
The Traffic Adaptive Data Dissemination (TrAD) Protocol for both Urban and Highway Scenarios

Abstract
:1. Introduction
- For the broadcast suppression technique, a vehicular cluster classification and a sorting technique were designed to improve the reliability of broadcast transmissions and suppress the broadcast storm problem.
- For the store-carry-forward mechanism, specific vehicles were selected to be data-ferries so as to exchange information between different disconnected networks. Moreover, the redundant transmissions of this process were further suppressed.
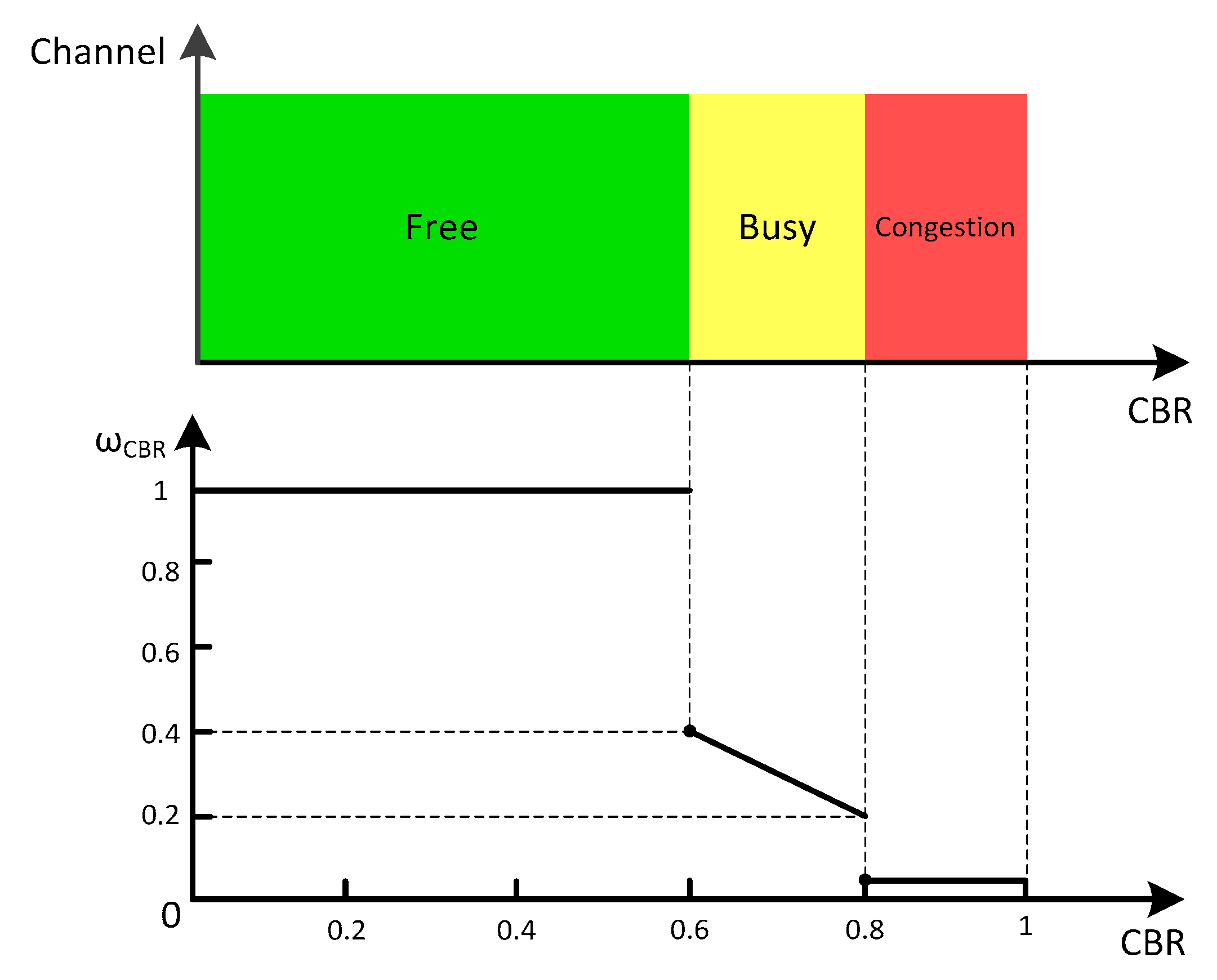
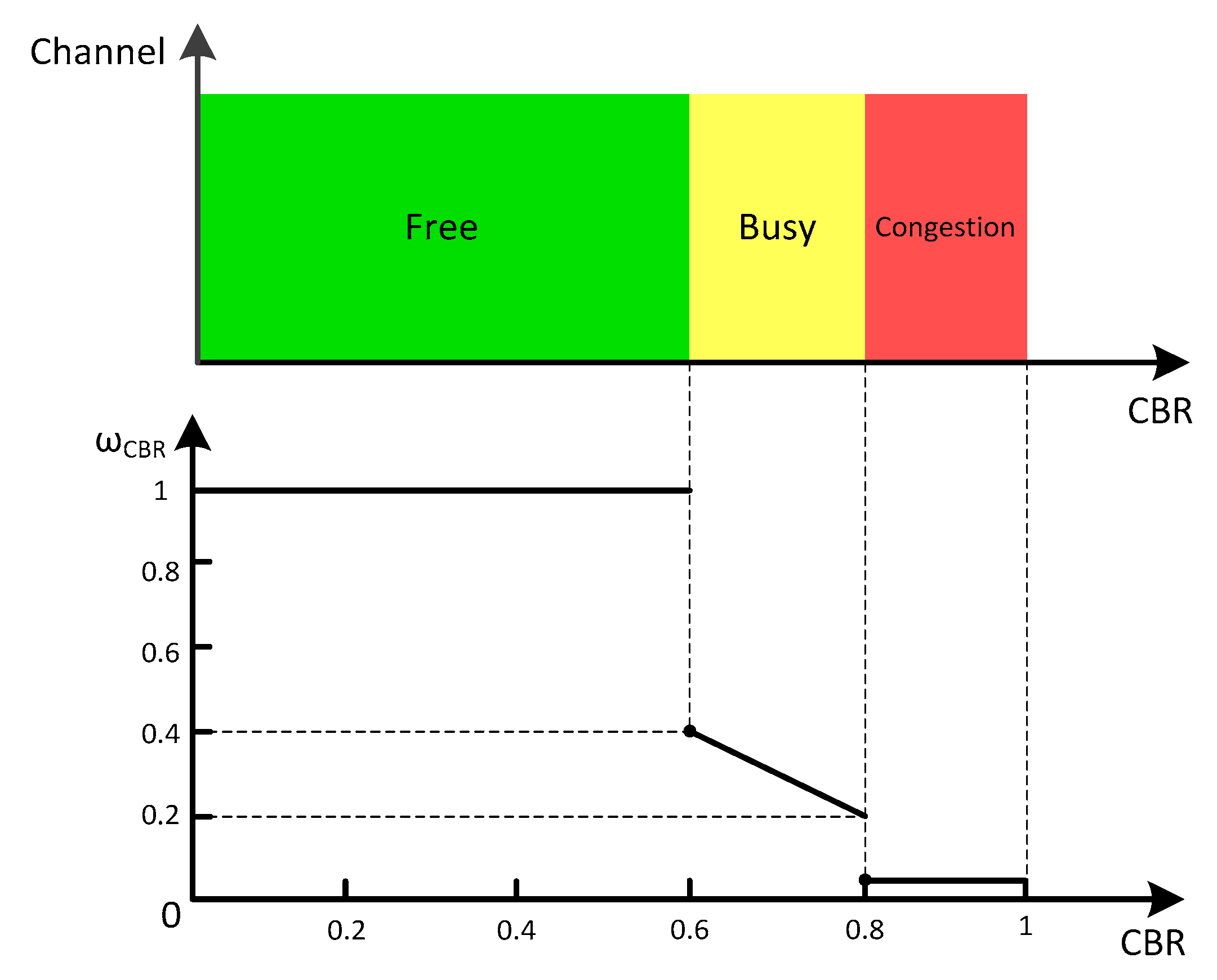
- A channel congestion control was designed according to the status of local network traffic.
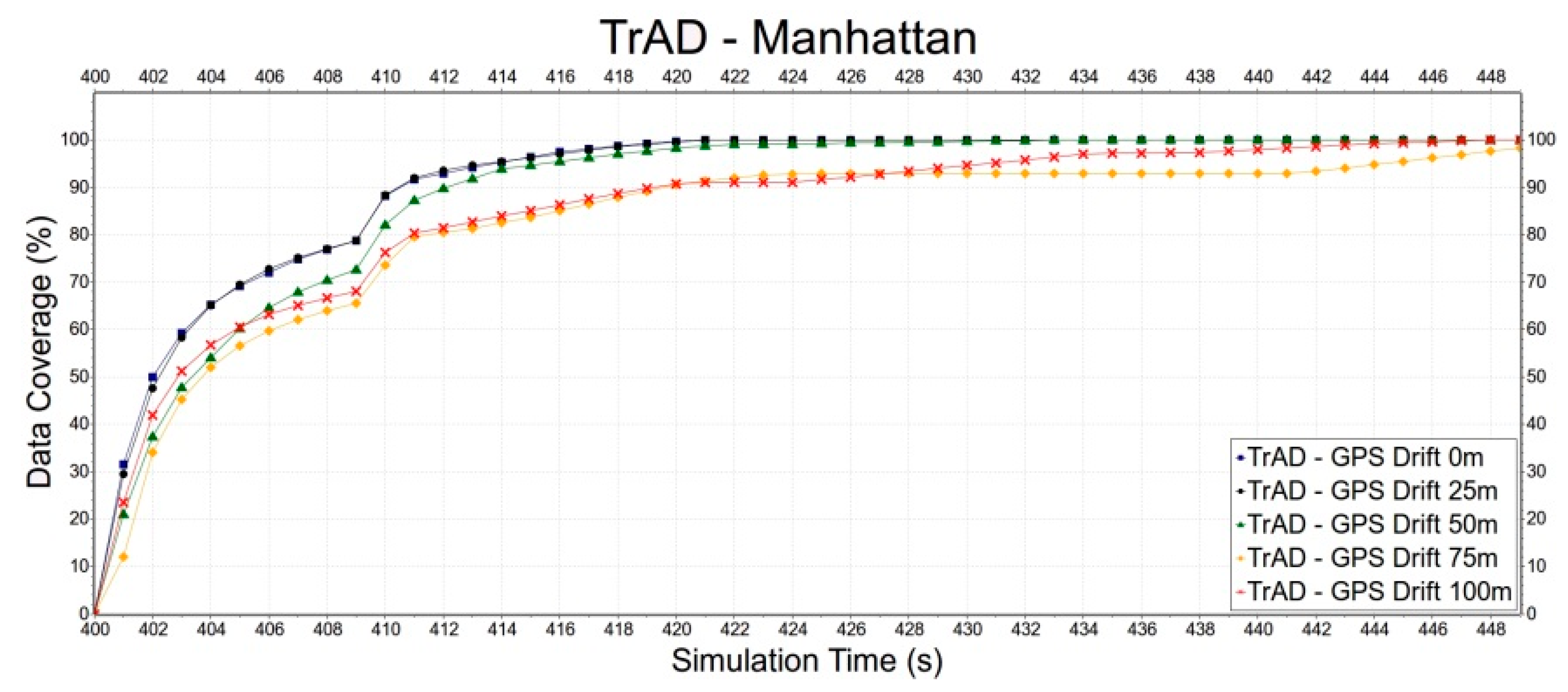
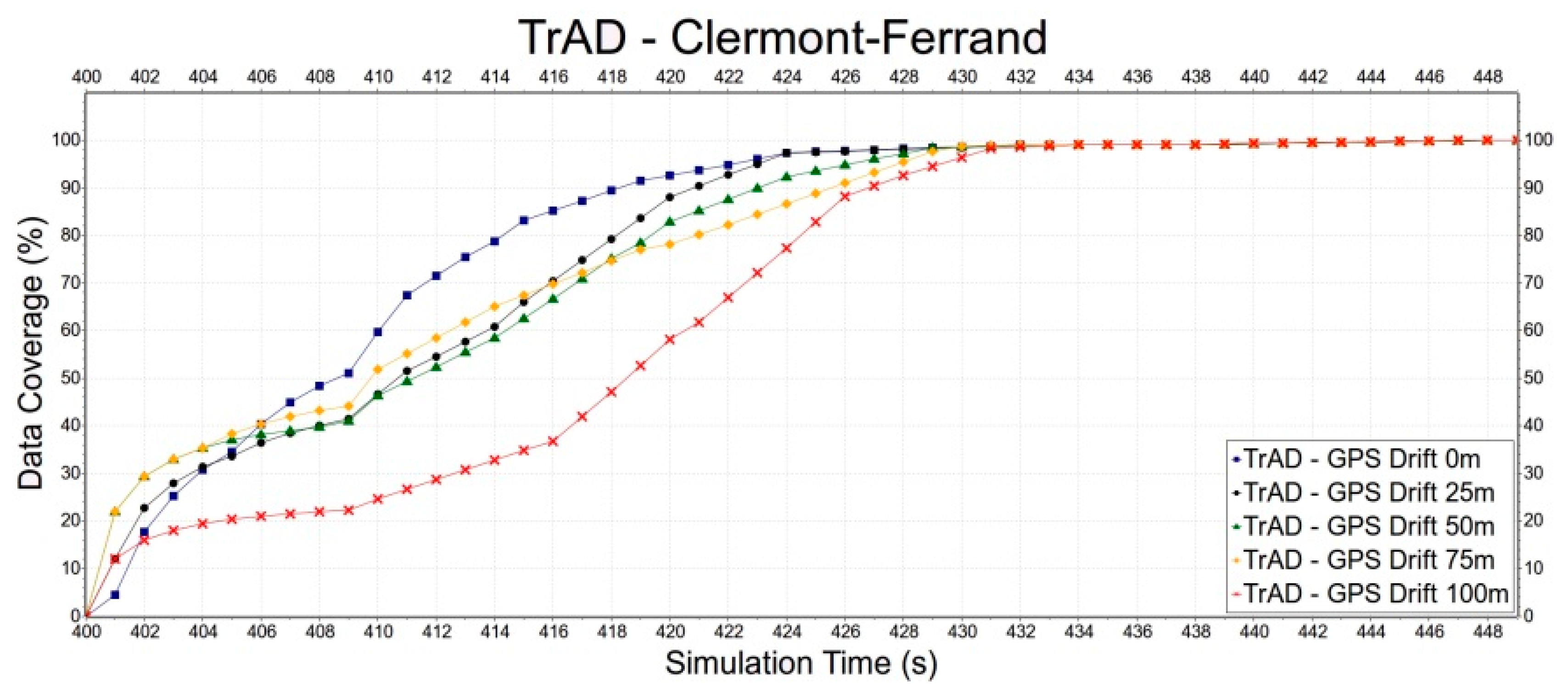
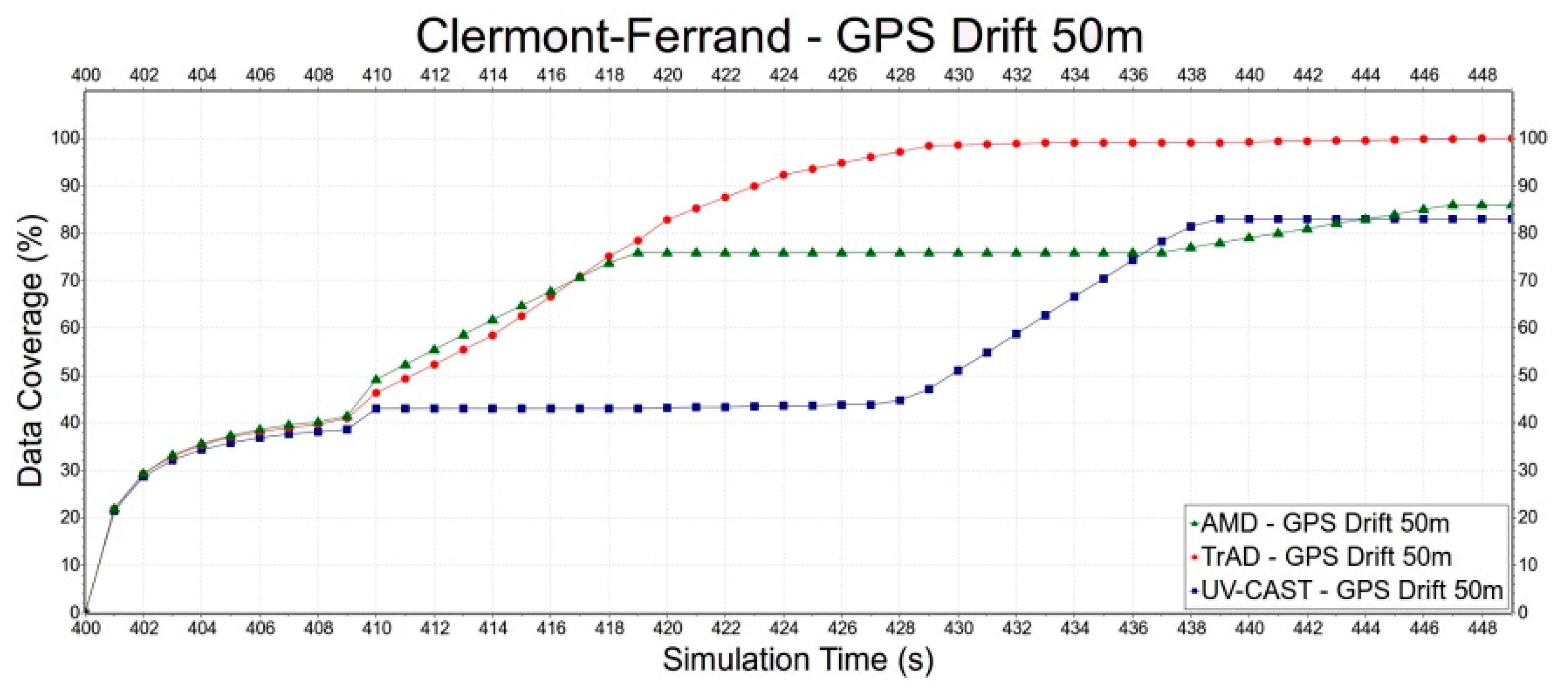
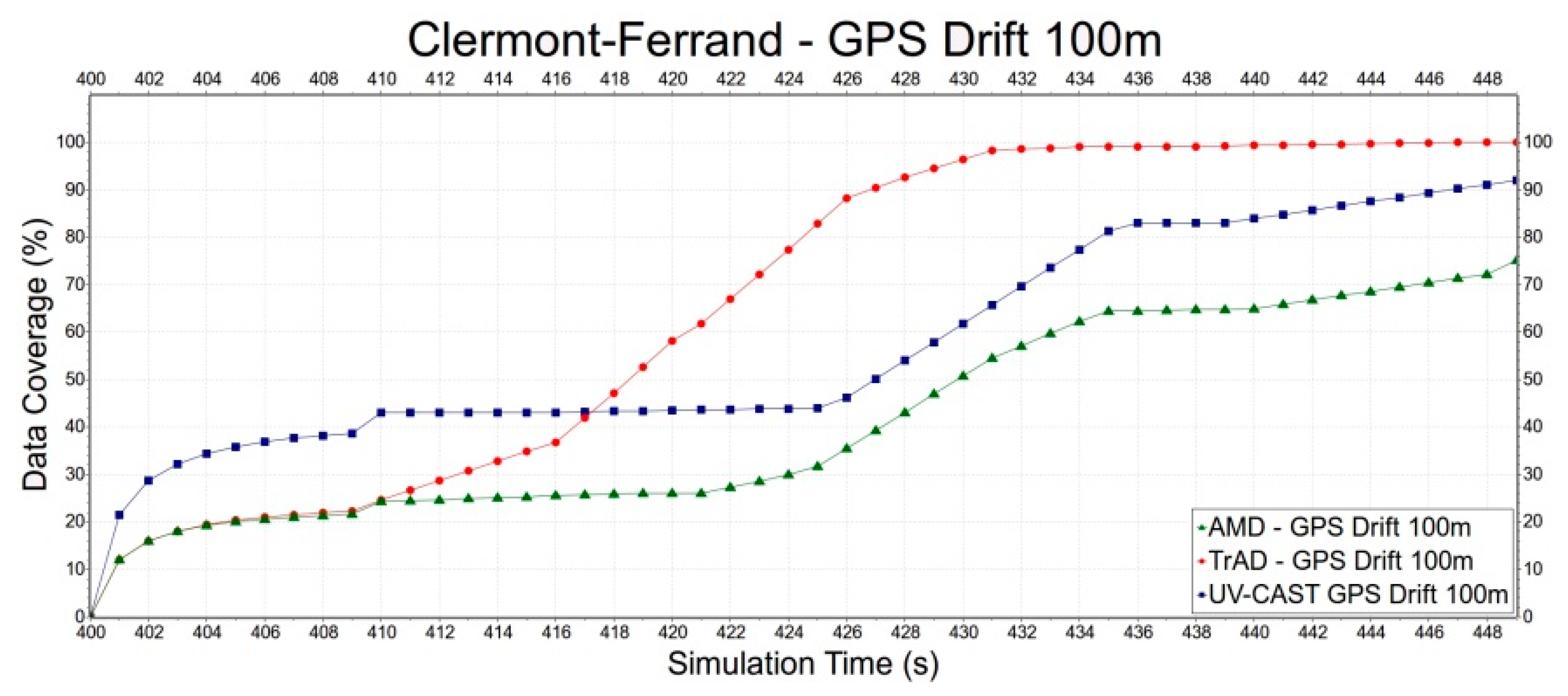
- A comprehensive performance evaluation was performed by means of realistic simulations. Three classical data dissemination protocols were compared with TrAD in both urban and highway scenarios. Furthermore, the impact of GPS drift on the data dissemination speed was also investigated.
2. Related Work
2.1. Broadcast Suppression Technique
2.2. Store-Carry-Forward Mechanism
3. Traffic Adaptive Data Dissemination
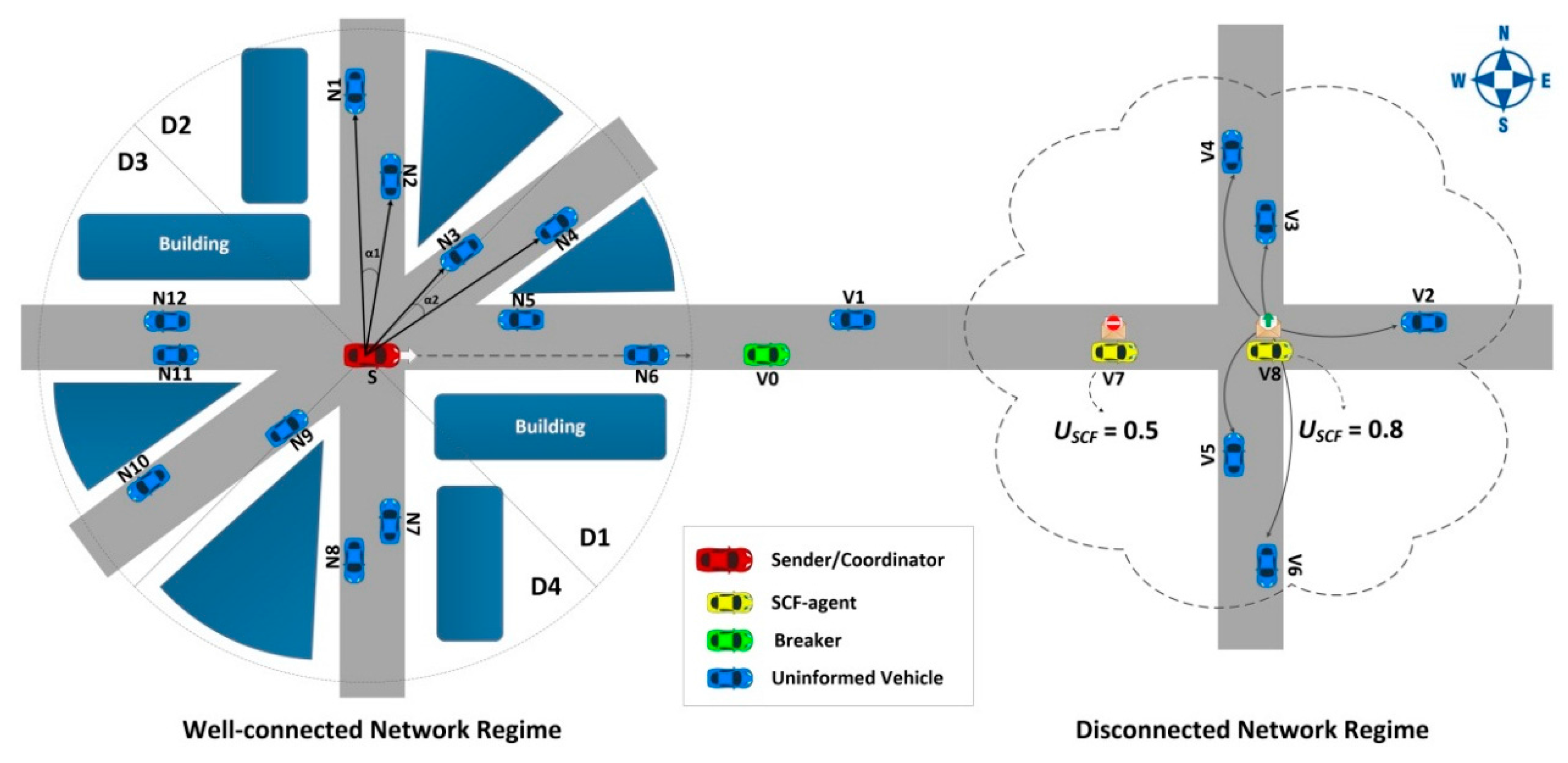
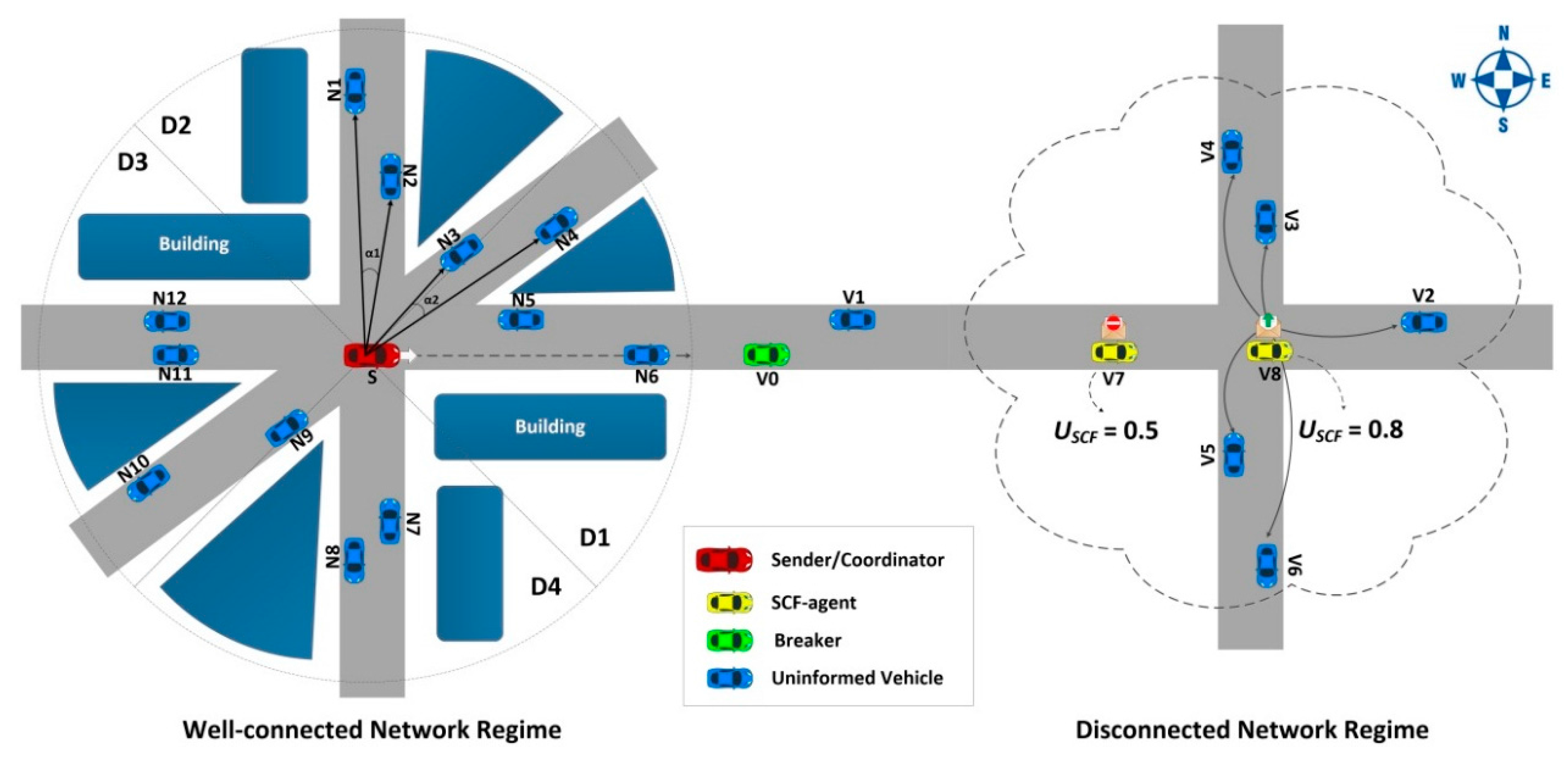
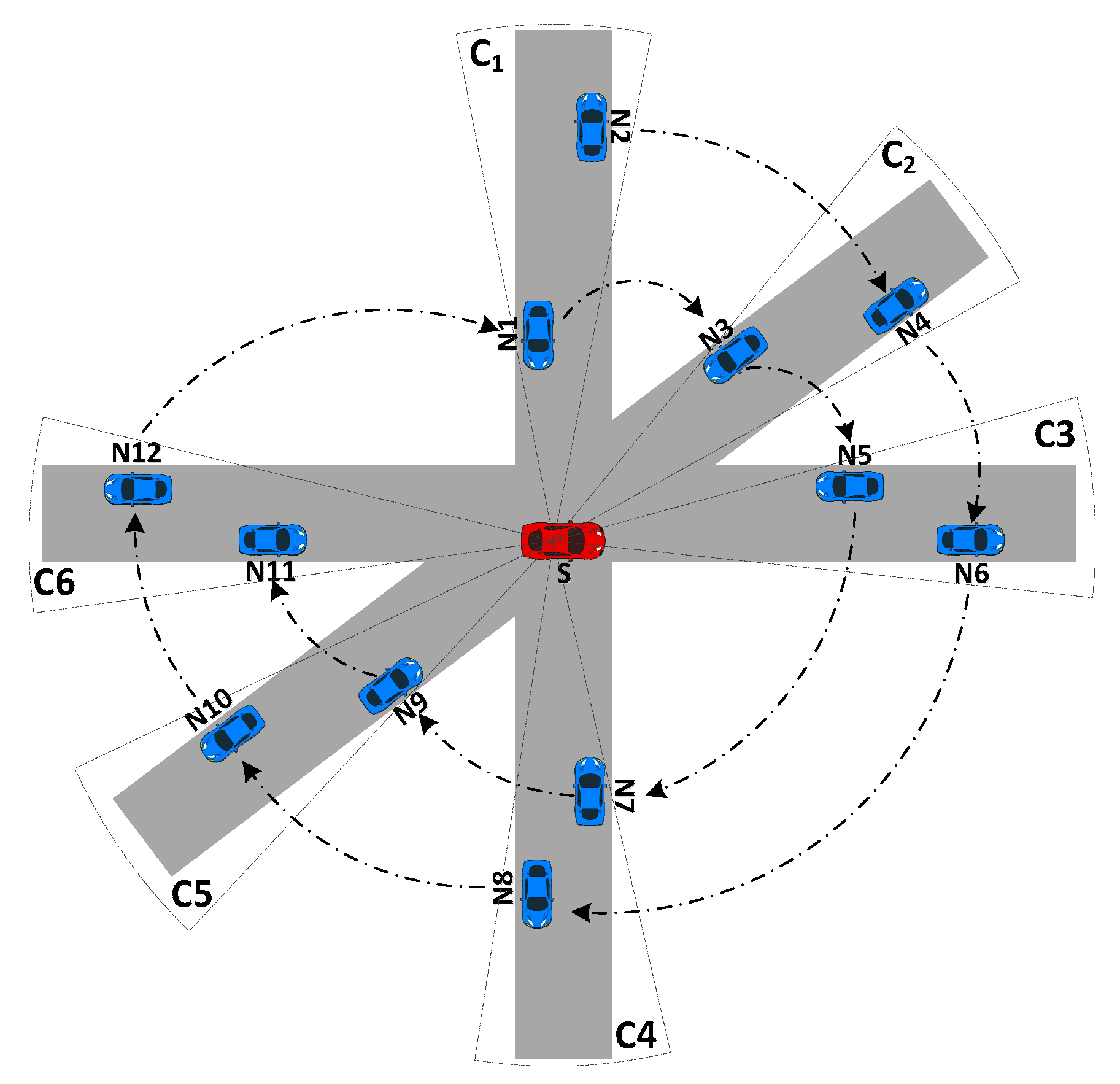
