
Drift Reduction in Pedestrian Navigation System by Exploiting Motion Constraints and Magnetic Field

Abstract
:1. Introduction
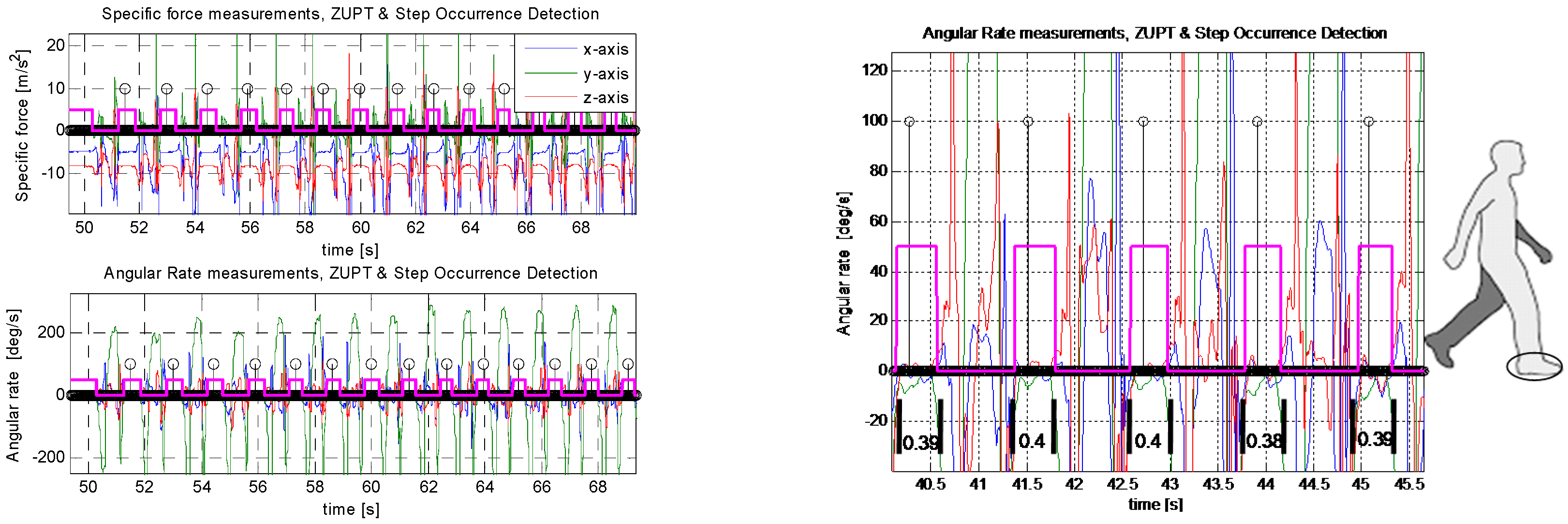
- Stance phase i.e., conventionally used Zero-velocity update (ZUPT)
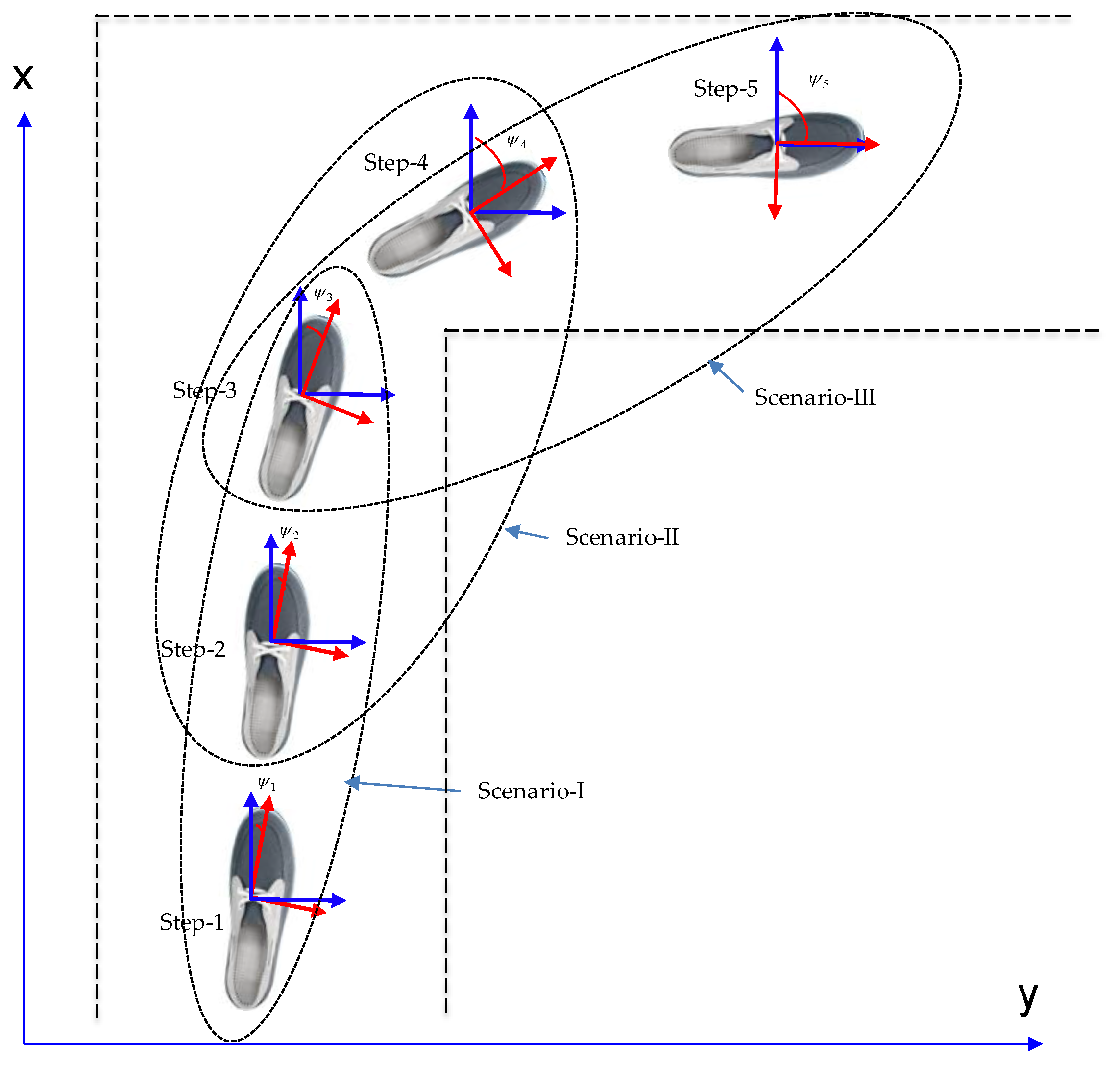
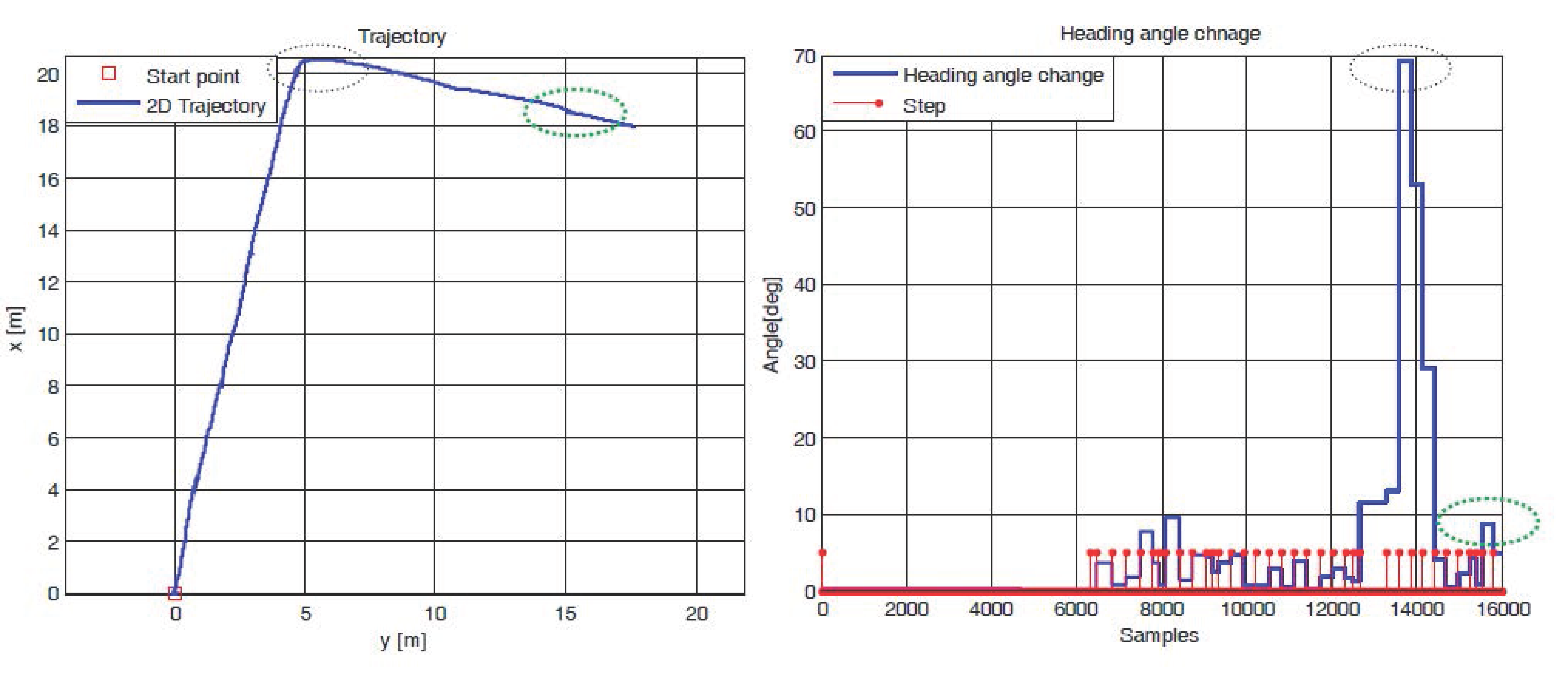
- Walking along straight paths i.e., Straight Trajectory Heading update (STH)
- Standing still for a long time i.e., Position and Attitude Lock (PA-Lock).
