
Entropy-Based Classification of Elementary Cellular Automata under Asynchronous Updating: An Experimental Study


Abstract
1. Introduction
2. Basic Definitions
2.1. Cellular Automata
- fully asynchronous updating: At each time step, the local rule is applied to only one cell, chosen uniformly at random among the set of cells.
- -asynchronous updating: At each time step, each cell has a given probability to apply the rule and a probability to stay in the same state. The parameter is called the synchrony rate.
2.2. Asynchronous Elementary Cellular Automata
- is an one-dimensional ring of length L,
- ,
- is the local transition function.
2.3. Metric Entropy
2.4. Kolmogorov–Sinai Entropy for AECAs
3. Experiment Protocol
3.1. Stop Time of Iterations
3.2. Definition of Experimental Protocol
- and
- The number of max generations N = 10,000
- The number of repeated trials
- The length of cellular ring
3.3. Protocol Limits
| Algorithm 1 Construction of sampling surfaces |
|
4. Classification of Robustness Based on Metric Entropy
4.1. Results of Robustness-Based Classification
- 1.
- Qualitative analysis of sampling surface morphology, such as flat surface, continuous smooth surface, etc.
- 2.
- Quantitative numerical analysis, such as the entropy range when is in the interval [0.2,1) and the discontinuous mutation when , etc.
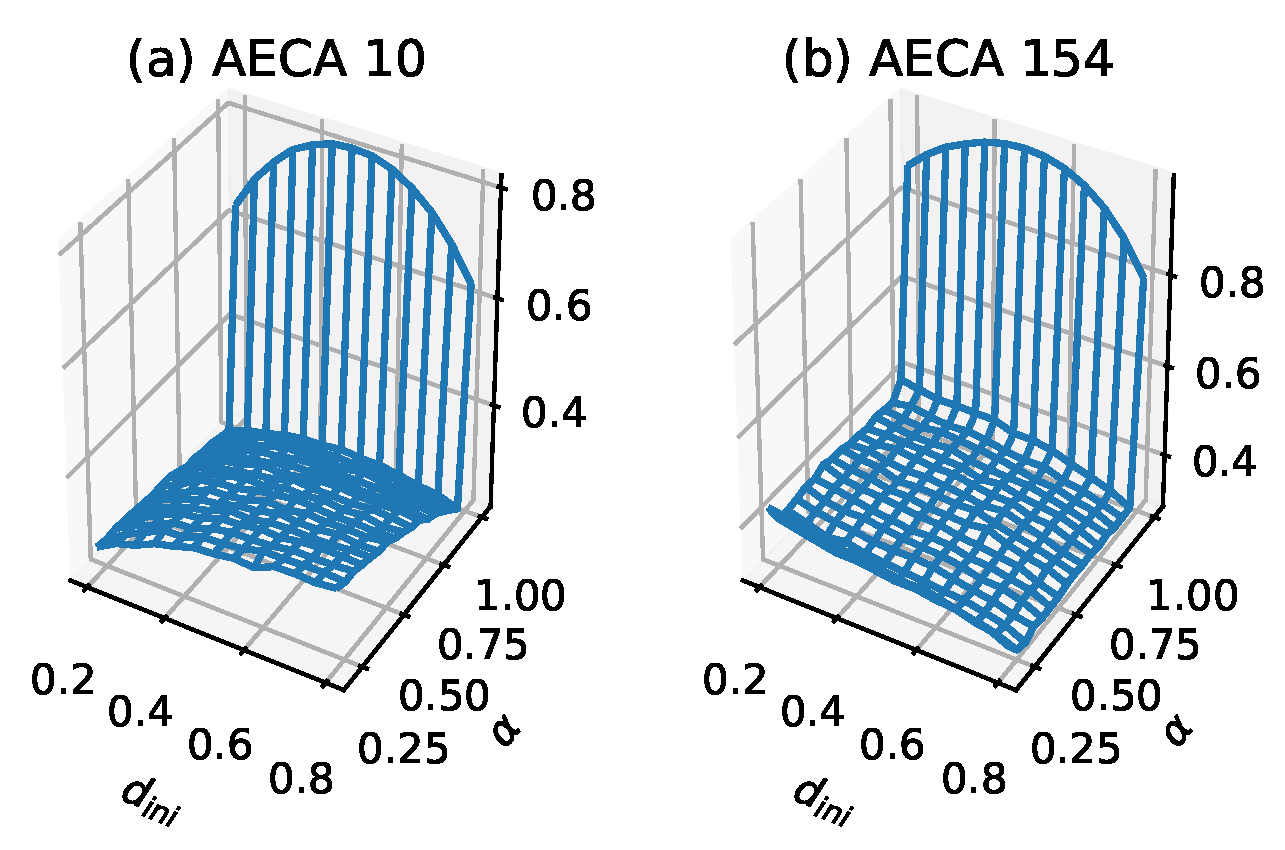
- Class 1: The sampling surface is a high-entropy plane approximately, and discontinuous abrupt changes appear when .
