
A Wavelet-Based Approach to Fall Detection


 ,
,
Abstract
:1. Introduction
2. Methods
2.1. Real-World Falls and ADLs
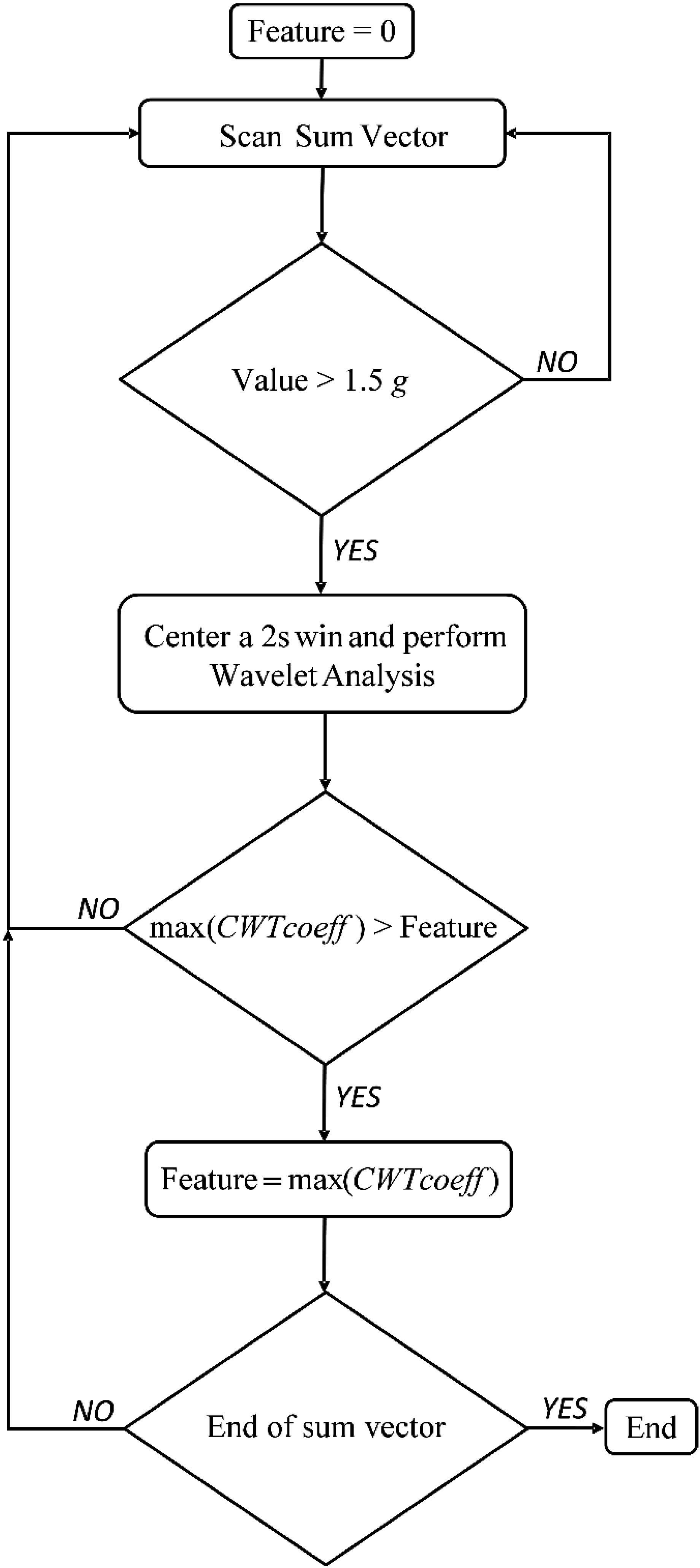
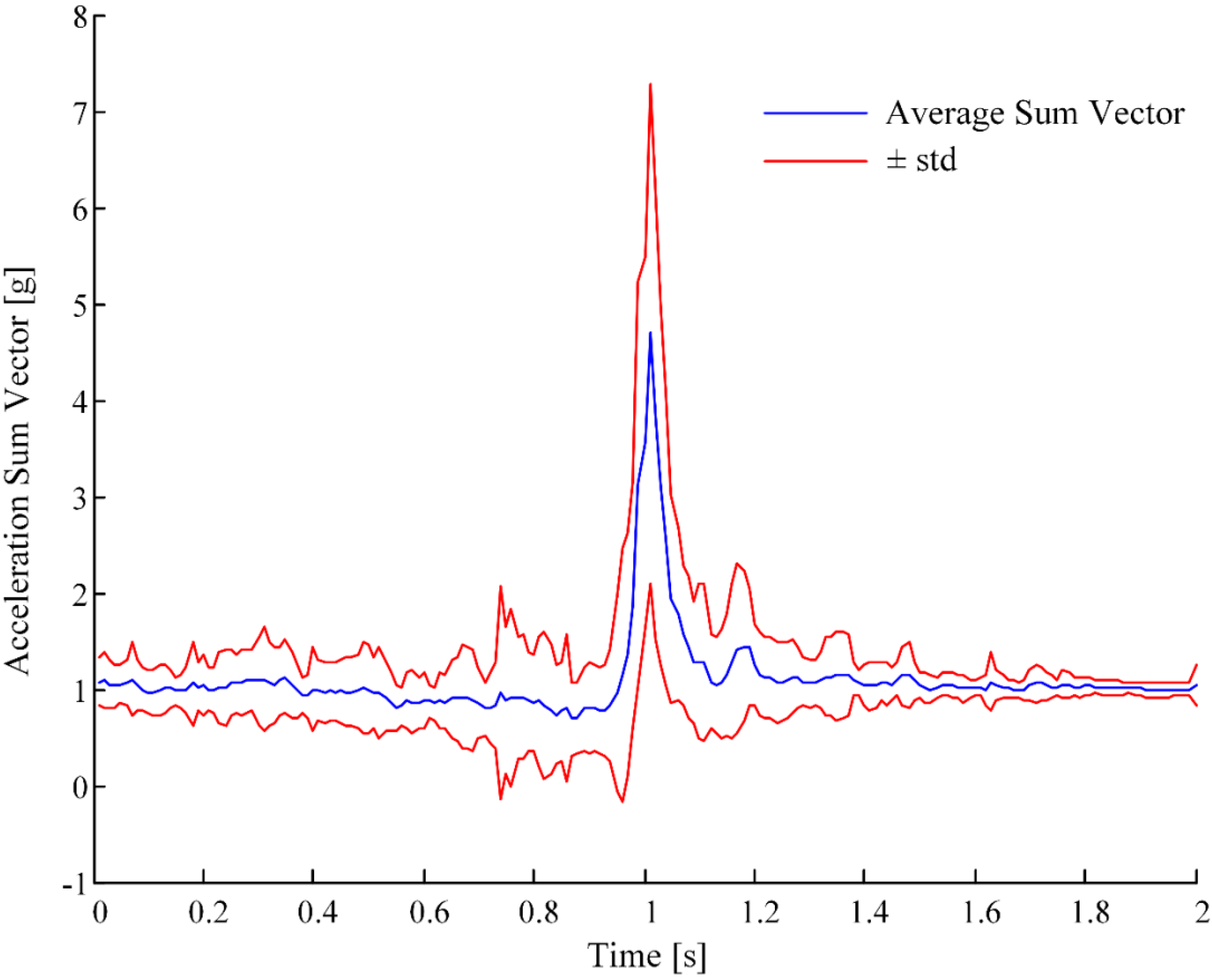
2.2. Computation of the Wavelet-Based Feature

2.3. Performance Evaluation

2.4. Software
3. Results and Discussion

{kind=link}
{kind=link}
{kind=link}
| Wavelet | UPV | LPV | p VS UPV | p VS LPV | |
|---|---|---|---|---|---|
| AUC [95% CI] | 0.918 [0.848 0.99] | 0.898 [0.848 0.949] | 0.821 [0.724 0.919] | 0.152 | 0.002 * |
| max YI [95% CI] | 0.797 [0.697 0.897] | 0.713 [0.613 0.813] | 0.515 [0.45 0.58] | 0.002 * | 0.0078 * |
| Sensitivity | Specificity | Threshold | |
|---|---|---|---|
| Wavelet | 90% | 89.7% | 31.3 |
| UPV | 85% | 86.3% | 2.79 g |
| LPV | 90% | 61.5% | 0.5 g |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fuller, G.F. Falls in the elderly. Am. Fam. Phys. 2000, 61, 2159–2168. [Google Scholar]
- Kannus, P.; Sievänen, H.; Palvanen, M.; Järvinen, T.; Parkkari, J. Prevention of falls and consequent injuries in elderly people. Lancet 2005, 366, 1885–1893. [Google Scholar] [CrossRef] [PubMed]
- Igual, R.; Medrano, C.; Plaza, I. Challenges, issues and trends in fall detection systems. Biomed. Eng. Online 2013, 12. [Google Scholar] [CrossRef]
- Chaudhuri, S.; Thompson, H.; Demiris, G. Fall detection devices and their use with older adults: A systematic review. J. Geriatr. Phys. Ther. 2014, 37, 178–196. [Google Scholar] [CrossRef] [PubMed]
- Schwickert, L.; Becker, C.; Lindemann, U.; Maréchal, C.; Bourke, A.; Chiari, L.; Helbostad, J.L.; Zijlstra, W.; Aminian, K.; Todd, C.; et al. Fall detection with body-worn sensors: A systematic review. Z. Gerontol. Geriatr. 2013, 46, 706–719. [Google Scholar] [CrossRef] [PubMed]
- Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E. Automatic fall monitoring: A review. Sensors 2014, 14, 12900–12936. [Google Scholar] [CrossRef] [PubMed]
