1. Introduction
Acoustic and optical 3D systems are widely used to collect 3D information in underwater applications, such as 3D reconstruction of submerged archaeological sites, seabed mapping, or Remotely Operated underwater Vehicle (ROV) navigation [
1,
2,
3]. Acoustic systems typically give good results in long-range acquisitions and do not suffer from turbidity, but the resulting 3D data are affected by low resolution and accuracy. Optical systems, in contrast, are more suited for close-range acquisitions and allow for gathering high-resolution, accurate 3D data and textures, but the results are strongly influenced by the visibility conditions. Therefore, the integration of 3D data captured by these two types of systems is a promising technique in underwater applications, as it allows for compensating their respective limitations.
Despite the difficulty of combining two modalities that operate at different resolutions, the integration of optical and acoustic systems in an underwater environment has received increasing attention over the past few years, mainly for seabed mapping and egomotion estimation of underwater vehicles [
4,
5,
6,
7,
8,
9]. Further examples of opto-acoustic integration concern with local area imaging rather than the creation of large area maps. In [
10,
11,
12], the integration of video and 3D data, acquired through a single optical camera and a 3D acoustic camera (Echoscope 1600) [
13], is obtained by geometrically registering such data with respect to a well-known model of the observed scene, while in [
14,
15,
16,
17,
18] the authors propose a new paradigm of opto-acoustic stereo reconstruction that aims to apply the epipolar geometry to a stereo system composed by an optical camera and a 2D sonar (DIDSON).
Up to now, the works presented in the literature about the integration between several types of sonar (single beam sounder, multibeam, 3D acoustic camera) and optical cameras, adopt a sensor fusion approach, which is mapping-oriented, according to the classification proposed in [
19]. This means that the data acquired from the two sensors are described through geometric relationships (position and orientation), and the data integration is performed by means of geometrical correspondences and registration. Data alignment, that is, their transformation from each sensor’s local frame into a common reference frame, is a crucial problem of these methods that is usually solved by performing the exterior orientation of the integrated system,
i.e., by searching for the rigid transformation between the coordinate systems related to each sensor.
Few works have explicitly treated the alignment problem of opto-acoustic underwater systems. They showed that the methods are highly dependent on the layout and sensors that compose the system, in particular for the type of data structure they provide. In [
16], the exterior orientation of the optical camera and the 2D sonar is performed by using a planar grid characterized by considerable optical and acoustic features that are manually associated. Therefore, the relative positions of the cameras are estimated through an optimization algorithm that minimizes the distances between 3D reconstructions of optical and acoustic matching projections.
In [
20], the authors propose a method for aligning a single camera with a multibeam sonar on an Autonomous Underwater Vehicle (AUV) using a target placed in a test tank. Assuming a simplified model for the multibeam sonar, the exterior orientation of the proposed opto-acoustic system was compared to the alignment of a laser-camera system, where the method presented in [
21] was adopted for its solution.
Finally, a different methodology is presented in [
12]. After some pre-processing steps, the acoustic data are registered with respect to a CAD model of a target (an oil rig in this case) using the Iterative Closest Point (ICP) algorithm [
22], while the optical alignment is performed by means of the algorithm proposed in [
23]. Once the poses of both sensors are calculated with respect to the observed object, the relative pose between the optical camera and the acoustic camera can be estimated without the need to use positioning and motion system equipment.
The Echoscope 3D acoustic camera is an interesting sonar which, unlike other sonars, ensonifies a whole viewing volume with a single ping and outputs 3D data in real-time as 3D point clouds. Therefore, it is suitable to be coupled with optical devices as it provides whole field 3D data from a single acquisition, unlike other devices such as multibeam sonars that acquire multiple slices and stitches them together according to navigation data. In previous works, 3D acoustic cameras have been used for on-line 3D reconstruction of underwater environments from multiple range views [
24], or coupled with a single camera to improve the understanding of the underwater scenes and assist the ROV pilots during the navigation [
10,
11,
12].
In the present work, for the first time, the same 3D acoustic camera used in [
10,
11,
12] has been coupled with a stereovision system to gather synchronous 3D data and perform 3D opto-acoustic imaging of the acquired underwater scene. The system was conceived to improve the understanding of a human operator guiding an underwater ROV during the navigation in variable turbid water conditions and in operations that require the use of one or two manipulators. The stereo optical camera allows for obtaining a better perception of the scene depth if compared to the use of a single camera as in the actual ROV configuration, while the acoustic camera makes its best contribution in poor visibility conditions. Compared to the similar setup previously described in literature [
10,
11,
12], the novelty of the proposed approach lies in the adoption of a stereo optical camera that give us the possibility to have a better resolution of the 3D image when the visibility conditions are good enough for optical sensors; moreover, it allows us to overcome the problem of processing heterogeneous data gathered from different sensors by simplifying the correspondence determination in a registration problem of the two 3D point clouds.
The aim of this work is to solve the problem of the automatic alignment of the optical and acoustic 3D images through the definition of a multi-sensor registration approach [
25]. The core idea of the method is:
obtaining a raw estimation of the unknown geometric transformation through a registration of the optical and acoustic 3D data for each pose of a custom orientation fixture;
obtaining a robust and optimal estimation through a statistical processing of the transformations computed for each pose.
Experimental tests have been conducted in laboratory to validate the feasibility and the effectiveness of the proposed method and quantify the accuracy of the integration. These also gave us the opportunity to perform a first experimentation of the proposed 3D opto-acoustic camera, allowing for a better understanding of limitations and drawbacks of the system, and of the problems related to the alignment itself. The experimental results show that our alignment approach, based on several pose acquisitions of an appropriate rig, can be adopted to simultaneously calibrate the stereo optical system and estimate the rigid transformation between the optical and acoustic sensors. The effectiveness of the method has been demonstrated in this first experimentation of the proposed 3D opto-acoustic camera.
2. Relative Orientation of the Opto-Acoustic 3D Camera
To effectively integrate and fuse spatial data from different 3D sensors, the relative position and orientation of their spatial coordinate systems have to be known. The estimate of such spatial relationships can be broken down into two tasks: interior orientation, where internal sensor parameters are determined, and relative orientation, where the position and the orientation of a sensor relative to a given coordinate system are determined.
Assuming that a point
of the stereo-optical reference frame corresponds to a point
of the acoustic reference frame, the main goal of our multi-sensor alignment is to determine the rigid transformation
that relates the two coordinate systems. It may be expressed, in homogeneous coordinates, as:
where
R is the orthonormal 3 × 3 matrix that represents the orientation of the acoustic camera to the stereo-optical one, while
t is a three-dimensional vector corresponding to their relative positions.
Our multi-sensor alignment method operates in the following way:
it executes a synchronous optical and acoustic acquisition of a fixture in several poses;
it calculates both the interior and exterior orientation of the stereo optical system;
for each pose of the fixture, it calculates the rigid transformation that relates the sensor reference frames among each other through a registration algorithm;
it processes the transformation matrices through statistical methods;
it calculates the best estimation for the unknown transformation matrix.
2.1. Fixture Design
In the case of a stereo-optical system, the alignment problem can be solved by the optimization of a series of equations in which a collection of correspondent 3D points in both cameras is known. Typically, these data are generated by imaging a fixture that represents a set of 3D points belonging some feature of the target. For example, the centers of a dot pattern and the corners of a checkerboard pattern were used in [
26,
27], respectively. Such a method is difficult to adopt in the opto-acoustic alignment, because a point-to-point correspondence between 3D points in both representations is not a simple task,
i.e., the low resolution and the strong noise component of acoustic data do not allow for precisely localizing a point position as determined for the optical camera, as demonstrated in [
2,
20]. Therefore, it is necessary to find other features fit for establishing the correspondence between optical and acoustic frames.
Photogrammetric methods that employ a stereo setup acquire the scene by means of two optical cameras with known internal geometric characteristics (principal point, principal distance, and distortion function) and known relative orientation to each other. These are obtained through calibration, according to the selected camera model. Although in underwater environment the well-known pinhole camera limits the reliability and accuracy of the obtained results, as the effects of refraction must be corrected (or modeled) to obtain an accurate calibration [
28], we have chosen to use the method proposed in [
27] to calibrate the stereovision system. The main advantages of this approach are the simplicity of the calibration fixture and the rapid measurement and processing of the captured images, made possible by the automatic recognition of the checkerboard pattern. However, as reported in [
28], this calibration procedure is suitable for applications with modest accuracy requirements, like in our case.
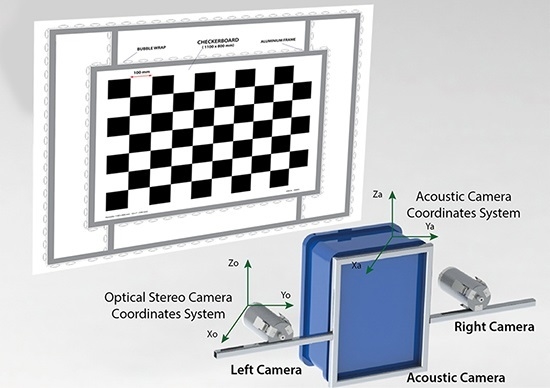
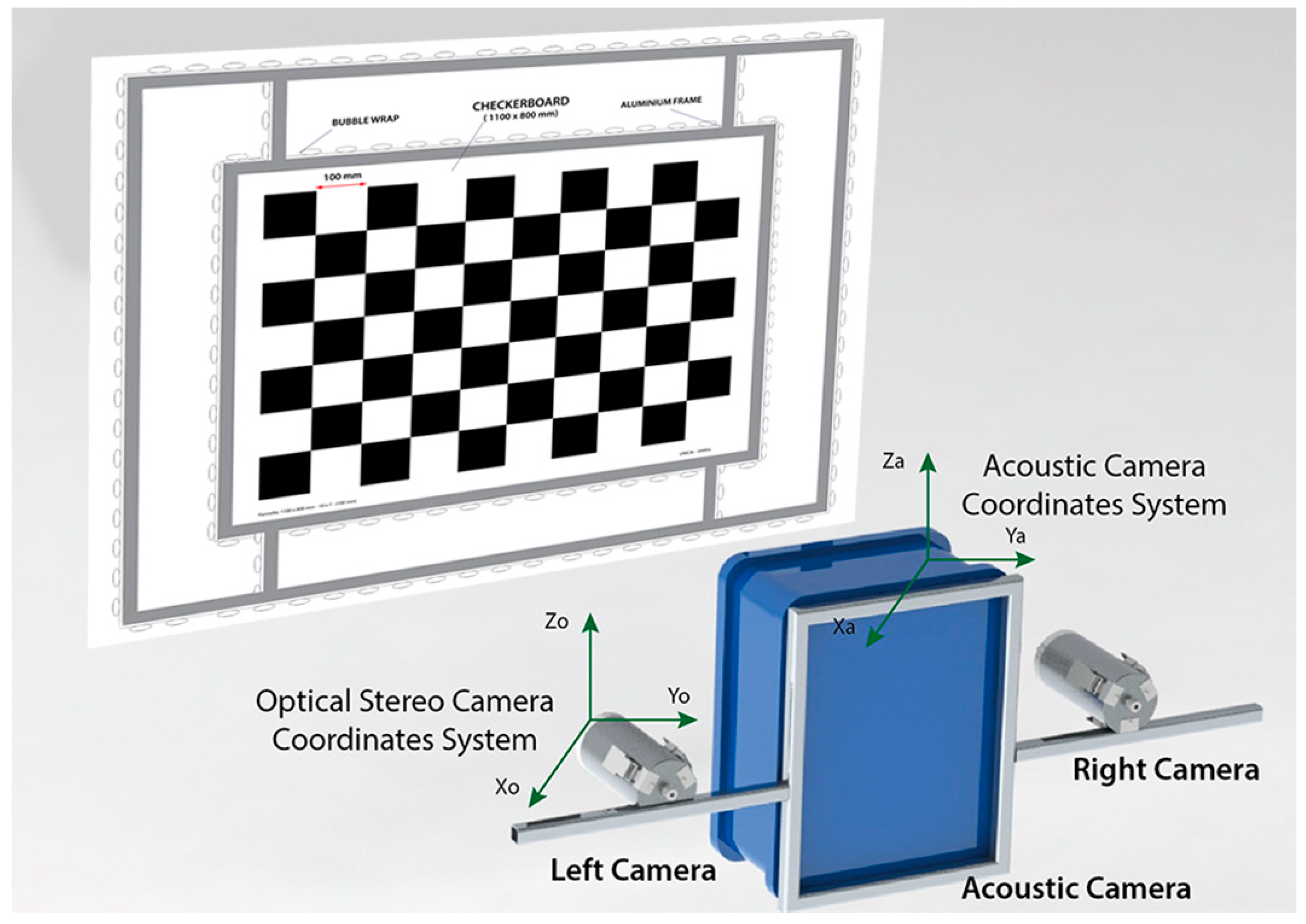
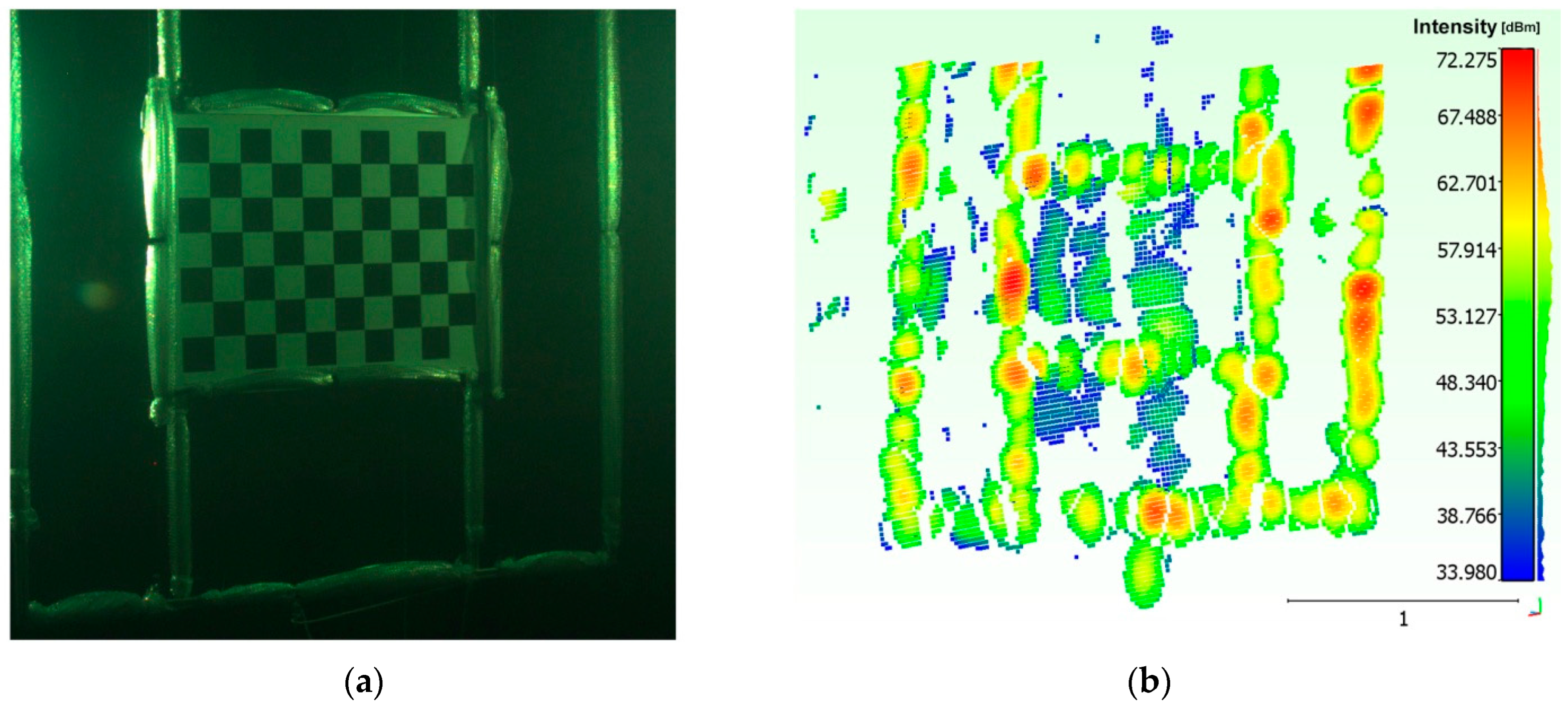
Taking into account that the reflective properties of the optical and acoustic signals vary according to the materials to be used, we have designed a fixture that has to satisfy the following requirements: (a) it allows for detecting geometric features in both systems; (b) it is able to discriminate or highlight areas on the rig; (c) it can be used for both opto-acoustic alignment and optical stereo calibration, simultaneously. Moreover, our underwater fixture has to satisfy several application-specific requirements, including superior visibility of the calibration markers representing object space points, water resistance of the frame and provisions for convenient deployment and retrieval.
