
Novel Robotic Platforms for the Accurate Sampling and Monitoring of Water Columns


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
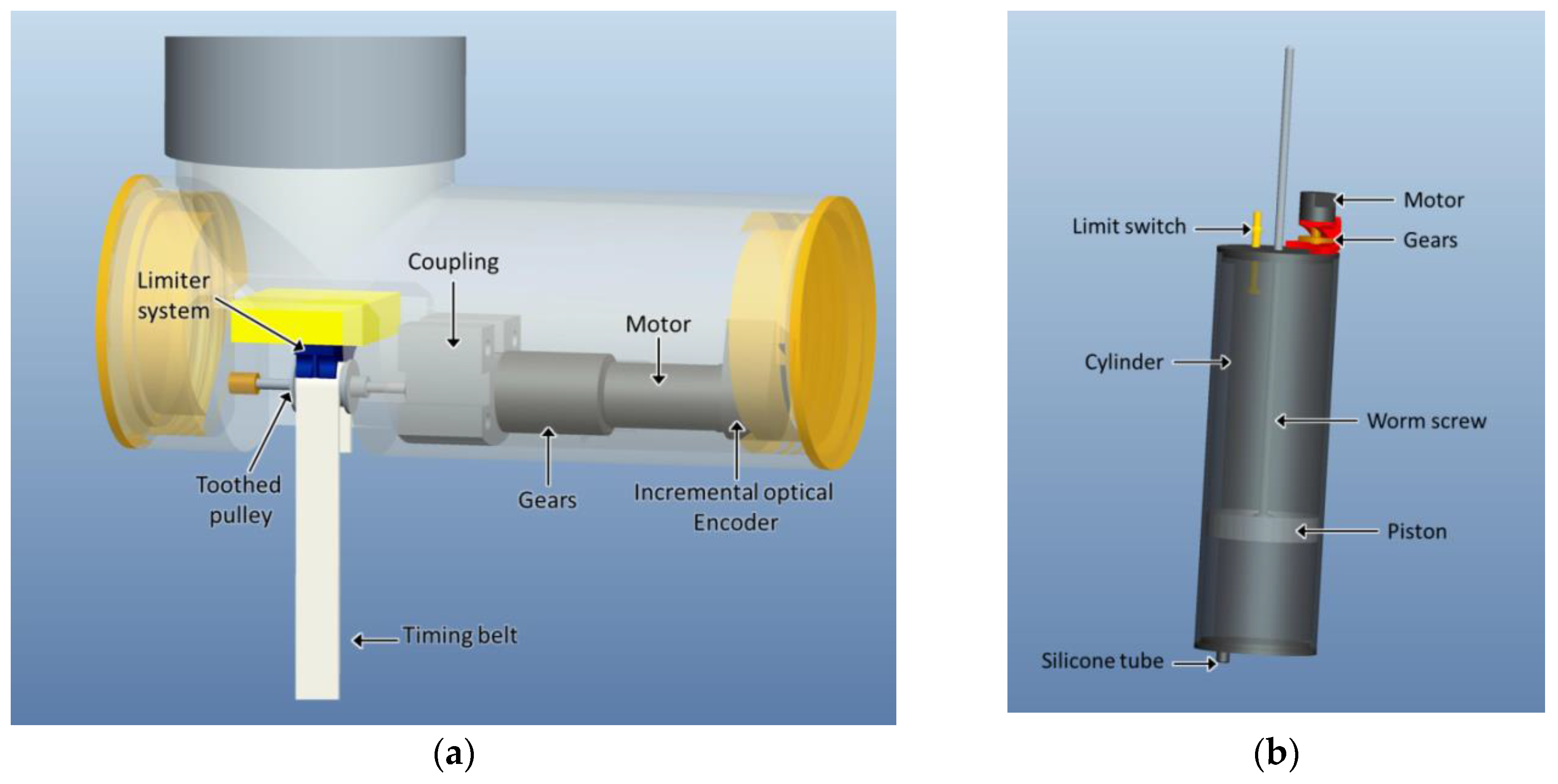
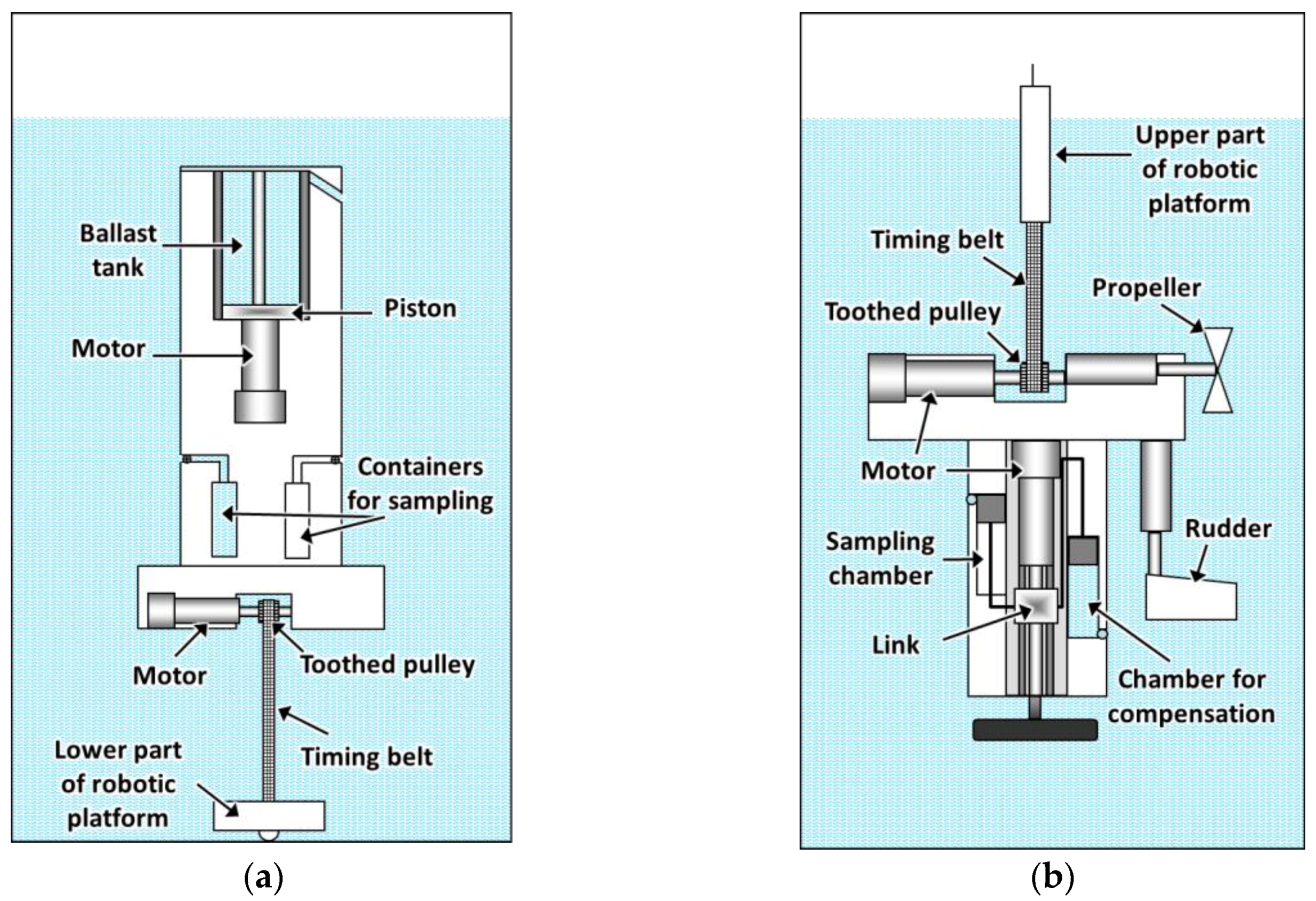
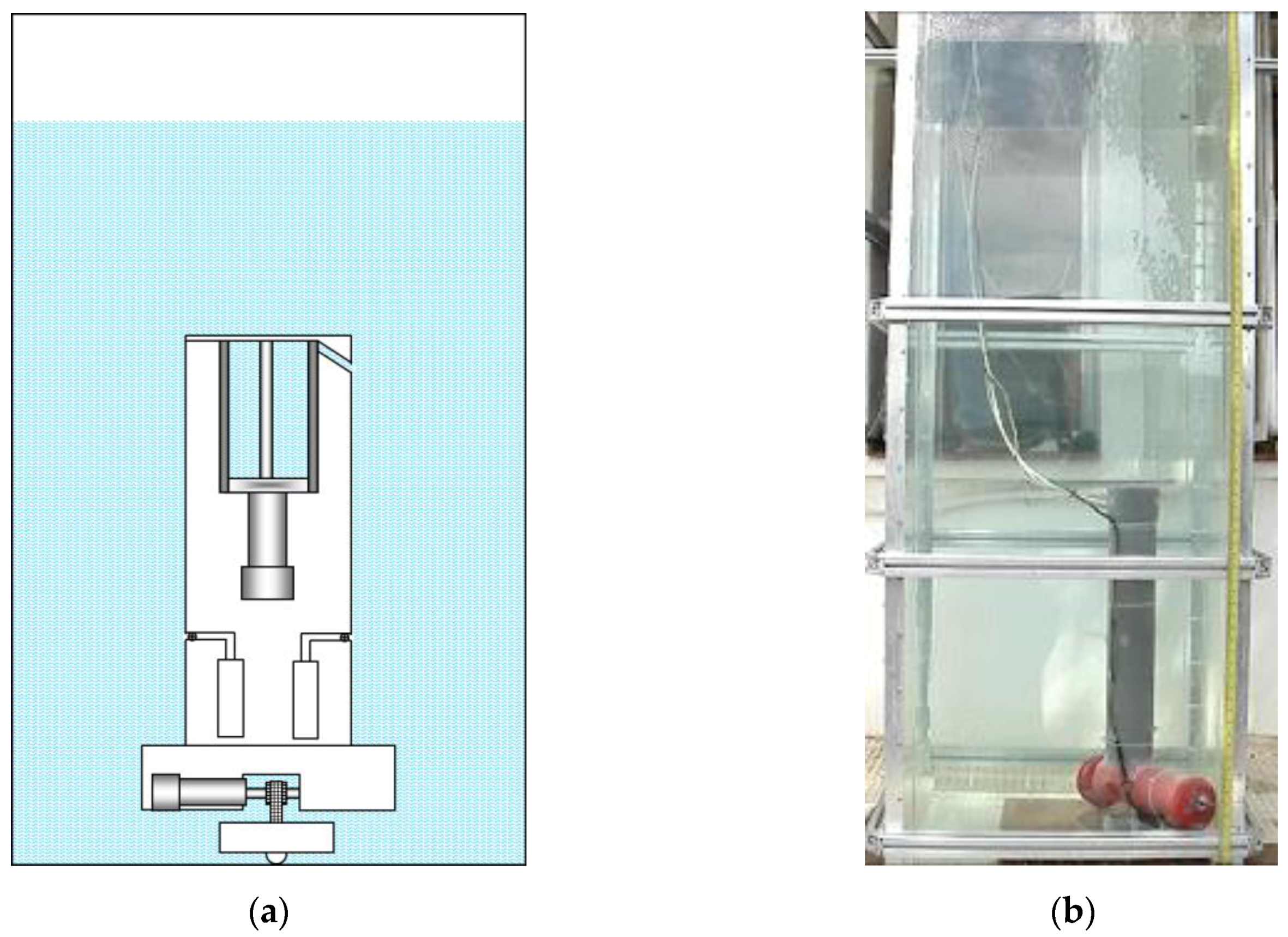
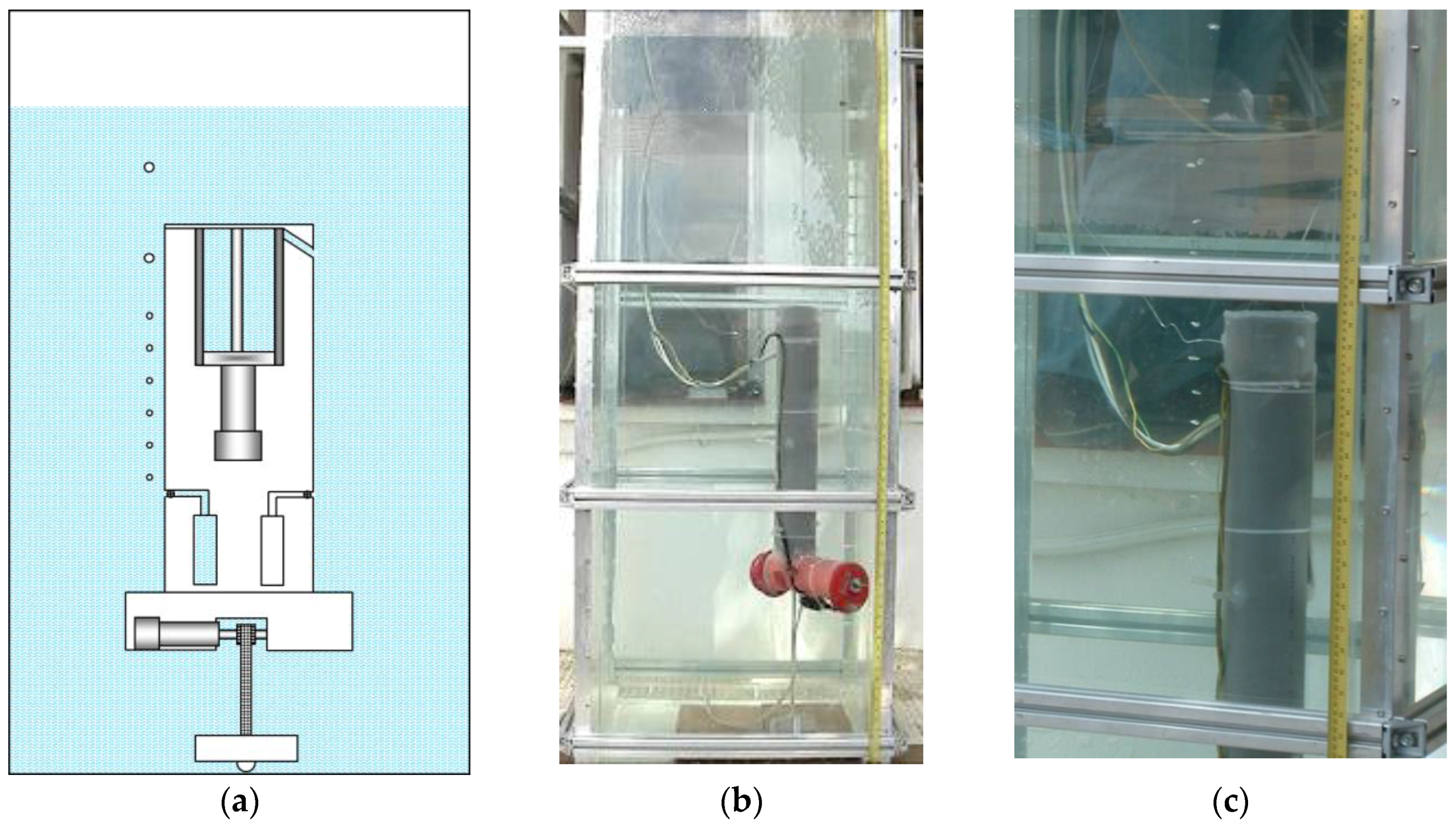
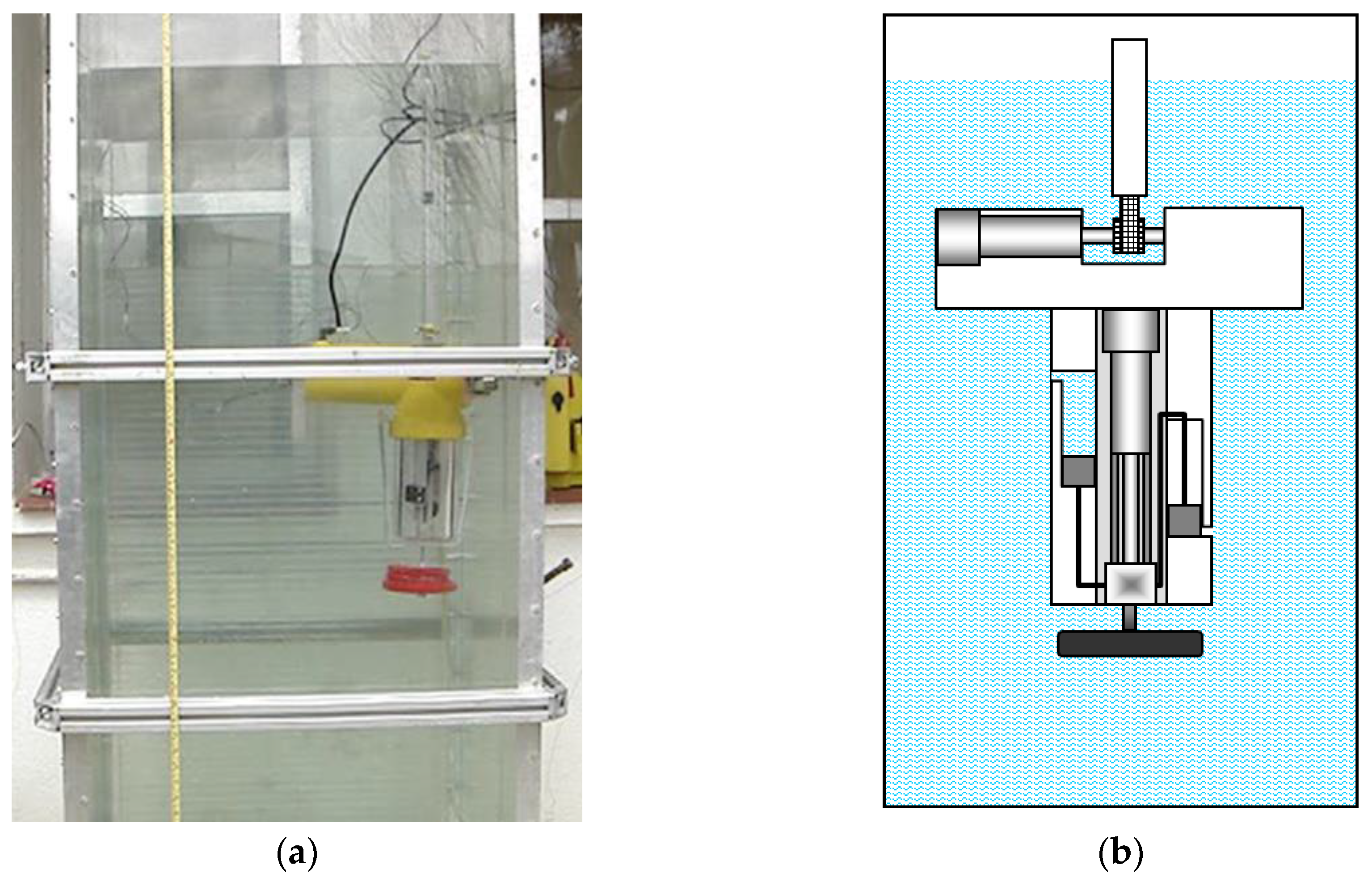