- Directional Cluster : The directional cluster is a group of vehicles in the one-hop neighborhood of a sender S. Moreover, these vehicles are travelling in a similar direction with respect to the sender S. In an ideal situation, S can accurately classify its neighbors into different directional clusters that match the different road topologies around it. For instance, S classifies its neighbors , into and , into as illustrated in Figure 1. The two directional clusters are exactly on the roads in two directions.
- Breaker: In a well-connected network, the breaker is not only the furthest vehicle in the forwarding direction but also moves towards the outside of the vehicular network (e.g., the green vehicle V0 in the Figure 1).
- SCF-agent: The role of a SCF-agent vehicle is to be responsible for storing and carrying the data messages until it meets opportunities to forward (broadcast) the stored data messages to uninformed vehicles that come from other VANETs.
- Beacon and Beaconing: A beacon is defined as a periodic message that is responsible for exchanging the up-to-date status of nodes in the one-hop neighborhood. This periodic exchanging process is called beaconing. The beacon format is defined as following: < Beacon ID, Sender ID, Global GPS Position, Heading, Number of Neighbors, Channel Busy Ratio, Message List >.
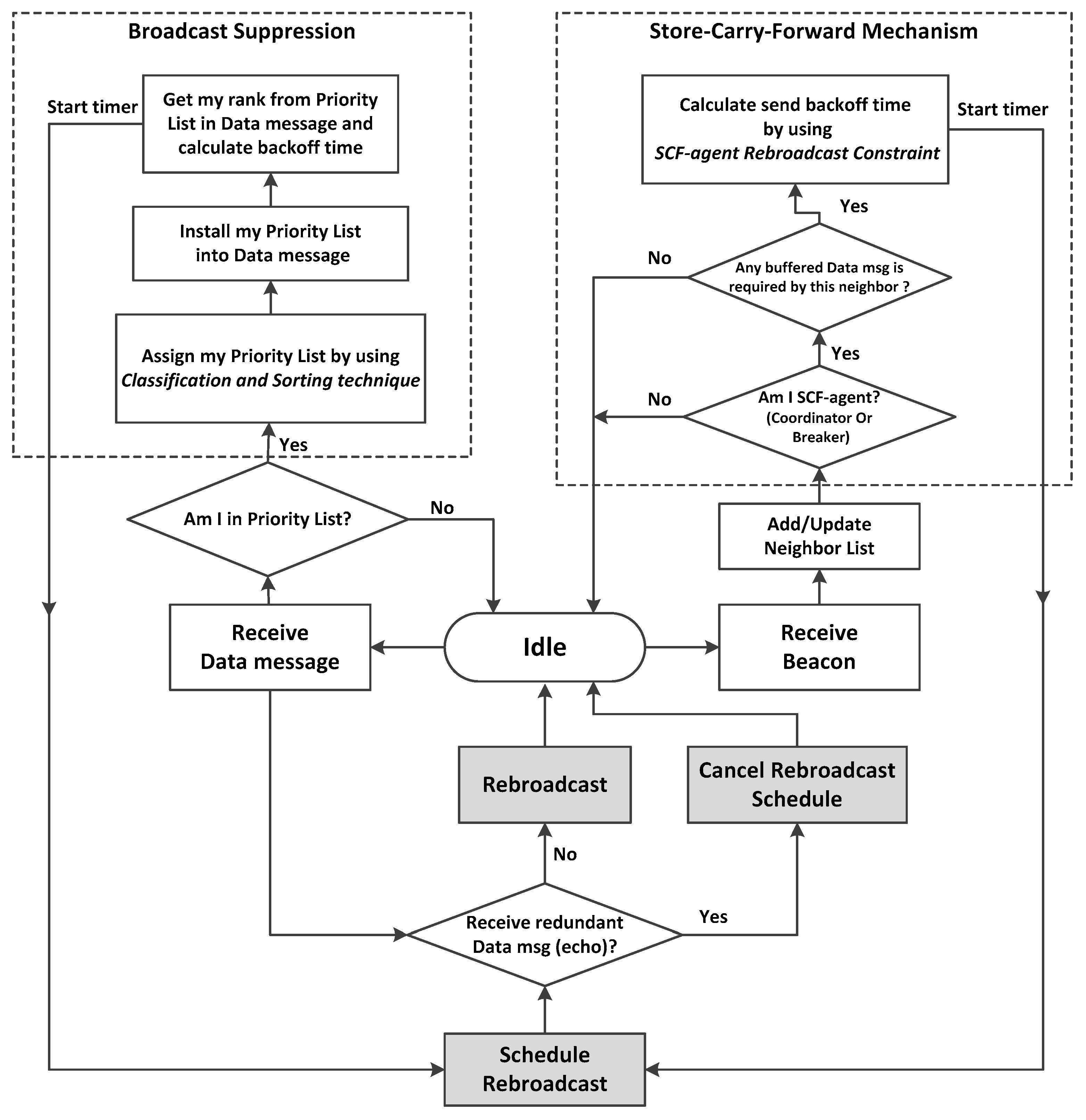
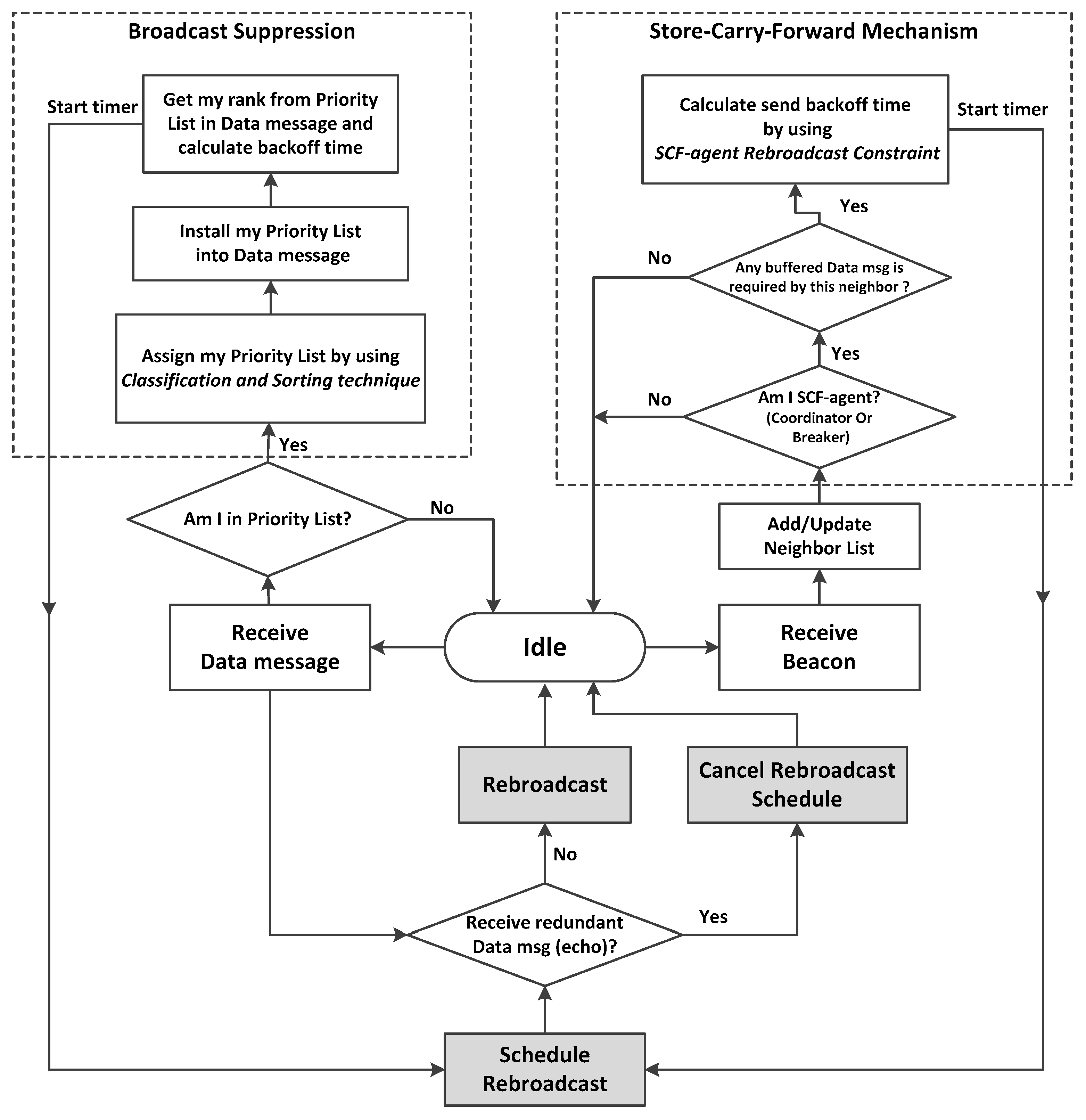
3.1. Broadcast Suppression Technique
3.1.1. Vector-Angle-Based Cluster Classification Mechanism
