
Instantaneous Observability of Tightly Coupled SINS/GPS during Maneuvers

Abstract
:1. Introduction
- (1)
- A novel instantaneous observability matrix (IOM) based on a reconstructed psi-angle model is proposed.
- (2)
- An arbitrary translational/angle maneuver is modeled in a sufficient small time interval; this idea is roused by strapdown inertial navigation system mechanization.
2. The Reconstructed Model
3. Instantaneous Observability Matrix
4. Instantaneous Observability Analysis
4.1. Stationary or Constant Velocity
4.2. Maneuvers
4.2.1. Angle Maneuver
4.2.2. Translational Maneuver
5. Simulations and Results
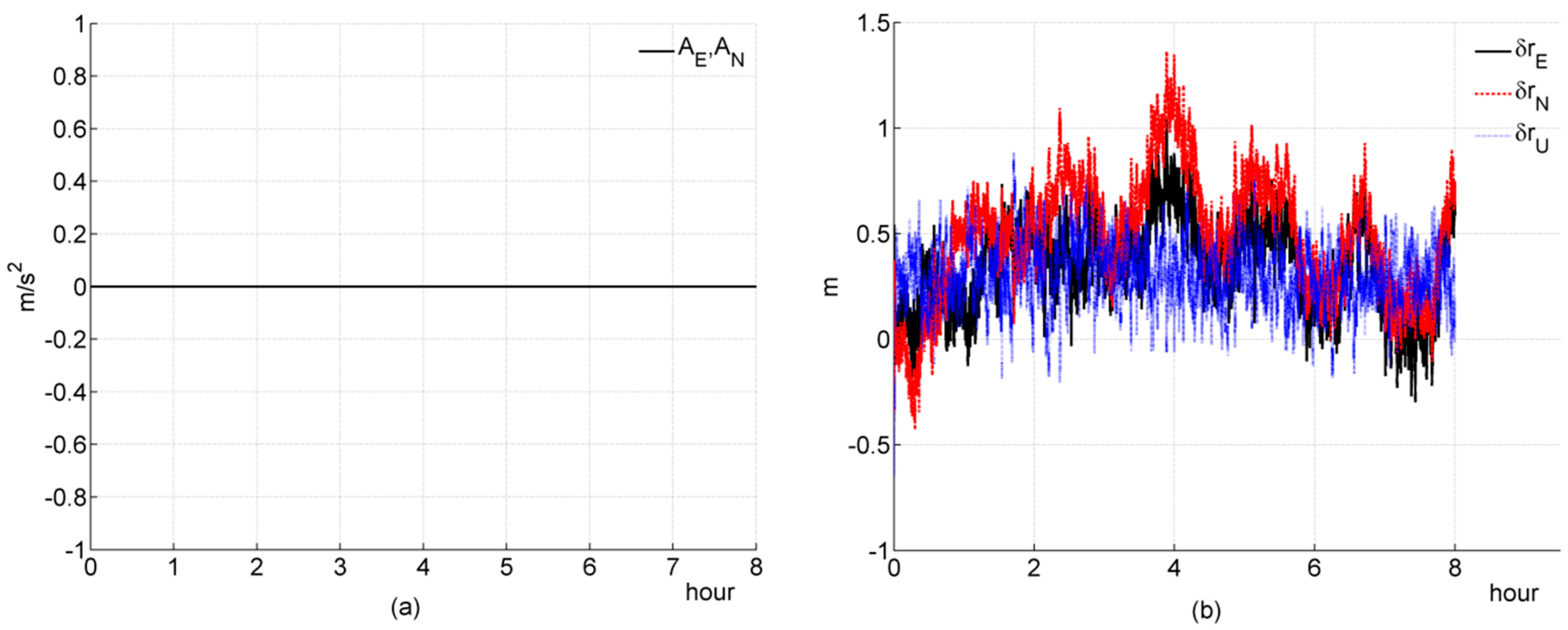
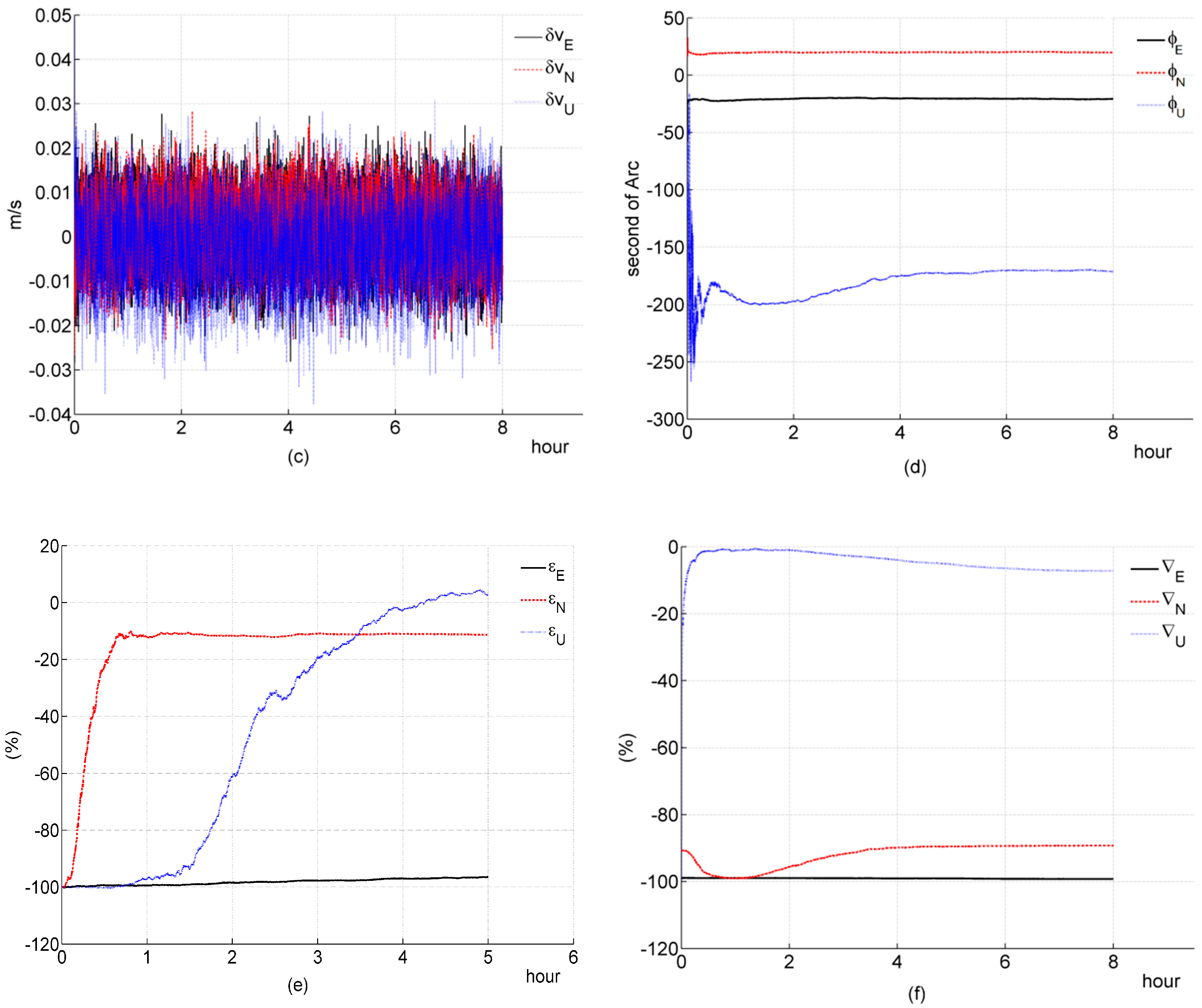
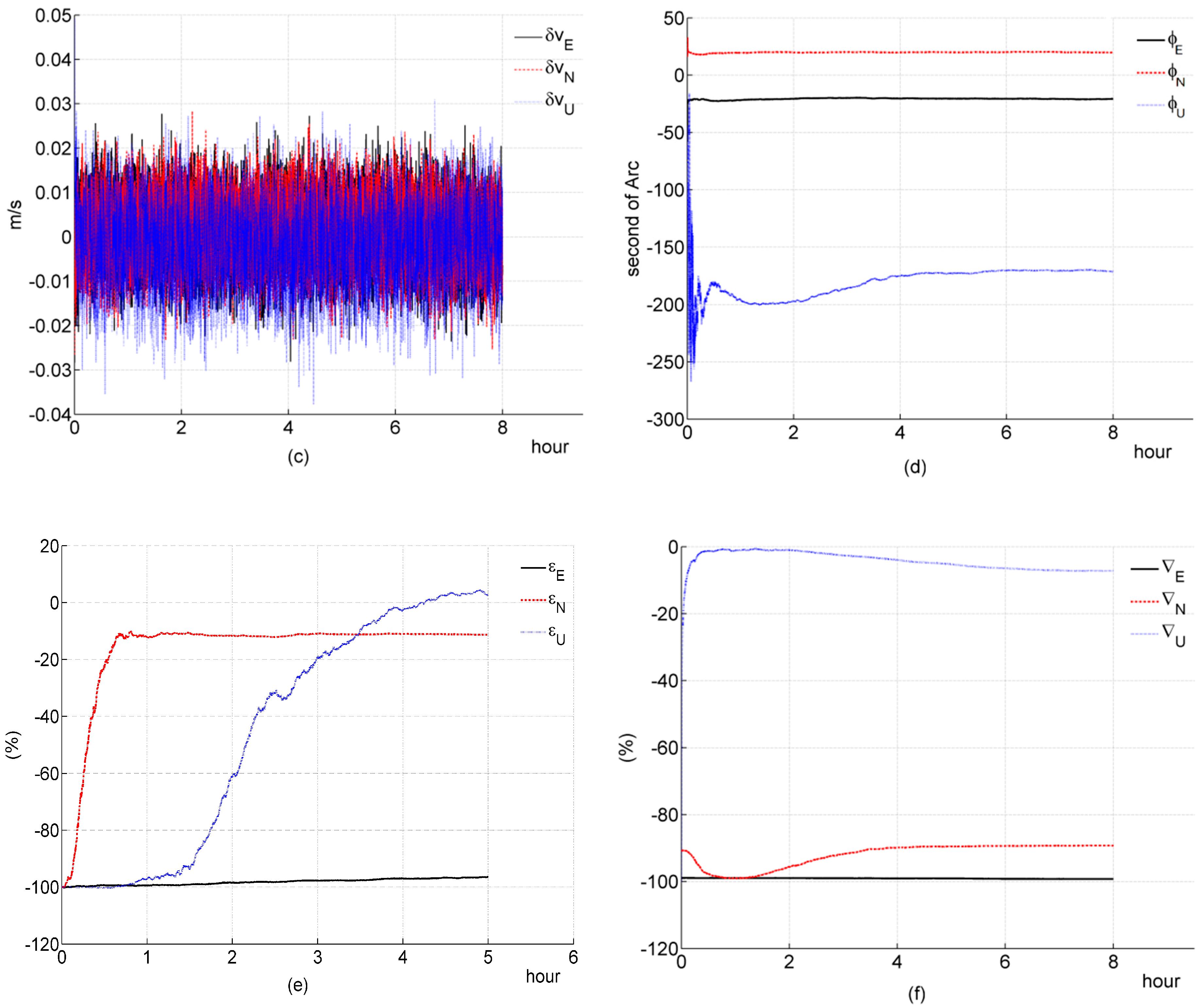
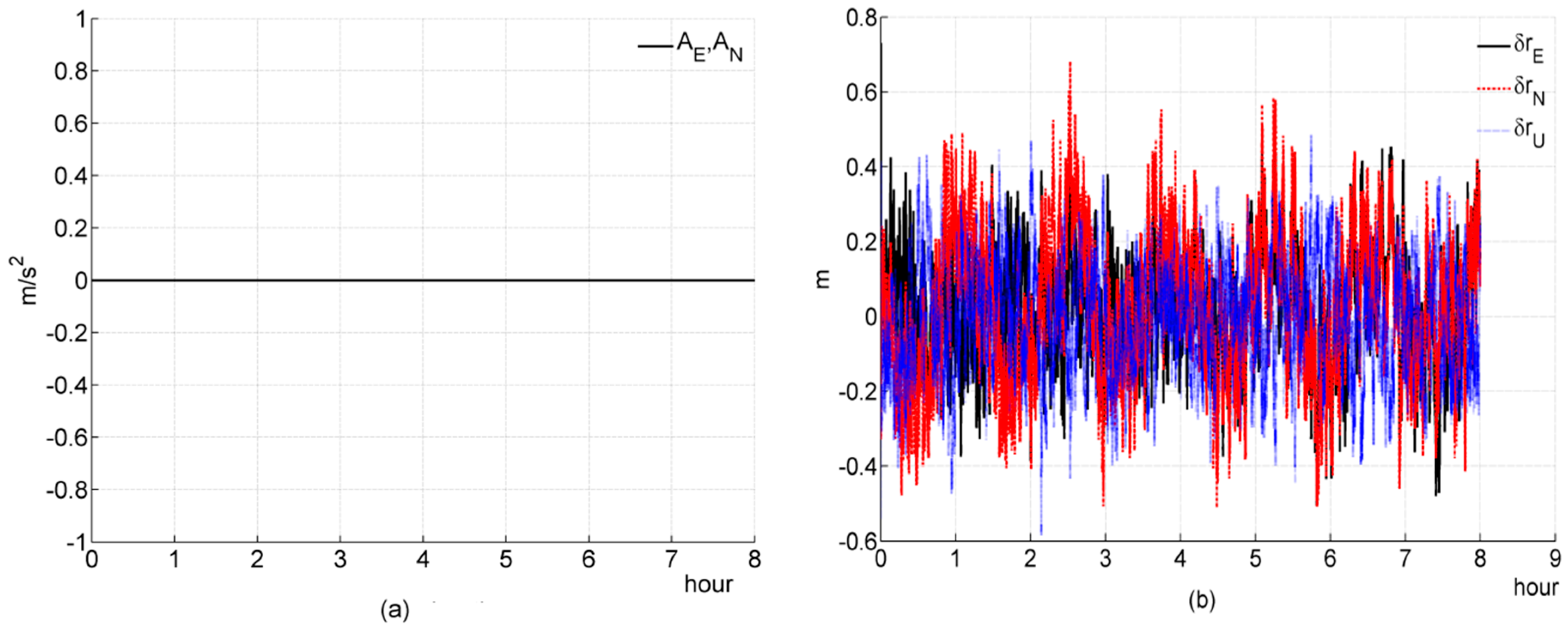
5.1. Simulation 1: Stationary
(a) Three-channnel system
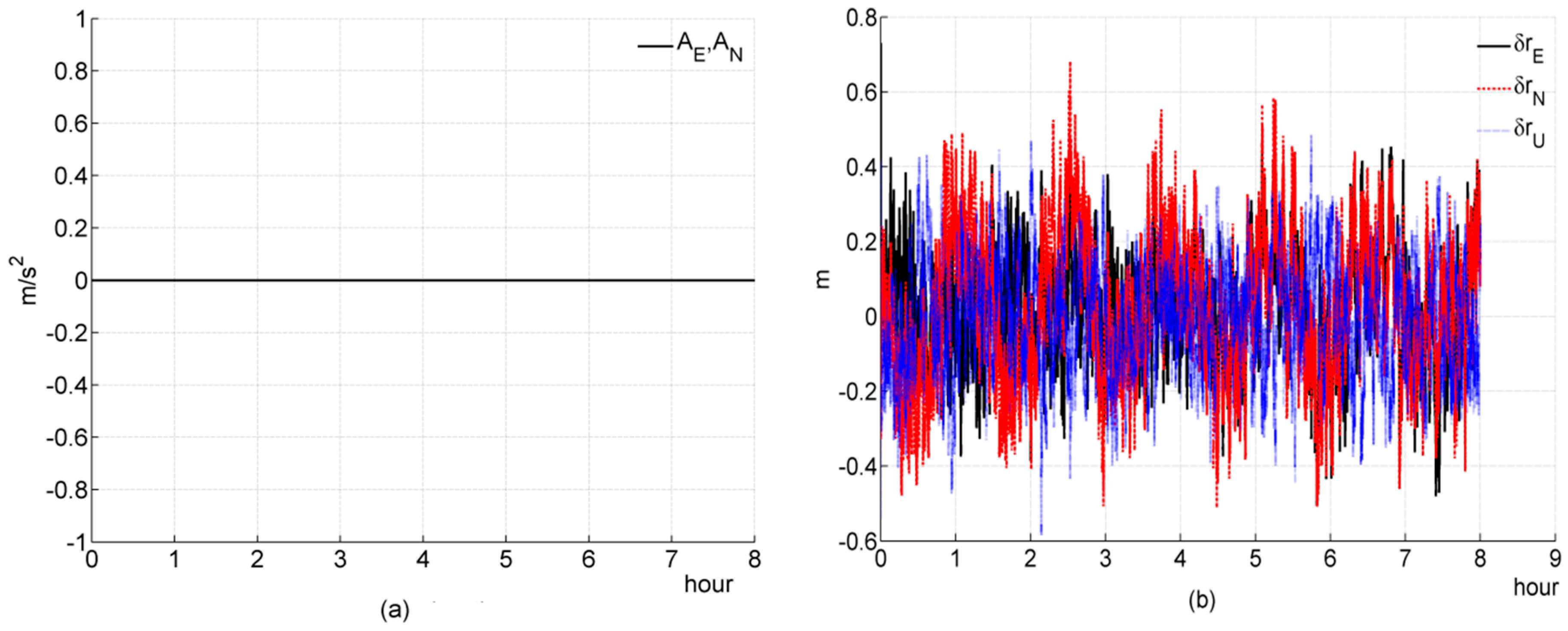
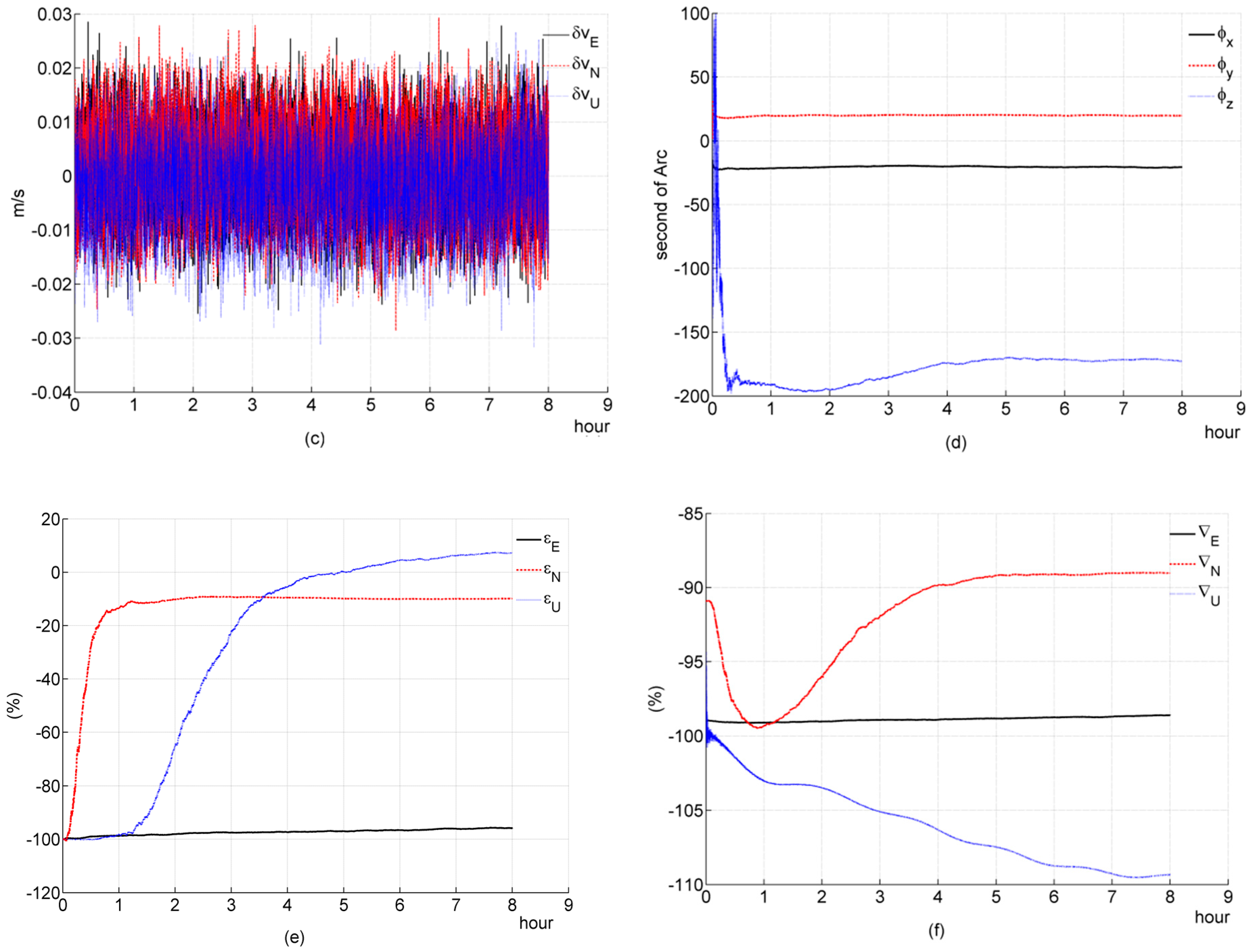
(b) Two-channnel system
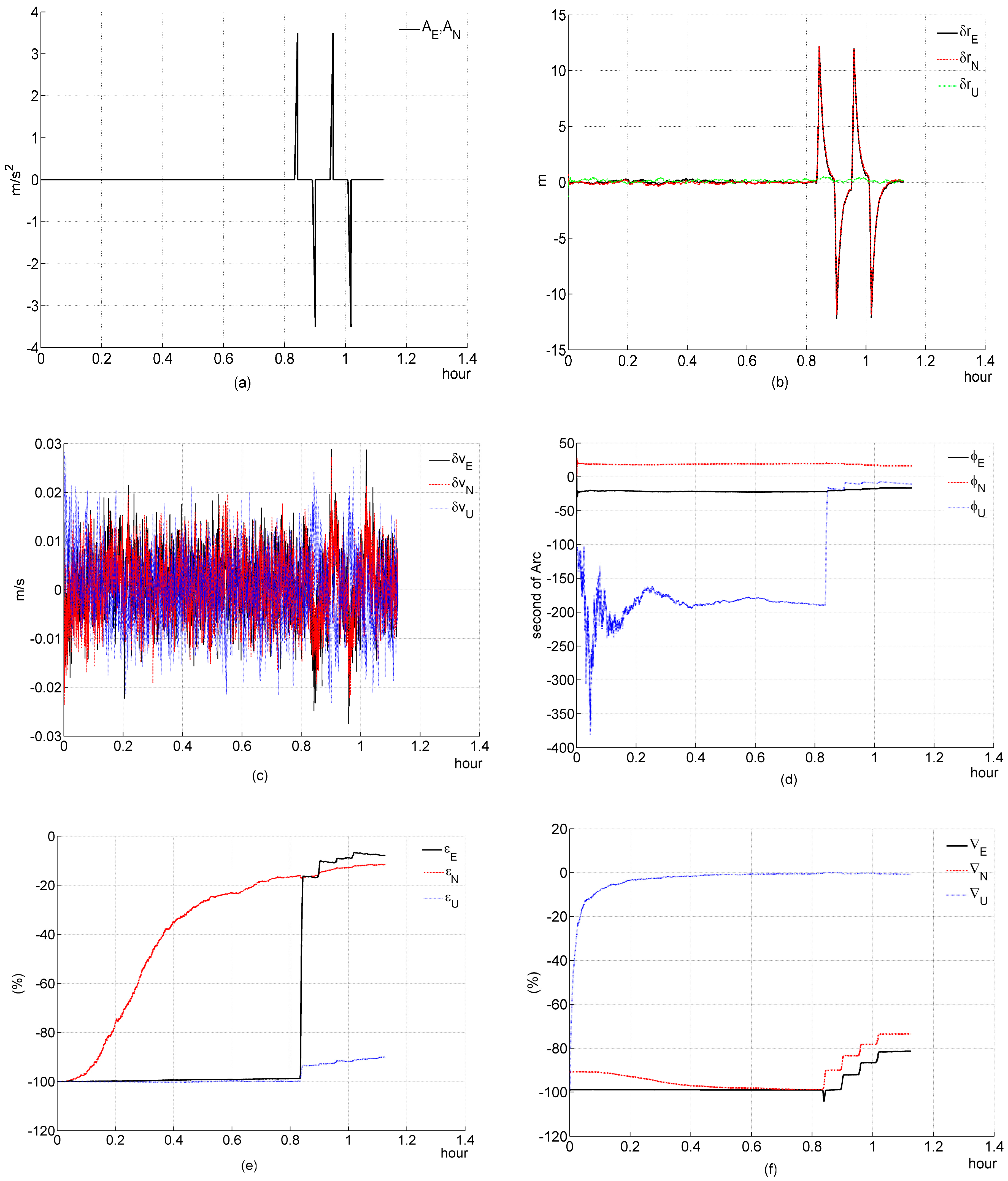