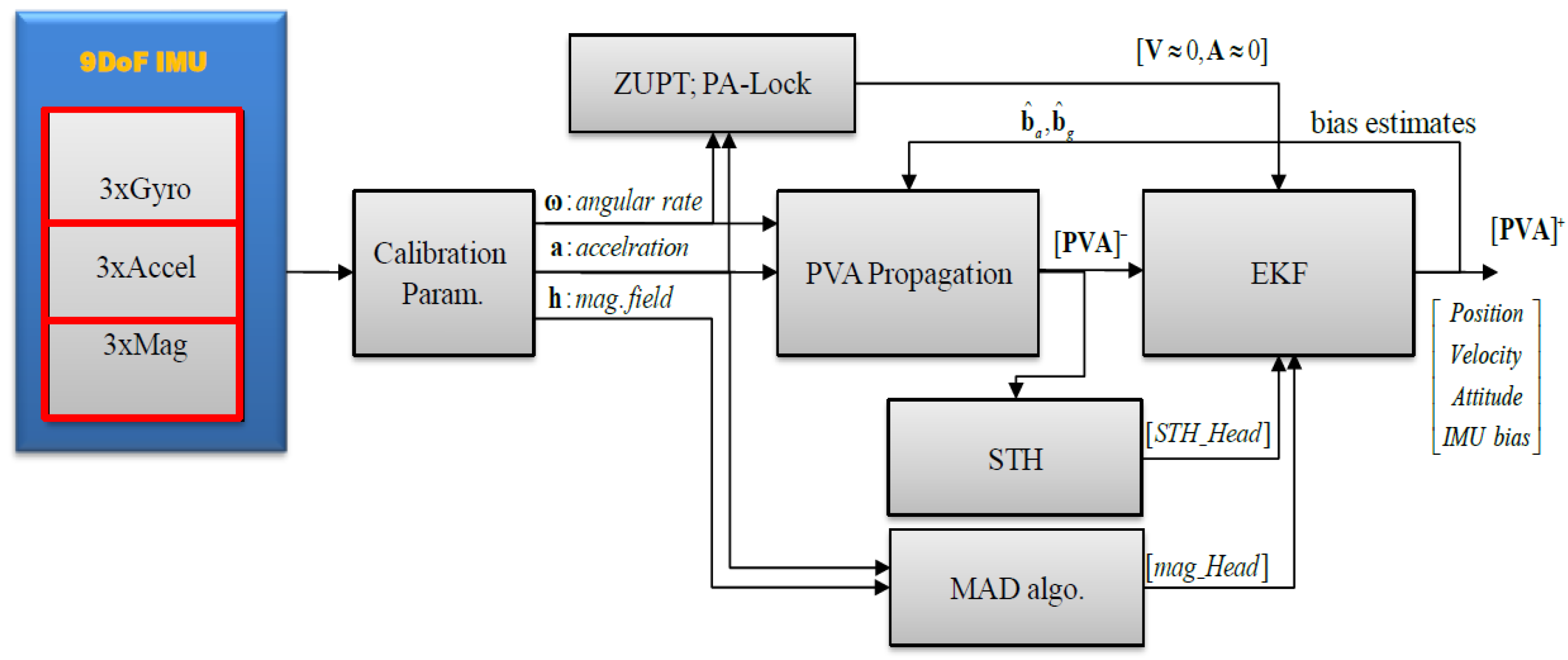
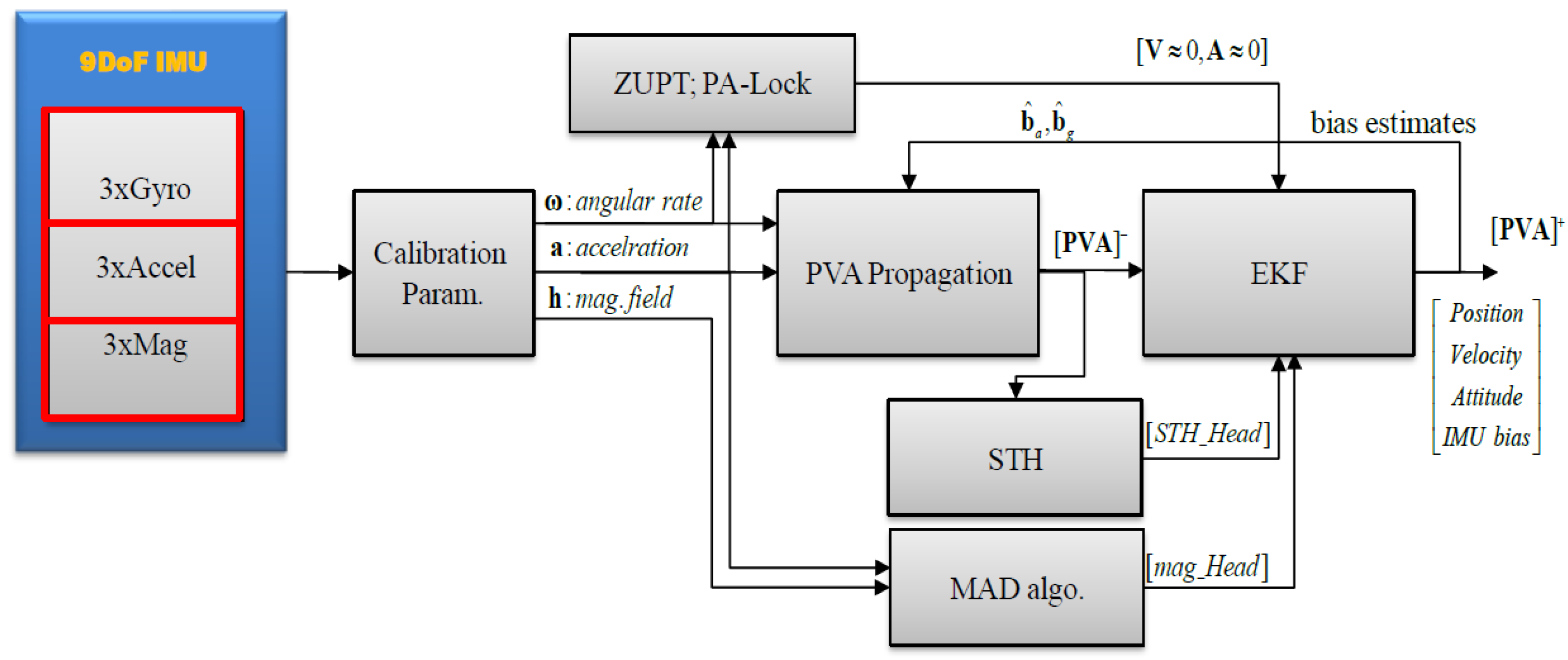
2. Foot-Mounted Inertial Navigation System: Designing PNS
2.1. Foot-Mounted INS Mechanization
2.2. Foot-Mounted INS Error Model
3. INS Aided with Motion Constraints (“Virtual Sensors”)
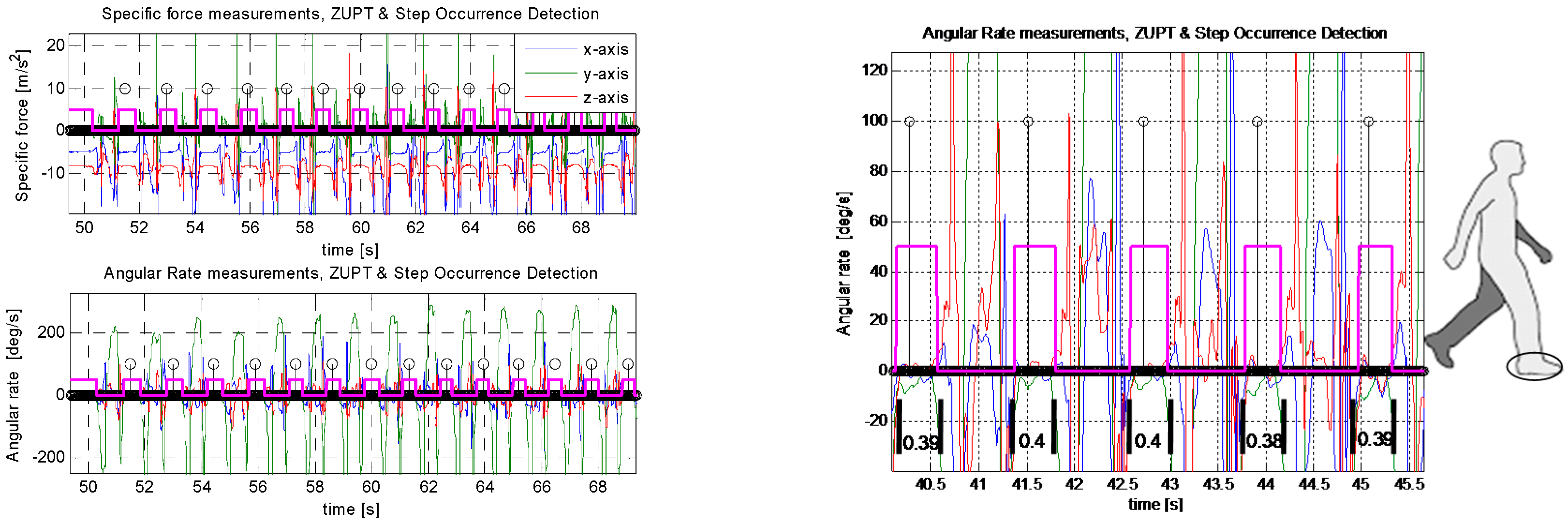
3.1. Zero-Velocity Update (ZUPT)
3.2. Zero Velocity Detection Algorithm
3.3. Why Is a Zero Velocity Update Important?
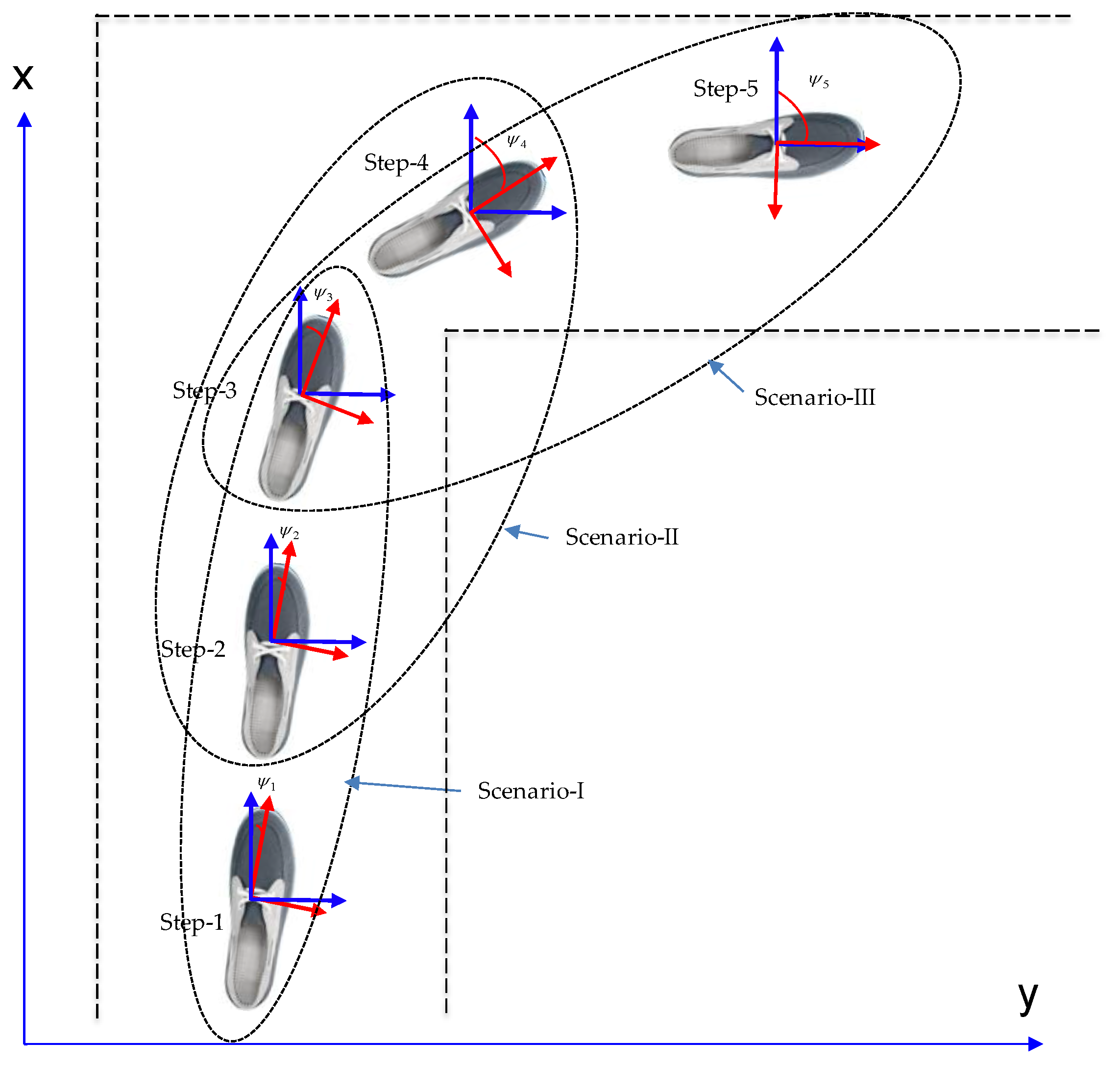
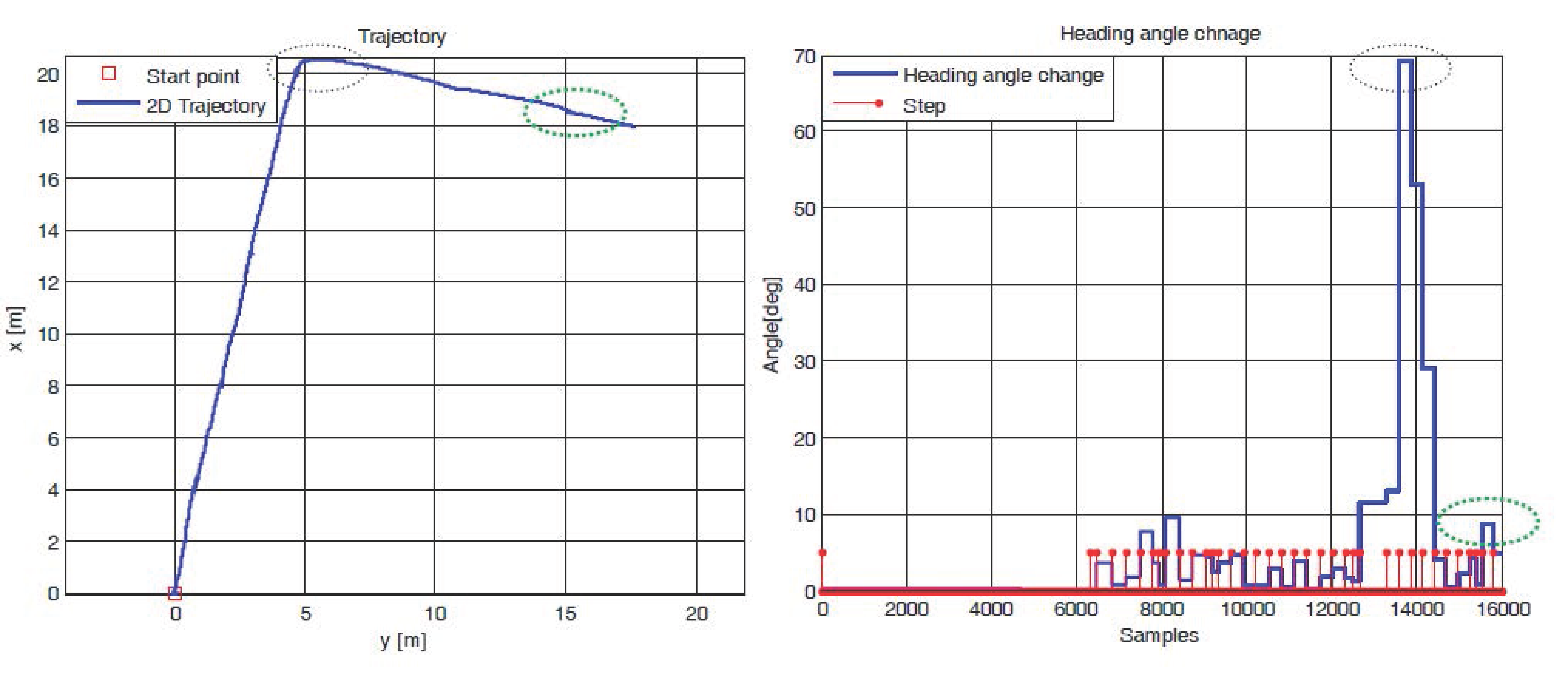
