In this section, we introduce an event-triggered decentralized adaptive control architecture, where it is assumed that physically-interconnected modules cannot communicate with each other. For organizational purposes, this section is broken up into two subsections. Specifically, we first briefly overview a standard decentralized adaptive control architecture without event-triggering and then present the proposed event-triggered decentralized adaptive control approach, which includes rigorous stability and performance analyses with no Zeno behavior and generalizations to the state emulator case for suppressing the effect of possible high-frequency oscillations in the controller response.
2.1. Overview of a Standard Decentralized Adaptive Control Architecture without Event-Triggering
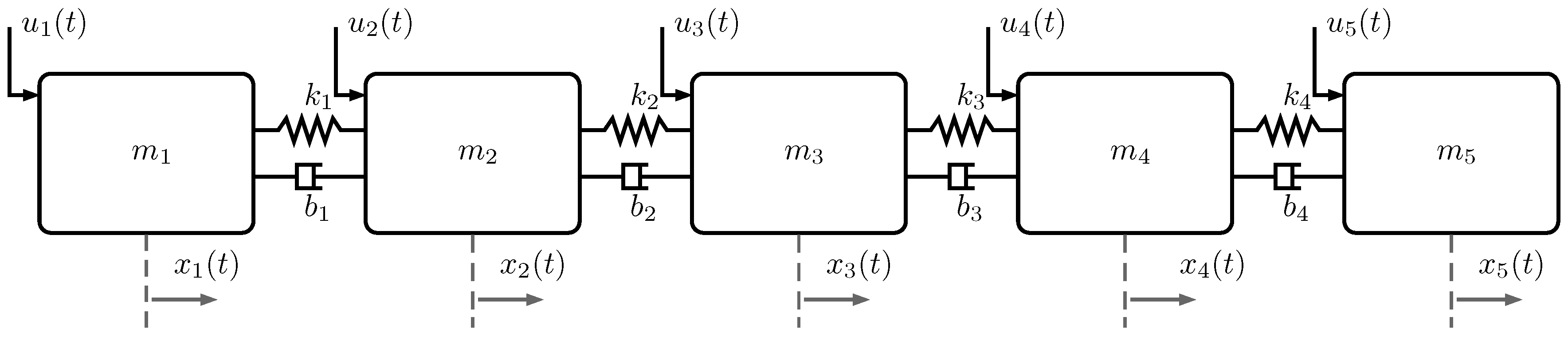
Consider an uncertain large-scale modular system
consisting of
N interconnected modules
,
, given by:
where
is the state of
,
is the control input applied to
,
,
are known matrices and the pair
is controllable. In addition,
is an unknown module control effectiveness matrix;
represents matched module bounded uncertainties; and
represents matched unknown physical interconnections with respect to module
j,
, such that
.
Assumption 1. The unknown module uncertainty is parameterized as:
where is an unknown weight matrix, which satisfies , , and is a known Lipschitz continuous basis function vector satisfying:with . Assumption 2. The function in Equation (2) satisfies: Next, consider the reference model
capturing a desired closed-loop performance for module
i,
given by:
where
is the reference state vector of
,
is a given bounded command of
,
is the reference system matrix and
is the command input matrix.
Assumption 3. There exist and , such that and hold with being Hurwitz.