5.2. Simulation 2: Translational Maneuver
(a) Three-channnel system
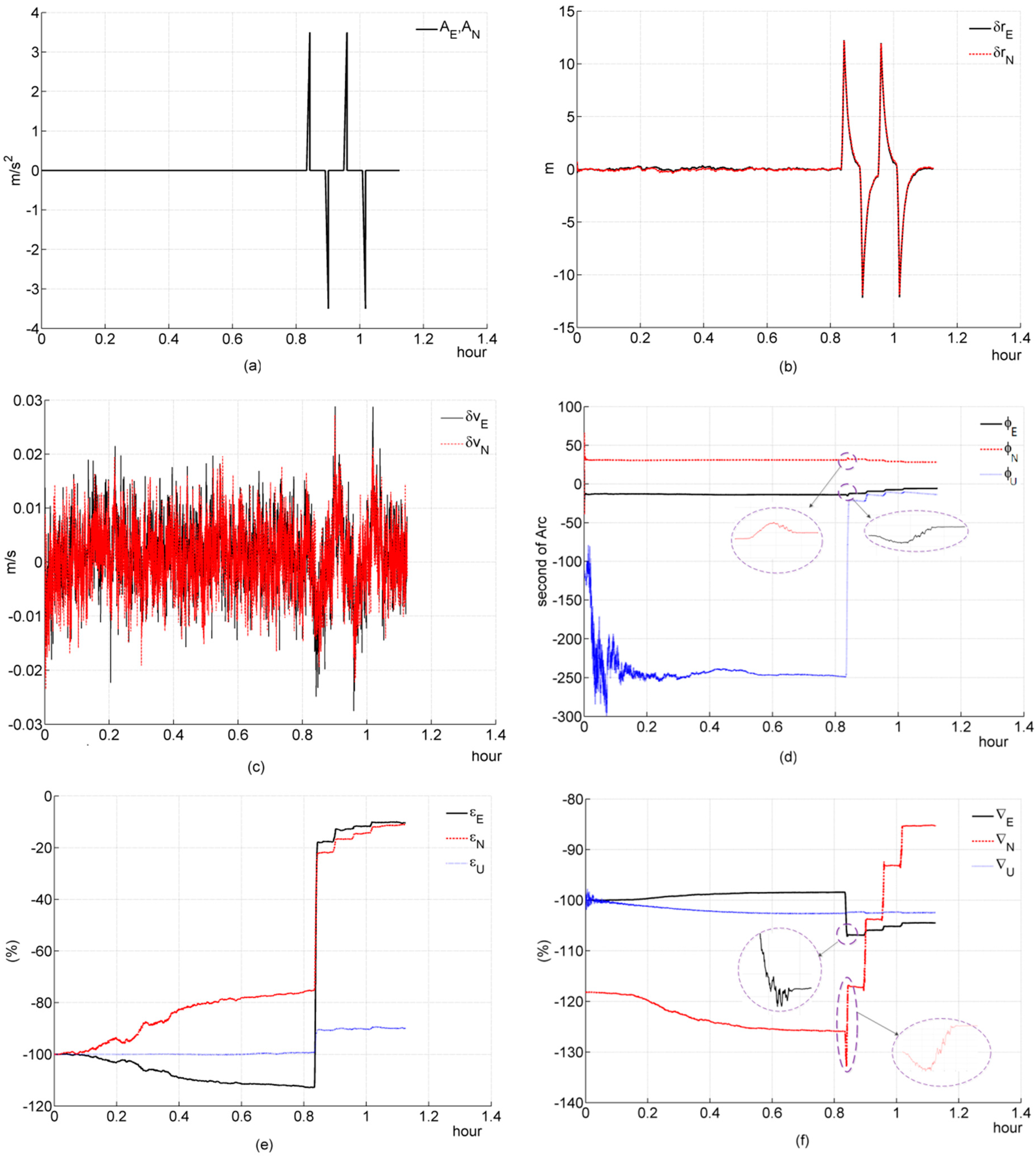
(b) Two-channnel system
5.3. Simulation 3: Angle Maneuver
(a) Three-channnel system
(b) Two-channnel system
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| Abbreviations: | |
| SINS | strapdown inertial navigation system; |
| GPS | global position system; |
| IOM | instantaneous observability matrix; |
| EKF | Extended Kalman Filter; |
| CKF | cubature Kalman filter; |
| UKF | Unscented Kalman filter; |
| symbol: | |
| -frame | arbitrary coordinate frames; |
| direction cosine matrix that transforms a vector from its -frame projection form to its -frame projection form; | |
| identity matrix; | |
| arbitrary vector without specific coordinate frame designation; | |
| column matrix with elements equal to the projection of on -frame axis, and ; | |
| skew symmetric(or cross product)form of
, represented by the square matrix, , matrix product of with another -frame vectors equals the cross product of with the vector in the -frame; | |