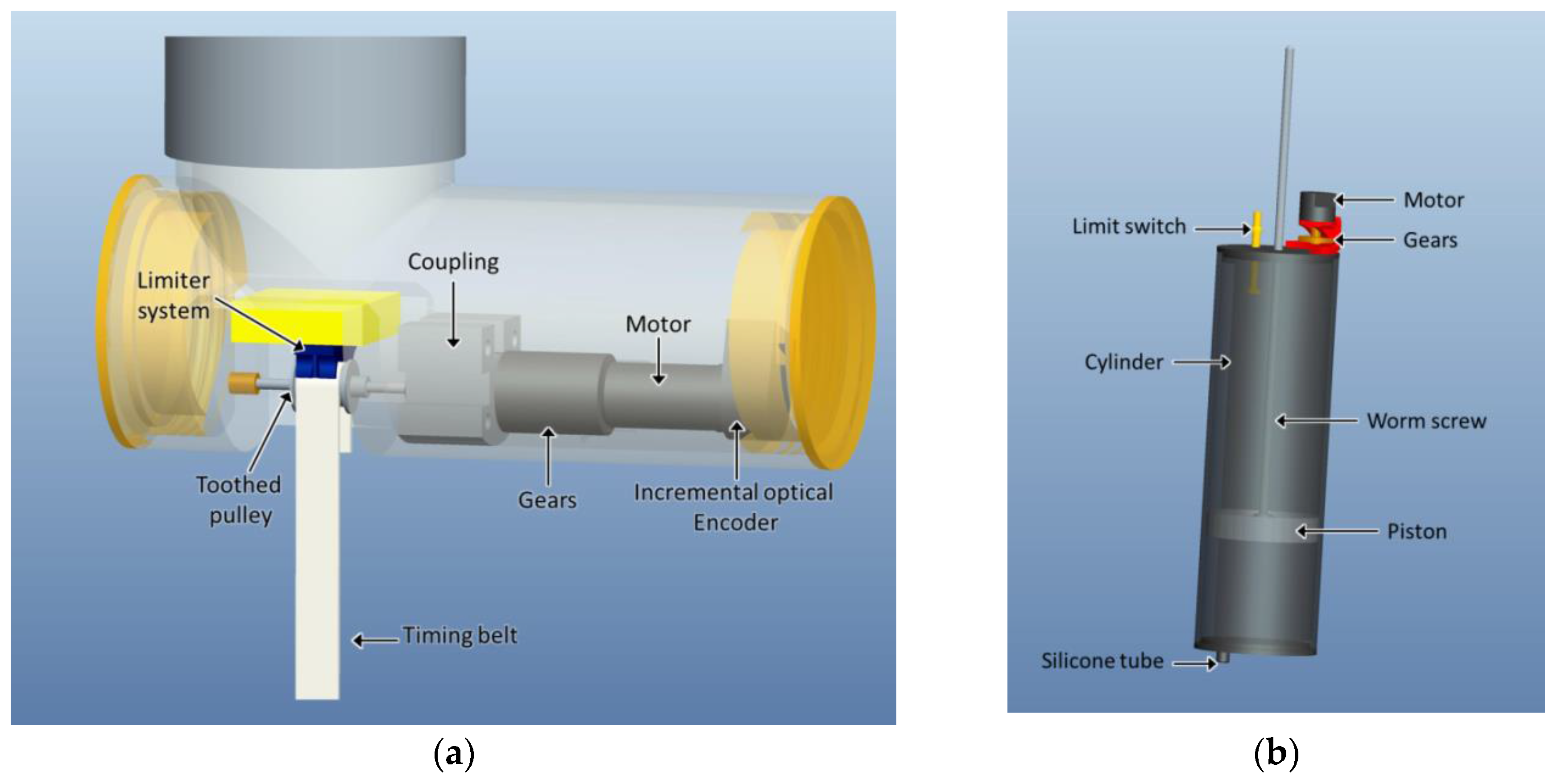
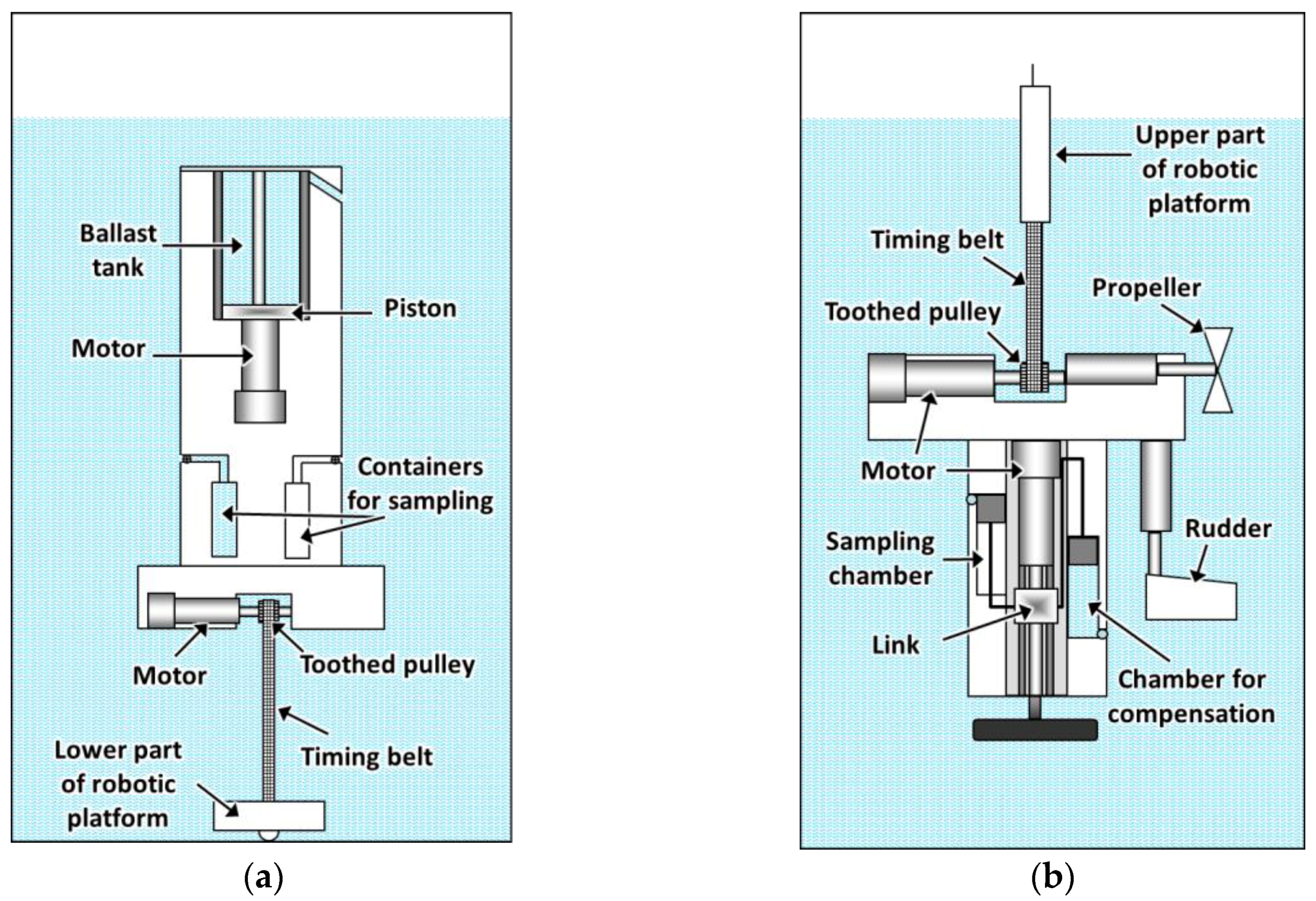
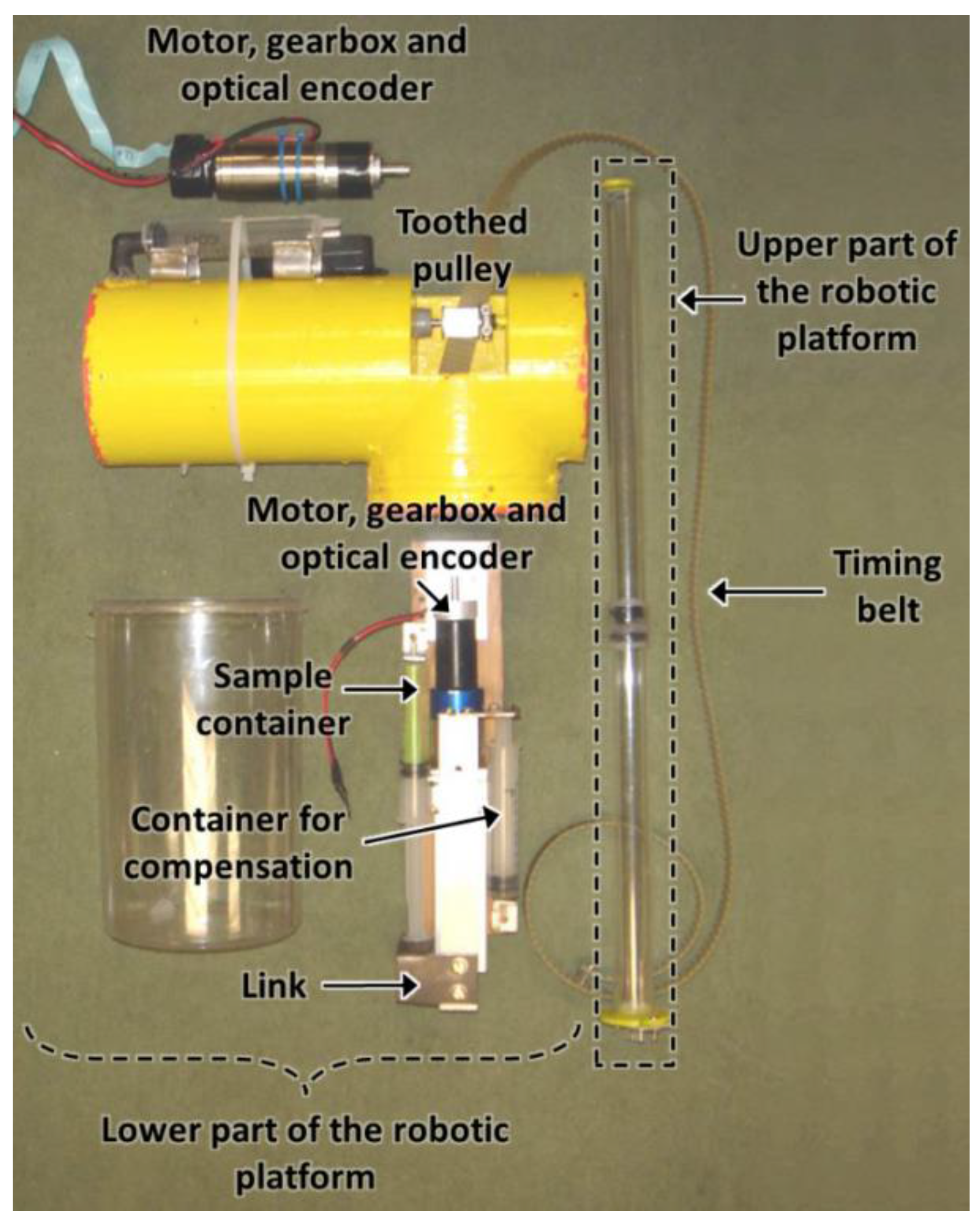
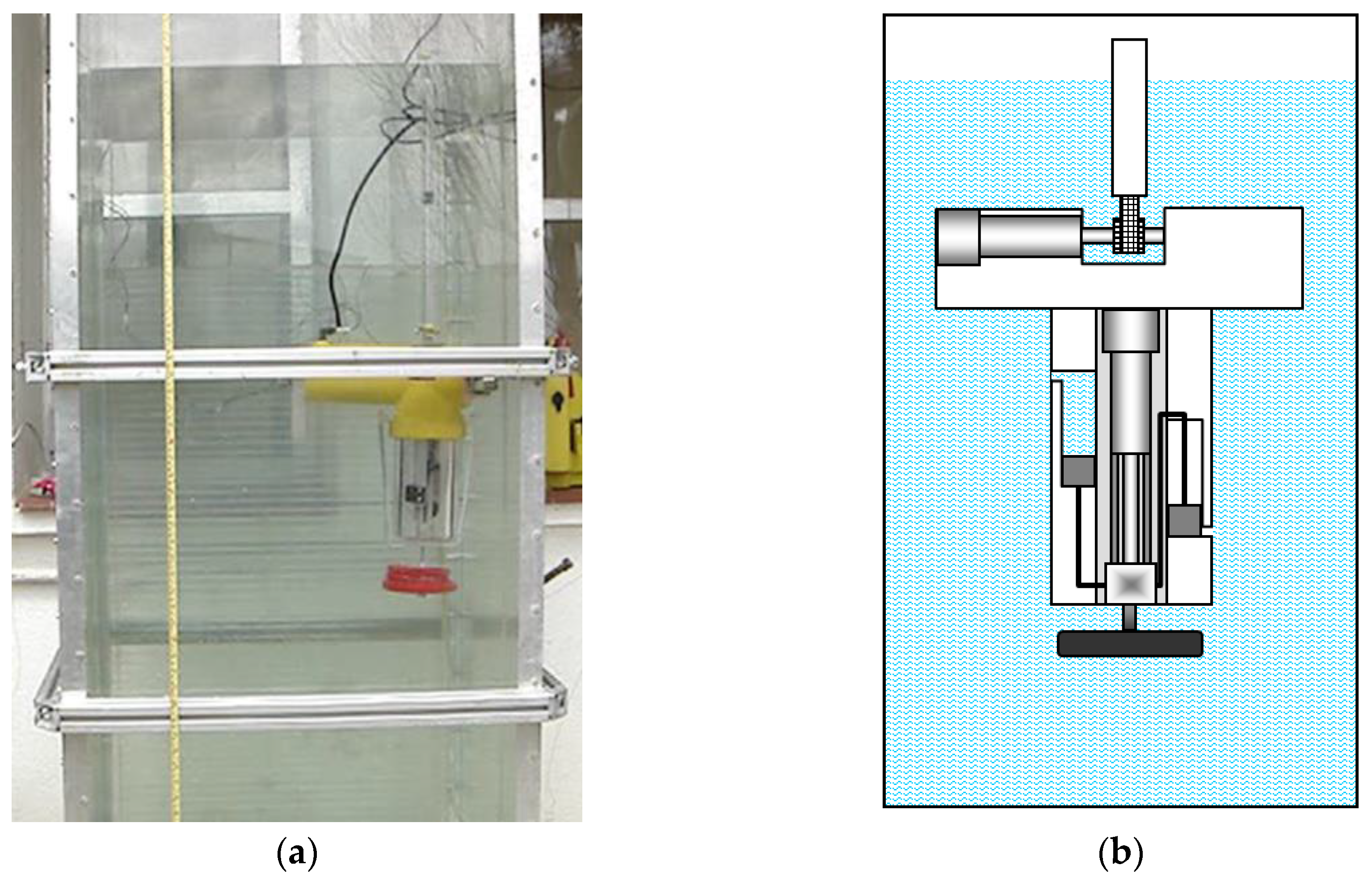
2.1. Underwater Platform Conceived for Operating near a Reservoir Bottom
- The upper part of the platform should always have positive buoyancy.
- The lower part of the platform should always have negative buoyancy.
- The platform, as a whole, should have positive buoyancy if the ballast tank is empty.
- The platform, as a whole, should have negative buoyancy if the ballast tank is filled with water.
- Buoyancy, positive or negative, should always have a reserve margin.
