
Wavelet Entropy-Based Traction Inverter Open Switch Fault Diagnosis in High-Speed Railways



Abstract
:1. Introduction
2. Disadvantages of Wavelet and Wavelet Packet in Traction Inverter Diagnosis
2.1. Disadvantages of Wavelet Transform
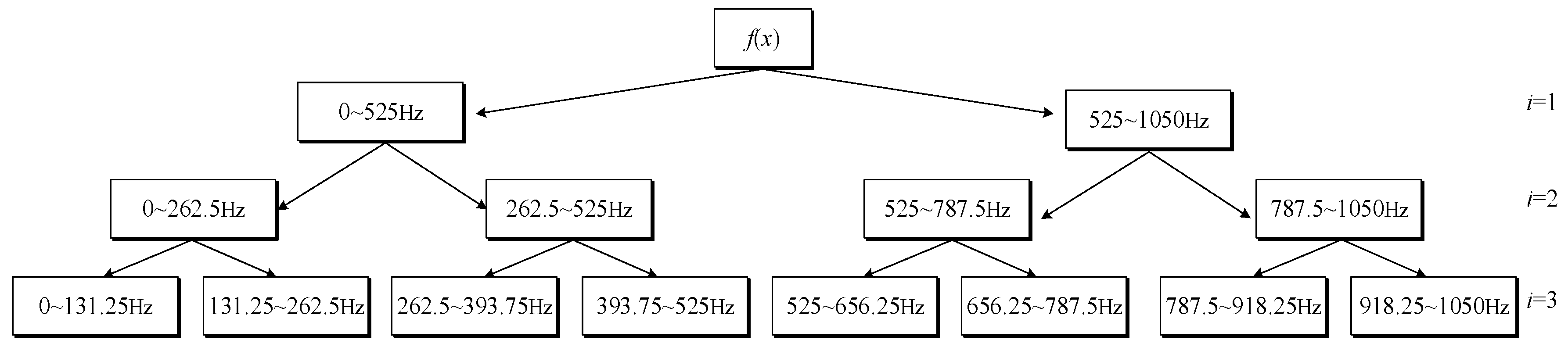
2.2. Disadvantages of Discreet Wavelet Packet Transform