- Class 2: The sampling surface is a low-entropy slope approximately, and discontinuous abrupt changes appear when .
- Class 3: A continuous surface with large fluctuations in the value range, where plays a key role in the influence of the sampling surface than generally.
- Class 4: A smooth continuous surface with large fluctuations in the value range, where has a stronger influence on sampling surface than . Most of the rules show second-order phase transition (SPT).
4.2. Details of Classification of Robustness
4.3. Difference between Metric Entropy-Based and Density-Based Classifications
5. Classification of Uncertainty Based on Kolmogorov–Sinai Entropy
5.1. Results of Uncertainty-Based Classification
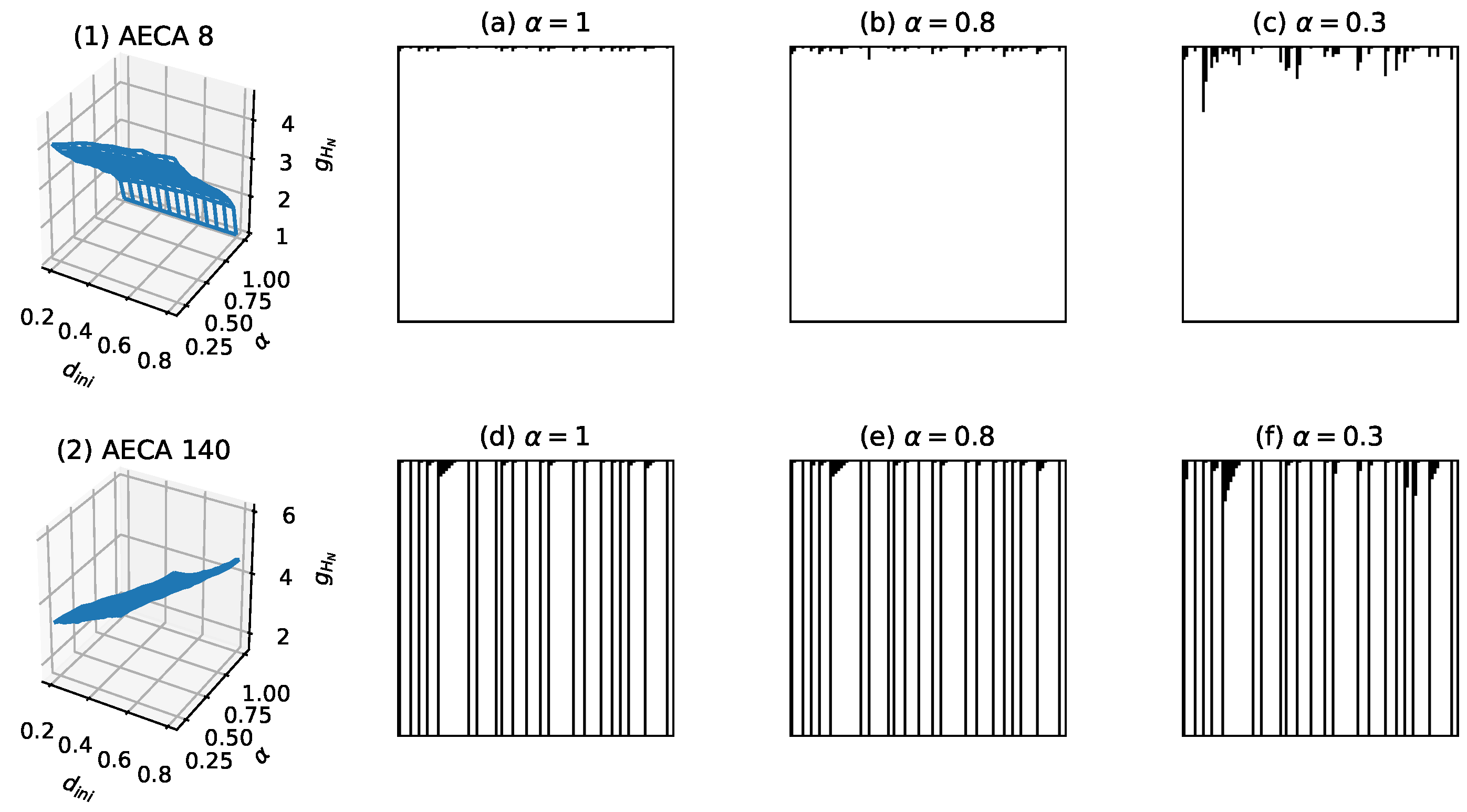
- Class I: All AECAs in Class I show fast convergence during the forward evolutions, thereby yielding low uncertainty (Figure 11). The surfaces of all rules resemble an inclined plane, and some rules may have mutations at .
