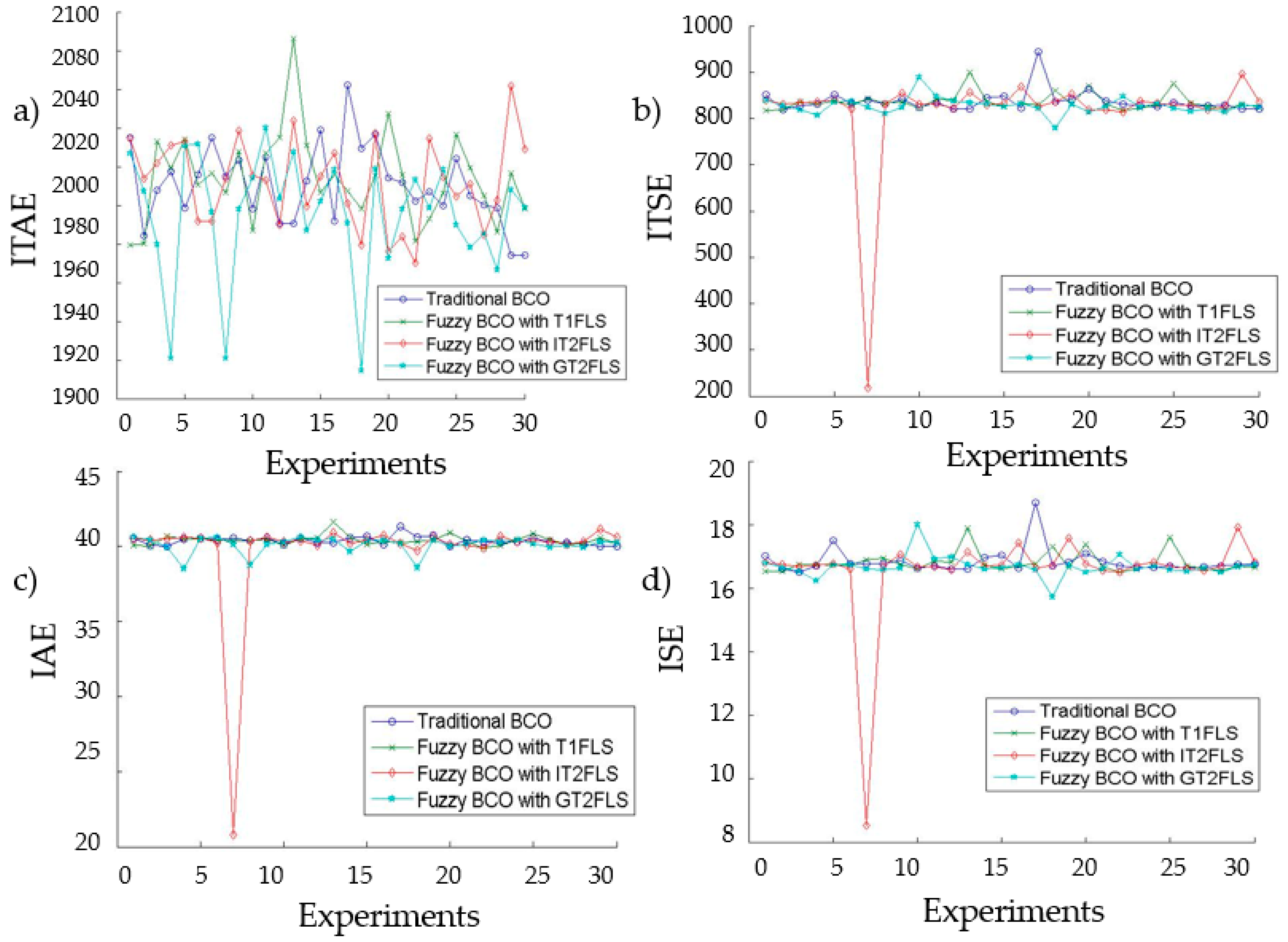
As an example of the relation between noise and the FLS performance,
Figure 19 shows these relations for each type of performance index used, where in all accounts FBCO with GT2FLS is somewhat better with respect to Fuzzy BCO with IT2FLS and then to Fuzzy BCO with T1FLS.
Two scenarios in the experiments were changed, the first is to observe the behavior of the Interval Type-2 FLS, a reduction in the size of the Footprint Uncertainty (FOU) to a value of 0.5 was realized. In experiments previously performed, the value of FOU was set to 0.9. The second is to minimize the value of the FOU to 0.5 and also, increase the value of the volume (depth) of a generalized membership function, the value set in previous experiments was of 0.5, for these experiments we change it to 1, which indicates that we have more secondary functions memberships to evaluate with the Generalized Type-2 FLS. The averages of 30 experiments are presented in
Table 8.