3. Proposed Diagnosis Plan
3.1. Fault Detection Method
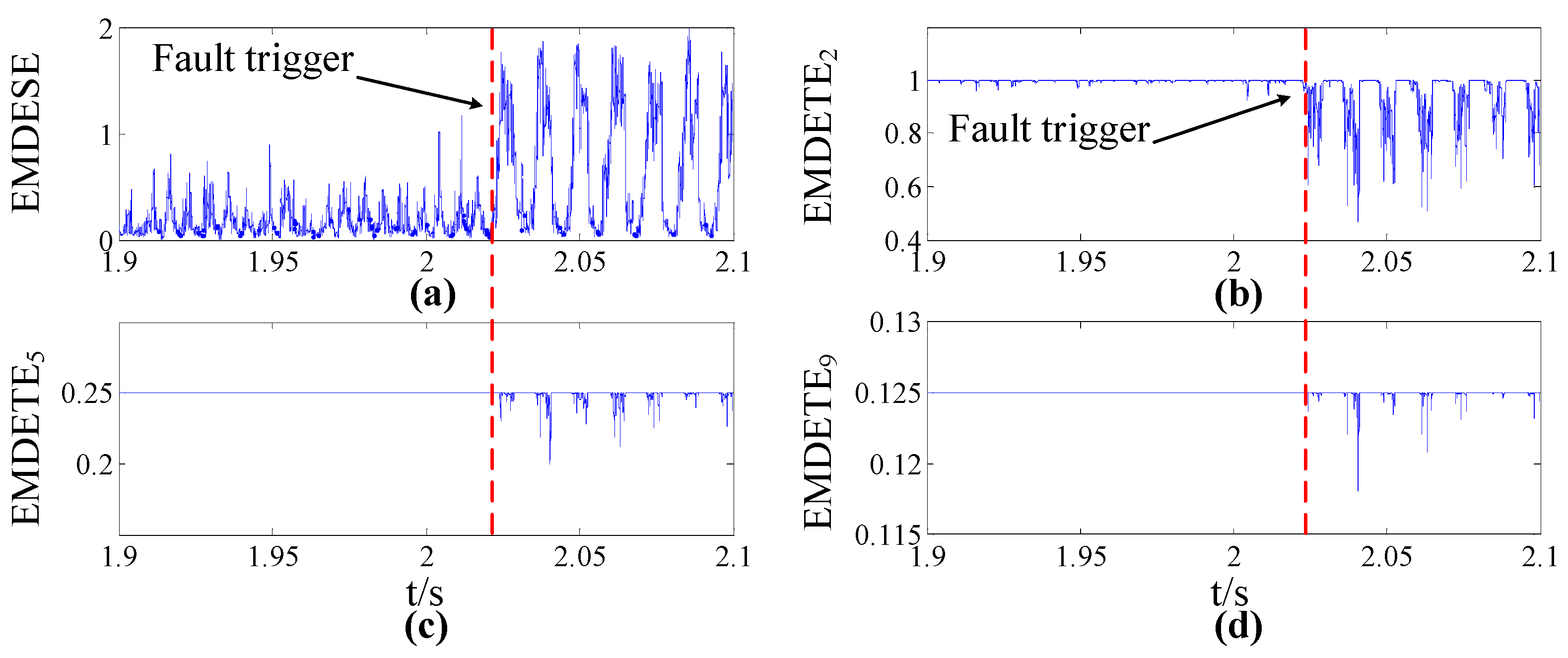
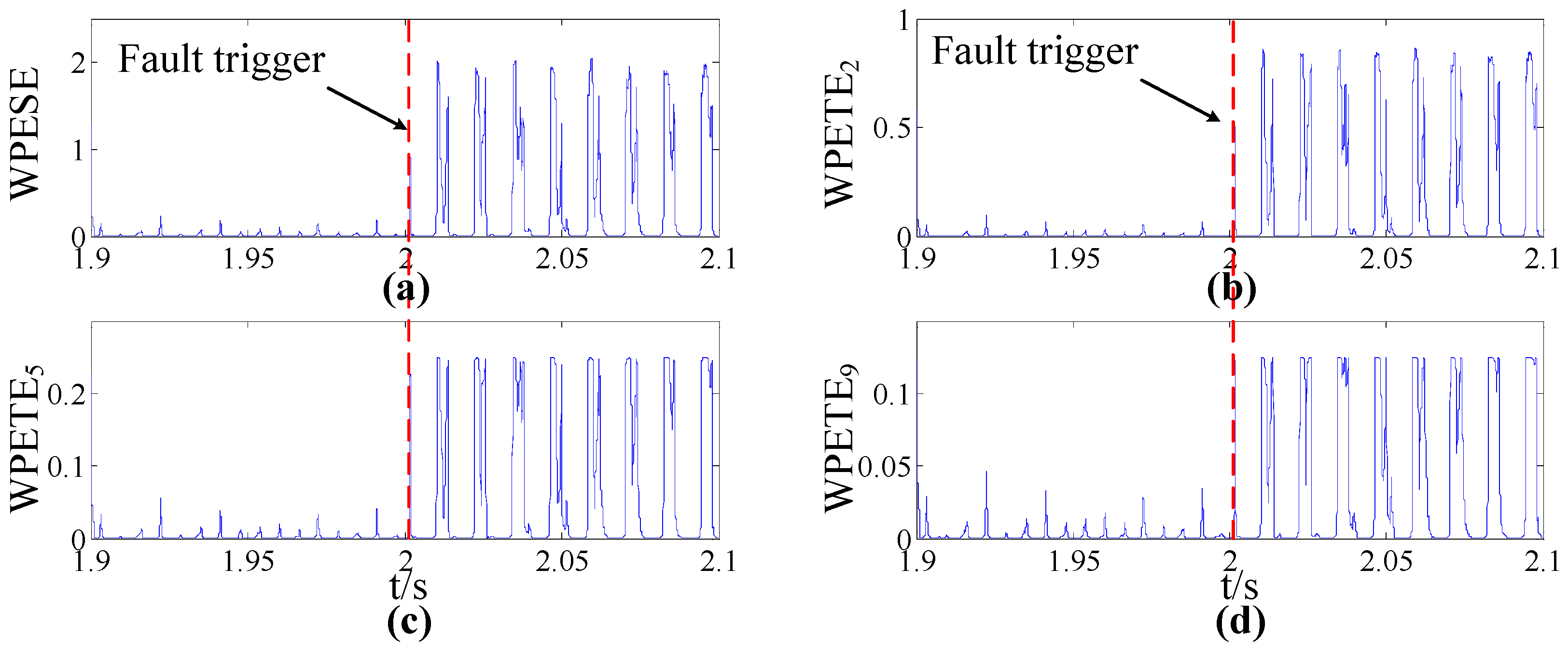
3.1.1. Wavelet Packet Shannon Entropy and Tsallis Entropy
3.1.2. WPESE with a Specific Sub-Band
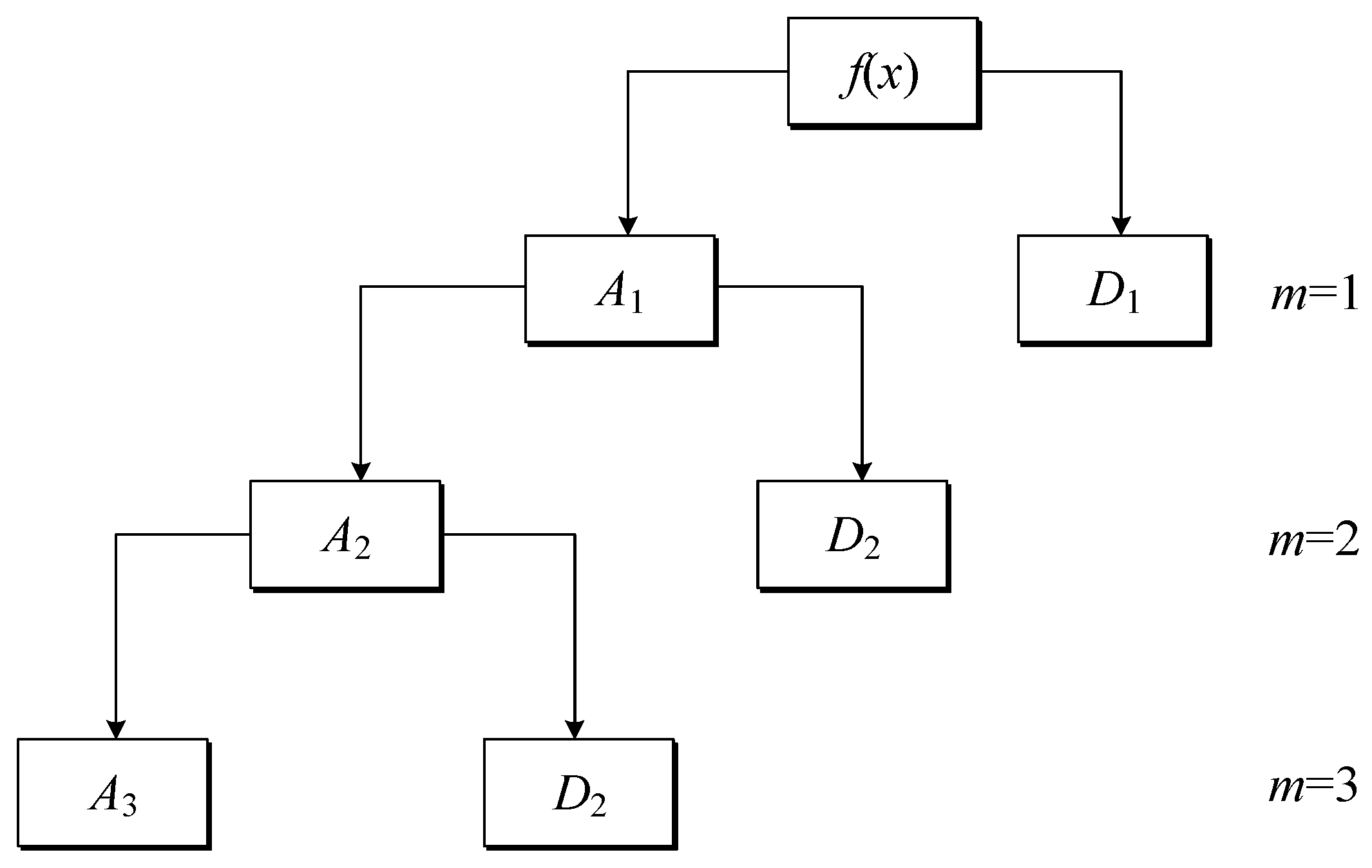
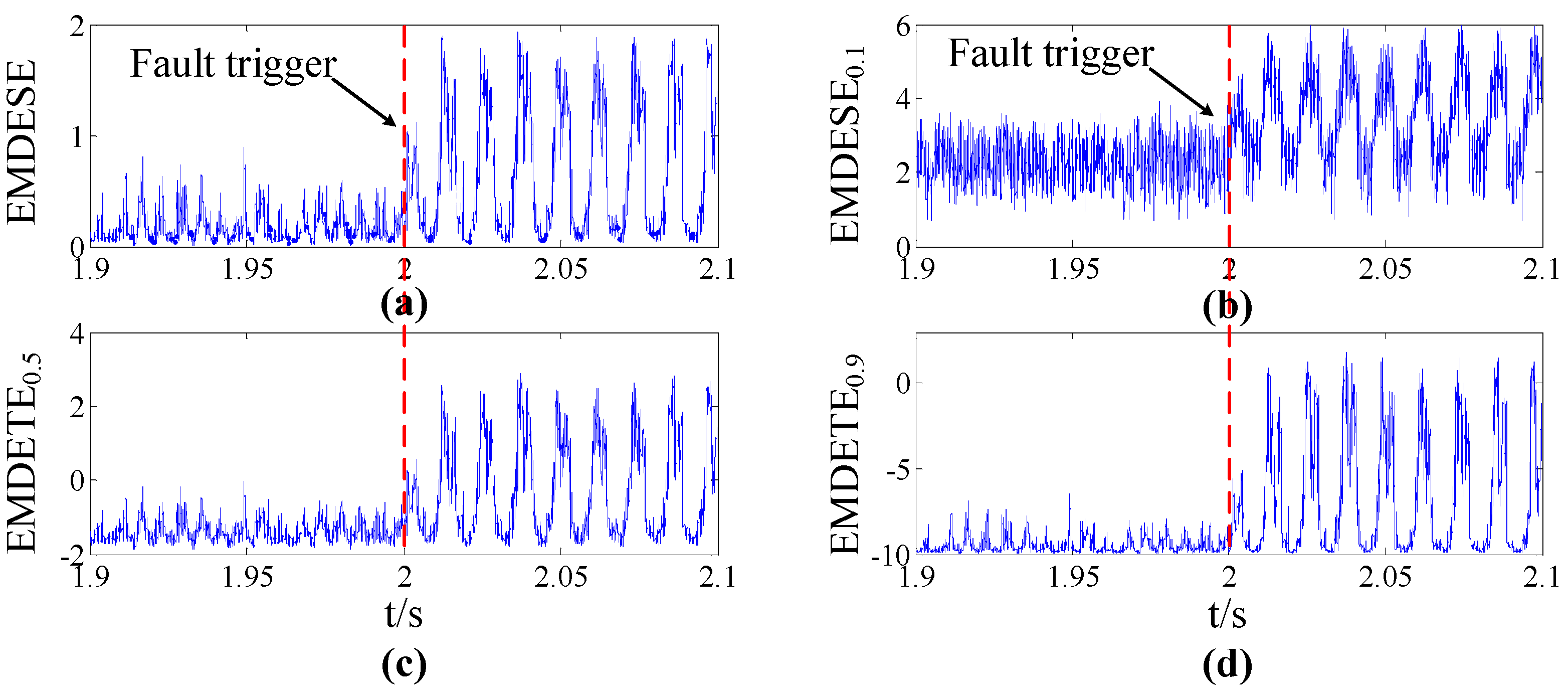
