
Fuzzy-Based Hybrid Control Algorithm for the Stabilization of a Tri-Rotor UAV



Abstract
:1. Introduction
2. System Model and Preliminaries
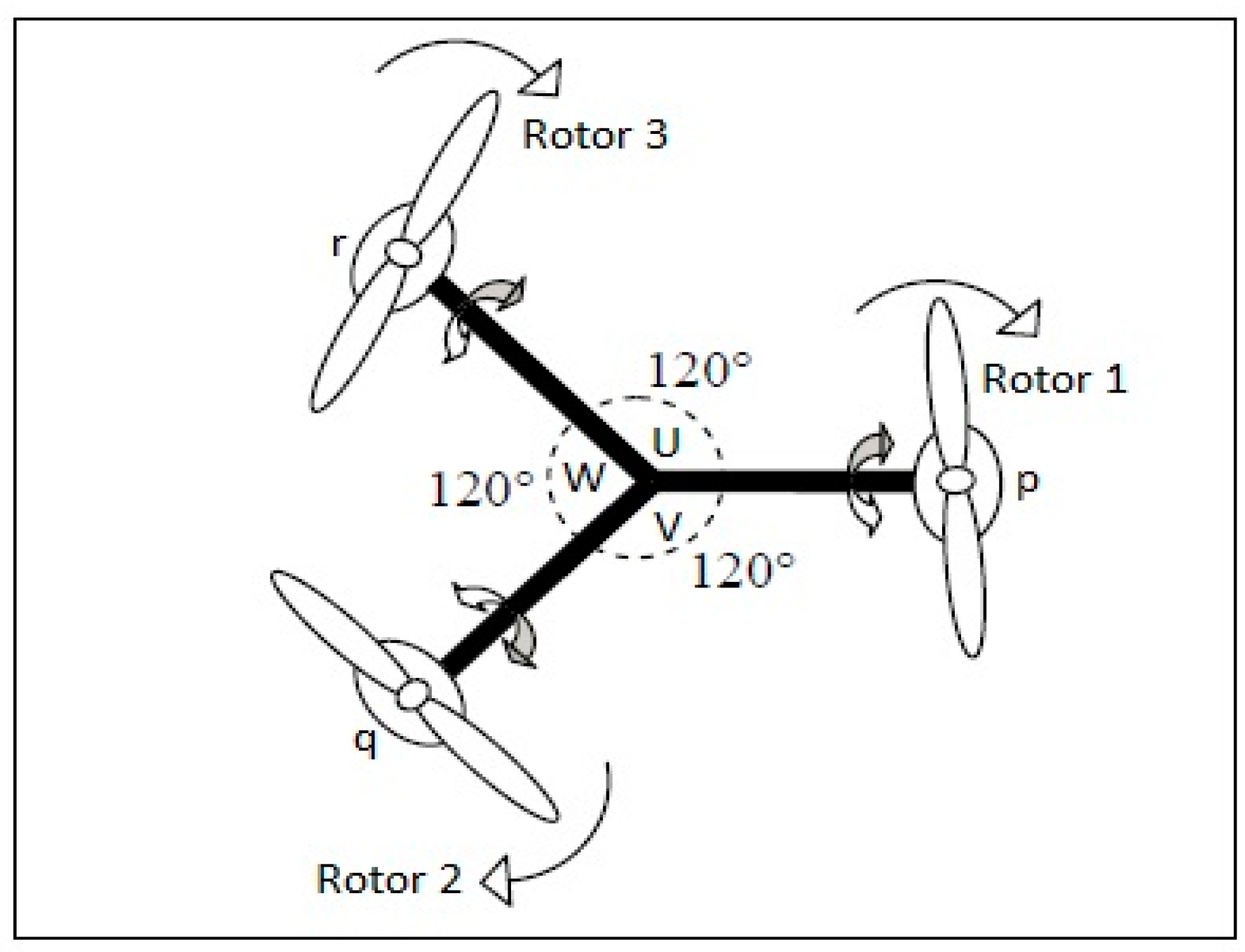
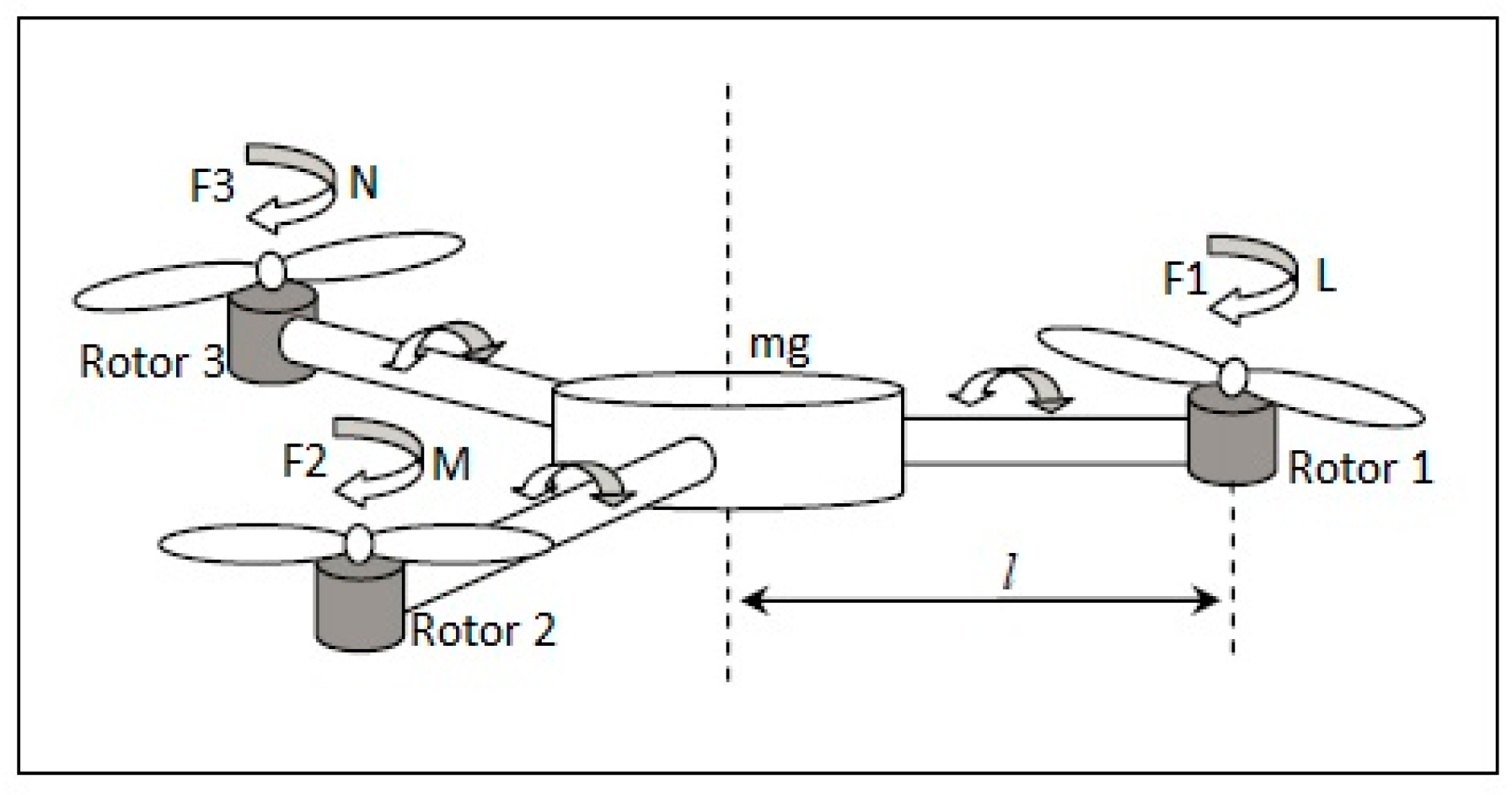
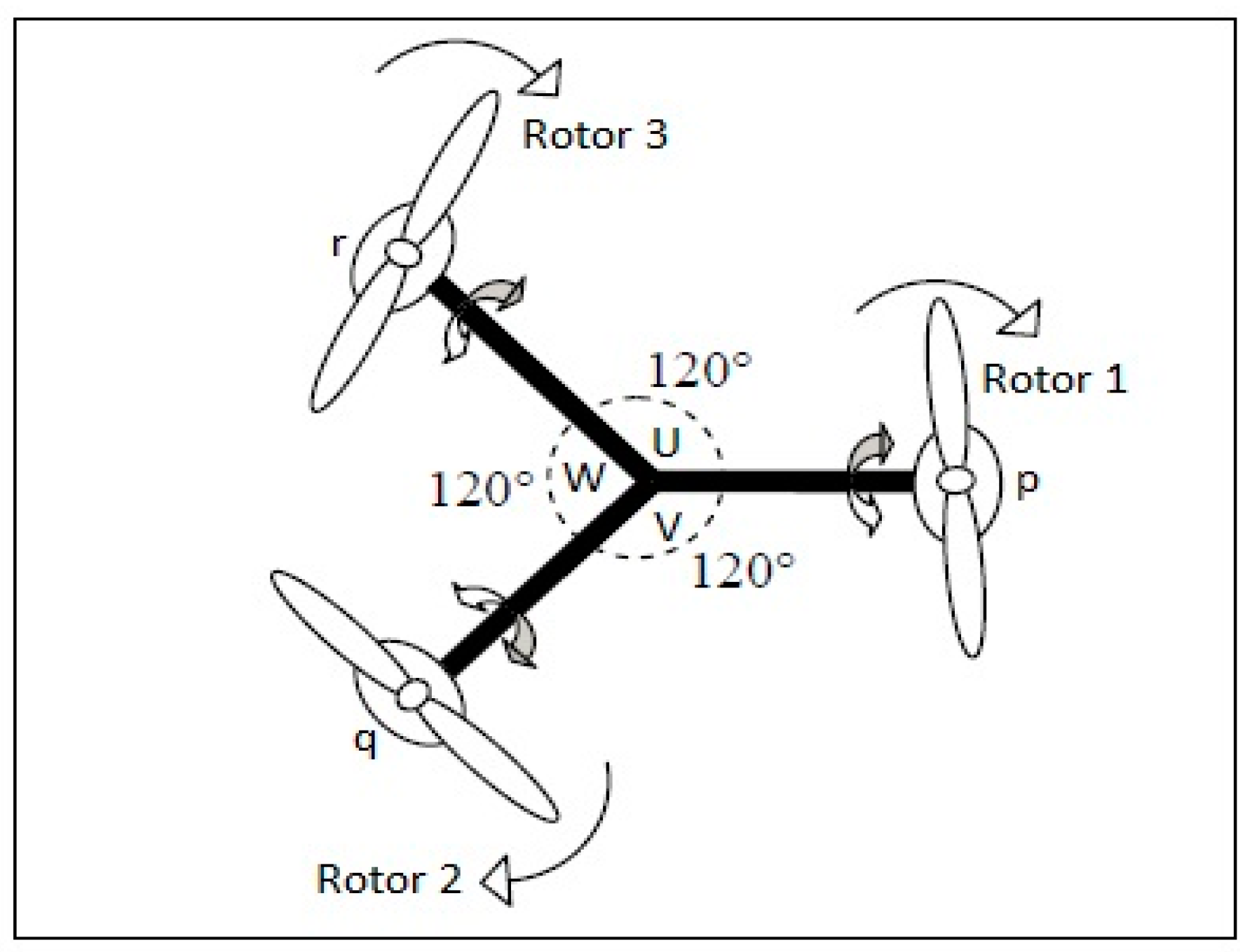
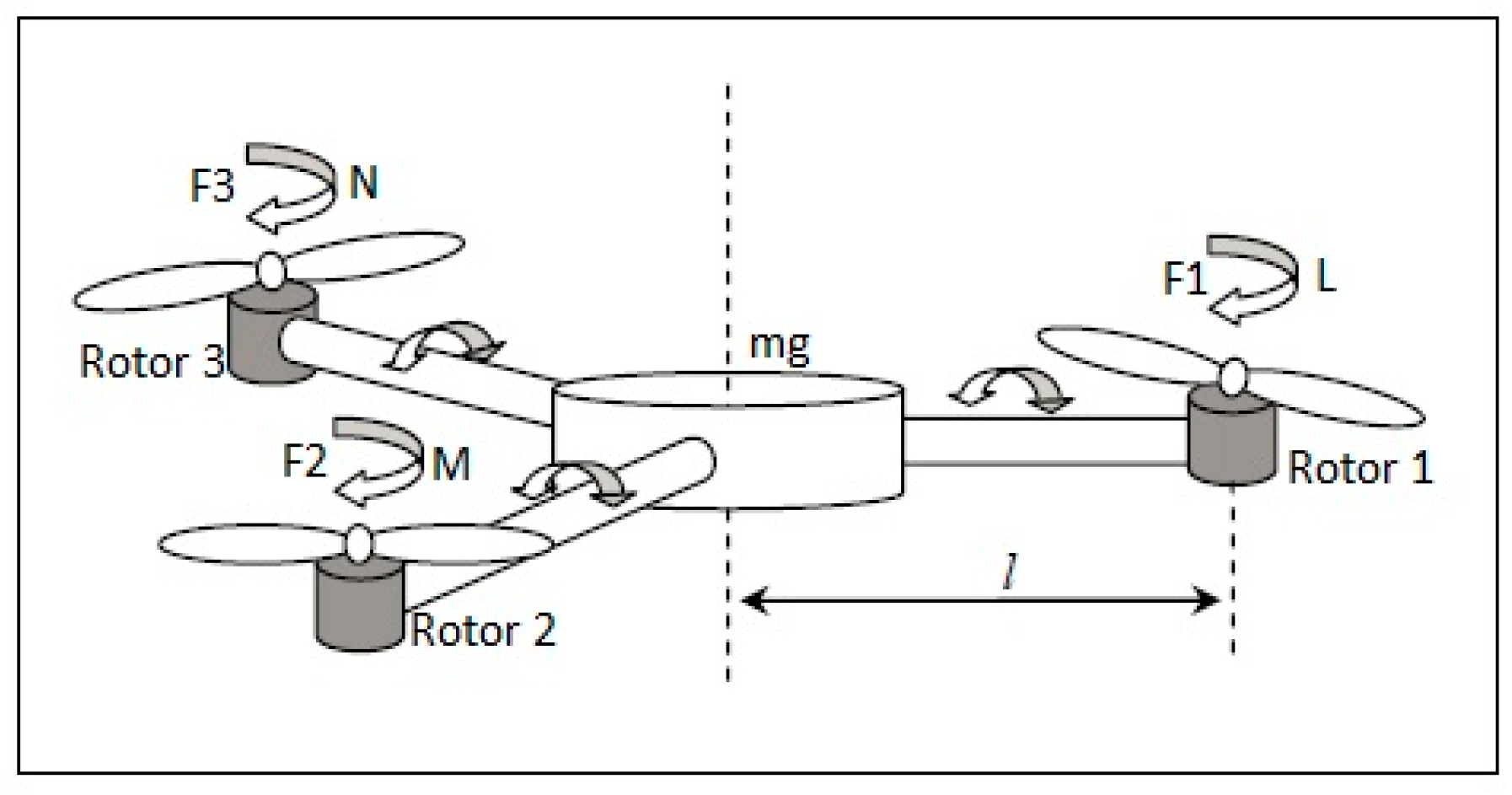
2.1. Tri-Rotor Modeling
2.2. Dynamic Representation of a Tri-Rotor UAV
2.3. Main Engine (Electric Motors)
3. Designing of Controller
3.1. Tri-Rotor Dynamic Control Strategies
- When moving clockwise roll 2 1 3.
- When moving counter-clockwise roll 2 1 3.
- When nose-up 2 3 1.
- When nose-down 2 3 1.