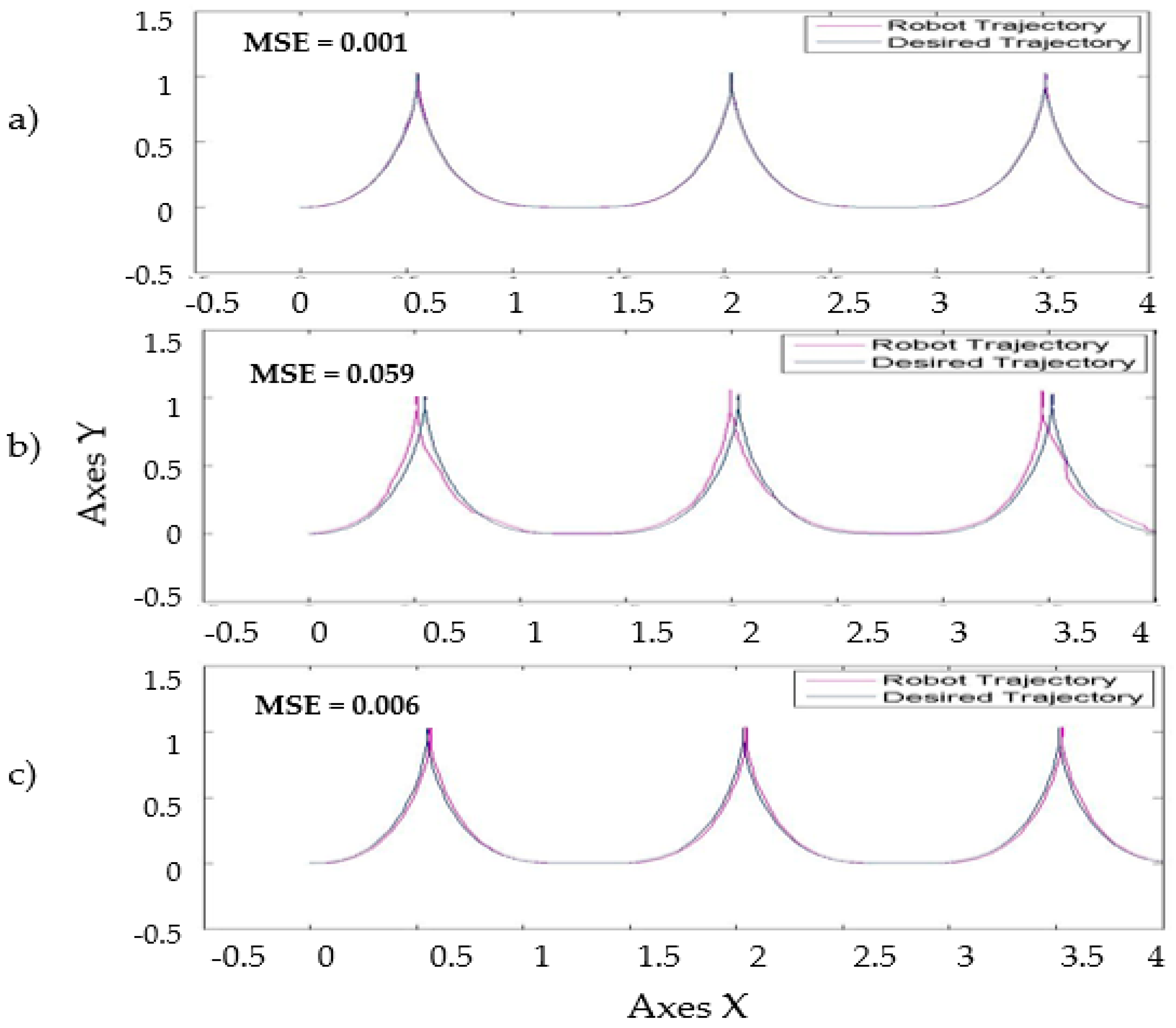
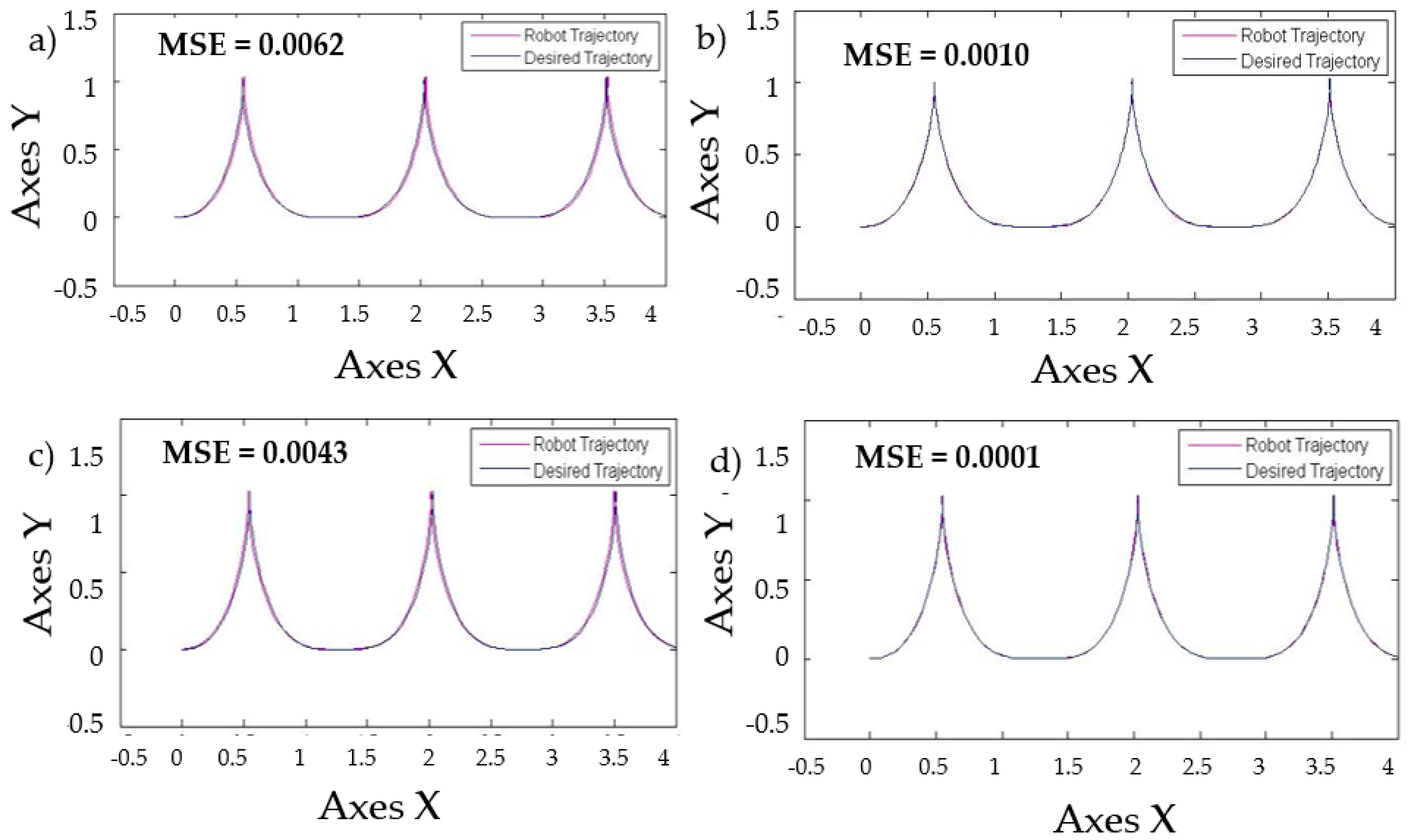
Table 8 shows that when levels of noise are used in the model, the stabilization of the autonomous mobile robot is better with the Fuzzy BCO with GT2FLS compared to the traditional BCO. The standard deviation is smaller, which indicates that the results are similar. The best MSE error found was by FBCO-GT2FLS with a value of 0.0001. The behavior of the trajectory of the autonomous mobile robot is shown in
Figure 20 with perturbation (pulse generator of 1) in the model. The Best MSE is also shown in
Figure 20.