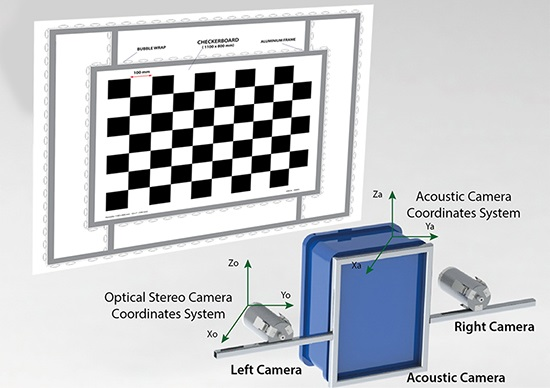
The fixture is composed by a checkerboard panel in the center, built from a thin sheet of aluminum Dibond
® (an acoustically transparent material) and fixed on an aluminum frame to calibrate the optical cameras, then another aluminum frame is placed around the inner frame to concentrate the acoustic detection along the bars. To highlight the rig areas to be detected form the acoustic system, we have thought to exploit the high reflectivity of the air in water, so the aluminum bars were covered by bubble wrap. The designed rig allows for referring both 3D data on a known-size frame and to determine simple features as centroid, normal to the plane, orientation, perimeter, edges (
Figure 1).
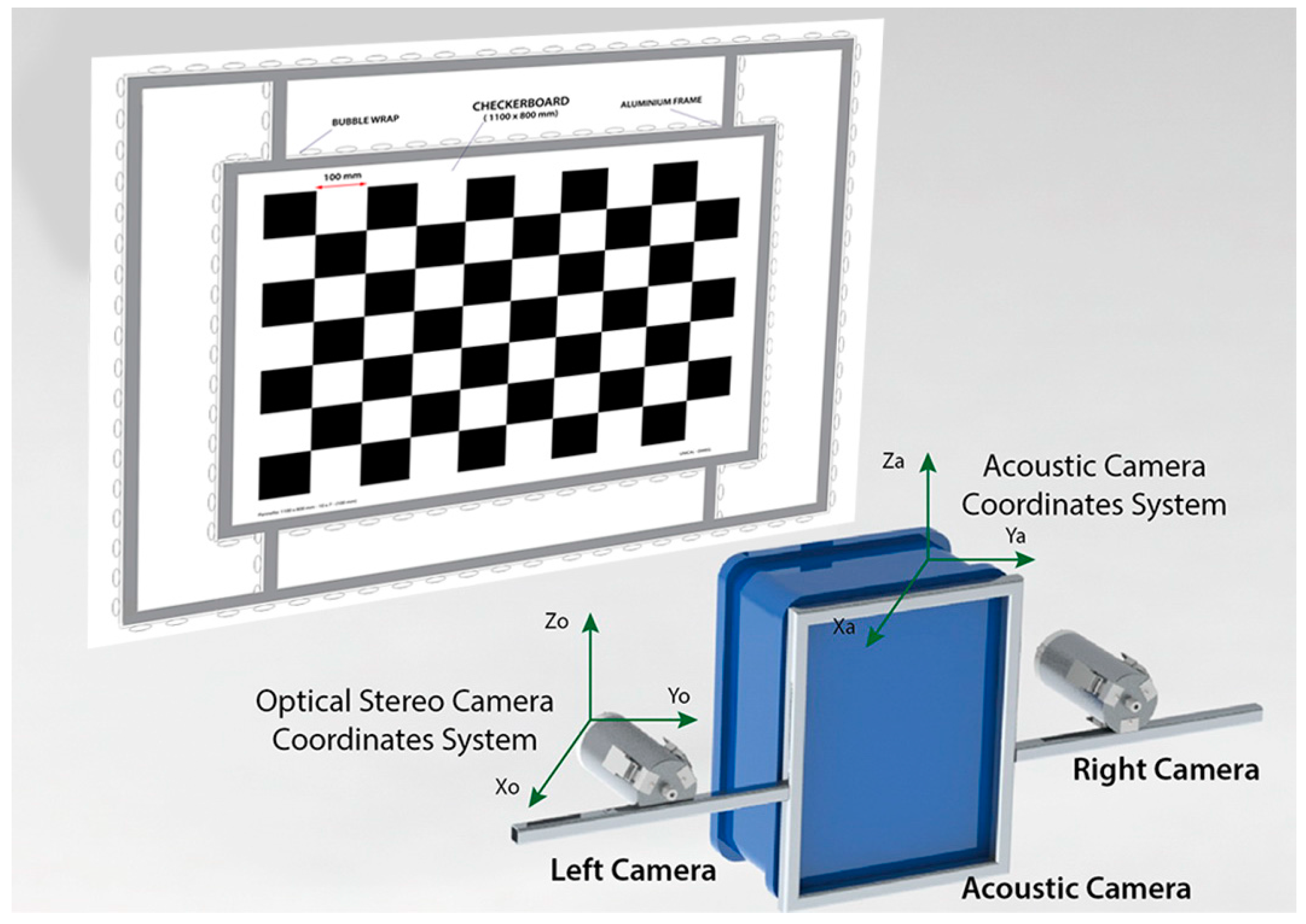
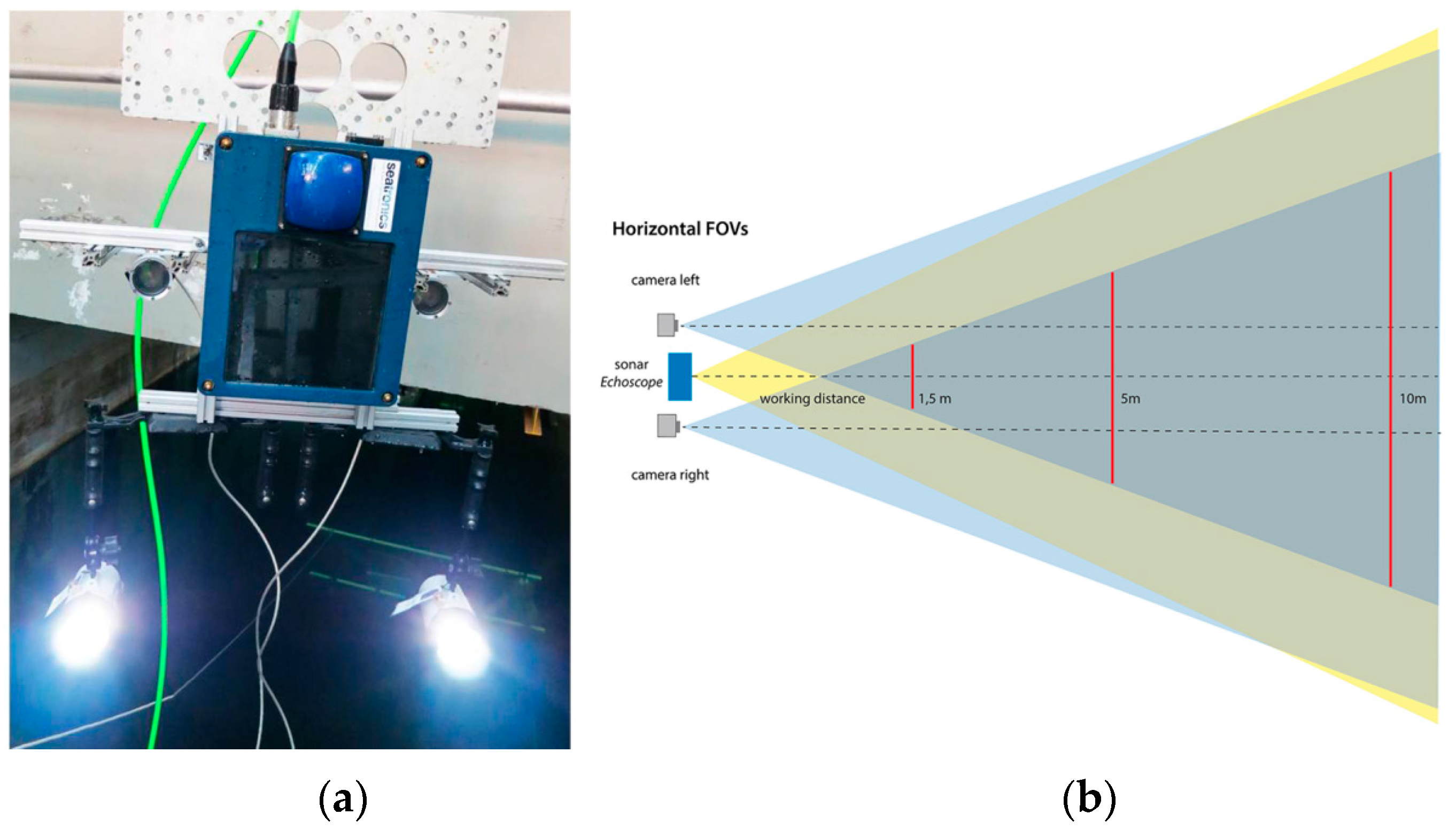
As will be described in
Section 3.2, the size of the rig (2 × 2.5 m) was determined through the analysis of the Fields-Of-Views (FOVs) of the sensors in the expected operative range. Although a 3D fixture could be used to obtain a more accurate results, we have chosen to use a 2D rig for our approach, and to move it in a controlled volume. This choice is motivated by the difficulty to handle and move a three-dimensional structure of such size and with the requirements described above, especially in real conditions.
2.2. Optical and Acoustic Data Registration
Since methods that rely on explicit opto-acoustic correspondences have to be avoided [
2,
20], in our approach the acoustic 3D point clouds representing the orientation rig are matched to the optical counterpart by using the Iterative Closest Point (ICP) algorithm, an iterative least-square technique used for the registration of rigid 3D shapes. This approach eliminates the need to perform any feature extraction or to specify any explicit feature correspondence.
The basic idea behind the ICP algorithm is that, under certain conditions, the point correspondences provided by sets of closest points are reasonable approximations for the true point correspondences. If the process of finding the closest-point sets and then solving the least-square function is iterated, the solution will converge to a local minimum, but there is no guarantee that this will correspond to the actual global minimum.
In our solution, the global convergence is achieved through a data pre-processing to clean up the 3D point clouds from noise or potential outliers, and a coarse registration stage that gives a fairly good initial alignment of the two 3D point clouds.
Therefore, considering the pair of optical and acoustic 3D point clouds, respectively, the associated is determined as a composition of transformations obtained through a coarse and fine registration technique.
Taking as a reference system the local reference frame of the stereo optical camera, the coarse registration stage was carried out through two operations:
calculation of by the orientation of the acoustic camera local reference frame, in such a way that the Z axis represents the depth of the scene, in line with the optical system; this step is necessary because the data acquired by the Echoscope are represented in a local reference system in which the depth of the scene is expressed along the Y axis;
rough alignment of the pair of 3D point clouds that, through an estimate of the centroid of the two 3D point clouds, determines the translation vector t that relates them (assuming that the rotation matrix R is unitary). As a result of this operation, we obtain the transformation matrix .
Concerning the step of fine registration, a Matlab
® implementation of the ICP algorithm has been applied to the pair
aligned in the previous step, to obtain the transformation matrix
. Downstream of the previous operations, the unknown rigid transformation matrix
is obtained as (
Figure 2):
2.3. Statistical Estimation of the Geometric Transformation
From the data registration step described in
Section 2.2, we have obtained a first estimation of the unknown geometric transformation that is strongly affected by noise and data dispersion. To perform a robust estimation as the working distance changes, we have decided to acquire several data of the transformation for outputting the optimal estimation through a statistical approach.
Three different methods of statistical processing have been implemented and subsequently compared, to estimate the rigid transformation matrix from the n matrices obtained downstream of the operation of coarse and fine registration applied to n pairs of 3D point clouds.
As a first hypothesis, we tried to obtain the elements of the final transformation matrix through an average calculation on the matrices included in the dataset. However, this operation, if applied directly on the homogeneous matrices , compromises the orthonormality of the result, so we decided to apply this solution representing the in the corresponding rotation matrices and translation vectors.
Subsequently, as the mean rotation matrix
and the mean translation vector
were obtained, we put the final transformation matrix
. The mean translation vector
was calculated as a simple arithmetic mean on the elements of the vectors
. Concerning the calculation of the mean rotation matrix
, there could be multiple solutions. In fact, as reported in [
29], there are several formulations in the literature to obtain the mean rotation matrix, either based on Euclidean or Riemannian distance metrics. The same paper also shows how, where data does not present a high variability (as it can be assumed for the present case, since the
are estimates of the same transformation matrix), the arithmetic mean applied to the rotation vectors
, obtained in turn from the corresponding rotation matrices
, represents an approximate solution to both the Riemannian
and Euclidean
averages, and how the calculation of the mean rotation vector
leads to different results for values beyond the third decimal place. Based on these considerations, the mean rotation matrix was derived from the mean rotation vector
: the latter is calculated as the arithmetic mean of the rotation vectors
.