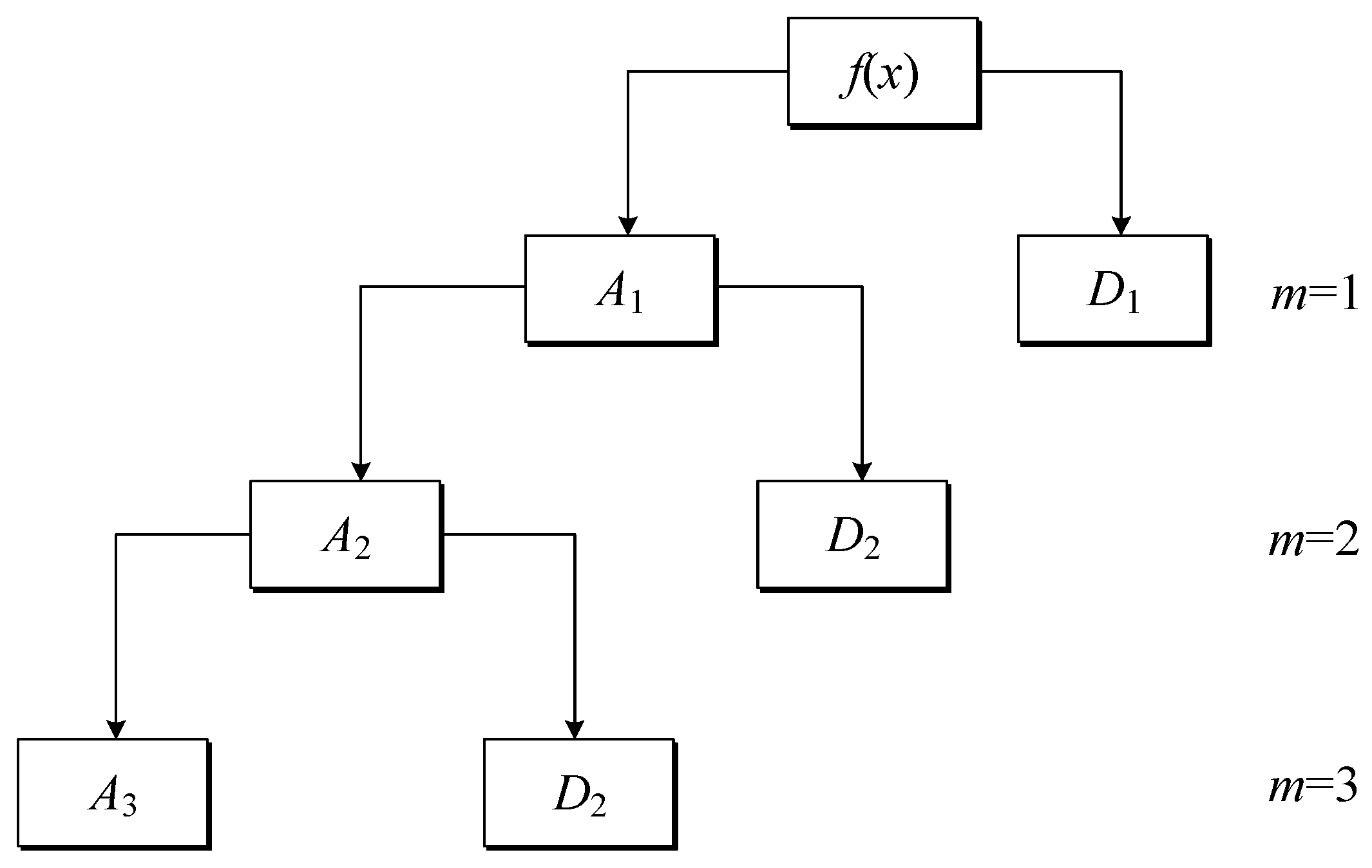
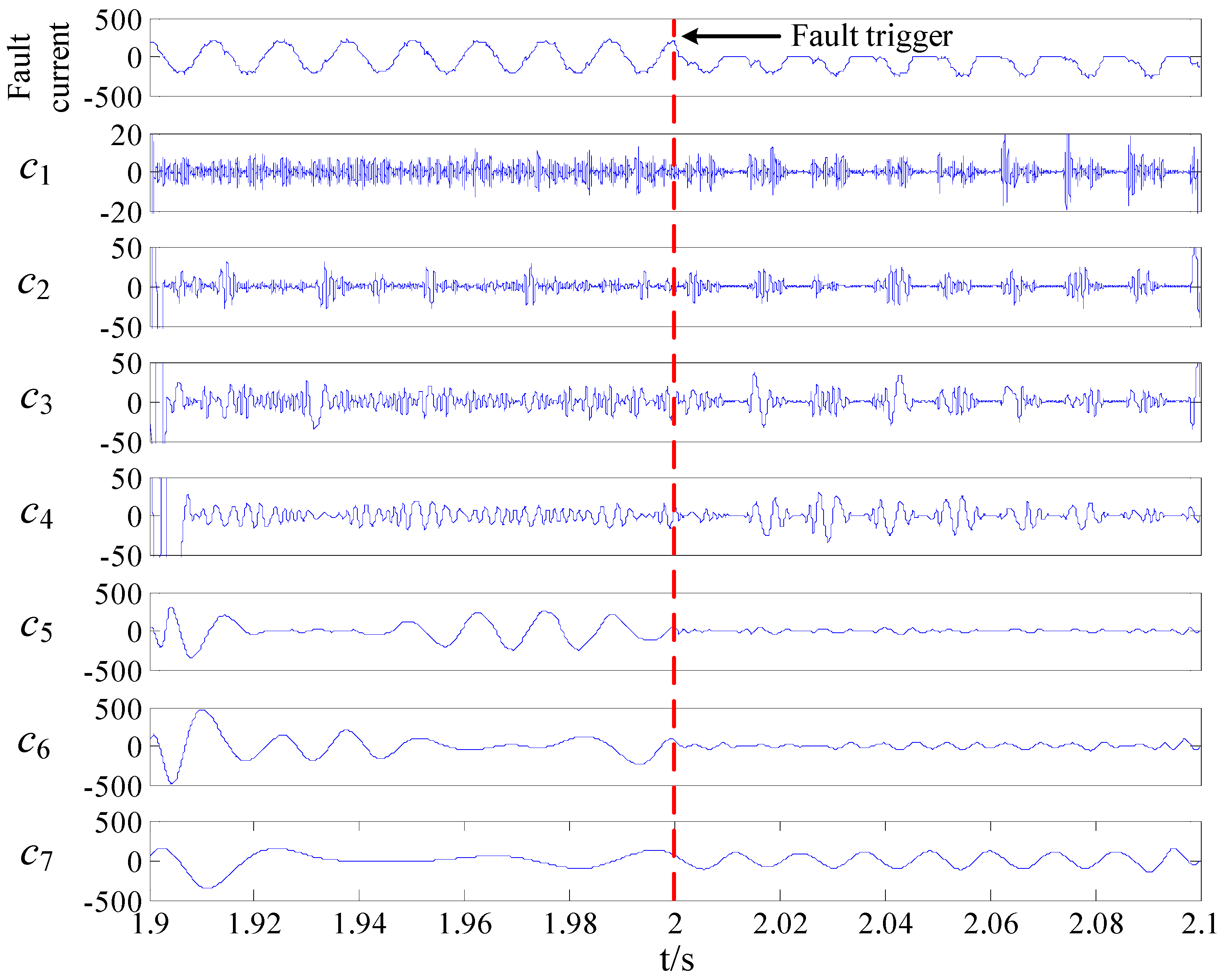
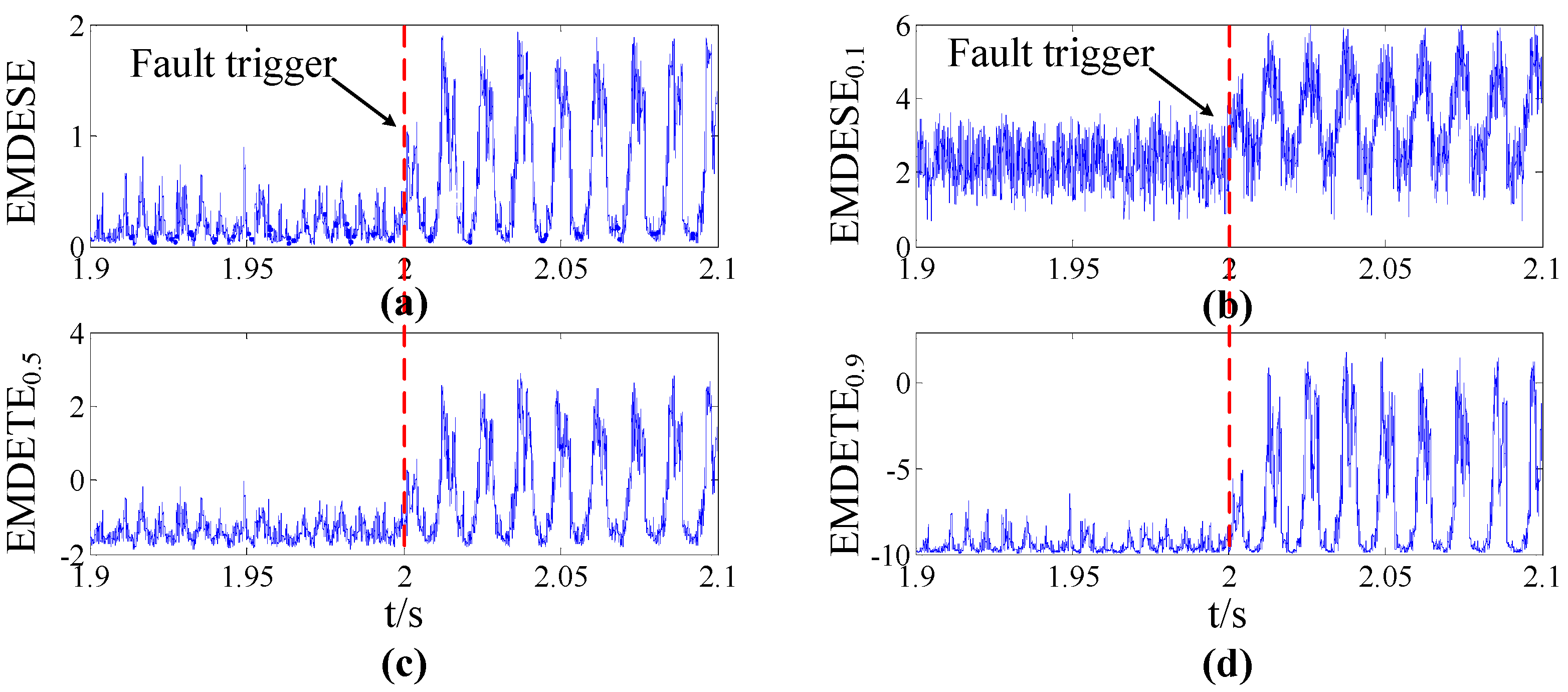
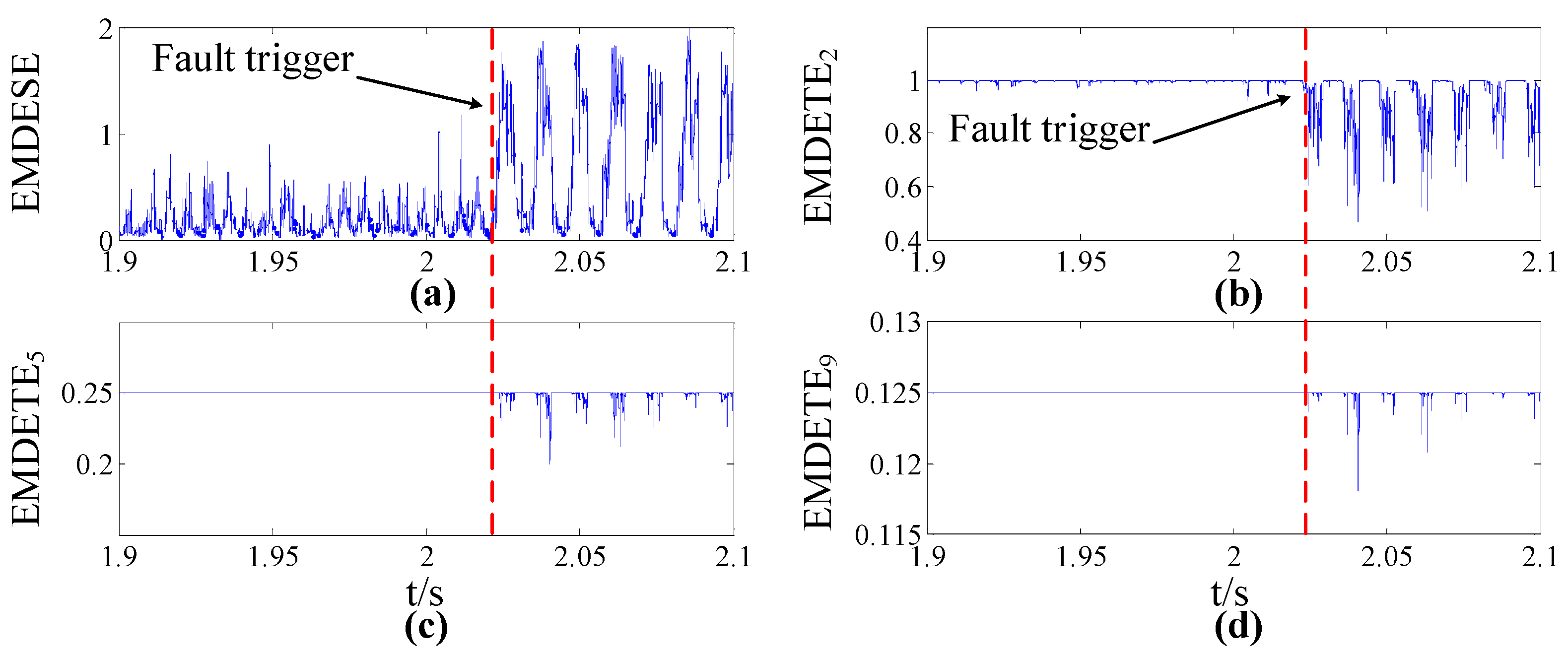
3.1.3. Empirical Mode Decomposition Shannon Entropy and Tsallis Entropy
- (1)
- In the whole data set, the number of extrema and the number of zero-crossings must either be equal or differ at most by one.