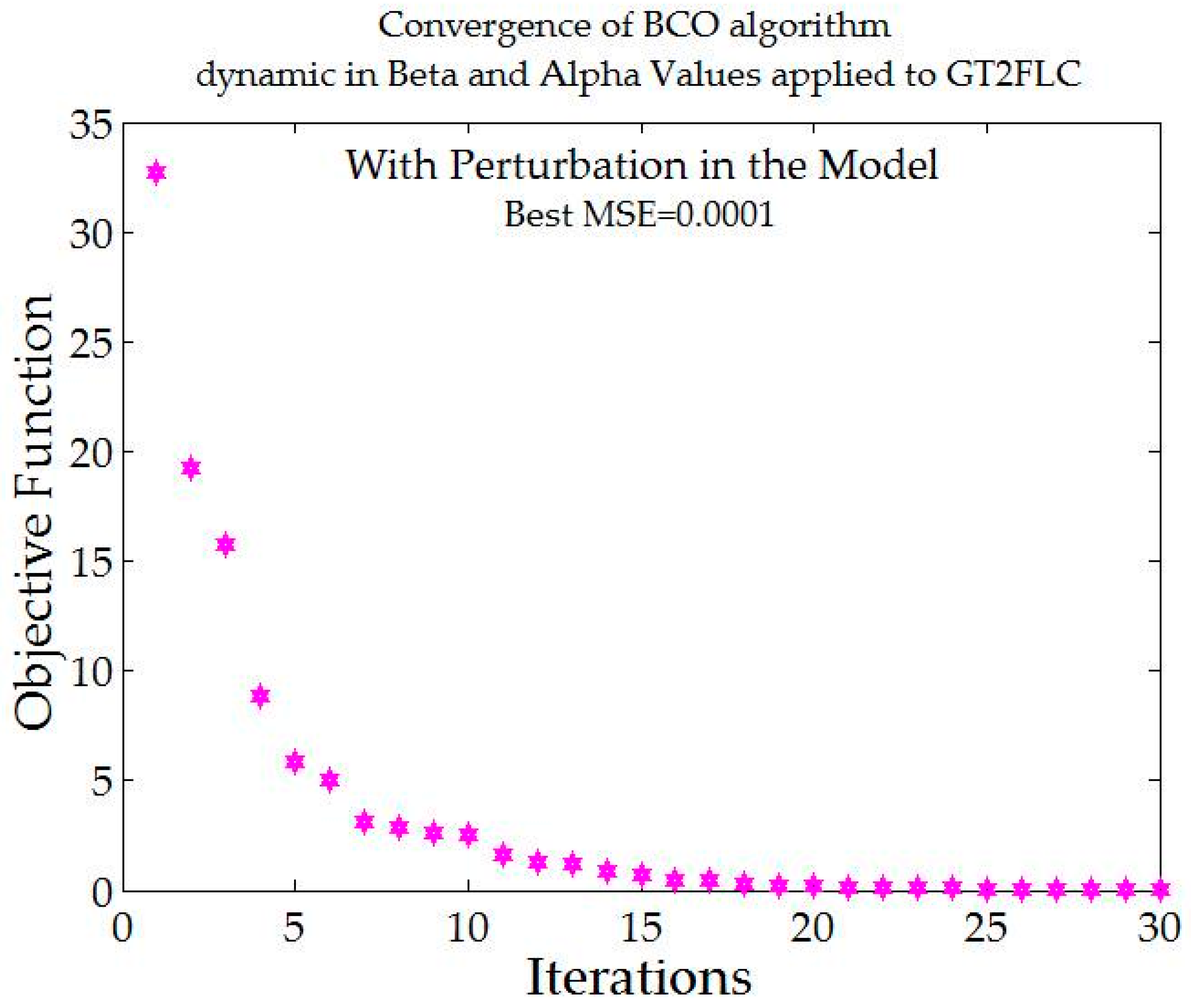
The convergence of the Fuzzy BCO with Generalized Type-2 FLS with dynamic alpha and beta values is shown in
Figure 21.
The best distribution in membership functions found by FBCO with Generalized Type-2 FLS is shown in