As a second hypothesis, we tried to obtain the rigid transformation matrix
as above, but including in the calculation only one subset of the
from the initial dataset. This selection was made to eliminate outliers from the calculation of mean vectors
and
, as these values lead to a polarization of the results obtained from the application of the arithmetic mean to the vectors
and
. In particular, an algorithm was implemented in Matlab
® for the automatic determination of the set of matrices
with
, to be included in the calculation of
. It operates in the following way:
for each with i ∈ [1, n], if the RMSEi (Root Mean Square Error calculated by applying the ICP algorithm in the fine registration stage) is less than RMSE*, than ∈ , with otherwise it is discarded;
for each , the translation vectors and the rotation vectors are determined;
for each component xj of the vectors and with j ∈ [1,3], it determines the interquartile range IQR(xj) (i.e., the difference between the third q0,75 and first quartile q0,25 in the ordered series of data);
if (xj − q0,75) or (q0,25 − xj) > 3 IQR(xj), then (xj) (or (xj)) is discarded, otherwise (xj) (or (xj)) ∈ (or );
calculates from and vectors as in the first algorithm.
The third proposed solution is based on an algorithm implemented in Matlab
®, which automatically determines the final transformation matrix
, by selecting it from the
matrices included in the initial dataset. It operates in the following way:
for each , it applies this transformation to the 3D acoustic point clouds, to align them with the corresponding 3D optical point clouds ;
for each pair , the mean distance between the points of the 3D optical cloud and the corresponding of the acoustic 3D point cloud is calculated;
calculates as the mean of ;
selects the as the minimum value of ;
assumes as the transformation corresponding to .
4. Experimentation
In this Section we will describe the operations carried out at the different stages of the planned series of tests, to evaluate the performance of the designed opto-acoustic camera prototype. The purpose of the tests is twofold: on the one hand, we want to evaluate which one of the three statistical processing methods ends up to be more effective; on the other hand, we want to get a validation of the alignment method. This has been obtained by estimating the mean distance μ (and the respective standard deviation σ) among the aligned optical and acoustic 3D point clouds of the target panel.
During the selection of the most efficient methodology to be adopted for the calculation of the matrix
, as discussed in
Section 2.3 by comparing the implementation hypotheses, we would assess the complexity of the adopted solution and the quality of the obtained results, considering that there is a limit to the accuracy of the registration of the acoustic and optical 3D point clouds. This limit is due to the error that occurs in the reconstruction of the 3D point cloud by the stereo optical system and the accuracy of the acoustic camera in the reconstruction of the rig. In fact, any result below this threshold would be completely random and linked to the specific dataset used to determine the matrix
.
4.1. Image Acquisition
Prior to the actual acquisition stage, we carried out some operations to configure the optical and acoustic sensors of the system. In particular, concerning the stereo optical subsystem, we adjusted the focus settings for the cameras in air and performed some acquisition tests underwater, to verify the correct superposition of the FOVs, as provided for in the design of the support frame.
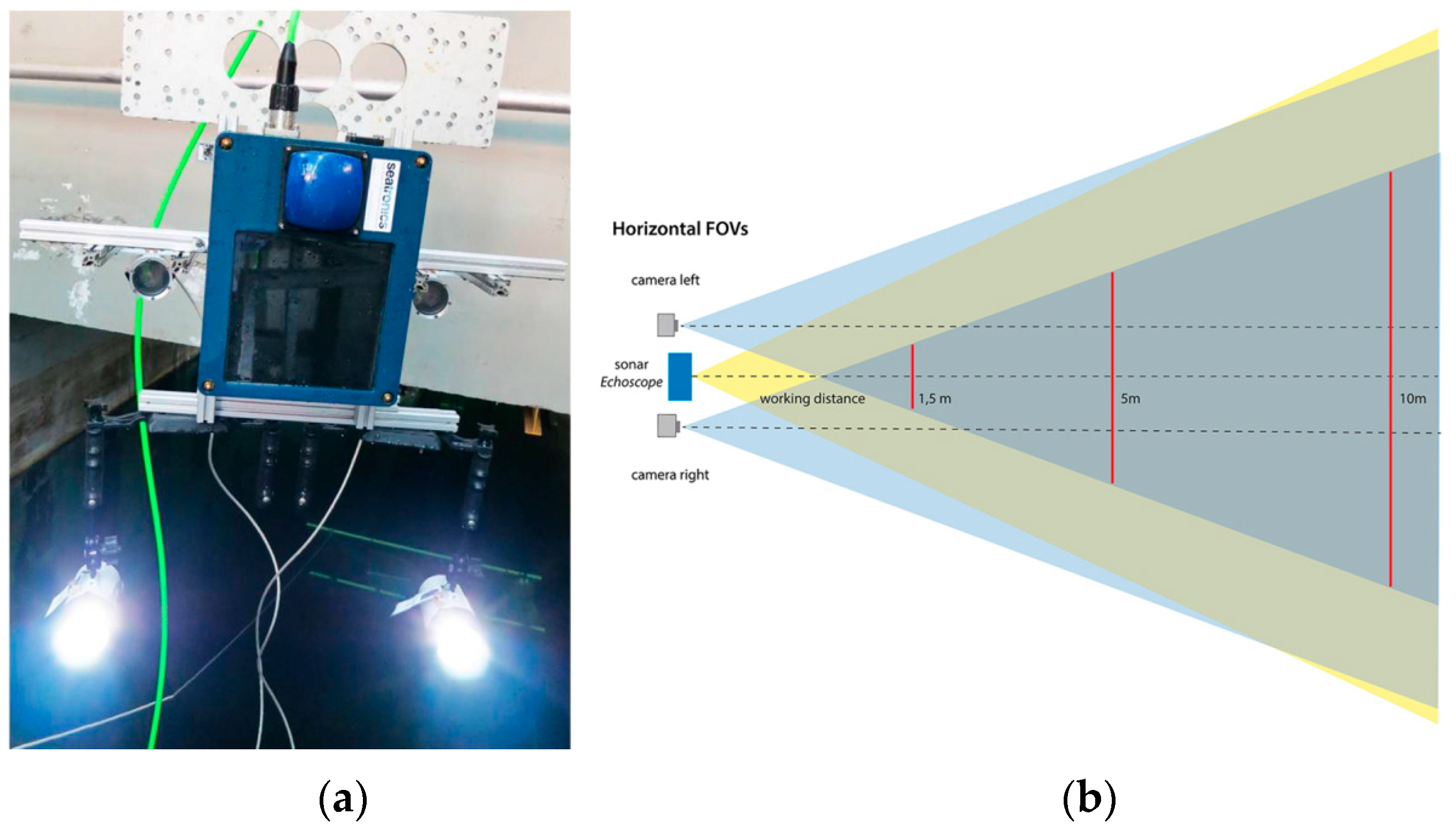
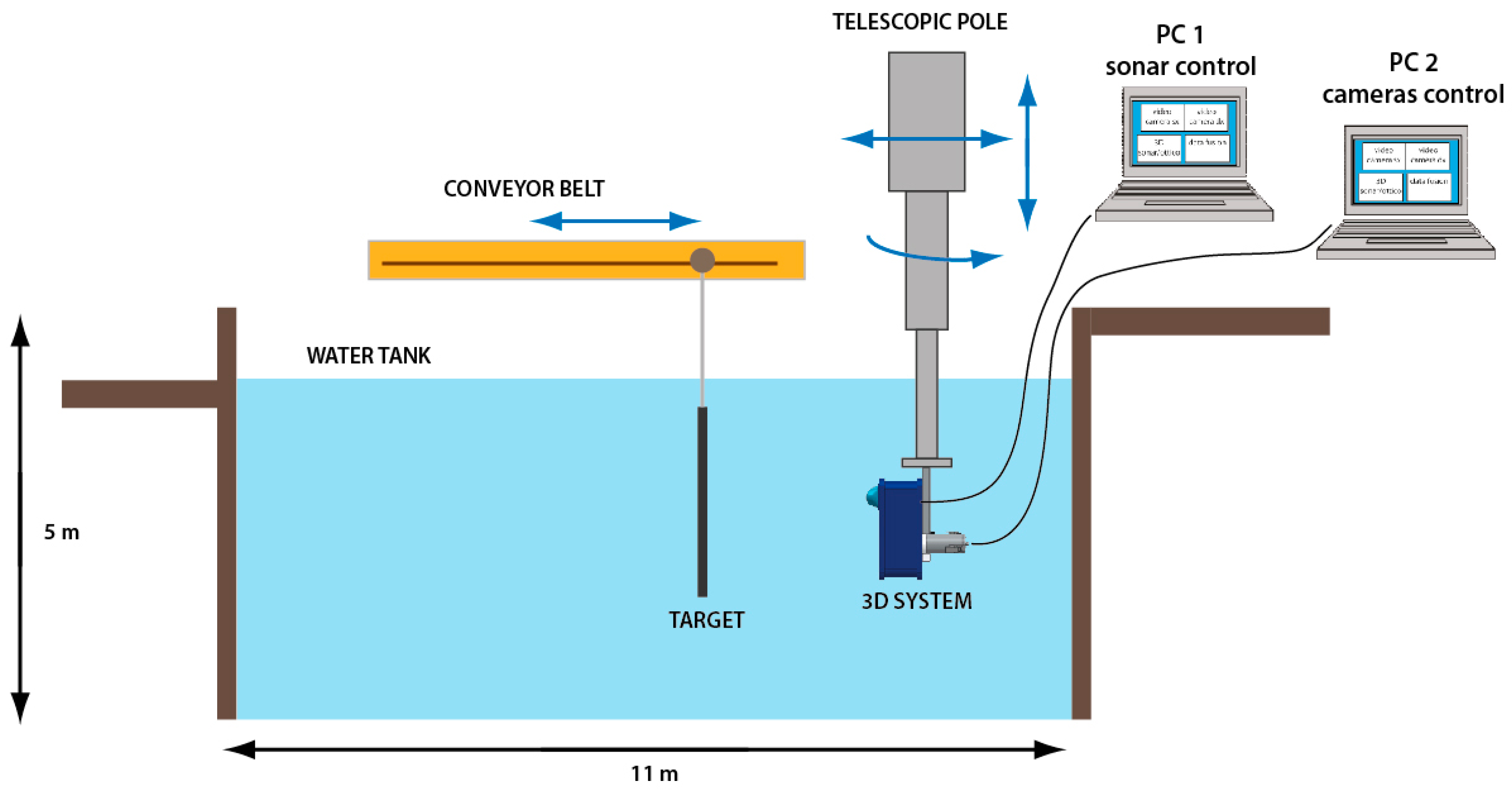
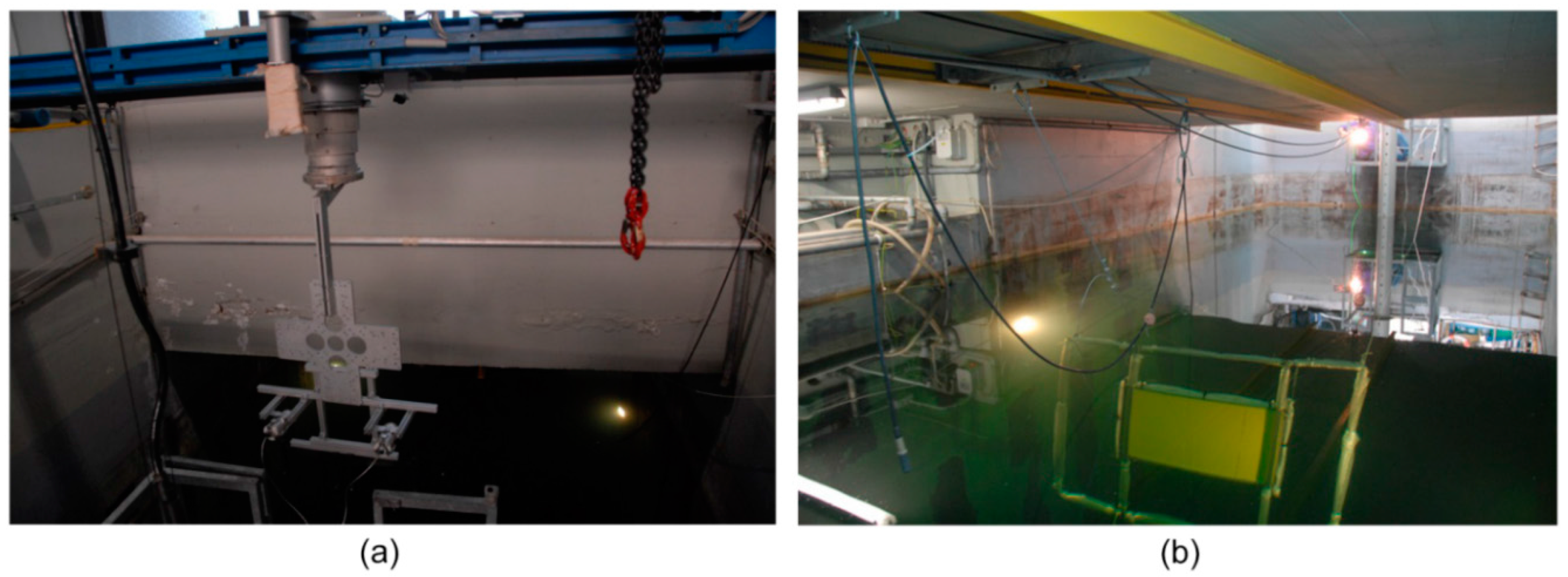
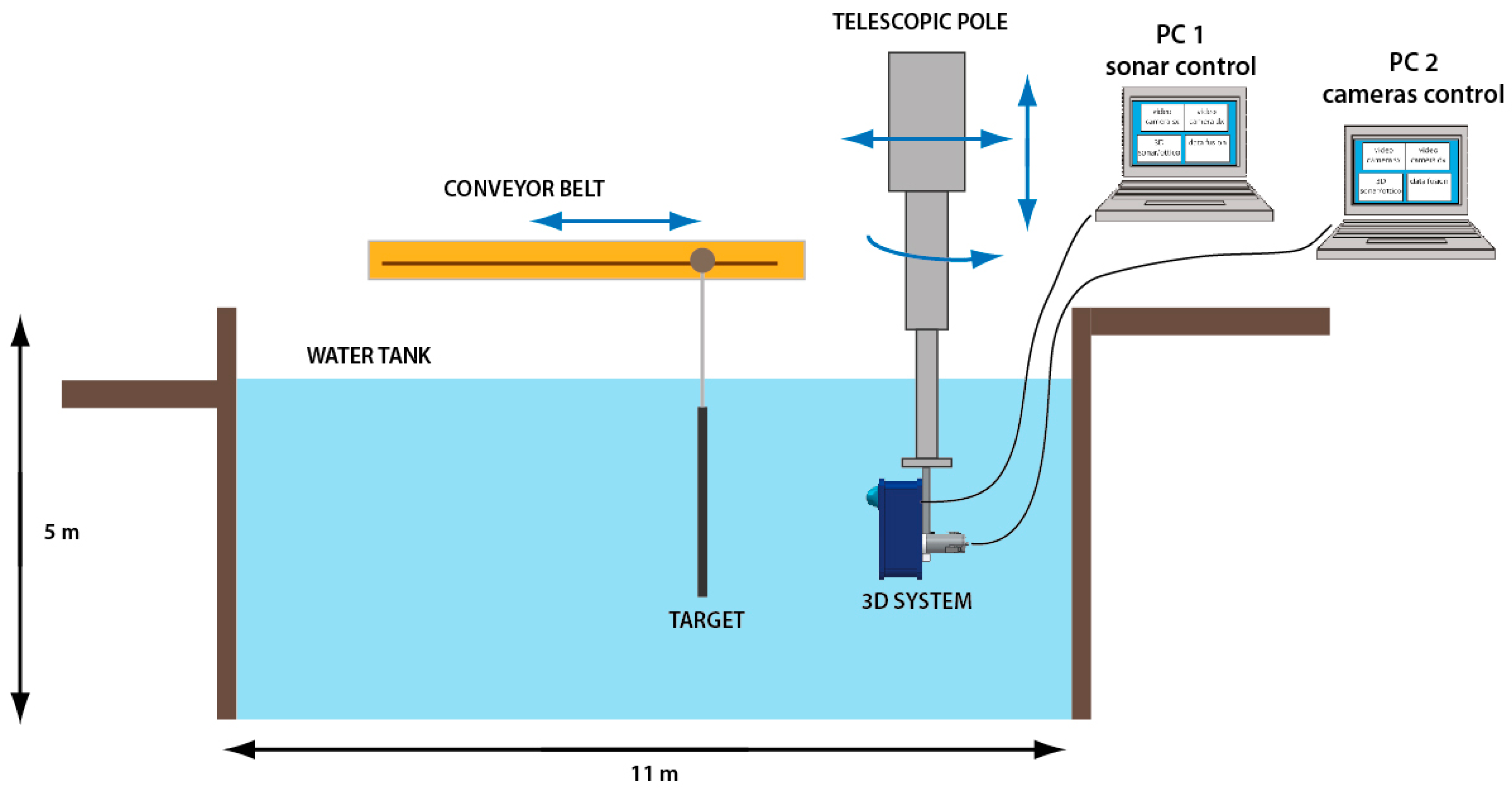
The Echoscope sonar has been adjusted to excite the transmission section with the highest working frequency, corresponding to 610 KHz. In this stage we found that the optical axes had to be kept slightly convergent rather than parallel, to correct the overlap of the FOVs of the two cameras in the range of operation. As for the alignment methodology, we acquired a sequence of 20 different poses of the orientation fixture, by positioning it at a distance varying from about 1.5 m to 10 m and in different orientations. The panel was rolled, tilted and twisted to reduce the correlation of the calibration parameters of the optical stereo camera, while the opto-acoustic camera was clamped to a telescopic pole varying its transverse position and orientation (
Figure 7).