- Habib, M.A.; Mohktar, M.S.; Kamaruzzaman, S.B.; Lim, K.S.; Pin, T.M.; Ibrahim, F. Smartphone-based solutions for fall detection and prevention: Challenges and open issues. Sensors 2014, 14, 7181–7208. [Google Scholar] [CrossRef] [PubMed]
- Becker, C.; Schwickert, L.; Mellone, S.; Bagalà, F.; Chiari, L.; Helbostad, J.L.; Zijlstra, W.; Aminian, K.; Bourke, A.; Todd, C.; et al. Proposal for a multiphase fall model based on real-world fall recordings with body-fixed sensors. Z. Gerontol. Geriatr. 2012, 45, 707–715. [Google Scholar] [CrossRef] [PubMed]
- Bagalà, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of Accelerometer-Based Fall Detection Algorithms on Real-World Falls. PLoS ONE 2012, 7, 1–9. [Google Scholar] [CrossRef]
- Özdemir, A.T.; Barshan, B. Detecting falls with wearable sensors using machine learning techniques. Sensors 2014, 14, 10691–10708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Najafi, B.; Aminian, K.; Paraschiv-ionescu, A.; Loew, F.; Büla, C.J.; Robert, P.; Member, S. Ambulatory System for Human Motion Analysis Using a Kinematic Sensor: Monitoring of Daily Physical Activity in the Elderly. IEEE Trans. Biomed. Eng. 2003, 50, 711–723. [Google Scholar] [CrossRef] [PubMed]
- Tamura, T. Wearable accelerometer in clinical use. In Proceedings of the 27th Annual International Conference of the Engineering in Medicine and Biology Society, IEEE-EMBS 2005, Shanghai, China, 17–18 January 2006; Volume 7, pp. 7165–7166.
- Kangas, M.; Korpelainen, R.; Vikman, I.; Nyberg, L.; Jämsä, T. Sensitivity and False Alarm Rate of a Fall Sensor in Long-Term Fall Detection in the Elderly. Gerontology 2014, 61, 61–68. [Google Scholar] [CrossRef] [PubMed]
- Feldwieser, F.; Gietzelt, M.; Goevercin, M.; Marschollek, M.; Meis, M.; Winkelbach, S.; Wolf, K.H.; Spehr, J.; Steinhagen-Thiessen, E. Multimodal sensor-based fall detection within the domestic environment of elderly people. Z. Gerontol. Geriatr. 2014, 47, 661–665. [Google Scholar] [CrossRef] [PubMed]