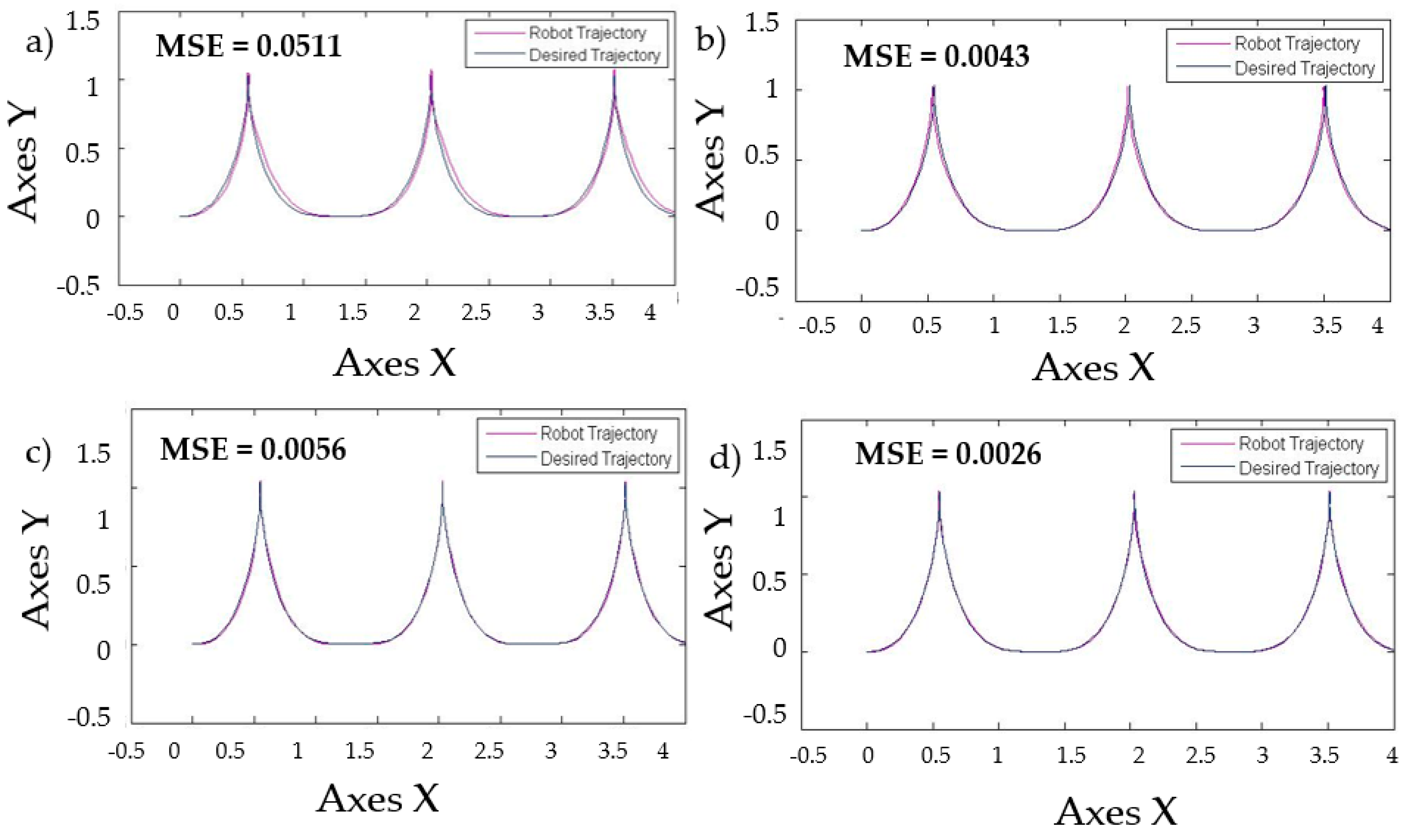
Figure 22. With the objective to observe the performance that a Generalized Type-2 FLS has with respect to IT2FLS, T1FLS and Traditional BCO. The best FLS found by each method using simulations without perturbation in the model that was selected. We added