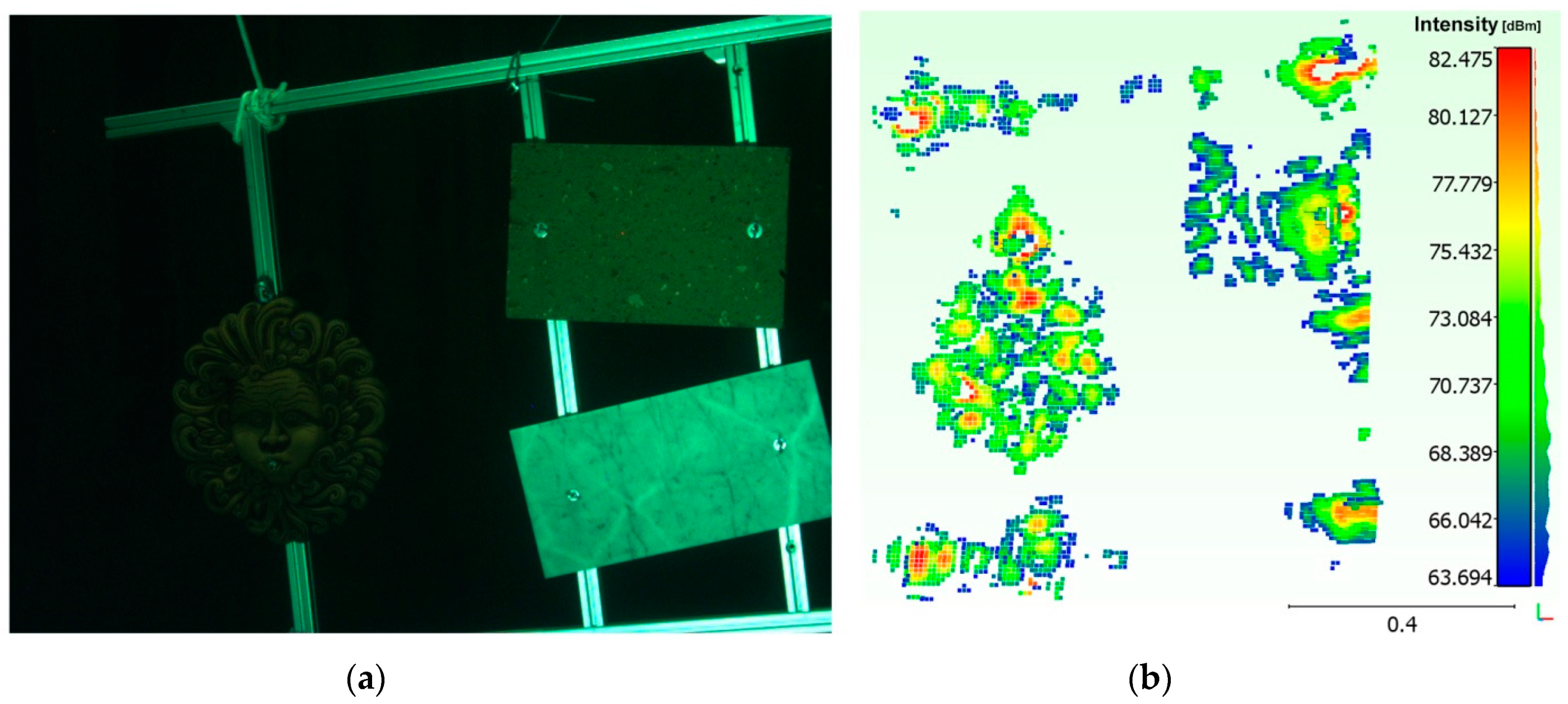
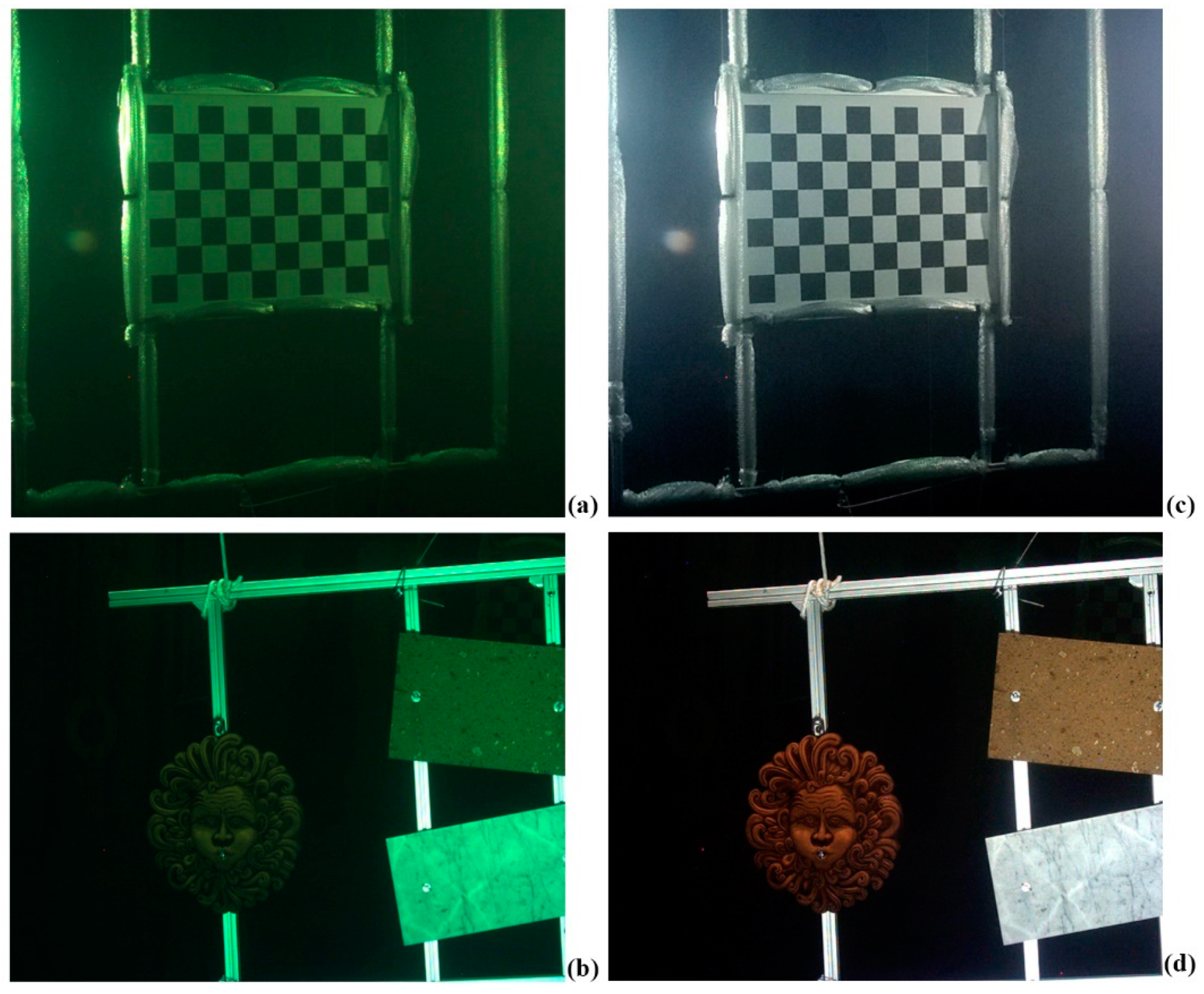
Three different poses of the panel containing objects of various shapes and materials were acquired (
Figure 8). The panel was positioned on the side edge of the water tank (at a distance of approx. 2.5 m from the opto-acoustic camera) and the camera was handled by means of the telescopic pole.
The output of the acoustic camera, which—in addition to the image of the acquired 3D point cloud—shows the scalar field representing the intensity of the echoes received for each acquired point, has immediately shown the strong limits of Echoscope in close range applications. In fact, contrary to what is stated by the manufacturer, the sonar was not able to process correctly the scattering signal returned by the objects placed at distances less than 2.5 m. This could be due to two causes: either an excessive duration of the transmitted pulse (a pulse with a duration of 2 ms generates a blind range equal to 2 m) or, more likely, the type of beamforming applied, which does not allow for an appropriate phase correction for focusing at close range.
4.2. Data Processing
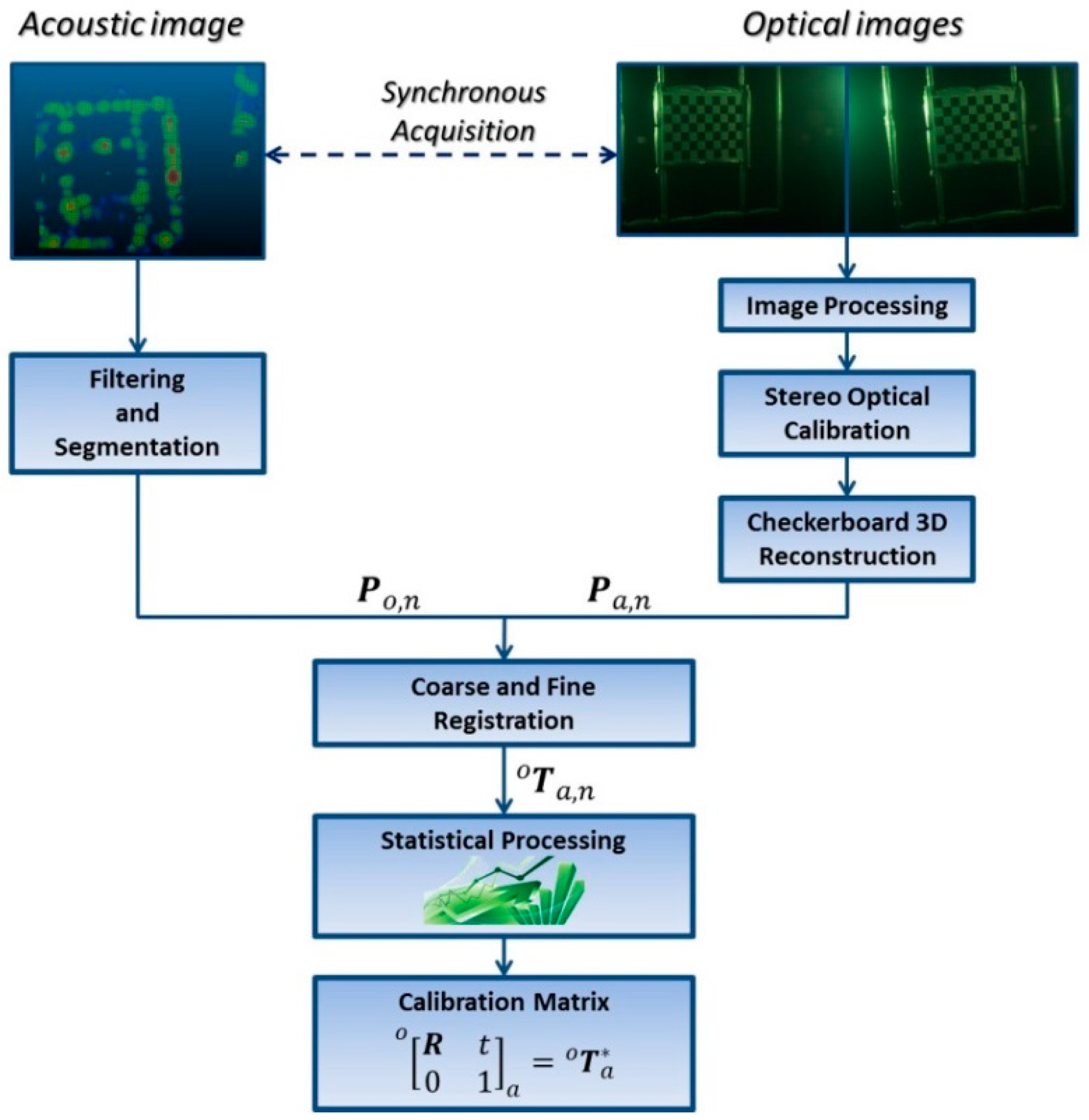
The processing pipeline of the data acquired through the optical and acoustic sensors is shown in
Figure 9. Starting from the synchronous acquisition of the
n poses of the orientation rig during the early stage of the process, the system outputs
n pairs of 3D point clouds, where the
n-th pair is formed by the optical
and the acoustic
3D point clouds, to calculate, by means of coarse and fine registration technique,
n estimates
of the rigid transformation matrix.