- Bloch, F.; Gautier, V.; Noury, N.; Lundy, J.-E.; Poujaud, J.; Claessens, Y.-E.; Rigaud, A.-S. Evaluation under real-life conditions of a stand-alone fall detector for the elderly subjects. Ann. Phys. Rehabil. Med. 2011, 54, 391–398. [Google Scholar] [CrossRef] [PubMed]
- Klenk, J.; Becker, C.; Lieken, F.; Nicolai, S.; Maetzler, W.; Alt, W.; Zijlstra, W.; Hausdorff, J.M.; van Lummel, R.C.; Chiari, L.; et al. Comparison of acceleration signals of simulated and real-world backward falls. Med. Eng. Phys. 2011, 33, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Kangas, M.; Vikman, I.; Nyberg, L.; Korpelainen, R.; Lindblom, J.; Jämsä, T. Comparison of real-life accidental falls in older people with experimental falls in middle-aged test subjects. Gait Posture 2012, 35, 500–505. [Google Scholar] [CrossRef] [PubMed]
- Wachowiak, M.P.; Rash, G.S.; Quesada, P.M.; Desoky, A.H. Wavelet-based noise removal for biomechanical signals: A comparative study. IEEE Trans. Biomed. Eng. 2000, 47, 360–368. [Google Scholar] [CrossRef] [PubMed]
- Preece, S.J.; Goulermas, J.Y.; Kenney, L.P.J.; Howard, D. A comparison of feature extraction methods for the classification of dynamic activities from accelerometer data. IEEE Trans. Biomed. Eng. 2009, 56, 871–879. [Google Scholar] [CrossRef] [PubMed]
- Godfrey, A.; Conway, R.; Leonard, M.; Meagher, D.; Olaighin, G.M. A continuous wavelet transform and classification method for delirium motoric subtyping. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 298–307. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Ambikairajah, E.; Lovell, N.H.; Celler, B.G. Accelerometry based classification of walking patterns using time-frequency analysis. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS 2007, Lyon, France, 22–26 August 2007; Volume 2007, pp. 4899–902.