| Algorithm 1. Vector-angle-based cluster classification algorithm |
| Condition: the sender S receives a data message |
| Input : the position of the sender S and its neighbors |
| 1: while do |
| 2: for i = 1 to num[], d = 1 do |
| 3: eliminate from |
| 4: sort into directional cluster |
| 5: for j = i to num [] do |
| 6: if) then |
| 7: sort into the same of |
| 8: |
| 9: end if |
| 10: j++ |
| 11: end for |
| 12: save into cluster buffer |
| 13: d++ |
| 14: end for |
| 15: end while |
3.1.2. Traffic Adaptive Sorting Technique
3.2. Store-Carry-Forward Mechanism
3.2.1. The Selection of SCF-Agent
- Coordinator: After preloading an intersection position list of the urban map into the system; every vehicle will detect the distance between itself and all intersections when the vehicle receives a beacon message. If the distance is less than 20 m, the vehicle is defined as a coordinator. Breaker: The flow chart of identification of a breaker is shown in Figure 5. When a vehicle receives a data message, it will detect and eliminate the possibility of the coordinator role. Then, the vehicle determines whether its moving direction is the same as the data forwarding direction. If so, the vehicle will look up whether there is a further neighbor moving at the front. If not, the vehicle is defined as the breaker. In particular, this procedure is carried out at a continuous process until the boundary of the well-connected network is established.