At the end of the process, as described in
Section 2.3, the final transformation matrix
is obtained by statistically processing the dataset composed of
n transformation matrices
obtained downstream of the previous registration stage.
4.2.1. Acoustic Image Processing
The 3D data provided by the acoustic camera can be corrupted either by false reflections caused by the secondary lobes of the receiving array or by the noise present in the acquisition phase of the backscattering signals. Although the Echoscope directly performs a low-level preprocessing, it is still necessary to conduct some appropriate operations on the acoustic 3D point cloud, to clean up the images from noise or potential outliers. So it is evident that the operations of filtering (noise reduction and the elimination of possible outliers) and segmentation (differentiation of objects and background in the observed scene) are to be considered as preliminary and mandatory steps for the execution of all integration algorithms to be applied to this specific type of data [
36,
37].
The solution adopted in this first implementation of the alignment method is based on a thresholding method, performed through the open source software CloudCompare [
38].
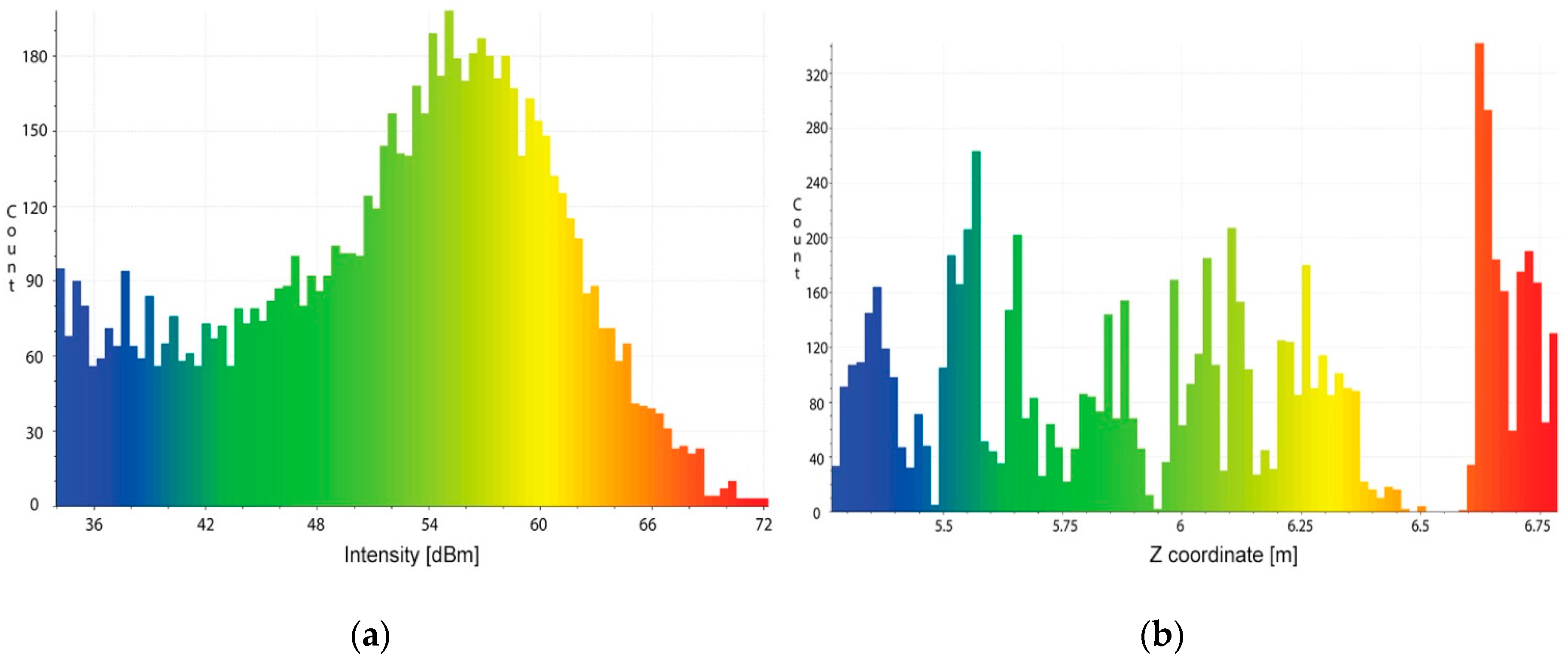
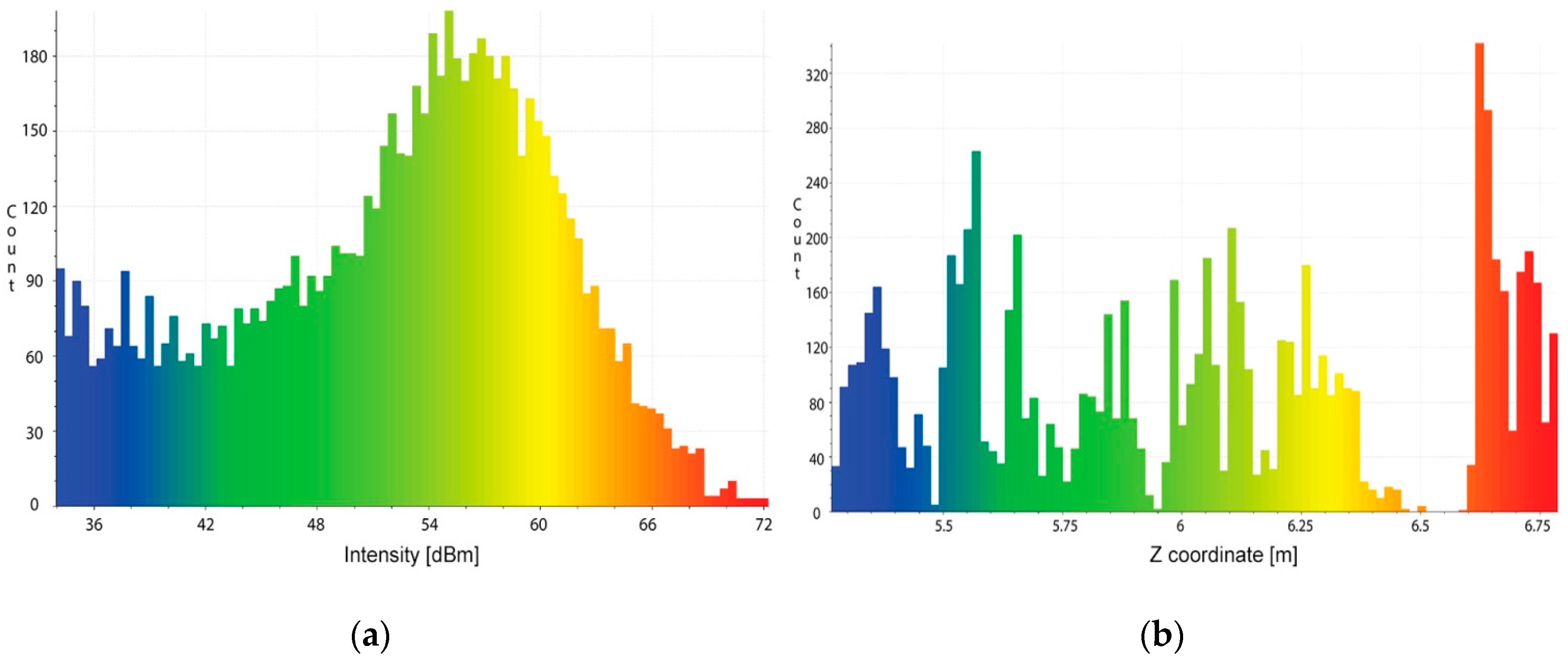
Given the range and intensity information provided by the acoustic camera, we used two threshold tests to discriminate between actual backscattered echoes and clutters. The method operates in the following way:
Test 1: assuming a Gaussian distribution for echo amplitude noise, 3D points with intensity lower than a threshold thr1 are discarded, while the others are considered as belonging to the target;
Test 2: given the histogram of the range values and knowing the geometry of the rig, 3D points outside an interval defined by the thresholds thr2 and thr3 are discarded, while the others are considered as belonging to the target.
Threshold values are manually defined, through a vision inspection of the echo and range distribution, respectively (
Figure 10), as the implementation of an automated procedure would require further, more focused research. However, different automatic thresholding and filtering methods are described in the literature. A comprehensive review is reported in [
36].
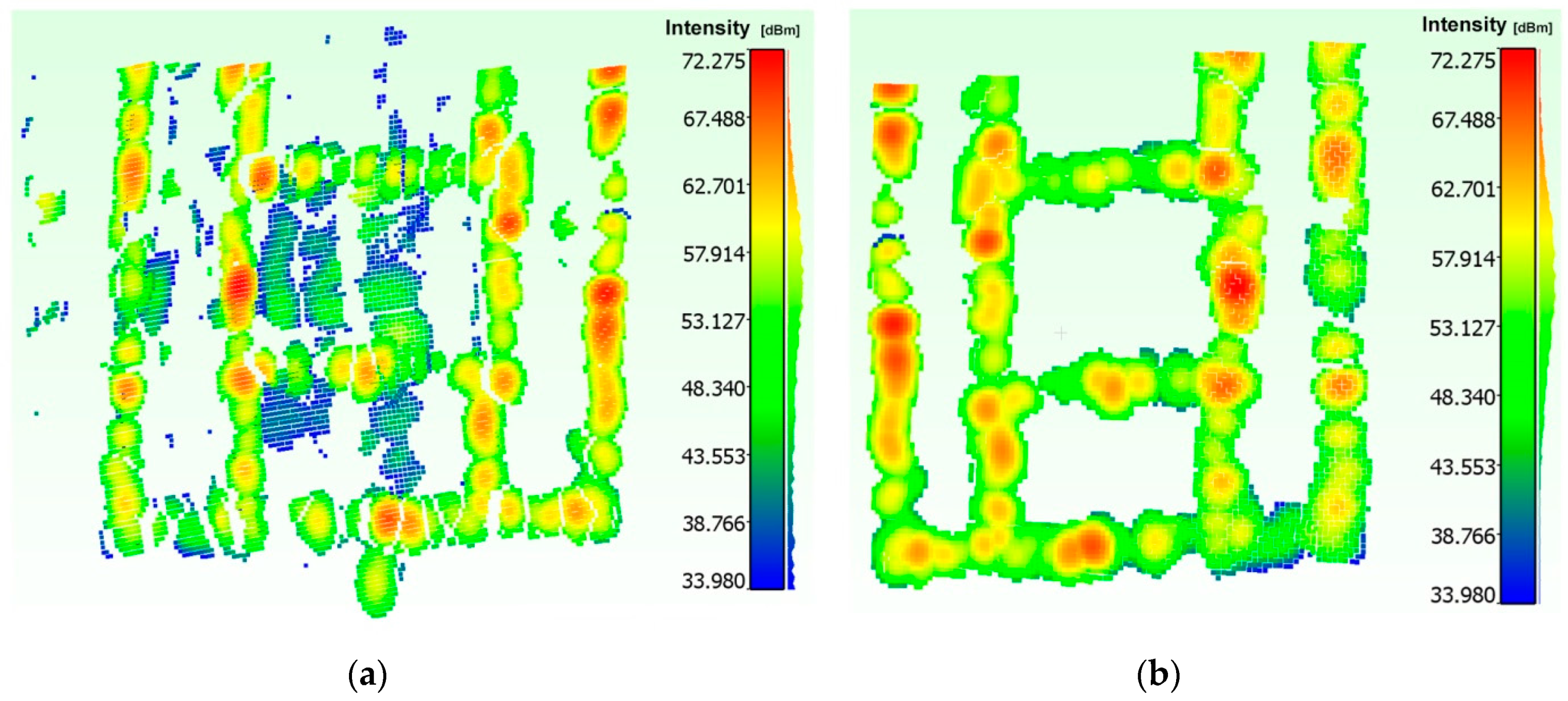
Applying the above thresholding method, we have obtained the results shown in
Figure 11.
4.2.2. Stereo Optical Image Processing
To obtain the 3D point clouds of the orientation rig for each pose assumed during the acquisition stage, the stereo optical images are processed through the algorithms reported in
Section 3.1.2.