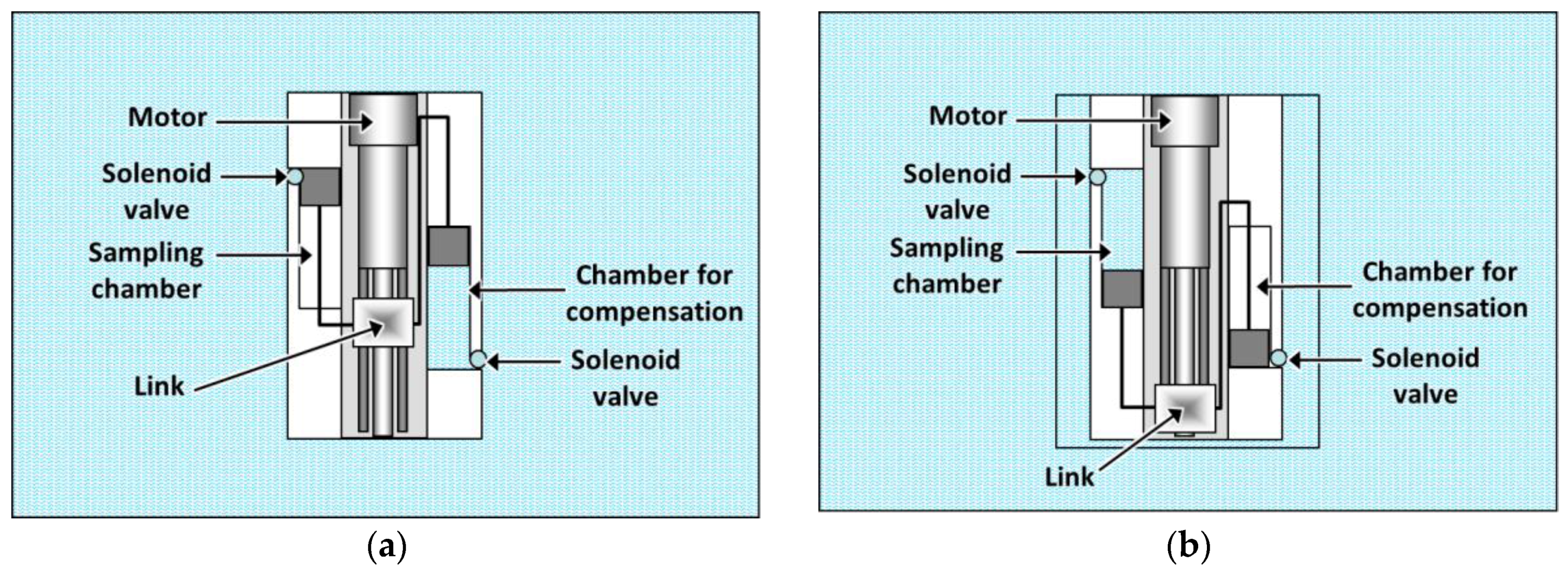
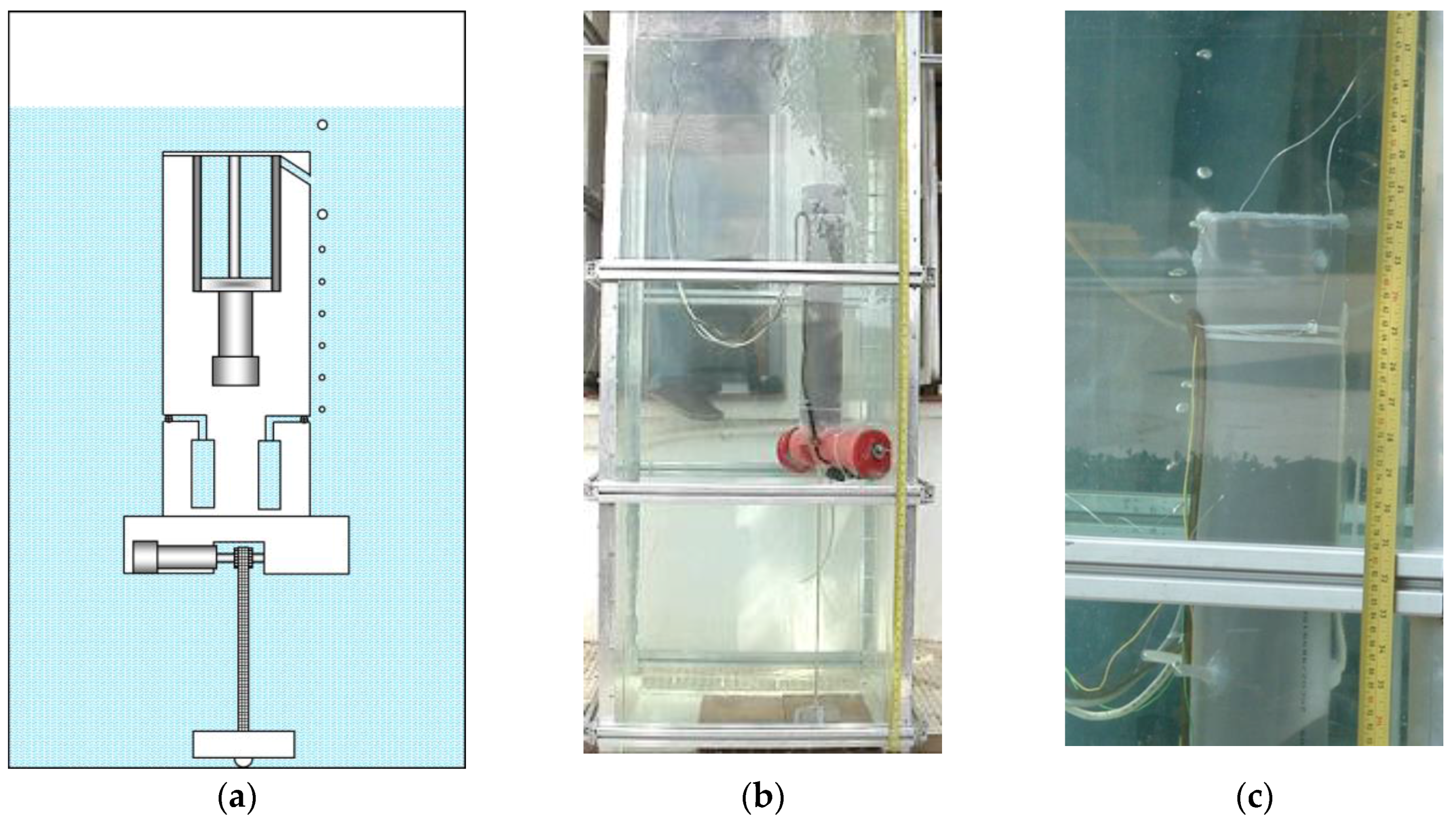
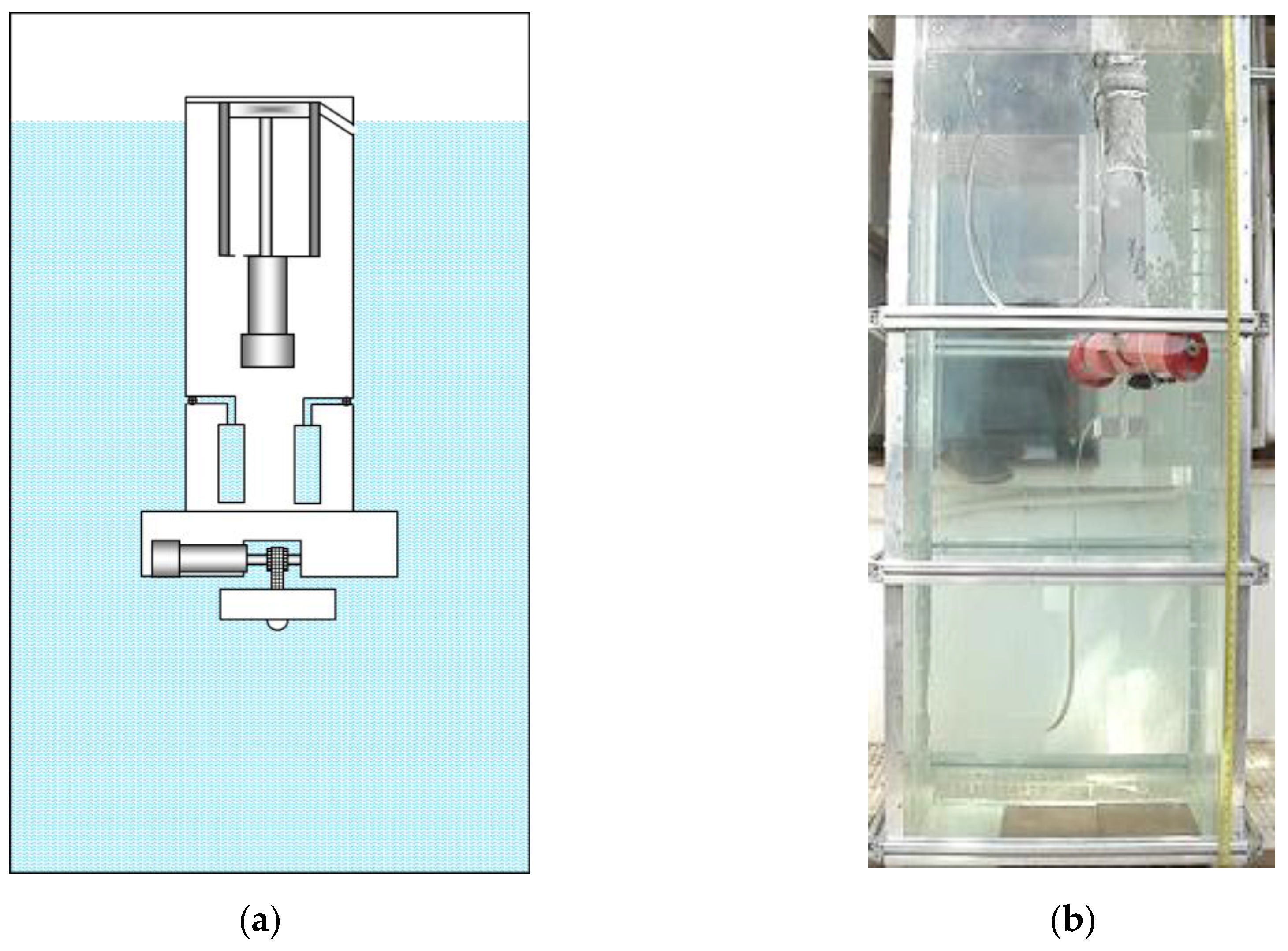
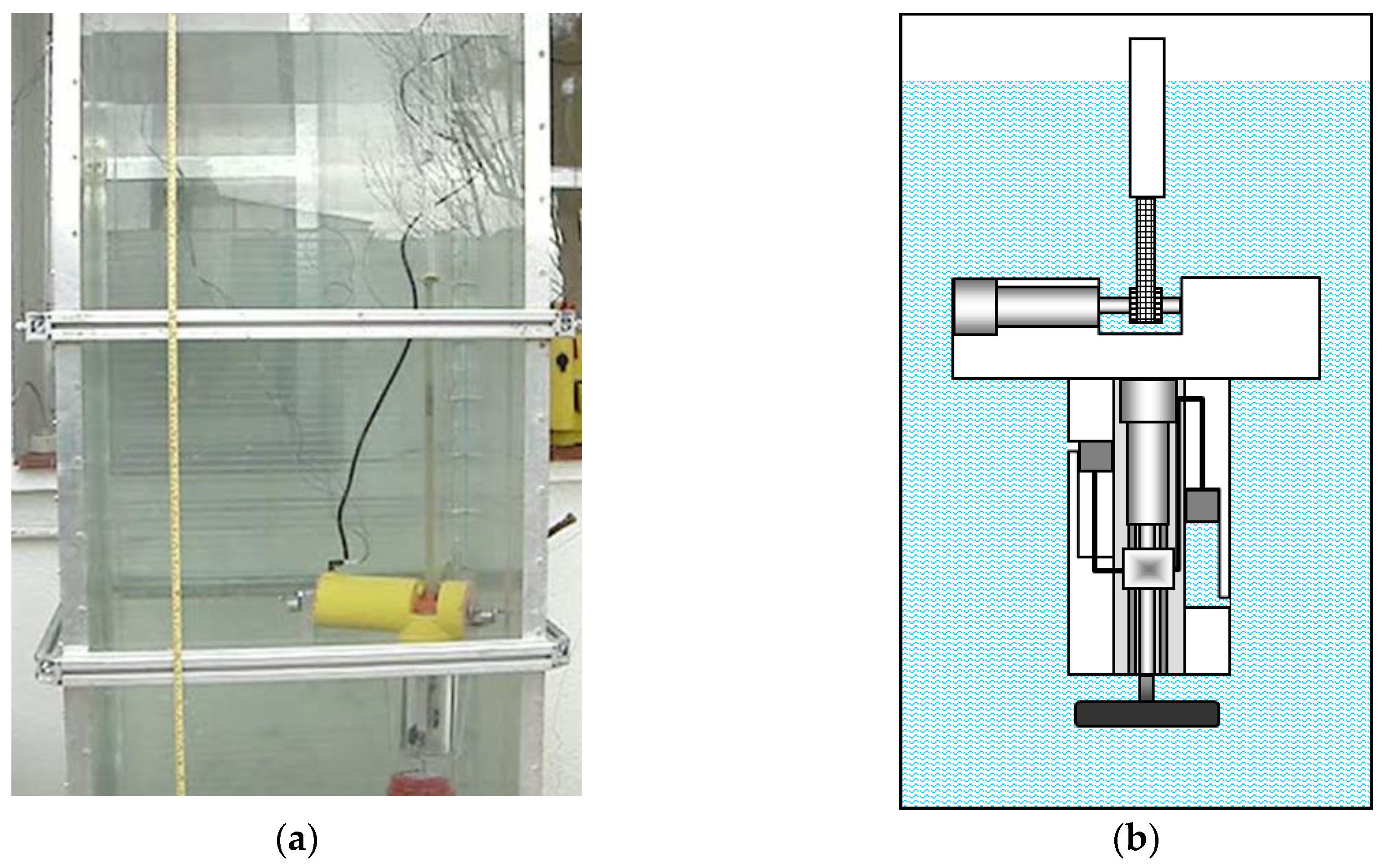
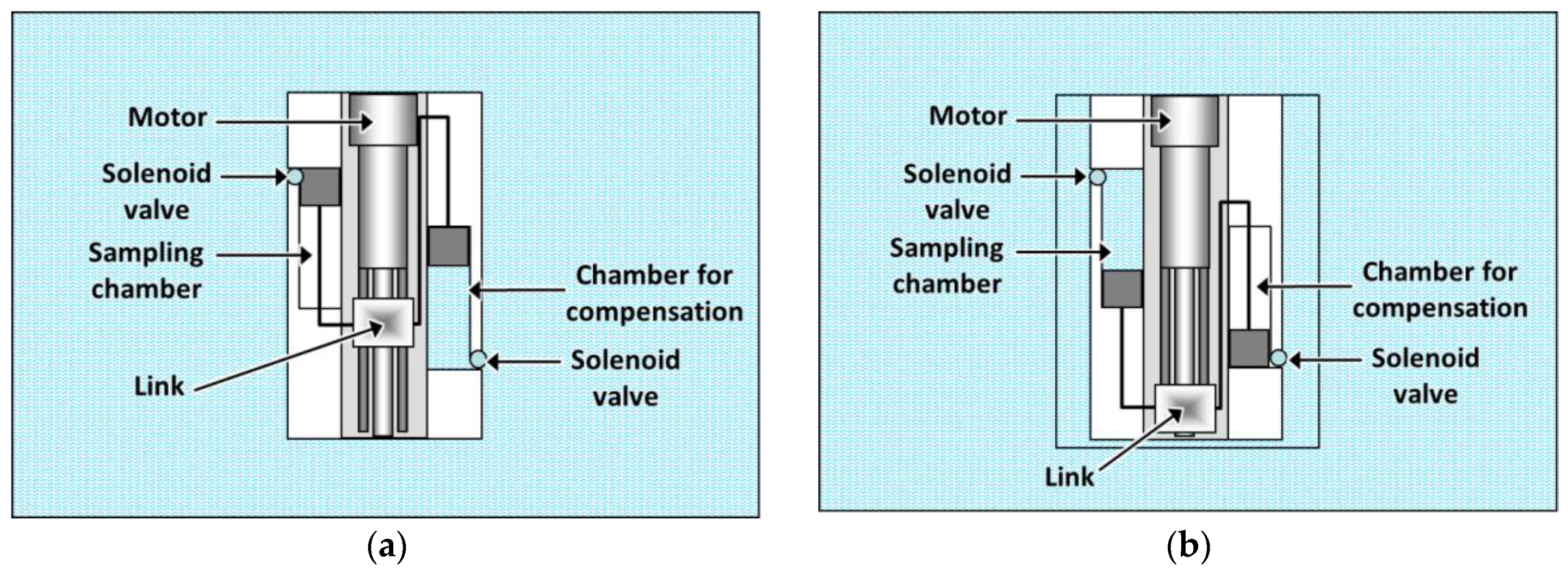
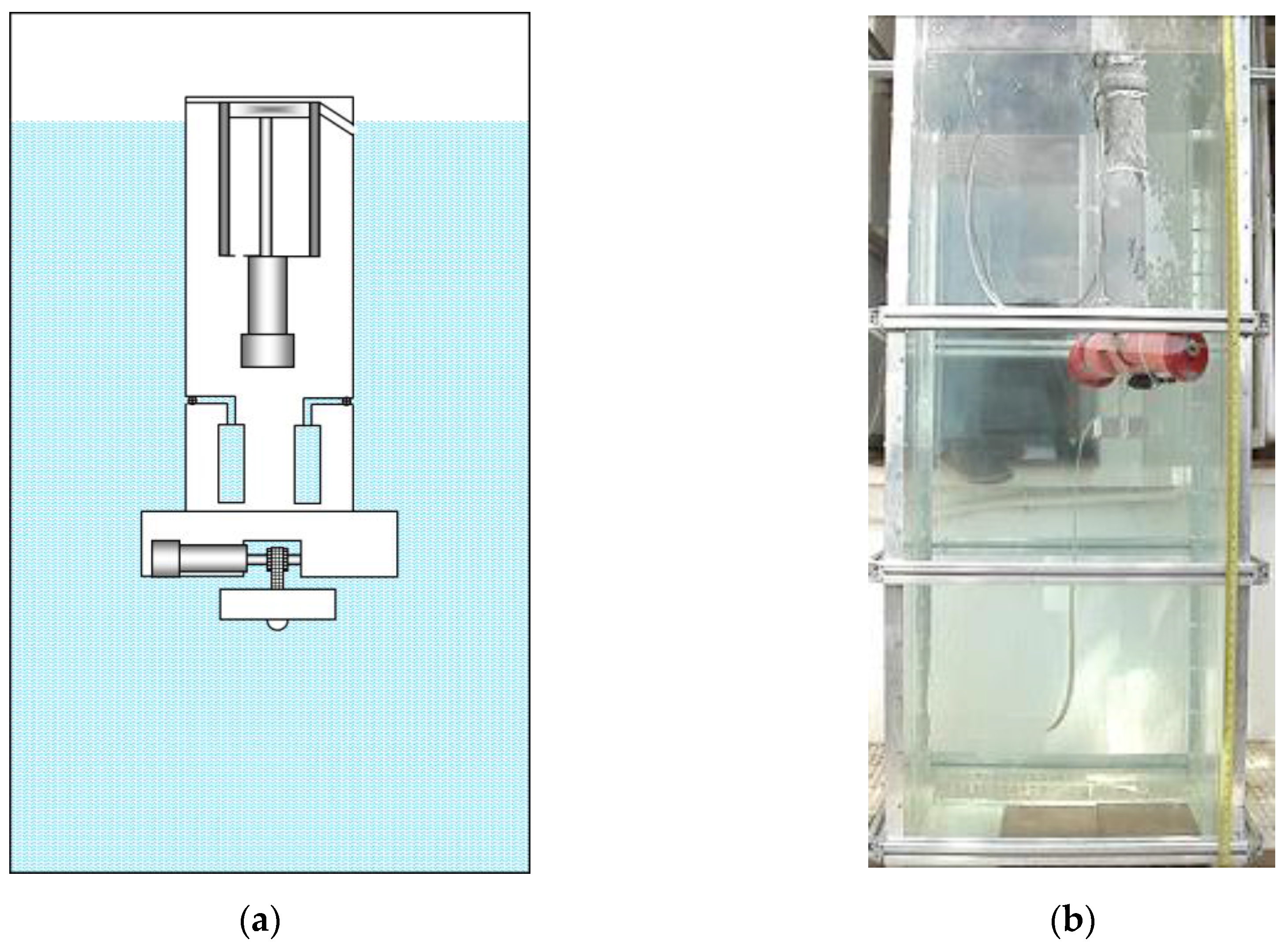