3.2.2. SCF-Agent Rebroadcast Constraint Technique
4. Performance Evaluation
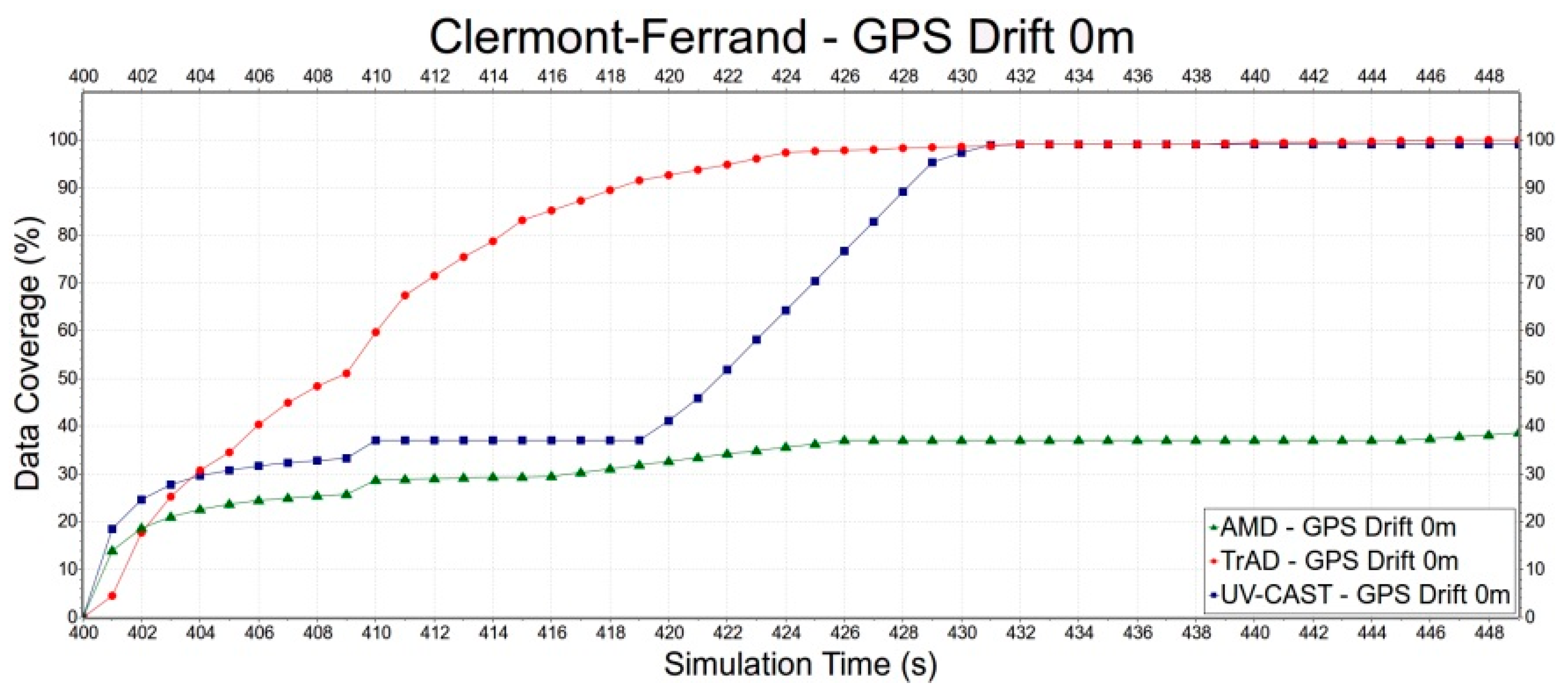
- DV-CAST is a distributed broadcast protocol for highway scenarios with zero infrastructure support. The protocol resorts to neighbor detection to distinguish between vehicles Vs driving in the same direction with respect to the source vehicle and those Vo driving in the opposite direction. If the vehicles Vs are connected to each other, the broadcast suppression technique will be used in multi-hop broadcasts. However, if there are gaps between clusters, the store-carry-forward mechanism will be performed to select some of vehicles Vo to be SCF-agents. In the simulation of this paper, we use the slotted 1-persistence broadcast suppression technique and set the total number of time slots to 5, the slot time to 5 ms.
- UV-CAST is a distributed broadcast protocol specialized for infrastructure-less urban VANETs. The protocol uses a gift-wrapping algorithm to select boundary vehicles to store, carry and forward messages to fill the gap between different partitioned or disconnected networks. It also uses a lightweight suppression technique for well-connected networks. This technique assigns a higher priority to the vehicle located at an intersection to rebroadcast, which can disseminate the data message in more directions and suppress the redundant broadcast. In the simulation of this paper, we set the maximum waiting time to 500 ms that is the same