more perturbation such as; a pulse generator of amplitude of 5 and pulse width of 5. The result of trajectory in the autonomous mobile robot is shown in
Figure 23.
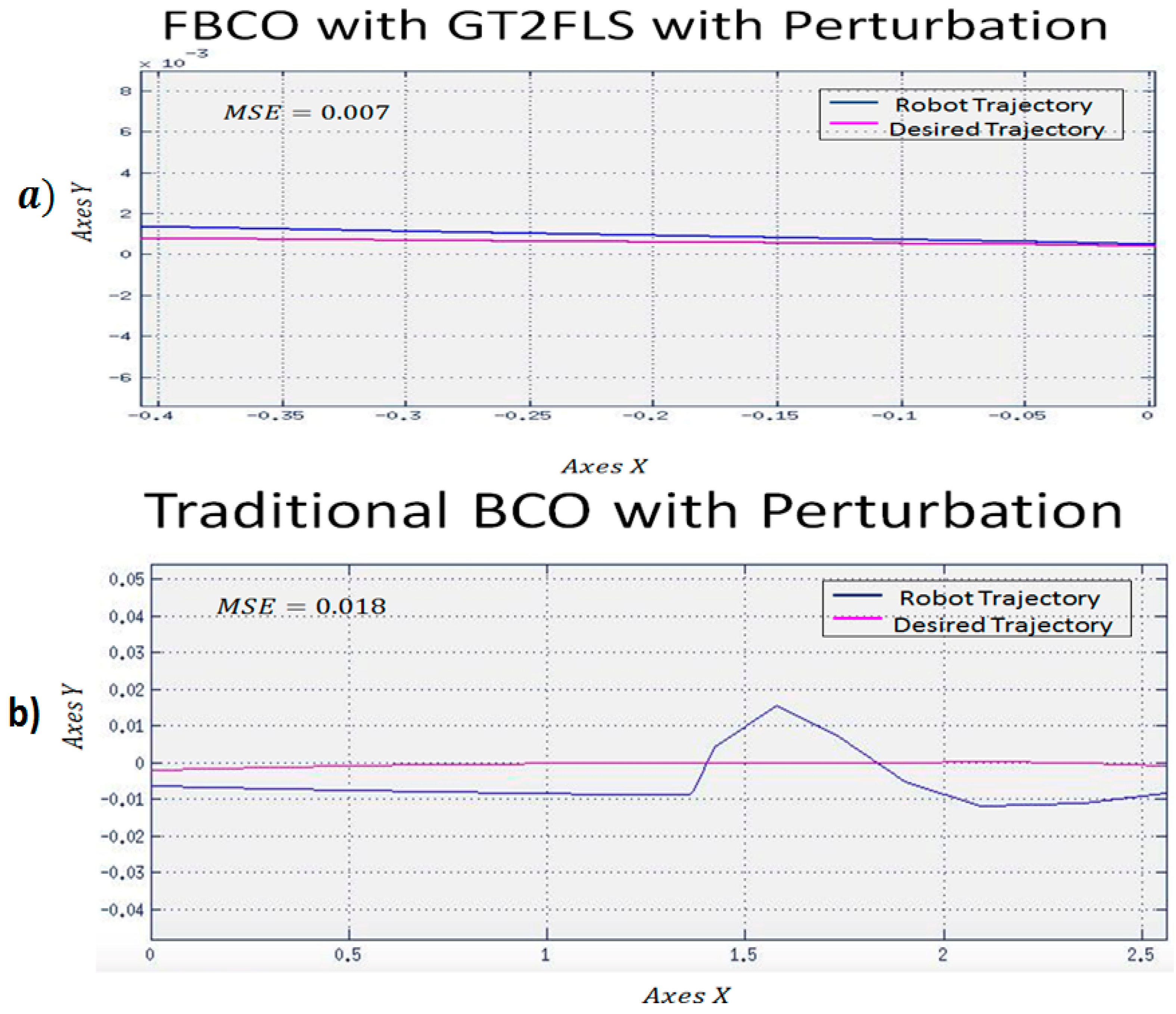
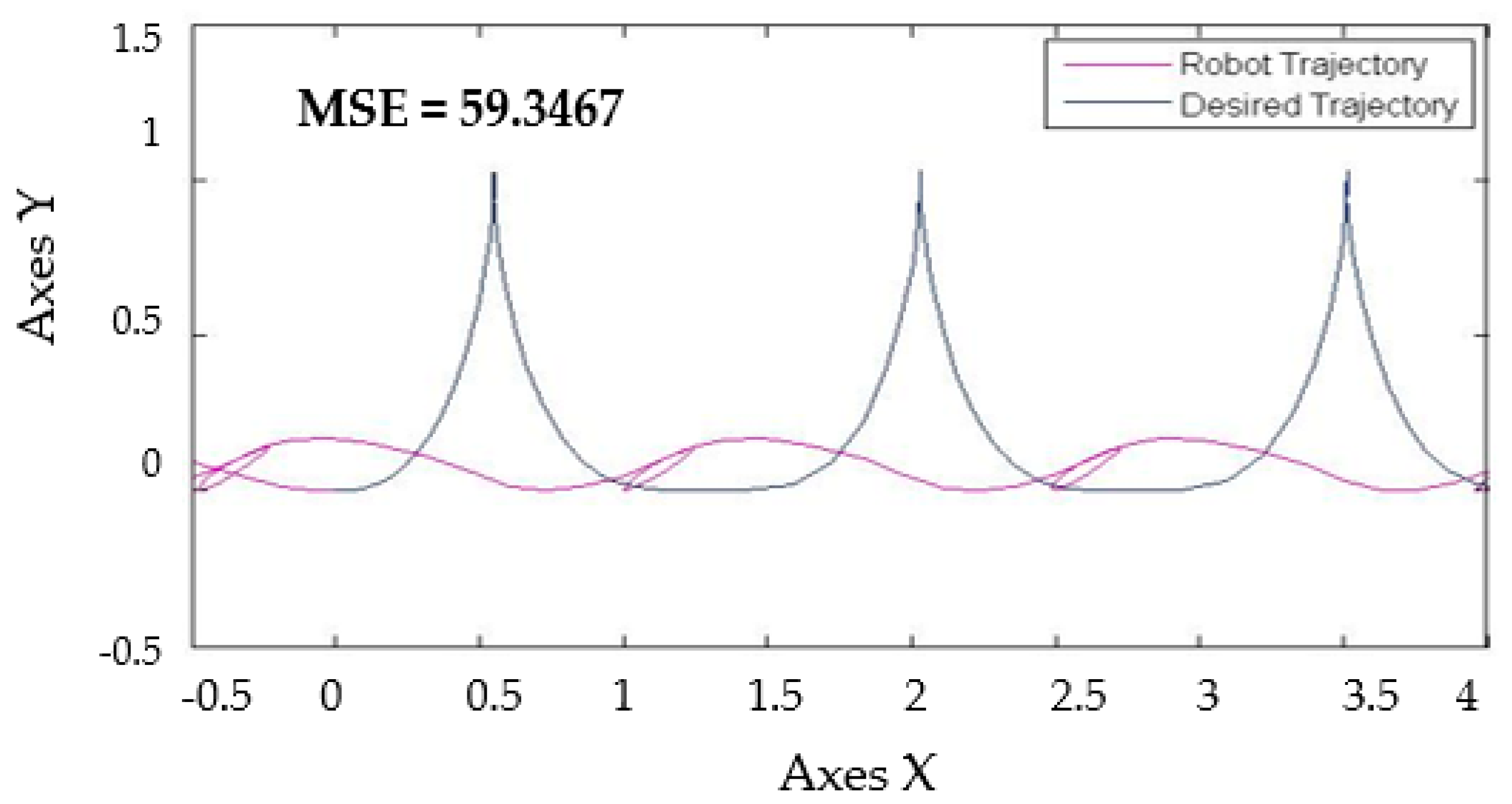
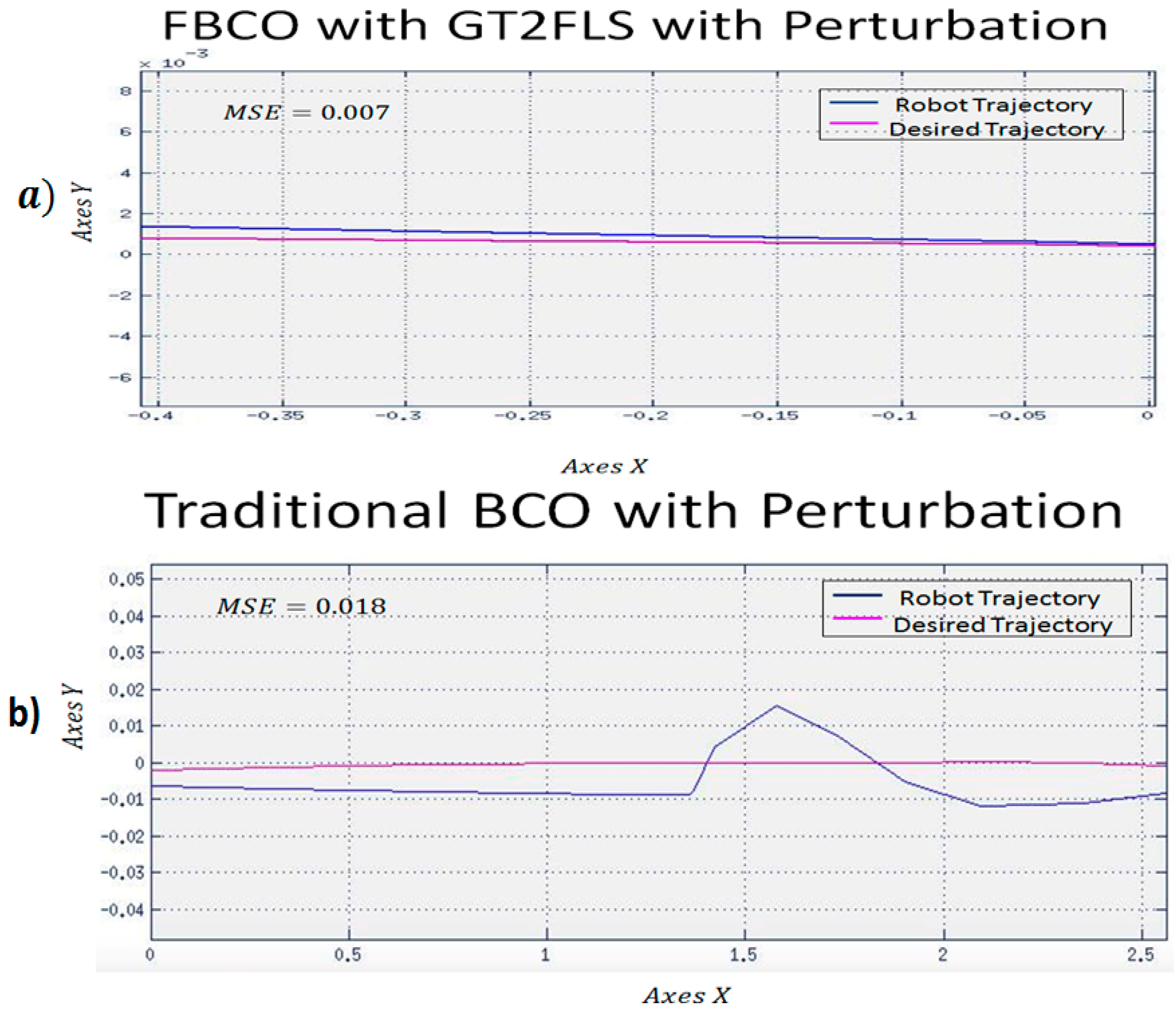
To observe the efficiency of proposed method, a different trajectory is shown in
Figure 24, where we have shown the best experiment with FBCO with GT2FLS and the best experiment of the Traditional BCO used the perturbation pulse generator with value of 0.5 (see
Table 7).
