1. Introduction
Interest in Cooperative Localization (C.L.) has grown exponentially in the past few years [
1,
2]. The concept of C.L. is demonstrated by collecting a large amount of data from heterogeneous sensors to improve the volume of surveillance and increase the estimation reliability [
3]. This requires local sensors transforming their data to a common reference system for further processing. Due to the nonlinear issues, the transformations often introduce systematic errors [
4,
5]. Hence, the sensor registration algorithms are quite important.
Sensor registration mainly refers to the systematic errors, in contrast to the random errors. Various methods have been proposed including the centralized [
6,
7,
8] and decentralized solutions [
9,
10,
11,
12]. In the centralized solution, the exact maximum likelihood method is proposed where the sensor measurements were first projected onto the local coordinate, and then transformed to the public region [
13]. However, the errors introduced from stereographic projection suffer in both the local sensor and the public region. Regarding the decentralized solution, Lin
et al. presented the bias estimation based on the local tracks at different frames [
14]. This work considered both offset biases and scale biases and demonstrated some preliminary results. However, this technique estimates the biases during the filtering phases, which suffer from target maneuvers. Zhang
et al. presented the bias estimation based on the probability hypothesis density filter, in which only the translational biases were considered [
15].
In this paper, the statistic properties of the systematic errors are first analyzed, with respect to the mean and covariance. Then the weighted nonlinear least square method is utilized to estimate the corresponding biases in terms of range and bearing. The proposed solution also considers the maneuvers by normalizing the weights of the pseudo-measurements based on the covariances.
This paper is organized as follows:
Section 2 investigates the statistic proprieties of the systematic errors.
Section 3 introduces the nonlinear least square method to estimate the biases.
Section 4 presents simulation results in synchronous sensors. Finally, the paper is concluded in
Section 5.
2. Analysis of Systematic Error Properties
In this section, the systematic error is analyzed with respect to the expectation and covariance in terms of range and bearing.
2.1. Problem Statement
In cooperative localization, measurements are collected in a polar coordinate system which also contains both biases and random noises. The measured range
and bearing
are thus defined as
where
and
denote the ground truth,
and
denote the corresponding biases.
and
are assumed to be the Gaussian noises with zero mean and standard deviations
and
. For the localization task, measurements from polar coordinates are transformed to Cartesian coordinates by using
2.2. True Systematic Error
The transformed measurement can also be represented as the combination of the true value and the systematic error.
where
and
denote the true values and
and
denote the systematic errors.
Rearranging Equtions (
5) and (
6), we have the representation of the systematic errors. Here we only show the systematic in
x direction for simplification reasons.
and
where