as the simulation setting in the original paper. Furthermore, a position list of intersections is preloaded in the system. If the distance between a vehicle and one of intersections is less than 20 m, the vehicle is believed to be at the intersection.
- AMD is an infrastructure-less data dissemination protocol supporting both highway and urban scenarios. A generalized time slot scheme is used to suppress broadcasting, which is based on directional sectors. The number of directional sector is adjusted adaptively between two or four according to the local road topology and the distribution of neighbors. A store-carry-forward mechanism resorts to a role transition, i.e., from tail to non-tail, to trigger a new broadcast to uninformed vehicles. In the simulation of this paper, the time slot is set to 5 ms and one time slot is assigned to one vehicle, i.e., . Moreover, the additional delay is set to one DIFS, i.e., 58 μs. The position list of intersections is preloaded in the system and is operated as the UV-CAST case.
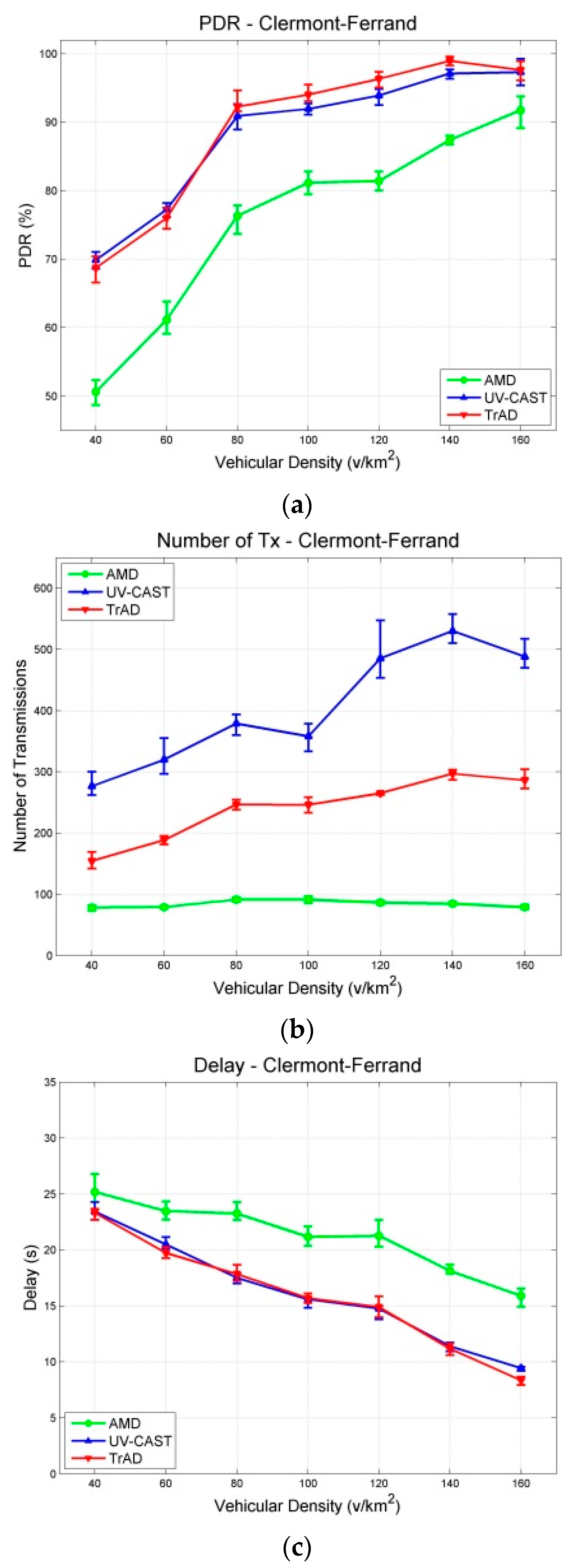
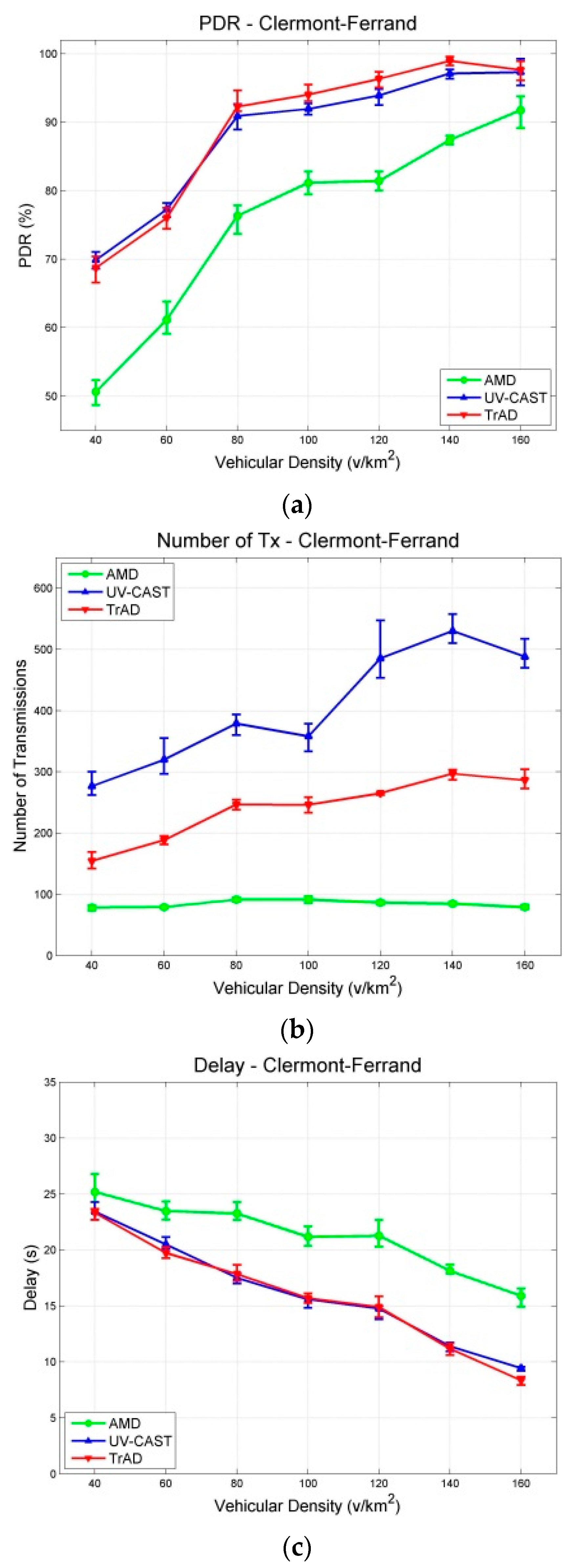
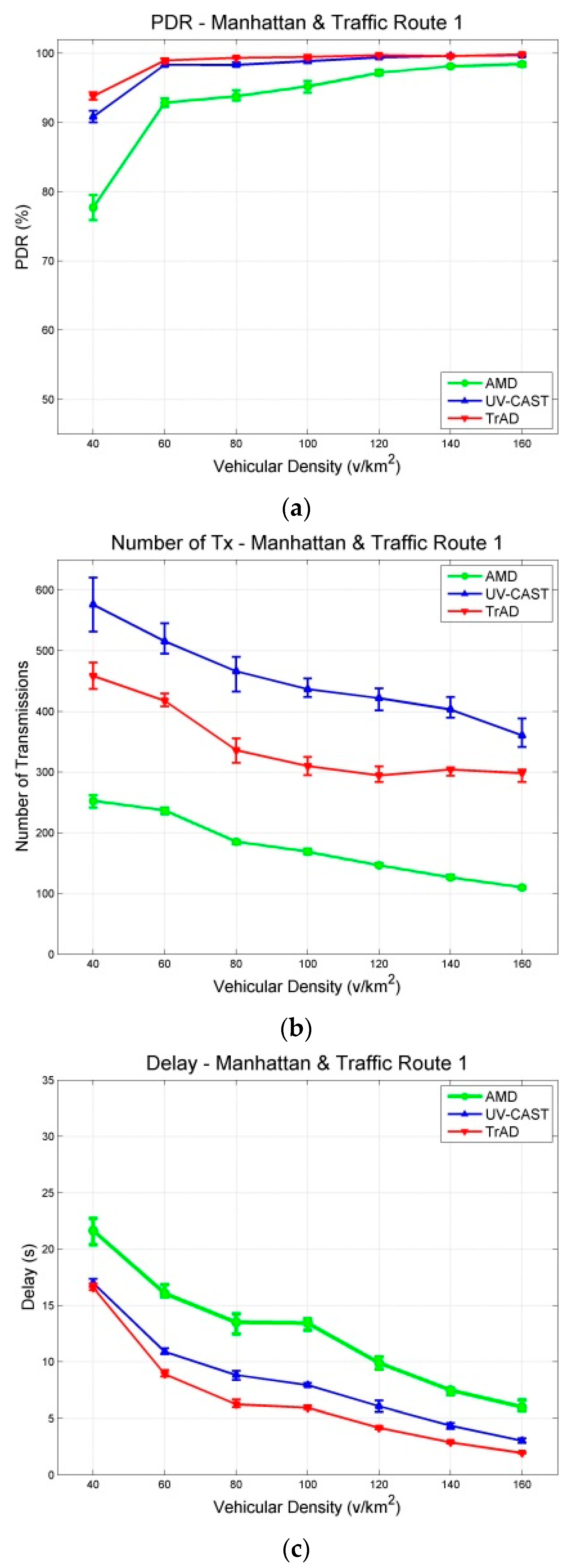
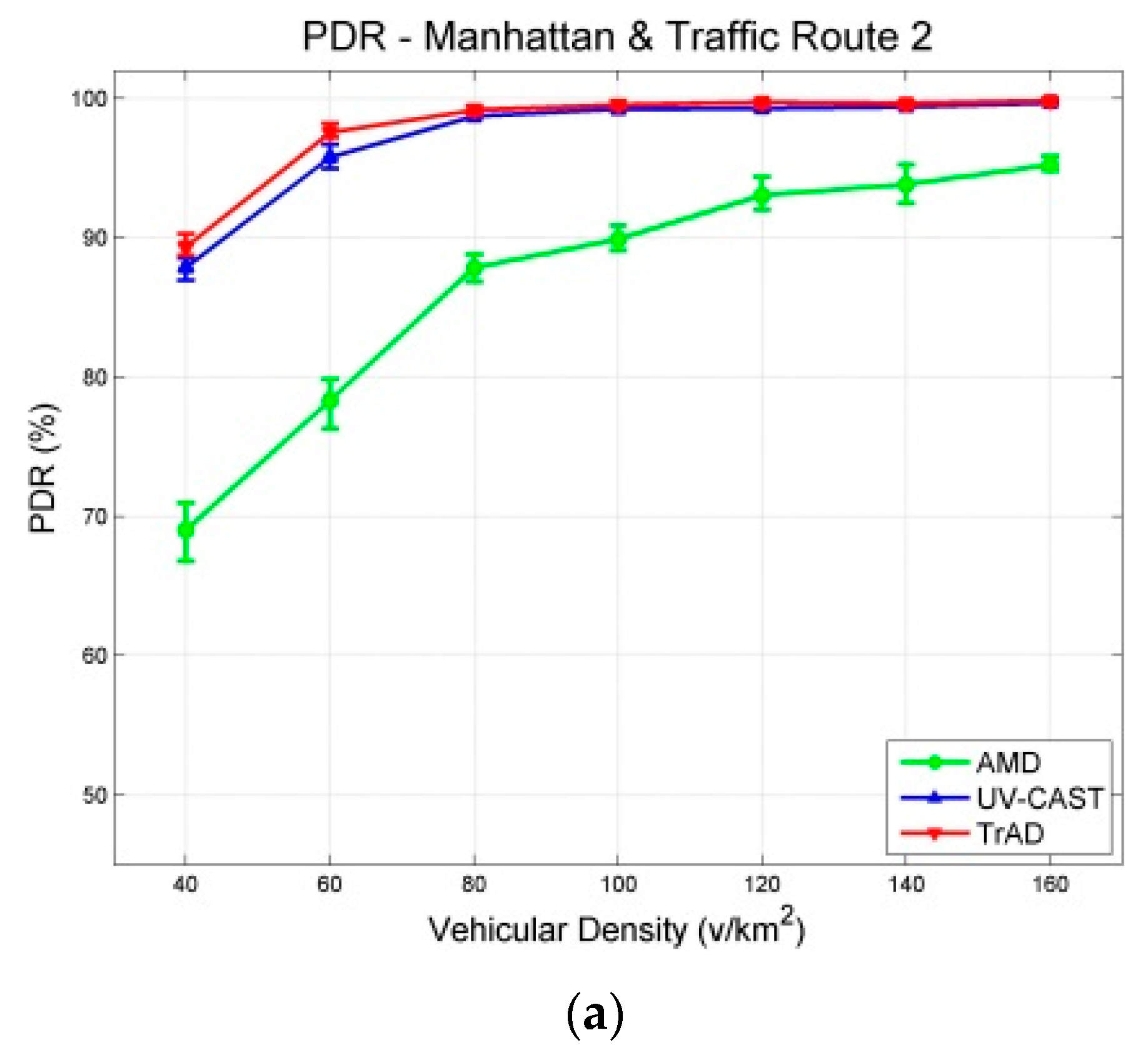
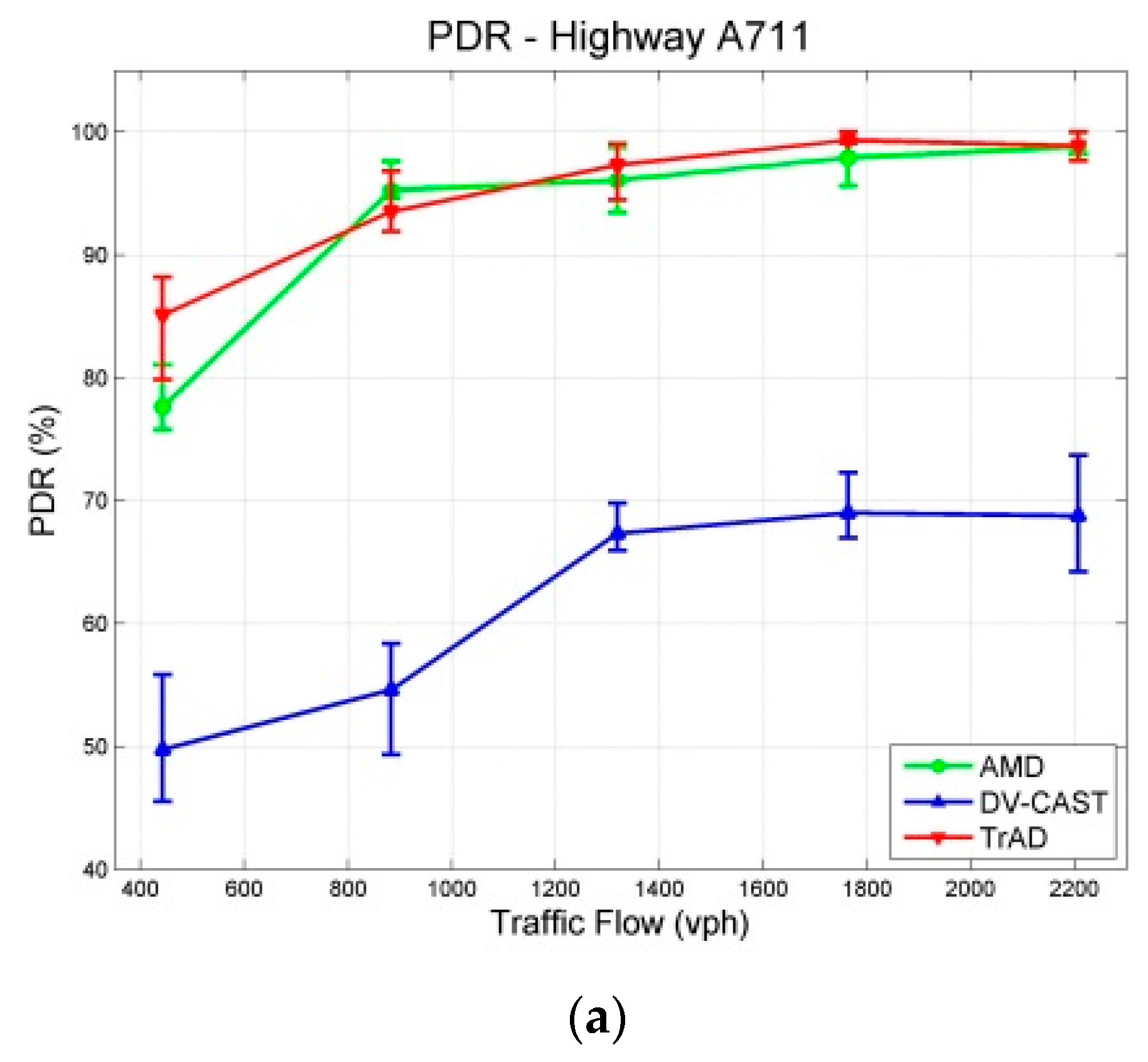
- Packet Delivery Ratio (PDR): It represents the average number of data messages received by the vehicles in the ROI as a percentage of the total number of data messages sent by the source node. It also can be called the coverage of data dissemination.