- Class II: All AECAs in Class II tend to converge but in a speed relatively slower than rules in Class I, resulting in moderate uncertainty (Figure 12). The surface of each rule approximates a non-linear continuous function of the asynchrony rate that will reach the maximum at . The initial density has no effect on the in general.
- Class III: All AECAs in Class III are unable to converge till the end of experiments, thereby causing high uncertainty . The surfaces of all rules are either planar or non-linear functions of the synchronous rate , and a minimum mutation occurs when .
5.2. Details of Classification of Uncertainty
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- von Neumann, J. Theory of Self-Reproducing Automata; University of Illinois Press: Urbana, IL, USA, 1966. [Google Scholar]
- Wolfram, S. Universality and complexity in cellular automata. Phys. D 1984, 10, 1–35. [Google Scholar] [CrossRef]
- Fates, N. A guided tour of asynchronous cellular automata. J. Cell. Autom. 2014, 9, 387–416. [Google Scholar]
- Martinez, G.J.; Seck-Tuoh-Mora, J.C.; Zenil, H. Wolfram’s Classification and Computation in Cellular Automata Classes III and IV; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Martinez, G.J. A note on elementary cellular automata classification. J. Cell. Autom. 2013, 8, 233–259. [Google Scholar]
- Riedel, J.; Zenil, H. Cross-boundary behavioural reprogrammability reveals evidence of pervasive universality. Int. J. Unconv. Comput. 2018, 13, 309–357. [Google Scholar]
- Ingerson, T.; Buvel, R. Structure in asynchronous cellular automata. Phys. Nonlinear Phenom. 1984, 10, 59–68. [Google Scholar] [CrossRef]
- Fates, N.; Morvan, M. An experimental study of robustness to asynchronism for elementary cellular automata. Complex Syst. 2004, 16, 1–27. [Google Scholar]
- Martin, B. Apparent entropy of cellular automata. Complex Syst. 2000, 12, 135–155. [Google Scholar]
- Shannon, C. A Mathematical Theory of Communication. Mob. Comput. Commun. Rev. 2001, 5, 3–55. [Google Scholar] [CrossRef]
- Zenil, H.; Villarreal-Zapata, E. Asymptotic behaviour and ratios of complexity in cellular automata. Int. J. Bifurc. Chaos 2013, 23, 1350159. [Google Scholar] [CrossRef]
- d’Amico, M.; Manzini, G.; Margara, L. On computing the entropy of cellular automata. Theor. Comput. Sci. 2006, 290, 1629–1646. [Google Scholar] [CrossRef]
- Gutjahr, T.; Keller, K. Ordinal pattern based entropies and the Kolmogorov–Sinai entropy: An update. Entropy 2020, 22, 63. [Google Scholar] [CrossRef] [PubMed]
- Maldonado, A.D.; Morales, M.; Aguilera, P.A.; Salmeron, A. Analyzing uncertainty in complex socio-ecological networks. Entropy 2020, 22, 123. [Google Scholar] [CrossRef] [PubMed]
- Chevrou, F.; Hurault, A.; Quéinnec, P. On the diversity of asynchronous communication. Form. Asp. Comput. 2016, 28, 1–33. [Google Scholar] [CrossRef][Green Version]
- Zebende, G.; Penna, T. The Domany-Kinzel cellular automaton phase diagram. J. Stat. Phys. 1994, 74, 1273–1279. [Google Scholar] [CrossRef]
- Schönfisch, B.; de Roos, A. Synchronous and asynchronous updating in cellular automata. BioSystems 1999, 51, 123–143. [Google Scholar] [CrossRef]
- Li, W.; Packard, N. The structure of the elementary cellular automata rule space. Complex Syst. 1990, 4, 281–297. [Google Scholar]
