
Baseline Signal Reconstruction for Temperature Compensation in Lamb Wave-Based Damage Detection

Abstract
:1. Introduction
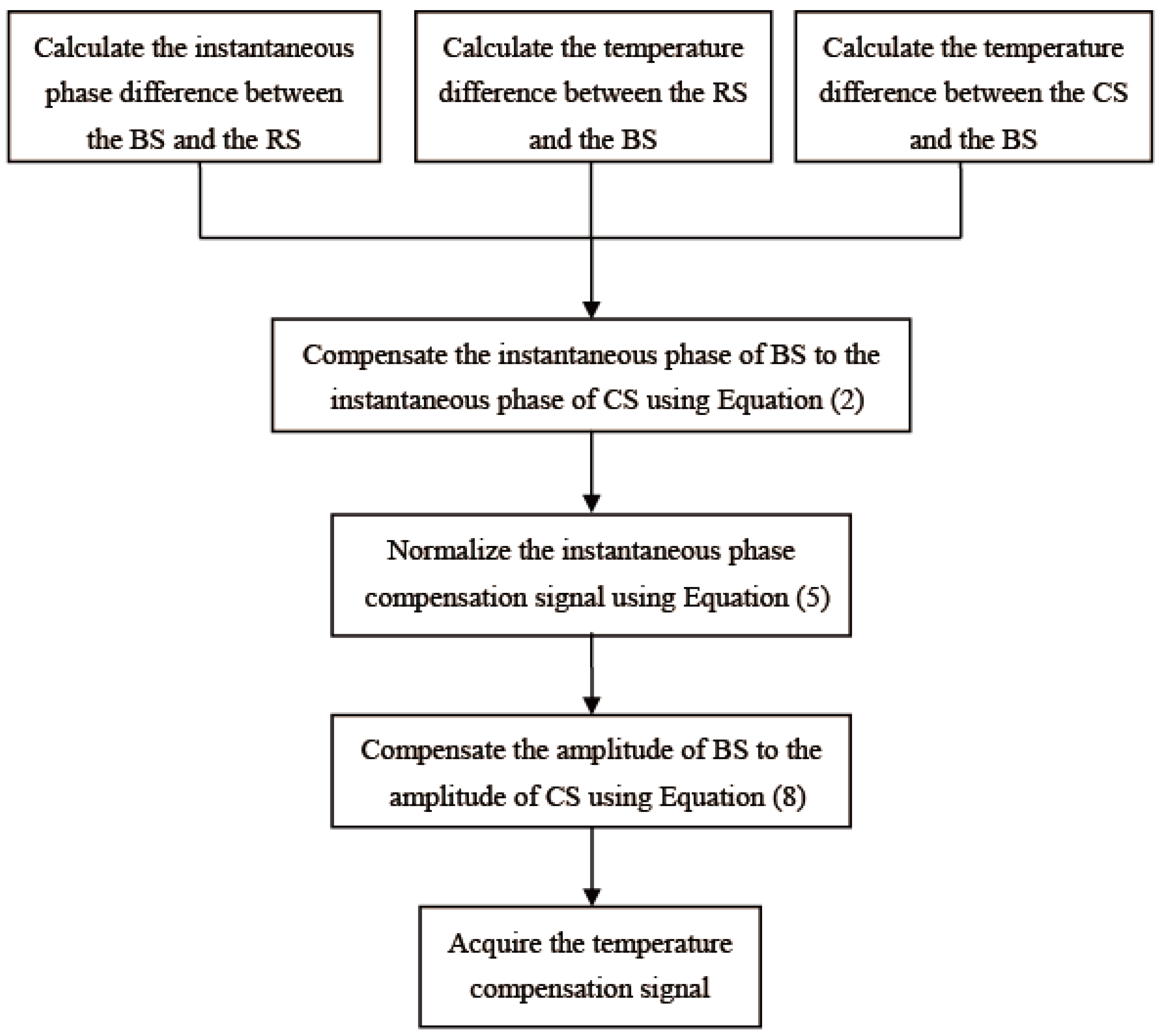