- (2)
- At any point, the mean value of the envelope defined by local maxima and the envelope defined by the local minima is zero.
- (1)
- Determine all the local extrema of the original signal.
- (2)
- Connect all the local maxima and minima with cubic spline line, respectively. Thus, the upper envelope and lower envelop can be obtained.
- (3)
- Denote the average value of upper and lower envelop as m1(t), and denote:
- (4)
- If h1(t) satisfies the constraints of IMF, then it is the first IMF of the original signal f(x,t). Else let f(x,t) = h1(t), and repeat the Steps (1)–(3) until h1(k-1)(t) − m1k(t) = h1k(t) (k is the iteration number), which means h1k(t) satisfies the IMF constraints. Denote c1(t) = h1k(t), c1(t)is the first IMF of the original signal.
- (5)
- Separate c1(t) from f(x,t), we can obtain the residual:Let r1(t) be the original signal, repeat the Steps (1)–(4), the second IMF c2(t) can be obtained.
- (6)
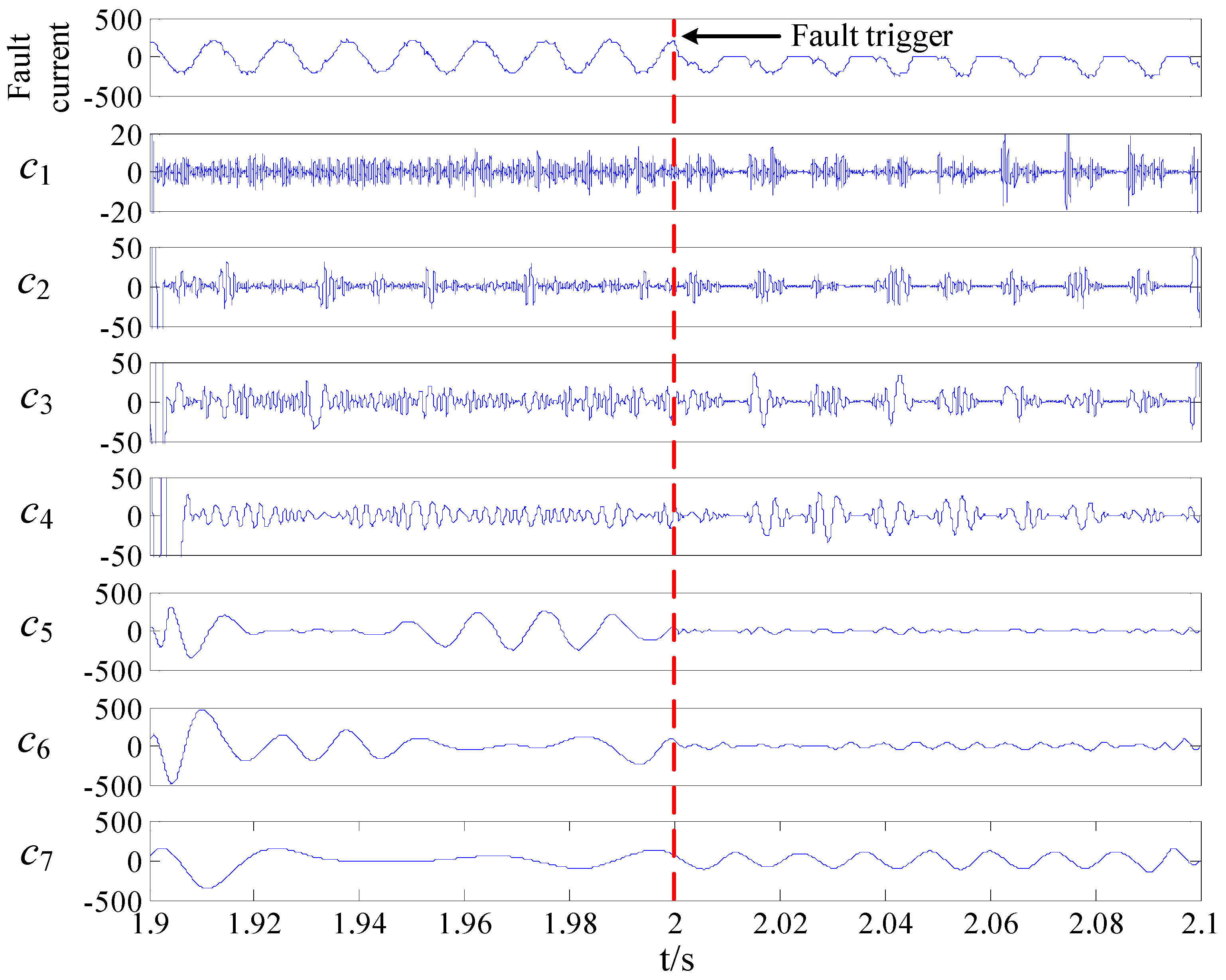