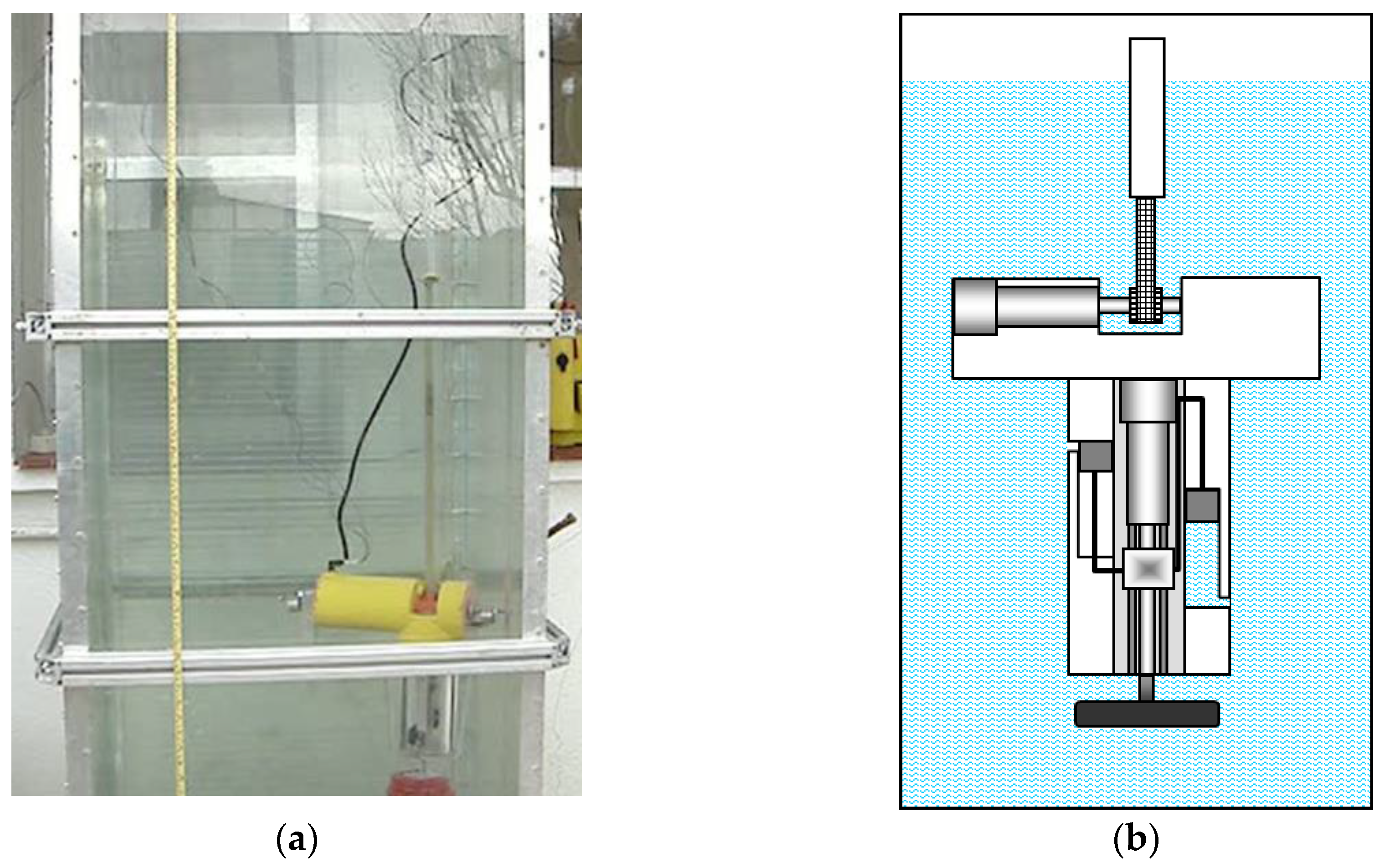
2.2. Platform Conceived for Operating Near the Water Surface
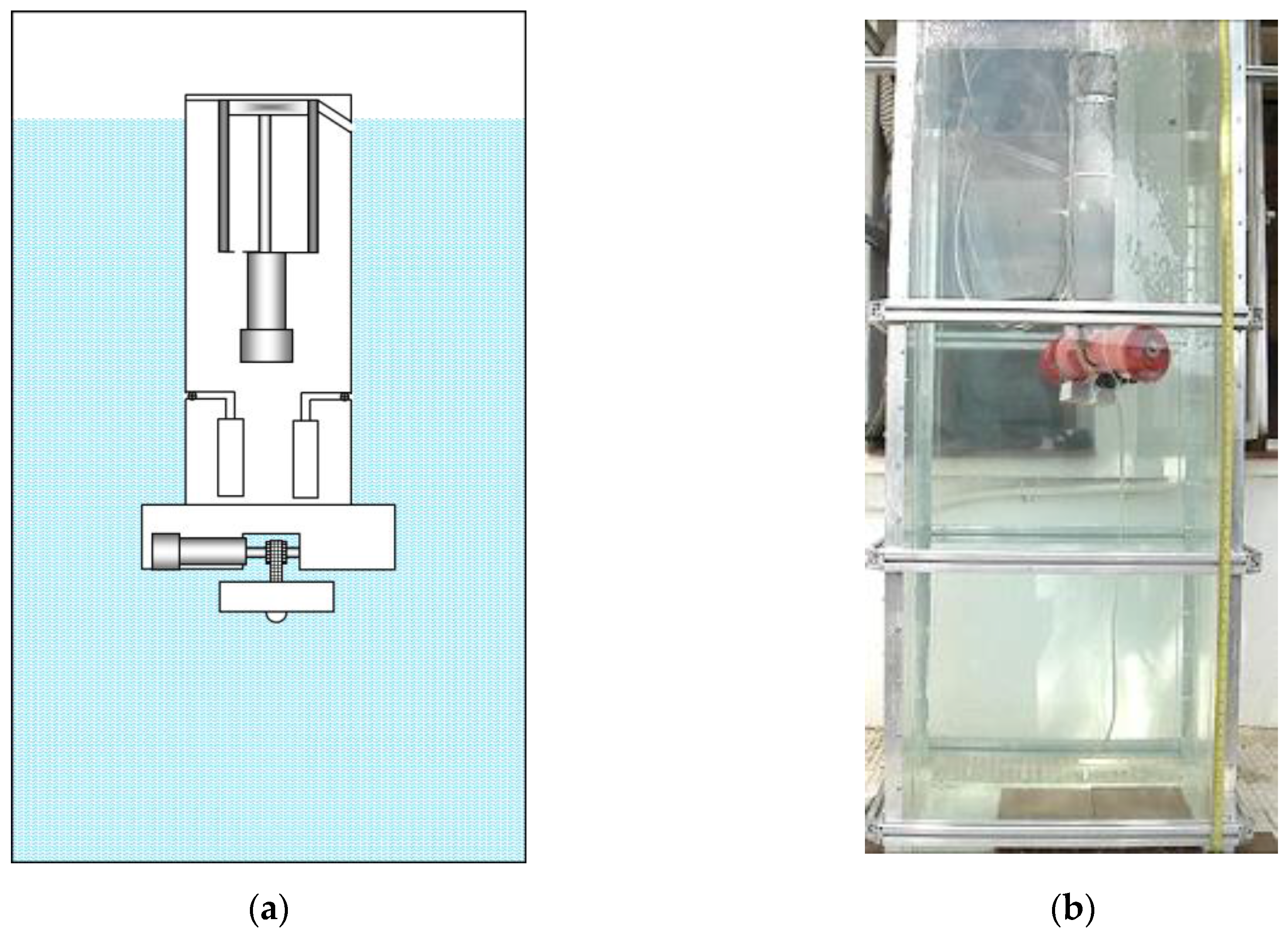
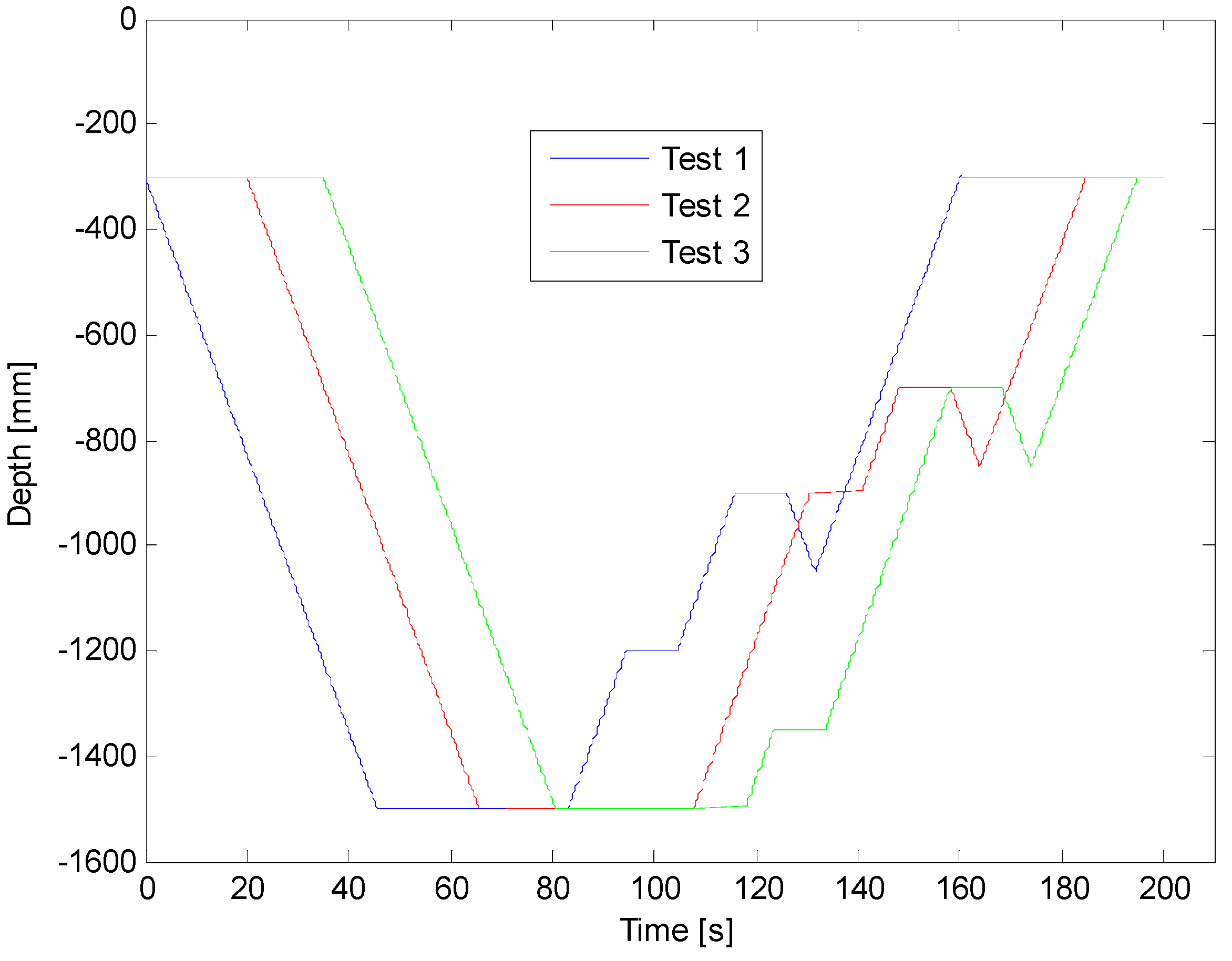
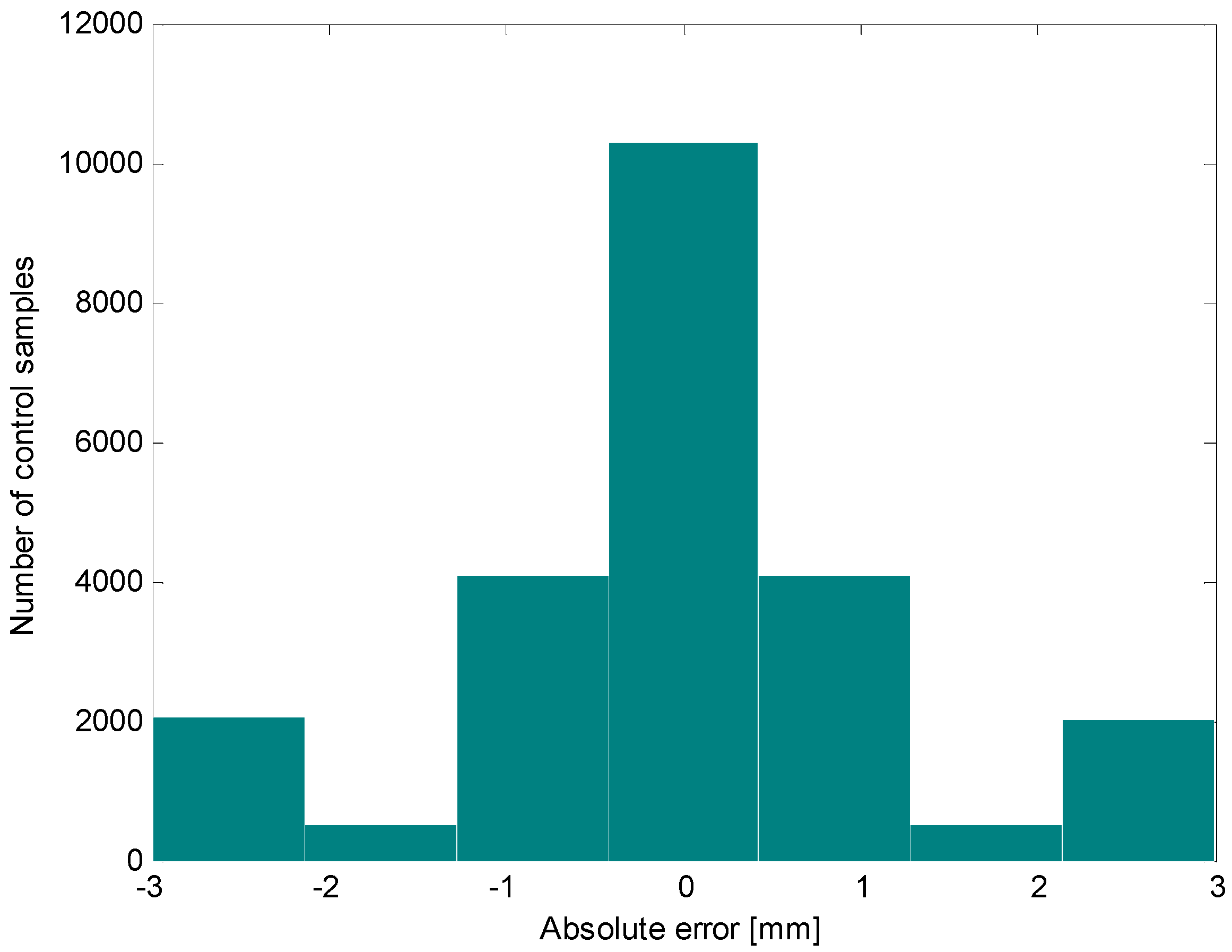
