1. Introduction
In the world, 285 million people are estimated to be visually impaired: 39 million are blind and 246 have low vision [
1]. Nevertheless the most common and largely used device is still the white cane because it is easy to use, cheap, and widely accepted among blind community, many technologies have been proposed, both in literature and on the market, to improve the autonomous mobility of people affected by visual diseases. They are mainly based on ultrasonic or optic sensors [
2,
3]. Anyway, whatever physical quantity they are based on, they present many limitations and no one of them meets either the international guidelines defined for ETAs [
4], or the requests of visually impaired users. For this reason, new techniques are under investigation, as those based on electromagnetic fields, whose advantages with respect to the traditional ultrasonic and optic devices are widely explained in [
5].
Surprisingly, there is a lack of innovative technologies aimed at helping visually impaired athletes during physical activities, even it is commonly known that sport is an ideal means to promote the integration of disabled people in general and blind people in particular. Sport can help people overcome their disabilities by strengthening their self-esteem and their ability to face difficulties. It is equally true that sight plays an extremely important role in almost every sport. For this reason, the most popular sports among blind people are those specifically thought for people affected by visual diseases (e.g., Torball and Goalball).
Nevertheless, the number of visually impaired people playing many other sports is increasingly growing. Some examples are athletics, judo, swimming, skiing, and football. A visually impaired athlete can play many of them on his/her own, using suitable supports or following the vocal direction of a sighted guide. For example there are no particular difficulties for swimming where, thanks to floating lanes, the races can be played with all the athletes together. A unique special precaution is to allow the coach to touch the athlete on the head with a small stick to indicate that the end of the pool is approaching and to allow the preparation for the turn. As concerns skiing, the modern technique used is based on a radio-guided communication: the instructor gives orders to the blind via a transceiver connected to a radio-headset placed on the head of the athlete.
In some sports, such as running, visually impaired athletes still need to be physically linked to a sighted guide by means of a non-stretchable tether tied around their wrists or held between their fingers so as the distance between them does not exceed 50 cm [
6]. Although many guides are provided with an excellent preparation, the blind athlete’s performance could be limited by the presence of the sighted guide. This is mostly true for long races, such as marathons, during which blind athletes need to change more than one guide with evident disadvantages and performance limitations.
In literature, few examples of technologies aimed at improving independence of blind athletes can be found. For example, Balmer proposed a system based on the measurement of the magnetic field produced by a wire properly laid along the side of the track [
7]. The field measured is then processed and compared with a reference signal in order to obtain information about athlete’s position relative to the correct track and to produce a suitable signal to alert the runner about the correct direction to follow. The main disadvantage of such a system is the use of acoustic warnings. In fact, it is commonly known that vibration warnings are to be preferred since auditory feedbacks occupy user’s acoustic channel with the possibility of confusing and annoying him. Another recently developed device is the Remote Guide [
8] able to guide the blind person in the correct direction through auditory and vibrational sensors used to communicate the directions given remotely by a sighted guide. It is clear how this device is able to avoid the presence of the guide linked to the athlete during race, but it does not improve the independence of blind runners in a significant way and still presents limitations due to the necessity of following the vocal directions of a coach.
Another interesting work is the one proposed in 2005 by Hosseini
et al., concerning the realization of an electrical system to make blind people capable of safely navigating and quickly avoiding obstacles and other hazards while riding a bicycle without any other help [
9]. According to the authors, an interesting application of this system could be in Paralympic sports as a new method for quadriplegics and blind people.
In this context, the main aim of this paper is to investigate the possibility of designing a system able to help a visually impaired person walking or running autonomously, by guiding him/her along a desired path. In particular, the system described in the following is based on electromagnetic (EM) technology. Obviously the introduction of a new technology during official races would require a complete review of the rules of the game. Therefore, as first step, it could be interesting to propose the system as a support for training, which also needs the presence of a sighted guide.
The motivation behind the choice of designing a system based on EM fields lies in a previous study conducted by the same authors to demonstrate the feasibility of using EM technology to realize a travel aid to support the autonomous mobility of visually impaired and blind people [
10]. In order to actually investigate the performances of such a system, many tests have been carried out with the collaboration of a blind marathon athlete [
11]. Moved by positive results and feedback, we decided to develop an EM system to support him during his daily running, improving his independence during the training.