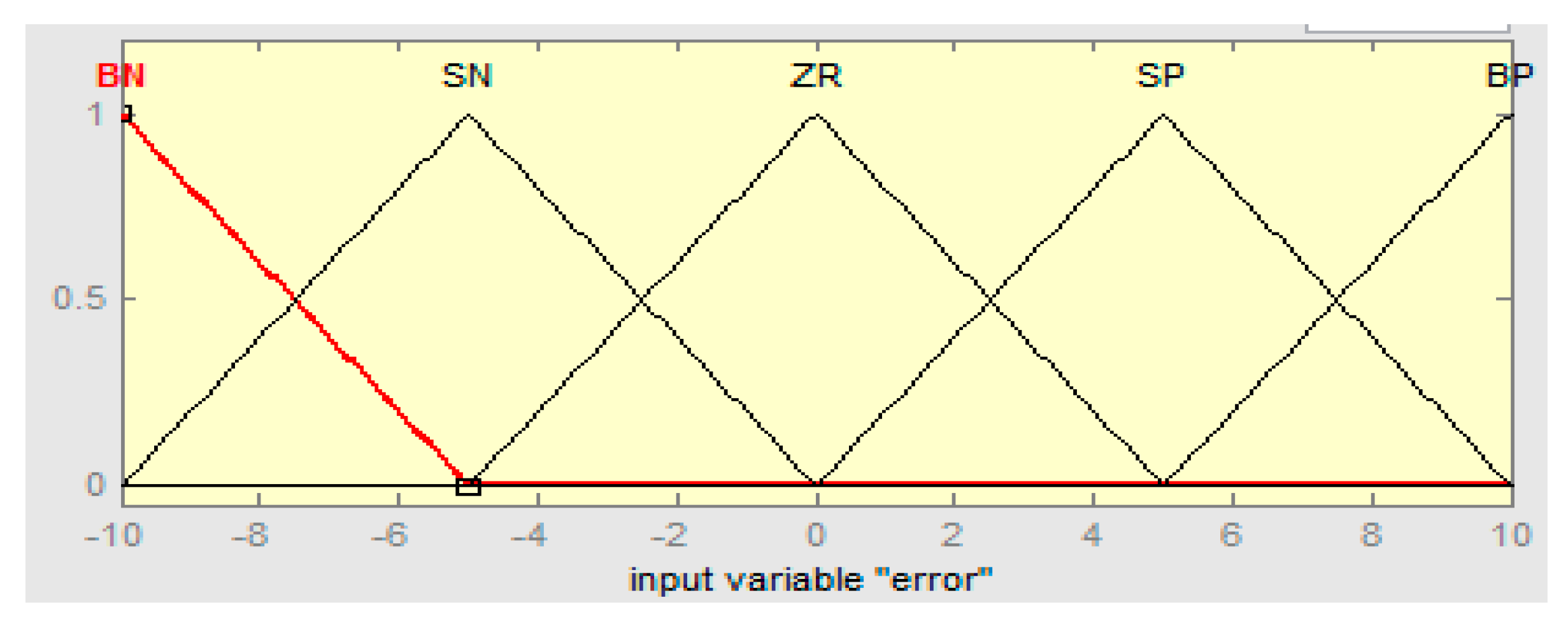
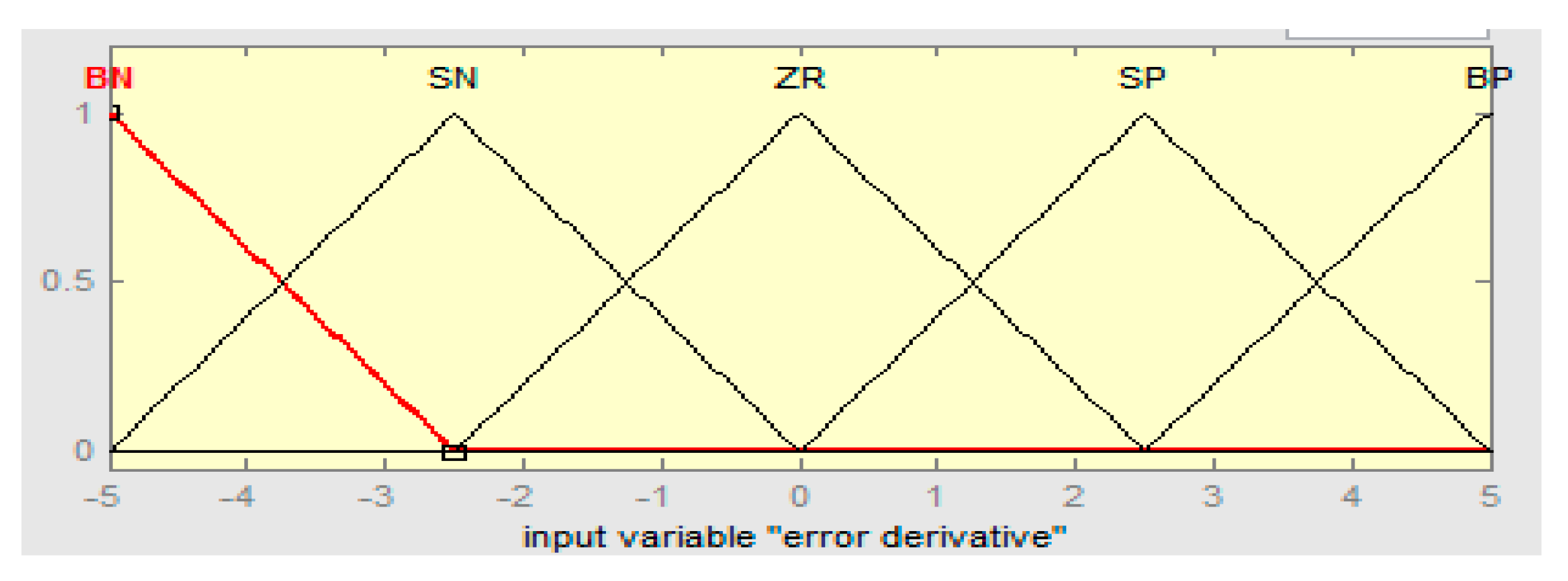
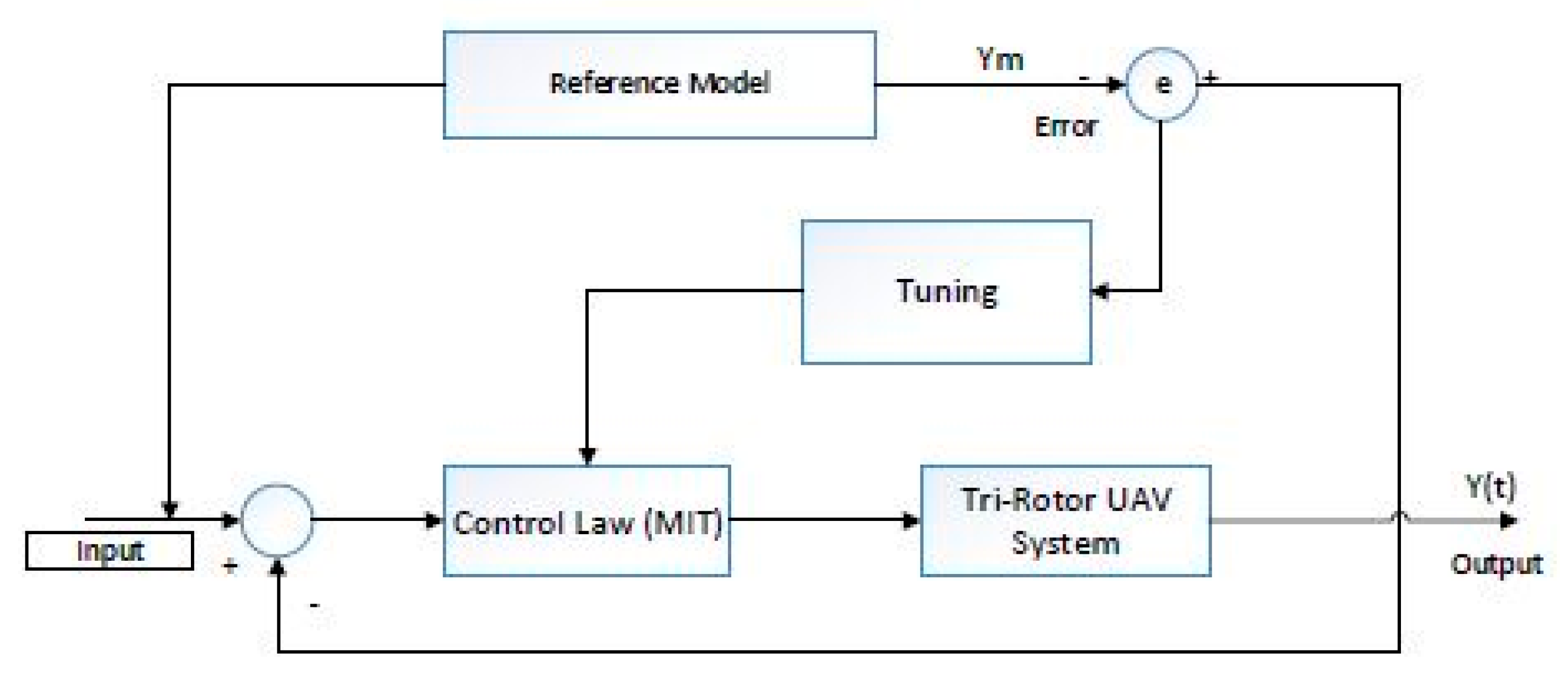
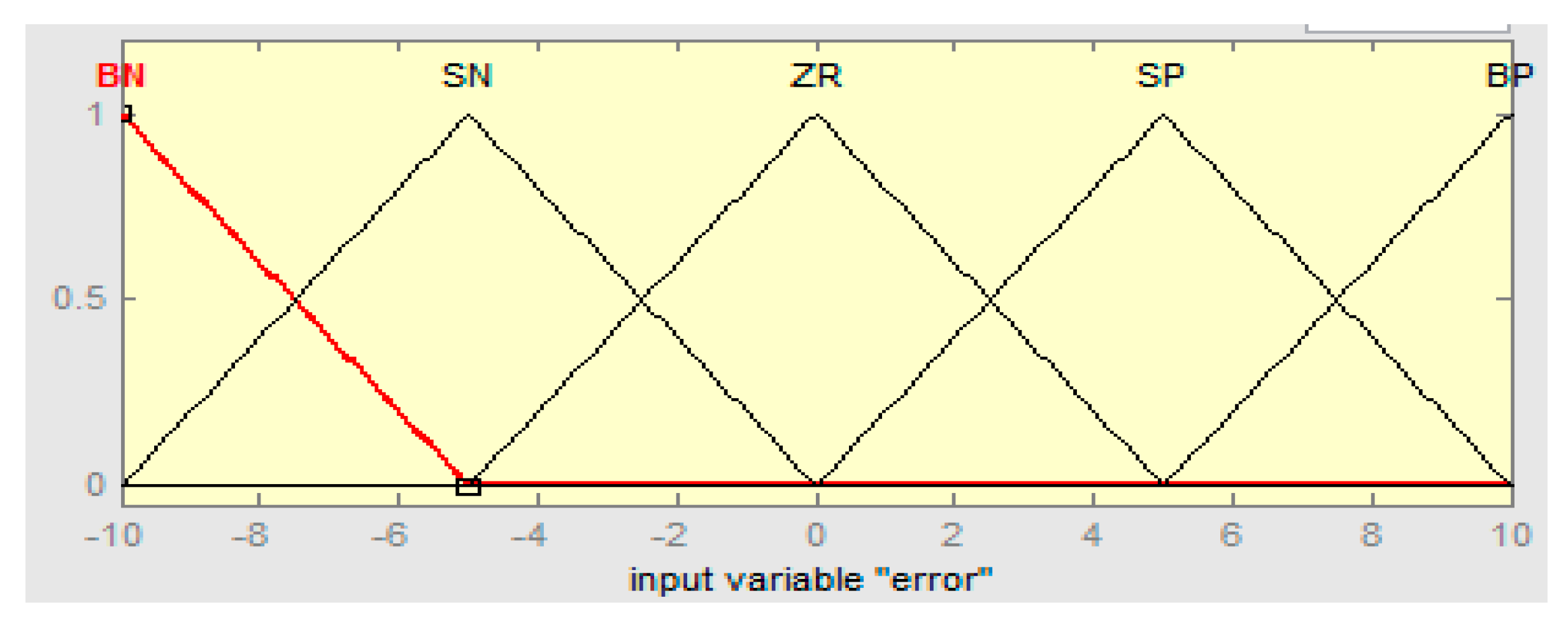
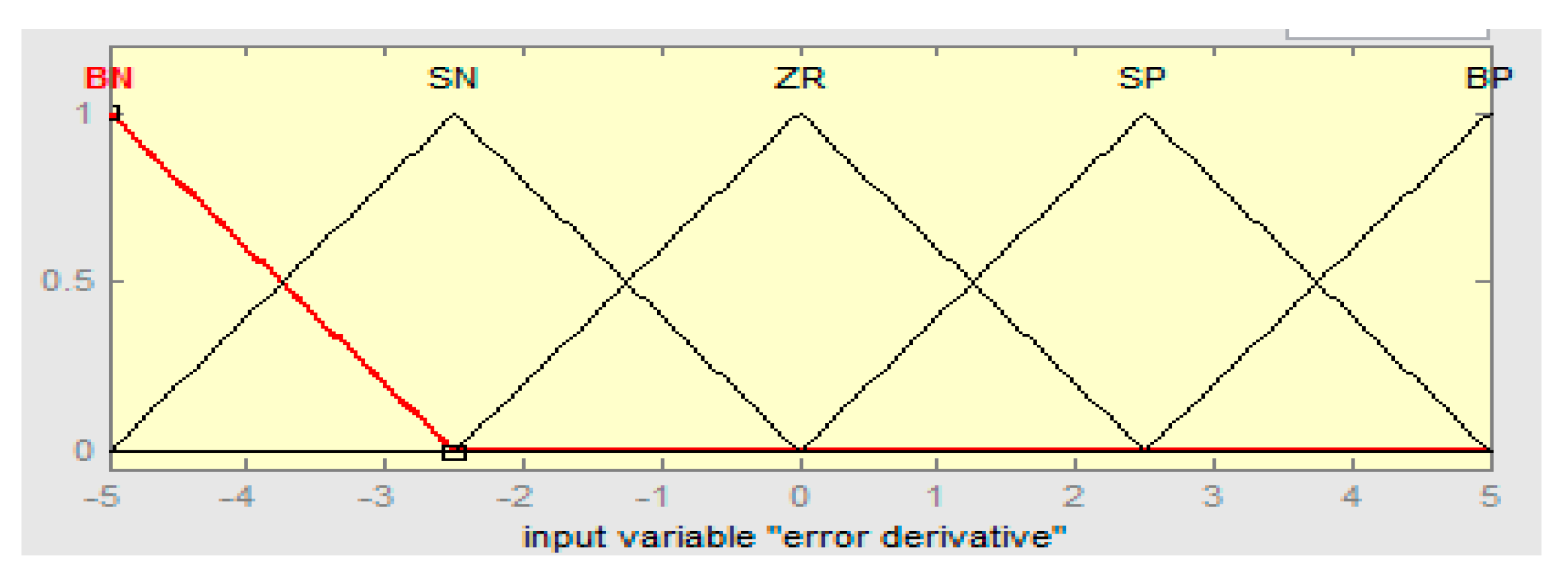
3.2. Control Algorithm
- If as and leading , the solution gives the smallest positive value of cost function.
- is a contradiction, if it is not stable from Theorem 2; as , thus . This is not optimal because, as seen in step 1 of the proof, there exists a solution that makes.