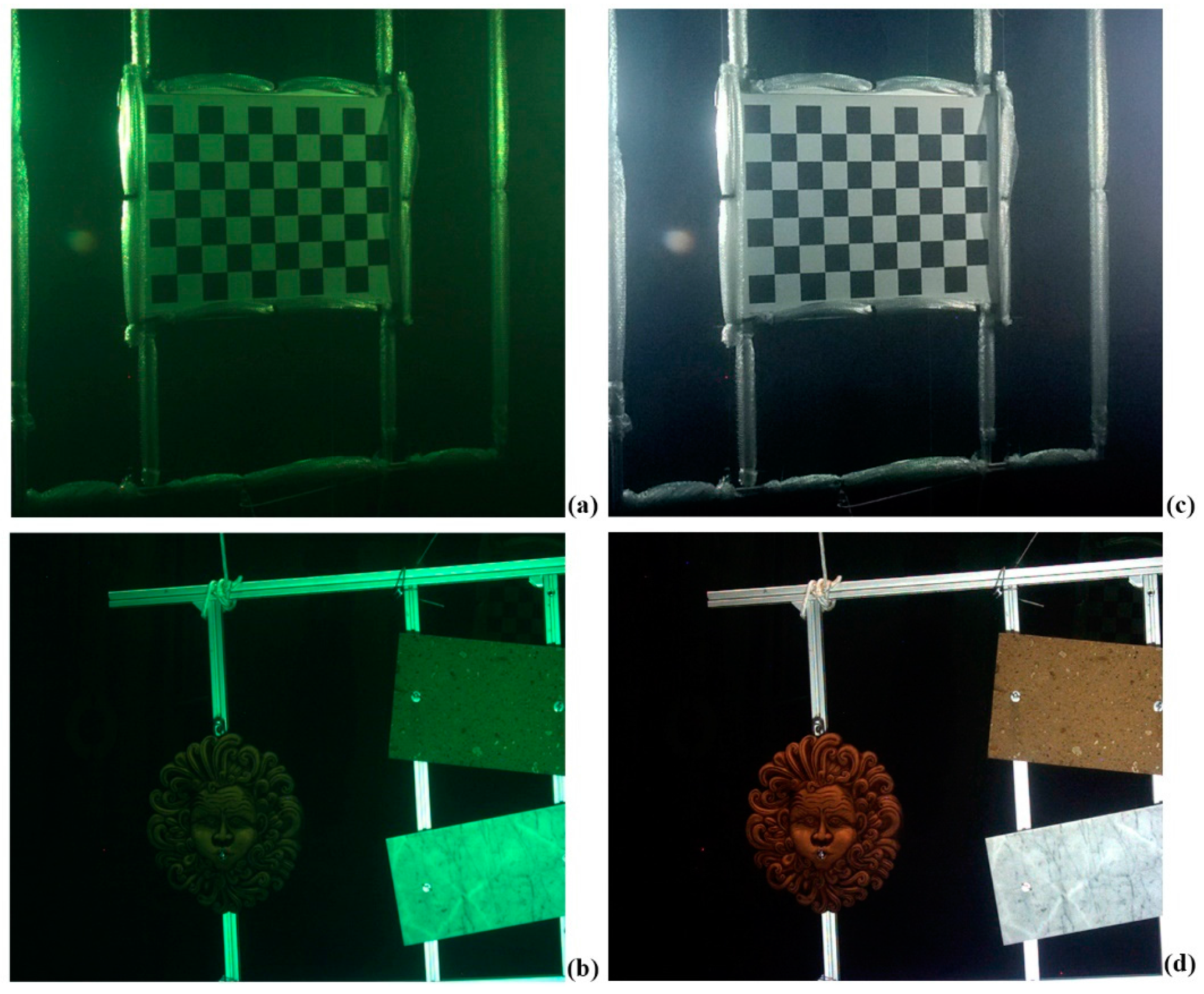
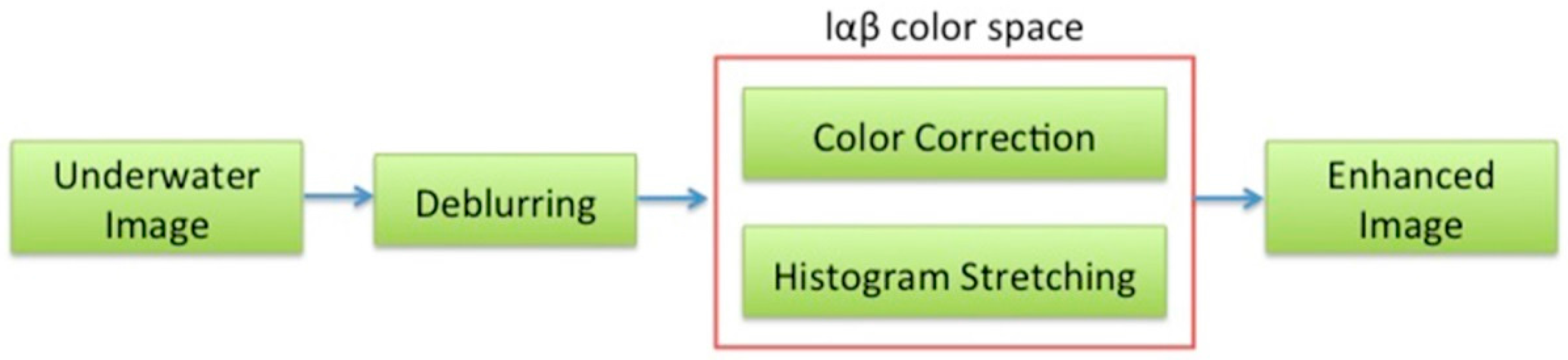
Before 3D reconstruction, the underwater images have been pre-processed to reduce blur due to scattering effects and correct color casts (remove greenish-blue components). This can be done through two different approaches: digital restoration techniques or methods of image enhancement [
39,
40]. In the proposed alignment method, the adopted solution provides for an image enhancement methodology based on the technique presented in [
41].
As a first step, sharp filtering has been performed to remove the fog in the images, due to the scattering effects, which decreased image contrast and increased the blur. Secondly, the images are color corrected through a white balancing in the lαβ color space. It allows for removing the color casts in underwater images that typically suffer from color alterations, by balancing the chromatic components (α and β), while the luminance component (l) is used to improve image contrast by cut-off and histogram stretching (
Figure 12). The method is particularly suitable to process our datasets, as it has been proposed for applications like close-range acquisition in nadir direction.
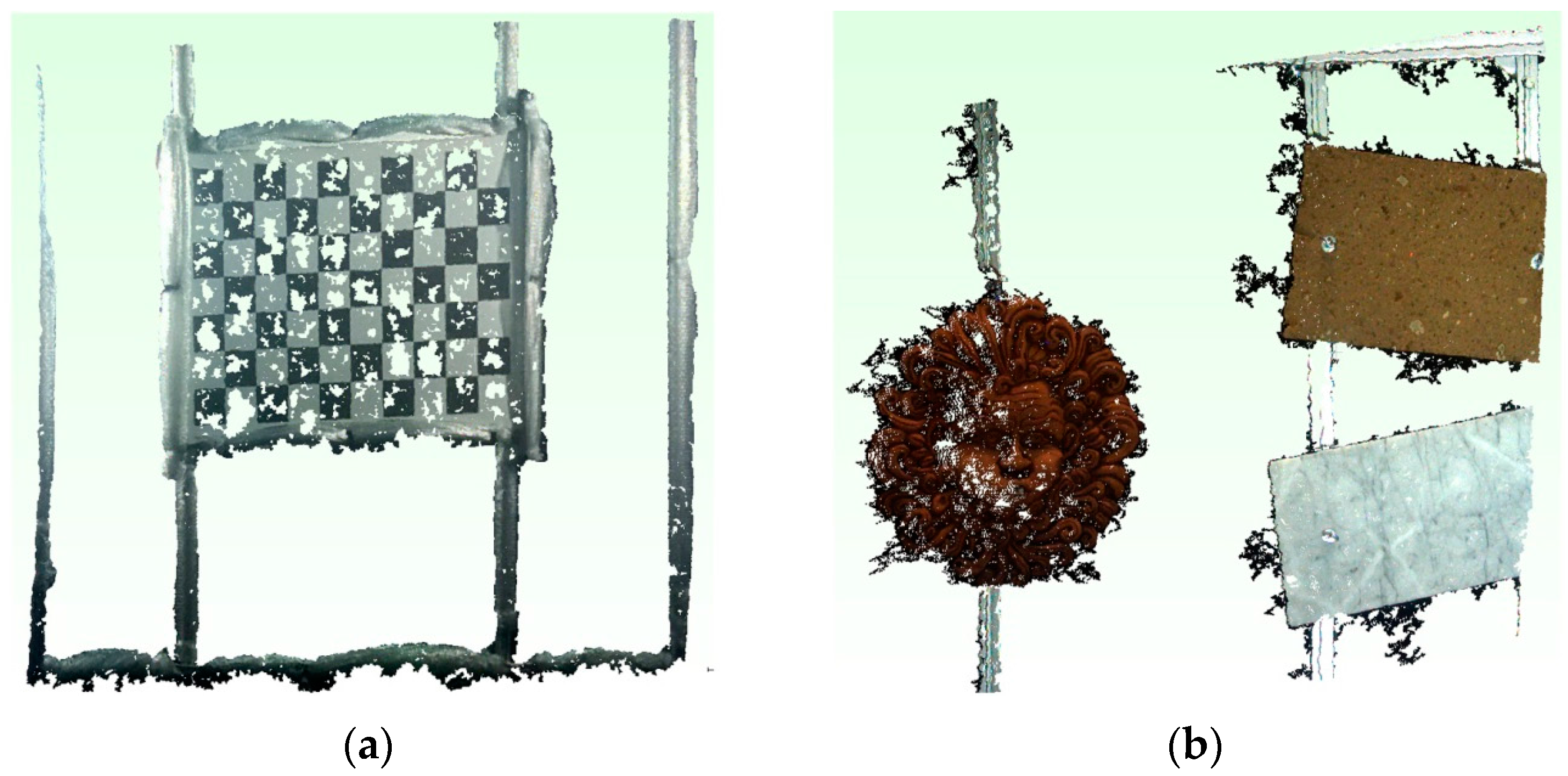
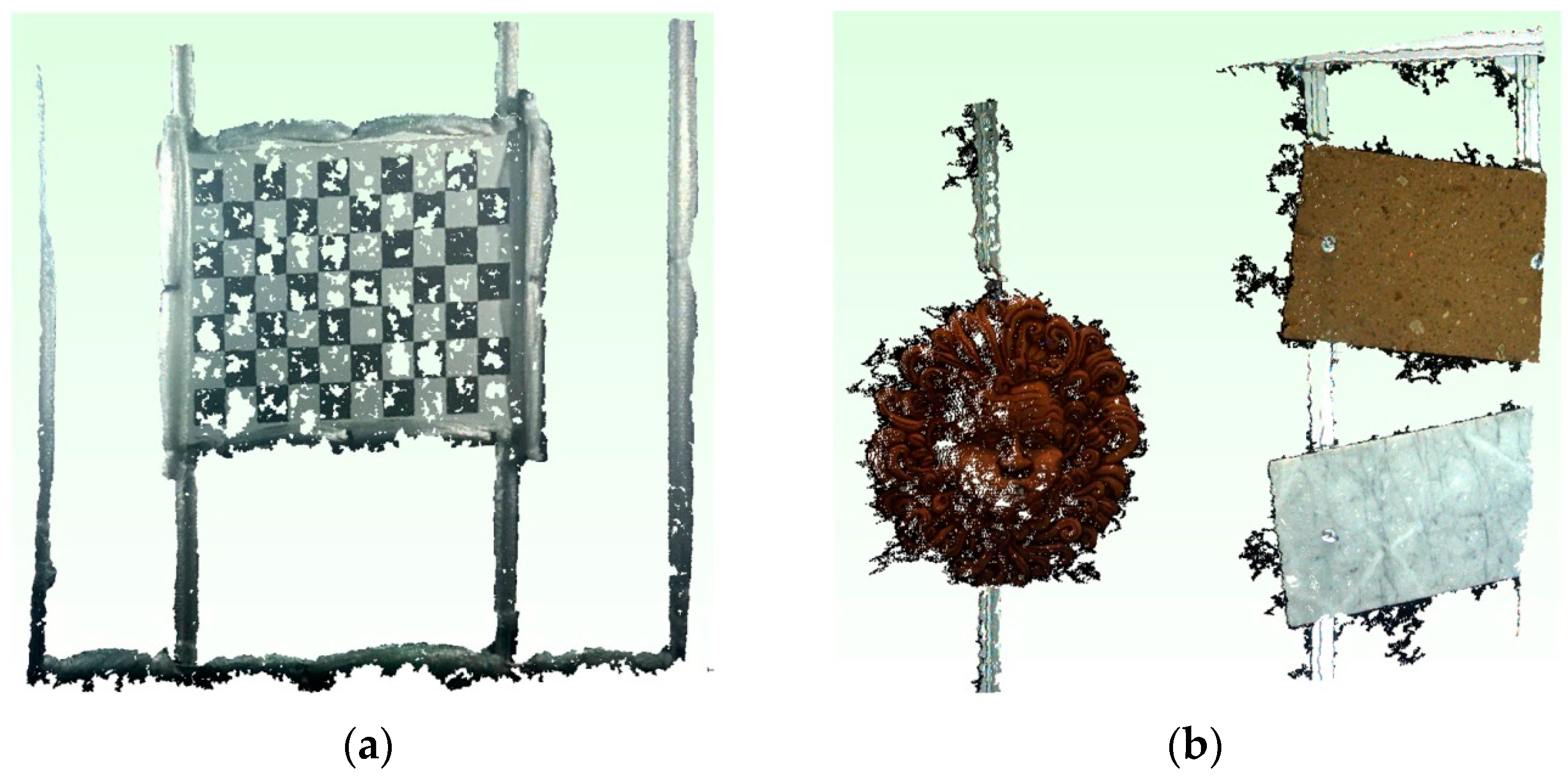
Subsequently, the acquired optical images have been processed to generate the 3D point clouds of the orientation rig and the panel with objects in various poses. The application of the algorithms has allowed for the reconstruction of 11 over 20 poses of the orientation frame, since in 9 poses the stereo matching algorithm was not able to reconstruct the target. A stage of manual cleaning of the raw 3D point clouds performed with CloudCompare, downstream of the reconstruction process, was necessary to eliminate several outlier points. Automatic methods can be used for this stage. For example, the algorithms present in the Point Cloud Library (PCL) [
42].
Figure 14 shows two examples of optical 3D point clouds of the orientation frame and the target, respectively.