Therefore, as
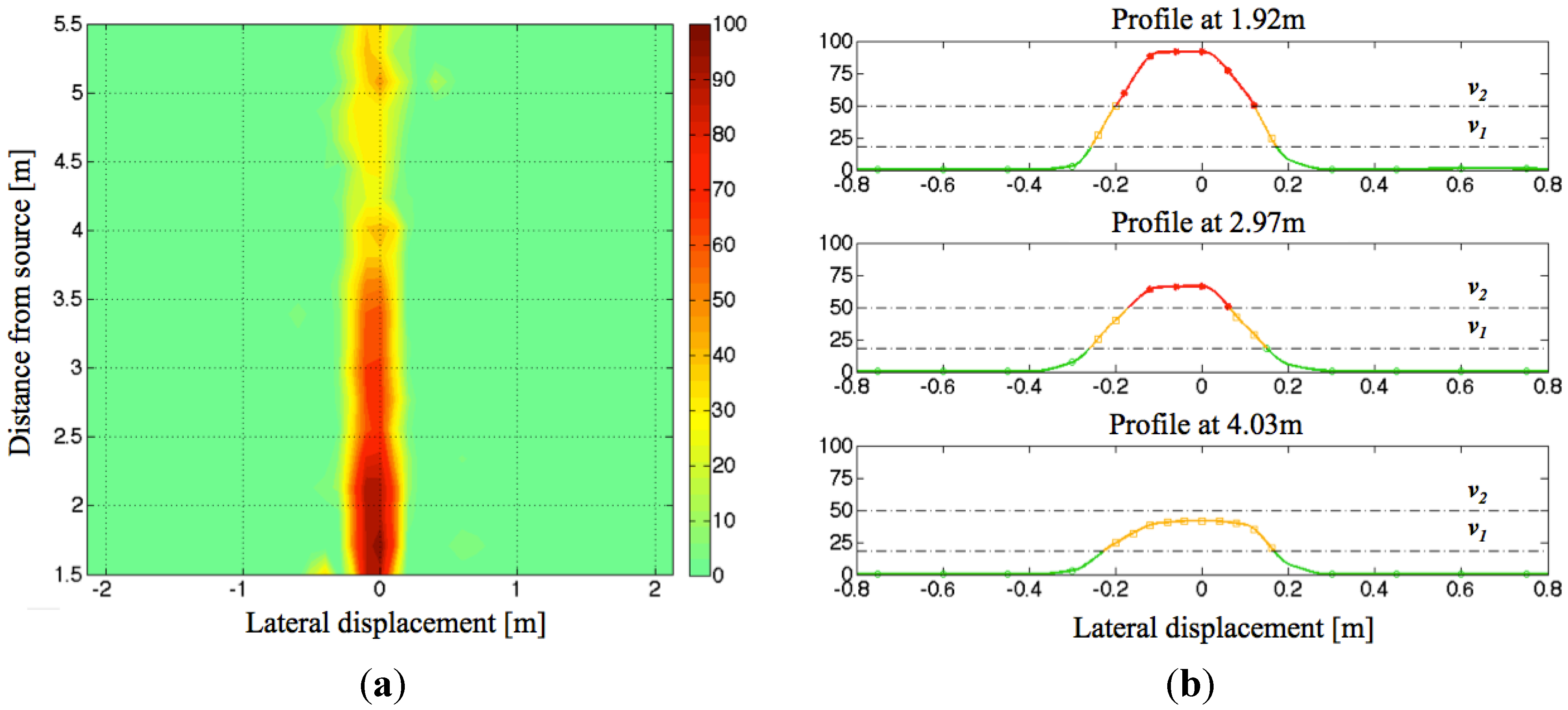
Figure 1 shows, the idea has been to equip a vehicle (that is depicted as a car, but it might be a bike or generally a mobile unit) with two transmitting elements able to generate two radiation patterns shaped as narrow vertical fans (angular width < 10°) delimiting two invisible ‘EM walls’ that confine the runner inside a secure hallway. In order to make sure that the athlete always remains inside the virtual hallway, two vibro-tactile warnings are generated each time he is getting close to one of the borderlines so as to encourage him to move back toward the central position, where no more warnings are produced. In a few words, as the mobile unit goes forward, the runner may safely follow it along a desired path.
It is worth noting that to use the guiding system along complex paths, characterized by tight curves and sudden directional changes, the radiation of wide vertical fans (angular width of about 30° over horizontal plane, typical of commercially available horn antennas) should be preferred. In fact if the EM walls are too narrow, it could be happen that during a sudden tight curve the athlete crosses the EM wall in such a short time that the receiving unit does not have the time to warn him. On the contrary, bearing in mind the desired application of such a technology, that is along athletic tracks (that means no tight curves), the choice of generating narrow EM walls should be preferred because of the possibility to confine the EM fields inside small and well defined regions. To this end two antenna models have been optimized to create ad hoc transmitting and receiving sensors. Moreover, the whole system has been set up using laboratory instrumentation and finally tested thanks to the collaboration of a blind marathon athlete.