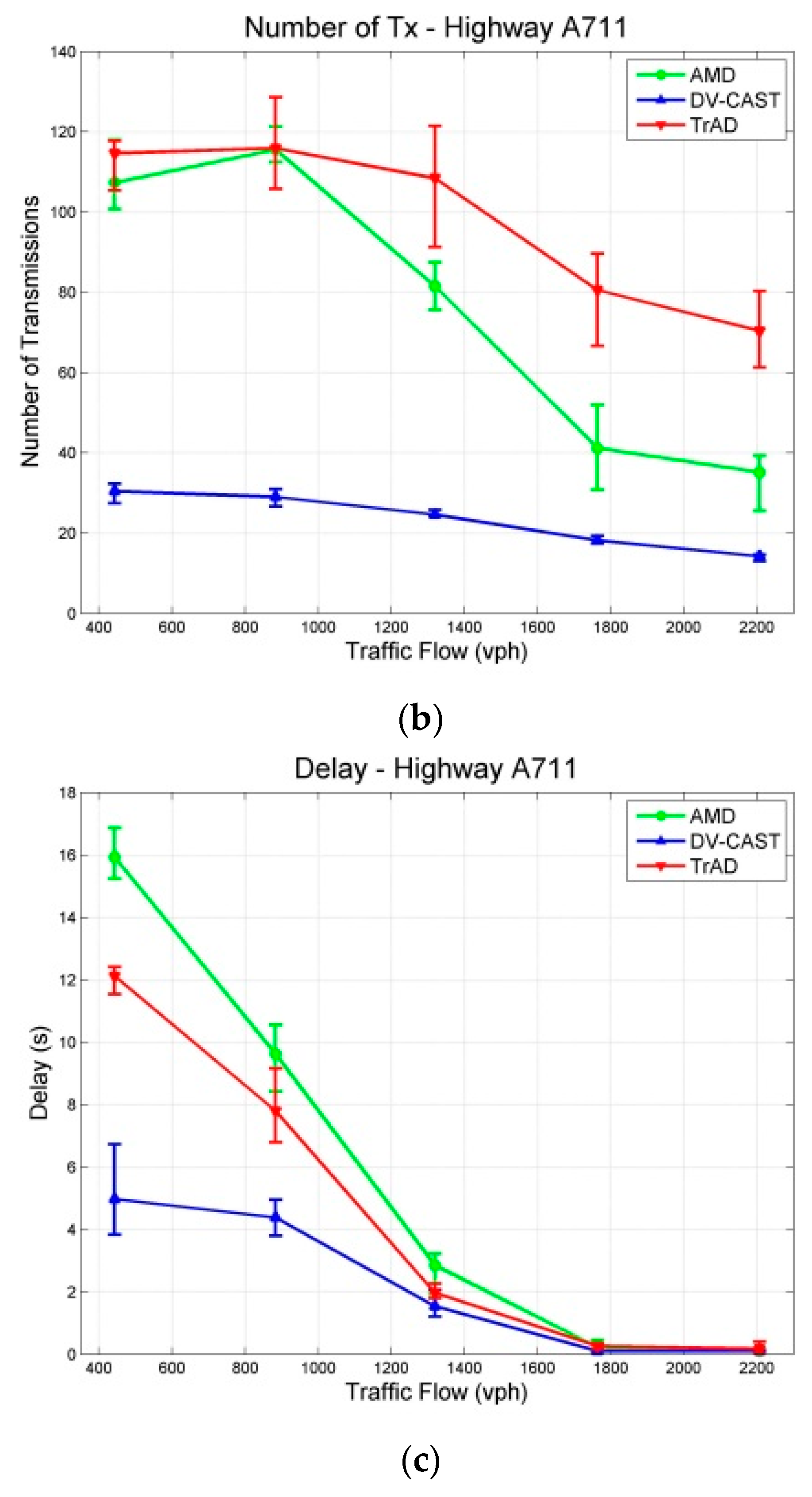
- Number of Transmissions: It is the total number of transmissions performed by the vehicles for broadcasting in the ROI during the whole simulation time.
- Delay: It is the average time interval between the sending of a data message by the source and its reception by the vehicles in the ROI.
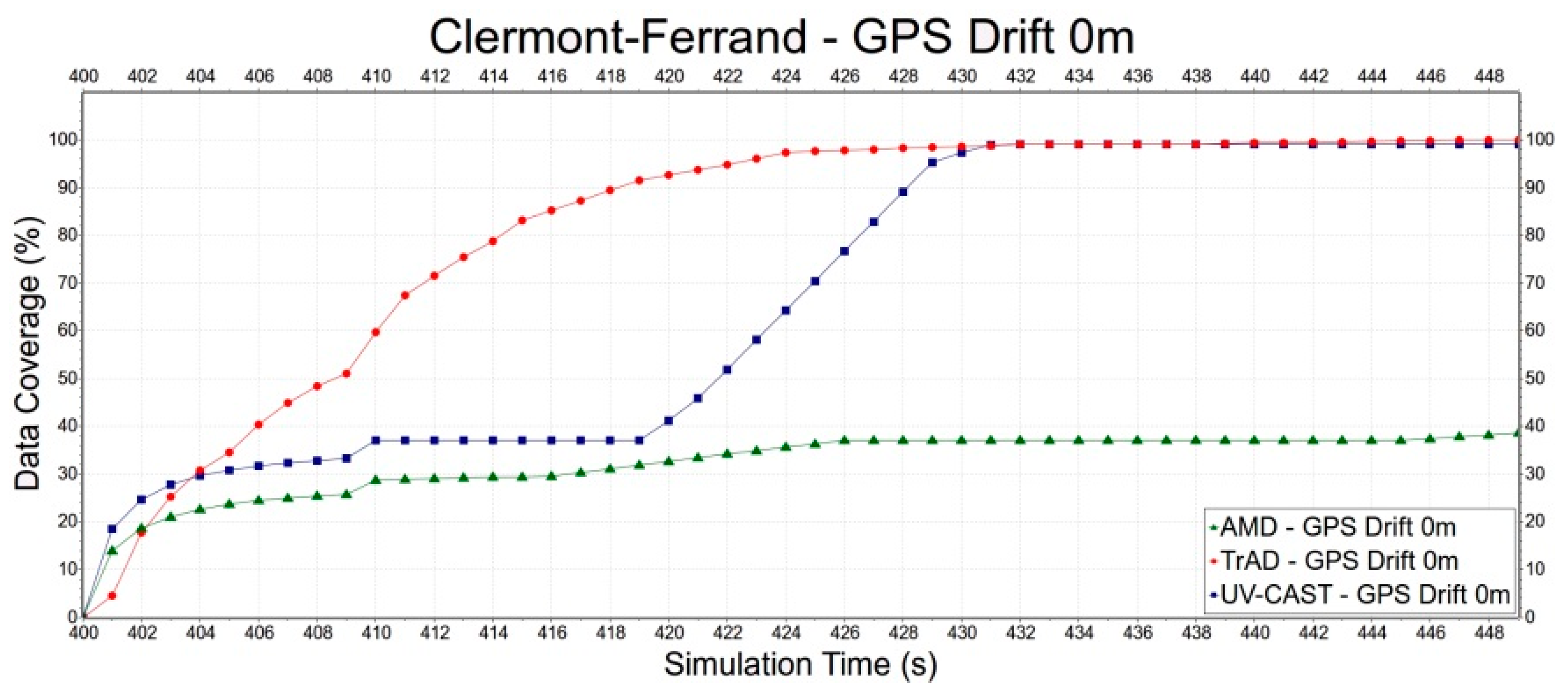
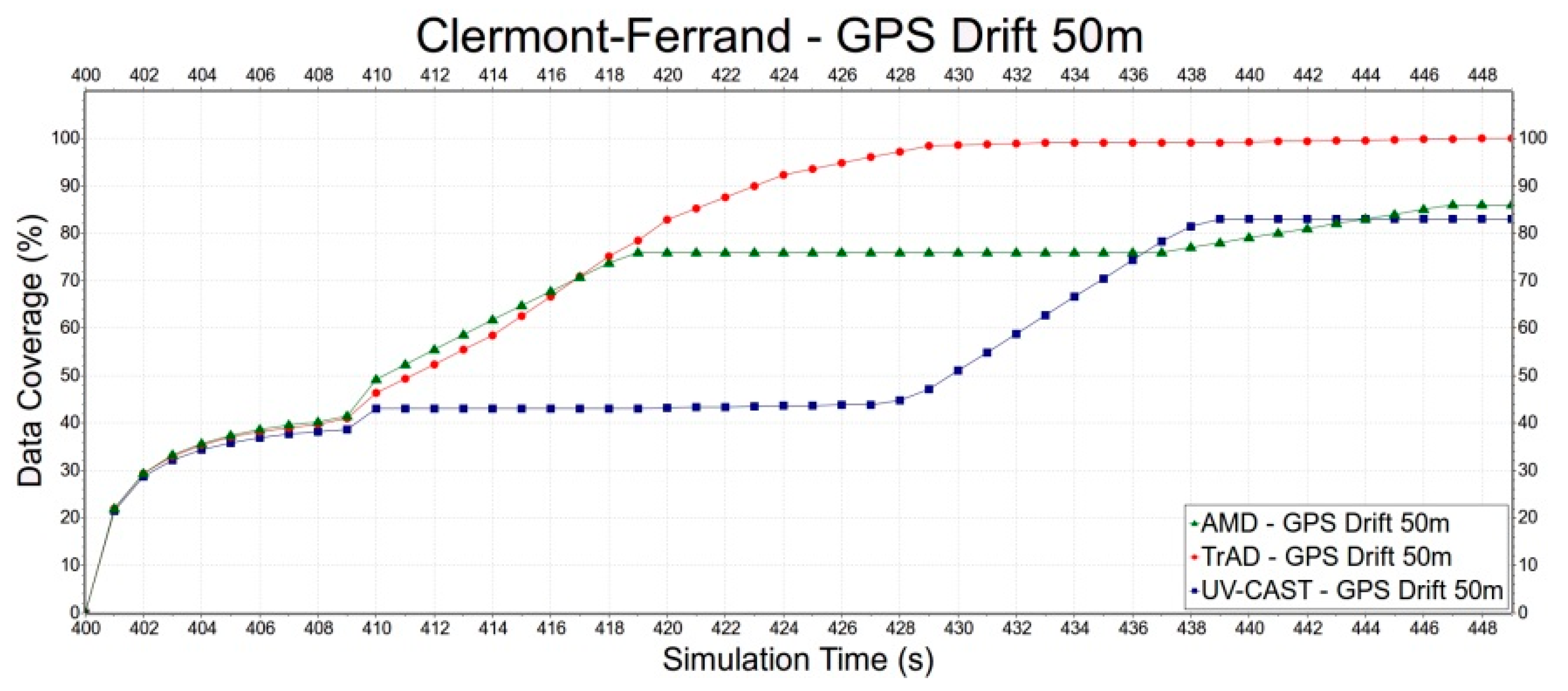
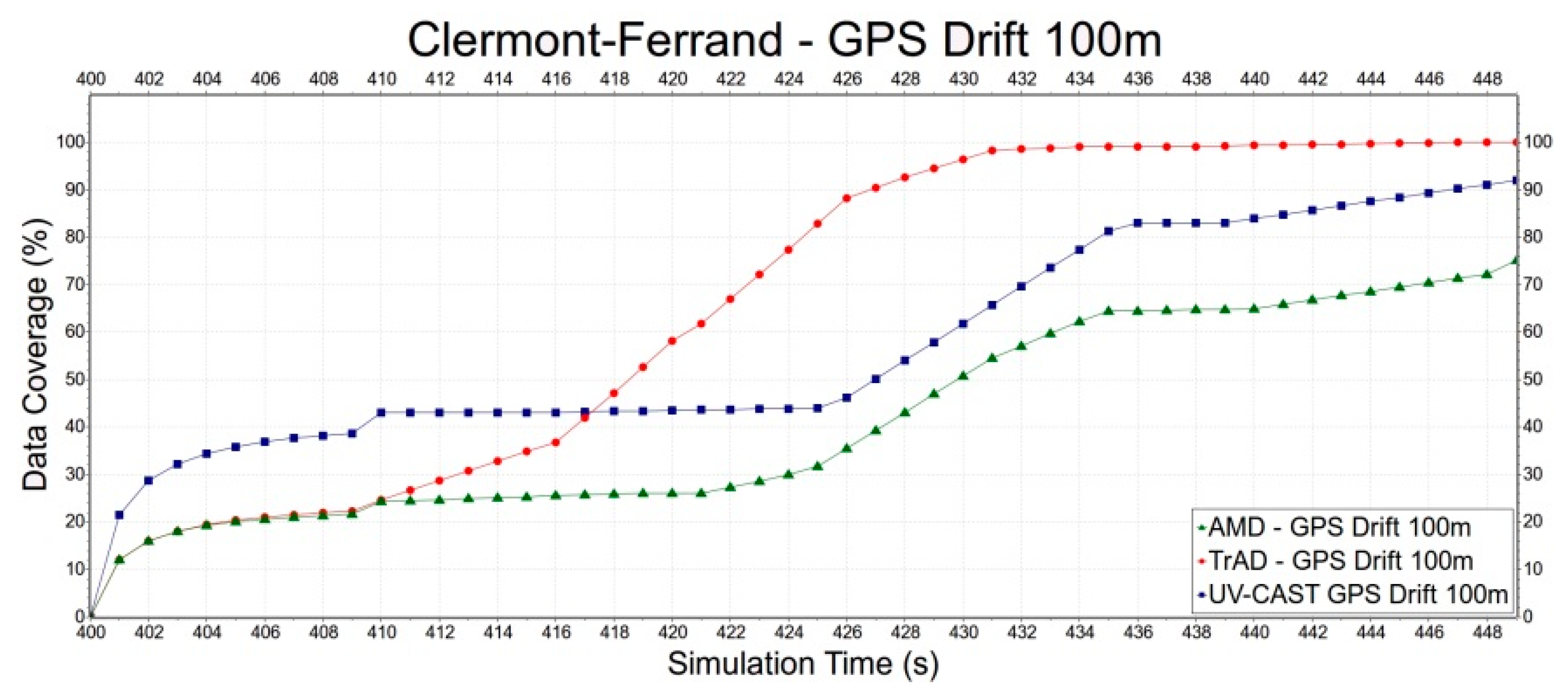
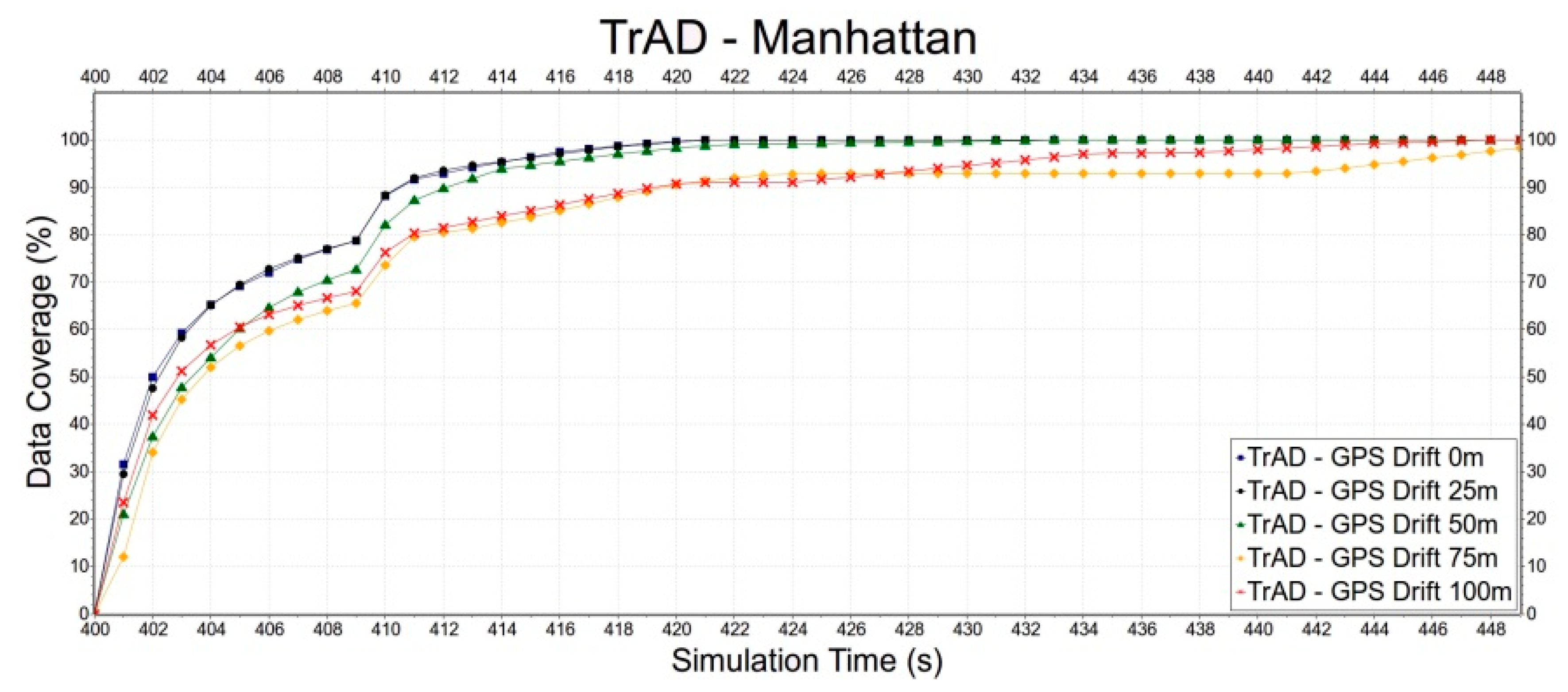
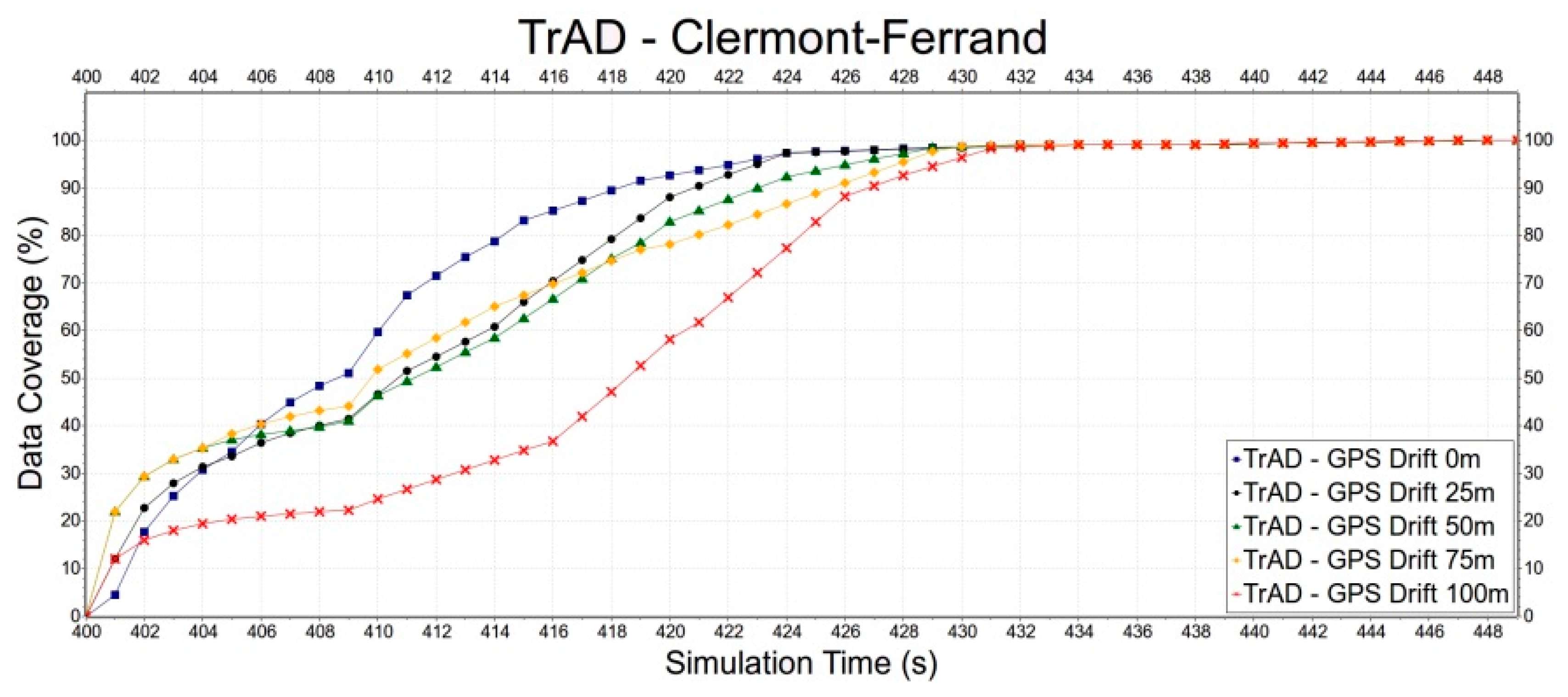
- Data Dissemination Speed: This metric represents how fast the data can be disseminated among vehicles in the ROI. To record this metric, the source only sends data message once, and then the simulation computes the increase of data coverage with time. If the data coverage increases greatly in a short time, which