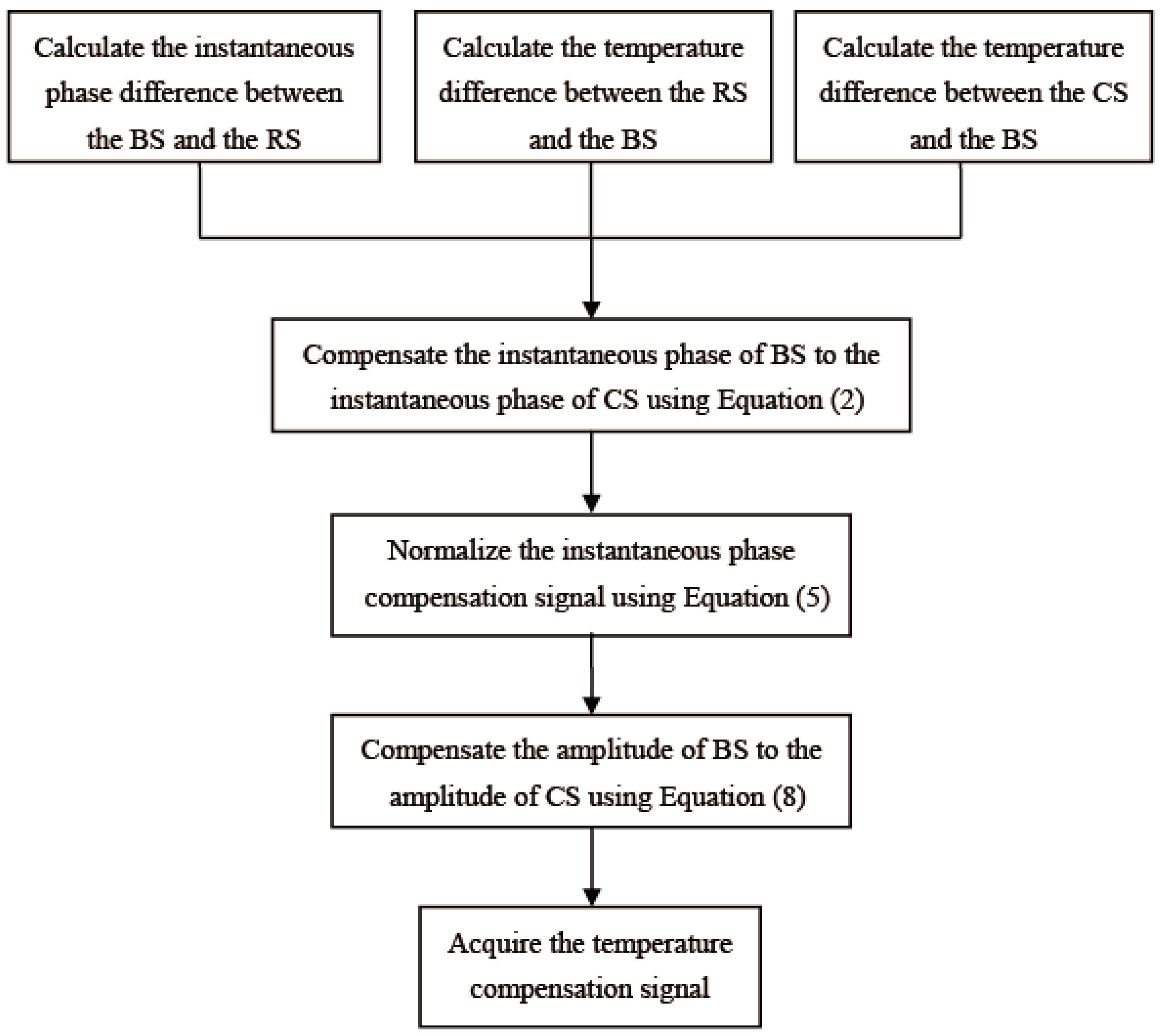
2. Temperature Compensation Method
3. Temperature Compensation Validation without Damage
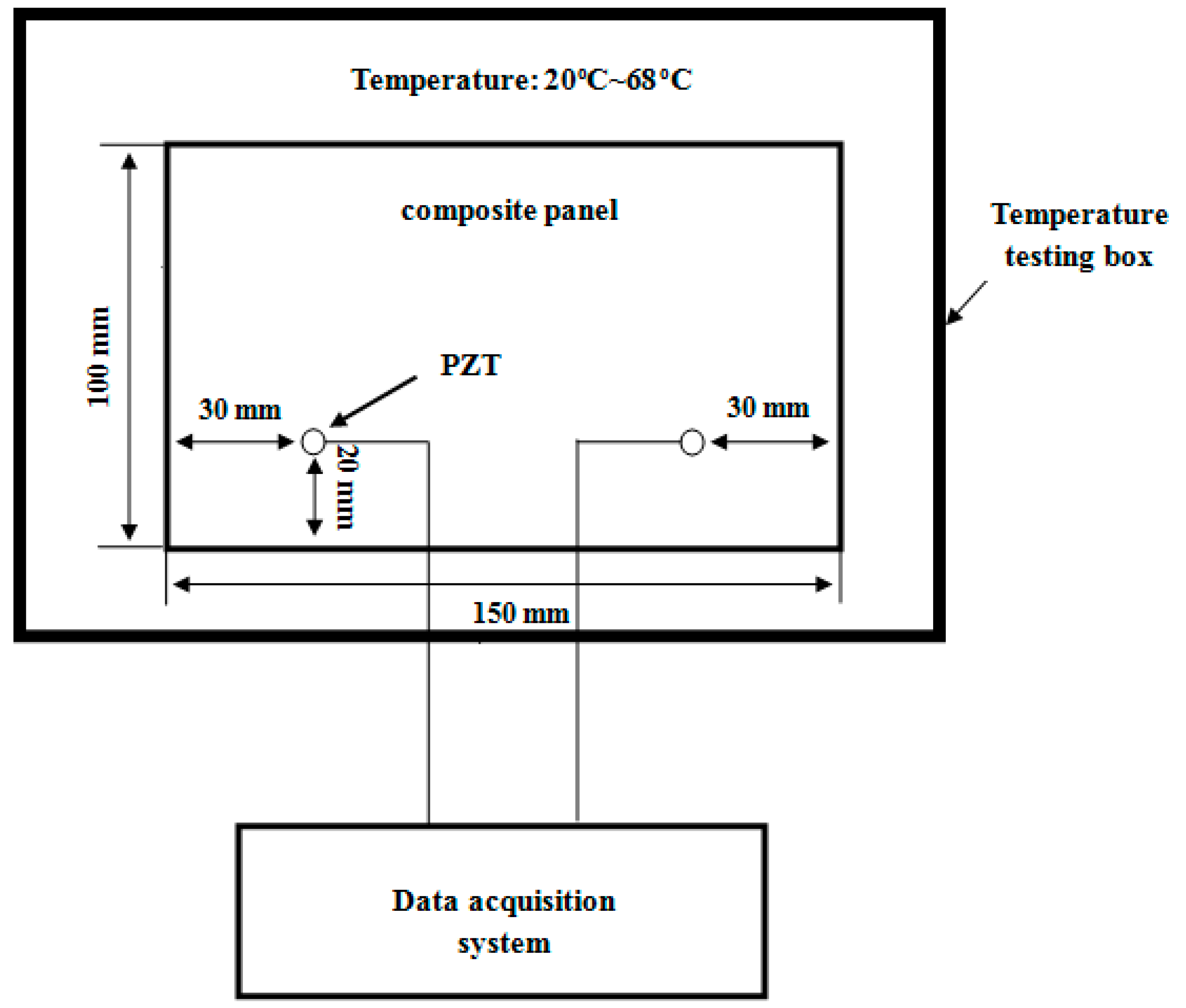
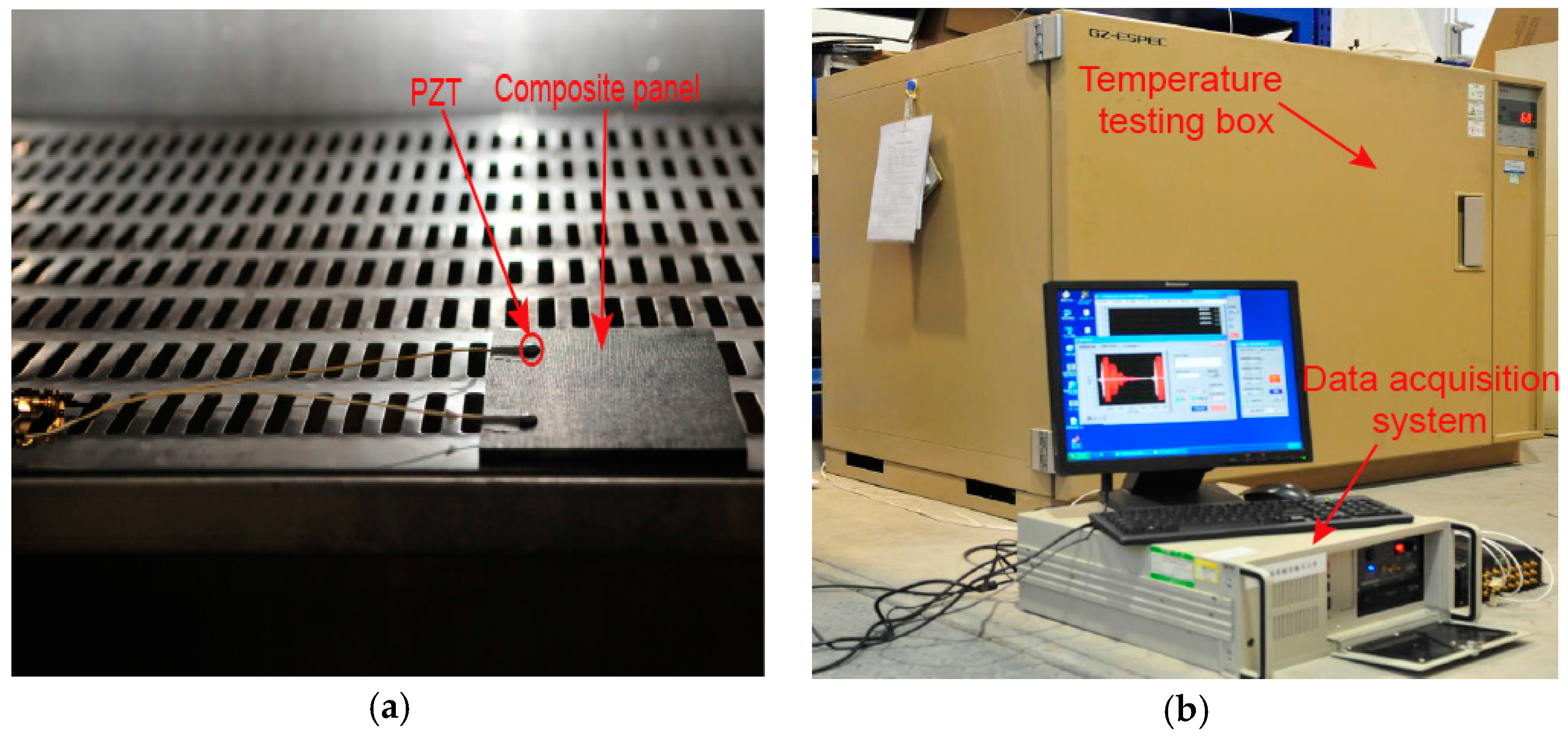