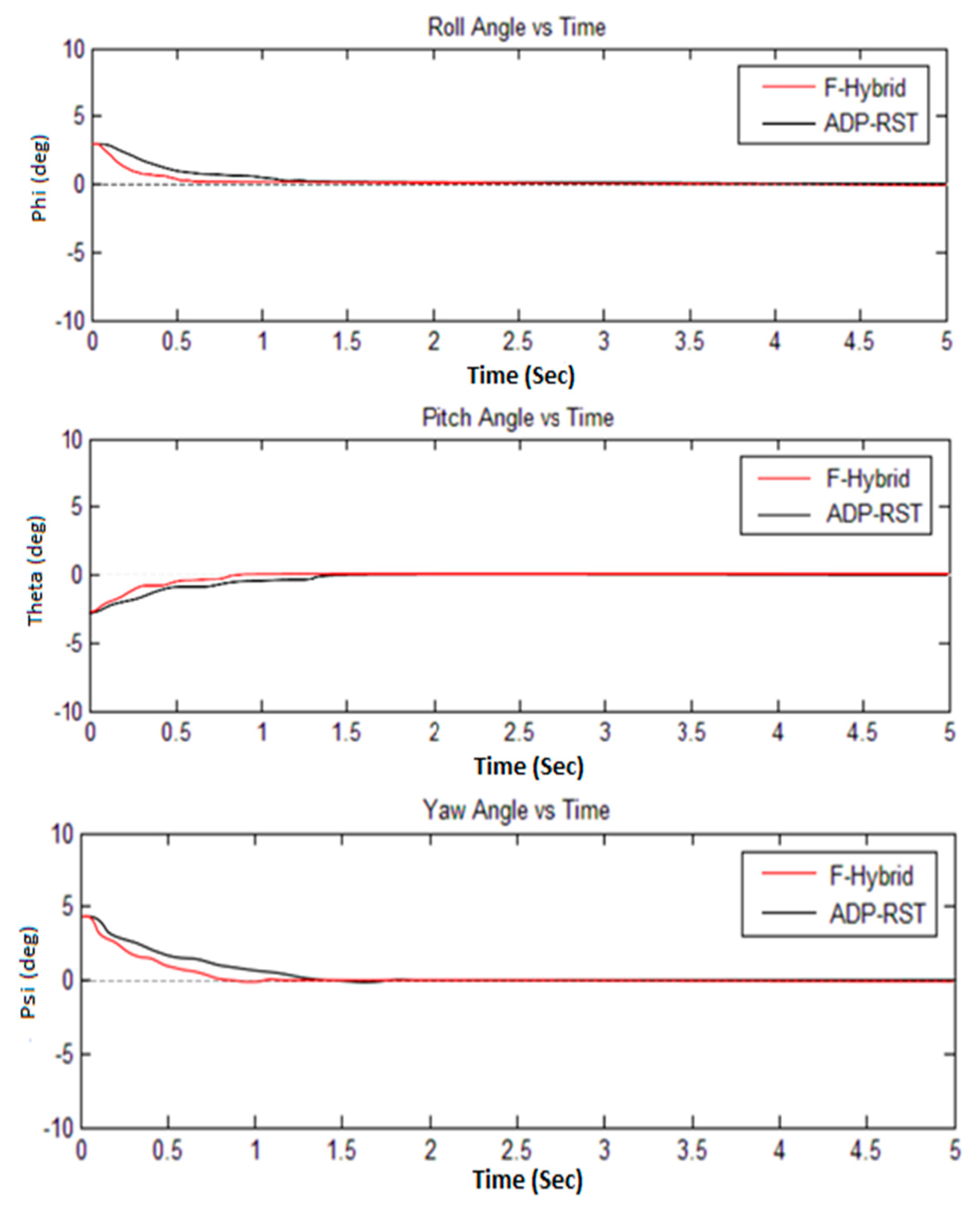
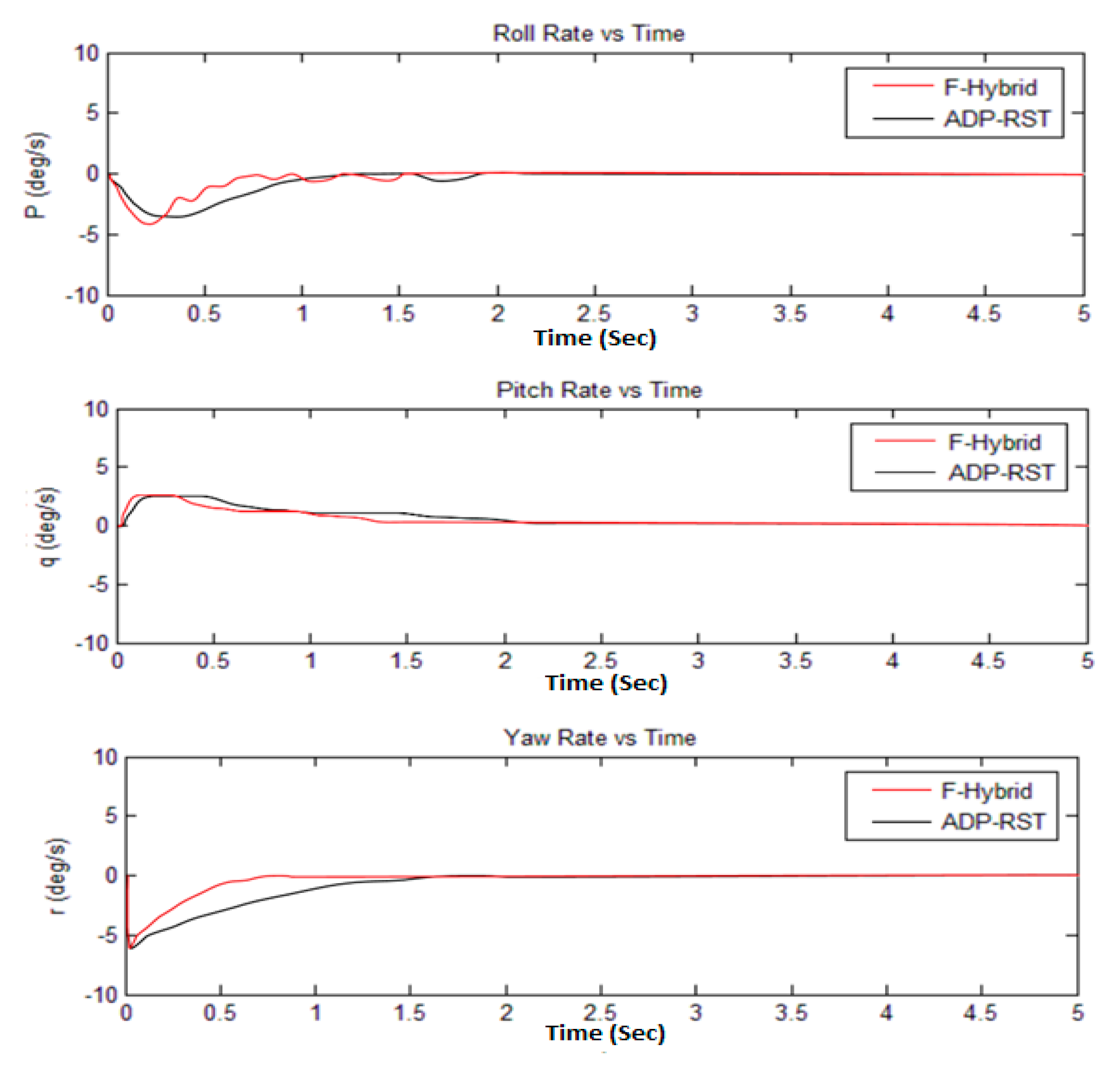
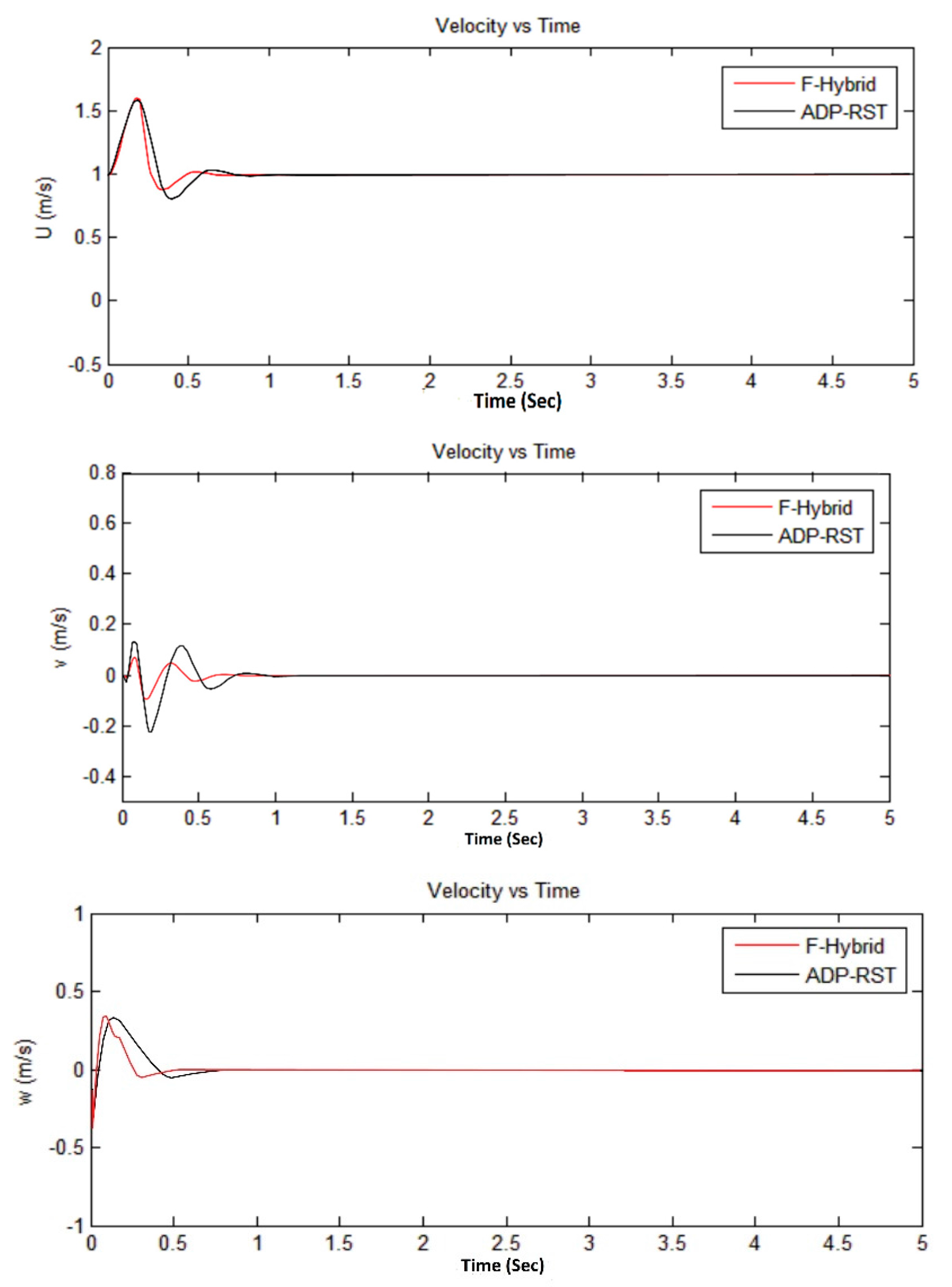
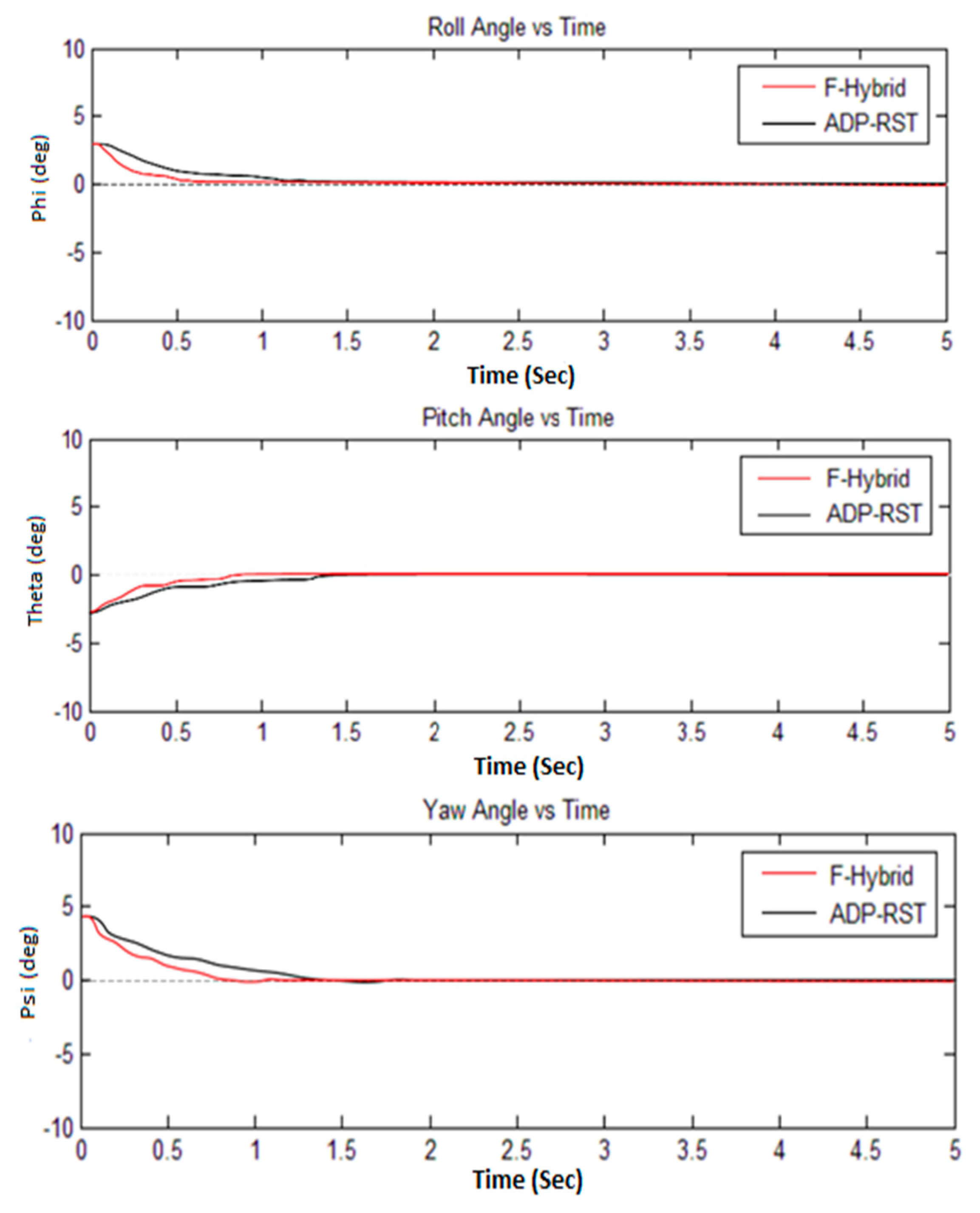
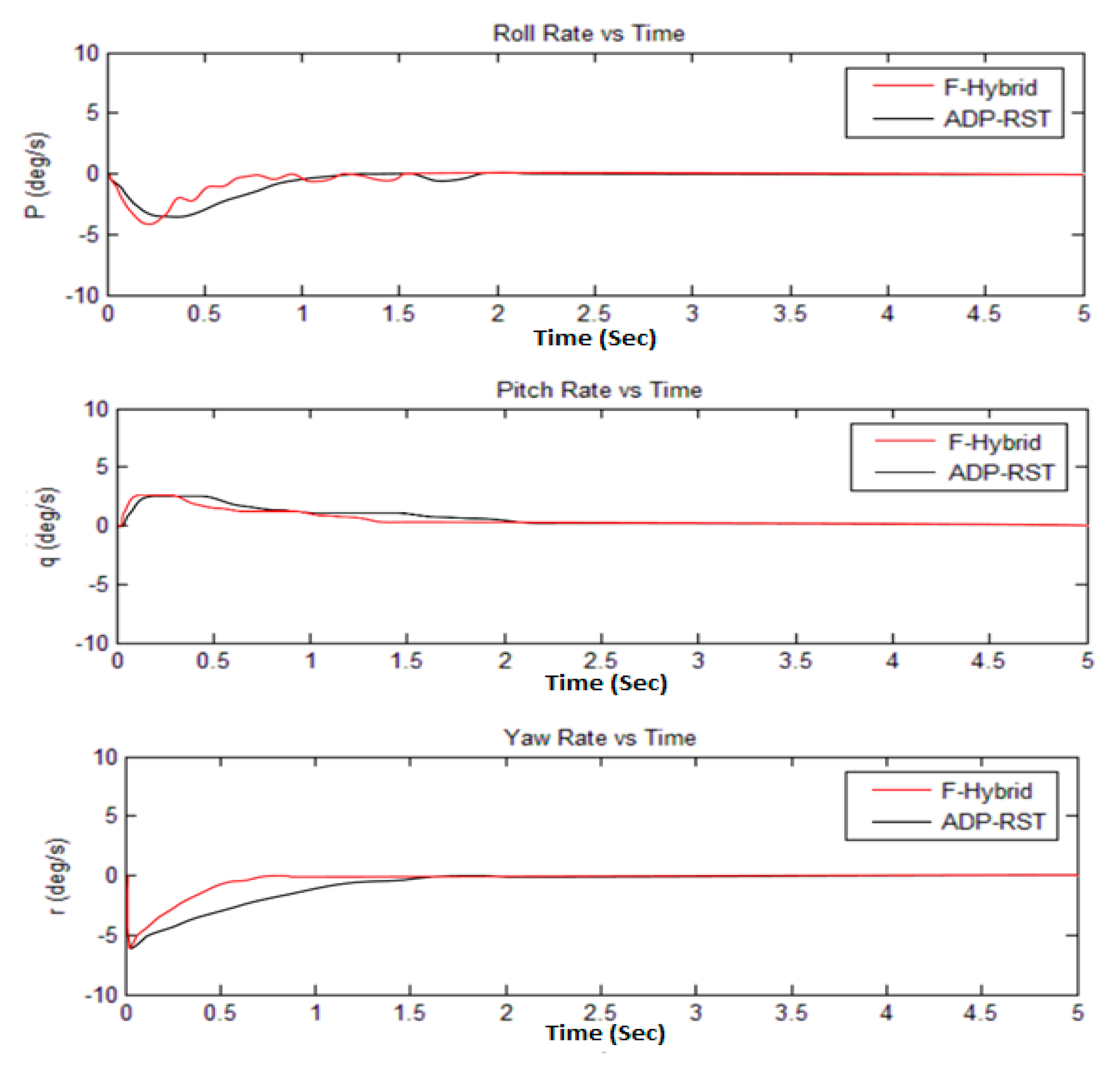
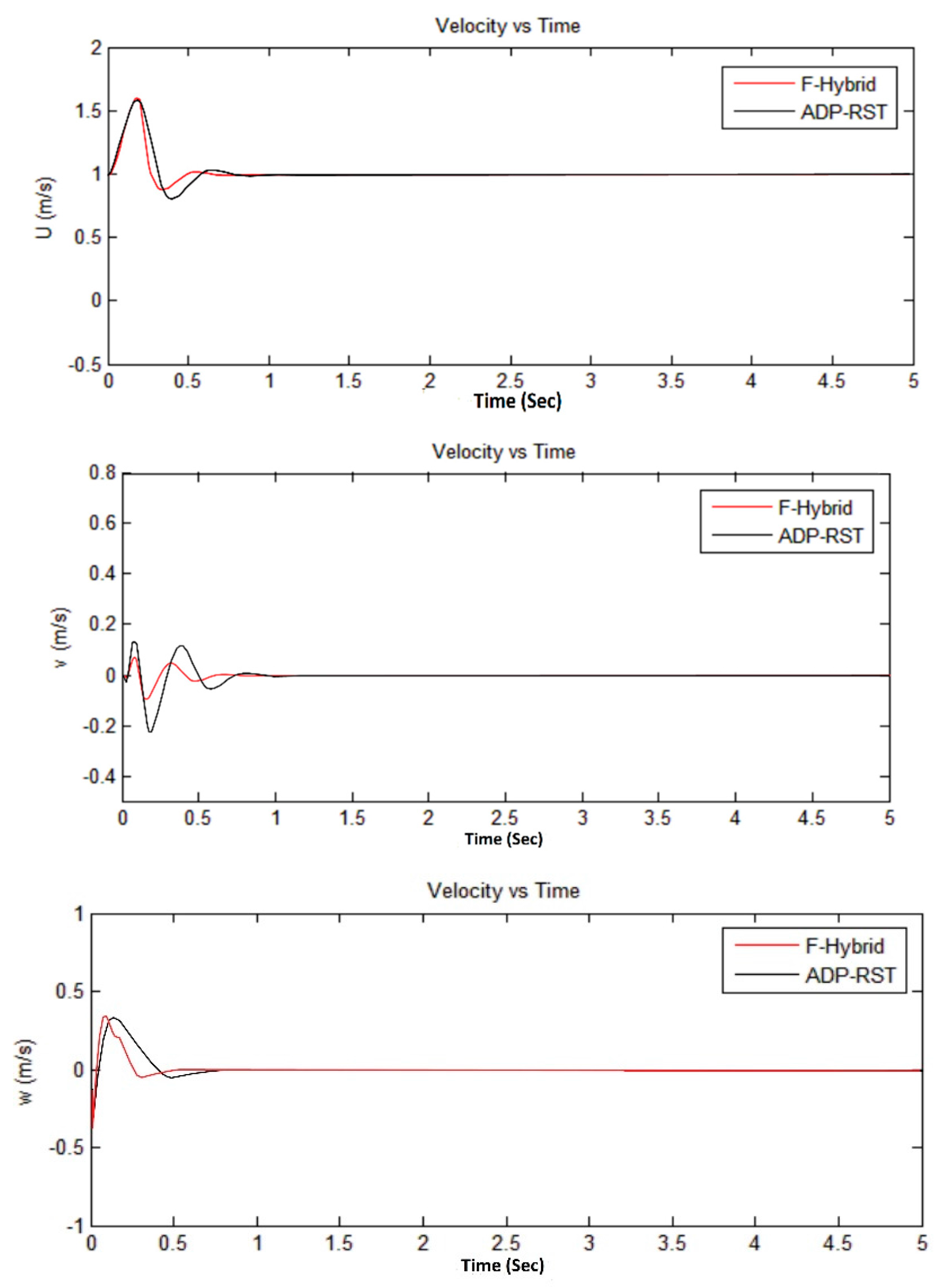
4. Simulation Results and Discussions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yoon, S.; Lee, S.J.; Lee, B.; Kim, C.J.; Lee, Y.J.; Sung, S. Design and flight test of a small Tri-rotor unmanned vehicle with a LQR based onboard attitude control system. Int. J. Innov. Comput. Inf. Control 2013, 9, 2347–2360. [Google Scholar]
- Jones, P.; Ludington, B.; Reimann, J.; Vachtsevanos, G. Intelligent Control of Unmanned Aerial Vehicles for Improved Autonomy. Eur. J. Control 2007, 13, 320–333. [Google Scholar] [CrossRef]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Tayebi, A.; McGilvray, S. Attitude stabilization of a four-rotor aerial robot. In Proceedings of the IEEE Conference on Decision and Control, Paradise Island, Bahamas, 14–17 December 2004; Volume 2, pp. 1216–1221.
- Salazar-cruz, S.; Kendoul, F.; Lozano, R.; Fantoni, I. Real-Time Stabilization of a Small Three-Rotor Aircraft. IEEE Trans. Aerosp. Electr. Syst. 2008, 44, 783–794. [Google Scholar] [CrossRef]
- Guenard, N.; Hamel, T.; Moreau, V. Dynamic modeling and intuitive control strategy for an “X4-flyer”. In Proceedings of the International Conference on Control and Automation, Hungarian Academy of Science, Budapest, Hungary, 26–29 June 2005; Volume 1, pp. 141–146.