means the protocol achieves a high dissemination performance. This metric is mainly used to estimate the impact of GPS drift on the performance of protocols.
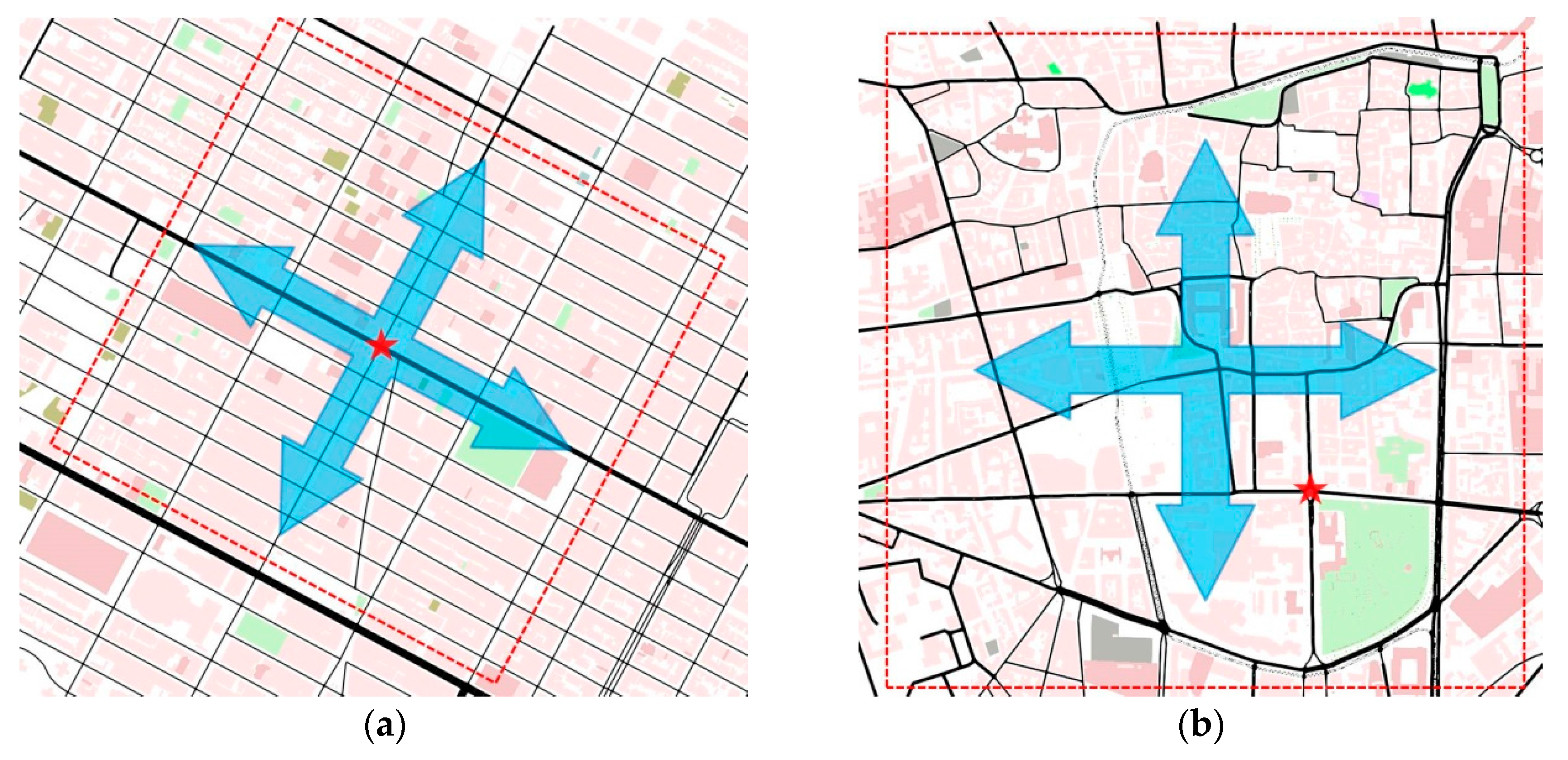
4.1. Different Urban Maps
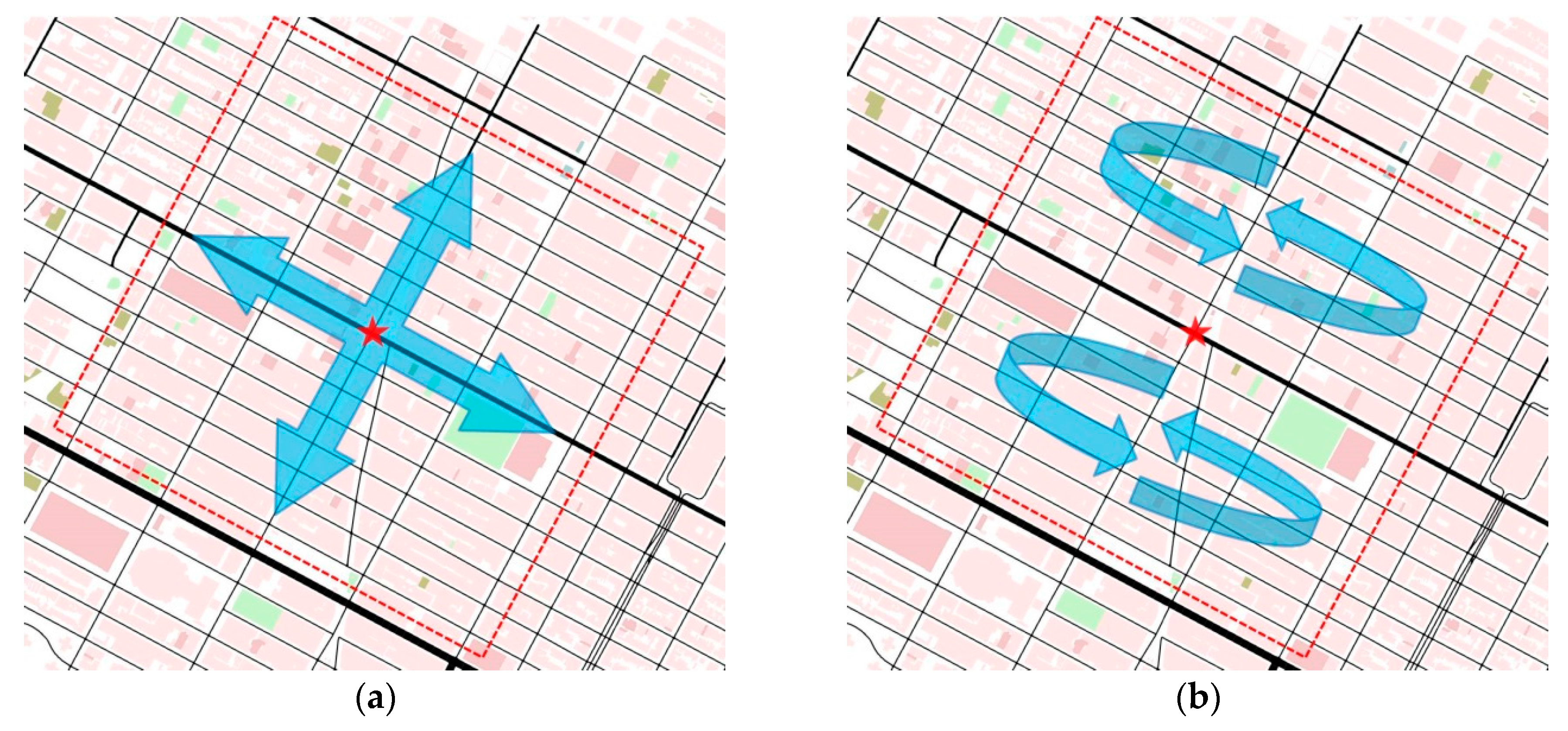
4.2. Different Traffic Routes
4.3. Network Density
4.3.1. Urban Scenarios
4.3.2. Highway Scenarios
4.4. GPS Drift
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lindberg, G. Calculating Transport Accident Costs, Final Report of the Expert Advisors to the High Level Group on Infrastructure Charging (Working Group 3); EU report; Swedish National Road and Transportation Research Institute: Borlänge, Sweden; Lund, Sweden, 1999. [Google Scholar]
- Victoria Transport Institute—Transportation Cost and Benefit Analysis. Available online: http://www.vtpi.org/tca/ (accessed on 12 June 2016).