Figure 1.
Schematic representation of the guiding system: two transmitting antennas, set on a mobile unit, generate two EM walls delimiting a virtual hallway that can guide the running athlete, properly equipped with the receiving system, along whatever paths.
Figure 1.
Schematic representation of the guiding system: two transmitting antennas, set on a mobile unit, generate two EM walls delimiting a virtual hallway that can guide the running athlete, properly equipped with the receiving system, along whatever paths.
It is important to underline that the aim of this work is not introducing any novelty in antennas and circuits design, but to use the existing EM theory and technologies to propose an innovative application able to improve the quality of life of athletes affected by visual diseases.
The paper is organized as follows: in
Section 2, the whole system proposed is explained in detail, focusing the attention on the two subunits and in particular on the antennas design and realization. In
Section 3, the tests carried out with the blind volunteer are described. In
Section 4, some important suggestions for future developments are discussed. Finally,
Section 5 summarizes all the results obtained so far.
3. Results and Discussion
The EM guiding system performance and its reliability have been tested thanks to the collaboration of an Italian blind athlete, Andrea Cionna, who holds the world record for the fast marathon run by a totally blind man and won two bronze medals in blind long-distance running at the Paralympic Games.
3.1. Set up
The system has been tested on increasingly difficult paths set up in an approximately 20 m × 17 m room of an engineering facility. The transmitting system has been placed on a mobile unit, which was manually pulled off and positioned at a safe distance (about 3 m) in front of the athlete who has been equipped with the receiving unit, as shown in
Figure 14.
At first, a training time was required to instruct Cionna on how to figure out the vibro-tactile warnings coming from his right and left arms and the sound warning. Then a lot of tests with different paths were carried out, equipping the athlete with passive noise-reduction earmuffs in order to limit the orientation by hearing and to prevent him from following the noise arising from the wheels of the mobile unit.
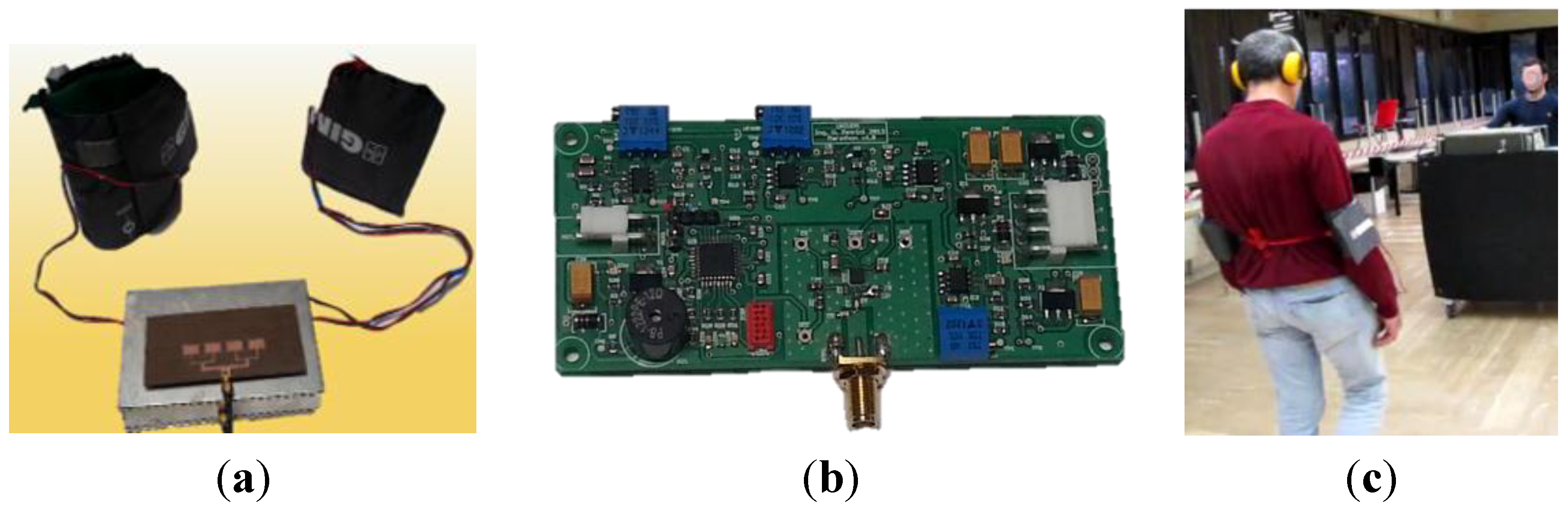
Figure 14.