Using Assumptions 1 and 3, Equation (
2) can be equivalently written as:
where
is the unknown weight matrix and
. Motivated from the structure of the uncertain terms appearing in Equation (
7), let the decentralized adaptive feedback controller of
, be given by:
where
is an estimate of
satisfying the update law:
where
denotes the projection operator defined for matrices [
10,
35,
44,
45],
being the learning rate and
being a solution of the Lyapunov equation:
with
. Now, letting:
and using Equations (
6) and (
7), the module-level closed-loop error dynamics are given by:
2.2. Proposed Event-Triggered Decentralized Adaptive Control Architecture
We now present the proposed event-triggered decentralized adaptive control architecture for large-scale modular systems, which reduces wireless network utilization and allows a desirable command tracking performance during the two-way data exchange between the module
,
, and its local controller
, over a wireless network. For this objective, we utilize event-triggering control theory to schedule the data exchange dependent on errors exceeding user-defined thresholds. Specifically, the module sends its state signal to its local adaptive controller only when a predefined event occurs. The
-th time instants of the state transmission of the module are represented by the monotonic sequence
, where
. The local controller uses this triggered module state signal to compute the control signal using adaptive control architecture. In addition, the local controller sends the updated feedback control input to the module only when another predefined event occurs. The
-th time instants of the feedback control transmission are then represented by the monotonic sequence
, where
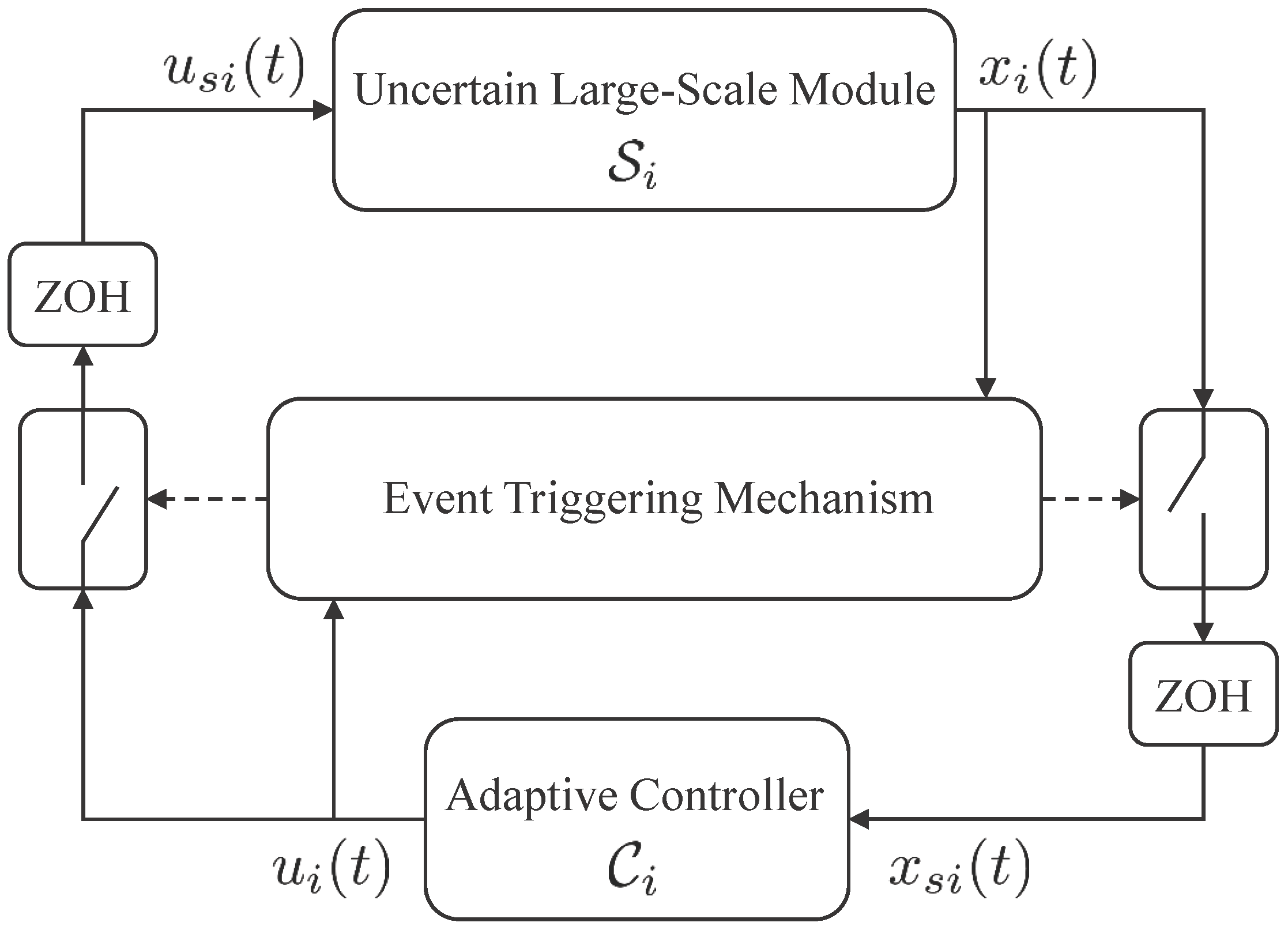
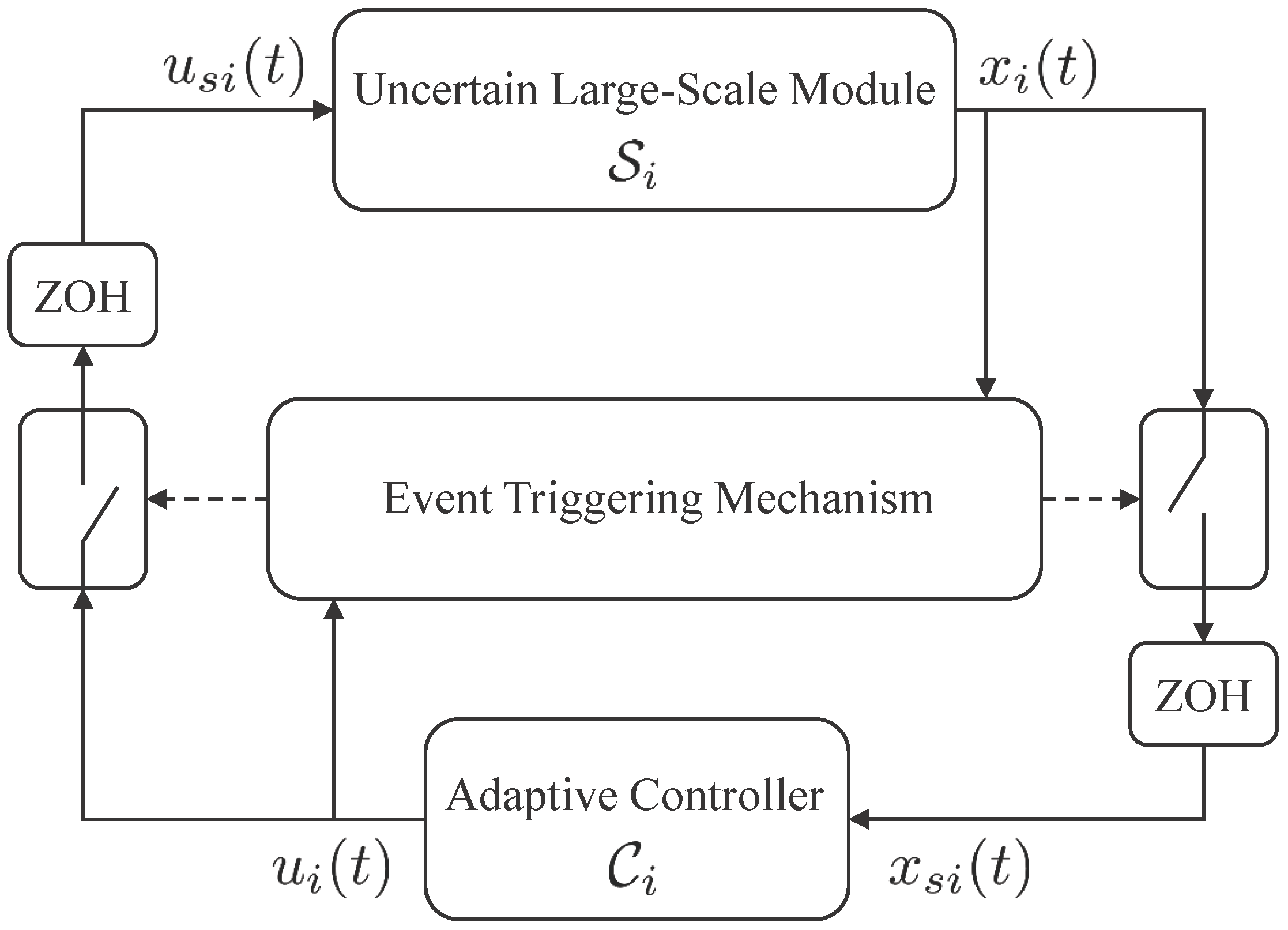
. As depicted in
Figure 1, each module state signal and its local control input are held by a zero-order-hold operator (ZOH) until the next triggering event for the corresponding signal takes place. The delay in sampling, data transmission and computation is not considered in this paper. Consider the uncertain dynamical module