Instead of calculating systematic error by using ground-truths, biases and noises, the statistics properties are considered where the random noises are eliminated.
The expectation and covariance of the systematic error can be explicitly calculated with following equations:
The statistic properties of the systematic error are summarized as
and
where
equals
Similarly, the corresponding systematic error in
y direction is calculated. Equation (
15) and Equation (
16) still depend on the ground-truths, which are unavailable in practice. Hence, the systematic errors are calculated again on condition of the measurements.
2.3. Systematic Error in Practice
Based on the Equation (
15) and Equation (
16), the conditional first and second order moments are calculated as
and
where
Equations (
17)–(
20) successfully estimate the systematic error by using the original measurements. The uncertainty of the estimation is also calculated as
3. Bias Estimation Using Nonlinear Least Square Method
To calculate the biases, information from additional sensors are required. Suppose both the radar and GPS measurements (GPS only contains random noises) are provided, we have
where
and
denote the transformed measurement,
and
denote the GPS measurement.
Based on the statistic properties of the systematic error, the expectations of Equations (
23) and (
24) are described as
To estimate the biases, a weighted nonlinear least square method is utilized in which the calculation formula is written as
where
and
is the index of the measurement,
is the weight matrix and calculated by the inverse of the deviation.
To calculate the bias
, the gradient
is utilized by
Hence the bias is estimated with an initial value