With a linear trajectory, in
Figure 24 the proposed method (a) the pink line (robot trajectory) is closest to the yellow line (desired trajectory). This simulation is reflected with the MSE that the FBCO with GT2FLS found with a value of 0.007 compared to the Traditional BCO (
Figure 24b) that had the best MSE of 0.018 with perturbations in the model.
7. Discussion
Every problem that has been analyzed required the optimal parameters for an optimization algorithm. For this reason is necessary to realize several experiments to meet these parameters. In this work, we realized a study to determine how the alpha and beta values affect the performance of the BCO algorithm applied in the fuzzy controller, and to obtain whit this design of the fuzzy rules to the GT2FLS.
Based on the experiments in
Section 5, we analyzed the results; the Traditional BCO algorithm is a good technique for the optimization and design of the fuzzy controller, because the behavior of the trajectory in the autonomous mobile robot without applying perturbation in the model is good (see
Table 5), but when we increased the levels of noise, the stabilization in the model is better with the adjustment dynamic of parameters using GTL2FLS (see
Figure 23), this is because the uncertainty is better handle and the perturbations the level of noise is minimized with GT2FLS.
When the size of the FOU in the Interval Type-2 FLS is increasing (see
Table 8) the perturbation is better analyzed, the best MSE found was of 0.004 compared to the Traditional BCO that was of 0.008. It is important to mention that when the size of Volume in GT2FLS is increasing (see
Table 8) to allow evaluate more secondary membership functions and the standard deviation is smaller with a value of 3.32 with perturbation in the model compared to 7.27 with Traditional BCO; this determines that all the results found by GT2FLS are similar.
Future work in this research consists in applying this technique to find the optimal values in the alpha and beta parameters for the optimization the Interval Type-2 Fuzzy Logic Controller and Benchmark Functions with the Fuzzy BCO algorithm, and thus able to observe that the optimal parameters found with this method are adapted to any optimization problem.
8. Conclusions
In this paper, we conclude that the BCO algorithm is a good optimization technique for design and stabilization of fuzzy controllers. The process of dynamically adjusting parameters of an optimization method (in this case the Bee Colony Optimization algorithm), can improve the quality of results and increasing the diversity of solutions to a problem. Three fuzzy systems were designed for the adjustment the parameters for BCO algorithm, T1FLS, IT2FLS and GT2FLS. These proposed methods show the quality of the results better that the Traditional BCO when the design of the parameters in a fuzzy logic system for an autonomous mobile robot in simulation allow the stabilization of the trayectory and minimization of the error efficiently.
Experiments were performed with the proposed method to find the optimal alpha and beta values in the parameters of BCO algorithm, and a comparison was made between the method of traditional bee colony optimization and the proposed methods, i.e., with the three fuzzy systems for parameters adjustment.
The BCO algorithm was implemented to find the optimal distribution of parameters in the design of the fuzzy controller, especially in controlling the trajectory in an autonomous mobile robot, thus being able to demonstrate the efficiency of the Fuzzy BCO algorithm as a technique to improve the performance in fuzzy controllers. By comparing the proposed methods and the Traditional BCO algorithm, in the design of fuzzy logic systems applied to fuzzy control it was found that based on the experiments, it was possible to develop a method for dynamically adjusting the alpha and beta parameters of the BCO through the three fuzzy logic systems. And in this way improving the results compared with the simple BCO method.
The performance of each fuzzy system, used in this research was observed in the results, when IT2FLS is increased the FOU size and when GT2FLS is increasing the volume size.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}