| norm of ; | |
| angular rate of -frame relative to -frame; | |
| the position-error vector of a SINS; | |
| the velocity-error vector of a SINS; | |
| the attitude-error vector of a SINS; | |
| the constant-bias vector of an accelerometer; | |
| the constant-drift vector of a gyroscope; | |
| altitude; | |
| latitude; | |
| computed altitude; | |
| computed latitude; | |
| earth radius; | |
| Earth rotating rate; | |
| The pseudorange measurement from the SINS to the i-th satellite; | |
| The deltarange measurement from the SINS to the i-th satellite; | |
| The i-th satellite’s position vector relative to earth center; | |
| The i-th satellite’s velocity vector relative to earth; | |
| The position vector updated by navigation computer; | |
| The velocity vector updated by navigation computer; | |
| The coordinate frames are defined as follows: | |
| navigation frame | the navigation frame has its z axis parallel to the upward vertical at the local Earth surface reference position location, x-axis is parallel to the EAST direction, y-axis is parallel to the NORTH direction; |
| t-frame | navigation frame at the true Earth surface reference position location, we denote as ; |
| c-frame | navigation frame at the computed Earth surface reference position location; |
| b-frame | body frame; |
| i-frame | inertial frame; |
| e-frame | earth frame, it is the Earth fixed coordinate used for position location definition; its z-axis is parallel to the polar axis; |
| p-frame | platform frame. |
References
- Tang, Y.; Wu, Y.; Wu, M.; Wu, W. INS/GPS integration: Global observability analysis. IEEE Trans. Veh. Technol. 2009, 58, 1129–1142. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, H.; Wu, M.; Hu, X.; Hu, D. Observability of strapdown INS alignment: A global perspective. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 78–102. [Google Scholar]