by taking in the direction which
drops most rapidly. More details of the nonlinear least square method could be found in [
16].
4. Simulation
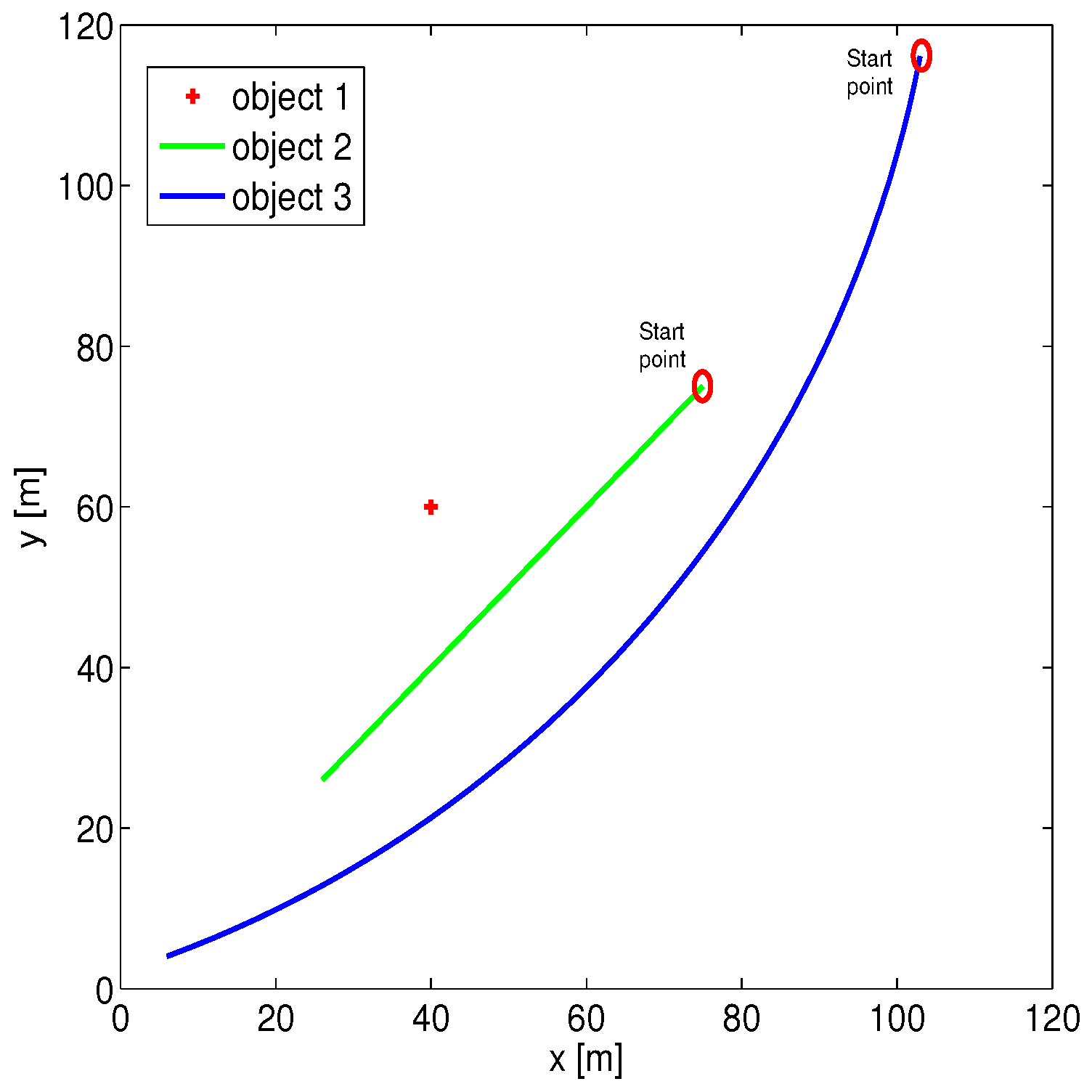
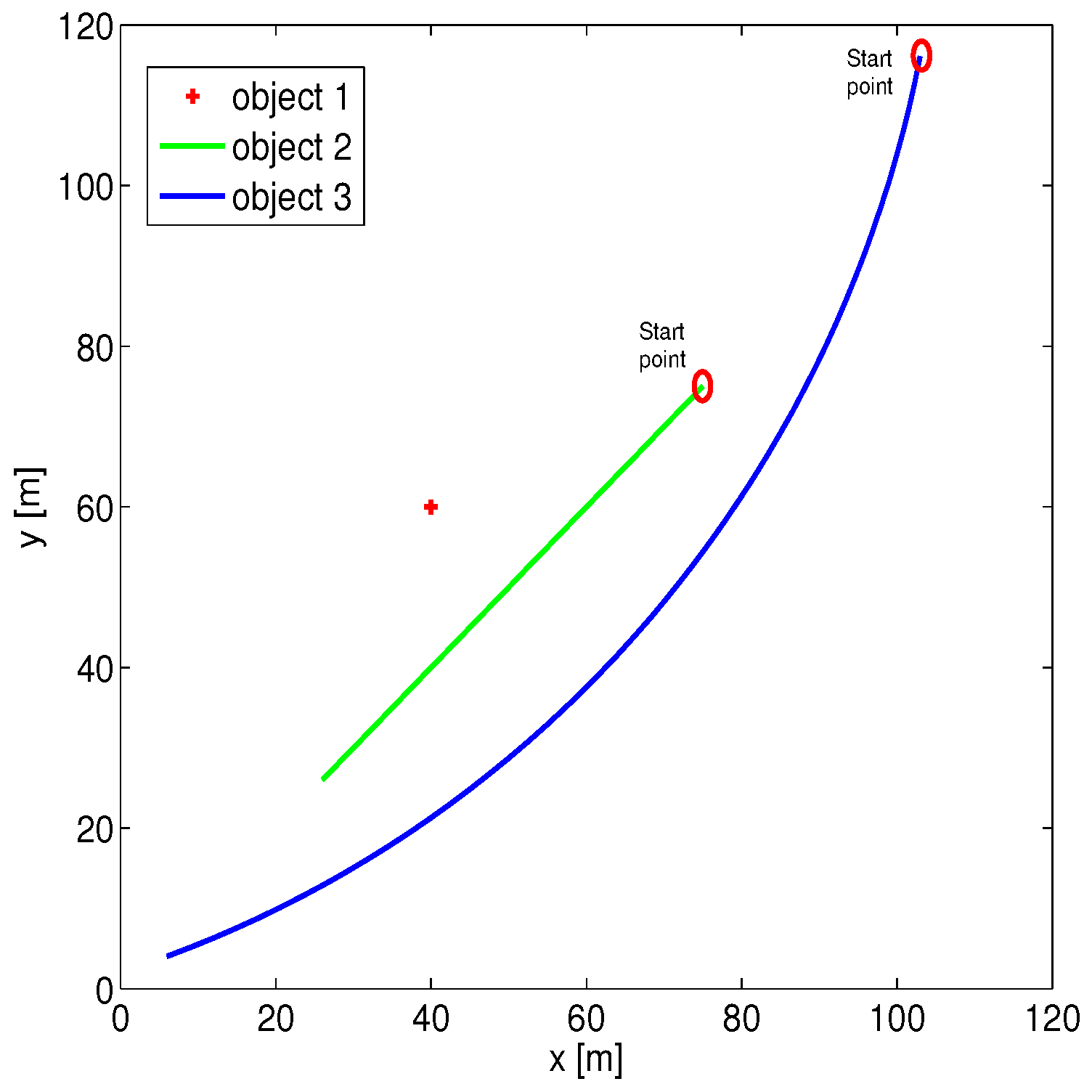
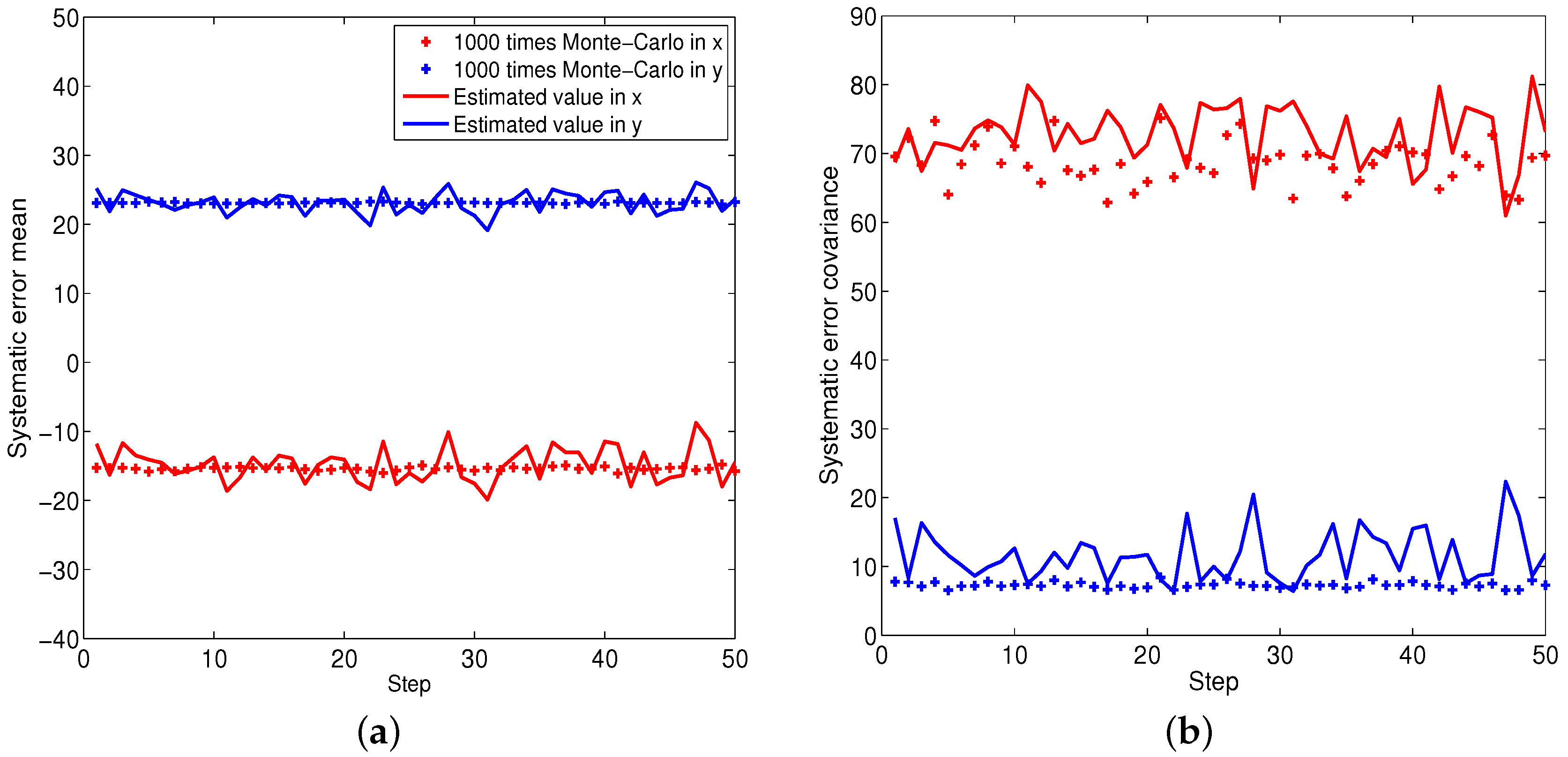
In this section, simulated data were used to evaluate the effectiveness of the proposed approach. The statistic properties of the systematic error are first evaluated by conducting 1000 times Monte-Carlo simulation. During the simulation, three objects are measured in 50 steps: (1) stationary object; (2) object with constant velocity; (3) object with maneuver (constant turn). The trajectories of all objects are exhibited in
Figure 1. The radar is at the original point and the biases are given by
= 15 m and
= 0.3 rad, where the corresponding random noises are given by zero mean with deviation 1 m in range and
in bearing.
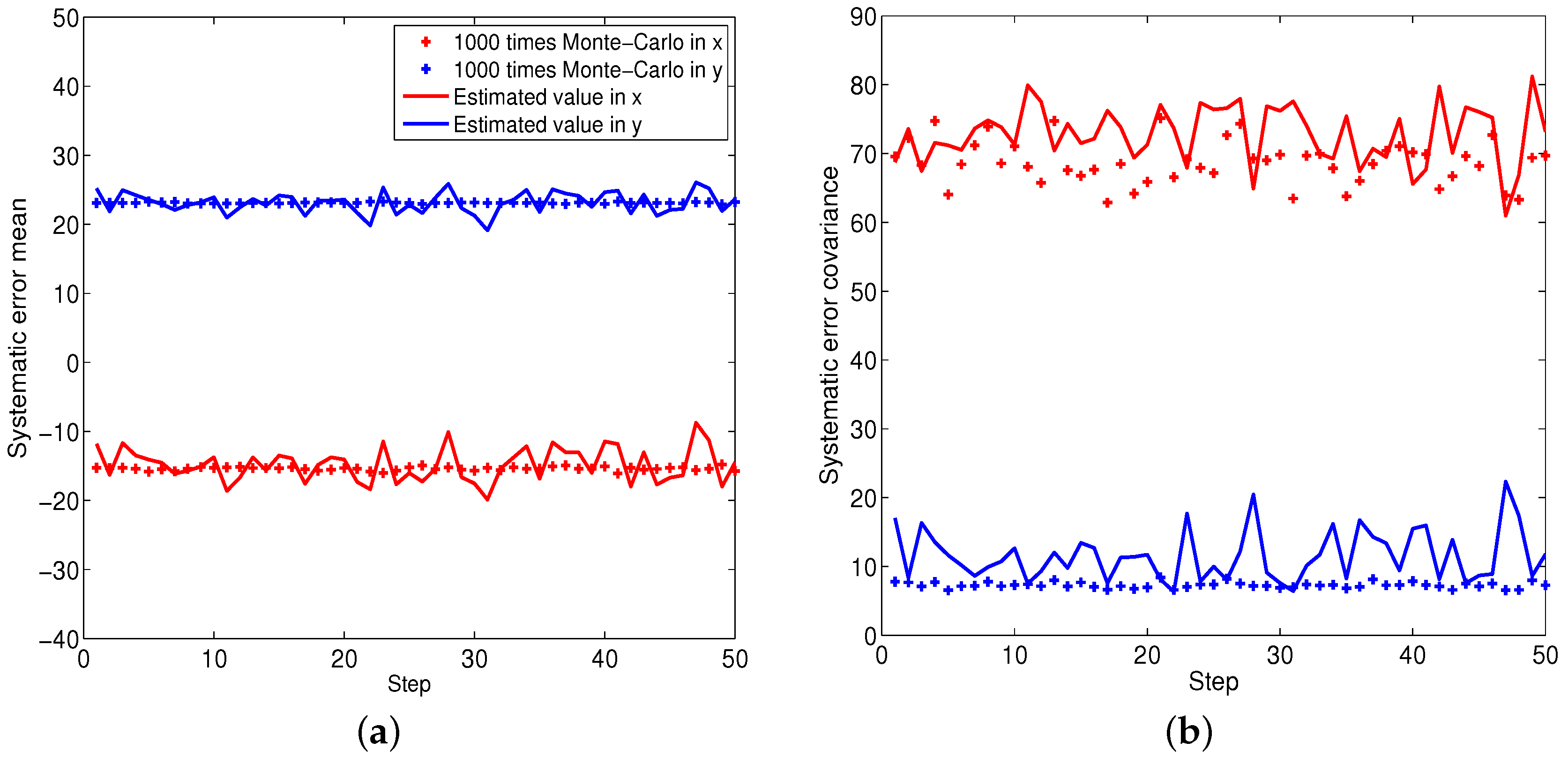
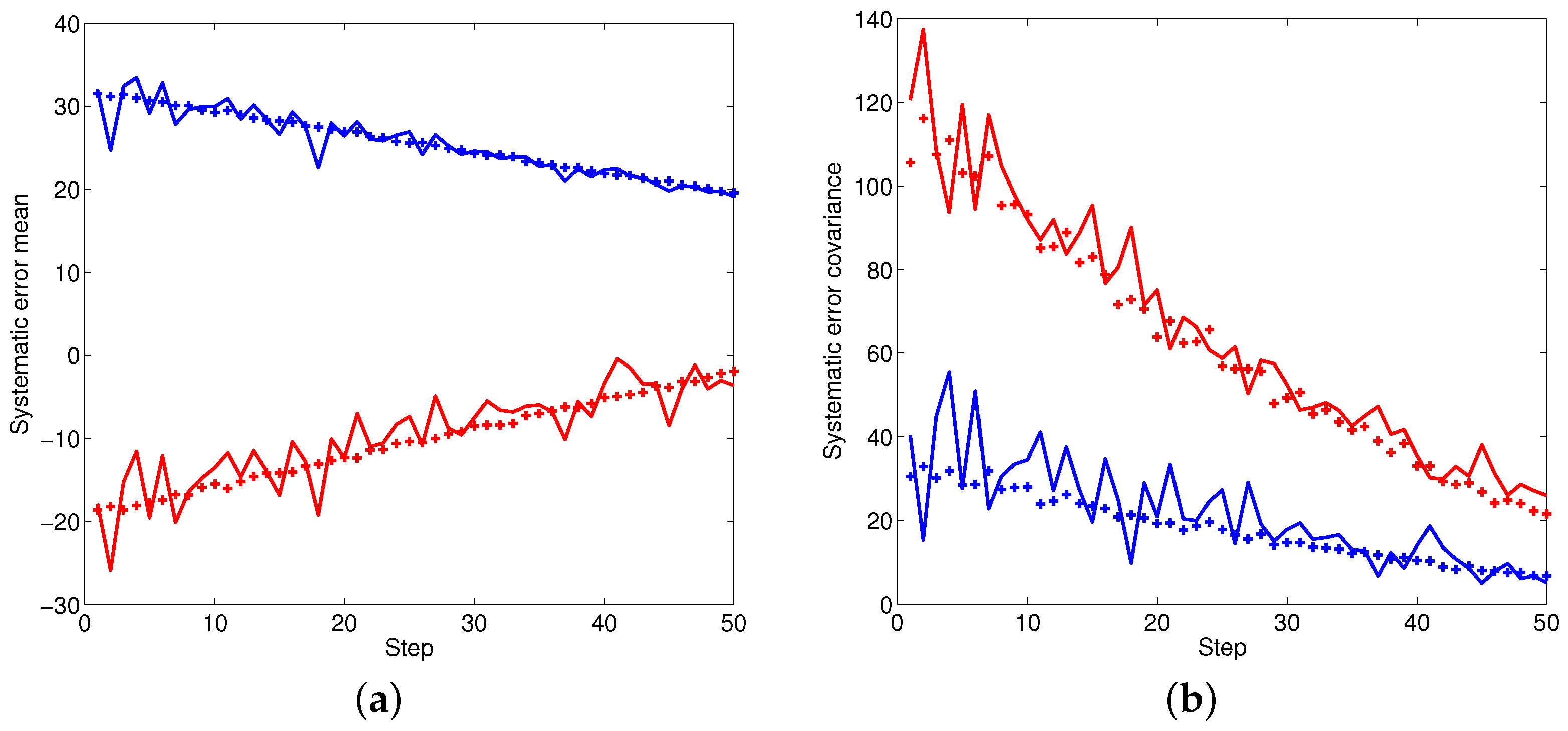
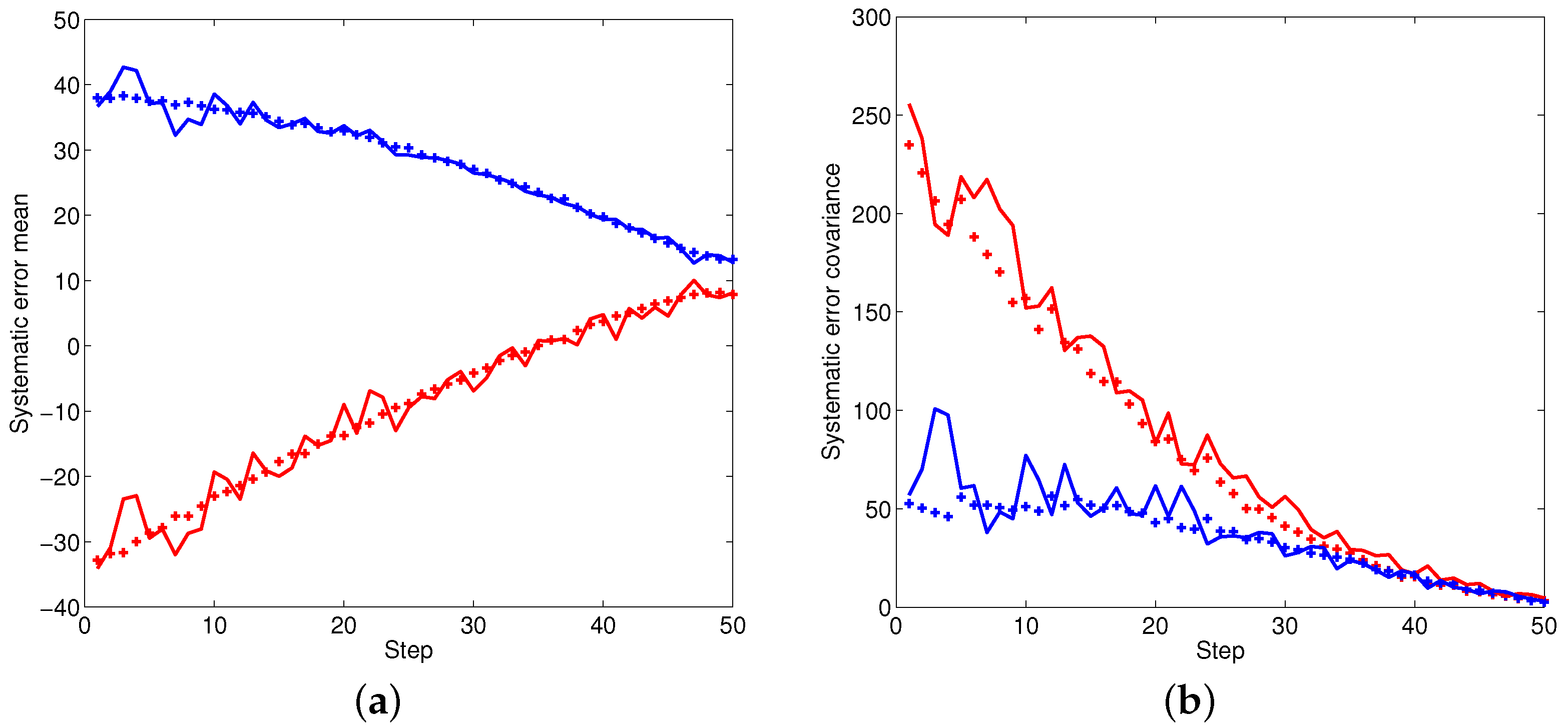
Figure 2,
Figure 3 and
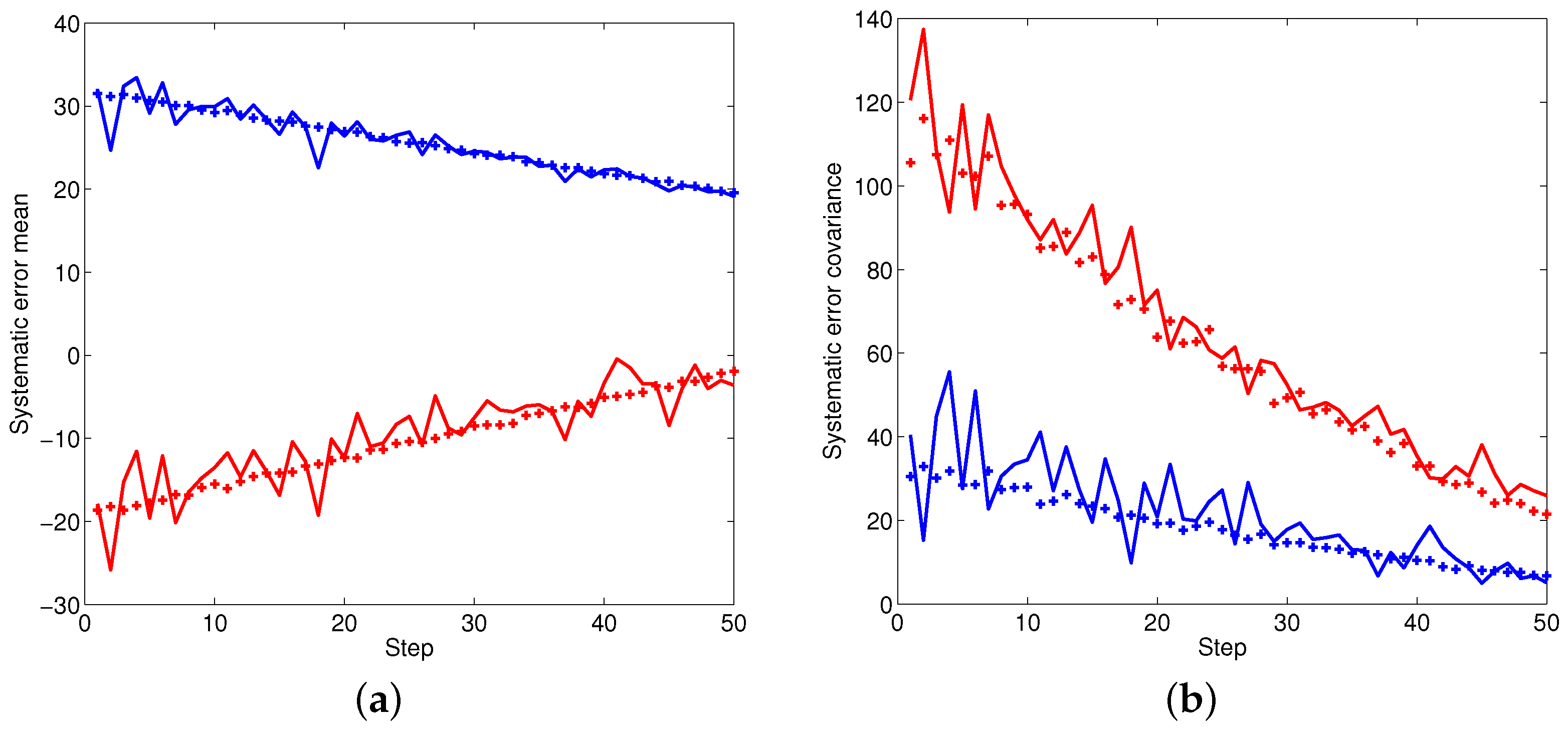
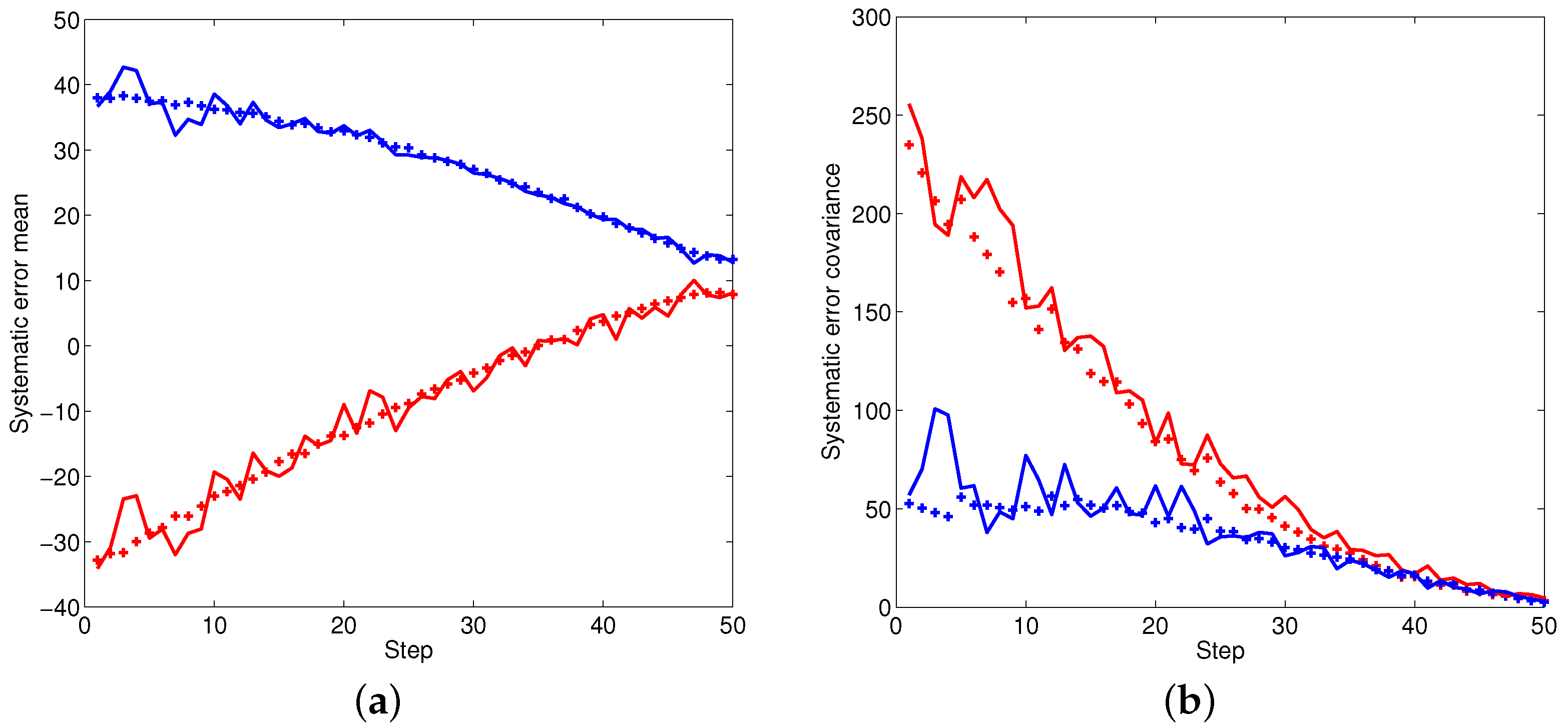
Figure 4 illustrate the performance of the systematic error analyzation for all objects by using the proposed models. Since the first object is a non-moving object, both the estimated expectation and covariance of the systematic error are close to constant values. The estimation for constant velocity and maneuver objects are exhibited in
Figure 3 and
Figure 4. It is observed that the errors are independent with the positions. It is also observed that both the expectation and covariance are significantly decreased when objects are close to the radar.