- Repeat the steps above until the residual is monotonous, all the IMFs c1(t), c2(t),…, cn(t) and the final residual rn(t) can be obtained. The original signal can be expressed as:
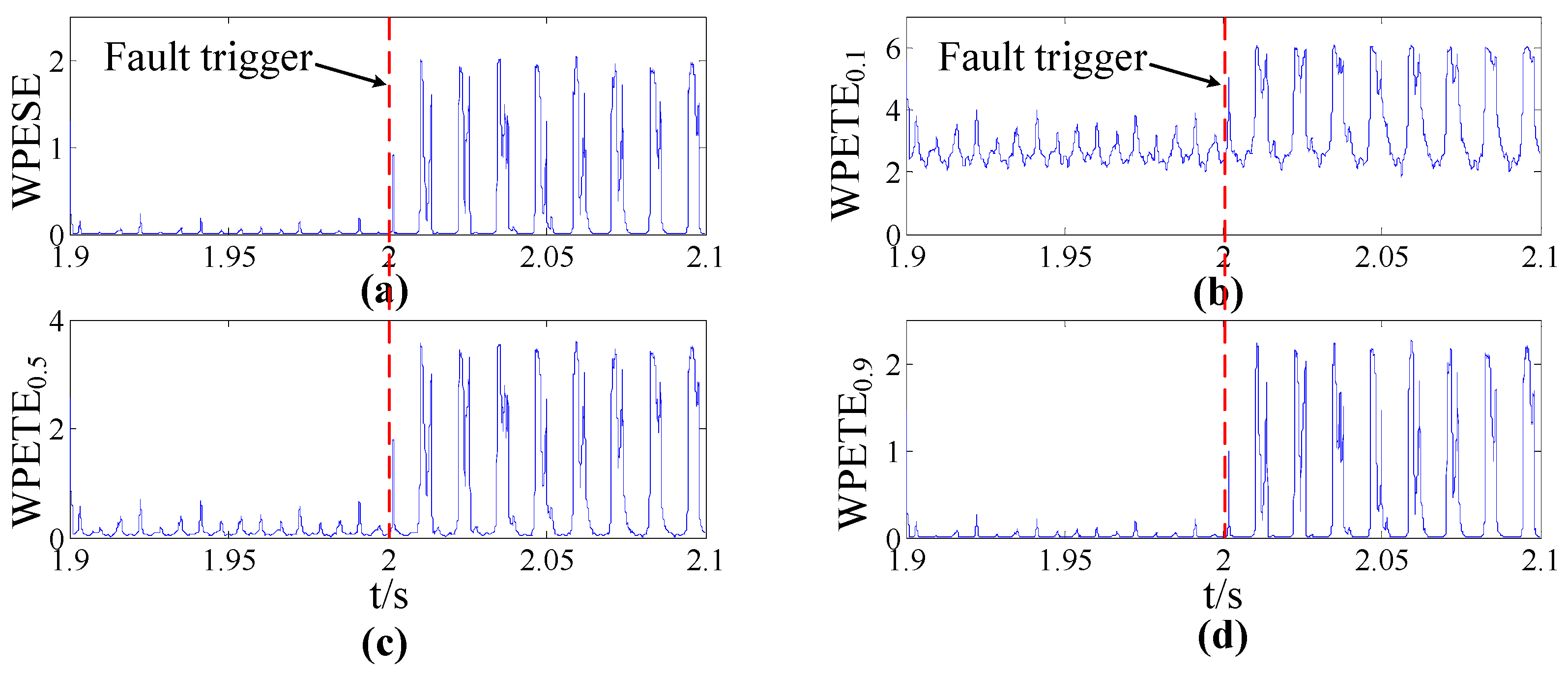
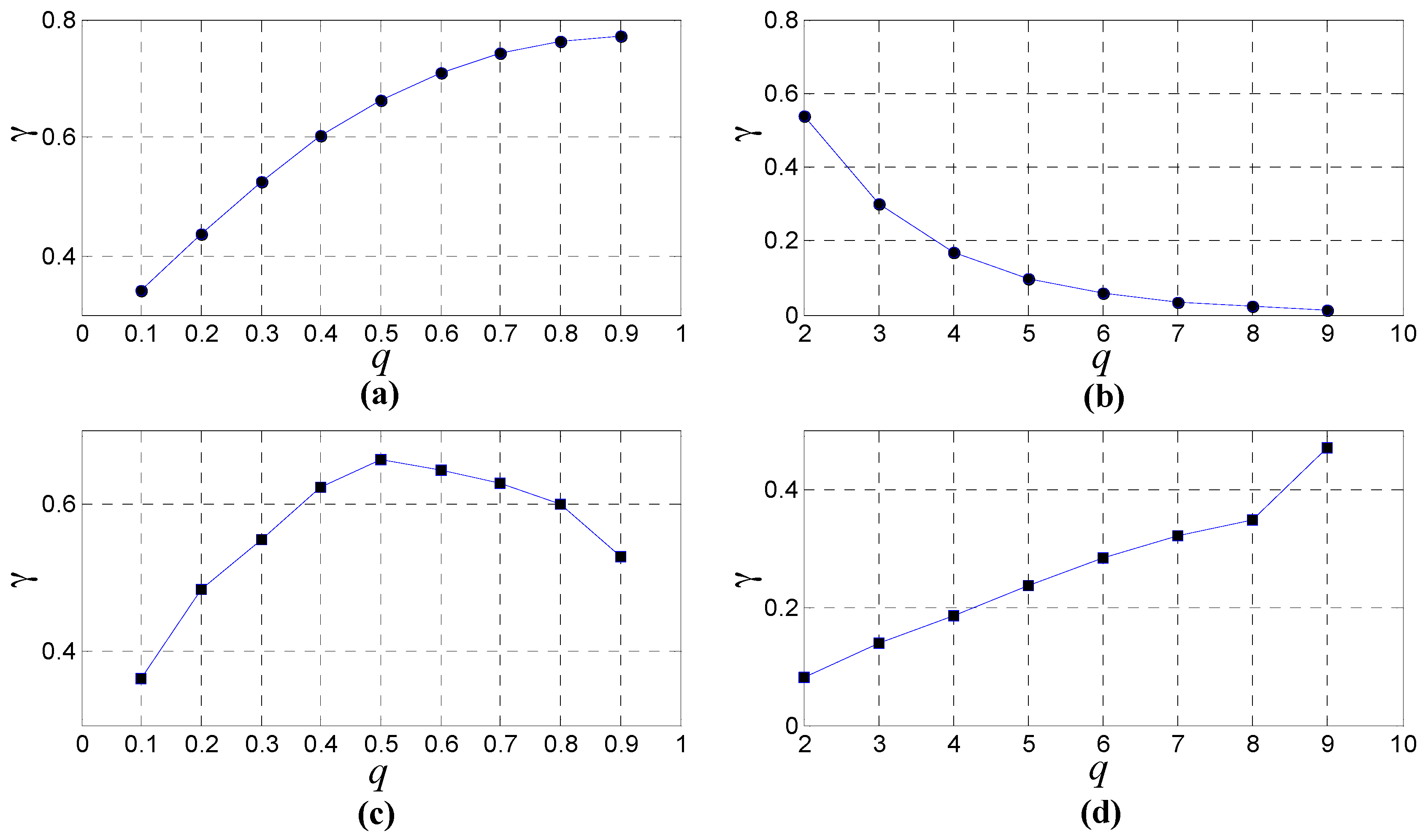
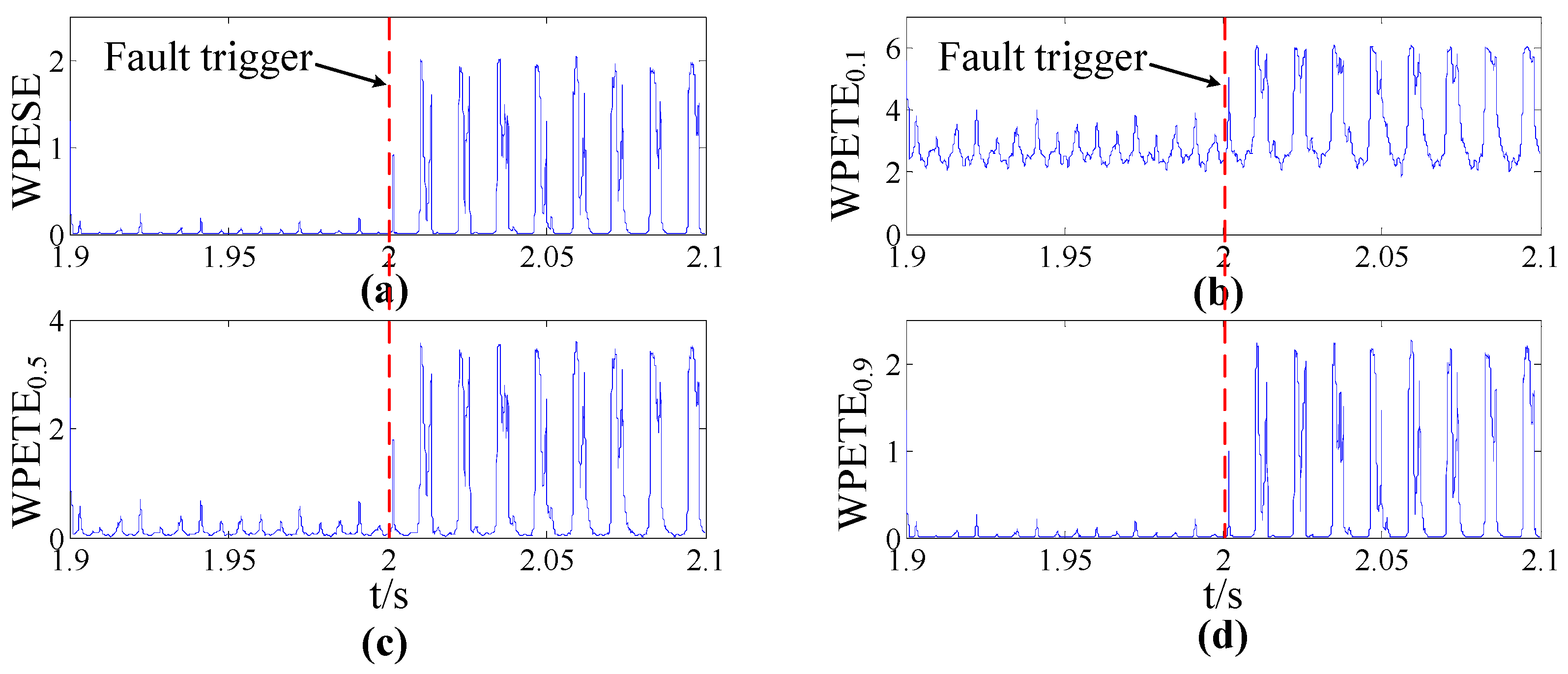
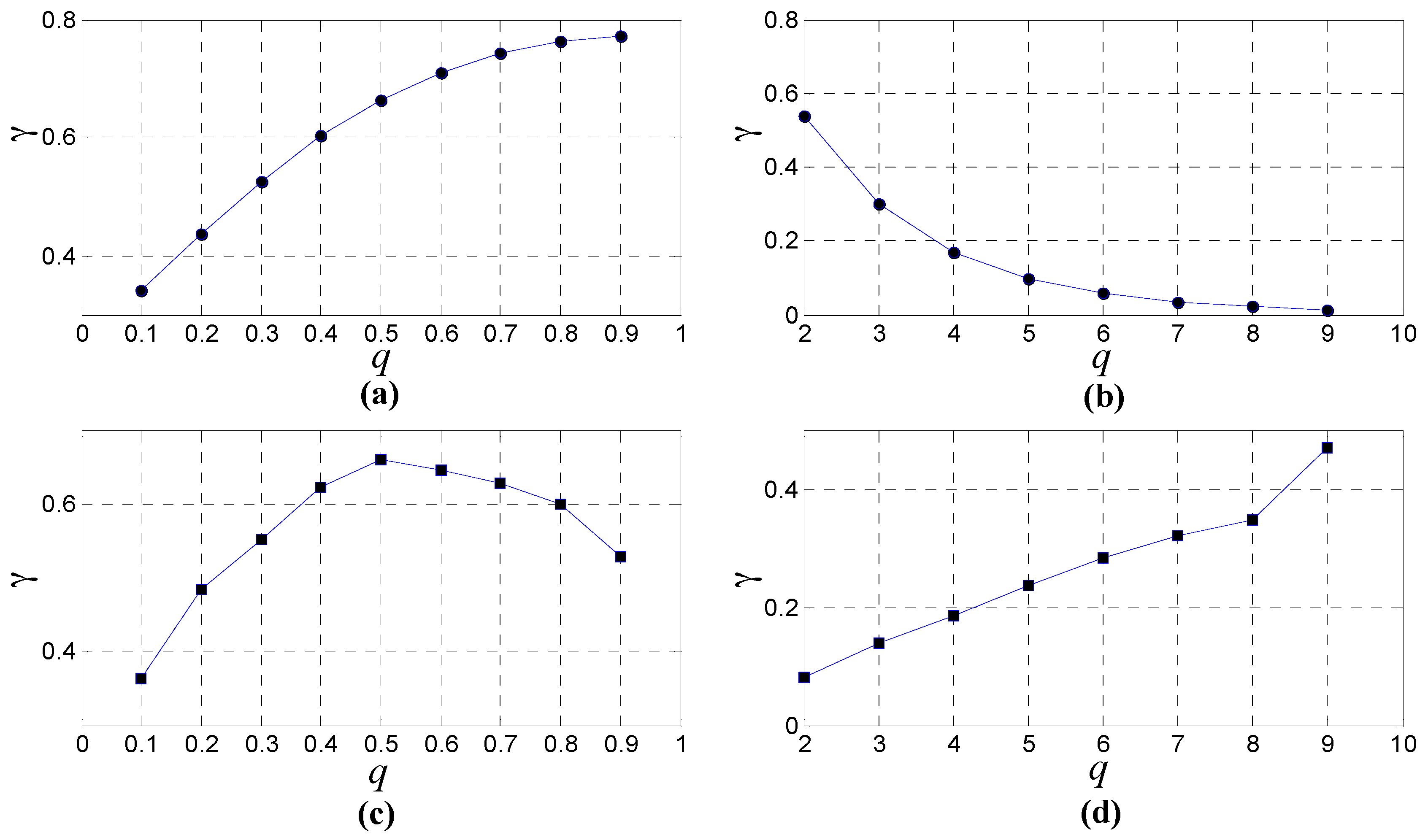