- Yoo, Y.M.; Park, J.G.; Park, C.G. A theoretical approach to observability analysis of the SDINS/GPS in maneuvering with horizontal constant velocity. Int. J. Control Autom. Syst. 2012, 10, 298–307. [Google Scholar] [CrossRef]
- Lee, M.H.; Park, W.C.; Lee, K.S.; Hong, S.; Park, H.G.; Chun, H.H.; Harashima, F. Observability Analysis Techniques on Inertial Navigation Systems. J. Syst. Des. Dyn. 2012, 6, 28–44. [Google Scholar] [CrossRef]
- Klein, I.; Diamant, R. Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV. Sensors 2015, 15, 26818–26837. [Google Scholar] [CrossRef] [PubMed]
- Wendel, J.; Metzger, J.; Moenikes, R.; Maier, A.; Trommer, G.F. A performance comparison of tightly coupled GPS/INS navigation systems based on extended and sigma point Kalman filters. Navigation 2006, 53, 21–31. [Google Scholar] [CrossRef]
- Li, Y.; Rizos, C.; Wang, J.; Mumford, P.; Ding, W. Sigma-Point Kalman Filtering for Tightly Coupled GPS/INS Integration. Navigation 2008, 55, 167–177. [Google Scholar] [CrossRef]
- Goshen-Meskin, D.; Bar-Itzhack, I.Y. Observability Analysis of Piece-Wise Constant Systems-Part 1: Theory. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 1056–1068. [Google Scholar] [CrossRef]
- Goshen-Meskin, D.; Bar-Itzhack, I.Y. Observability analysis of piece-wise constant systems. II. Application to inertial navigation in-flight alignment [military applications]. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 1068–1075. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. IEEE Proc. 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Lu, J.; Xie, L.; Zhang, C.; Wang, Y. An improved determinant method of observability and its degree analysis[C]. In Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer, Shengyang, China, 20–22 December 2013.
- Hong, S.; Chun, H.H.; Kwon, S.H.; Man, H.L. Observability measures and their application to GPS/INS. IEEE Trans. Veh. Technol. 2008, 57, 97–106. [Google Scholar] [CrossRef]
- Hong, S.; Lee, M.H.; Chun, H.H.; Hwon, S.H. Observability of error states in GPS/INS integration. IEEE Trans. Veh. Technol. 2005, 54, 731–743. [Google Scholar] [CrossRef]