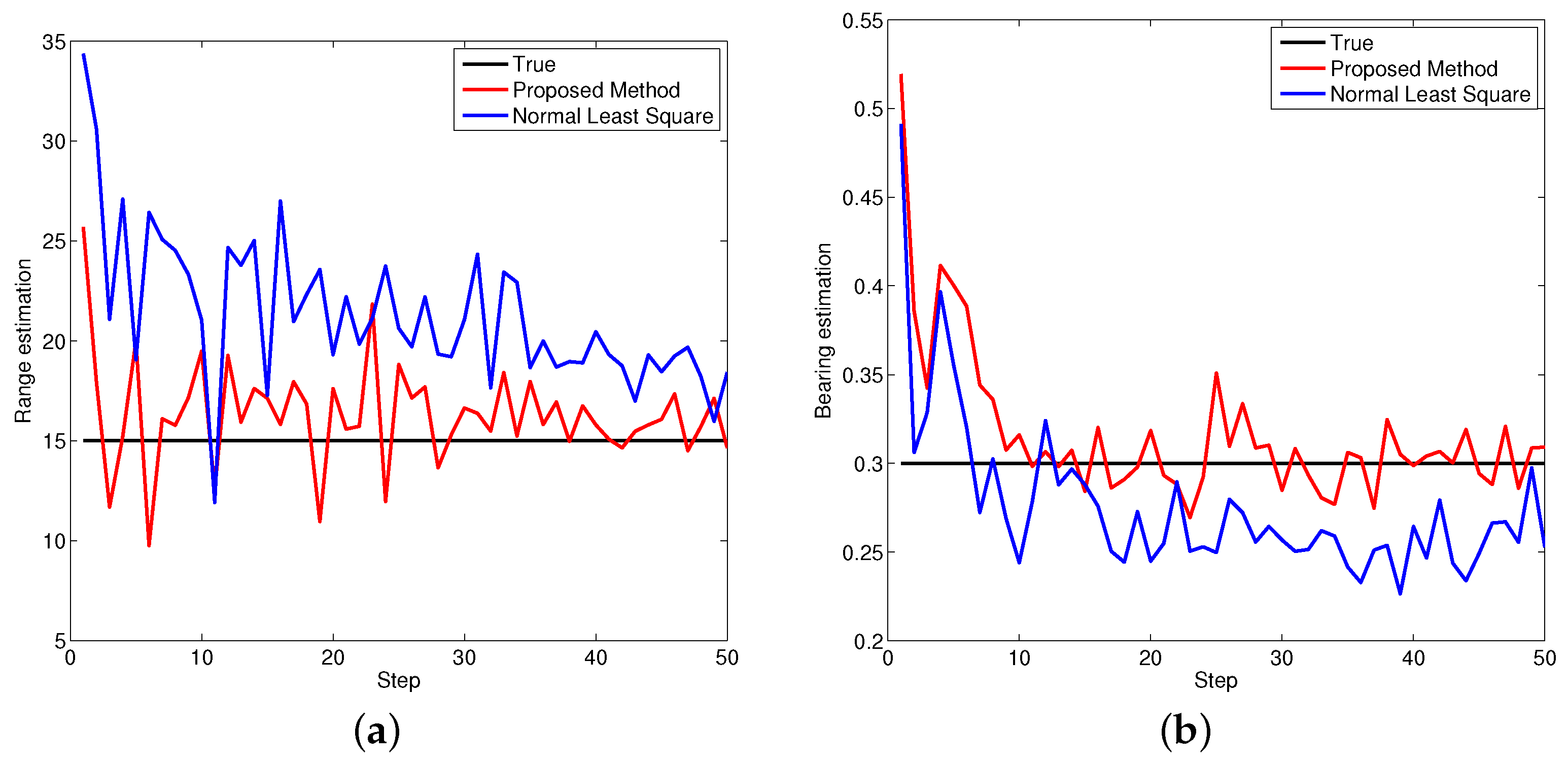
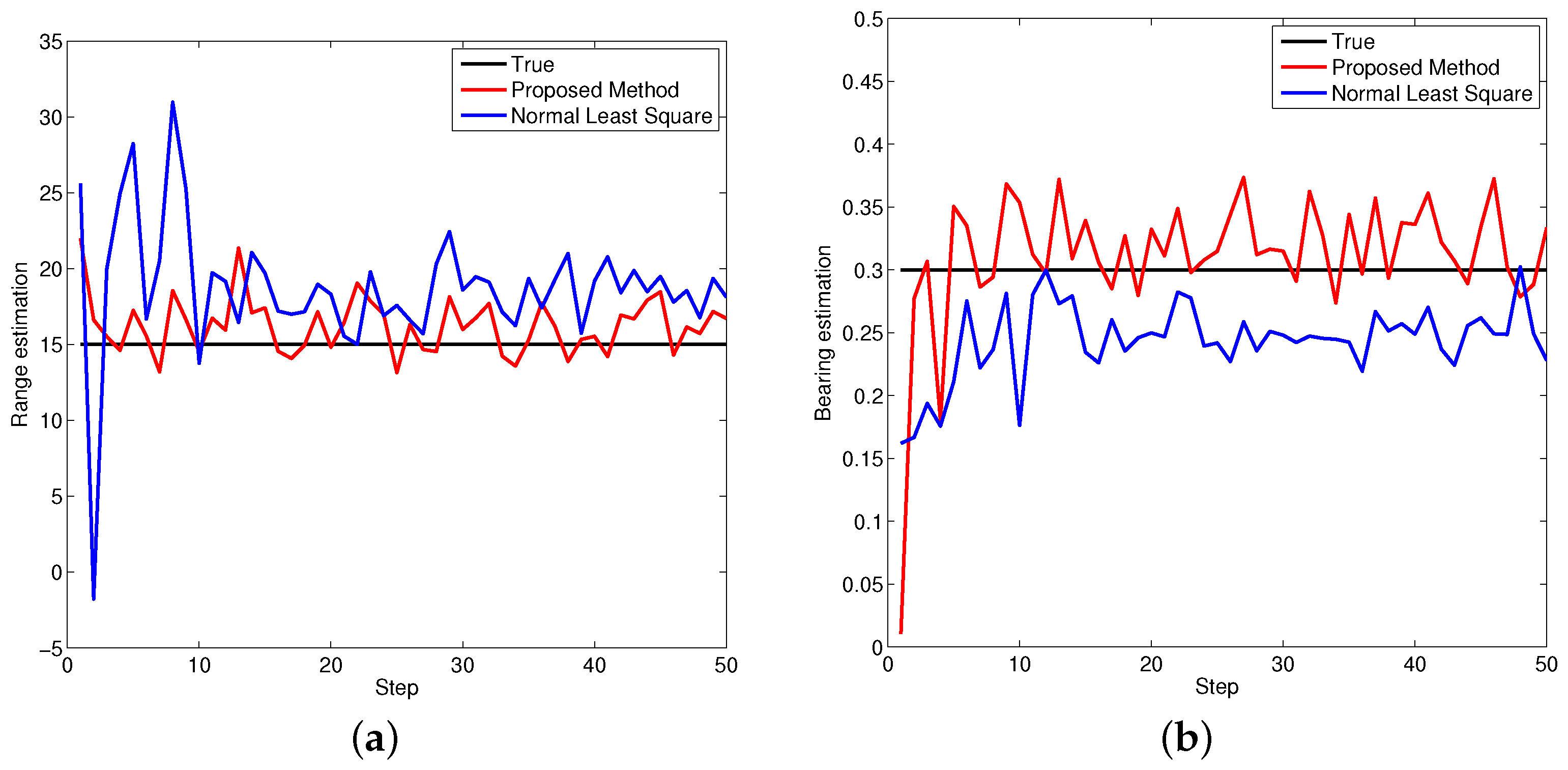
The biases are also estimated by using the non-linear least square estimator. During the estimation phase, additional information from GPS are required (zero mean, standard deviation 10 m). Note that the sensor alignment method [
6] (normal least square method, using first order Taylor extension for linearizion) is also utilized to compare the performances.
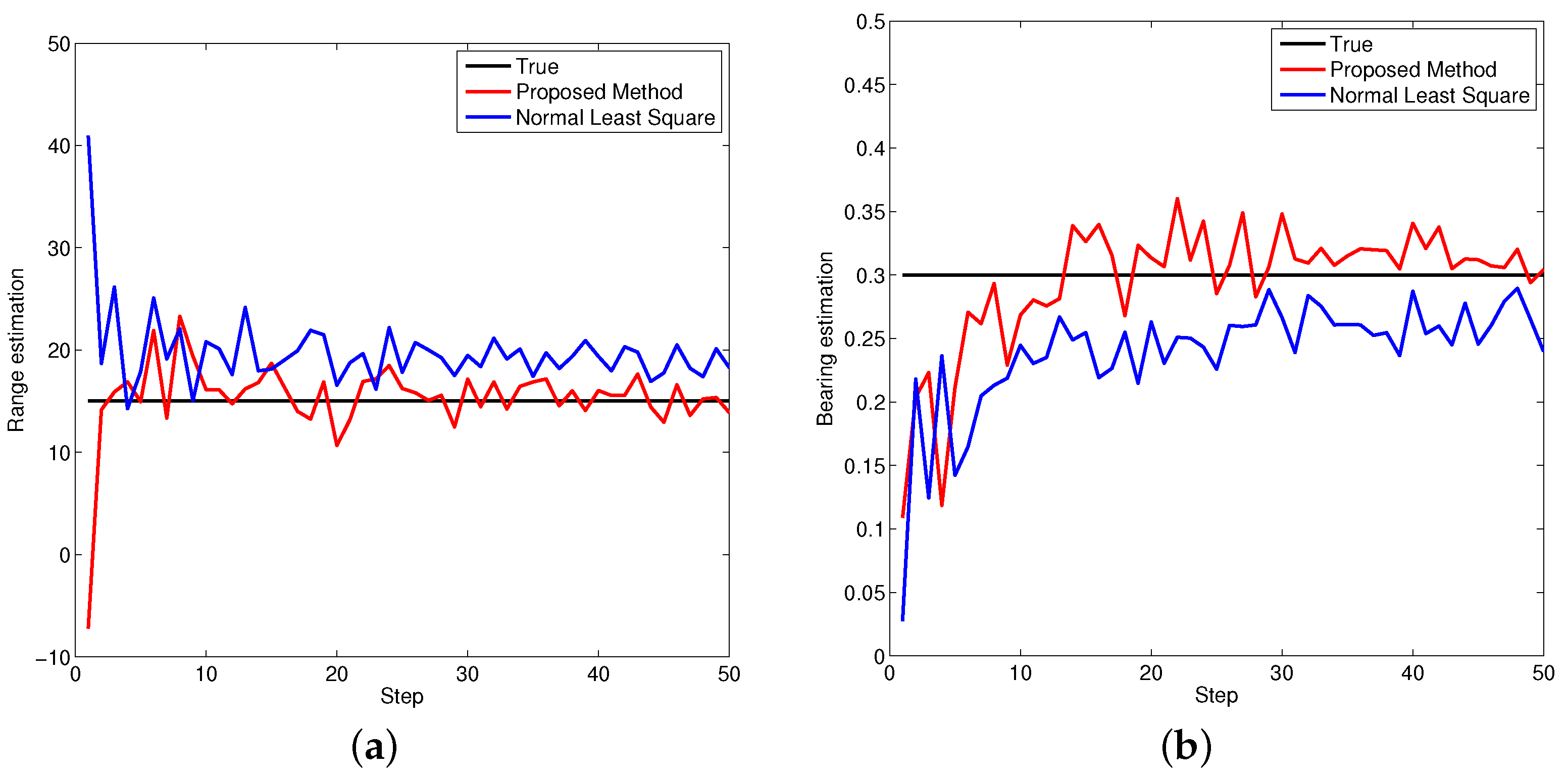
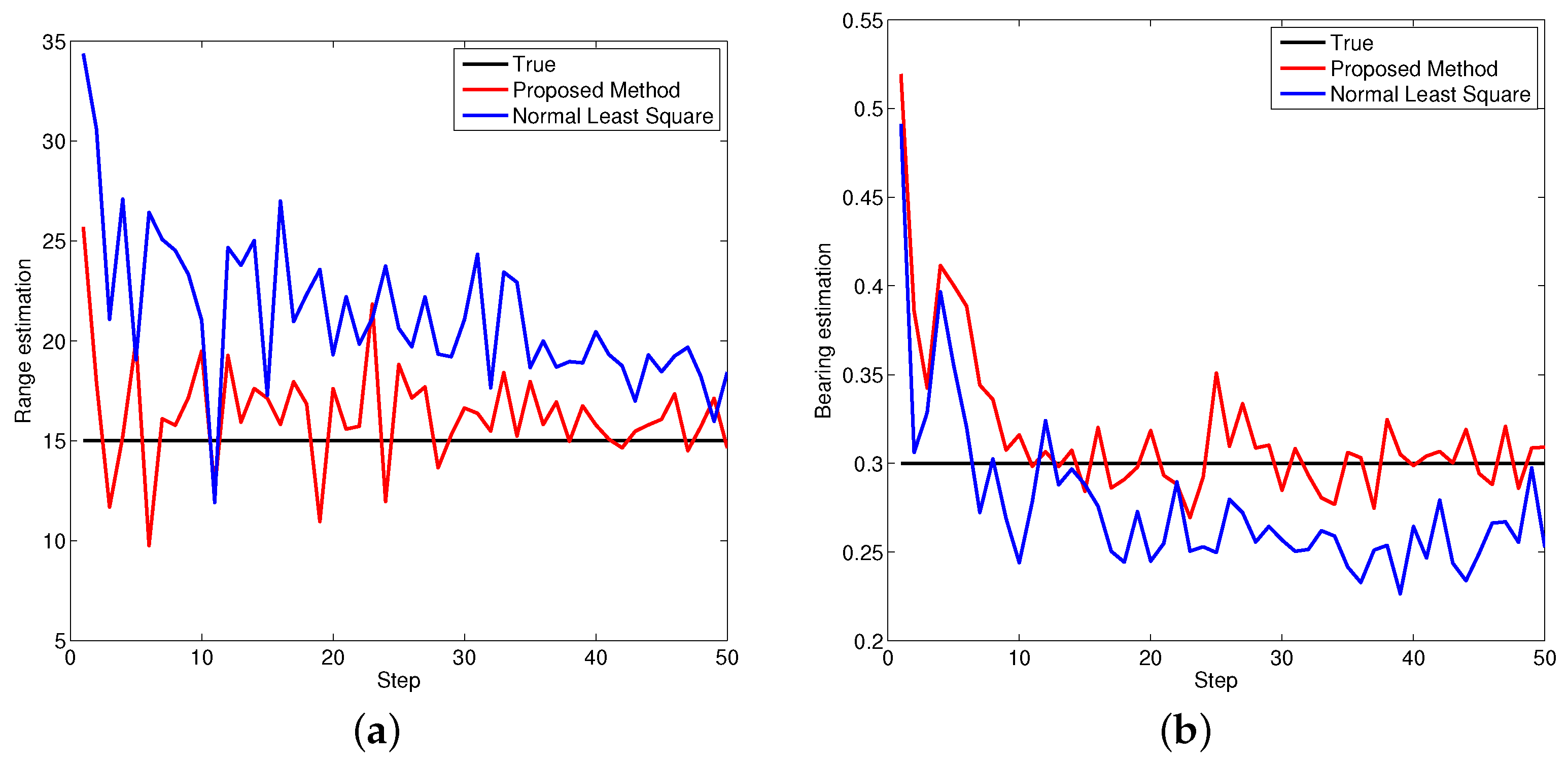
Figure 5,
Figure 6 and
Figure 7 demonstrate the performance of both approaches, where the biases are recursively estimated in terms of range and bearing. Since the proposed approach operates on the raw data level, the estimation contains huge differences at beginning. With increasing time, the estimator successfully converges to the ground truths. It is observed that the proposed approach has high performance in all scenarios compared to the state-of-the-art.
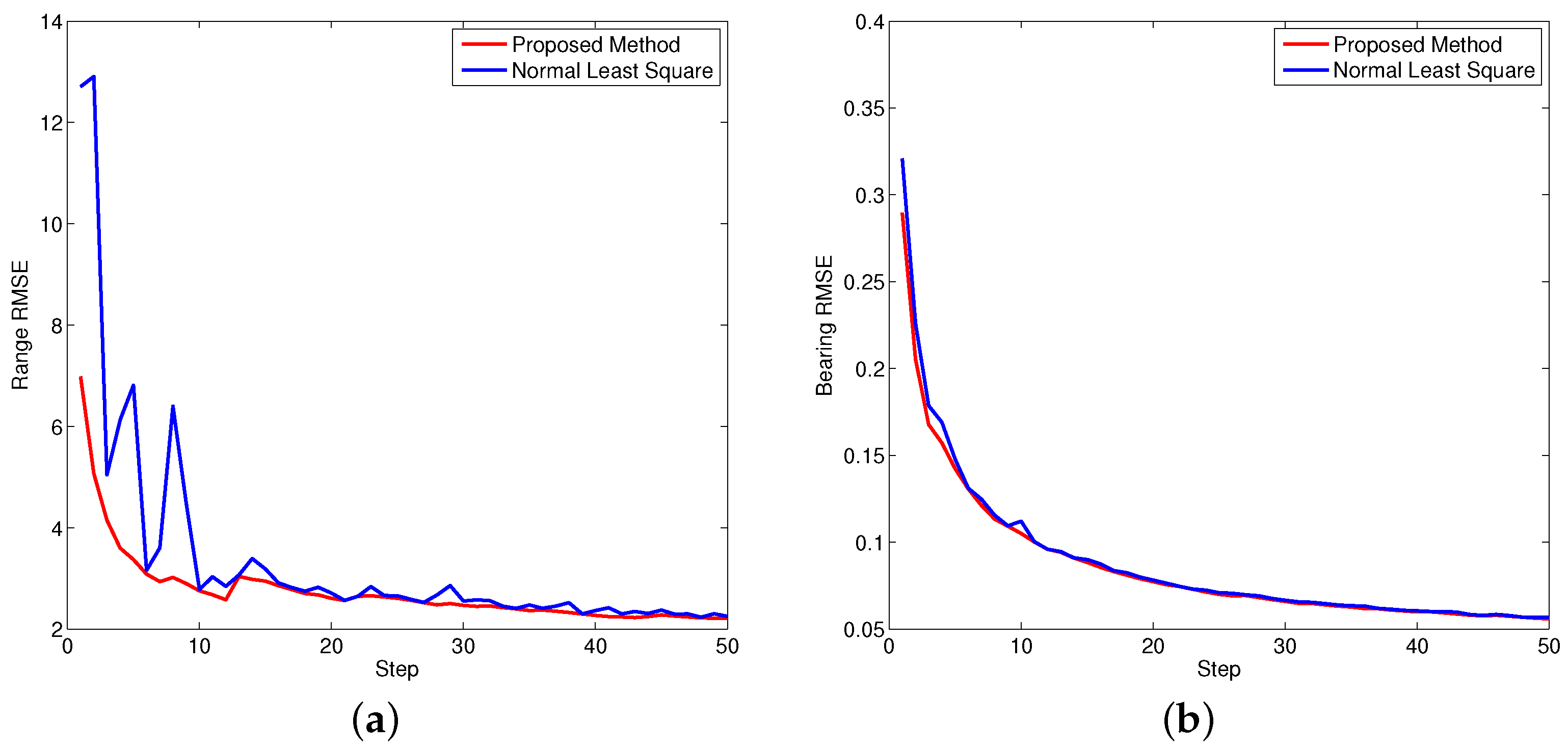
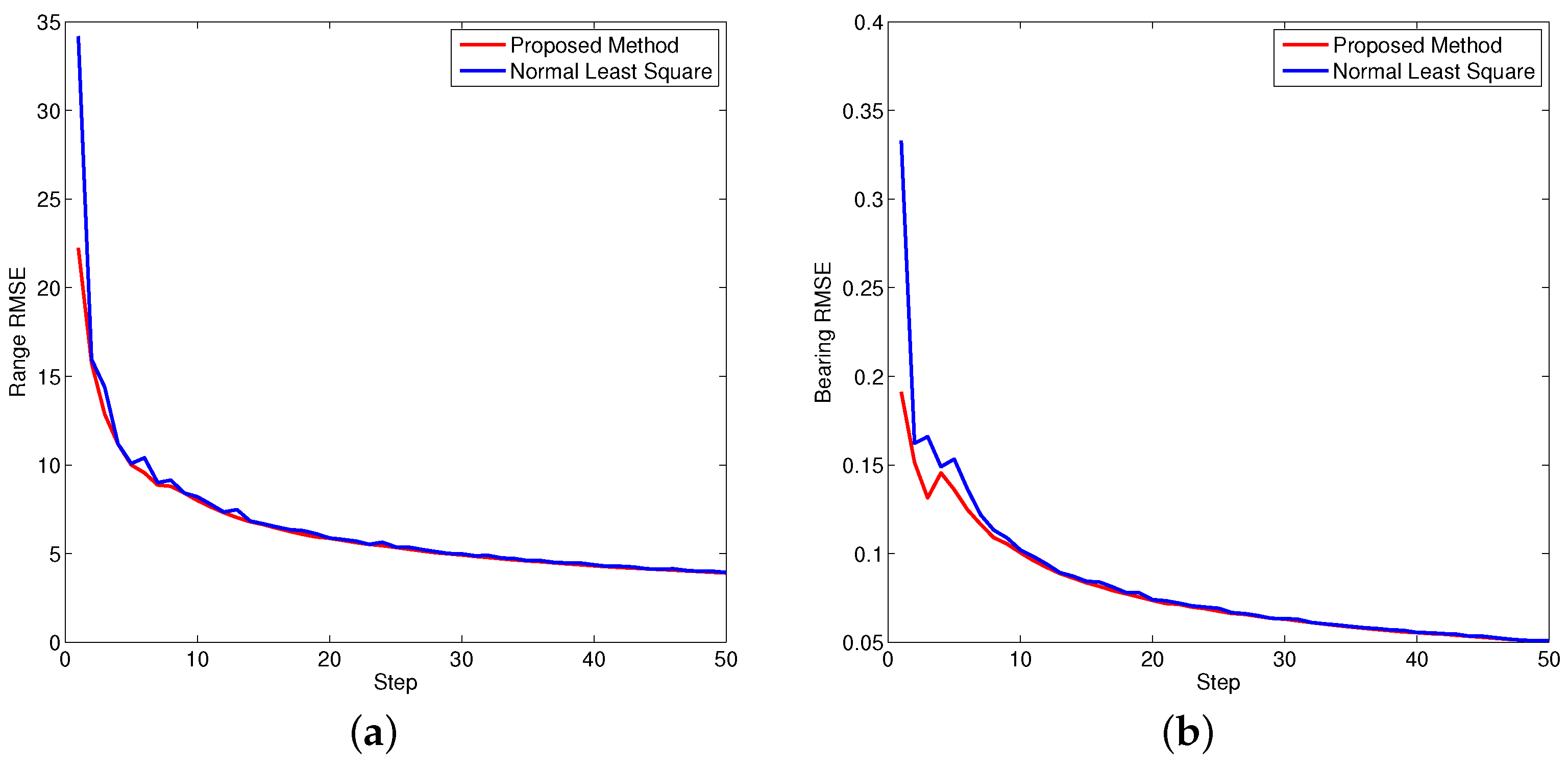
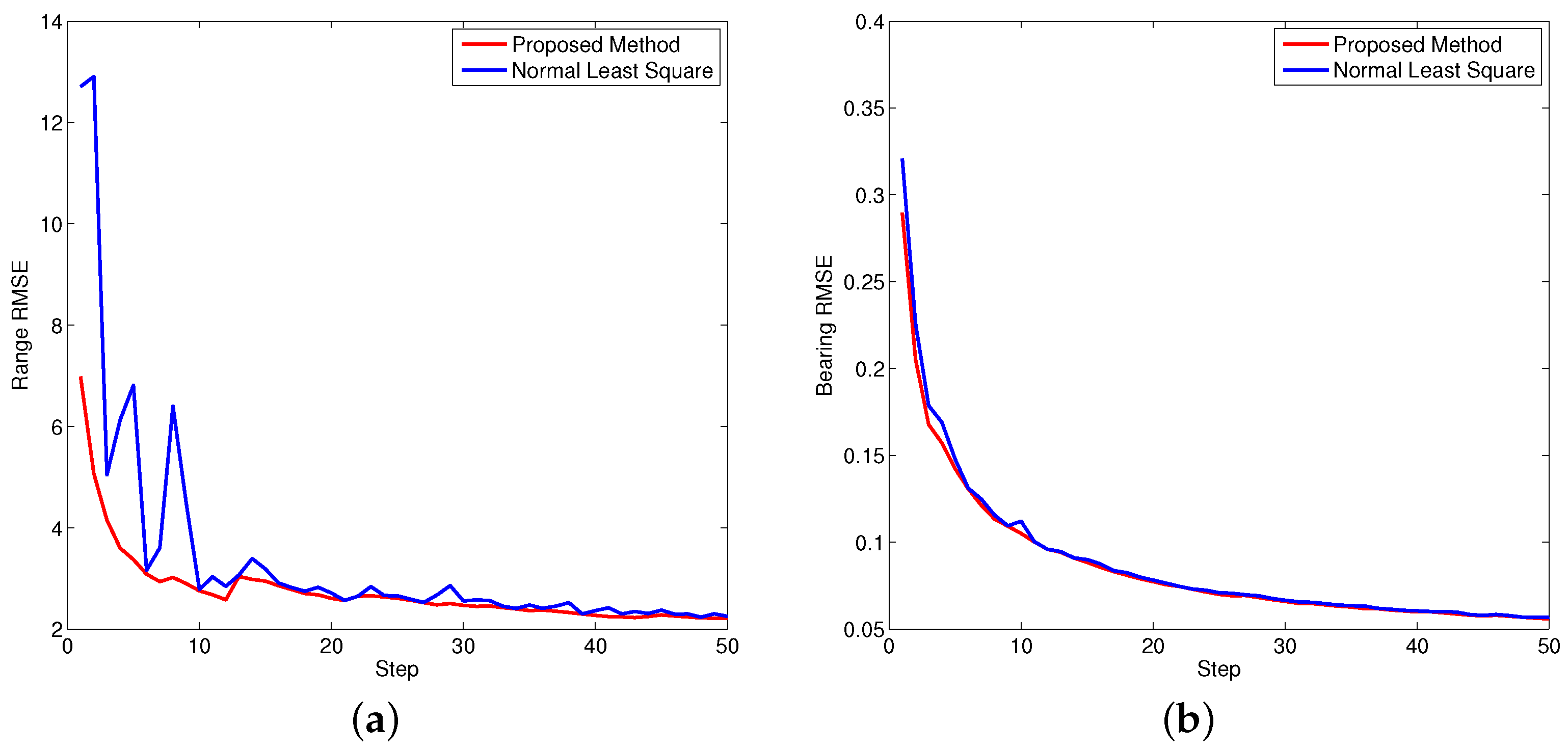
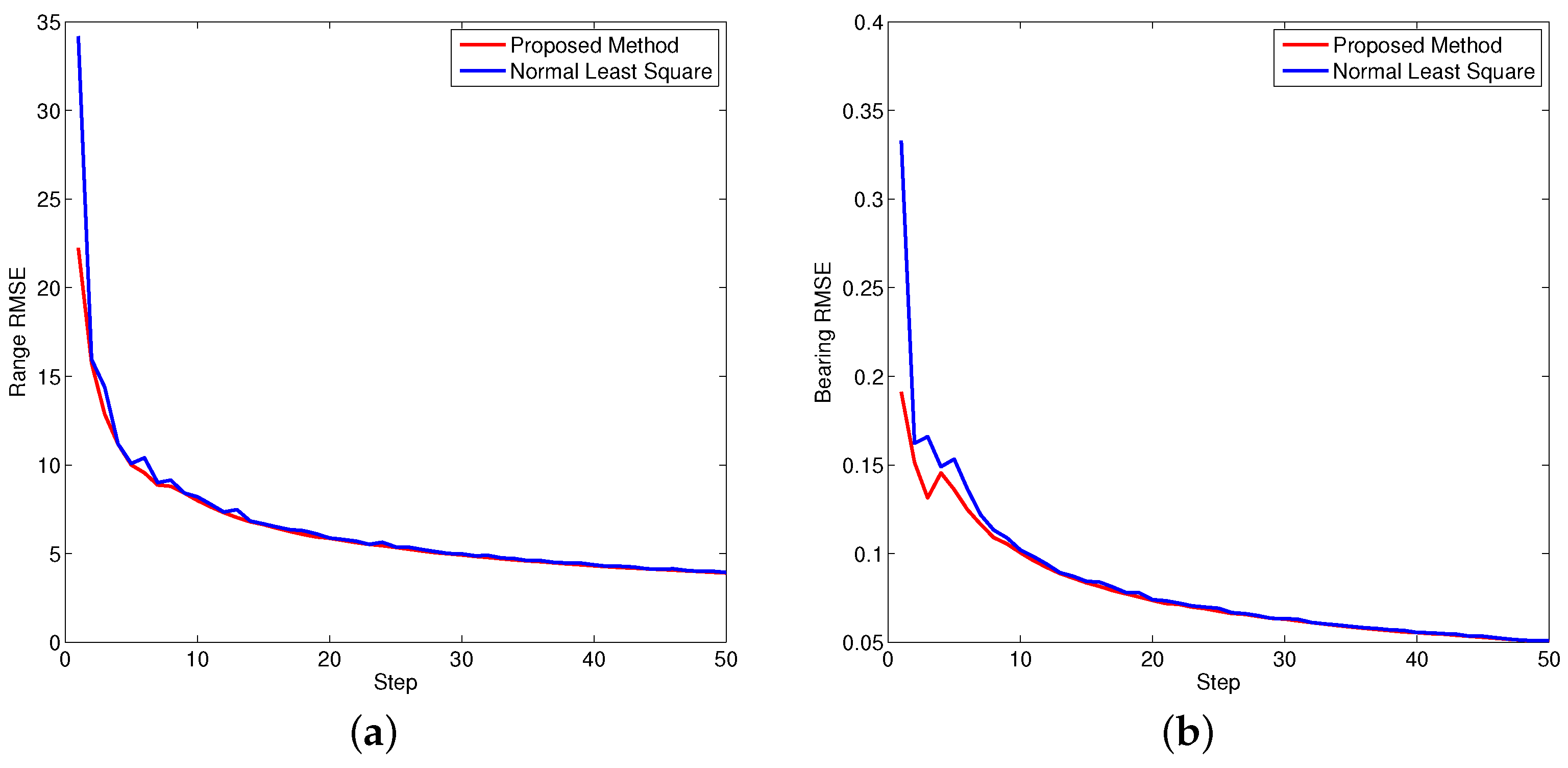
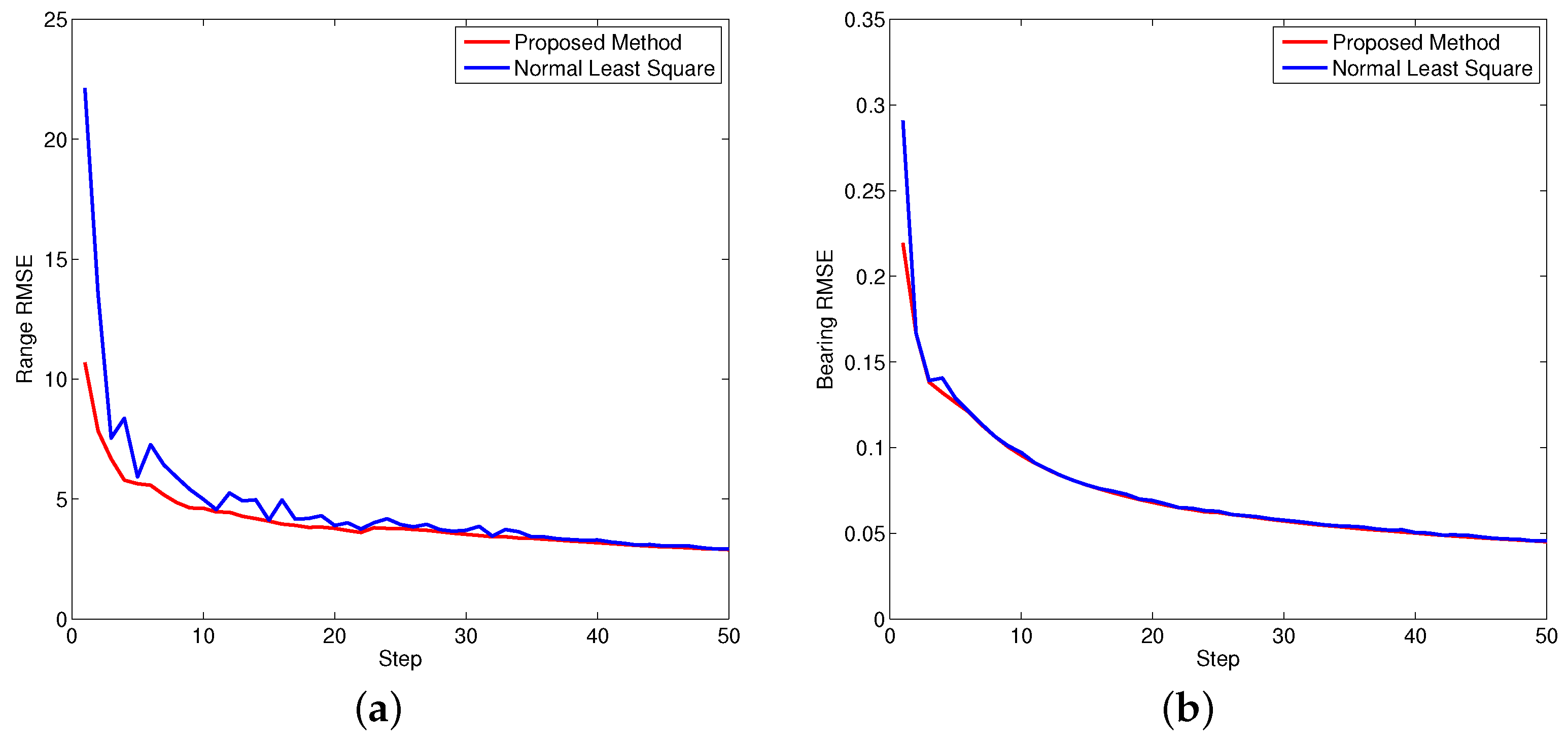
To evaluate the performance quantitatively, the root mean square equation (RMSE) is also used as follows:
where
n is the step index.
Figure 8,
Figure 9 and
Figure 10 show the performance of both approaches evaluated by RMSE. Since the bearing bias is much smaller compared to the range bias, the corresponding RMSE is smaller in contrast to the range bias. Based on the calculation, it is concluded the overall performance of the proposed approach is better than the normal least square method.
