Current features can be generally divided into four categories: textural features, size features, contrast features and polarimetric features [
37]. Among these features, Lincoln Laboratory Discrimination Features and ERIM (Environmental Research Institure of Michigan) Discrimination Features are the most widely used [
38,
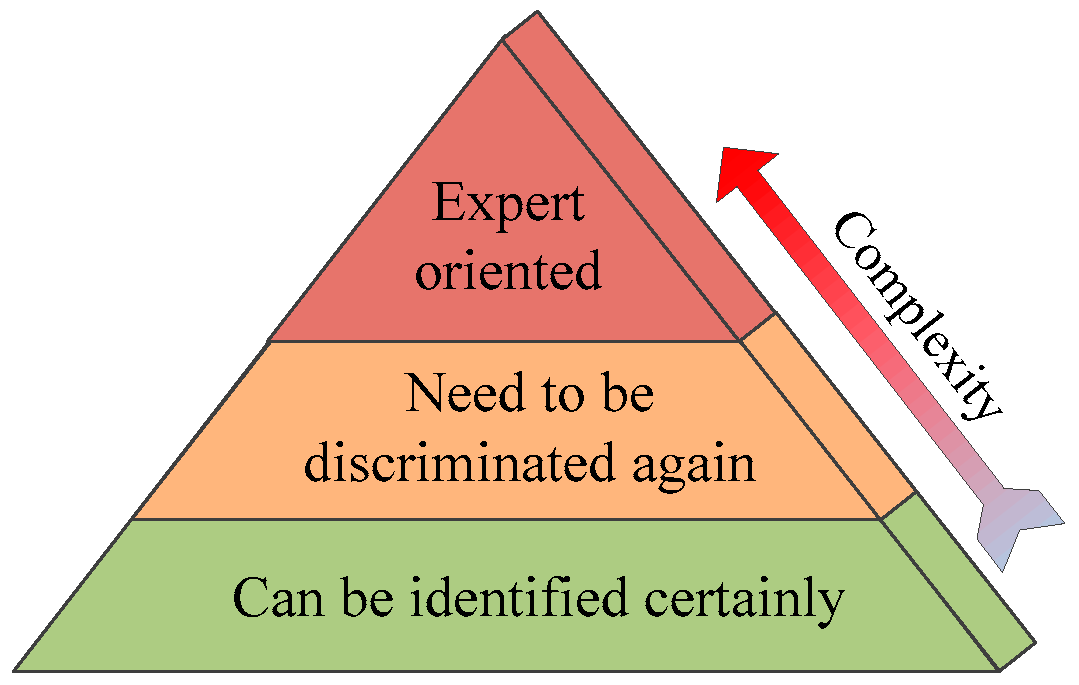
39]. In this paper, size features are considered to be more accurate to identify false alarms. Generally, size features can reject certain false alarms accurately. Thus we categorize discrimination based on features into certain discrimination and confidence discrimination based on features. The former refers to discrimination methods whose results are correct. In particular, it means that rejected targets are false alarms absolutely. The latter means that discrimination results may not be totally correct. Certain discrimination is applied to exclude certain false alarms firstly. Then confidence discrimination is applied and the confidence probability of each discrimination result is calculated.
3.1.1. Certain Discrimination Based on Features
Features used for CeD are usually size or shape features. Textural or contrast features may vary considerably in SAR images. Different from these features, size or shape features are more reliable in SAR images. They can be used to reject some false alarms certainly. Among them, length
, width
and aspect ratio
of ships are considered to be most intuitive. Thus, these three features are used for CeD. Usually, size and shape features are difficult to extract for ships that have problems with sidelobes. In this paper, a refined ship segmentation method [
40] developed by our research group is used to alleviate sidelobes’ effect. It is original from Radon transformation [
41] and improved 2D Otsu method [
42]. Then
and
are extracted from the segmentation result. Aspect ratio
is calculated by
and
.