(a) The receiving unit worn by the user. It consists of a patch antenna, a metallic box containing the signal processing unit and two vibrational armbands; (b) Picture of signal processing board; (c) Picture of the system in use.
Figure 14.
(a) The receiving unit worn by the user. It consists of a patch antenna, a metallic box containing the signal processing unit and two vibrational armbands; (b) Picture of signal processing board; (c) Picture of the system in use.
3.2. Tests
Some of the tests carried out with the collaboration of the blind volunteer are listed below and the relative movies can be watched on line [
18]:
Test 1: Counterclockwise path type 1: simple turn along room perimeter
Figure 15a (without earmuffs).
Test 2: Clockwise path type 1
Figure 15a (without earmuffs).
Test 3: Path type 2 a turn along room perimeter and a final U-turn,
Figure 15b (without earmuffs).
Test 4: Counterclockwise path type 1
Figure 15a (with earmuffs).
Test 5: Path type 2
Figure 15b, Figure (with earmuffs).
Test 6: Path type 3: complex path with many curves and U-turns,
Figure 15c (with earmuffs).
Test 7: Path type 4: complex path with many curves and U-turns,
Figure 15d (with earmuffs).
The blind athlete performed each path exhibiting repeated changes of direction in the presence of curves, faithfully interpreting the vibro-tactile signals coming from his right and left arms. Path by path new curves have been added without informing the user, in order to disorient him and to make sure that he was performing the test exclusively following the device and not his memory.
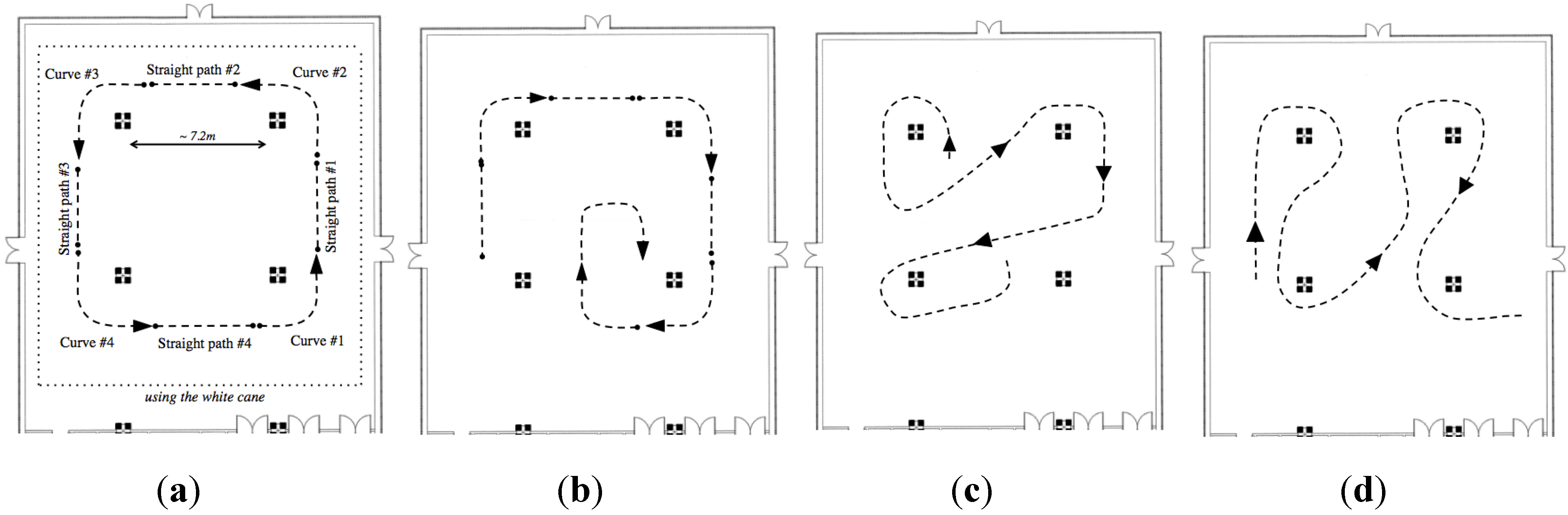
Figure 15.
Schematic representations of different types of path performed in a big room (about 20 m × 17 m) room of an engineering facility. (a) Simple turn along room perimeter. (b) A turn along room perimeter and a final U-turn. (c,d) Complex paths with different curves and U-turns.