- Karagiannis, G.; Altintas, O.; Ekici, E.; Heijenk, G.; Jarupan, B.; Lin, K.; Weil, T. Vehicular Networking: A Survey and Tutorial on Requirements, Architectures, Challenges, Standards and Solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616. [Google Scholar] [CrossRef]
- Caballero, P.; Caballero, C.; Molina, J.; Caballero, P.; Caballero, C.; Molina, J. Design and Implementation of an Application for Deploying Vehicular Networks with Smartphones. Int. J. Distrib. Sens. Netw. 2013. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Y.; Jiang, L.; Zhang, Y. Analysis of Downlink Heterogeneous Cellular Networks with Frequency Division: A Stochastic Geometry Way. In Proceedings of the 81st IEEE Vehicular Technology Conference (VTC Spring), Glasgow, Scotland, 11–14 May 2015; pp. 1–6.
- Berradj, A.; Mammeri, Z. Adaptive Contention Window Scheme to Improve Multi-Hop Broadcast in VANETs. In Proceedings of the 81st IEEE Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–6.
- Bai, F.; Krishnamachari, B. Exploiting the wisdom of the crowd: Localized, distributed information-centric VANETs (Topics in Automotive Networking). IEEE Commun. Mag. 2010, 48, 138–146. [Google Scholar] [CrossRef]
- Tonguz, O.K.; Wisitpongphan, N.; Bai, F. DV-CAST: A distributed vehicular broadcast protocol for vehicular ad hoc networks. IEEE Wirel. Commun. 2010, 17, 47–57. [Google Scholar] [CrossRef]
- Viriyasitavat, W.; Tonguz, O.K.; Bai, F. UV-CAST: An urban vehicular broadcast protocol. IEEE Commun. Mag. 2011, 49, 116–124. [Google Scholar] [CrossRef]
- Schwartz, R.S.; Scholten, H.; Havinga, P. A scalable data dissemination protocol for both highway and urban vehicular environments. EURASIP J. Wirel. Commun. Netw. 2013, 34, 2057–2071. [Google Scholar] [CrossRef]
- Villas, L.A.; Boukerche, A.; Maia, G.; Pazzi, R.W.; Loureiro, A.A.F. DRIVE: An efficient and robust data dissemination protocol for highway and urban vehicular ad hoc networks. Comput. Netw. 2014, 75, 381–394. [Google Scholar] [CrossRef]
- Akabane, A.T.; Villas, L.A.; Mauro Madeira, E.R. An adaptive solution for data dissemination under diverse road traffic conditions in urban scenarios. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1654–1659.
- Tseng, Y.-C.; Ni, S.-Y.; Chen, Y.-S.; Sheu, J.-P. The Broadcast Storm Problem in a Mobile Ad Hoc Network. Wirel. Netw. 2002, 8, 153–167. [Google Scholar] [CrossRef]
- Wisitpongphan, N.; Tonguz, O.K.; Parikh, J.S.; Mudalige, P.; Bai, F.; Sadekar, V. Broadcast storm mitigation techniques in vehicular ad hoc networks. IEEE Wirel. Commun. 2007, 14, 84–94. [Google Scholar] [CrossRef]
- Schwartz, R.S.; Barbosa, R.R.R.; Meratnia, N.; Heijenk, G.; Scholten, H. A directional data dissemination protocol for vehicular environments. Comput. Commun. 2011, 34, 2057–2071. [Google Scholar] [CrossRef]
- Torrent-Moreno, M.; Mittag, J.; Santi, P.; Hartenstein, H. Vehicle-to-Vehicle Communication: Fair Transmit Power Control for Safety-Critical Information. IEEE Trans. Veh. Technol. 2009, 58, 3684–3703. [Google Scholar] [CrossRef]
- Korkmaz, G.; Ekici, E.; Özgüner, F.; Özgüner, Ü. Urban Multi-hop Broadcast Protocol for Inter-vehicle Communication Systems. In Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphia, PA, USA, 1 October 2004; pp. 76–85.
- Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. Evaluating the impact of a novel message dissemination scheme for vehicular networks using real maps. Transp. Res. Part C Emerg. Technol. 2012, 25, 1–80. [Google Scholar] [CrossRef]
- Fogue, M.; Martinez, F.J.; Garrido, P.; Fiore, M.; Chiasserini, C.-F.; Casetti, C.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. Securing Warning Message Dissemination in VANETs Using Cooperative Neighbor Position Verification. IEEE Trans. Veh. Technol. 2015, 64, 2538–2550. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, B.; Shi, X.; Wang, Y. A Survey of Social-Based Routing in Delay Tolerant Networks: Positive and Negative Social Effects. IEEE Commun. Surv. Tutor. 2013, 15, 387–401. [Google Scholar] [CrossRef]
- Cao, Y.; Sun, Z. Routing in Delay/Disruption Tolerant Networks: A Taxonomy, Survey and Challenges. IEEE Commun. Surv. Tutor. 2013, 15, 654–677. [Google Scholar] [CrossRef]
- Sommer, C.; Eckhoff, D.; Dressler, F. IVC in Cities: Signal Attenuation by Buildings and How Parked Cars Can Improve the Situation. IEEE Trans. Mob. Comput. 2014, 13, 1733–1745. [Google Scholar] [CrossRef]
- Sommer, C.; Joerer, S.; Segata, M.; Tonguz, O.K.; Cigno, R.L.; Dressler, F. How Shadowing Hurts Vehicular Communications and How Dynamic Beaconing Can Help. IEEE Trans. Mob. Comput. 2015, 14, 1411–1421. [Google Scholar] [CrossRef]
- Lochert, C.; Mauve, M.; Füßler, H.; Hartenstein, H. Geographic Routing in City Scenarios. SIGMOBILE Mob. Comput. Commun. Rev. 2005, 9, 69–72. [Google Scholar] [CrossRef]
- European Telecommunications Standards Institute. Intelligent Transport Systems (ITS); Decentralized Congestion Control Mechanisms for Intelligent Transport Systems Operating in the 5 GHz Range; Access layer Part. TS 102 687-V1.1.1; European Telecommunications Standards Institute: Nice, France, 2011. [Google Scholar]
- Joerer, S.; Bloessl, B.; Segata, M.; Sommer, C.; Lo Cigno, R.; Jamalipour, A.; Dressler, F. Enabling Situation Awareness at Intersections for IVC Congestion Control Mechanisms. IEEE Trans. Mob. Comput. 2015, 15, 1674–1685. [Google Scholar] [CrossRef]
- Tielert, T.; Jiang, D.; Hartenstein, H.; Delgrossi, L. Joint Power/Rate Congestion Control Optimizing Packet Reception in Vehicle Safety Communications. In Proceeding of the 10th ACM International Workshop on Vehicular Inter-networking, Systems, and Applications, Taipei, Taiwan, 25–28 June 2013; pp. 51–60.
- Sommer, C.; Joerer, S.; Segata, M.; Tonguz, O.; Cigno, R.L.; Dressler, F. How shadowing hurts vehicular communications and how dynamic beaconing can help. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 110–114.
- Koubek, M.; Rea, S.; Pesch, D. Reliable Delay Constrained Multihop Broadcasting in VANETs. EURASIP J. Adv. Signal Process. 2010, 2010, 753256. [Google Scholar] [CrossRef]
- Tielert, T.; Jiang, D.; Chen, Q.; Delgrossi, L.; Hartenstein, H. Design methodology and evaluation of rate adaptation based congestion control for Vehicle Safety Communications. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Amsterdam, The Netherlands, 14–16 November 2011; pp. 116–123.
- Kenney, J.B.; Bansal, G.; Rohrs, C.E. LIMERIC: A Linear Message Rate Control Algorithm for Vehicular DSRC Systems. In Proceedings of the 8th ACM International Workshop on Vehicular Inter-networking, Las Vegas, NV, USA, 23 September 2011; pp. 21–30.
- Fallah, Y.P.; Huang, C.L.; Sengupta, R.; Krishnan, H. Analysis of Information Dissemination in Vehicular Ad-Hoc Networks With Application to Cooperative Vehicle Safety Systems. IEEE Trans. Veh. Technol. 2011, 60, 233–247. [Google Scholar] [CrossRef]
- Rappaport, T. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001; p. 104. [Google Scholar]
- Sjöberg, K.; Karedal, J.; Moe, M.; Kristiansen, Ø.; Søråsen, R.; Uhlemann, E.; Tufvesson, F.; Evensen, K.; Ström, E.G. Measuring and using the RSSI of IEEE 802.11p. In Proceedings of the 17th World Congress on Intelligent Transport Systems, Busan, Korea, October 2010.
- Sommer, C.; Eckhoff, D.; German, R.; Dressler, F. A computationally inexpensive empirical model of IEEE 802.11p radio shadowing in urban environments. In Proceedings of the 8th International Conference on Wireless On-Demand Network Systems and Services (WONS), Bardonecchia, Italy, 26–28 January 2011; pp. 84–90.
- Kuo, W.-H.; Fang, S.-H. The impact of GPS positioning errors on the hop distance in Vehicular Adhoc Networks (VANETs). In Proceedings of the 2013 International Conference on Computing, Networking and Communications (ICNC), San Diego, CA, USA, 28–31 January 2013; pp. 51–55.
- Caballero, C.; Molina, J.; Hernández-Serrano, J.; León, O.; Soriano-Ibañez, M. Providing k-anonymity and revocation in ubiquitous VANETs. Ad Hoc Netw. 2016, 36, 482–494. [Google Scholar] [CrossRef]
- Bariah, L.; Shehada, D.; Salahat, E.; Yeun, C.Y. Recent Advances in VANET Security: A Survey. In Proceedings of the 82nd IEEE Vehicular Technology Conference (VTC Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–7.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Layer | Frequency band | 5.89 GHz |
| Bandwidth | 10 MHz | |
| Tx power | 300 mW | |
| Receiver sensitivity | −100 dBm | |
| FSPL exponent α | 3.0 | |
| Thermal noise | −110 dBm | |
| Radio range (Friis) | ~366 m | |
| Link Layer | Bit rate | 6 Mbit/s |
| CW | [15, 1023] | |
| Slot time | 13 μs | |
| SIFS | 32 μs | |
| DIFS | 58 μs | |
| Data Broadcasting | Broadcast frequency | 0.5 Hz |
| Data size | 2312 bytes | |
| Beaconing | Beacon frequency | 1 Hz |
| Beacon size | 378 bytes | |
| Message list entries | 40 | |
| TrAD | 5 ms | |
| 25 | ||
| ~366 m | ||
| AMD | 5 ms | |
| 1 | ||
| DIFS | ||
| UV-CAST | 500 ms | |
| DV-CAST | 5 ms | |
| 5 | ||
| 120 s | ||
| 120 s |
| City Map | Clermont-Ferrand | Manhattan |
|---|---|---|
| Total lanes | 366 | 166 |
| Total junctions | 137 | 86 |
| Avg. street length | 97.39 | 151.45 |
| Avg. lanes/street | 1.62 | 1.11 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, B.; Hou, K.M.; Zhou, H. The Traffic Adaptive Data Dissemination (TrAD) Protocol for both Urban and Highway Scenarios. Sensors 2016, 16, 920. https://doi.org/10.3390/s16060920
Tian B, Hou KM, Zhou H. The Traffic Adaptive Data Dissemination (TrAD) Protocol for both Urban and Highway Scenarios. Sensors. 2016; 16(6):920. https://doi.org/10.3390/s16060920
Chicago/Turabian StyleTian, Bin, Kun Mean Hou, and Haiying Zhou. 2016. "The Traffic Adaptive Data Dissemination (TrAD) Protocol for both Urban and Highway Scenarios" Sensors 16, no. 6: 920. https://doi.org/10.3390/s16060920