- Sekine, M.; Tamura, T.; Akay, M.; Fujimoto, T.; Togawa, T.; Fukui, Y. Discrimination of walking patterns using wavelet-based fractal analysis. IEEE Trans. Neural Syst. Rehabil. Eng. 2002, 10, 188–196. [Google Scholar] [CrossRef] [PubMed]
- Nyan, M.N.; Tay, F.E.H.; Seah, K.H.W.; Sitoh, Y.Y. Classification of gait patterns in the time-frequency domain. J. Biomech. 2006, 39, 2647–2656. [Google Scholar] [CrossRef] [PubMed]
- Yavuz, G.; Kocak, M.; Ergun, G.; Alemdar, H.; Yalcin, H.; Incel, O.; Ersoy, C. A Smartphone Based Fall Detector with Online Location Support. In Proceedings of PhoneSense 2010, Zurich, Switzerland, 2 November 2010; pp. 31–35.
- Yuwono, M.; Moulton, B.D.; Su, S.W.; Celler, B.G.; Nguyen, H.T. Unsupervised machine-learning method for improving the performance of ambulatory fall-detection systems. Biomed. Eng. Online 2012, 11. [Google Scholar] [CrossRef]
- Su, B.Y.; Ho, K.C.; Rantz, M.J.; Skubic, M. Doppler radar fall activity detection using the wavelet transform. IEEE Trans. Biomed. Eng. 2015, 62, 865–875. [Google Scholar] [CrossRef] [PubMed]
- Yazar, A.; Keskin, F.; Töreyin, B.U.; Çetin, A.E. Fall detection using single-tree complex wavelet transform. Pattern Recognit. Lett. 2013, 34, 1945–1952. [Google Scholar] [CrossRef]
- Misiti, M.; Misiti, Y.; Oppenheim, G.; Poggi, J.-M. Wavelets and Their Applications, 1st ed.; ISTE: London, UK, 2007. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Youden, W.J. Index for rating diagnostic tests. Cancer 1950, 3, 32–35. [Google Scholar] [CrossRef] [PubMed]
- Bourke, A.K.; van de Ven, P.; Gamble, M.; O’Connor, R.; Murphy, K.; Bogan, E.; McQuade, E.; Finucane, P.; Olaighin, G.; Nelson, J. Evaluation of waist-mounted tri-axial accelerometer based fall-detection algorithms during scripted and continuous unscripted activities. J. Biomech. 2010, 43, 3051–3057. [Google Scholar] [CrossRef] [PubMed]
- FARSEEING. Avaliable online: http://farseeingresearch.eu/ (accessed on 17 March 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palmerini, L.; Bagalà, F.; Zanetti, A.; Klenk, J.; Becker, C.; Cappello, A. A Wavelet-Based Approach to Fall Detection. Sensors 2015, 15, 11575-11586. https://doi.org/10.3390/s150511575
Palmerini L, Bagalà F, Zanetti A, Klenk J, Becker C, Cappello A. A Wavelet-Based Approach to Fall Detection. Sensors. 2015; 15(5):11575-11586. https://doi.org/10.3390/s150511575
Chicago/Turabian StylePalmerini, Luca, Fabio Bagalà, Andrea Zanetti, Jochen Klenk, Clemens Becker, and Angelo Cappello. 2015. "A Wavelet-Based Approach to Fall Detection" Sensors 15, no. 5: 11575-11586. https://doi.org/10.3390/s150511575
APA StylePalmerini, L., Bagalà, F., Zanetti, A., Klenk, J., Becker, C., & Cappello, A. (2015). A Wavelet-Based Approach to Fall Detection. Sensors, 15(5), 11575-11586. https://doi.org/10.3390/s150511575