3.4. Walking along Straight Paths: Straight Trajectory Heading (STH) Update
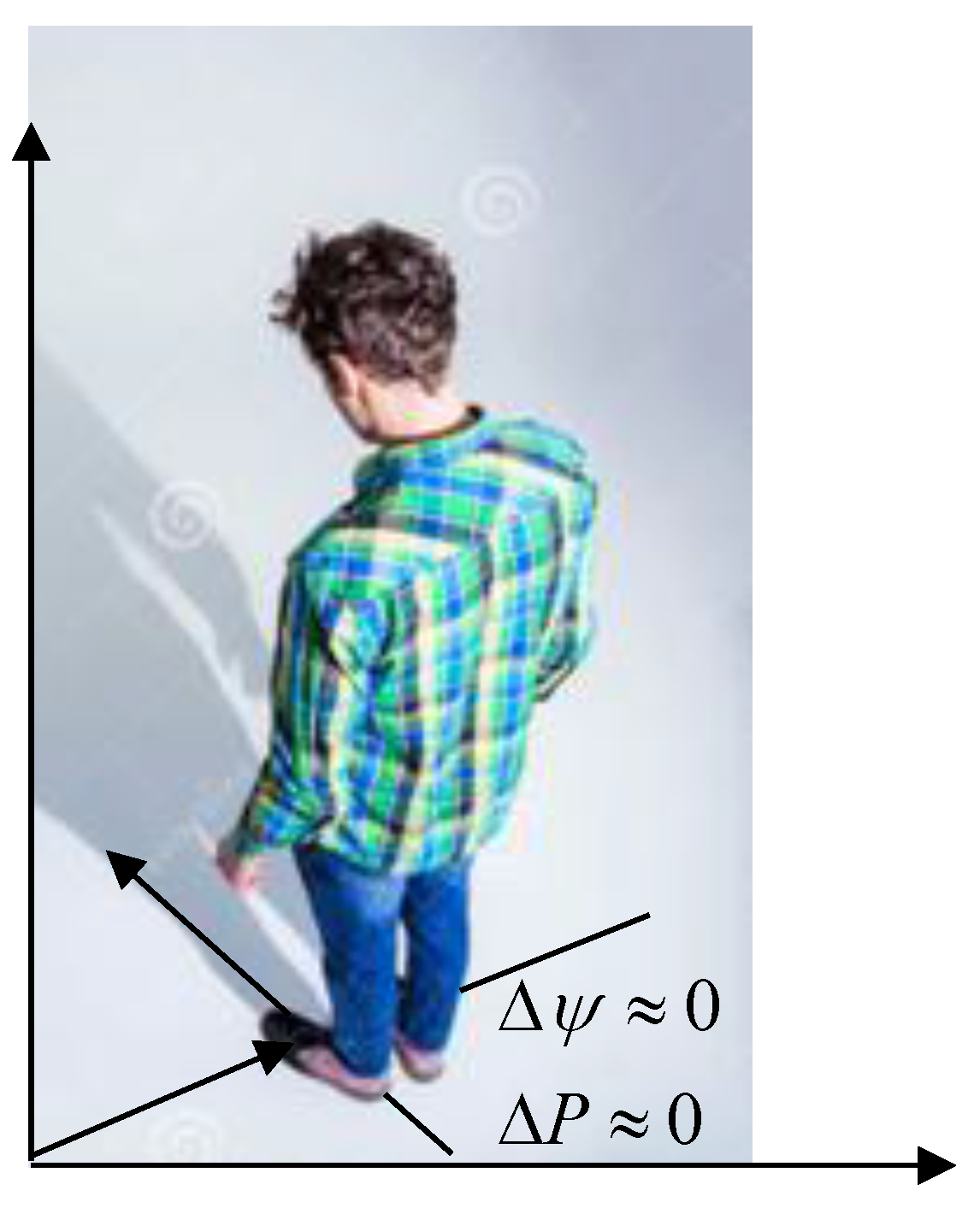
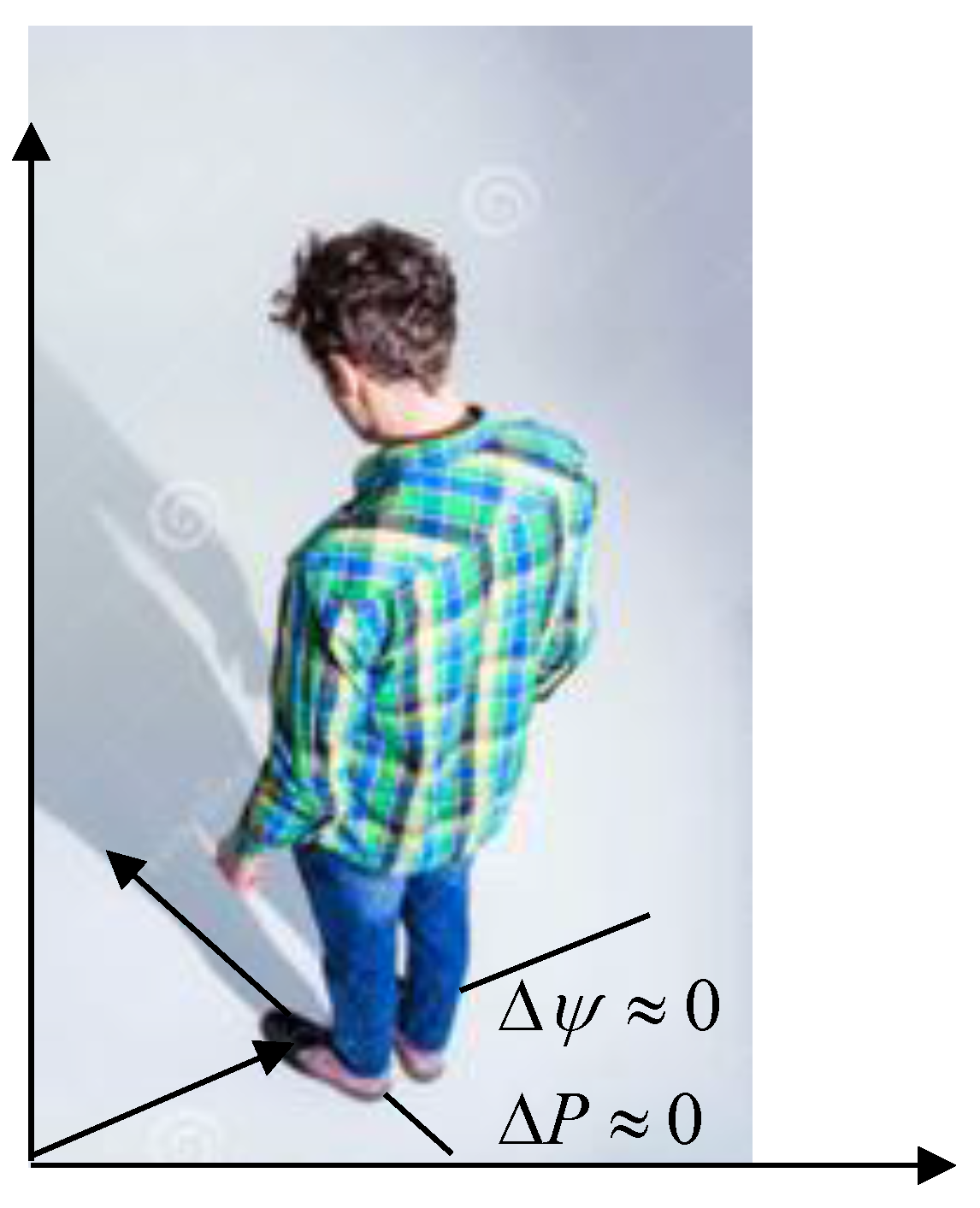
3.5. Standing Still for a Long Time: PA Locking Mechanism
4. Absolute Heading Estimation Using Magnetometer
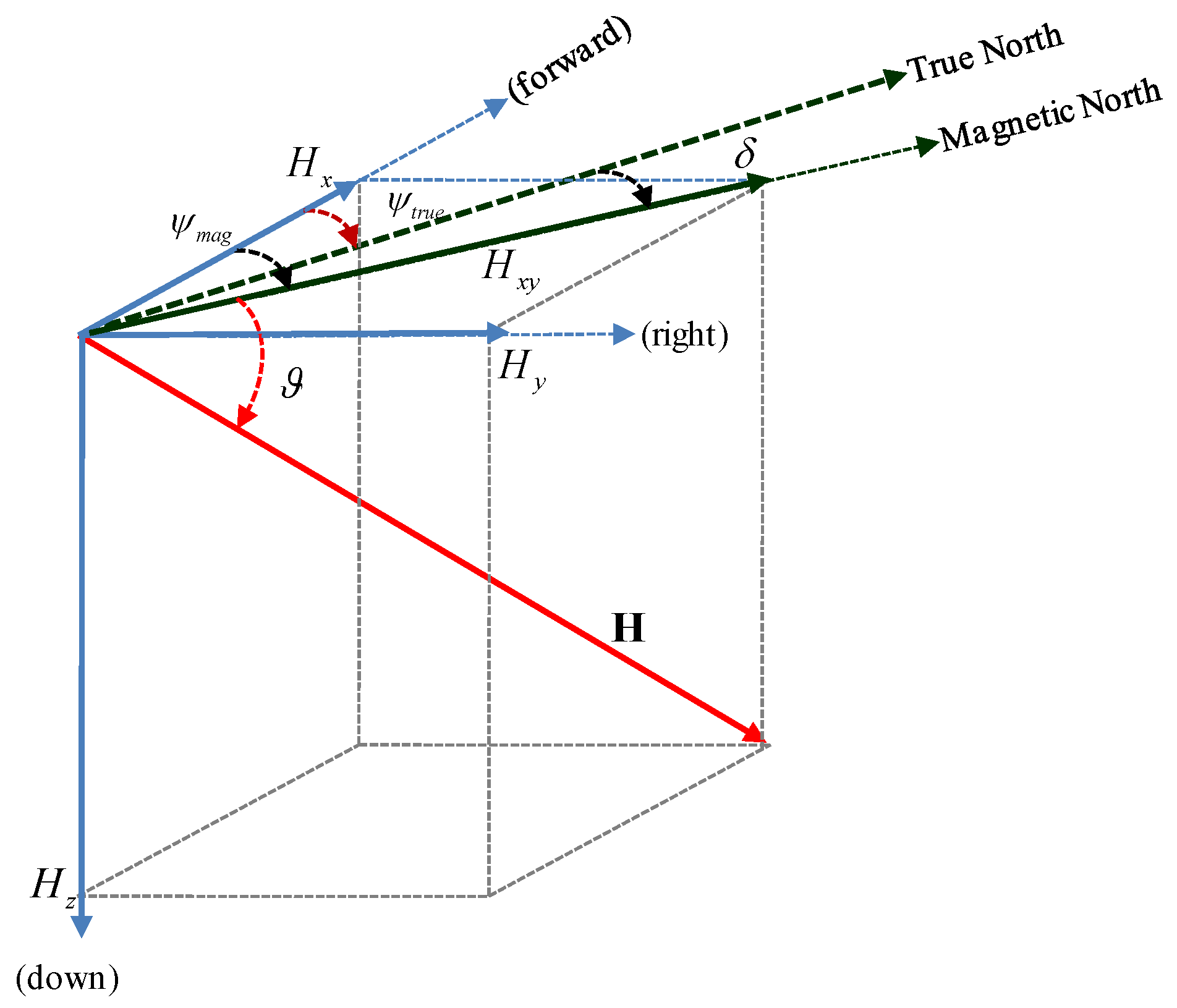
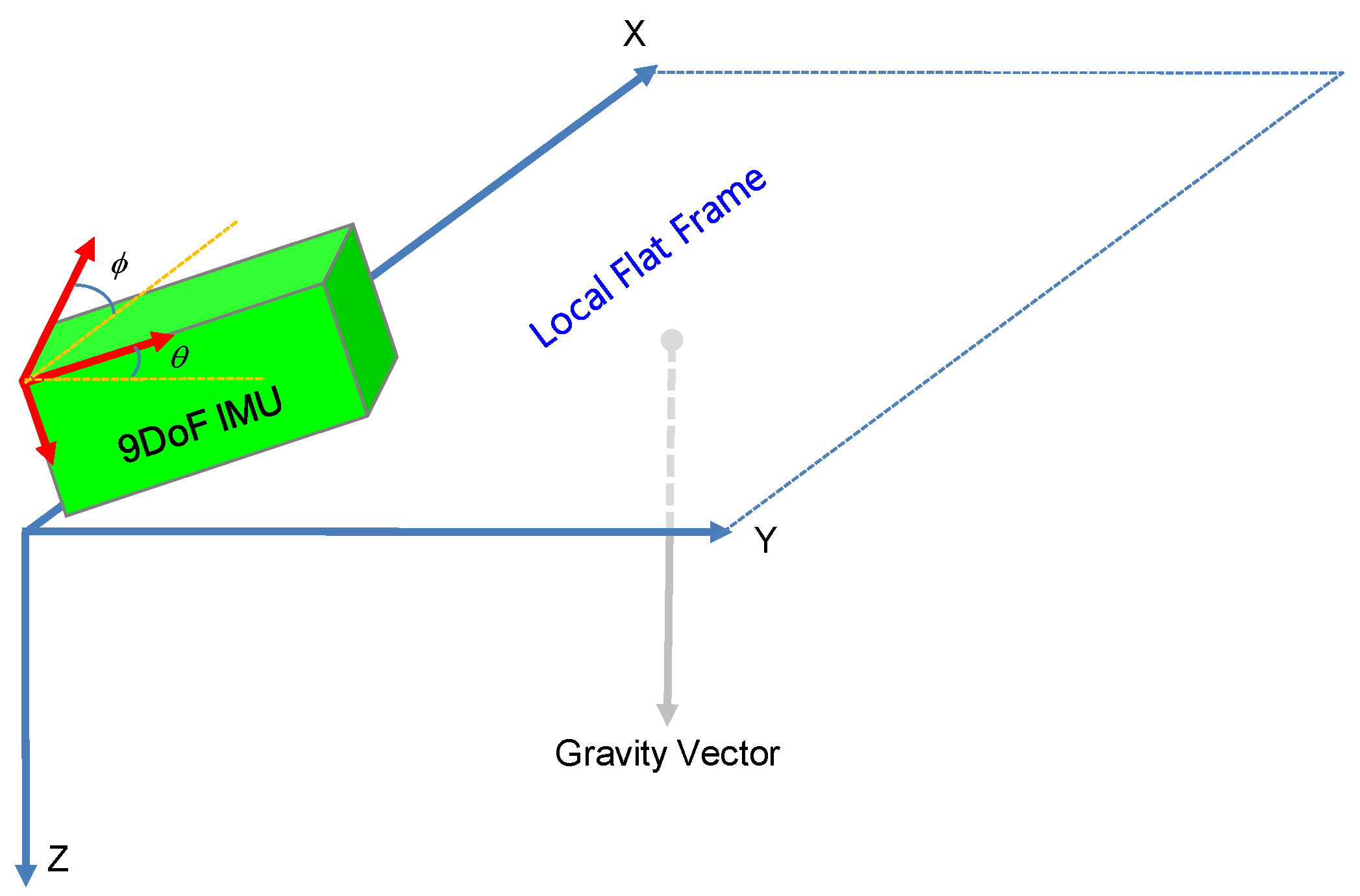
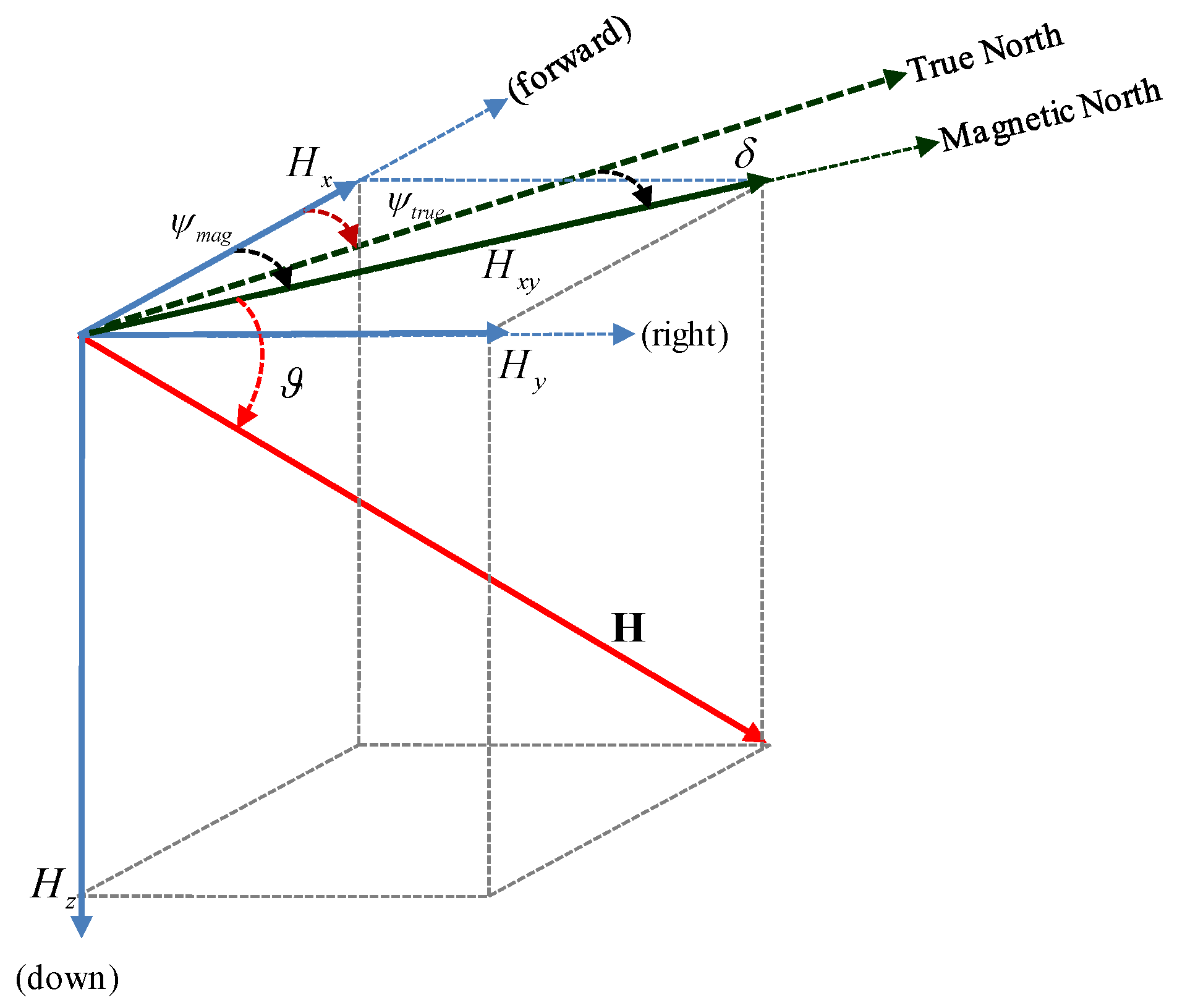
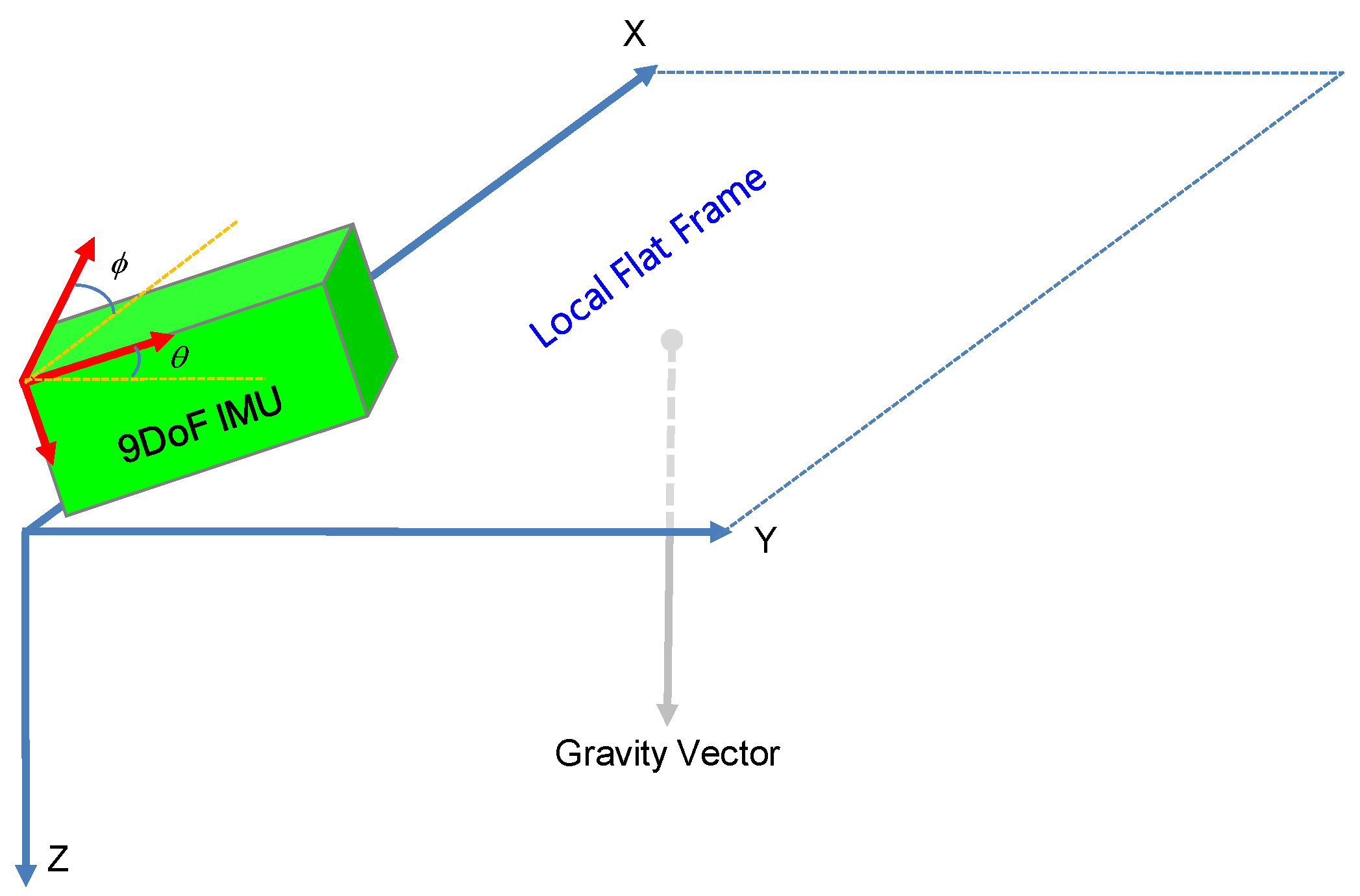
4.1. Magnetometer Used as Digital Compass
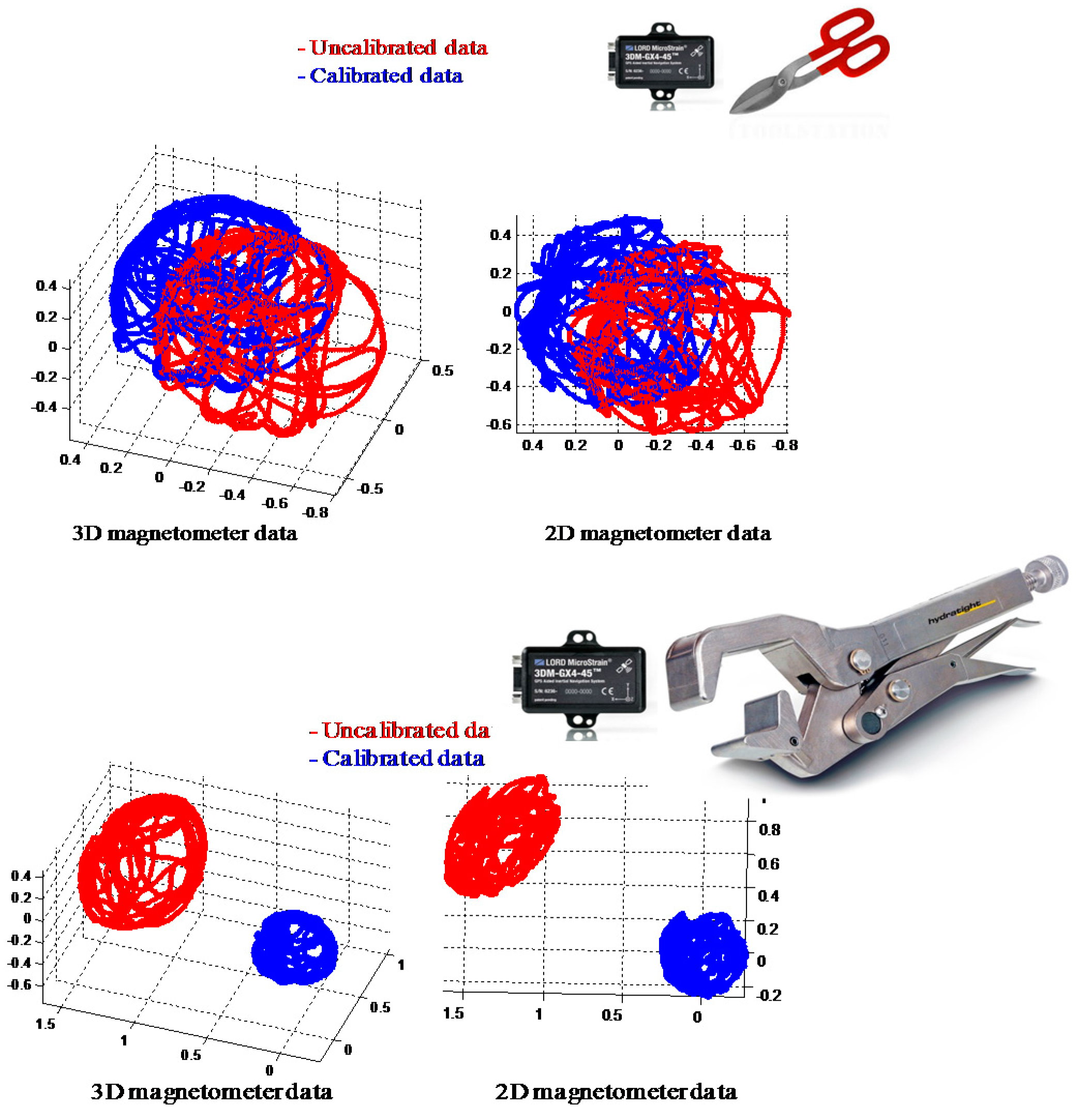