Empirically, the length of ship targets is no longer than 300 m in most cases (Certain ships can be longer than 300 m, e.g., aircraft carriers, and this threshold can be adjusted according to users’ need), and the width is no longer than 60 m. However, both the measured length and width are usually larger than the real value because of sidelobes. Smearing or defocusing caused by the movement of ships also enlarges the length or width. Thus, the upper limit of or are set larger, 360 m and 80 m, respectively. If or is beyond the range, it may be not a ship. At the same time, because of designed requirements, the aspect ratio of ships is less than 10. As and are enlarged, the aspect ratio of ship targets in SAR images is usually smaller. We set the threshold of aspect ratio as 9 in this paper. If aspect ratio is larger than 9, the target is not considered to be a ship.
3.1.2. Confidence Discrimination Based on Features
During CeD, some ship candidates are discarded as they are considered to be false alarms with high degree of certainty. However, the remaining detection results can still contain false alarms. Supervised learning methods such as QD (Quadratic Distance), SVM (Support Vector Machine), BNN (Bayesian Neural Network) and QPD (Quadratic Polynomial Distance) [
43,
44,
45] usually include two steps: training and testing. However, they are not easy for ship discrimination because training and testing data can be collected under different background, by different sensors, in different weather conditions. The training requires enough representative data. However, it is not a tractable work usually.
After visualizing the samples collected from SAR images, it is found that ship targets will group together and clutters will scatter and far away from targets in the feature space. It is more suitable to use a clustering method as K-means to divide the candidates into target and clutter groups. Thus, we can use the rules inside the candidates instead of learning it from other candidates to distinguish between target and clutter. In this paper, the K-means discrimination method proposed in [
46] is modified to apply confidence discrimination.
In this paper, the three discrimination features used are standard deviation, peak power and average power of target areas.
The standard deviation
is defined as follows:
where
N is the number of pixels in the chip, “chip” means the whole chip. Usually, there are large fluctuations in a chip containing ship targets. As a result, the standard deviation of a chip containing ship targets is much larger than clutter chips. The use of single size chips can bias the standard deviation. Candidate ships with different dimensions will have different standard deviations, all other things (including chip size) being equal. This bias has been calibrated in this paper.
The average power of target areas
is defined as follows:
where
N is the number of pixels in the target blob, target blob is the result after an AND operation of the original chip and the binary chip achieved by the refined ship segmentation method [
40]. This feature is discriminative due to that it is uncorrelated to size of targets. For target chip,
Apt is much larger than that of clutter chips.
The peak power of target areas
is defined as follows:
Its reason to be discriminate is similar to .
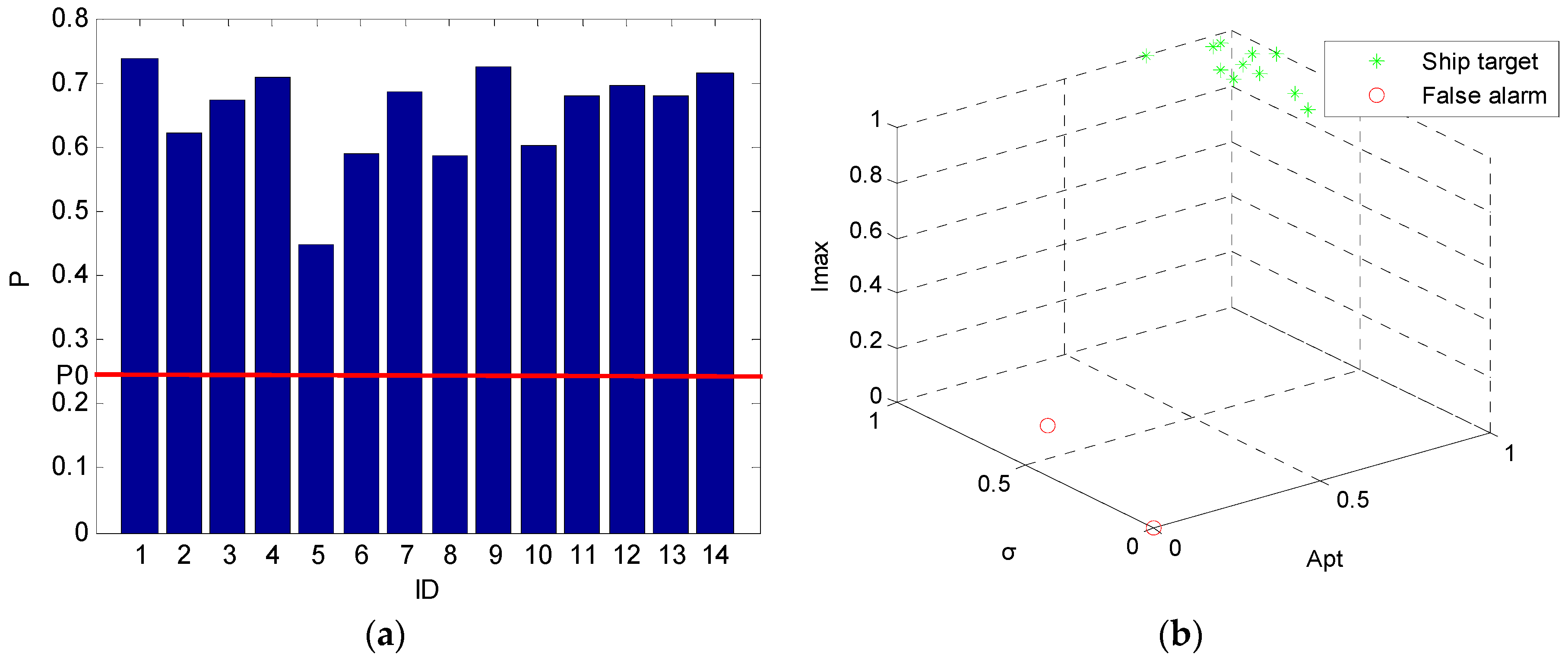
To use K-means discrimination method, features should be normalized into interval [0, 1] firstly to eliminate difference between dimensions. Each feature is divided by the maximum without any transformation. Ideally, target group will gather around [1, 1, 1] while clutters group around [0, 0, 0] in the feature space after normalization. The number of clusters is set to be 2. Their initial centers are predefined as [1, 1, 1] and [0, 0, 0], respectively. Thus, the target points will be the first cluster while clutter points will be the second one as we hope.
A problem for K-means discrimination method is that results are not always that correct because of variety of clutters and ship targets. It is distinguished to the certain discrimination method. Besides, wrong discrimination results are difficult to be identified. We do not know which discrimination result is more reliable. Further discrimination based on the results is difficult to start with. Thus, it is essential to design a strategy to estimate the confidence level of each discrimination result in which the most unreliable results are identified.
To cure the above problems, we propose a confidence method to identify wrong discrimination results. After K-means clustering, we calculate the difference
between distances from each feature point
to the 2 final cluster centers
and
,
. Obviously, the maximum value of
is the diagonal length
of the feature space. If the dimension is
and features are normalized into interval [0, 1], then
. The confidence probability is defined as follows in this paper,
With
increasing,
is larger, which means that the discrimination result is more reliable; on the contrary,
is smaller which means that tiny noise can lead to different discrimination results and the discrimination result can be unstable and unreliable. We set a threshold
. If
, the discrimination result is considered to be doubtful and need to be discriminated again,
that is to say, any target which matches
need to be discriminated again; otherwise, the
discrimination result is considered to be correct. Actually, the decision plane is a hyperboloid whose focus are final cluster centers
and
, distance difference is
. Obviously, the CeD method proposed in this paper is able to provide a quantitative estimation for the confidence level of each result. Doubtful results can be identified easily. Usually, they will be checked by eye inspection as its number is small. The results from eye inspection are considered to be correct and their confidence probabilities are 1.
Another problem for K-means discrimination method is that if only one class of candidates is present (i.e., only real ships or only false alarms), it should not be applied. Otherwise, some real ships may be incorrectly classified as false alarms (or vice versa) by the K-means algorithm. Considering that if the number of candidate chips is small, the probability of only one class is high. Otherwise, the probability of only one class is low. Thus, only when the number of candidate chips is large enough, CoD is applied. Otherwise, CoD will be skipped and all candidate chips will be checked by eye inspection.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}