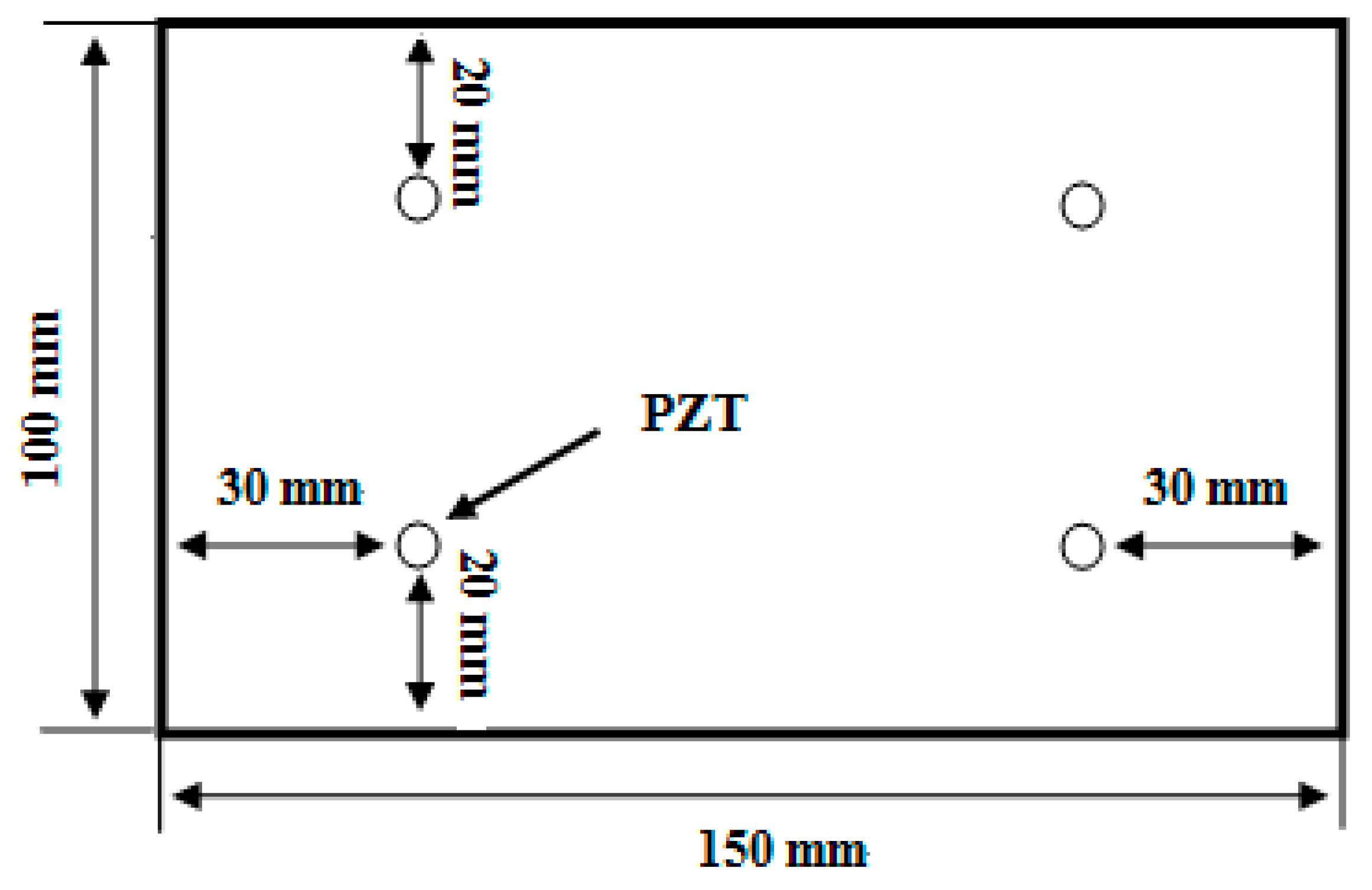
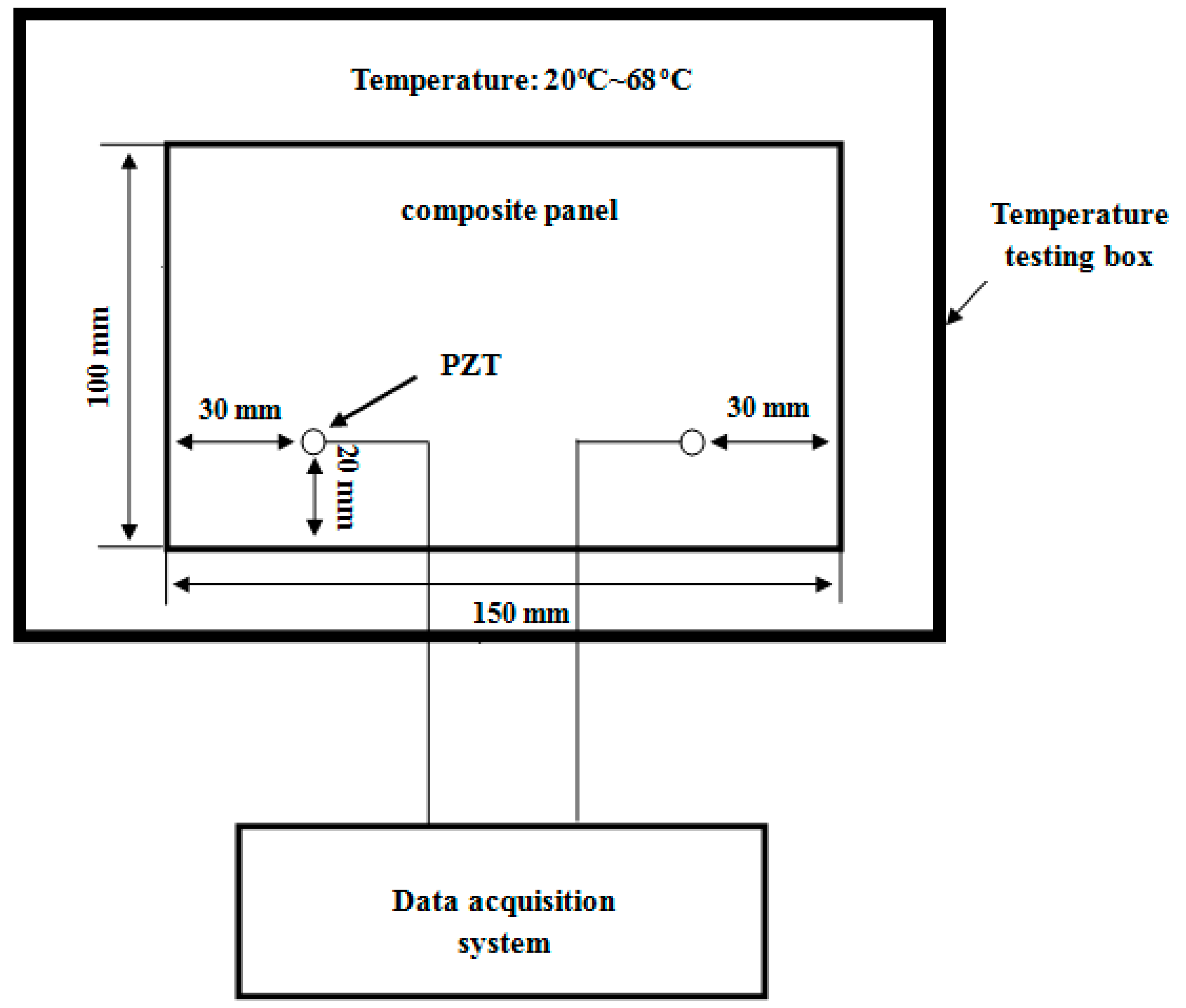
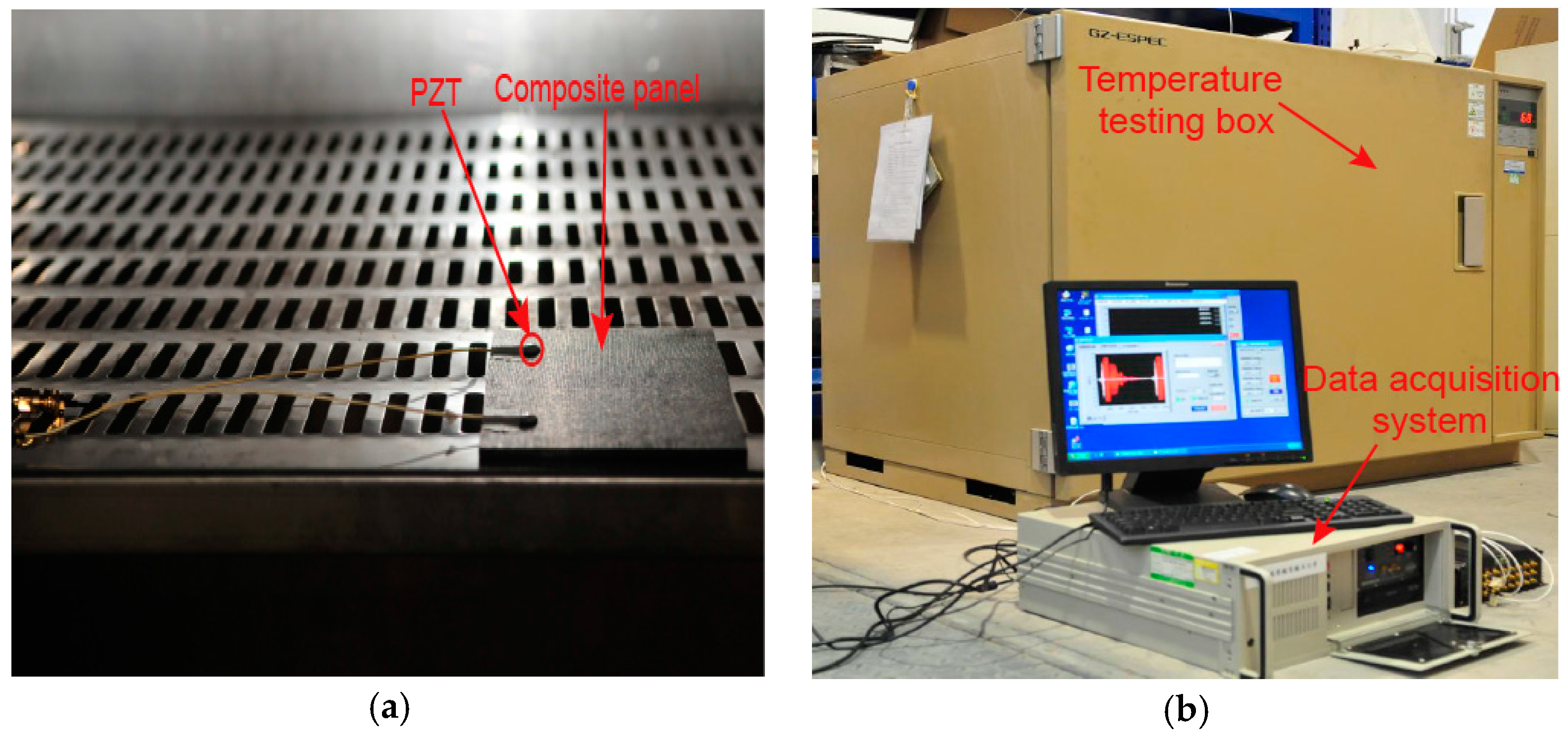
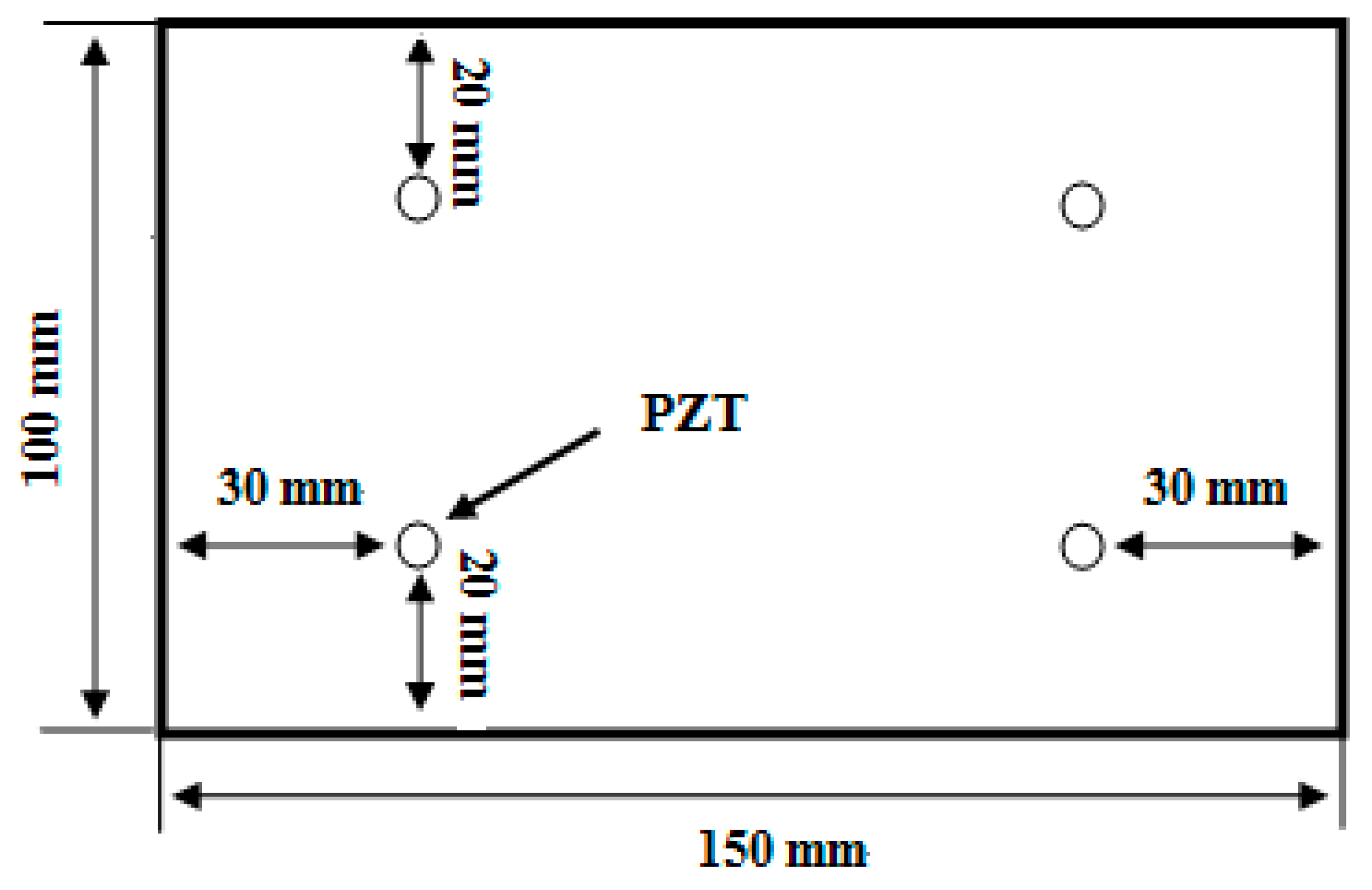