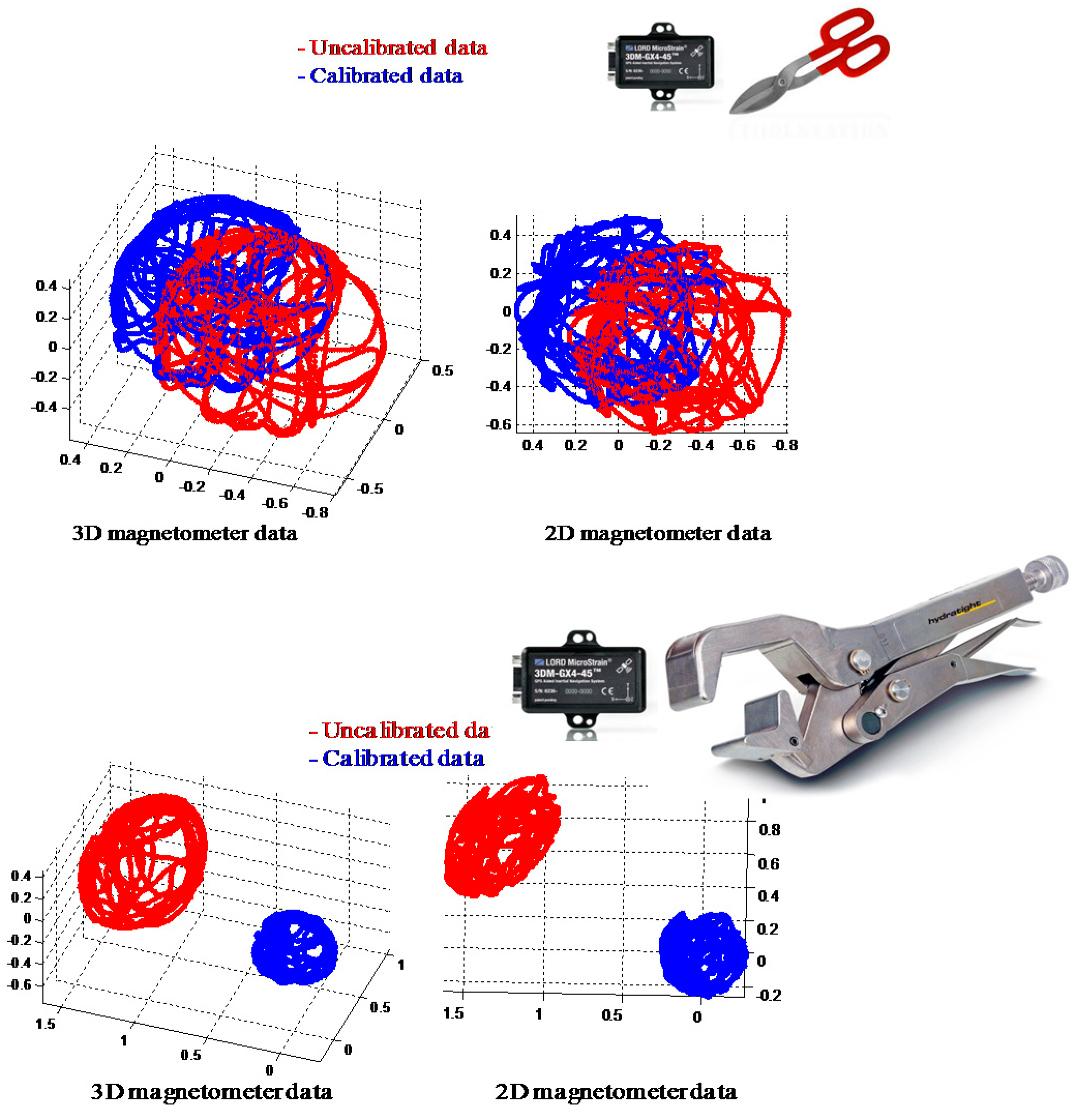
4.2. Transient Magnetic Anomaly Detection (MAD) and Compensation Algorithm
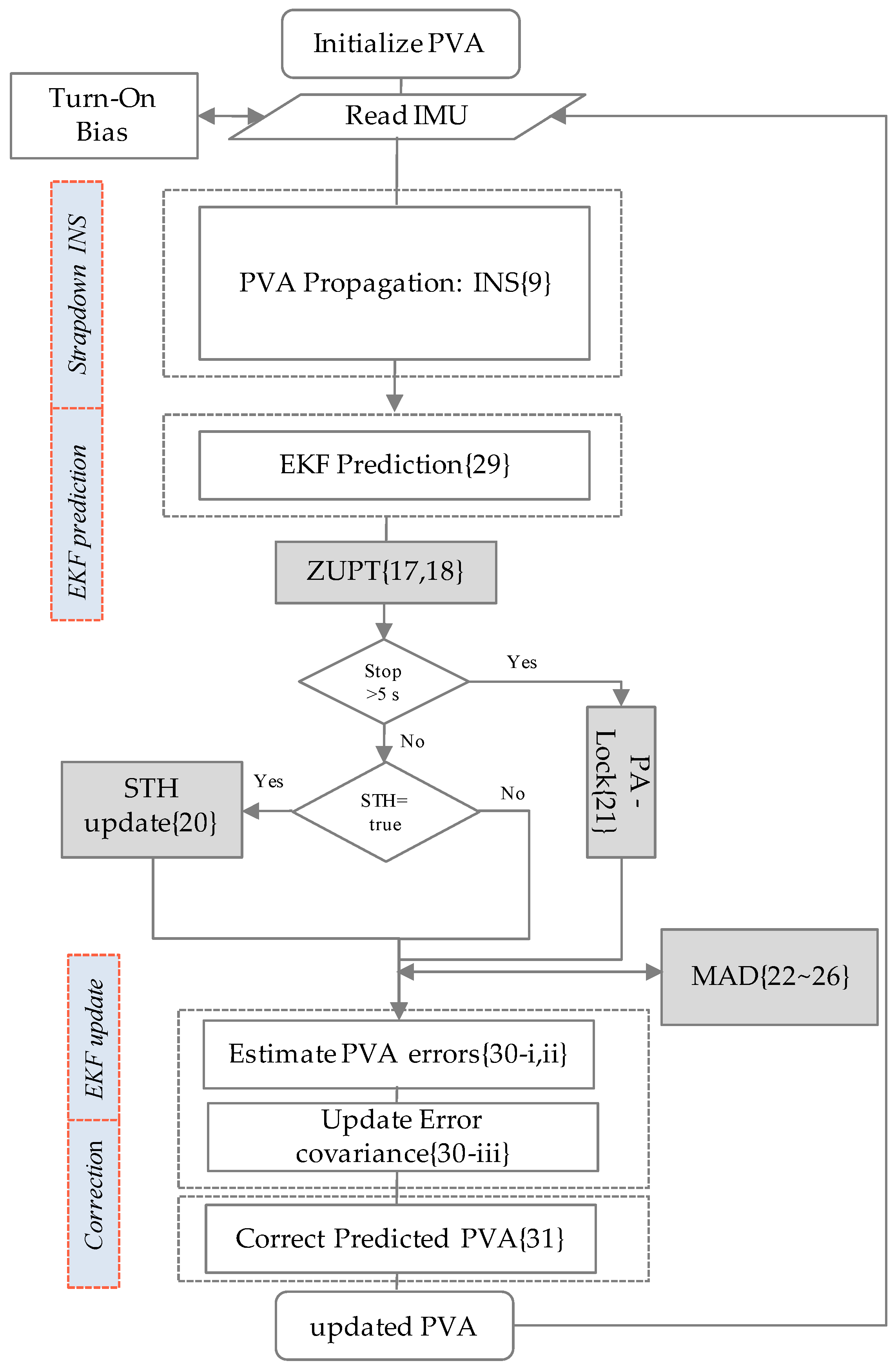
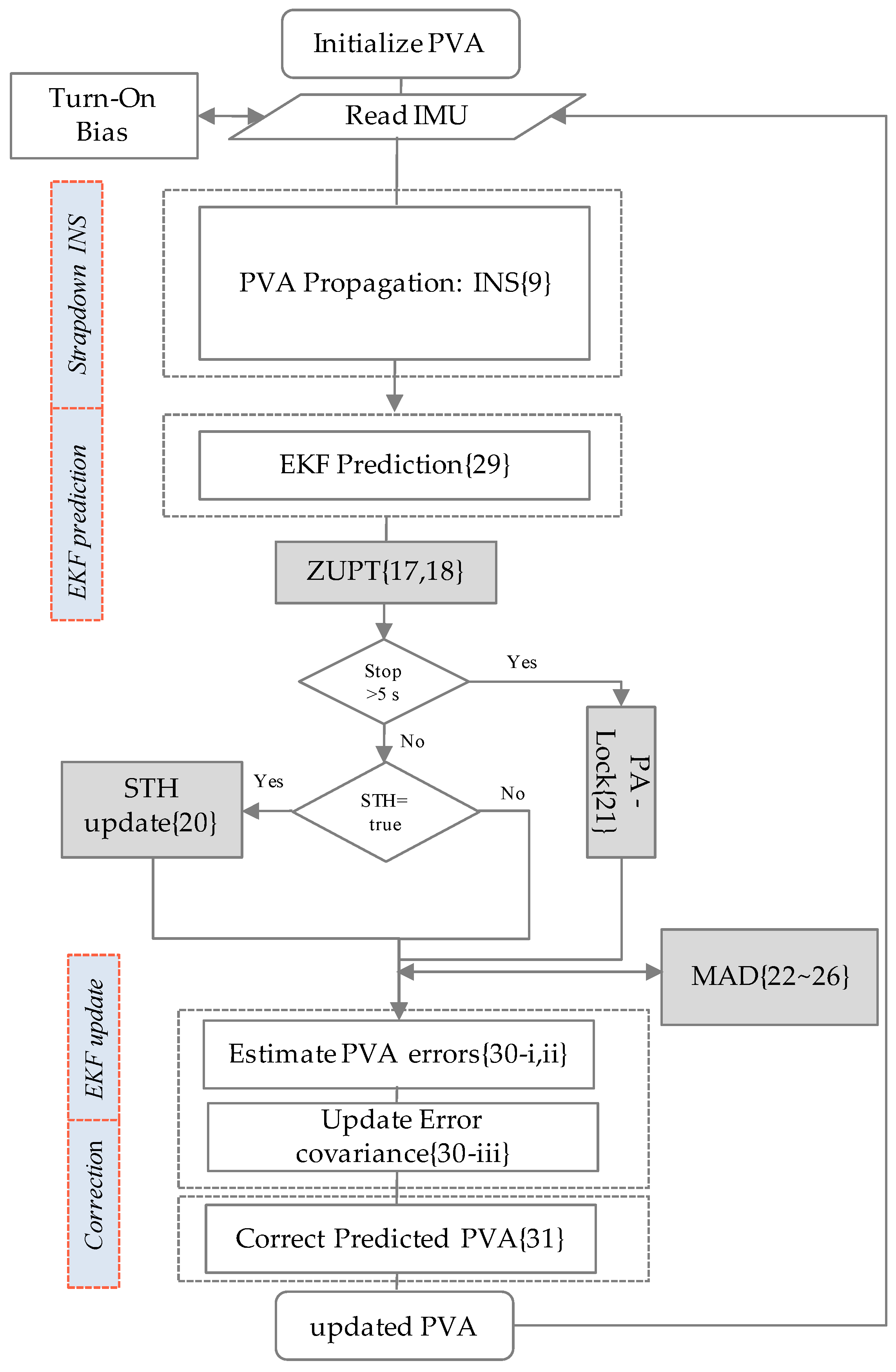
5. EKF Algorithm for Foot-Mounted PNS
- (i)
- Initialize the filter as follows:For k = 1, 2, …., N, perform the following:
- (ii)
- Obtain discrete state transition matrices:
- (iii)
- Perform the propagation step:
- (iv)
- Perform the measurement update step if:
- -
- ZUPT, PA-Lock, STH condition are true.