- Li, M.; Wang, D.; Huang, X. Study on the observability analysis based on the trace of error covariance matrix for spacecraft autonomous navigation. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation, Hangzhou, China, 12–14 June 2013.
- Rhee, I.; Abdel-Hafez, M.F.; Speyer, J.L. Observability of an integrated GPS/INS during maneuvers. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 526–535. [Google Scholar] [CrossRef]
- Gao, Z. Inertial Navigation System Technology; Tsinghua University Press: Beijing, China, 2012. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Savage, P.G. Strapdown inertial navigation integration algorithm design part 2: Velocity and position algorithms. J. Guid. Control Dyn. 1998, 21, 208–221. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Execution Time () | Motion | (m/s3) |
|---|---|---|
| The other time | stationary | [0, 0, 0] |
| [1200 s, 1235 s], [1550 s, 1585 s], | slope | [0.1, 0.1, 0]T |
| [1375 s, 1410 s], [1725 s, 1760 s]. | acceleration | −[0.1, 0.1, 0]T |
| Execution Time () | Motion | (rad/s2) |
|---|---|---|
| The other time | stationary | [0, 0, 0] |
| [1000 s, 1060 s]; [1420 s, 1480 s]; [1720 s, 1780 s]; [2140 s, 2200 s]. | tri-angle velocity | [0, 0, 2.77 × 10−3]T |
| [1060 s, 1120 s]; [1780 s, 1840s]; [1360 s, 1420s]; [2080 s, 2140 s]. | −[0, 0, 2.77 × 10−3]T |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, J.; Yu, F.; Lan, H.; Dong, Q. Instantaneous Observability of Tightly Coupled SINS/GPS during Maneuvers. Sensors 2016, 16, 765. https://doi.org/10.3390/s16060765
Jiang J, Yu F, Lan H, Dong Q. Instantaneous Observability of Tightly Coupled SINS/GPS during Maneuvers. Sensors. 2016; 16(6):765. https://doi.org/10.3390/s16060765
Chicago/Turabian StyleJiang, Junxiang, Fei Yu, Haiyu Lan, and Qianhui Dong. 2016. "Instantaneous Observability of Tightly Coupled SINS/GPS during Maneuvers" Sensors 16, no. 6: 765. https://doi.org/10.3390/s16060765