Contributions are summarized as follows: First, the statistic properties of the systematic error are analyzed and evaluated. Second, a least square method is proposed to estimate sensor biases based on the proposed statistics properties. The benefit of the proposed systematic error model is that the unbiased measurement may be calculated during the filtering phase combined with the uncertainties. Furthermore, the sensor biases could also be calculated by solely relying on the measurements.
5. Conclusions
In this paper, the systematic error is analyzed and modeled with respect to its statistic properties. The proposed model not only calculates the expectation of the systematic error, but also gives the covariance. Furthermore, a nonlinear least square method is proposed to estimate sensor biases. In comparison to the related work, the proposed approach recursively estimates both the error and sensor biases in absence of the ground truths. The performance is evaluated by using 1000 times Monte-Carlo simulation and three objects with different maneuvers. A comparative study has also been carried out and exhibits the high performance of the proposed approach. Future work focuses on the application of the proposed approach in real scenarios.
Acknowledgments
This work was supported by the German Research Foundation (DFG) and the Technische Universität München within the funding programme Open Access Publishing.
Author Contributions
All authors have contributed to the manuscript. Feihu Zhang performed the experiments and analyzed the data. Alois Knoll provided helpful feedback on the experiments design.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gu, Y.; Hsu, L.T.; Kamijo, S. Passive sensor integration for vehicle self-localization in urban traffic environment. Sensors 2015, 15, 30199–30220. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Hinz, G.; Clarke, D.; Knoll, A. Vehicle-Infrastructure Localization Based on the SME Filter. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC), Las Palmas, Spain, 15–18 September 2015; pp. 225–230.
- Ali, N.A.; Abu-Elkheir, M. Improving Localization Accuracy: Successive Measurements Error Modeling. Sensors 2015, 15, 15540–15561. [Google Scholar] [CrossRef] [PubMed]
- Bordonaro, S.; Willett, P.; Bar-Shalom, Y. Decorrelated unbiased converted measurement Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1431–1444. [Google Scholar] [CrossRef]
- Bordonaro, S.V.; Willett, P.; Bar-Shalom, Y. Unbiased tracking with converted measurements. In Proceedings of the 2012 IEEE Radar Conference (RADAR), Atlanta, GA, USA, 7–11 May 2012; pp. 0741–0745.
- Zhou, Y.; Leung, H.; Blanchette, M. Sensor alignment with Earth-centered Earth-fixed (ECEF) coordinate system. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 410–418. [Google Scholar] [CrossRef]
- Leung, H.; Blanchette, M.; Harrison, C. A least squares fusion of multiple radar data. In Proceedings of the RADAR, Paris, France, 3–6 May 1994; pp. 364–369.
- Morell-Gimenez, V.; Saval-Calvo, M.; Azorin-Lopez, J.; Garcia-Rodriguez, J.; Cazorla, M.; Orts-Escolano, S.; Fuster-Guillo, A. A comparative study of registration methods for RGB-D video of static scenes. Sensors 2014, 14, 8547–8576. [Google Scholar] [CrossRef] [PubMed]