i given by:
where
is the sampled control input vector. Using Assumptions 1 and 3, Equation (
14) can be equivalently written as:
where
is the sampled state vector,
. Now, let the adaptive feedback control law be given by:
where
, and
satisfies the weight update law:
with
being the error of the triggered module state vector. Note that using Equation (
16), Equation (
15) can be rewritten as:
where
, and using Equations (
18) and (
6), we can write the module error dynamics as:
The proposed event-triggered decentralized adaptive control algorithm is based on the two-way data exchange structure depicted in
Figure 1, where the local controller generates
and the uncertain dynamical module is driven by the sampled version of its local control signal
depending on an event-triggering mechanism. Similarly, the local controller utilizes
that represents the sampled version of the uncertain dynamical module state
depending on an event-triggering mechanism. For this purpose, let
be a given, user-defined sensing threshold to allow for data transmission from the uncertain dynamical system to the controller. In addition, let
be a given, user-defined actuation threshold to allow for data transmission from the local controller to the uncertain dynamical module. Similar in fashion to [
33,
35], we now define three logic rules for scheduling the two-way data exchange:
Specifically, when the inequality in Equation (
20) is violated at the
moment of the
-th time instant, the uncertain module triggers the measured state signal information, such that
is sent to its local controller. Likewise, when Equation (21) is violated or the local controller receives a new transmitted module state from the uncertain dynamical system (i.e., when
is true), then the local controller sends a new control input
to the uncertain dynamical module at the
moment of the
-th time instant.
We now analyze the system stability and performance of the proposed event-triggered decentralized adaptive control algorithm introduced in this section using the error dynamics given by Equation (
19), as well as the data exchange rules
,
, and