- -
- MAD condition is true.
- (v)
- Feedback error correction of PVA:
6. Experimental Results and Discussion
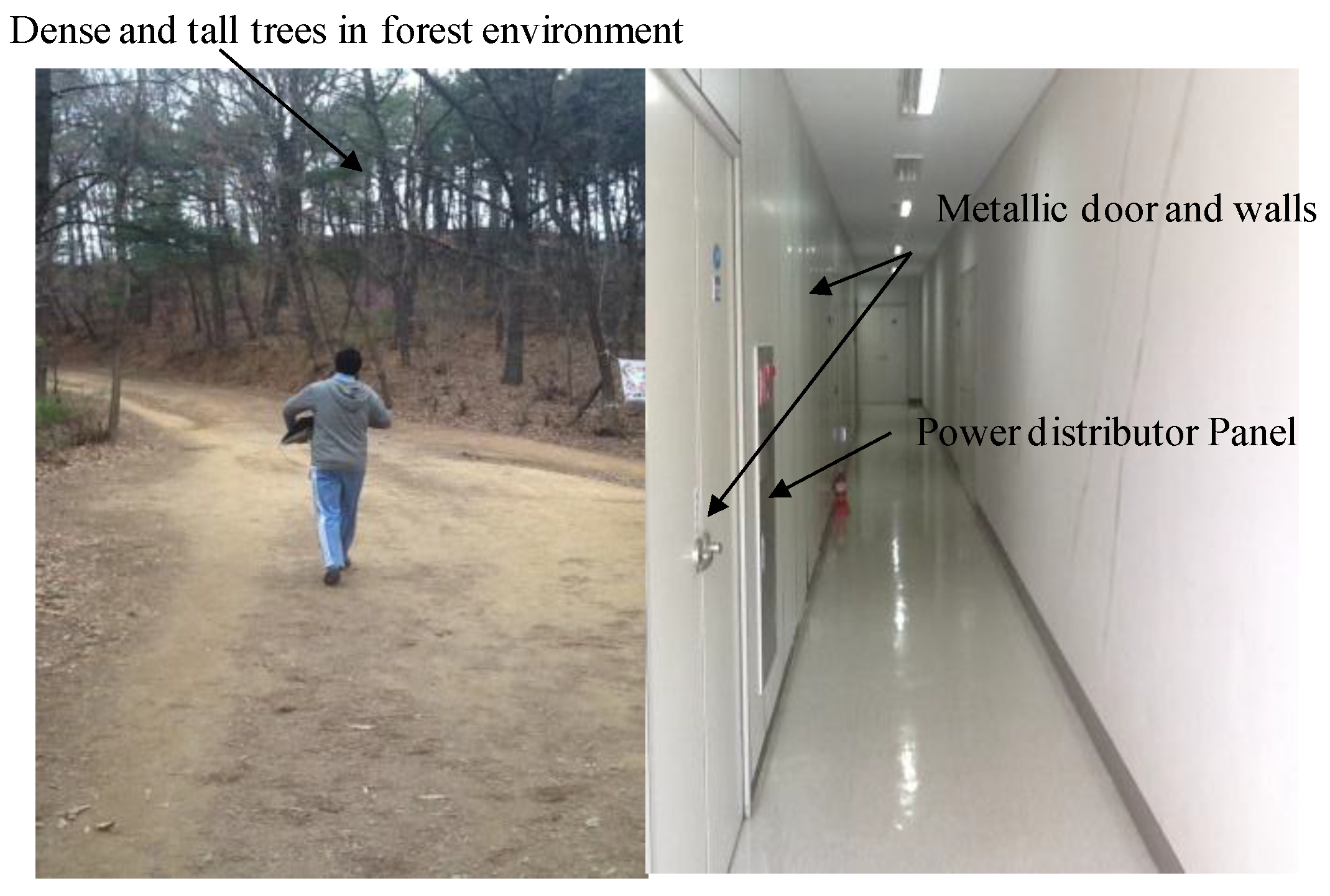
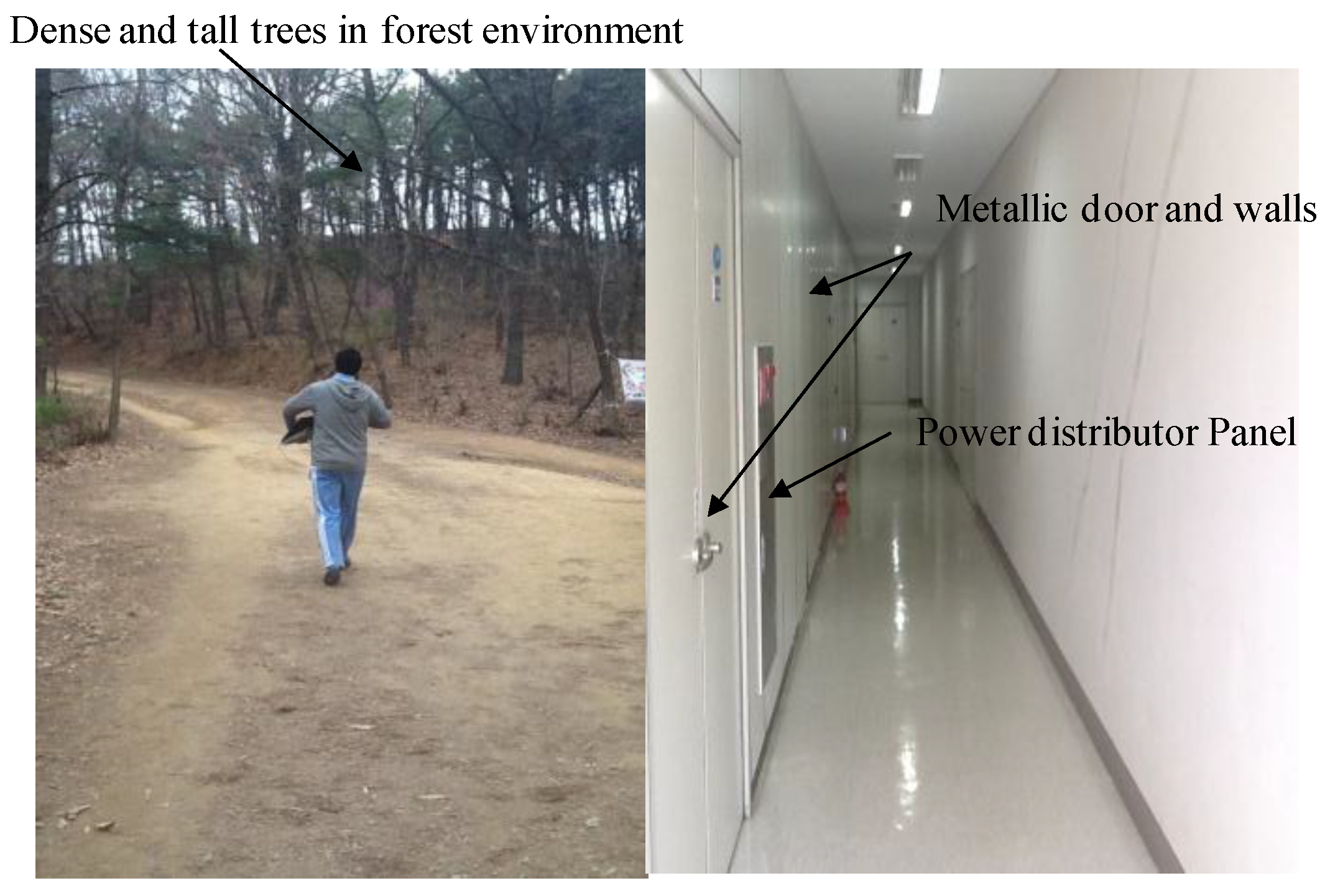
6.1. Test Environments
6.2. Experimental Setup and Evaluation Method
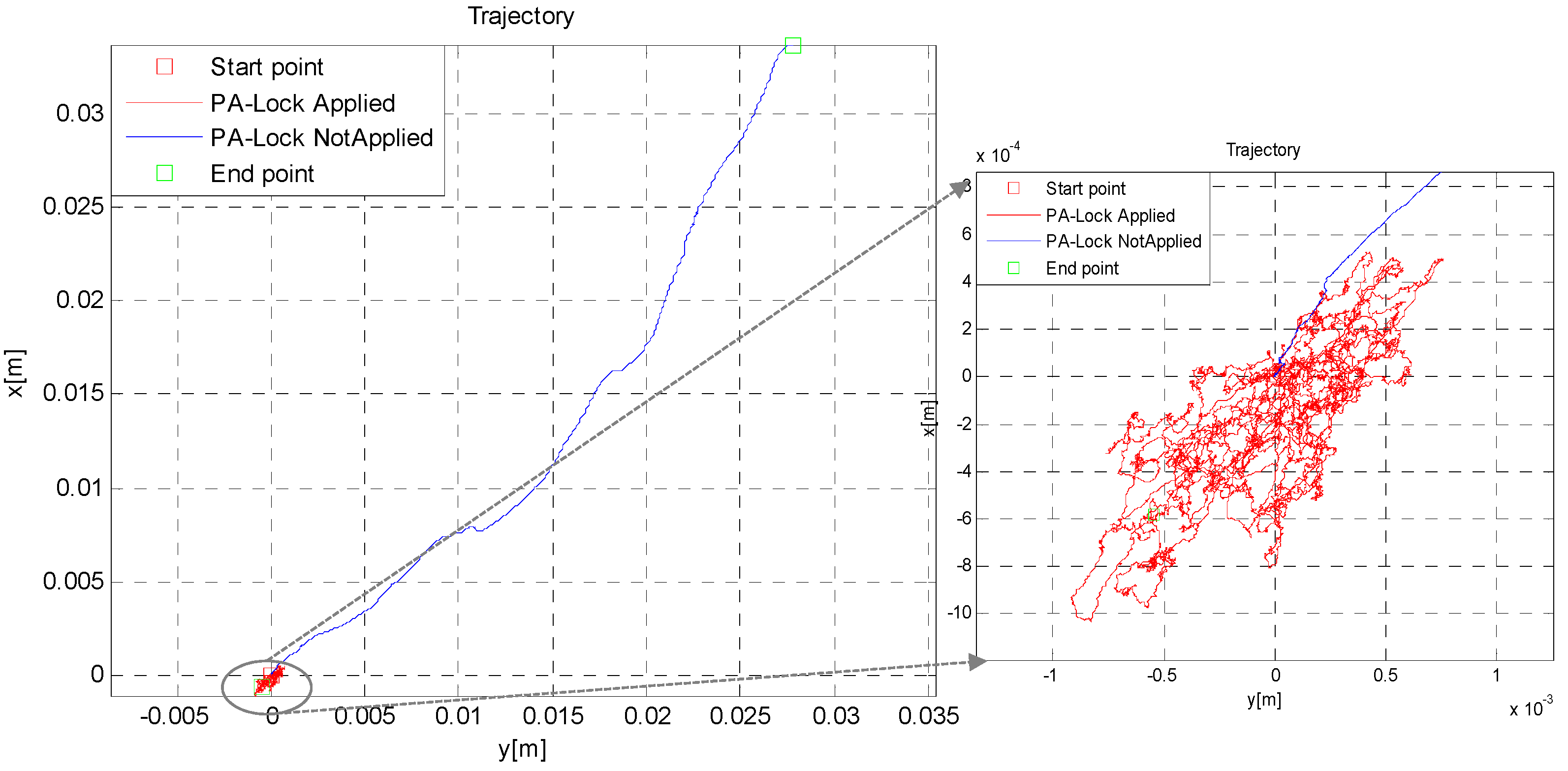
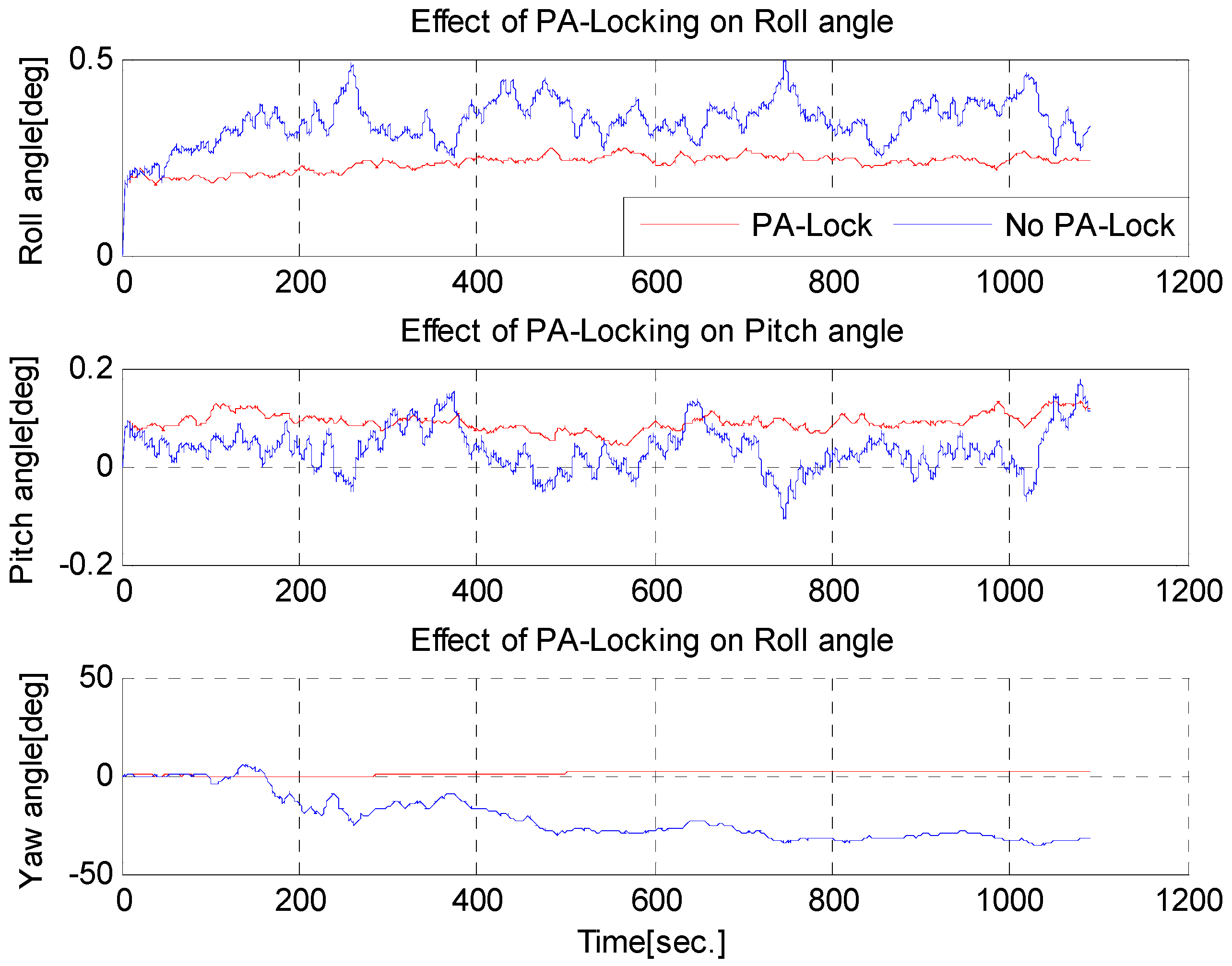
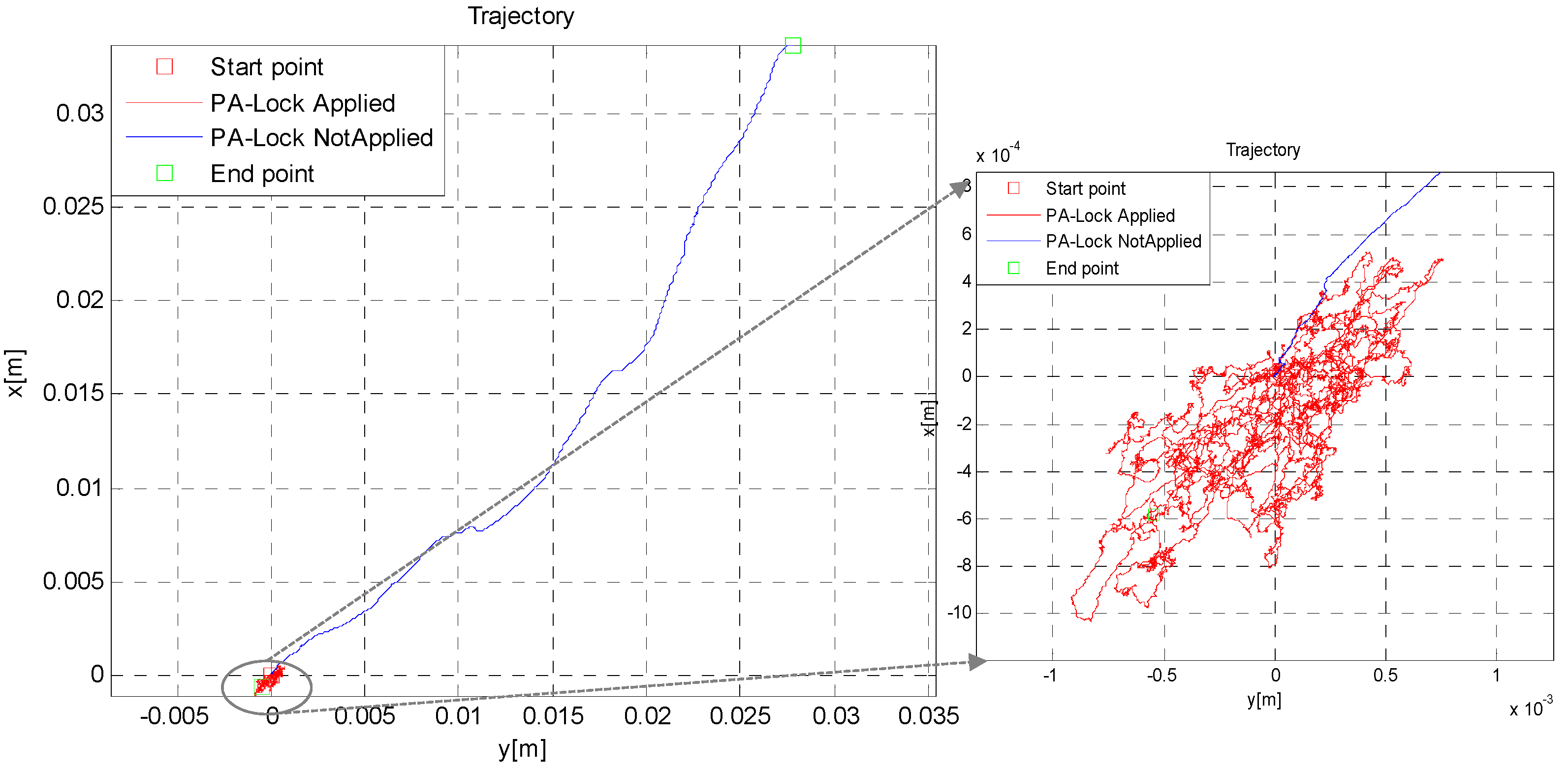
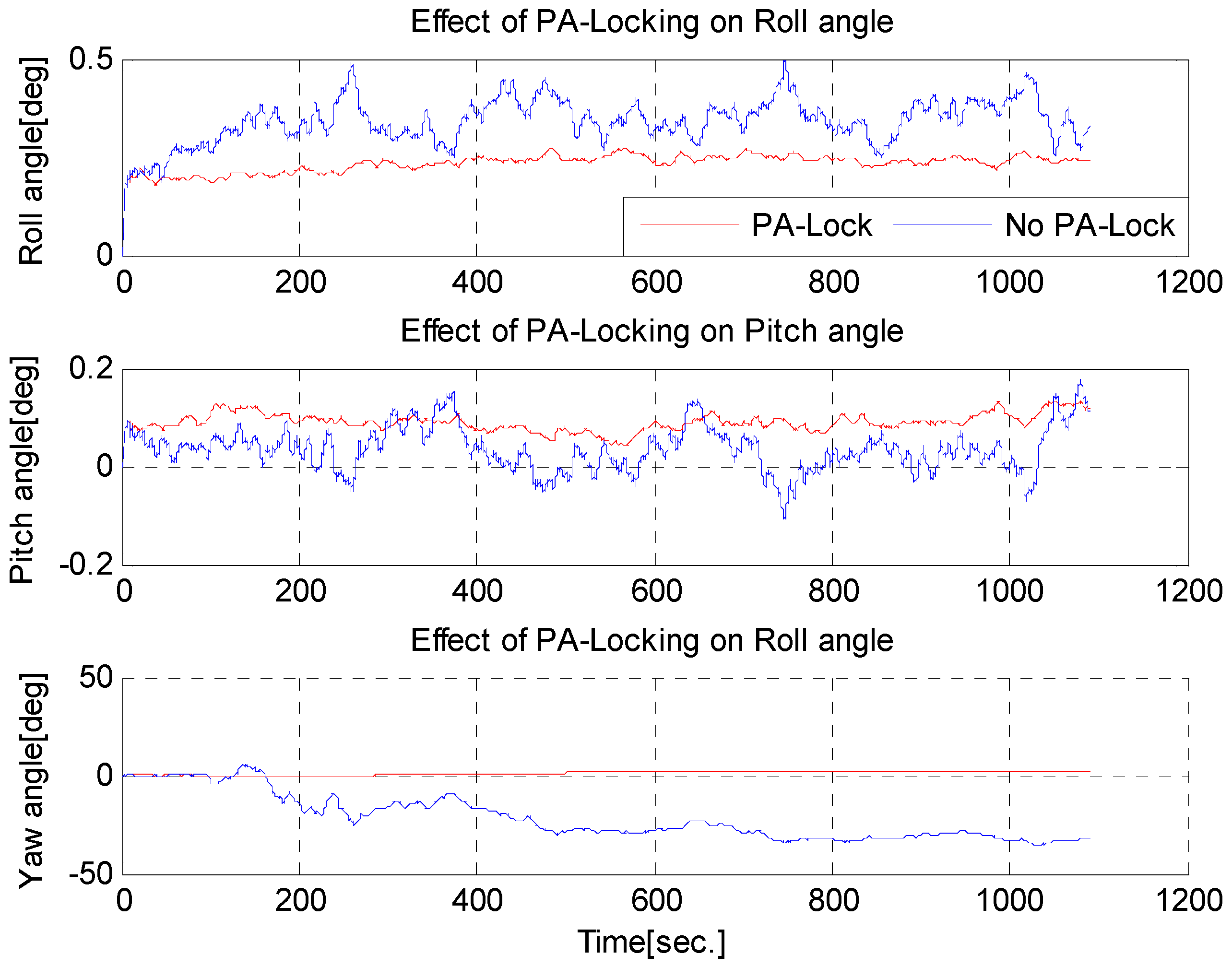
6.3. Static Test to Check PA-Lock Effectiveness
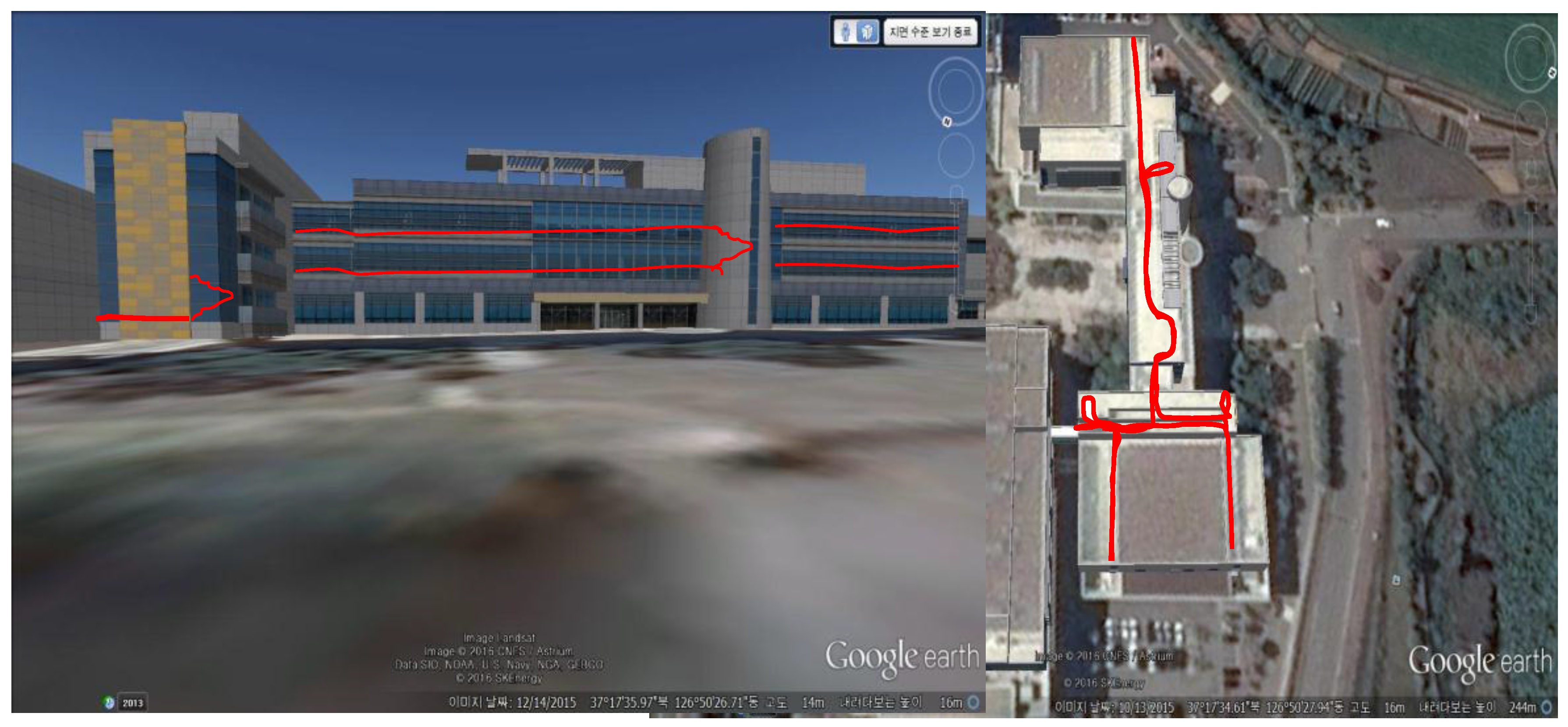
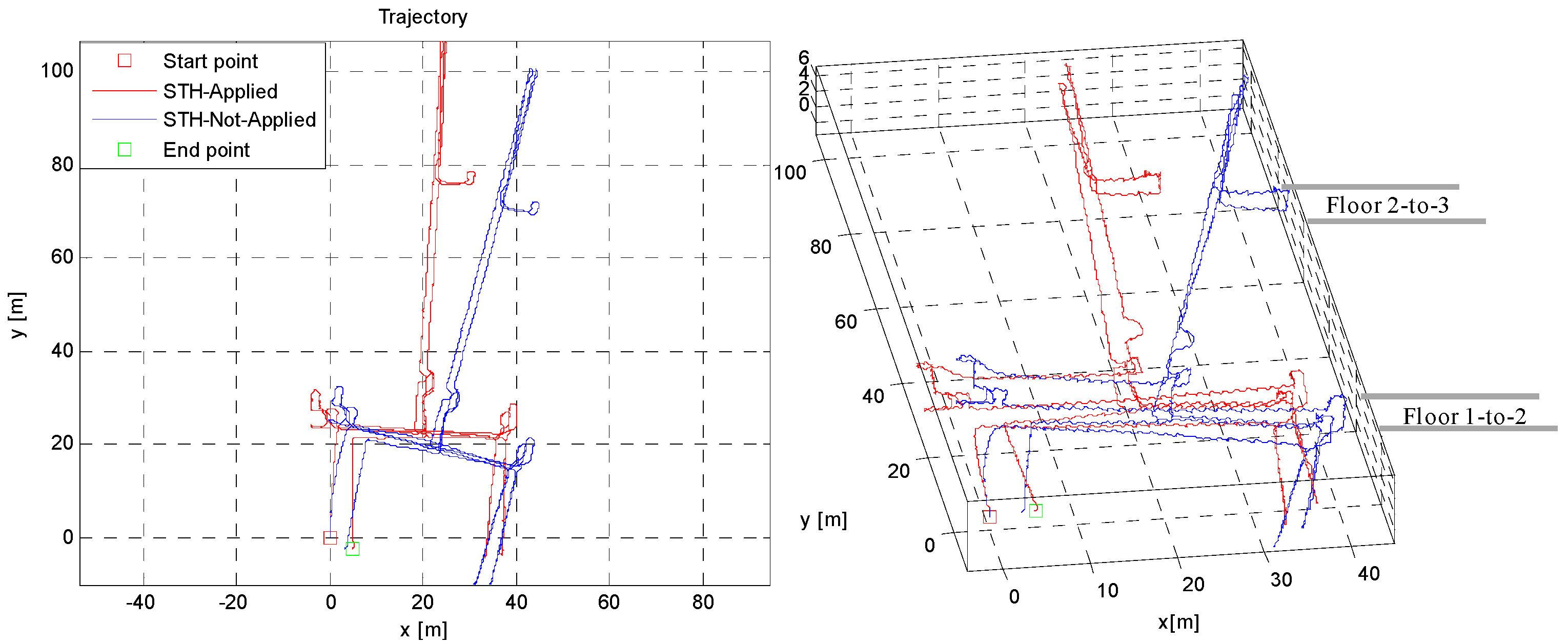
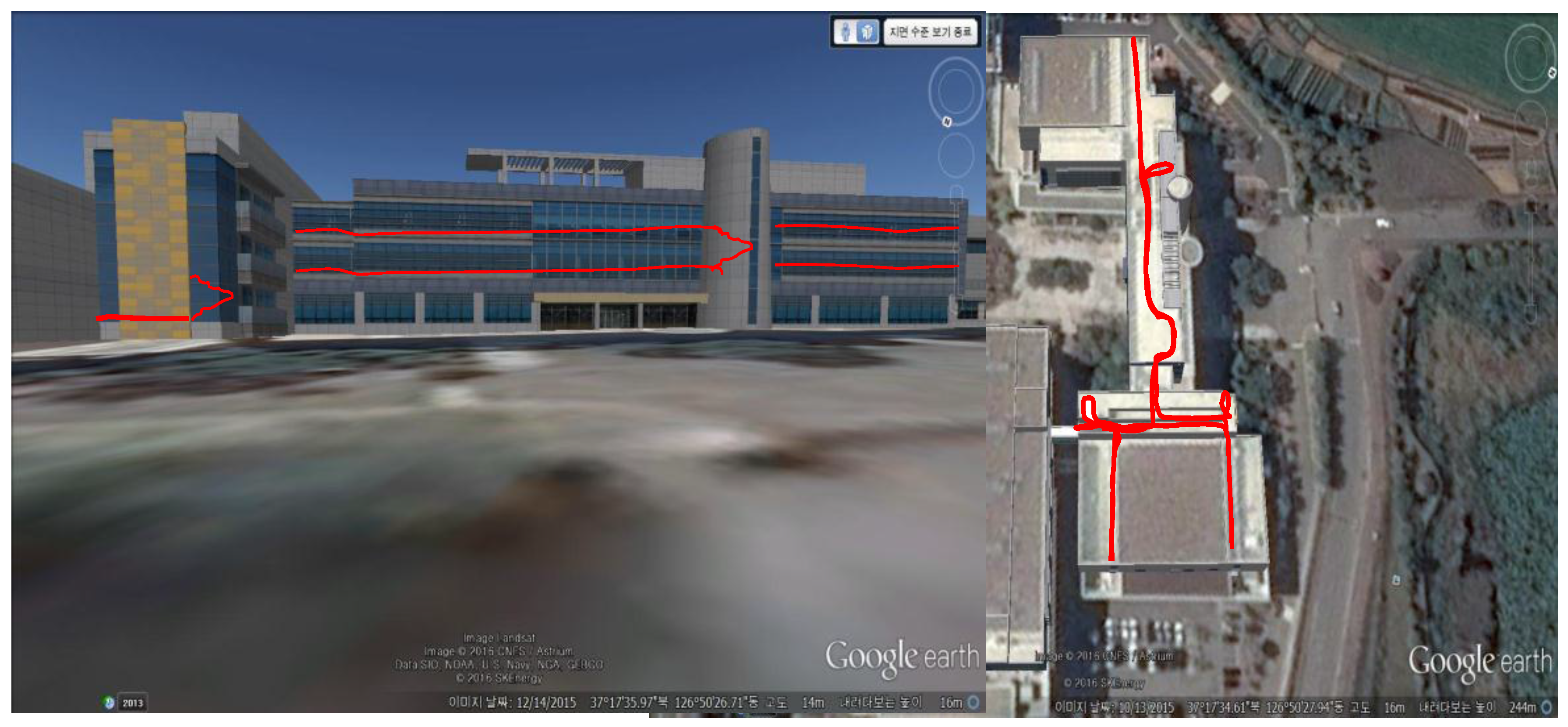
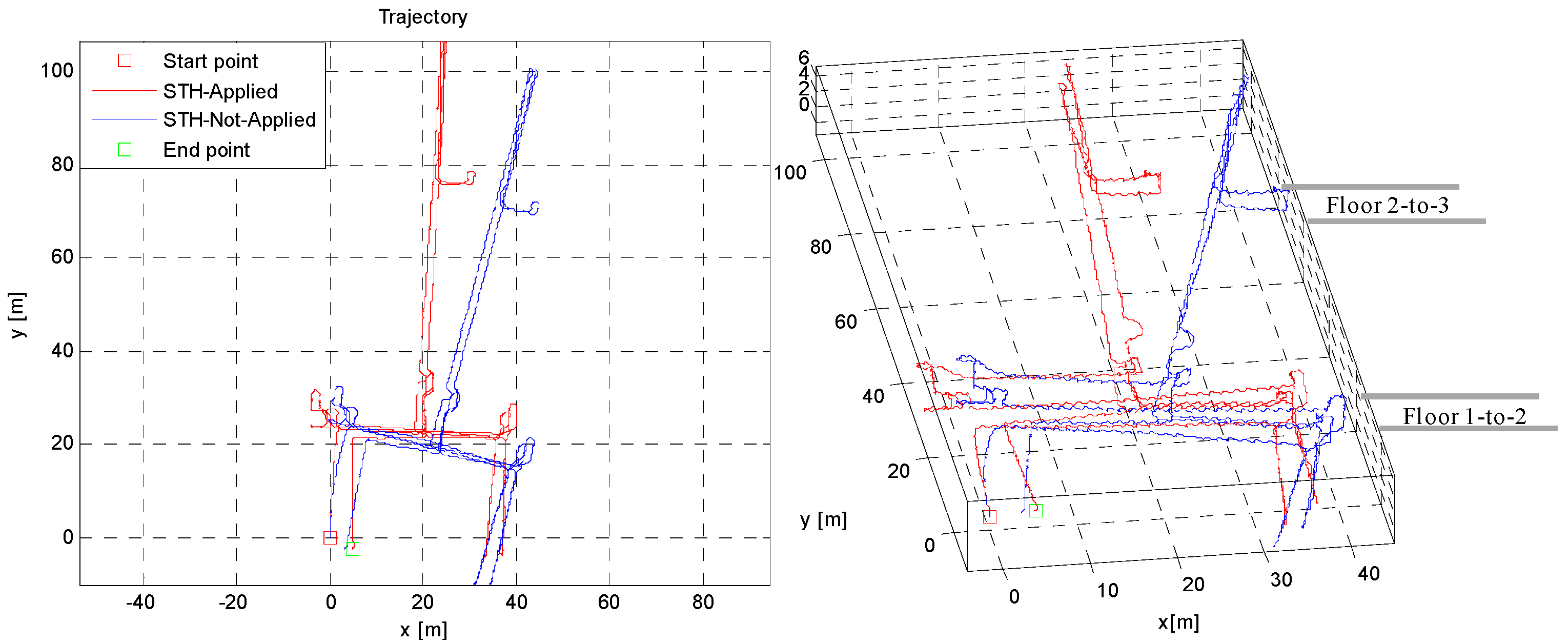
6.4. Indoor Environment Tests
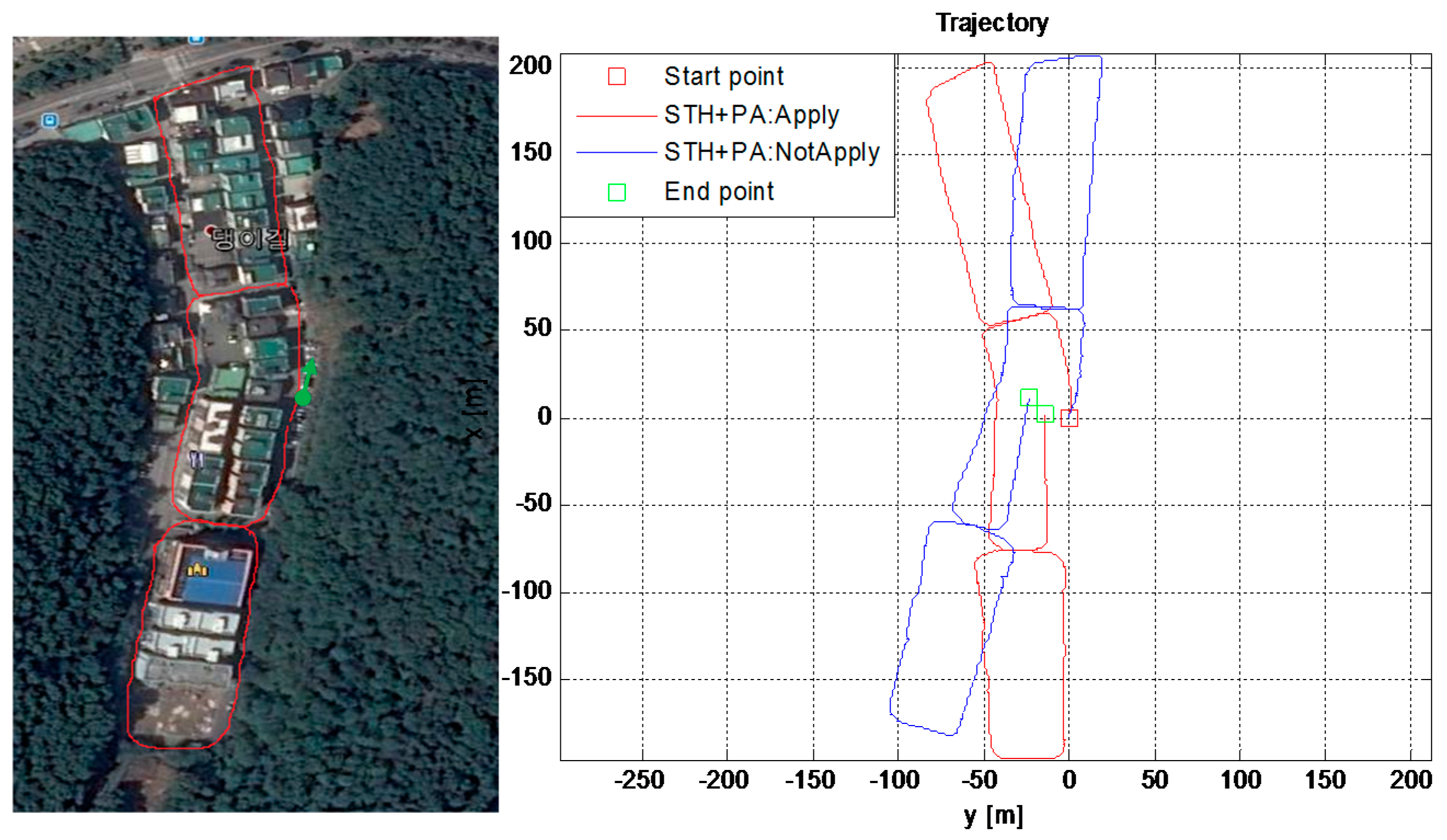
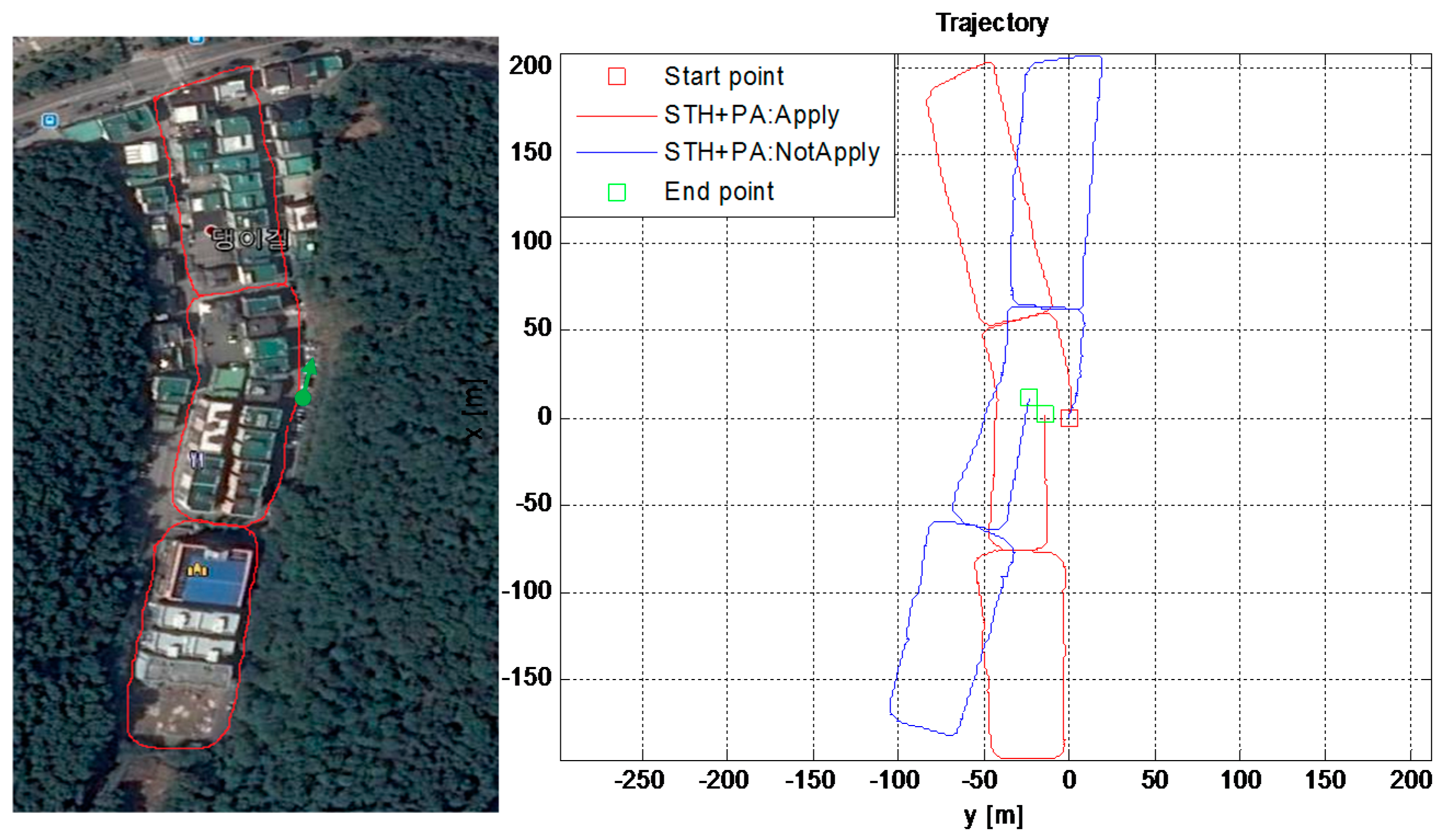
6.5. Outdoor Tests: Urban Canyon Environment Test
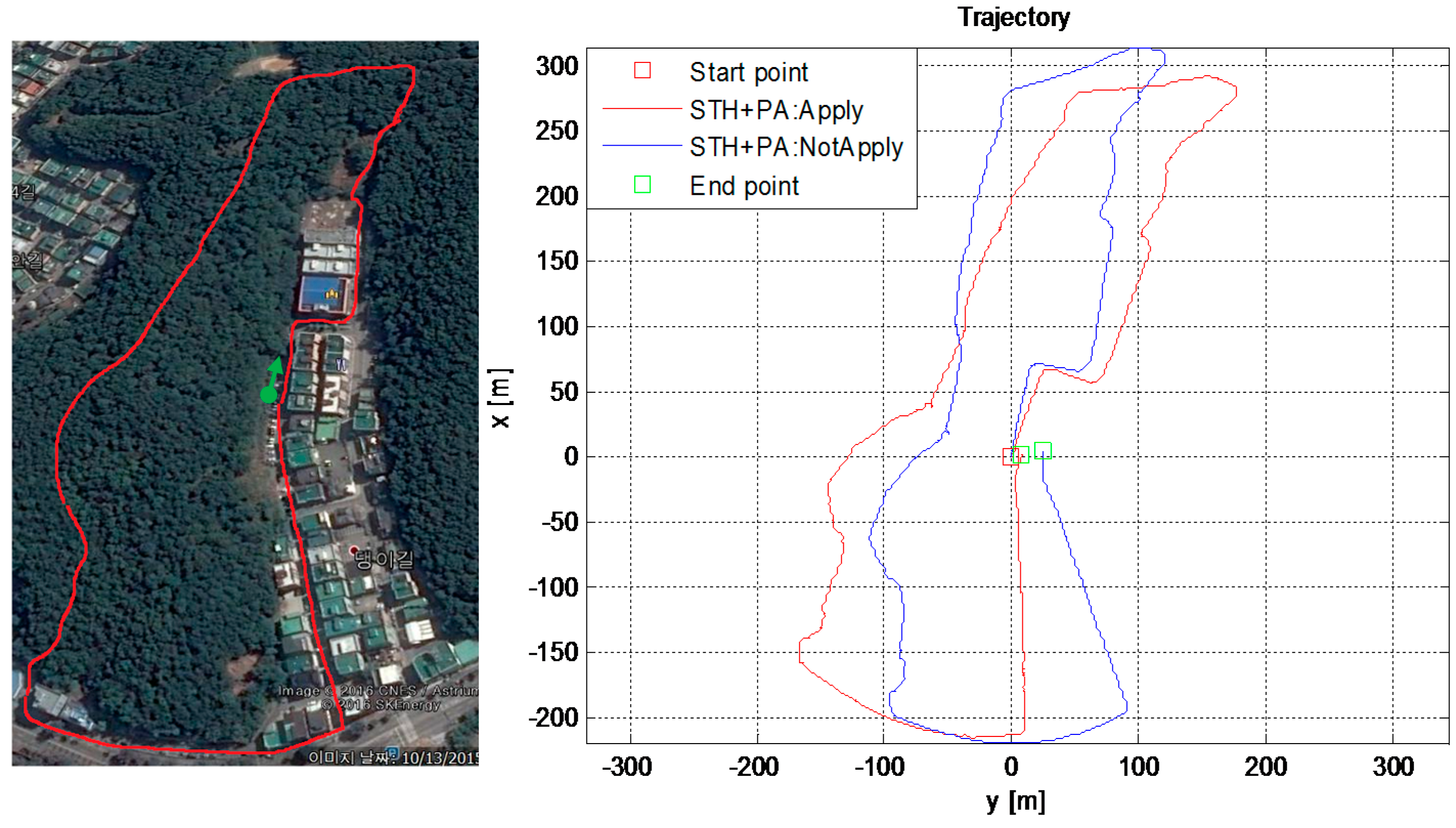
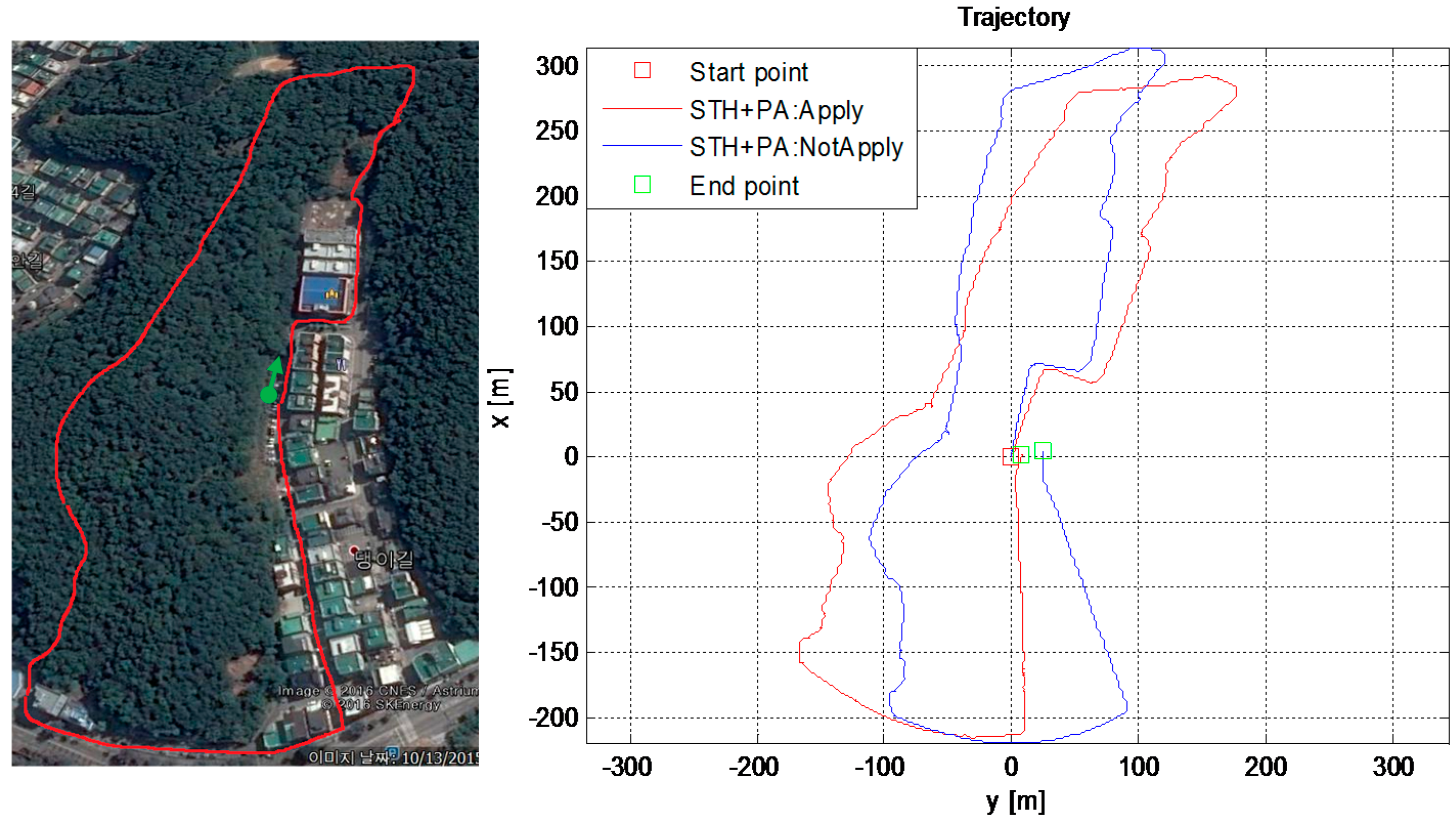
6.6. Forest Canopy Environment Test
7. Experimental Set-up and Evaluation Method for MAD Algorithm
7.1. Static Test
7.2. Moving in a Straight Line Test
7.3. MAD Applied in a Dynamic Test in PNS Application
8. Conclusions
Author Contributions
Conflicts of Interest
References
- Feliz, R.; Zalama, E.; G’Omez, J. Pedestrian tracking using inertial sensors. J. Phys. Agents 2009, 3, 35–42. [Google Scholar]
- Harle, R. A Survey of Indoor Inertial Positioning Systems for Pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Jimenez, A.R.; Seco, F.; Prieto, J.C.; Guevar, J. Indoor pedestrian naigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 7th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 11–12 March 2010.
- ENSCO. Available online: http://www.ensco.com/products-services/security/gps-denied-geolocation-navigation/personnel-navigation.htm (accessed on 2 April 2016).
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Fischer, C.; Sukumar, P.T.; Hazas, M. Tutorial: Implementation of a pedestrian tracker using foot-mounted inertial sensors. IEEE Pervasive Comput. 2013, 12, 17–27. [Google Scholar] [CrossRef]
- Godha, S.; Lachapelle, G. Foot mounted inertial system for pedestrian navigation. Meas. Sci. Technol. 2008, 19. [Google Scholar] [CrossRef]