4.2.3. Optical and Acoustic Registration
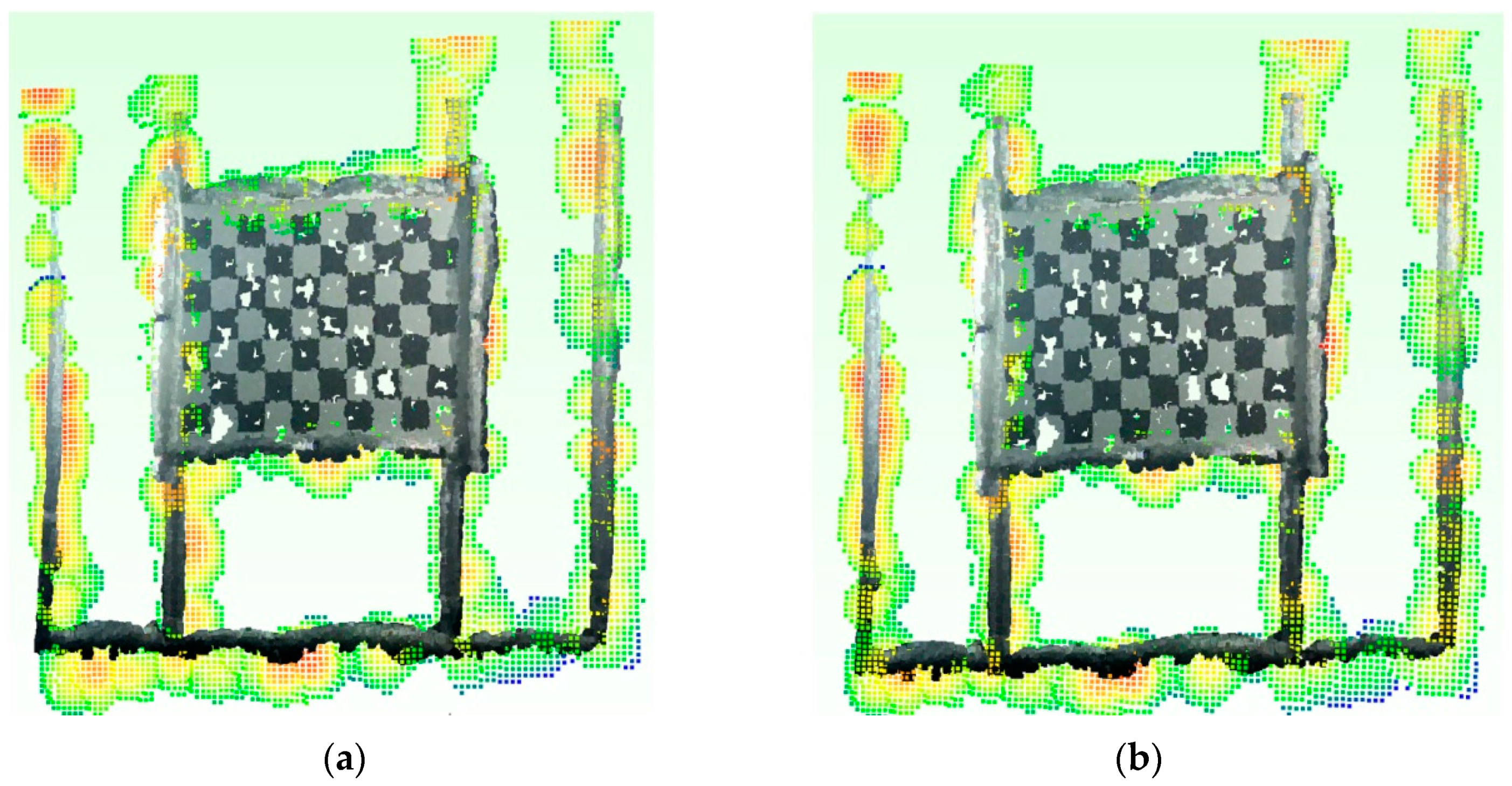
As described in
Section 2.2, the relative orientation between the optical and acoustic system is obtained downstream of a statistical processing of
estimates coming from the registration of the
n pairs
of optical and acoustic 3D point clouds. This registration stage was performed for each of the pairs
with
n ∈ [1,11] derived from the previous step of the implemented alignment method.
Figure 15 shows the results of the algorithms on one of the 11 acquired pairs.
4.2.4. Statistical Processing of the Transformation Matrices
The different methods of statistical processing described in
Section 2.3 were applied on the dataset composed of
with
n ∈ [1,11] estimates of the unknown rigid transformation matrix, obtaining three approximations of the
matrix,
i.e.,
,
,
respectively.
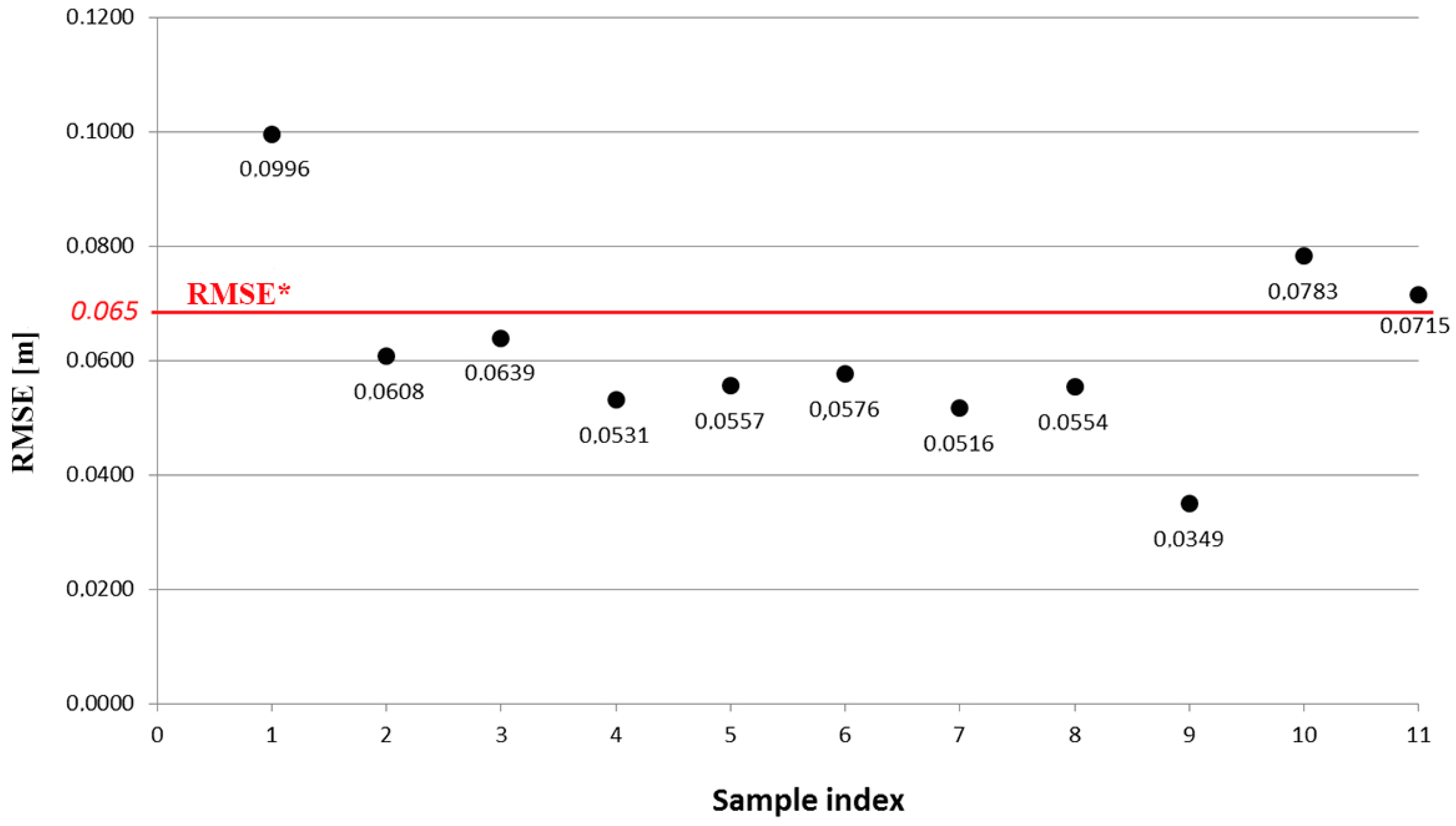
Concerning the second methodology, the choice of the RMSE* value was carried out by analyzing the graph in
Figure 16, that shows the RMSE values associated with each of the
pairs of registered 3D point clouds. These were ranked in ascending order along the
x-axis, as a function of the acquisition distance by the opto-acoustic imaging system. As can be seen from the graph, the pairs
with
n = 1, 10, 11 present a higher RMSE value than the remaining ones, so the RMSE* was set to 65 mm, to eliminate the related matrices
from the average calculation.
By applying this solution, five of the 11 estimates
of the rigid transformation matrix have been discarded. It is interesting to note the existing relation among the RMSE values of the ICP algorithm and the different poses of the rig. The sample with index
i = 1 in the graph (
Figure 16) is associated with the only pair of 3D point clouds
that we were able to obtain from the first nine poses of the orientation frame over a total of 20 poses. These have been acquired at a distance of between 1.5 m and 4.5 m from the opto-acoustic camera. The samples with index
i ∈ [2,9] refer instead to the eight poses acquired at a distance of between 4.5 m and 7 m. Finally, the samples with index
i = 10, 11 refer to the pairs of 3D point clouds
and
, obtained from two of the three final poses acquired at a distance of between 7 m and 10 m. The pairs with high RMSE values are associated with the poses acquired at a distance of less than 4.5 m and more than 7 m. Thus, we can deduce that the optimal condition for the opto-acoustic camera, with respect to the specific target, is within distances of between about 4.5 m and 7 m. As one can expect, at a distance of less than 4.5 m, the acoustic component of the system presents the main limitations in reconstructing the acquired target, while for distances greater than 7 m, the stereo optical camera suffers from poor performance, as the stereo algorithm fails to process the acquired images.
5. Results
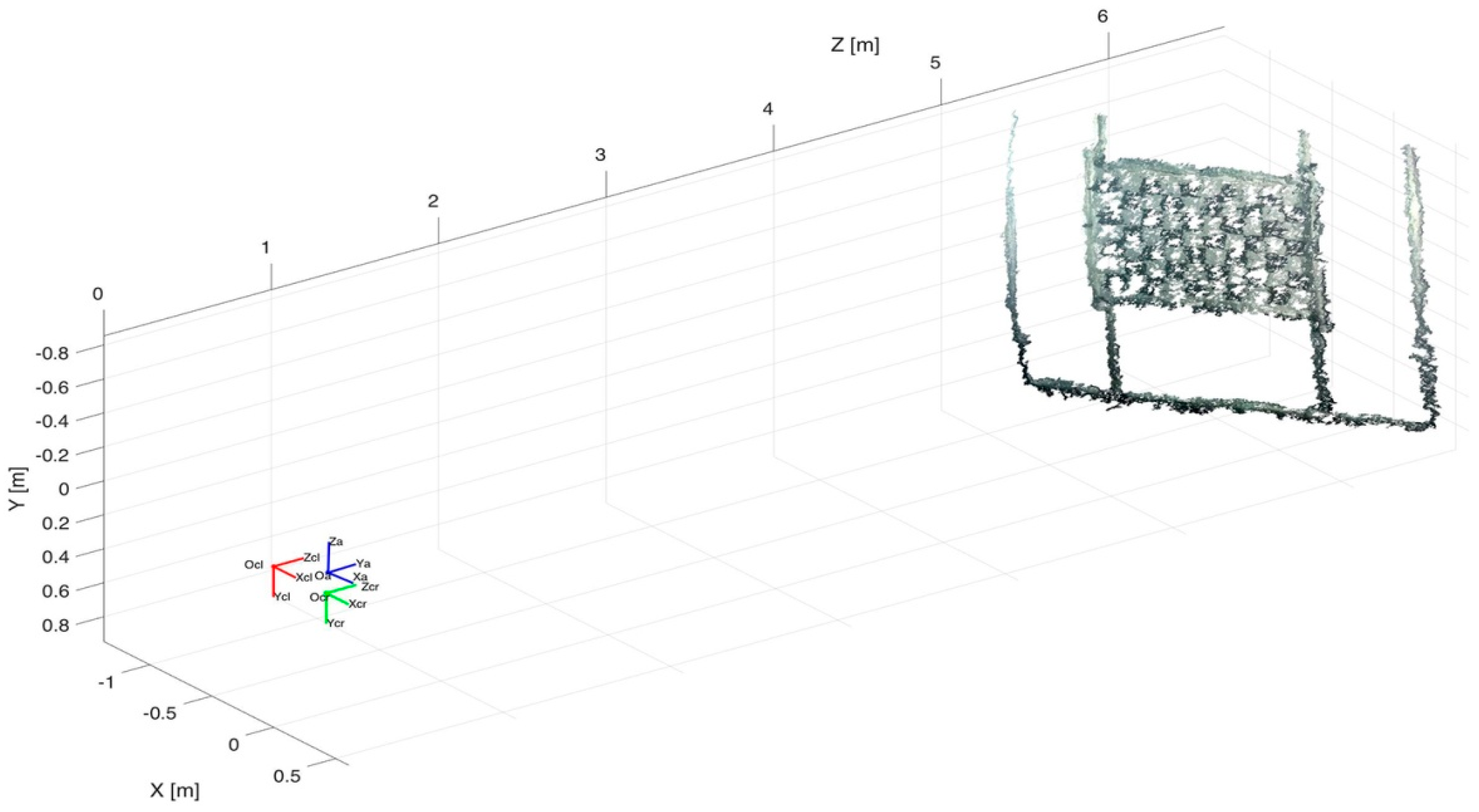
From the three statistical processes we have estimated the rigid transformation matrix that is needed to perform the relative orientation of the opto-acoustic system.
Figure 17 shows the relative positions of the coordinate systems related to each device, for one pose of the orientation frame.
Table 1 shows the Euler angles computed by the rotation matrix and the norm of the translation vector for each of the three methods. We should notice that there is a relevant difference among the values calculated by the three methods and, in particular, for the magnitude of the translation.