respectively given by Equations (
20)–(
22). For organizational purposes, the rest of this section, is divided into four subsections. Specifically, we analyze the uniform ultimate boundedness of the resulting closed-loop dynamical system in
Section 2.2.1, compute the ultimate bound and highlight the effect of user-defined thresholds and the adaptive controller design parameters on this ultimate bound in
Section 2.2.2, show that the proposed architecture does not yield to a Zeno behavior in
Section 2.2.3 and generalize the decentralized event-triggered adaptive control algorithm using a state emulator-based framework in
Section 2.2.4.
2.2.1. Stability Analysis and Uniform Ultimate Boundedness
We now present the first result of this paper, where the following assumption is needed.
Assumption 4. is positive by suitable selection of the design parameters.
Theorem 1. Consider the uncertain large-scale modular system consisting of N interconnected modules described by Equation (14) subject to Assumptions 1–4. Consider, in addition, the reference model given by Equation (6), and the module feedback control law given by Equations (16) and (17). Moreover, let the data transmission from the uncertain dynamical module to the local controller occur when is true and the data transmission from the controller to the uncertain dynamical system occur when is true. Then, the closed-loop solution is uniformly ultimately bounded for all . Proof. Since the data transmission from the uncertain modules to their local controllers and from the local controllers to the uncertain modules occur when
and
are true, respectively, note that
and
hold. Consider now the Lyapunov-like function given by:
Note that
and
for all
. The time-derivative of Equation (
23) is given by:
It follows from Assumption 1 that an upper bound for
in Equation (
24) can be given by:
where
. In addition, one can compute an upper bound for
in Equation (
24) as:
where
. Then, using the bounds given by Equations (
25) and (
26) in Equation (
24), one can write:
where
,
+ 2
and
with
due to utilizing the projection operator in the weight update law given by Equation (
9).