- John-Olof, N.; Issac, S.; Peter, H. OpenShoe: Foot-Mounted INS for Every Foot. Available online: http://www.openshoe.org (accessed on 2 June 2015).
- Kun-Chan, L.; Wen-Yuah, S. On calibrating the sensor errors of a PDR-Based indoor localization system. Sensors 2013, 13, 4781–4810. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Sysems; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Kim, J. Autonomous Navigation for Airborne Application. Ph.D. Thesis, University of Sydney, Sydney, Australia, 2004. [Google Scholar]
- Ilyas, M.; Kuk, C.; Seung-Ho, B.; Sangdeok, P. Drift reduction in IMU-only pedestrian navigation system in unstructured environment. In Proceedings of the 10th Asian Control Conference (ASCC), Kota Kinabalu, Malyasia, 31 May–3 June 2015; pp. 1–7.
- Young, S. Orientation estimation using a quaternion-based indirect Kalman filter with adaptive estimation of external acceleration. IEEE Trans. Instrum. Meas. 2010, 59, 3296–3305. [Google Scholar]
- Matthew, W. The Design and Implementation of a Robust AHRS for Integration into a Quadrotor Platform; The University of Sheffield: Sheffield, UK, 2013. [Google Scholar]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technolog; The American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2004. [Google Scholar]
- Nilsson, J.-O.; Skog, I.; Handel, P. A note on the limitations of ZUPTs and the implications on sensor error modeling. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012.
- Bebek, O. Personal navigation via high-resolution gait-corrected inertial measurement units. IEEE Trans. Instrum. Meas. 2010, 59, 3018–3027. [Google Scholar] [CrossRef]
- Guo, Q.; Bebek, O.; Cavusoglu, M.C.; Mastrangelo, C.H.; Young, D.J. A personal navigation system using MEMS-based high-density ground reaction sensor array and inertial measurement unit. In Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 1077–1080.
- Skog, I.; Nilsson, J.-O.; Rantakokko, J. Zero-Velocity Detection—An Algorithm Evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Skog, I.; Nilsson, J.-O.; Handel, P. Evaluation of zero-velocity detector for foot-mounted inertial navigation systems. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6.