3.1. Experimental Setup and Procedure
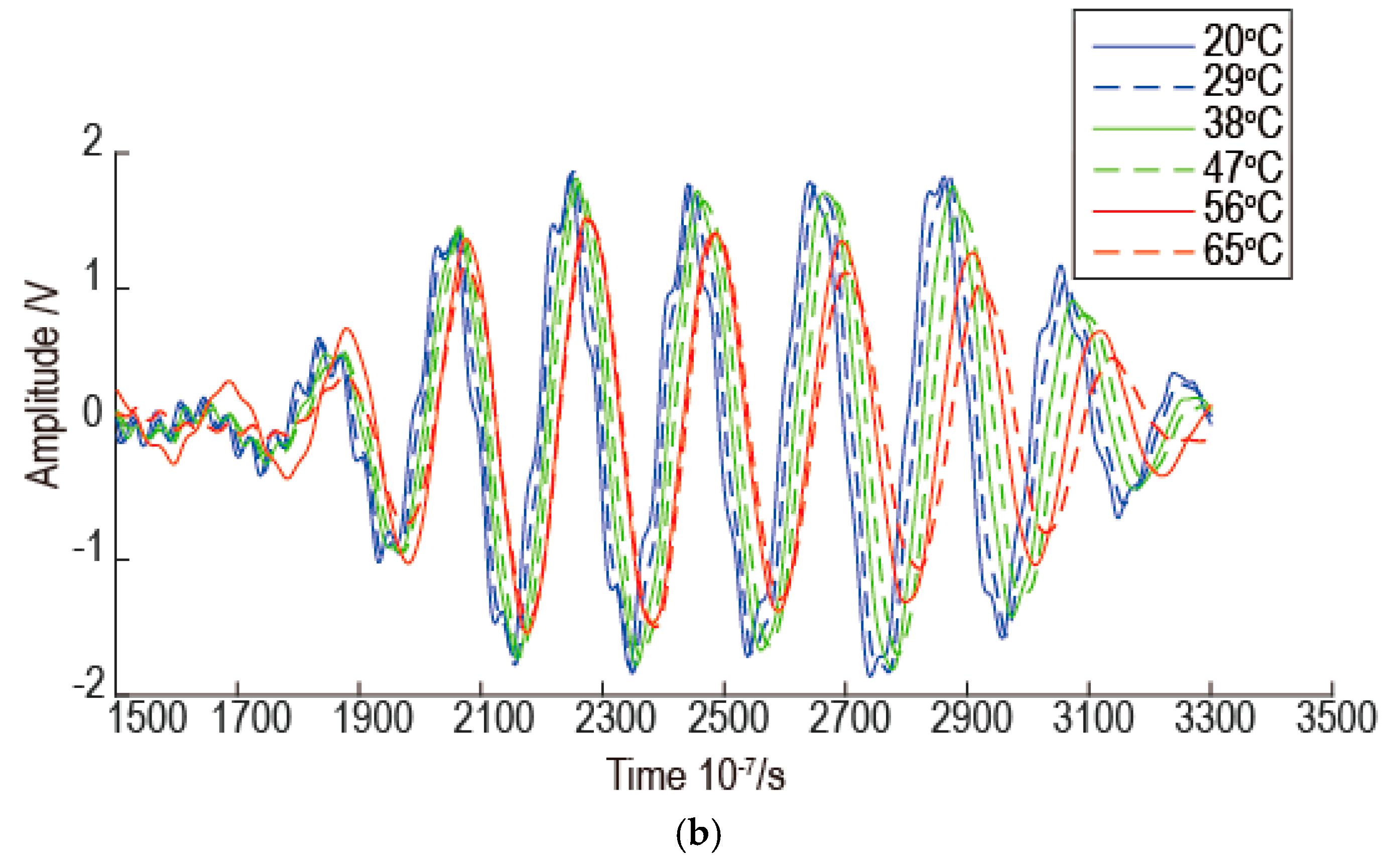
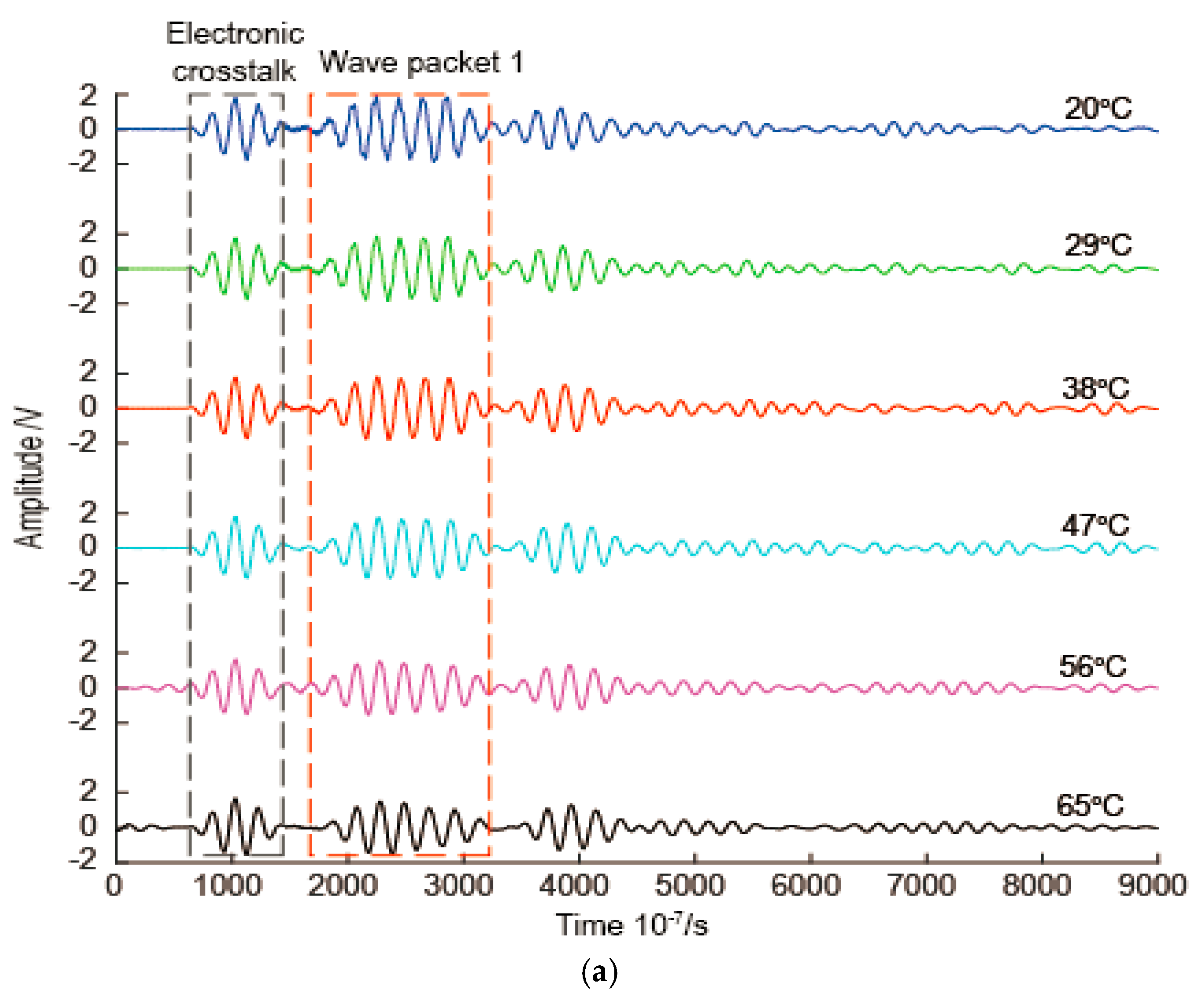
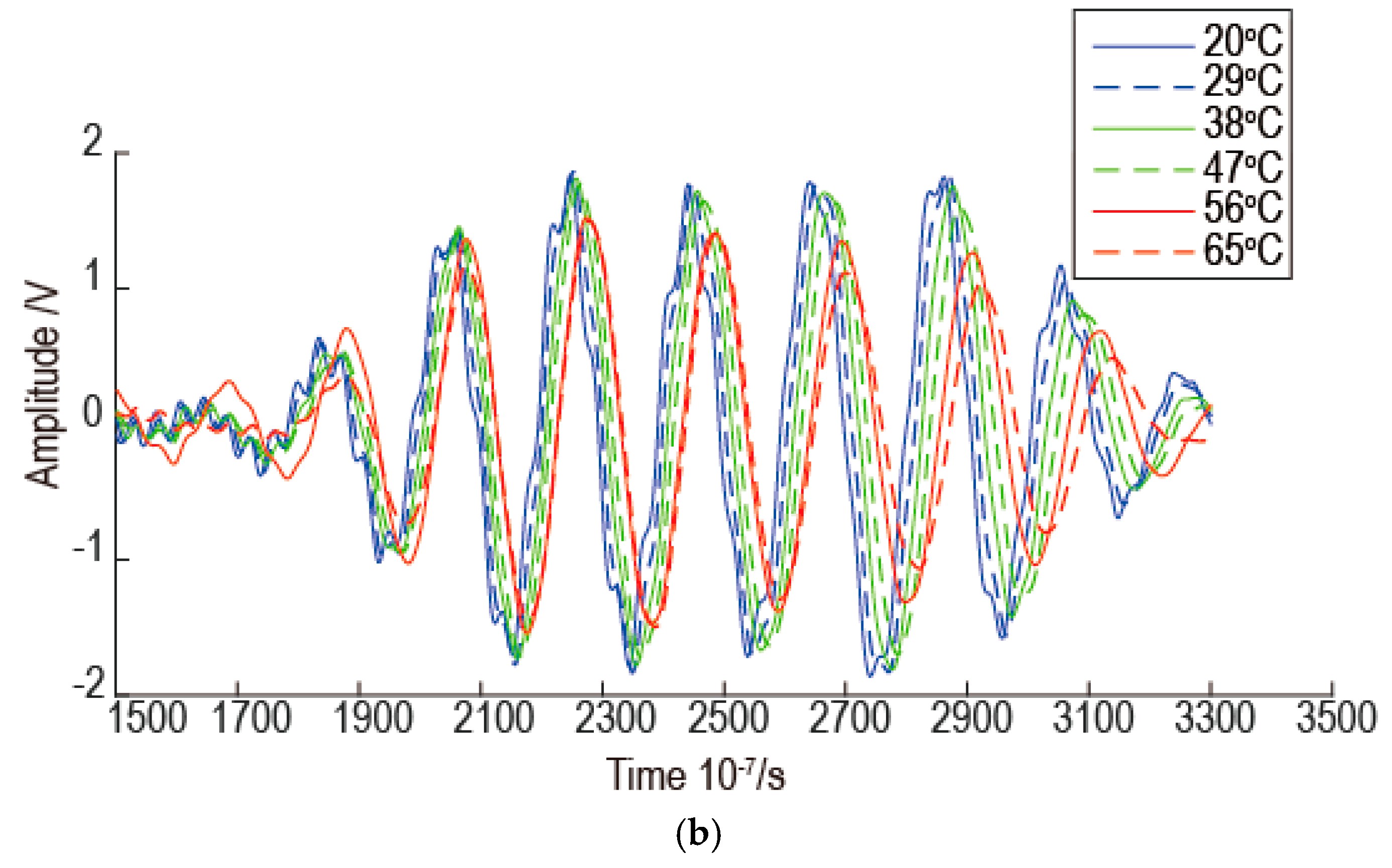
3.2. Results and Discussion