- Fates, N. Directed percolation in asynchronous elementary cellular automata: A detailed study. In Cellular Automata; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Lecomte, V.; Appert-Rolland, C.; Wijland, F.V. Thermodynamic formalism for systems with Markov dynamics. J. Stat. Phys. 2007, 127, 51–106. [Google Scholar] [CrossRef]
- Fates, N. A tutorial on elementary cellular automata with fully asynchronous updating. Nat. Comput. 2020, 19, 179–197. [Google Scholar] [CrossRef]
- Fates, N. Asynchronism induces second order phase transitions in elementary cellular automata. J. Cell. Autom. 2008, 4, 2009. [Google Scholar]
- Roy, S. A study on delay-sensitive cellular automata. Phys. Stat. Mech. Its Appl. 2019, 515, 600–616. [Google Scholar] [CrossRef]
- Boure, O.; Fates, N.; Chevrier, V. Probing robustness of cellular automata through variations of asynchronous updating. Nat. Comput. 2012, 11, 553–564. [Google Scholar] [CrossRef]
- Hazari, R.; Kundu, S.; Bhardwaj, M.; Das, S. ECA 184 can implement any logic circuits. J. Cell. Autom. 2018, 13, 359–371. [Google Scholar]
- Kramer, K.; Koehler, M.; Fiore, C.; Luz, M. Emergence of distinct spatial patterns in cellular automata with inertia: A phase transition-like behavior. Entropy 2017, 19, 102. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Sub-Class | Robustness | Rules |
|---|---|---|---|
| Class 1 | (a) | Stable | 1,3,5,7,11,14,15,19,23,27,29,33,35,43,51,142 |
| (b) | 9,13,22,25,28,30,37,41,45,54,57,60,62,73,77,78,90,94, 105,110,122,126,150,156 | ||
| Class 2 | Stable | 0,2,8,10,24,34,42,56,74,130,152,154,162 | |
| Class 3 | (a) | Unstable | 132,140,170,184,200,204,232 |
| (b) | 4,12,36,44,72,76,104,108,164,172 | ||
| (c) | 32,40,128,136,138,160,168 | ||
| Class 4 | Unstable | 6,18,26,38,46,50,58,106,134,146,178 |
| Class | Sub-Class | Uncertainty | Rules |
|---|---|---|---|
| Class I | (a) | Low | 0,4,5,8,12,13,32,36,40,44,72,76,77,78,94,104,200,204,232 |
| (b) | 128,132,136,140,168,172 | ||
| Class II | Medium | 2,10,24,34,38,42,56,74,130,152,154,162 | |
| Class III | (a) | High | 1,3,9,11,19,22,25,27,33,35,37,41,43,51,54,57,60,62,105,110,122,142 |
| (b) | 7,14,15,23,30,45,90,126,150 | ||
| (c) | 6,18,26,50,58,106,134,146,178 | ||
| (d) | Unbounded | 28,29,73,156,108,138,170,184 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, Q.; Lee, J.; Huang, X.; Kawasaki, S. Entropy-Based Classification of Elementary Cellular Automata under Asynchronous Updating: An Experimental Study. Entropy 2021, 23, 209. https://doi.org/10.3390/e23020209
Lei Q, Lee J, Huang X, Kawasaki S. Entropy-Based Classification of Elementary Cellular Automata under Asynchronous Updating: An Experimental Study. Entropy. 2021; 23(2):209. https://doi.org/10.3390/e23020209
Chicago/Turabian StyleLei, Qin, Jia Lee, Xin Huang, and Shuji Kawasaki. 2021. "Entropy-Based Classification of Elementary Cellular Automata under Asynchronous Updating: An Experimental Study" Entropy 23, no. 2: 209. https://doi.org/10.3390/e23020209
APA StyleLei, Q., Lee, J., Huang, X., & Kawasaki, S. (2021). Entropy-Based Classification of Elementary Cellular Automata under Asynchronous Updating: An Experimental Study. Entropy, 23(2), 209. https://doi.org/10.3390/e23020209