- Ramanandan, A.; Chen, A.; Farrel, J.A. Obserbability analysis of an inertial navigation system with stationary updates. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011.
- Sang, K.P.; Young, S.S. A zero velocity detection algorithm using inertial sensors for pedestrian navigation systems. Sensors 2010, 10, 9163–8178. [Google Scholar]
- Abdulrahim, K.; Chris, H.; Moore, T.; Hill, C. Using constraints for shoe mounted indoor pedestrian navigation. J. Navig. 2012, 15, 15–28. [Google Scholar] [CrossRef]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Aiding low cost inertial navigation with building heading for Pedestrian navigation. J. Navig. 2011, 64, 219–233. [Google Scholar] [CrossRef]
- Borenstein, J.; Ojeda, L.; Kwanmuang, S. Heuristic reduction of gyro drift for personnel tracking systems. J. Navig. 2009, 62, 41–58. [Google Scholar] [CrossRef]
- Nilsson, J.-O.; Handel, P. Standing still with inertial navigation. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbéliard-Belfort, France, 28–31 October 2013.
- Renaudin, V.; Haris Afzal, M.; Lachapelle, G. Complete Triaxis Magnetometer Calibration in the Magnetic Domain. J. Sens. 2010. [Google Scholar] [CrossRef]
- Caruso, M.; Withanawasam, L. Vehicle Detection and Compass Applications Using AMR Magnetic Sensors. Available online: https://aerospace.honeywell.com/en/~/media/aerospace/files/technical-articles/vehicledetectionandcompassapplicationsusingamrmagneticsensors_ta.pdf (accessed on 8 September 2016).
- Yadav, N.; Bleakley, C. Accurate orientation estimation using AHRS under conditions of magnetic distortion. Sensors 2014, 14, 20008–20024. [Google Scholar] [CrossRef] [PubMed]
- Prieto, J.; Mazuelas, S.; Bahillo, A.; Fernand, P.; Lorenzo, R.M.; Abril, E.J. Pedestrian navigation in harsh environments using wireless and inertial measurements. In Proceedings of the 10th Workshop on Positioning, Navigation and Comunication (WPNC), Dresden, Germany, 20–21 March 2013.