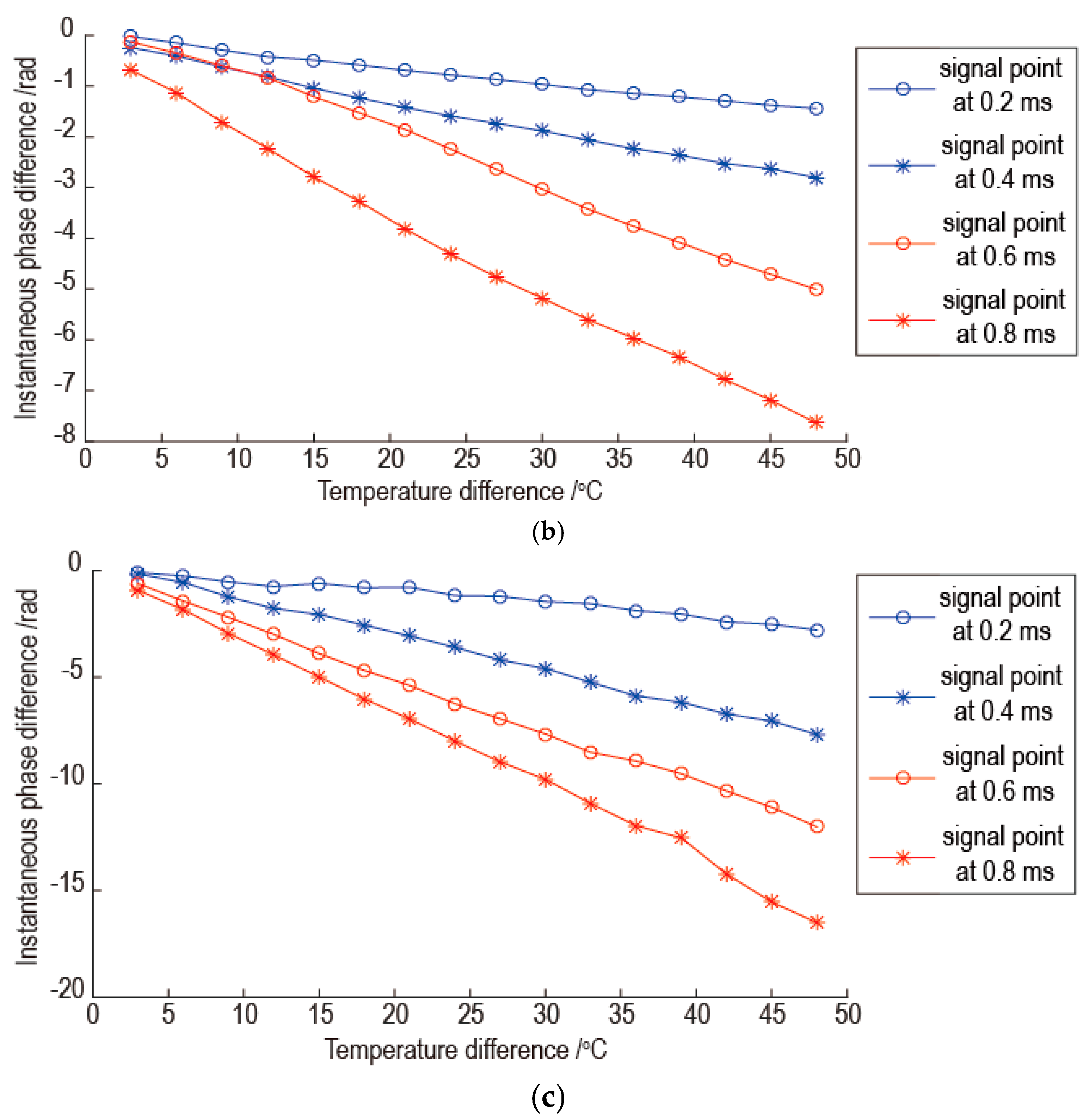
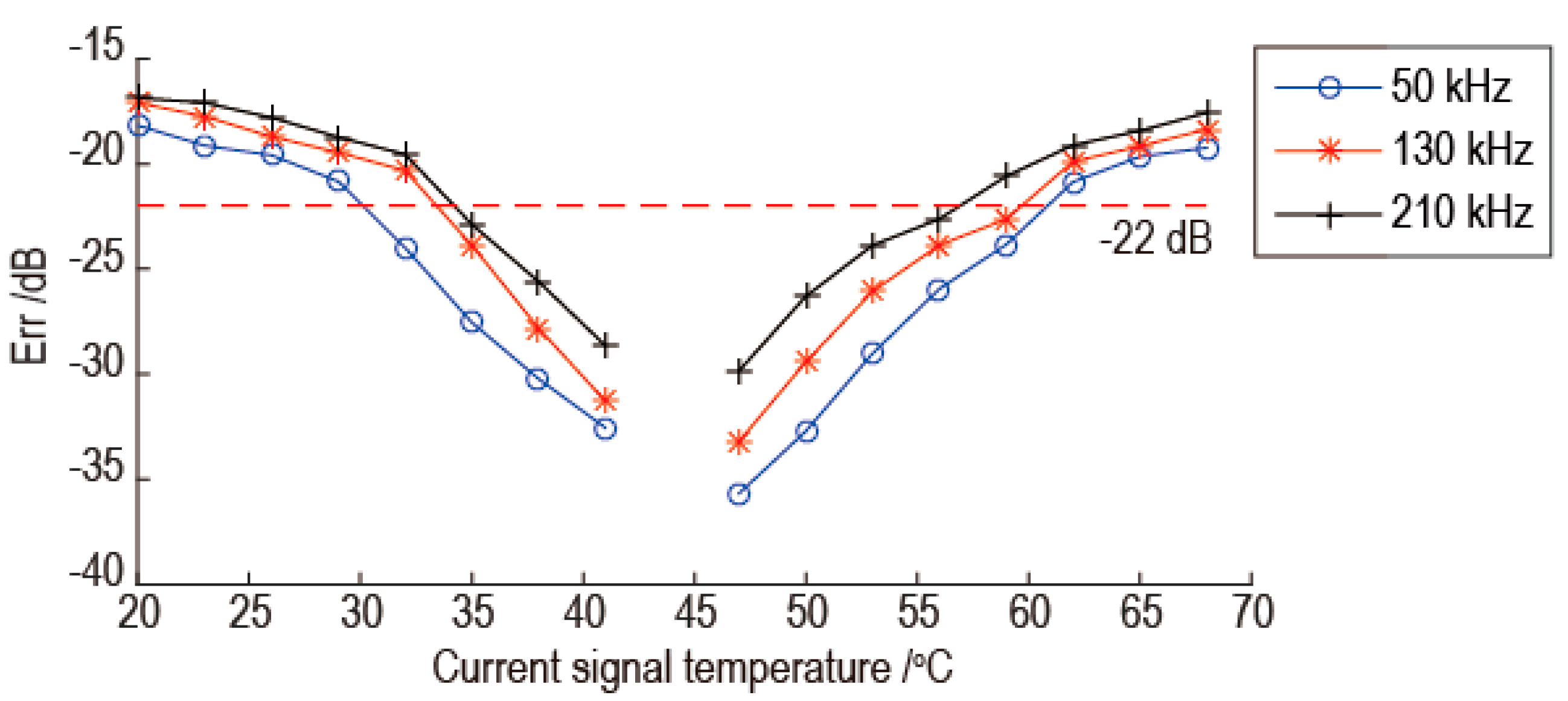
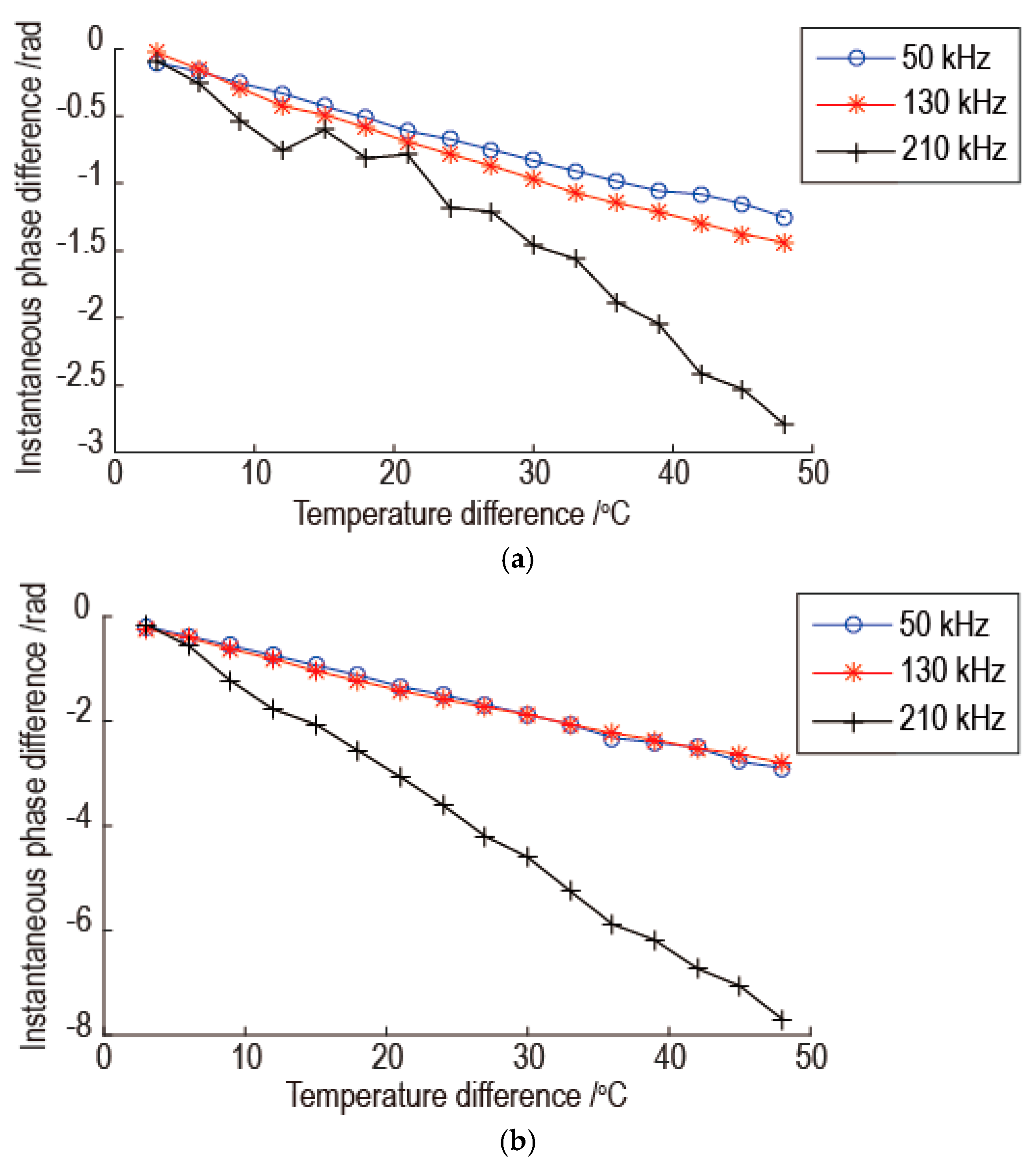
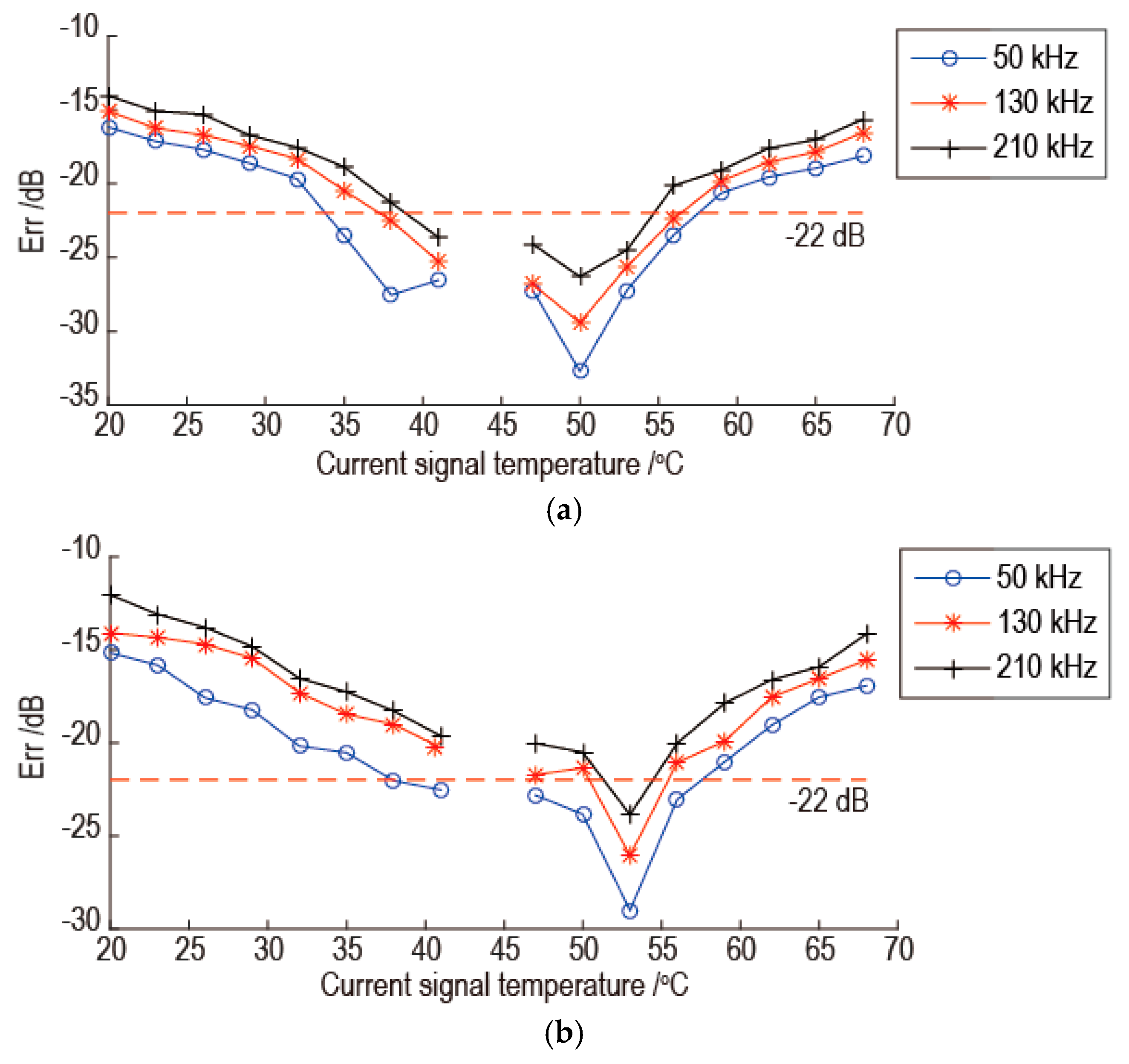