Since
with
, it follows from Assumption 2 that:
Furthermore, using Equation (
28) in the last term of Equation (
27) results in:
where Young’s inequality [
46] is considered in the scalar form of
, where
and
, and applied to terms
and
with
. Hence, Equation (
27) becomes:
where
.
Introducing:
for the uncertain system
results in:
where
is defined in Assumption 4. Letting
,
,
and
, Equation (
32) can equivalently be written as:
When
, this renders
, where
. Hence,
and
are uniformly ultimate bounded for all
. ☐
2.2.2. Computation of the Ultimate Bound for System Performance Assessment
For revealing the effect of user-defined thresholds and the event-triggered feedback adaptive controller design parameters to the system performance, the next corollary presents a computation of the ultimate bound for the system . For this purpose, we define the following, , , , , .
Corollary 1. Consider the uncertain dynamical system consisting of N interconnected modules described by Equation (14) subject to Assumptions 1–4. Consider, in addition, the reference model given by Equation (6), and the module feedback control law given by Equations (16) and (17). Moreover, let the data transmission from the uncertain modules to their local controllers occur when is true and the data transmission from the controllers to the uncertain modules occur when is true. Then, the ultimate bound of the system error between the uncertain dynamical system and the reference model is given by:where: Proof. It follows from the proof of Theorem 1 that
outside the compact set given by:
That is, since
cannot grow outside
, the evolution of
is upper bounded by:
It follows from
that
, and Equation (
34) is immediate. ☐
2.2.3. Computation of the Event-Triggered Inter-Sample Time Lower Bound
We now show that the proposed event-triggered decentralized adaptive control architecture does not yield to a Zeno behavior, which implies that it does not require a continuous two-way data exchange and reduces wireless network utilization. For the following corollary presenting the result of this subsection, we consider to be the -th time instant when is violated over , and since is a subsequence of , it follows that , where is the number of violation times of over .
Corollary 2. Consider the uncertain dynamical system consisting of N interconnected modules described by Equation (14) subject to Assumptions 1–4. Consider, in addition, the reference model given by Equation (6), and the module feedback control law given by Equations (16) and (17). Moreover, let the data transmission from the uncertain dynamical module to the local controller occur when is true and the data transmission from the controller to the uncertain dynamical system occur when is true. Then, there exist positive scalars and such that: Proof. The time derivative of
over
,
, is given by:
Since the closed-loop dynamical system is uniformly ultimately bounded by Theorem 1, there exists an upper bound to Equation (
40). Letting
denote this upper bound and with the initial condition satisfying
, it follows from Equation (
40) that:
Therefore, when
is true, then
, and it then follows from Equation (
41) that
.
Similarly, the time derivative of
over
, is given by:
Once again, since the closed-loop dynamical system is uniformly ultimately bounded by Theorem 1, there exists an upper bound to Equation (
42). Letting
denote this upper bound, and with the initial condition satisfying
, it follows from Equation (
42) that:
Therefore, when
is true, then
, and it then follows from Equation (
43) that
. ☐
Corollary 2 shows that the inter-sample times for the module state vector and decentralized feedback control vector are bounded away from zero, and hence, the proposed event-triggered adaptive control approach does not yield to a Zeno behavior. As discussed earlier, this implies that the proposed event-triggered decentralized adaptive control methodology does not require a continuous two-way data exchange, and it reduces wireless network utilization.