Figure 15.
Schematic representations of different types of path performed in a big room (about 20 m × 17 m) room of an engineering facility. (a) Simple turn along room perimeter. (b) A turn along room perimeter and a final U-turn. (c,d) Complex paths with different curves and U-turns.
Significant results can be obtained comparing the time required to complete each test and the relative mean velocity.
Table 5 and
Table 6 summarize these values for all the tests listed above. To better understand, the tests have been divided into two groups: simple paths and more complex paths.
Table 5 concerns the first three tests whose lengths and complexity are comparable, while
Table 6 concerns the more complex paths, whose comparison is more difficult because of the variability of straight paths, curves, and U-turns among tests.
First evidence is that, test by test, the athlete becomes more and more confident with the system; in fact, looking at tests 1, 2, and 3 performed without using the earmuffs, the time required for the complete path gradually reduces and the mean velocities increase.
Then, analyzing tests 1 and 4, which are the same path but performed respectively without and with the passive noise-reduction earmuffs, two evidences can be highlighted. On one hand, as expected, the time increases and the velocities decrease because the athlete cannot use his hearing anymore and consequently he is slightly more hesitant; on the other hand he is still able to walk quite fast and without bumps, meaning that he can satisfy achieving tasks exclusively using the EM guiding system. A similar comparison can be carried out between tests 3 and 5.
Moreover, comparing all the tests carried out with earmuffs, tests 4–7, it is evident that the mean velocity tends to increase, with the only exception of the last test, probably because of its extreme complexity and the exhaustion of the person who was operating the mobile unit. This means that the user, even completely isolated from the surroundings and after a very short training time to become confident with the new technology, is able to perform any unknown path.
Finally, to assess the potentialities of the EM guiding system, its performances have been compared with those of the user’s traditional white cane.
In particular, using the white cane the athlete needed to walk following a reference, repeatedly looking for the contact with the ribbon defining the perimeter of the room. The resulting path is depicted in
Figure 15 as a pointed line: the curves became right angles, the movement insecure and hence the time required for a complete lap is extremely long (about 101 s) if compared with those required to perform the path of type 1 with or without earmuffs. On the other hand, using the EM system proposed, the user is able to gradually walk along the curves, with a good fluidity of movement.
Table 5.
Comparison between paths of type 1 (simple paths).
Table 5.
Comparison between paths of type 1 (simple paths).
| Parameter | Test 1 | Test 2 | Test 4 |
|---|
| Length (m) | 52 | 52 | 52 |
| Time (s) | 60 | 58 | 65 |
| Mean Velocity (m/s) | 0.86 | 0.89 | 0.80 |
| Mean Velocity (m/s) along straight paths | 0.74 | 0.77 | 0.68 |
| Mean Velocity (m/s) along curves | 0.96 | 1.03 | 0.93 |
Table 6.
Comparisons between more complex paths.
Table 6.
Comparisons between more complex paths.
| Parameter | Test 3 | Test 5 | Test 6 | Test 7 |
|---|
| Length (m) | 51 | 61 | 71.50 | 65 |
| Time (s) | 50.46 | 71 | 67.29 | 75 |
| Mean Velocity (m/s) | 1.01 | 0.86 | 1.06 | 0.87 |
The results obtained, together with the user’s positive feedback, clearly demonstrates the effectiveness of the proposed system: the user’s pace is safe, constant, and fast as well as confirmed by the user himself, who declared, at the end of the trial, he always felt protected inside the EM walls.
4. Discussion
The research activity described in this paper has investigated the possibility of realizing a system able to let a visually impaired user to run autonomously.
Therefore, the novelty of the paper lies on the smart use of well-known EM technologies and theories for a new field of application.
For a first step, laboratory instrumentation and homemade antennas have been used to set up the system and preliminary tests have been carried out with a blind end-user.
The encouraging results obtained demonstrate how the EM guiding system is able to actually let the blind volunteer walk autonomously and pave the way for the design of an optimized system.
In fact, bearing in mind user’s feedback, a series of improvements can be made: faster pace could be performed by installing the transmitting subsystem on a vehicle, as a car or a cycle, instead of pulling it manually; sound warnings coming from the ultrasound sensor could be replaced by variable vibrations to communicate to the blind athlete if he is too far or too close to the mobile unit, so as to avoid overcharging the sense of hearing; the size and weight of transmitting and receiving units could be reduced and their displacements optimized to improve comfort, fluidity, and agility.



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}