- LORD MicroStrain. Available online: http://www.microstrain.com/inertial/3dm-gx3-45 (accessed on 6 September 2016).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | 2D RMS Error (m) | 3D RMS Error (m) | Remarks |
|---|---|---|---|
| PA-Lock Not applied | 0.043678 | 1.817 | Time: 15 min |
| PA-Lock applied | 0.00079767 | 0.20591 | |
| Improvement | 40 times | 10 times |
| Method | Roll RMS Error (°) | Pitch RMS Error (°) | Yaw RMS Error (°) |
|---|---|---|---|
| PA-Lock Not applied | 0.3450 | 0.0919 | 24.482 |
| PA-Lock applied | 0.234 | 0.056 | 1.3125 |
| Improvement | 47% | 62% | 15 times |
| Method | 2D RMS Error (m) | 3D RMS Error (m) | Remarks |
|---|---|---|---|
| STH Not applied | 4.01 | 5.13 | Time: 15 min Distance: 380 m Error/100 m: ≈0.8 m |
| STH applied | 2.12 | 2.50 | |
| Improvement | 89% | 100% |
| Method | 2D RMS Error (m) | 3D RMS Error (m) | Remarks |
|---|---|---|---|
| STH + PA Not applied | 26.584 | 29.543 | Time: 45 min Distance: 1000 m Error/100 m: ≈1.5 m |
| STH + PA applied | 14.427 | 19.797 | |
| Improvement | 84.27% | 49.23% |
| Method | 2D RMS Error (m) | 3D RMS Error (m) | Remarks |
|---|---|---|---|
| STH+PA Not applied | 24.422 | 30.192 | Time: 40 min Distance: 11,000 m Error/100 m: ≈1 m |
| STH+PA applied | 8.0627 | 20.606 | |
| Improvement | 202.9% | 46.52% |
| Method | 2D RMS Error (m) | 3D RMS Error (m) | Remarks |
|---|---|---|---|
| No MAD applied | 9.8 | 12.84 | Time: 30 min Distance: 500 m Error/100 m: ≈0.7 m |
| With MAD | 3.24 | 9.21 | |
| Improvement | 2 times | 39% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ilyas, M.; Cho, K.; Baeg, S.-H.; Park, S. Drift Reduction in Pedestrian Navigation System by Exploiting Motion Constraints and Magnetic Field. Sensors 2016, 16, 1455. https://doi.org/10.3390/s16091455
Ilyas M, Cho K, Baeg S-H, Park S. Drift Reduction in Pedestrian Navigation System by Exploiting Motion Constraints and Magnetic Field. Sensors. 2016; 16(9):1455. https://doi.org/10.3390/s16091455
Chicago/Turabian StyleIlyas, Muhammad, Kuk Cho, Seung-Ho Baeg, and Sangdeok Park. 2016. "Drift Reduction in Pedestrian Navigation System by Exploiting Motion Constraints and Magnetic Field" Sensors 16, no. 9: 1455. https://doi.org/10.3390/s16091455