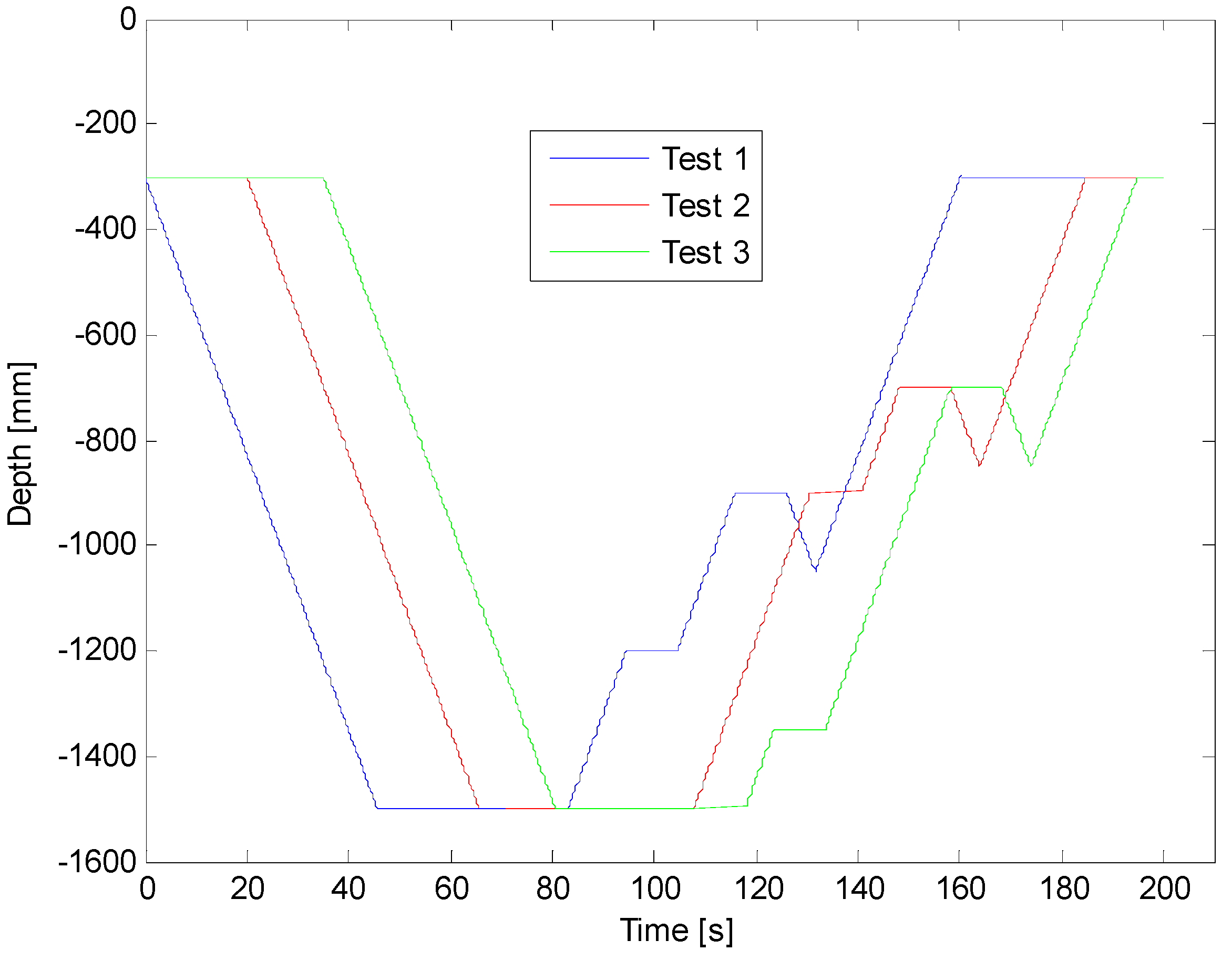
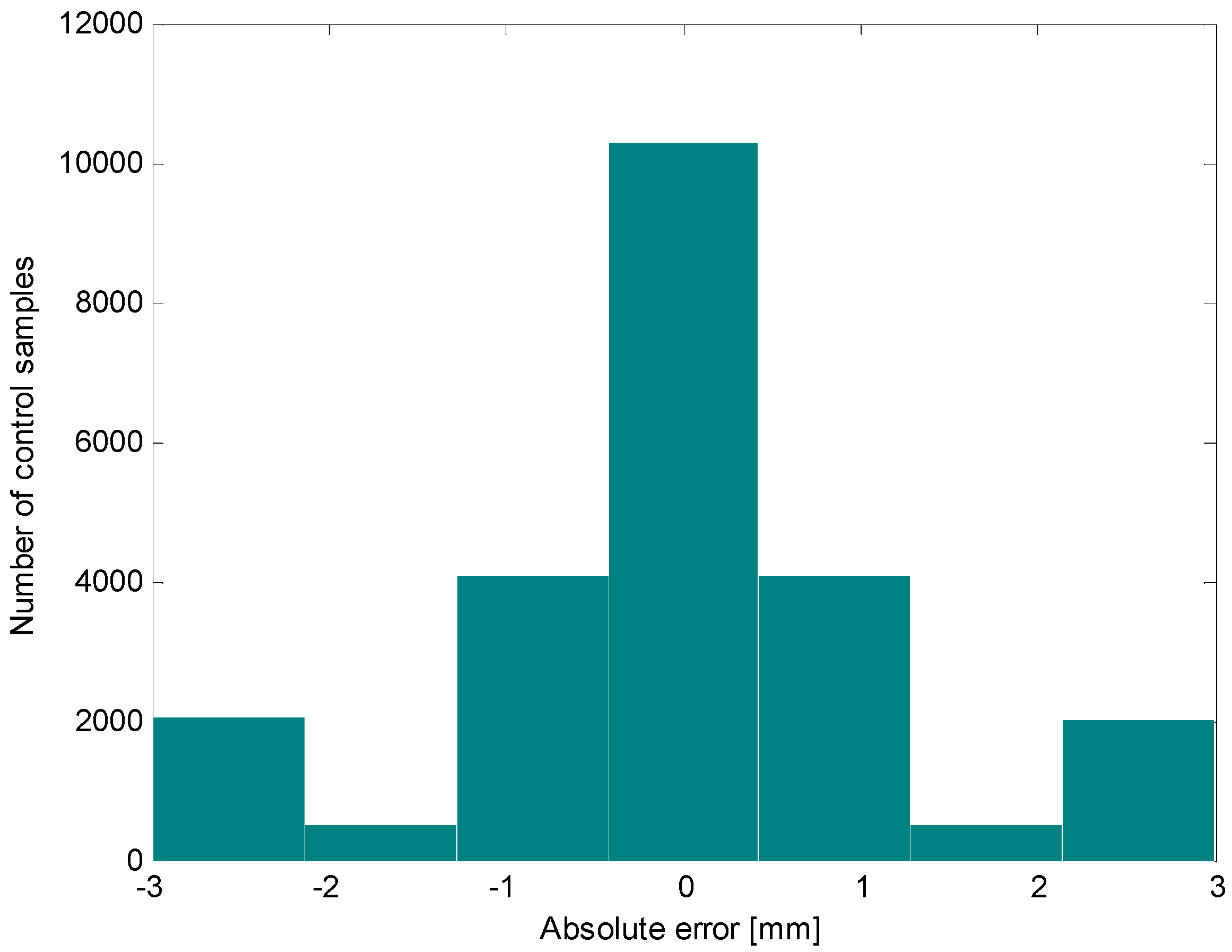
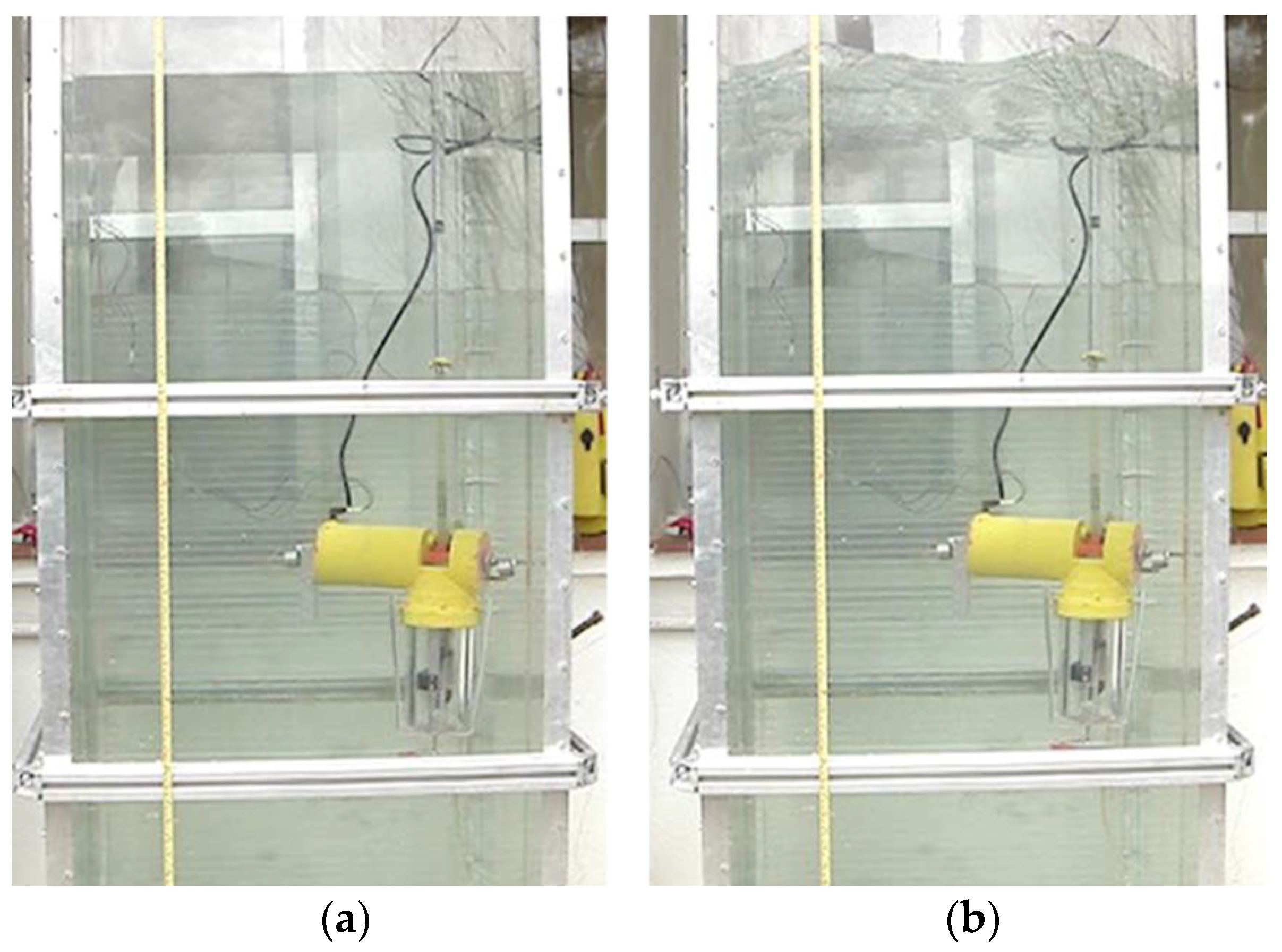
3. Experimental Results and Discussion
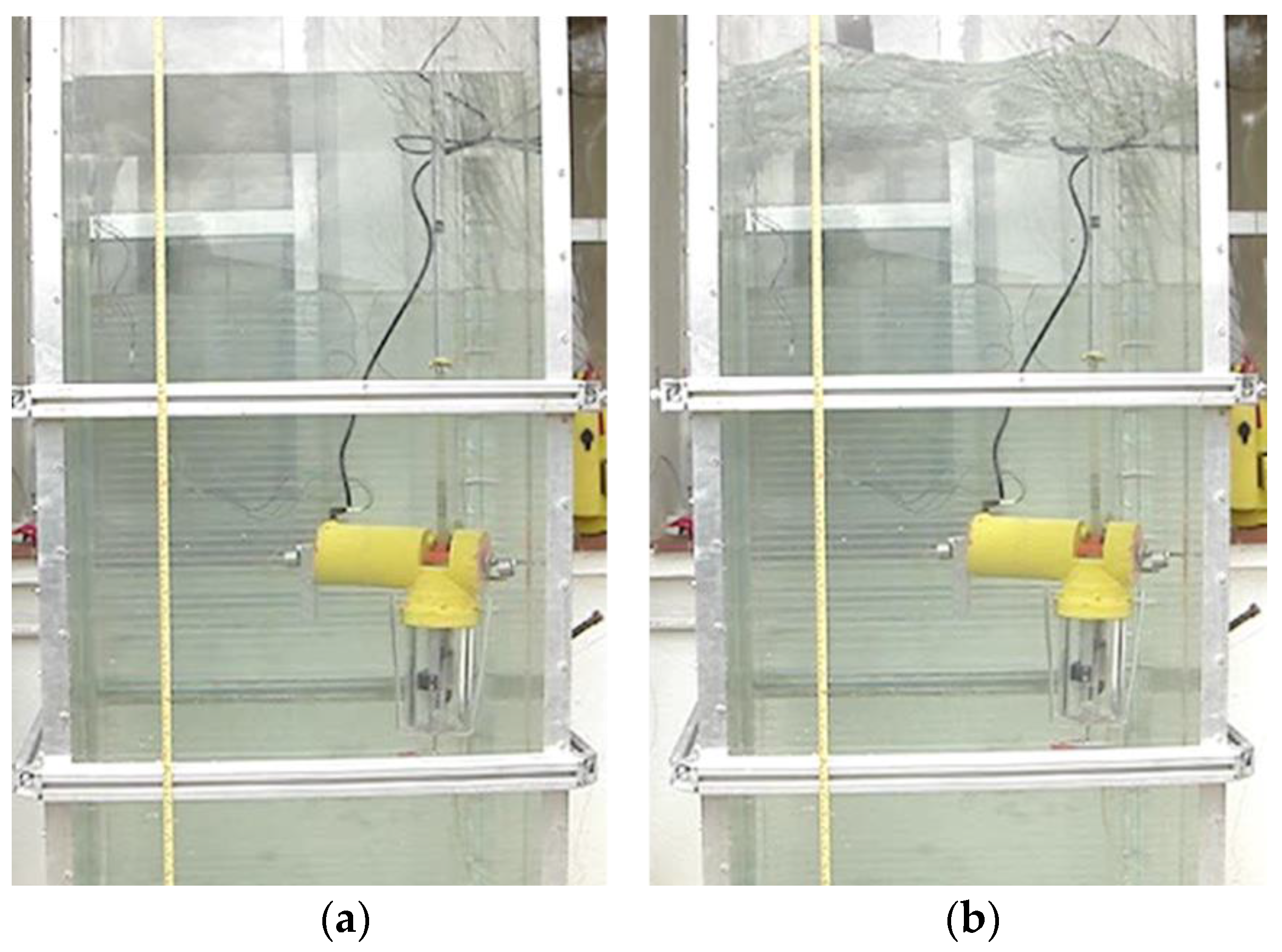
- The presence of currents with different velocities along the water column, which can produce the inclination of the toothed timing belt, and consequently the inclination of the upper and/or the lower part of the robotic platform.