2.2.4. Generalizations to the Event-Triggered Decentralized Adaptive Control with State Emulator
We now generalize our framework to a state emulator-based design, since this framework has the capability to suppress possible high-frequency oscillation in the control signal of the uncertain module
[
10,
13,
37,
38,
39,
40,
41,
42]. Consider the (modified) reference system, so-called the state emulator of
, given by:
where
is the state emulator gain. Letting
, the reference model error dynamics capturing the difference between the ideal reference model in Equation (
6) and the state emulator-based (modified) reference model in Equation (
44) is given by:
In addition, letting
to denote the system state error vector, the (state emulator-based) system error dynamics follows from Equations (
18) and (
44) as:
where
is Hurwitz by a suitable selection of the state emulator gain
(e.g.,
is Hurwitz with
,
, since
is Hurwitz). To maintain system stability, we utilize the adaptive controller given by Equation (
16) with the update law described by:
where
is the unique solution of the algebraic Riccati equation:
with
and
.
Note from [
10,
42] that the state emulator-based adaptive control framework achieves stringent transient and steady-state system performance specifications by judiciously choosing the learning rate
and the state emulator gain
without causing high-frequency oscillations in the controller response, unlike standard model reference adaptive controllers overviewed earlier in this section. We also note that if one selects
, then the results of this paper hold for standard model reference adaptive controllers, and hence, there is no loss in generality in using a state emulator-based adaptive control framework for the main results of this paper.
Consider a parameter-dependent Riccati equation [
23,
47] given by:
where
is a unique solution with
and
.
Remark 1 [23]. Let define the largest set within which there is a positive-definite solution for . Since for and depends continuously on , the existence of for is assured.
The next lemma shows that for
, Equations (
49) and (50) can reliably be solved for
using the Potter approach given in [
48]. This also implies that
can be determined by searching for the boundary value,
. We employ notation
and
as defined in [
48].
Lemma 1 [23,48]. Let satisfy the parameter dependent Riccati equation given by Equations (49) and (50), and let the modified Hamiltonian be given by:Then, for all , and . Assumption 5. and , , are positive by suitable selection of the design parameters.
Corollary 3. Consider the uncertain dynamical system consisting of N interconnected modules described by Equation (14) subject to Assumptions 1–3 and 5. Consider in addition, the ideal reference model given by Equation (6), the state emulator given by Equation (44) and the module feedback control law given by Equations (16) and (47). Moreover, let the data transmission from the uncertain dynamical module to the local controller occur when is true and the data transmission from the controller to the uncertain dynamical system occur when is true. Then, the closed-loop solution is uniformly ultimately bounded for all . Proof. Consider the Lyapunov-like function given by:
where
and
satisfies the parameter dependent Riccati equation in Equations (
49) and (50). Note that
and
for all
. The time-derivative of Equation (
52) is given by:
Young’s inequality [
46] applied to the last term in Equation (
53) produces:
Using Equation (
54) in Equation (
53) yields:
Using Equations (
25) and (
26), Equation (
55) can be written:
where
,
,
and
.
Since
, it follows from Assumption 2 that:
Furthermore, using Equation (
57) in the last term of Equation (
56) results in:
where Young’s inequality [
46] is considered in the scalar form of
, with
and
, and applied to terms
,
and
with
. Hence, Equation (
56) becomes:
where
. Introducing:
for the uncertain system
results in:
where
and
are defined in Assumption 5. Letting
,
,
,
,
,
and
, then Equation (
61) can equivalently be written as:
Either
or
renders
, where
and
, and hence,
,
and
are uniformly ultimate bounded for all
. ☐
Corollary 4. Under the conditions of Corollary 3, we can show that is bounded for all .
Proof. It readily follows from:
and Corollary 3 that
is bounded for all
. ☐
Remark 2. In order to obtain the closed-loop system error ultimate bound value for Equation (63) and the no Zeno behavior characterization, we can follow the same steps highlighted in Corollaries 1 and 2, respectively. 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}