- Lin, X.; Bar-Shalom, Y.; Kirubarajan, T. Exact multisensor dynamic bias estimation with local tracks. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 576–590. [Google Scholar]
- Wang, W.; Jiang, L.; Jing, Y. Maximum a posteriori algorithm for joint systematic bias estimation and track-to-track fusion. In Proceedings of the 2014 11th World Congress on Intelligent Control and Automation (WCICA), Shenyang, China, 29 June–4 July 2014; pp. 6121–6126.
- Han, Y.; Zhu, H.; Han, C. Track-to-track association in the presence of sensor bias and the relative bias estimation. In Proceedings of the 2012 15th International Conference on Information Fusion (FUSION), Singapore, 9–12 July 2012; pp. 1044–1050.
- Huang, D.; Leung, H.; Bosse, E. A Pseudo-Measurement Approach to Simultaneous Registration and Track Fusion. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2315–2331. [Google Scholar] [CrossRef]
- Zhou, Y.; Leung, H.; Yip, P.C. An exact maximum likelihood registration algorithm for data fusion. IEEE Trans. Signal Process. 1997, 45, 1560–1573. [Google Scholar] [CrossRef]
- Lin, X.; Kirubarajan, T.; Bar-Shalom, Y. Multisensor bias estimation using local tracks without a priori association. In Proceedings of the SPIE’s 48th Annual Meeting, Optical Science and Technology, International Society for Optics and Photonics, San Diego, CA, USA, 3 August 2003; pp. 334–345.
- Zhang, F.; Buckl, C.; Knoll, A. Multiple vehicle cooperative localization with spatial registration based on a probability hypothesis density filter. Sensors 2014, 14, 995–1009. [Google Scholar] [CrossRef] [PubMed]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}