- The temperature dependence on the water depth of immersion, which can deform the toothed timing belt, modifying its length. These variations in water temperature can modify the effective length of the toothed timing belt in 1 cm.
- The installation of high-precision inclinometers in the lower and the upper part of the robotic platforms. Information provided by these sensors would enable the estimation of the tilt angle on the toothed timing belt and, consequently, would contribute to correct regulation of the effective length of the toothed timing belt for achieving the desired depth.
- The installation of a temperature sensor in the upper or the lower part of the robotic platform (in the upper part for the first robotic platform, and in the lower part for the second robotic platform). Taking into consideration the material the toothed timing belt is made of, information provided by this sensor can be used by the control system to compensate for the error introduced by the deformation of the belt.
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CTD | oceanography instrument used to determine the Conductivity, Temperature, and Depth of the ocean |
| AUV | Autonomous Underwater Vehicle |
| BSOP | Bottom Stationing Ocean Profiler |
| GPS | Global Positioning System |
References
- Gutiérrez, M.H.; Pantoja, S.; Quiñones, R.A.; González, R.R. First record of filamnetous fungi in the coastal upwelling ecosystem off central Chile. Gayana 2010, 74, 66–73. [Google Scholar]
- Silva, A.; Medeiros, P.R.; Silva, M.; Barbosa, J. Diel vertical migration and distribution of zooplankton in a tropical Brazilian reservoir. Biotemas 2009, 22, 49–57. [Google Scholar] [CrossRef]
- Breier, J.A.; Rauch, C.G.; McCartney, K.; Toner, B.M.; Fakra, S.C.; White, S.N.; German, C.R. A suspended-particle rosette multi-sampler for discrete biogeochemical sampling in low-particle-density waters. Deep Sea Res. I Oceanogr. Res. Pap. 2009, 56, 1579–1589. [Google Scholar] [CrossRef]
- Dagg, M.J.; Jackson, G.A.; Checkley, D.M., Jr. The distribution and vertical flux of fecal pellets from large zooplankton in monterey bay and coastal California. Deep Sea Res. I Oceanogr. Res. Pap. 2014, 94, 72–86. [Google Scholar] [CrossRef]
- Wassmann, P.; Hansen, L.; Andreassen, I.J.; Riser, C.W.; Urban-Rich, J.; Båmstedt, U. Distribution and sedimentation of faecal on the nordvestbanken shelf, northern Norway, in 1994. Sarsia 1999, 84, 239–253. [Google Scholar] [CrossRef]
- Ding, T.P.; Gao, J.F.; Tian, S.H.; Wang, H.B.; Li, M. Silicon isotopic composition of dissolved silicon and suspended particulate matter in the yellow river, China, with implications for the global silicon cycle. Geochim. Cosmochim. Acta 2011, 75, 6672–6689. [Google Scholar] [CrossRef]
- Bezerra-Neto, J.F.; Pinto-Coelho, R.M. Diel vertical migration of the copepod thermocyclops inversus (kiefer, 1936) in a tropical reservoir: The role of oxygen and the spatial overlap with chaoborus. Aquat. Ecol. 2007, 41, 535–545. [Google Scholar] [CrossRef]
- Bianucci, L.; Fennel, K.; Denman, K.L. Role of sediment denitrification in water column oxygen dynamics: ComParison of the north american east and west coasts. Biogeosciences 2012, 9, 2673–2682. [Google Scholar] [CrossRef]
- Dalsgaard, T.; De Brabandere, L.; Hall, P.O.J. Denitrification in the water column of the central baltic sea. Geochim. Cosmochim. Acta 2013, 106, 247–260. [Google Scholar] [CrossRef]
- García-Moyano, A.; González-Toril, E.; Aguilera, Á.; Amils, R. Comparative microbial ecology study of the sediments and the water column of the río tinto, an extreme acidic environment. FEMS Microbiol. Ecol. 2012, 81, 303–314. [Google Scholar] [CrossRef] [PubMed]
- Gentz, T.; Damm, E.; Schneider von Deimling, J.; Mau, S.; McGinnis, D.F.; Schlüter, M. A water column study of methane around gas flares located at the west spitsbergen continental margin. Cont. Shelf Res. 2014, 72, 107–118. [Google Scholar] [CrossRef] [Green Version]
- González-DáVila, M.; Santana-Casiano, J.M.; Rueda, M.J.; Llinás, O. The water column distribution of carbonate system variables at the estoc site from 1995 to 2004. Biogeosciences 2010, 7, 3067–3081. [Google Scholar] [CrossRef]
- Matijević, S.; Kušpilić, G.; Morović, M.; Grbec, B.; Bogner, D.; Skejić, S.; Veža, J. Physical and chemical properties of the water column and sediments at sea bass/sea bream farm in the middle adriatic (Maslinova Bay). Acta Adriat. 2009, 50, 59–76. [Google Scholar]
- McDaniel, M.D.; David, M.B.; Royer, T.V. Relationships between benthic sediments and water column phosphorus in illinois streams. J. Environ. Qual. 2009, 38, 607–617. [Google Scholar] [CrossRef] [PubMed]
- Povinec, P.P.; Livingston, H.D.; Shima, S.; Aoyama, M.; Gastaud, J.; Goroncy, I.; Hirose, K.; Huynh-Ngoc, L.; Ikeuchi, Y.; Ito, T.; et al. Iaea’97 expedition to the nw pacific ocean—Results of oceanographic and radionuclide investigations of the water column. Deep Sea Res. II Top. Stud. Oceanogr. 2003, 50, 2607–2637. [Google Scholar] [CrossRef]
- Sauter, E.J.; Schlüter, M.; Wegner, J.; Labahn, E. A routine device for high resolution bottom water sampling. J. Sea Res. 2005, 54, 204–210. [Google Scholar] [CrossRef]
- Tesi, T.; Langone, L.; Goñi, M.A.; Turchetto, M.; Miserocchi, S.; Boldrin, A. Source and composition of organic matter in the bari canyon (Italy): Dense water cascading versus particulate export from the upper ocean. Deep Sea Res. I Oceanogr. Res. Pap. 2008, 55, 813–831. [Google Scholar] [CrossRef]
- Thomsen, L.; Graf, G.; Martens, V.; Steen, E. An instrument for sampling water from the benthic boundary layer. Cont. Shelf Res. 1994, 14, 871–882. [Google Scholar] [CrossRef]
- Asokan, T.; Seet, G.; Lau, M.; Low, E. Optimum positioning of an underwater intervention robot to maximise workspace manipulability. Mechatronics 2005, 15, 747–766. [Google Scholar] [CrossRef]
- Evans, M.E. A microstructure flux profiler control system design. IEEE Ocean. Eng. J. 1993, 18, 42–54. [Google Scholar] [CrossRef]
- Grimble, M.J.; van der Molen, G.M.; Liceaga-Castro, E. Submarine depth and pitch control. In Proceedings of the Second IEEE Conference on Control Applications, Vancouver, BC, Canada, 13–16 September 1993; Volume 952, pp. 953–958.
- Hayir, A. The effects of variable speeds of a submarine block slide on near-field tsunami amplitudes. Ocean Eng. 2003, 30, 2329–2342. [Google Scholar] [CrossRef]
- Kim, T.W.; Yuh, J. Development of a real-time control architecture for a semi-autonomous underwater vehicle for intervention missions. Control Eng. Pract. 2004, 12, 1521–1530. [Google Scholar] [CrossRef]
- McGookin, E.W.; Murray-Smith, D.J. Submarine manoeuvring controllers’ optimisation using simulated annealing and genetic algorithms. Control Eng. Pract. 2006, 14, 1–15. [Google Scholar] [CrossRef]
- Novick, D.K.; Pitzer, R.; Wilkers, B.; Crane, C.D., III; de la Iglesia, E.; Doty, K.L. The development of a highly maneuverable underwater vehicle. In Proceedings of the Robotics 98: The 3rd International Conference and Exposition/Demonstration on Robotics for Challenging Environments, Albuquerque, NM, USA, 26–30 April 1998; pp. 168–173.
- Wang, S. Motions of a spherical submarine in waves. Ocean Eng. 1986, 13, 249–271. [Google Scholar] [CrossRef]
- Ostrovskii, A.G.; Zatsepin, A.G.; Soloviev, V.A.; Tsibulsky, A.L.; Shvoev, D.A. Autonomous system for vertical profiling of the marine environment at a moored station. Oceanology 2013, 53, 233–242. [Google Scholar] [CrossRef]
- Doherty, K.W.; Frye, D.E.; Liberatore, S.P.; Toole, J.M. A moored profiling instrument*. J. Atmos. Ocean. Technol. 1999, 16, 1816–1829. [Google Scholar] [CrossRef]
- Langebrake, L.C.; Lembke, C.E.; Weisberg, R.H.; Byrne, R.H.; Russell, D.R.; Tilbury, G.; Carr, R. Design and initial results of a bottom stationing ocean profiler. In Proceedings of the OCEANS ’02 MTS/IEEE, Biloxi, MS, USA, 29–31 October 2002; Volume 101, pp. 98–103.
- Sanford, T.B.; Dunlap, J.H.; Carlson, J.A.; Webb, D.C.; Girton, J.B. Autonomous velocity and density profiler: EM-APEX. In Proceedings of the IEEE/OES Eighth Working Conference on Current Measurement Technology, Southampton, UK, 28–29 June 2005; pp. 152–156.
- Johnson, K.S.; Coletti, L.J.; Jannasch, H.W.; Sakamoto, C.M.; Swift, D.D.; Riser, S.C. Long-term nitrate measurements in the ocean using the in situ ultraviolet spectrophotometer: Sensor integration into the apex profiling float. J. Atmos. Ocean. Technol. 2013, 30, 1854–1866. [Google Scholar] [CrossRef]
- Akinfiev, T.; Fernández, R.; Armada, M. Dispositivo Para la Recolección de Muestras de Líquido y el Procedimiento Para su Control. ES 2380741-B1, 24 April 2013. [Google Scholar]
- Akinfiev, T.; Fernández, R.; Armada, M. Aparato Para la Toma de Muestras de Líquido y el Procedimiento Para su Control. ES 2380740-B1, 23 April 2013. [Google Scholar]

© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández, R.; Apalkov, A.; Armada, M. Novel Robotic Platforms for the Accurate Sampling and Monitoring of Water Columns. Sensors 2016, 16, 1378. https://doi.org/10.3390/s16091378
Fernández R, Apalkov A, Armada M. Novel Robotic Platforms for the Accurate Sampling and Monitoring of Water Columns. Sensors. 2016; 16(9):1378. https://doi.org/10.3390/s16091378
Chicago/Turabian StyleFernández, Roemi, Andrey Apalkov, and Manuel Armada. 2016. "Novel Robotic Platforms for the Accurate Sampling and Monitoring of Water Columns" Sensors 16, no. 9: 1378. https://doi.org/10.3390/s16091378