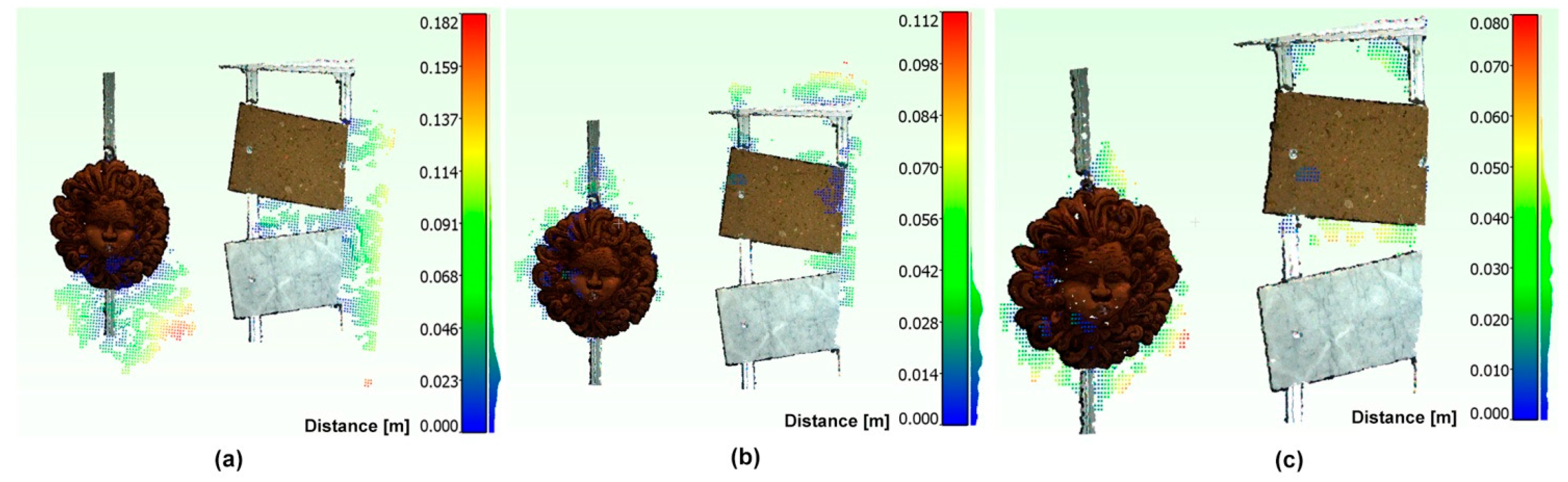
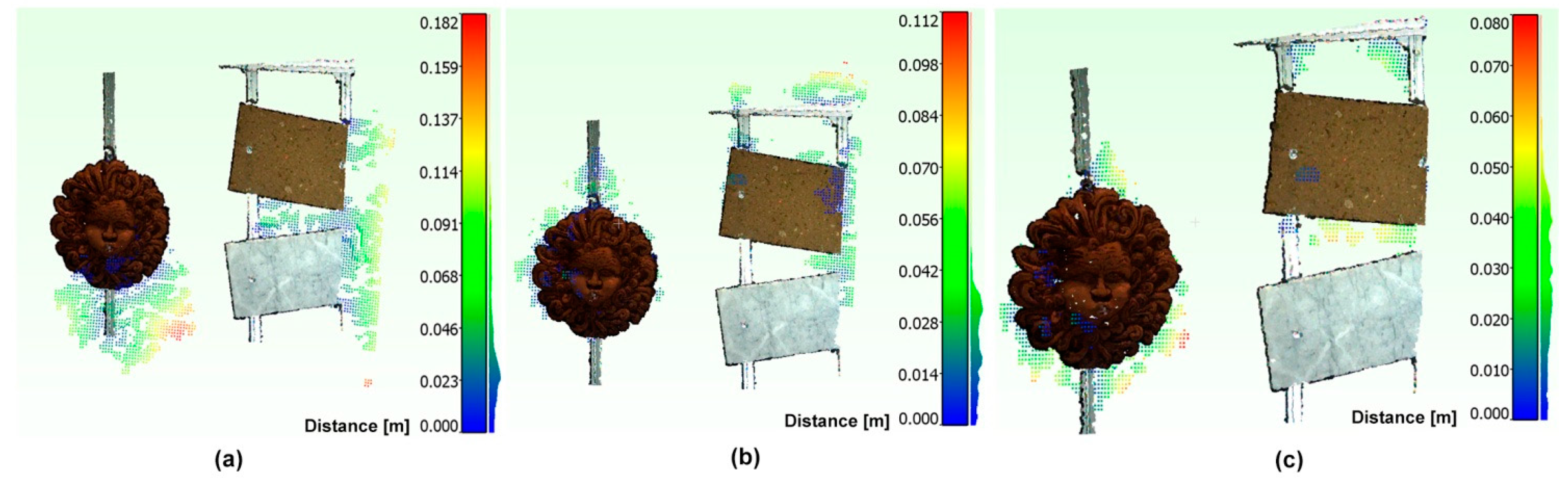
We have analyzed the obtained results, in terms of mean registration error, by applying the three transformation matrices on the pair of optical and acoustic 3D point clouds belonging to the panel with objects (
Figure 18).
Table 2 reports the mean registration error μ and the standard deviation σ.
The data confirm that the third statistical method provides the best results. As can be noted in
Figure 18c, the values with the greater distance are due to the noise of the acoustic 3D point cloud, especially in proximity of the terracotta mask and the aluminum frame of the panel itself.
To define the accuracy of each system, we consider as ground truth the known-size of the orientation frame. In particular, for the optical system we obtained a value of 6.45 mm as RMSE computed by measuring the diagonals of the checkerboard (of which the dimensions were known) for all poses on the optical point clouds. This is equivalent to a length accuracy of 0.4%. The same procedure was followed for the acoustic system, knowing the external dimensions of the aluminum frame (2 × 2.5 m), and measuring them on the 3D acoustic point clouds for each pose. In the latter case we obtain a RMSE of 15 mm, equivalent to a length accuracy of 0.75%. The obtained results are consistent with the expected ones.
To finalize the validation, we have computed the accuracy of the integrated system by measuring several known lengths on the opto-acoustic 3D point clouds. In this case we have obtained a RMSE of 17.8 mm.
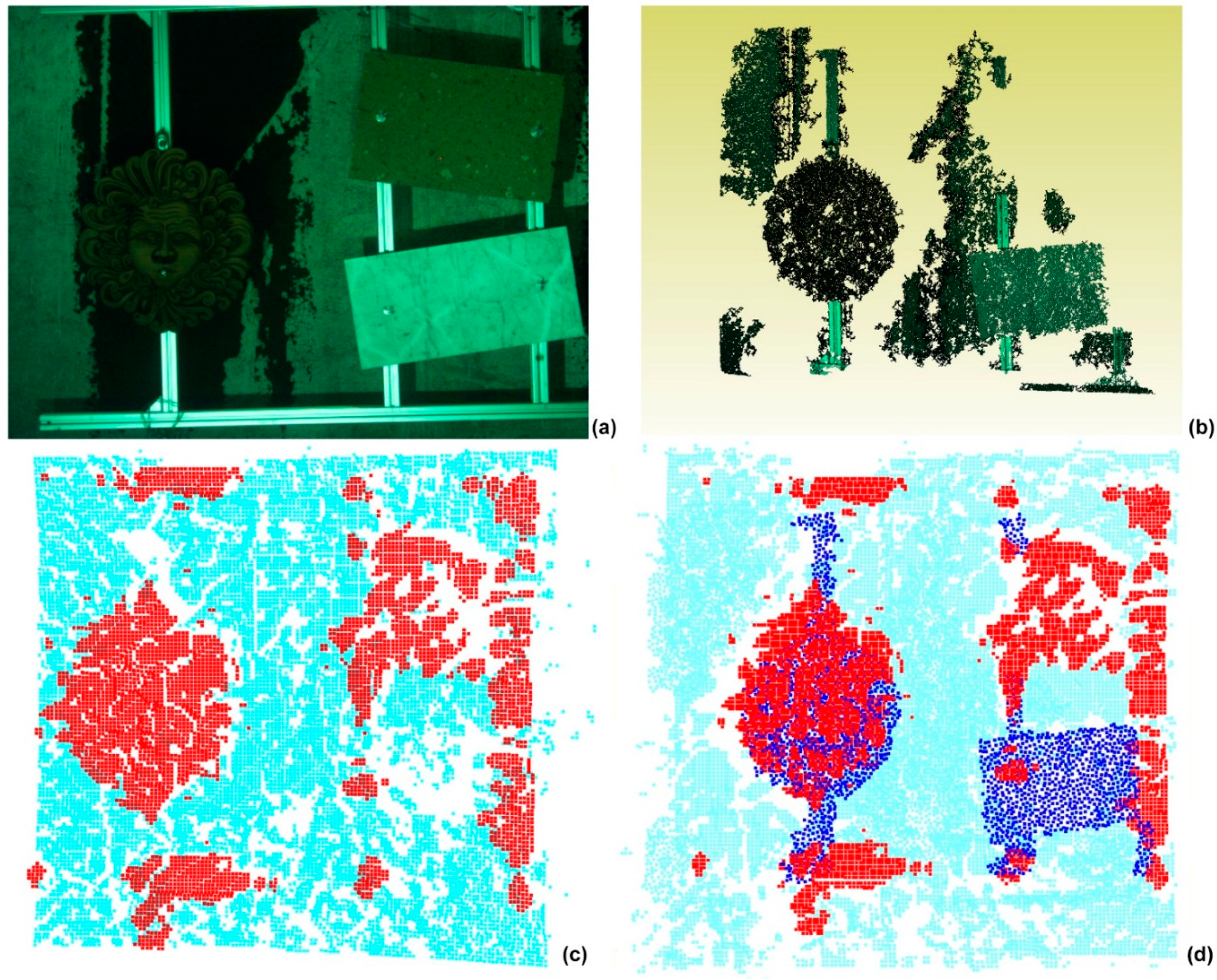
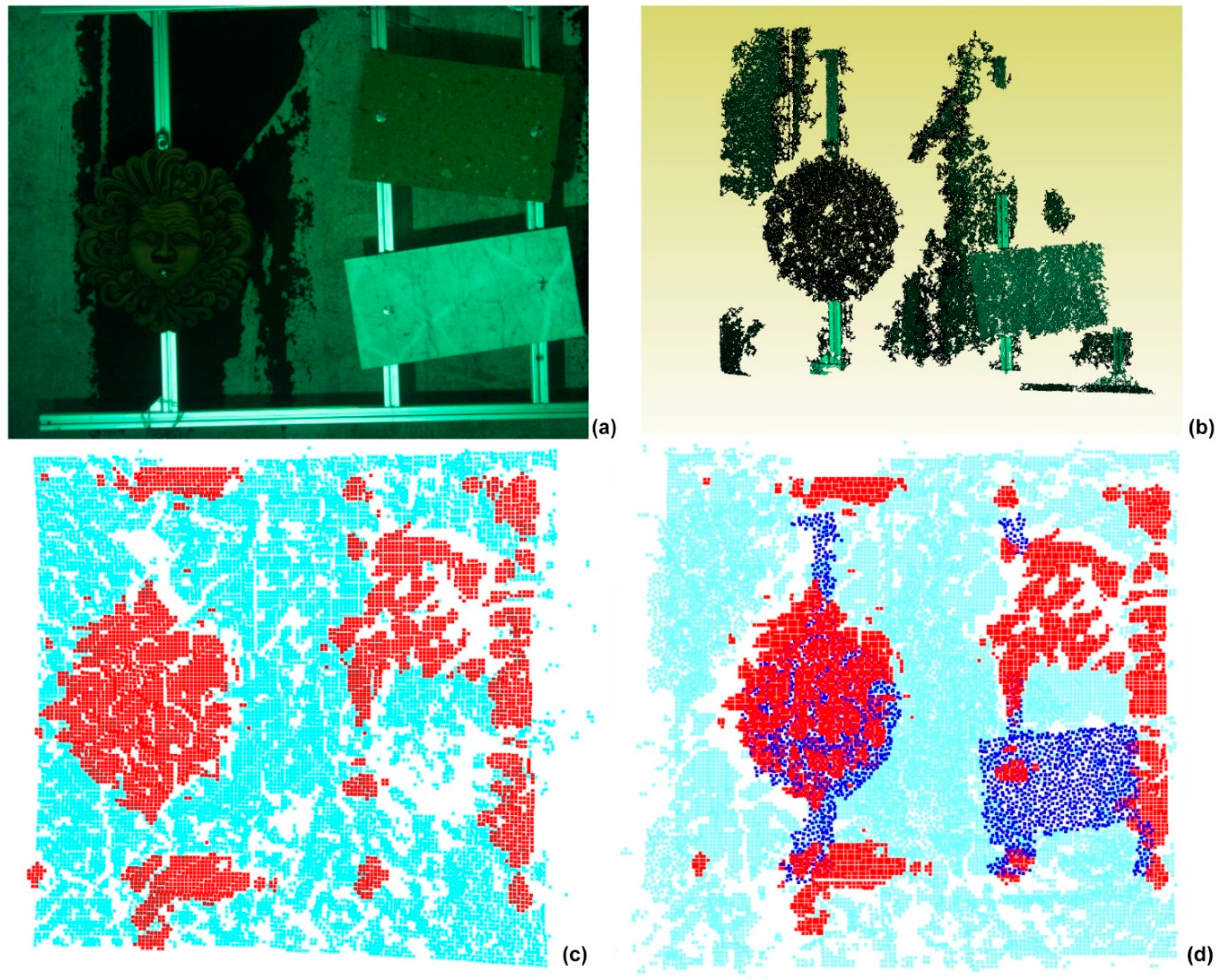
The effectiveness and the potentiality of the system can be further evaluated by analyzing the image in
Figure 19. This was obtained by integrating off-line the low resolution acoustic 3D point cloud with the high resolution optical cloud of the acquired scene (
Figure 19a). Due to the different materials, the marble tile was present only in the optical acquisition (
Figure 19b) while the tufa tile was featured only in the acoustical one (
Figure 19c). The integration of the acoustic point cloud (red points) with the optical point cloud (blue points) allows for compensating the errors in the full field-acquisition of the acoustic camera and better discriminate the objects from the background (sky blue points).
6. Summary, Discussion and Outlook
This paper presents a first step towards the realization of an opto-acoustic system for the 3D imaging of the underwater scenes. The system is composed of a stereo optical camera and a 3D acoustic camera and is designed to be installed on a ROV, to improve its control capabilities by the operator during the navigation in turbid water conditions or in close range manipulation operations. The presented opto-acoustic camera is the first underwater systems employing two 3D imaging sensors to obtain a 3D representation of the underwater scene.
In the current work, a multi-sensor registration method has been proposed for the automatic integration of 3D data acquired from the two systems, specifically for this application. We have solved the challenging problem to determine automatically a correspondence between the two different data types, by means of an orientation frame that is able to highlight some geometric features detected from both sensors. Due to the low resolution and the high dispersion of acoustic data, a statistical processing has been performed on several estimations of the geometric transformation that allows for aligning the two datasets. The statistical approach increases the robustness of the estimation by reducing the effect of the noise component. Moreover, we have described in detail the processing stages needed to prepare the data to be integrated. The results demonstrate that the presented methodology is able to return a 3D image made of integrated data. This calls for further investigations in real conditions.
The comparison of technical details and performance capability with other systems based on this technique is not an easy task. To the best of the authors’ knowledge, few works in the literature present an evaluation of the registration accuracy of the 3D opto-acoustic data. In [
20], an average error of 24.2 mm is obtained when computing the distance of all the reprojected multibeam points to their respective calibration planes while, in [
12], the authors report an average registration error between the 3D acoustic data and the CAD model of a pipe of approximately 70 mm. Finally, in [
14] the estimated 3D points are within 3.5% of their distances to the optical cameras, utilizing the reconstruction of a plane as ground truth. A maximum error of 63 mm is obtained. These results show how the integration accuracy of our alignment method, as reported in
Section 5, has the same magnitude.
The main challenges for the future developments of such a system will be: (a) the search for a 3D acoustic camera that can provide a better performance in the close range to obtain better data on the operating volume of the ROV; (b) the implementation of on-line data integration and visualization techniques, to make the ROV operator able to interpret in the best way the data generated by the integration of optical and acoustic sensors; (c) conducting experimental tests in real conditions.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}