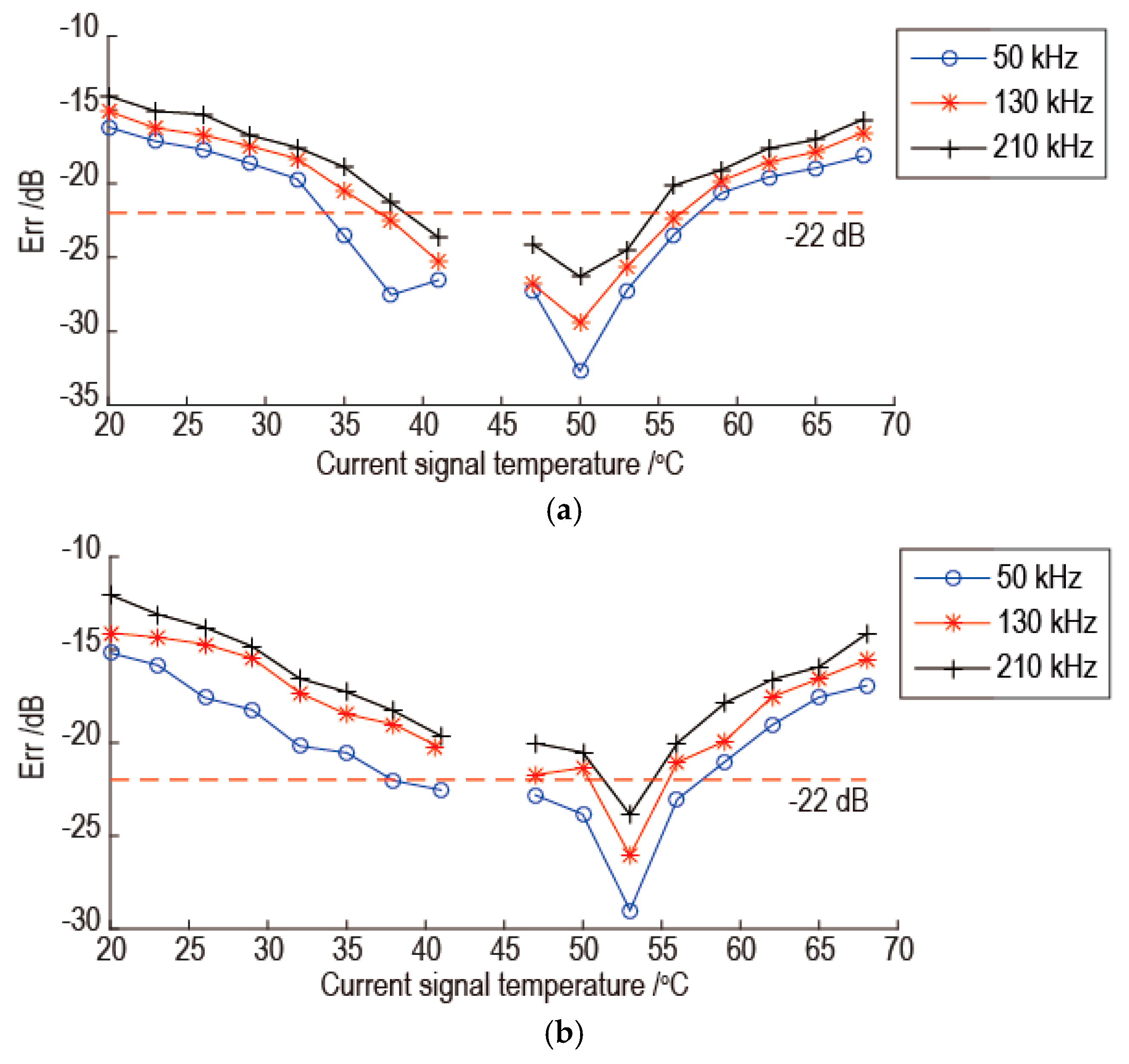
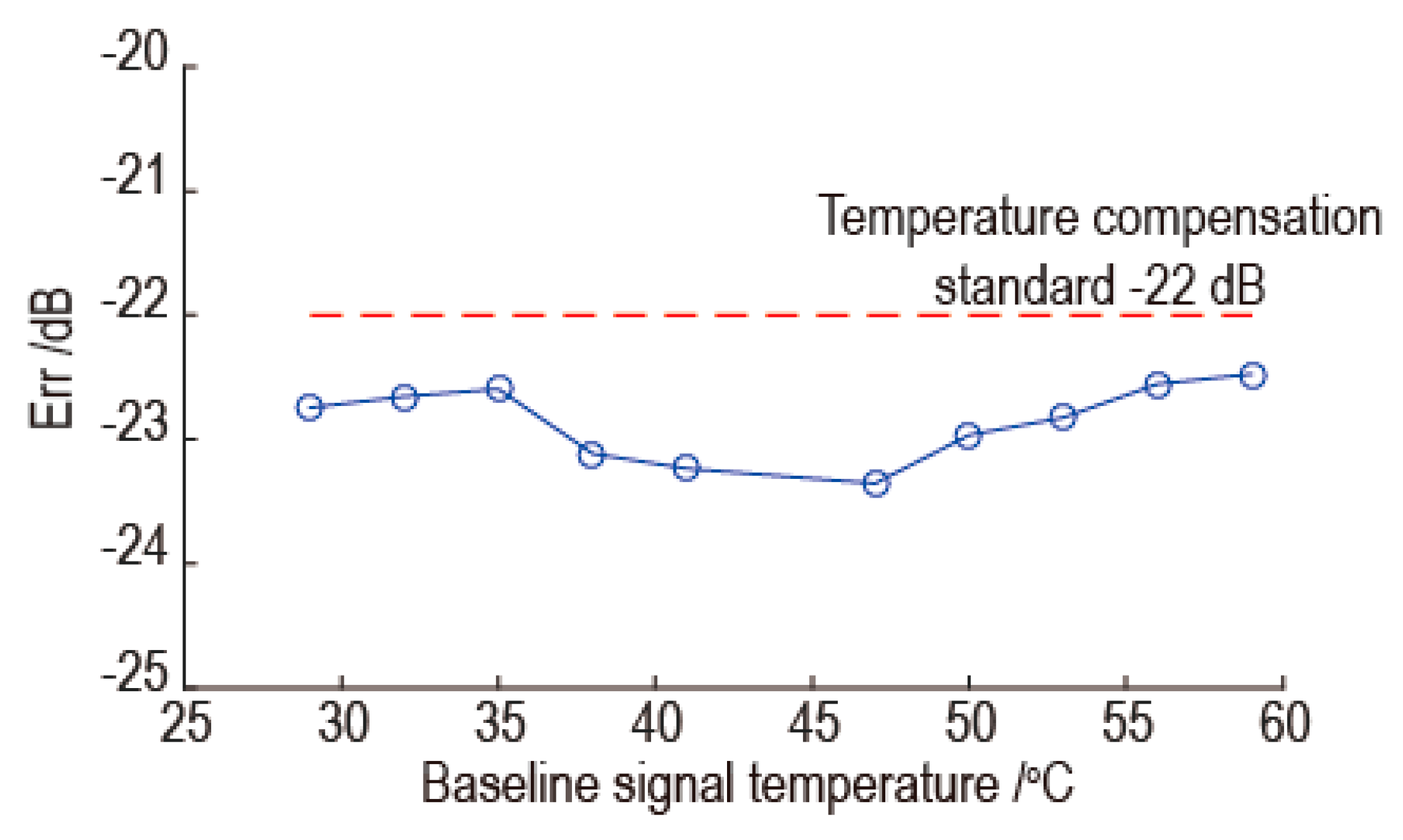
3.2.1. Temperature Compensation Standard
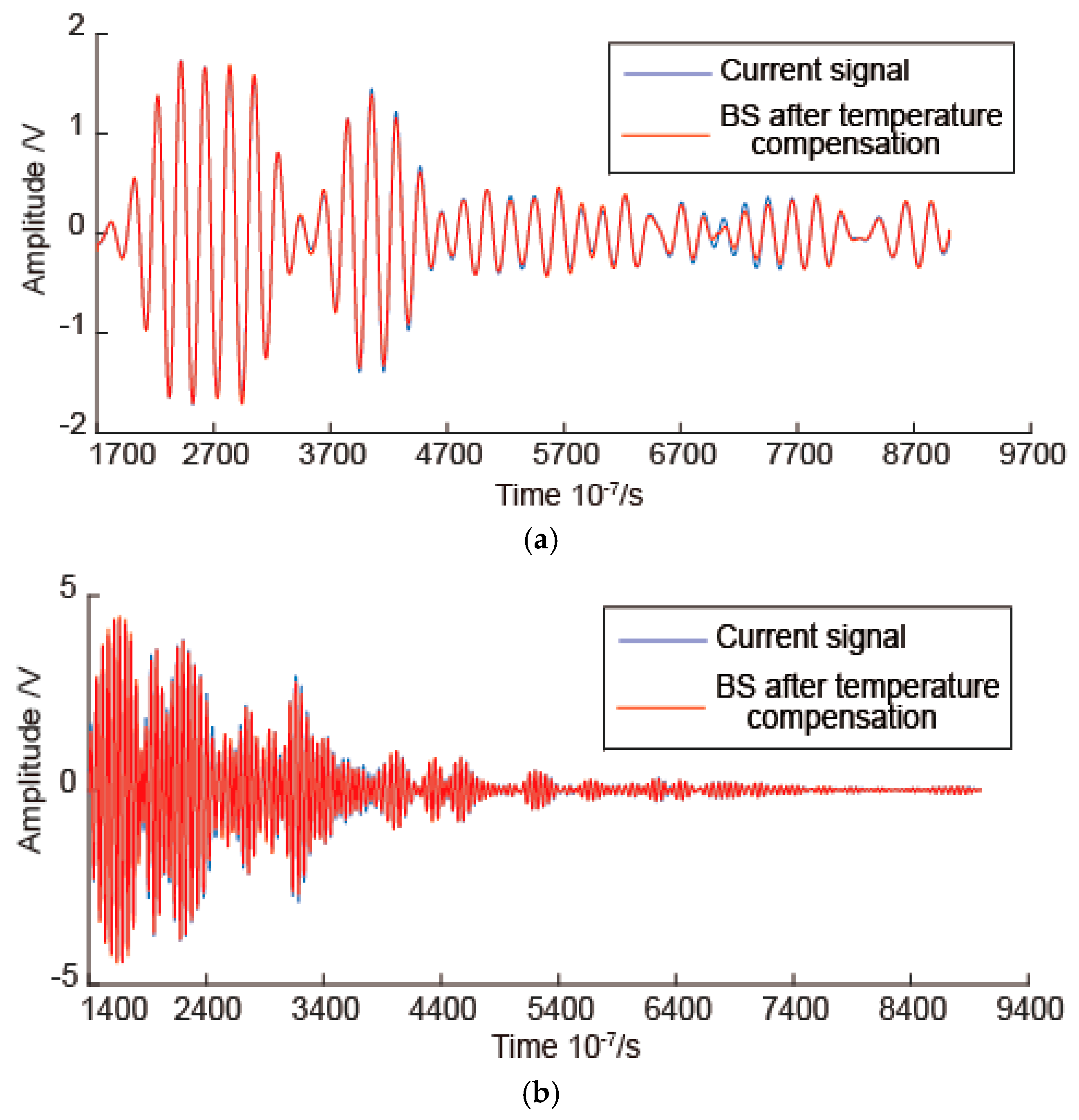
3.2.2. Temperature Compensation Results