- Yoo, D.-W.; Oh, H.-D.; Won, D.-Y.; Tahk, M.-J. Dynamic Modeling and Stabilization Techniques for Tri-Rotor Unmanned Aerial Vehicles. Int. J. Aeronaut. Space Sci. 2010, 11, 167–174. [Google Scholar] [CrossRef]
- Benallegue, A.; Mokhtari, A.; Fridman, L. High-order sliding-mode observer for a quadrotor UAV. Int. J. Robust Nonlinear Control 2008, 18, 427–440. [Google Scholar] [CrossRef]
- Kim, J. Model-Error Control Synthesis: A New Approach to Robust Control. Ph.D. Thesis, Texas A&M University, USA, 2002. [Google Scholar]
- Castillo, P.; Lozano, R.; Dzul, A. Modelling and Control of Mini-Flying Machines; Springer-Verlag London: London, UK, 2005. [Google Scholar]
- Desa, H.; Ahmed, S.F. Adaptive Hybrid Control Algorithm Design for Attitude Stabilization of Quadrotor (UAV). Arch. Des Sci. 2013, 66, 51–64. [Google Scholar]
- Mohammadi, M.; Shahri, A.M. Adaptive Nonlinear Stabilization Control for a Quadrotor UAV: Theory, Simulation and Experimentation. J. Intell. Robot. Syst. 2013, 72, 105–122. [Google Scholar] [CrossRef]
- Dydek, Z.T.; Annaswamy, A.M. Adaptive Control of Quadrotor UAVs in the Presence of Actuator Uncertainties. In Proceedings of the AIAA Guidance, Navigation, and Control Conference 2010, Atlanta, Georgia, 20–22 April 2010.
- Sadeghzadeh, I.; Mehta, A.; Zhang, Y. Fault/Damage Tolerant Control of a Quadrotor Helicopter UAV Using Model Reference Adaptive Control and Gain-Scheduled PID. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, Oregon, 8–11 August 2011.
- Chadlia, M.; Aouaoudab, S.; Karimic, H.R.; Shid, P. Robust fault tolerant tracking controller design for a VTOL aircraft. J. Frankl. Inst. 2013, 350, 2627–2645. [Google Scholar] [CrossRef]
- Aouaouda, S.; Chadli, M.; Karimi, H.-R. Robust static output-feedback controller design against sensor failure for vehicle dynamics. In Proceedings of the IET Control Theory & Applications, 12 June 2014; Volume 8, pp. 728–737. [CrossRef]
- Chiou, J.S.; Tran, H.K.; Peng, S.T. Attitude control of a single tilt tri-rotor UAV SYSTEM: Dynamic modeling and each channel’s nonlinear controllers design. Math. Probl. Eng. 2013, 2. [Google Scholar] [CrossRef] [PubMed]
- Yeh, F.K.; Huang, C.W.; Huang, J.J. Adaptive fuzzy sliding-mode control for a mini-UAV with propellers. In Proceedings of the InSICE Annual Conference (SICE), Tokyo, Japan, 13–18 September 2011; pp. 645–650.
- Chiou, J.S.; Tran, H.K.; Peng, S.T. Design Hybrid Evolutionary PSO Aiding Miniature Aerial Vehicle Controllers. Math. Probl. Eng. 2015, 12. [Google Scholar] [CrossRef]
- Ali, Z.A.; Wang, D.; Javed, R.; Aklbar, A. Modeling & Controlling the Dynamics of Tri-rotor UAV Using Robust RST Controller with MRAC Adaptive Algorithm. Int. J. Control Autom. 2016, 9, 61–76. [Google Scholar]
- Cuenca, A.; Salt, J. RST controller design for a non-uniform multi-rate control system. J. Process Control 2012, 22, 1865–1877. [Google Scholar] [CrossRef]
- Landau, I.D. The R-S-T digital controller design and applications. Control Eng. Pract. 1998, 6, 155–165. [Google Scholar] [CrossRef]
- Stevens, B.L.; Lewis, F.L. Aircraft Control and Simulation; Wileys: New York, NY, USA, 1992. [Google Scholar]
- Padfield, G.D. The Theory and Application of Flying Qualities and Simulation Modeling. In Helicopter Flight Dynamics; AIAA: Education Series, Washington, DC, 1996. [Google Scholar]
- Deuflhard, P. Newton Methods for Nonlinear Problems, 1st ed.; Springer: Berlin, Germany, 2005. [Google Scholar]
- Weihua, Z.; Go, T.H. Robust decentralized formation flight control. Int. J. Aerosp. Eng. 2011. [Google Scholar] [CrossRef]
- Mohamed, K.M. Design and Control of UAV Systems: A Tri-Rotor UAV Case Study. Ph.D. Thesis, The University of Manchester, Manchester, UK, 31 October 2012. [Google Scholar]
- Shanmugasundram, R.; Zakaraiah, K.M.; Yadaiah, N. Modeling, simulation and analysis of controllers for brushless direct current motor drives. J. Vib. Control 2012. [Google Scholar] [CrossRef]
- Sincero, G.; Cros, J.; Viarouge, P. Efficient simulation method for comparison of brush and brushless DC motors for light traction application. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10.
- Mamdani, E.H. Application of fuzzy logic to approximate reasoning using linguistic synthesis. IEEE Trans. Comput. 1977, 100, 1182–1191. [Google Scholar] [CrossRef]
- Passino, K.M.; Yurkovich, S. Fuzzy Control by Addison-Wesley: Reading, PA, USA, 1998.
- Mamdani, E.H. Application of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. 1974, 121, 1585–1588. [Google Scholar] [CrossRef]
- Salt, J.; Sala, A.; Albertos, P. A transfer-function approach to dual-rate controller design for unstable and non-minimum-phase plants. IEEE Trans. Control Syst. Technol. 2011, 19, 1186–1194. [Google Scholar] [CrossRef]
- Astrom, K.J.; Wittenmark, B. Computer-Controlled Systems: Theory and Design; Prentice Hall: Englewood Cliffs, NJ, USA, 1984. [Google Scholar]
- Salt, J.; Albertos, P. Model-based multirate controllers design. IEEE Trans. Control Syst. Technol. 2005, 13, 988–997. [Google Scholar] [CrossRef]
- Schmidt, P. Intelligent model reference adaptive control applied to motion control. In Proceedings of the Record of the 1995 IEEE Industry Applications Conference Thirtieth IAS Annual Meeting IAS-95, Orlando, FL, USA, 8–12 October 1995.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x, y, z Axis System | Roll (φ) | Pitch (θ) | Yaw (ψ) |
|---|---|---|---|
| Aerodynamic Force Components | X | Y | Z |
| Aerodynamic Moment Components | L | M | N |
| Translational Velocity | U | V | W |
| Angular Rates | p | q | r |
| Three-Axis Inertia | Ix | Iy | Iz |
| BN | SN | ZR | SP | BP | |
|---|---|---|---|---|---|
| BN | ZR | SP | MP | MP | SP |
| SN | SP | SP | SP | MP | MP |
| ZR | SP | MP | MP | MP | MP |
| SP | SP | SP | MP | SP | SP |
| BP | ZR | SP | MP | LP | S |
| BN | SN | ZR | SP | BP | |
|---|---|---|---|---|---|
| BN | ZR | ZR | SP | BP | BP |
| SN | ZR | SP | SP | SP | BP |
| ZR | ZR | SP | SP | SP | BP |
| SP | ZR | SP | SP | SP | BP |
| BP | ZR | ZR | SP | SP | BP |
| BN | SN | ZR | SP | BP | |
|---|---|---|---|---|---|
| BN | SP | SP | ZR | ZR | ZR |
| SN | BP | SP | SP | SP | BP |
| ZR | BP | SP | SP | SP | BP |
| SP | BP | SP | SP | SP | SP |
| BP | BP | BP | BP | SP | SP |
| Parameters | Values | Si Units |
|---|---|---|
| Ix | 0.3105 | kg·m2 |
| Iy | 0.2112 | kg·m2 |
| Iz | 0.2215 | kg·m2 |
| l | 0.3050 | m |
| Mass | 0.785 | kg |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, Z.A.; Wang, D.; Aamir, M. Fuzzy-Based Hybrid Control Algorithm for the Stabilization of a Tri-Rotor UAV. Sensors 2016, 16, 652. https://doi.org/10.3390/s16050652
Ali ZA, Wang D, Aamir M. Fuzzy-Based Hybrid Control Algorithm for the Stabilization of a Tri-Rotor UAV. Sensors. 2016; 16(5):652. https://doi.org/10.3390/s16050652
Chicago/Turabian StyleAli, Zain Anwar, Daobo Wang, and Muhammad Aamir. 2016. "Fuzzy-Based Hybrid Control Algorithm for the Stabilization of a Tri-Rotor UAV" Sensors 16, no. 5: 652. https://doi.org/10.3390/s16050652