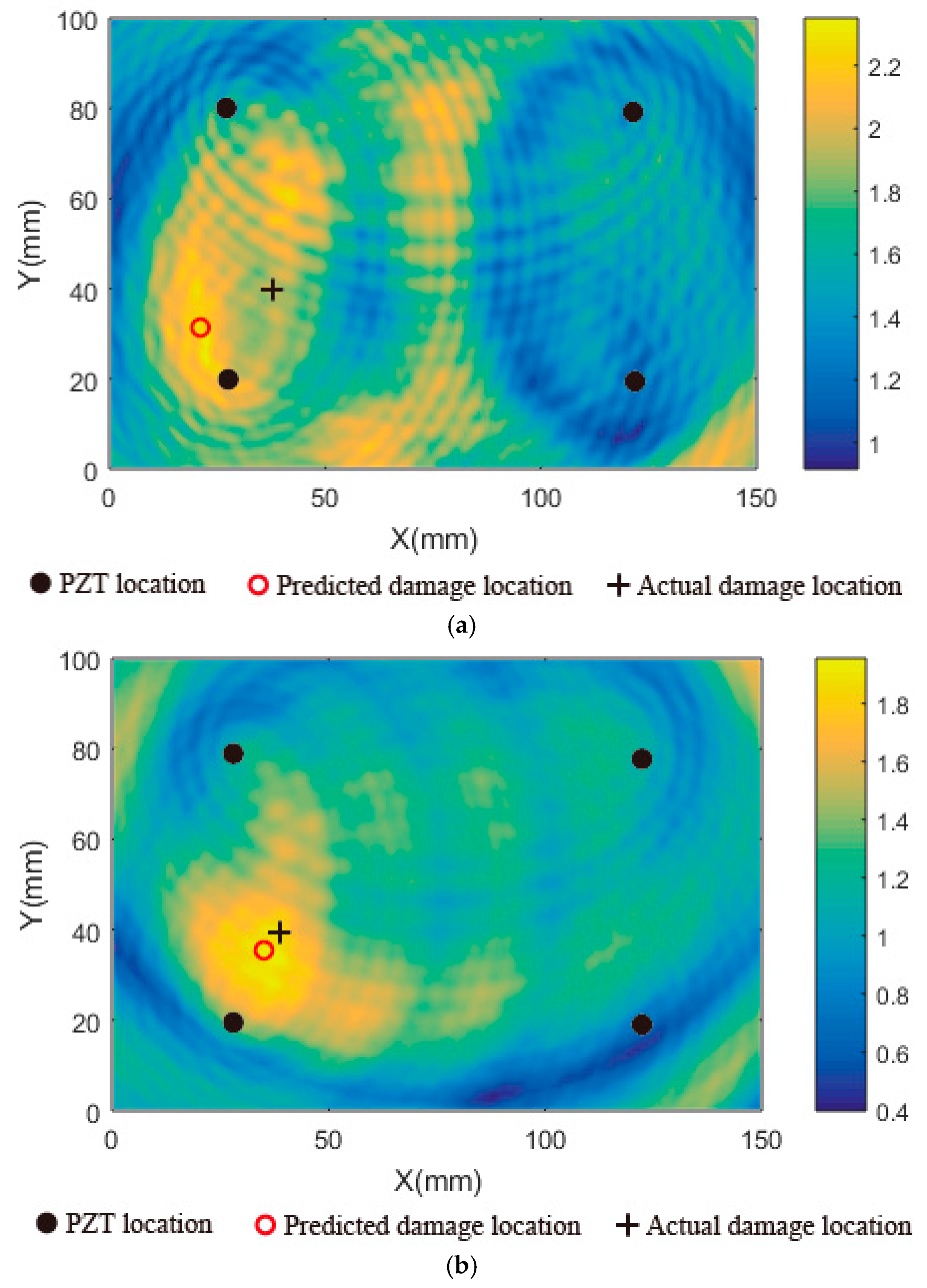
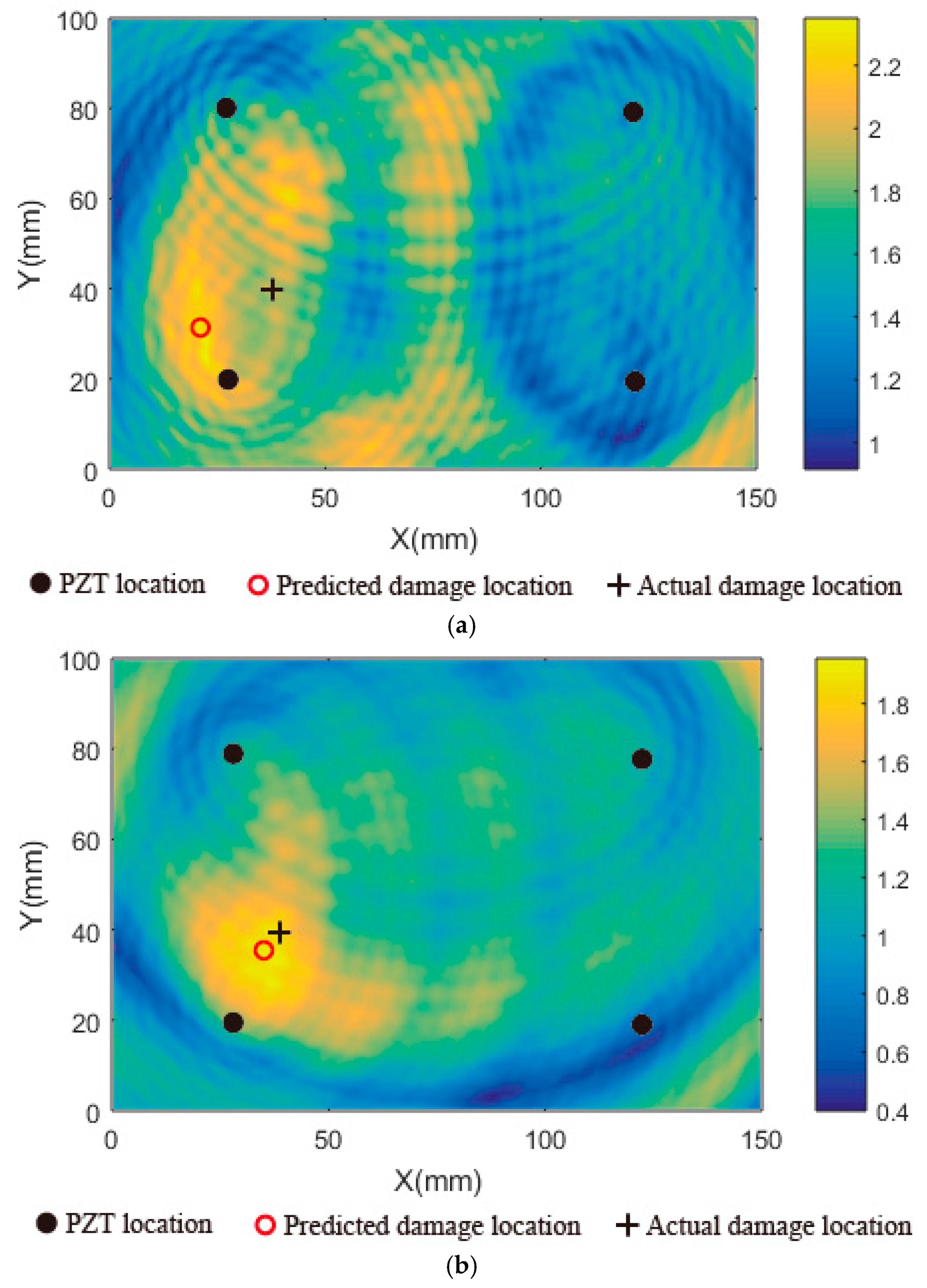
4. Damage Detection Validation
- (a)
- Baseline signals were collected at 18 °C without damage.
- (b)
- Reference signals were collected at 20 °C without damage.
- (c)
- Damage was produced by an impact on the specimen with a hammer.
- (d)
- Environment temperature was increased to 26 °C.
- (e)
- Current signals with damage were measured at 26 °C.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hu, N.; Shimomukai, T.; Fukunaga, H.; Su, Z.Q. Damage identification of metallic structures using A0 mode of Lamb wave. Struct. Health Monit. 2008, 7, 271–285. [Google Scholar]
- Mujica, L.E.; Vehi, J.; Ruiz, M.; Verleysen, M.; Staszewski, W.; Worden, K. Multivariate statistics process control for dimensionality reduction in structural assessment. Mech. Syst. Signal Process. 2008, 22, 155–171. [Google Scholar] [CrossRef]
- Stolze, F.; Staszewski, W.J.; Manson, G.; Worden, K. Fatigue crack detection in a multi-riveted strap joint aluminium panel. Proc. SPIE 2009, 7295. [Google Scholar] [CrossRef]
- Levine, R.M.; Michaels, J.E. Model-based imaging of damage with Lamb waves via sparse reconstruction. J. Acoust. Soc. Am. 2013, 133, 1525–1534. [Google Scholar] [CrossRef] [PubMed]
- Sharif-Khodaei, Z.; Aliabadi, M.H. Assessment of delay-and-sum algorithms for damage detection in aluminium and composite plates. Smart Mater. Struct. 2014, 23, 628–634. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.F.; Mei, H.F.; Fang, F. An improved Gaussian mixture model for damage propagation monitoring of an aircraft wing spar under changing structural boundary conditions. Sensors 2016, 16, 291. [Google Scholar] [CrossRef] [PubMed]
- Yu, L.Y.; Giurgiutiu, V.; Wang, J.J.; Shin, Y.J. Corrosion detection with piezoelectric wafer active sensors using pitch-catch waves and cross-time-frequency analysis. Struct. Health Monit. 2012, 11, 83–93. [Google Scholar] [CrossRef]
- An, Y.K.; Kim, J.H.; Yim, H.J. Lamb wave line sensing for crack detection in a welded stiffener. Sensors 2014, 14, 12871–12884. [Google Scholar] [CrossRef] [PubMed]
- Ng, C.T.; Veidt, M. Scattering characteristics of Lamb waves from debondings at structural features in composite laminates. J. Acoust. Soc. Am. 2012, 132, 115–123. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peng, T.S.; He, J.J.; Xiang, Y.B.; Liu, Y.M.; Saxena, A.; Celaya, J.; Goebel, K. Probabilistic fatigue damage prognosis of lap joint using Bayesian updating. J. Intell. Mater. Syst. Struct. 2015, 26, 965–979. [Google Scholar] [CrossRef]
- Cawley, P.; Cegla, F.; Galvagni, A. Guided waves for NDT and permanently installed monitoring. Insight Non-Destr. Test. Cond. Monit. 2012, 54, 594–601. [Google Scholar] [CrossRef]
- Andrews, J.P.; Palazotto, A.N.; DeSimio, M.P.; Olson, S.E. Lamb wave propagation in varying isothermal environments. Struct. Health Monit. 2008, 7, 265–270. [Google Scholar] [CrossRef]
- Raghavan, A.; Cesnik, C.E.S. Effect of elevated temperature on guided-wave structural health monitoring. J. Intell. Mater. Syst. Struct. 2008, 19, 1383–1398. [Google Scholar] [CrossRef]
- Kijanka, P.; Radecki, R.; Packo, P.; Staszewski, W.J.; Uhl, T. GPU-based localinteraction simulation approach for simplified temperature effect modelling in lamb wave propagation used for damage detection. Smart Mater. Struct. 2013, 22, 035014. [Google Scholar] [CrossRef]
- Putkis, O.; Dalton, R.P.; Croxford, A.J. The influence of temperature variations on ultrasonic guided waves in anisotropic CFRP plates. Ultrasonics 2015, 60, 109–116. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.C.; Manson, G.; Staszewski, W.J. Environmental effects on lamb wave responses from piezoceramic sensors. In Proceedings of the 5th International Conference on Modern Practice in Stress and Vibration Analysis, Glasgow, UK, 9–11 September 2003.
- Manson, G.; Lee, B.C.; Staszewski, W.J. Eliminating environmental effects from Lamb wave-based structural health monitoring. In Proceedings of the International Conference on Modal Analysis, Noise and Vibration Engineering, Louvain, Belgium, 20–22 September 2004.
- Lu, Y.H.; Michaels, J.E. A methodology for structural health monitoring with diffuse ultrasonic waves in the presence of temperature variations. Ultrasonics 2005, 43, 717–731. [Google Scholar] [CrossRef] [PubMed]
- Konstantinidis, G.; Drinkwater, B.W.; Wilcox, P.D. The temperature stability of guided wave structural health monitoring systems. Smart Mater. Struct. 2006, 15, 967–976. [Google Scholar] [CrossRef]
- Michaels, J.E.; Michaels, T.E. Detection of structural damage from the local temporal coherence of diffuse ultrasonic signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 1769–1782. [Google Scholar] [CrossRef] [PubMed]
- Harley, J.B.; Moura, J.M.F. Scale transform signal processing for optimal ultrasonic temperature compensation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 2226–2236. [Google Scholar] [CrossRef] [PubMed]
- Clarke, T.; Cawley, P.; Wilcox, P.D.; Croxford, A.J. Evaluation of the damage detection capability of a sparse-array guided-wave SHM system applied to a complex structure under varying thermal conditions. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 2666–2678. [Google Scholar] [CrossRef] [PubMed]
- Clarke, T.; Simonetti, F.; Cawley, P. Guided wave health monitoring of complex structures by sparse array systems: Influence of temperature changes on performance. J. Sound Vib. 2010, 329, 2306–2322. [Google Scholar] [CrossRef]
- Croxford, A.J.; Moll, J.; Wilcox, P.D.; Michaels, J.E. Efficient temperature compensation strategies for guided wave structural health monitoring. Ultrasonics 2010, 50, 517–528. [Google Scholar] [CrossRef] [PubMed]
- Ambrozinski, L.; Magda, P.; Stepinski, T.; Uhl, T.; Dragan, K. A method for compensation of the temperature effect disturbing Lamb waves propagation. In Proceedings of the 10th International Conference on Barkhausen and Micro-Magnetics (ICBM), Baltimore, MD, USA, 21–26 July 2013.
- Dworakowski, Z.; Ambrozinski, L.; Stepinski, T. Data fusion for compensation of temperature variations in Lamb-wave based SHM systems. Proc. SPIE 2015, 9438. [Google Scholar] [CrossRef]
- Dao, P.B.; Staszewski, W.J. Cointegration approach for temperature effect compensation in Lamb-wave-based damage detection. Smart Mater. Struct. 2013, 22, 095002. [Google Scholar] [CrossRef]
- Dao, P.B.; Staszewski, W.J. Data normalisation for Lamb wave-based damage detection using cointegration: A case study with single- and multiple-temperature trends. J. Intell. Mater. Syst. Struct. 2014, 25, 845–857. [Google Scholar] [CrossRef]
- Dao, P.B.; Staszewski, W.J. Lamb wave based structural damage detection using cointegration and fractal signal processing. Mech. Syst. Signal Proc. 2014, 49, 285–301. [Google Scholar] [CrossRef]
- Roy, S.; Lonkar, K.; Janapati, V.; Chang, F.K. A novel physics-based temperature compensation model for structural health monitoring using ultrasonic guided waves. Struct. Health. Monit. 2014, 13, 321–342. [Google Scholar] [CrossRef]
- Wang, Y.S.; Gao, L.M.; Yuan, S.F.; Qiu, L.; Qing, X.L. An adaptive filter-based temperature compensation technique for structural health monitoring. J. Intell. Mater. Syst. Struct. 2014, 25, 2187–2198. [Google Scholar] [CrossRef]
- Fendzi, C.; Rébillat, M.; Mechbal, N.; Guskov, M.; Coffignal, G. A data-driven temperature compensation approach for Structural Health Monitoring using Lamb waves. Struct. Health. Monit. 2016. [Google Scholar] [CrossRef]
- Pati, Y.C.; Rezaiifar, R.; Krishnaprasad, P.S. Orthogonal matching pursuit: Recursive function approximation with applications to wavelet decomposition. In Proceedings of the 27th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–3 November 1993.
- Michaels, J.E. Detection, localization and characterization of damage in plates with an in situ array of spatially distributed ultrasonic sensors. Smart Mater. Struct. 2008, 17, 035035. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Baseline Signal (°C) | Reference Signal (°C) | Baseline Signal (°C) | Reference Signal (°C) |
|---|---|---|---|
| 29 | 32 | 47 | 50 |
| 32 | 35 | 50 | 53 |
| 35 | 38 | 53 | 56 |
| 38 | 41 | 56 | 59 |
| 41 | 44 | 59 | 62 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Xiao, Y.; Zhang, H.; Ren, G. Baseline Signal Reconstruction for Temperature Compensation in Lamb Wave-Based Damage Detection. Sensors 2016, 16, 1273. https://doi.org/10.3390/s16081273
Liu G, Xiao Y, Zhang H, Ren G. Baseline Signal Reconstruction for Temperature Compensation in Lamb Wave-Based Damage Detection. Sensors. 2016; 16(8):1273. https://doi.org/10.3390/s16081273
Chicago/Turabian StyleLiu, Guoqiang, Yingchun Xiao, Hua Zhang, and Gexue Ren. 2016. "Baseline Signal Reconstruction for Temperature Compensation in Lamb Wave-Based Damage Detection" Sensors 16, no. 8: 1273. https://doi.org/10.3390/s16081273