3.1.4. Fault Detection Evaluation
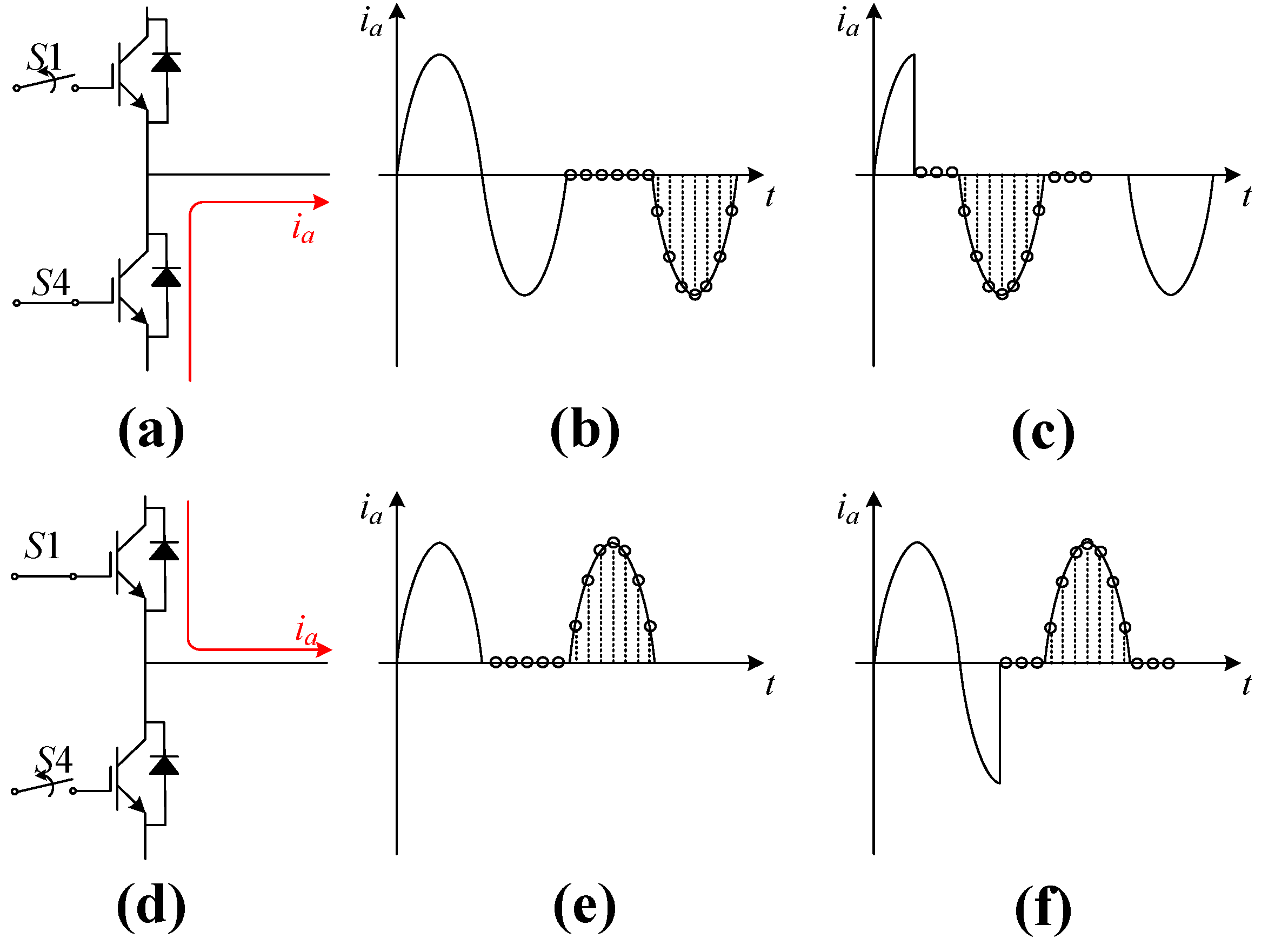
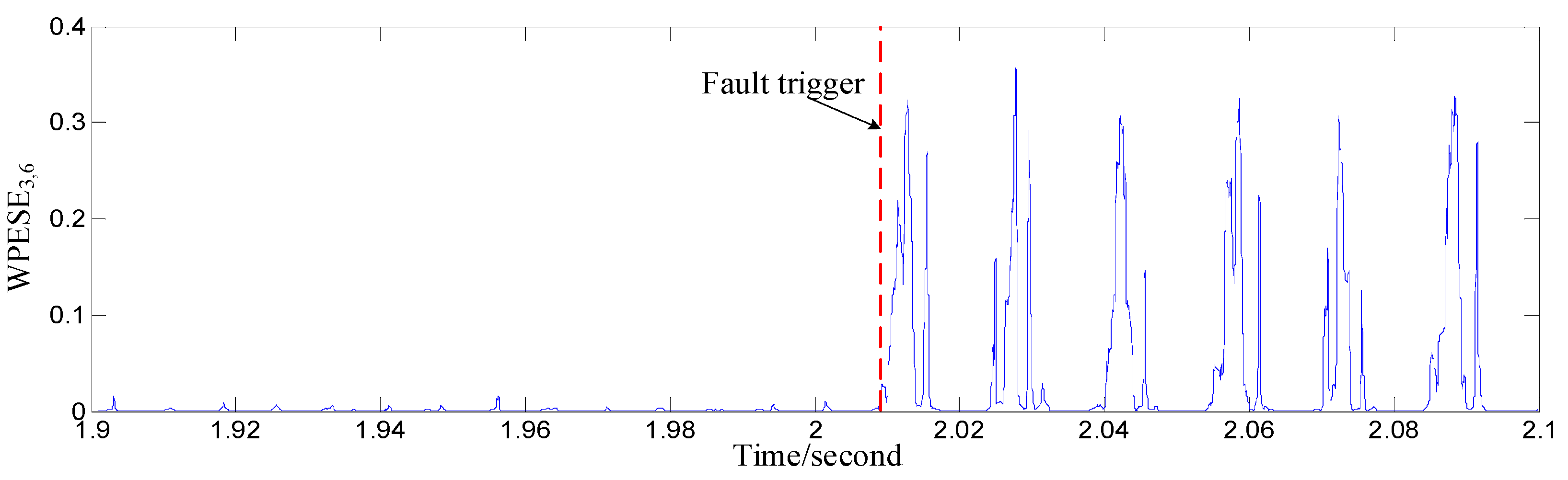
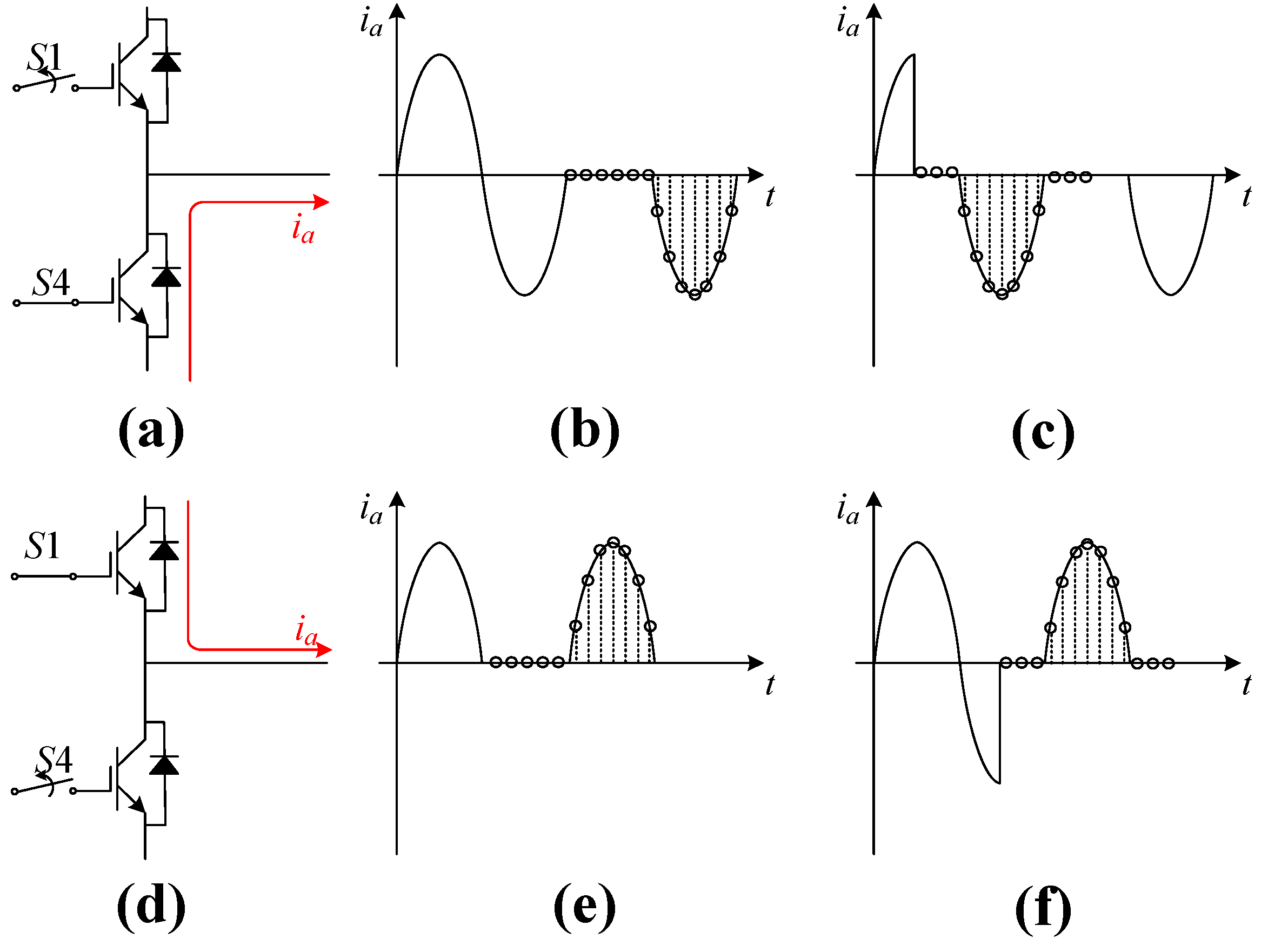
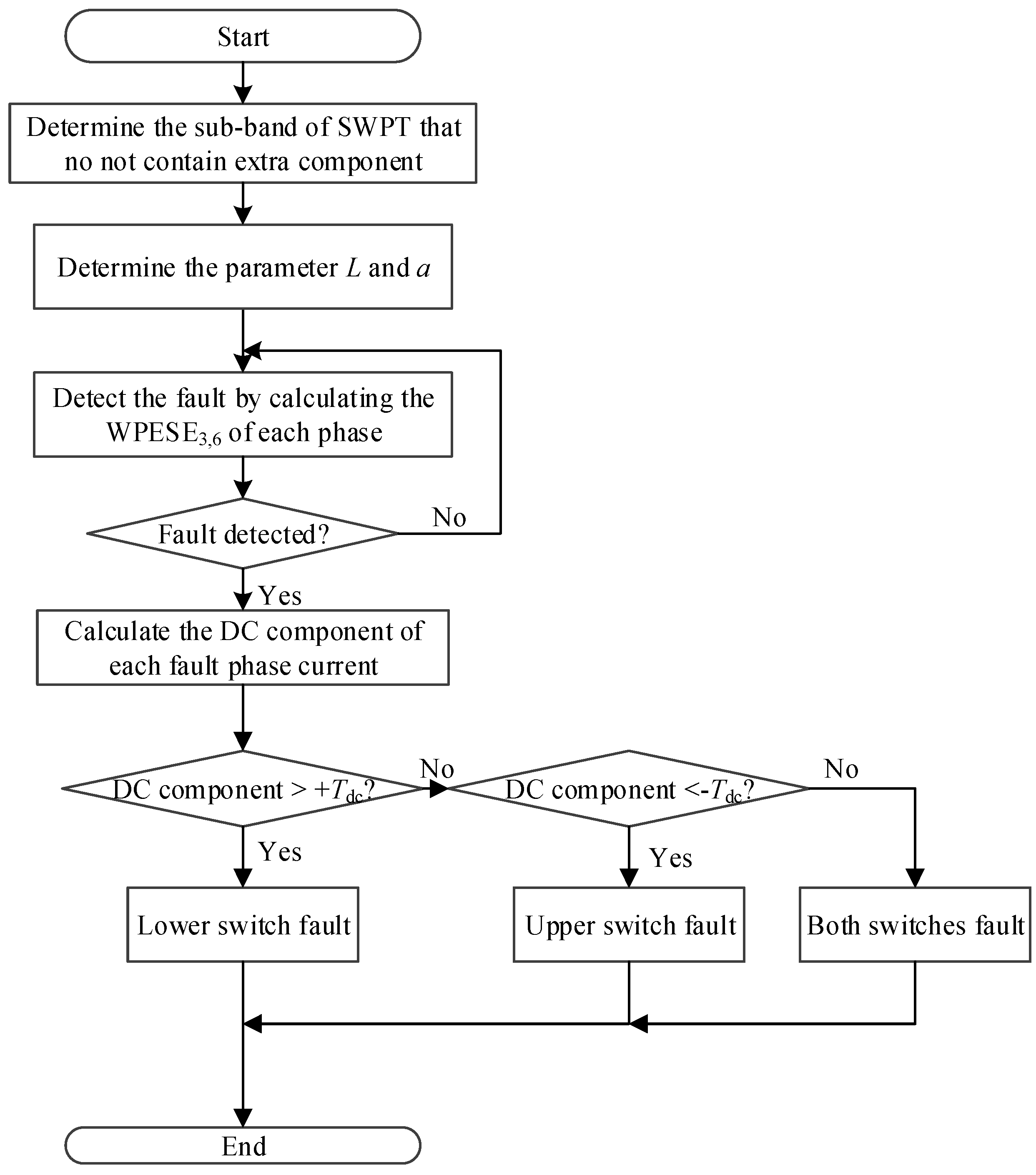
3.2. DC Component and Fault Location
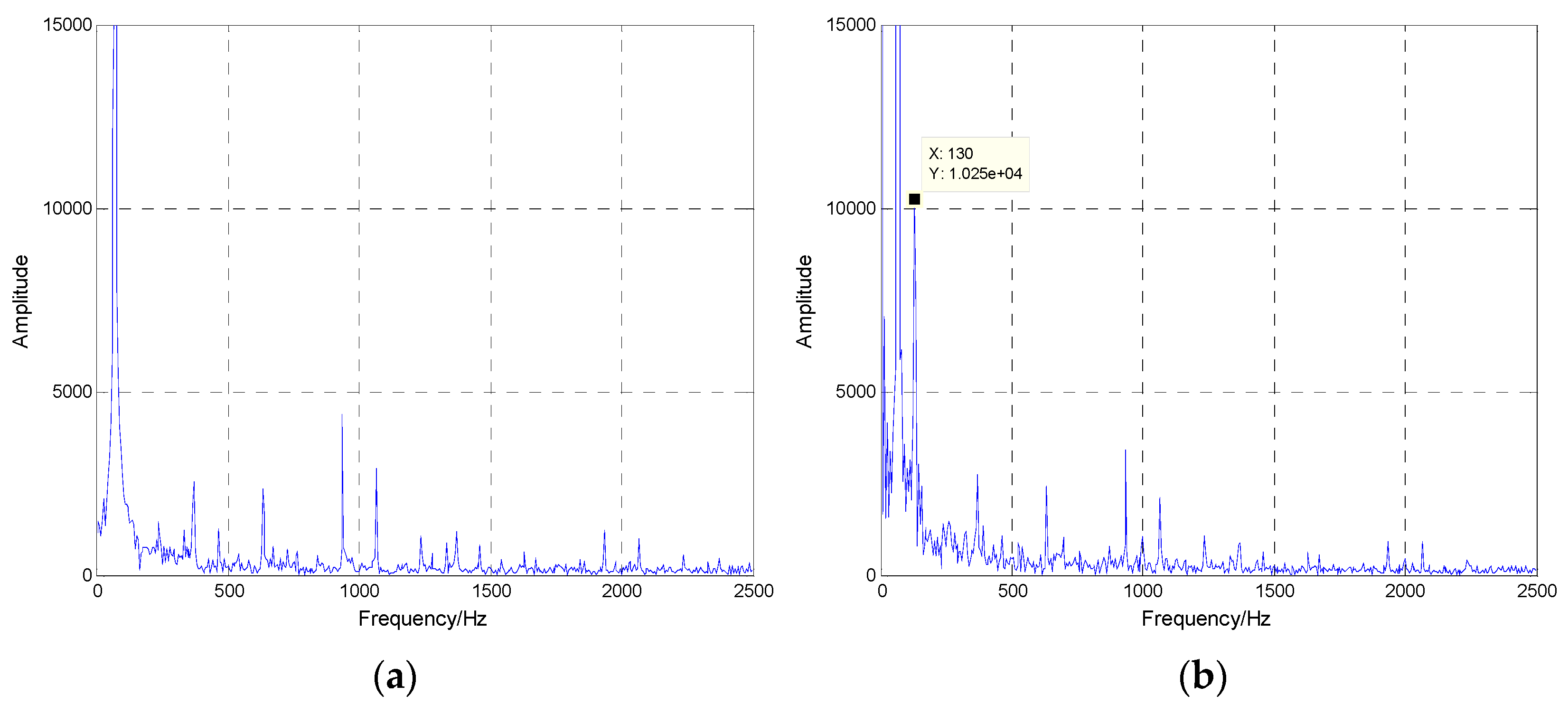
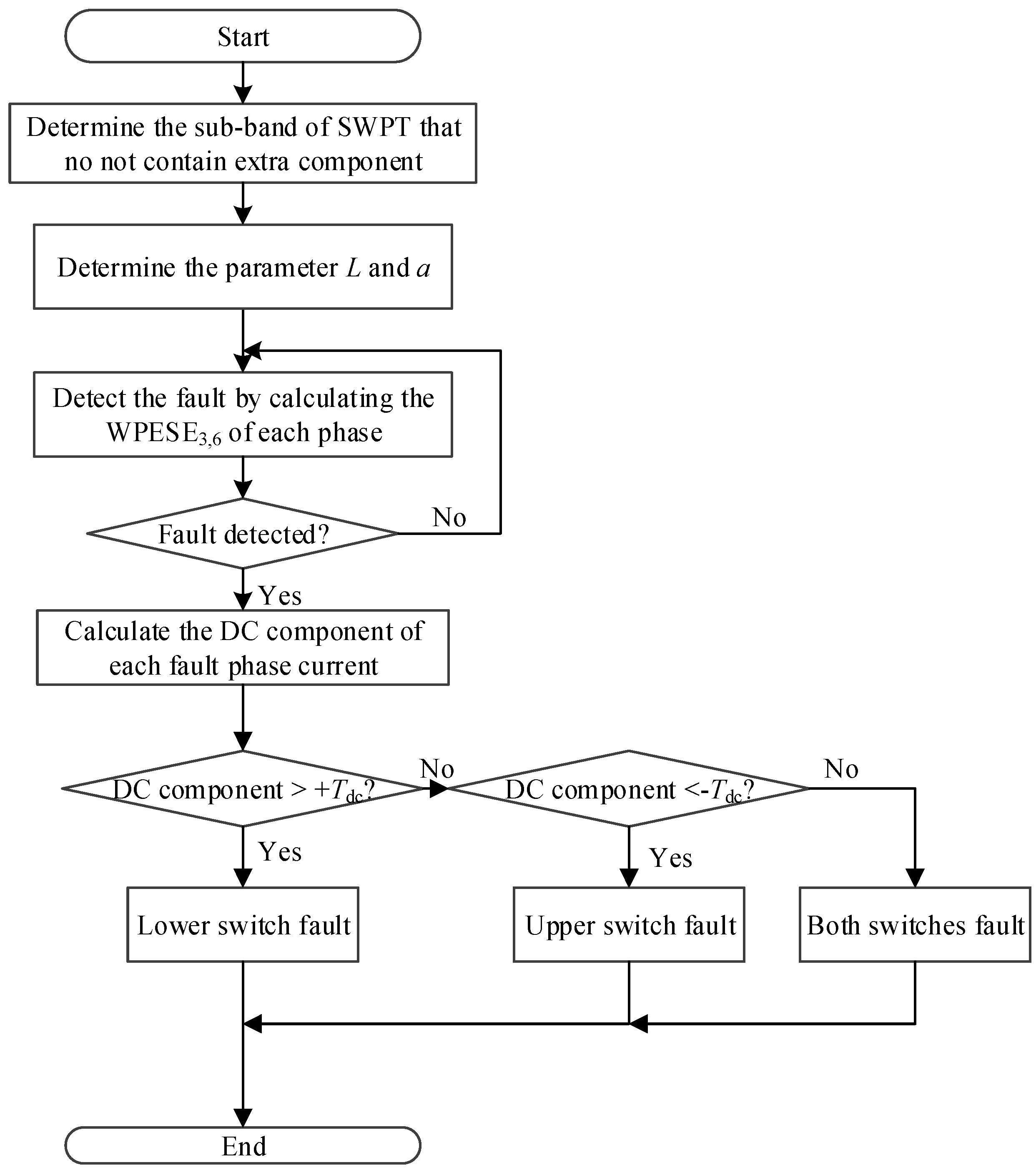
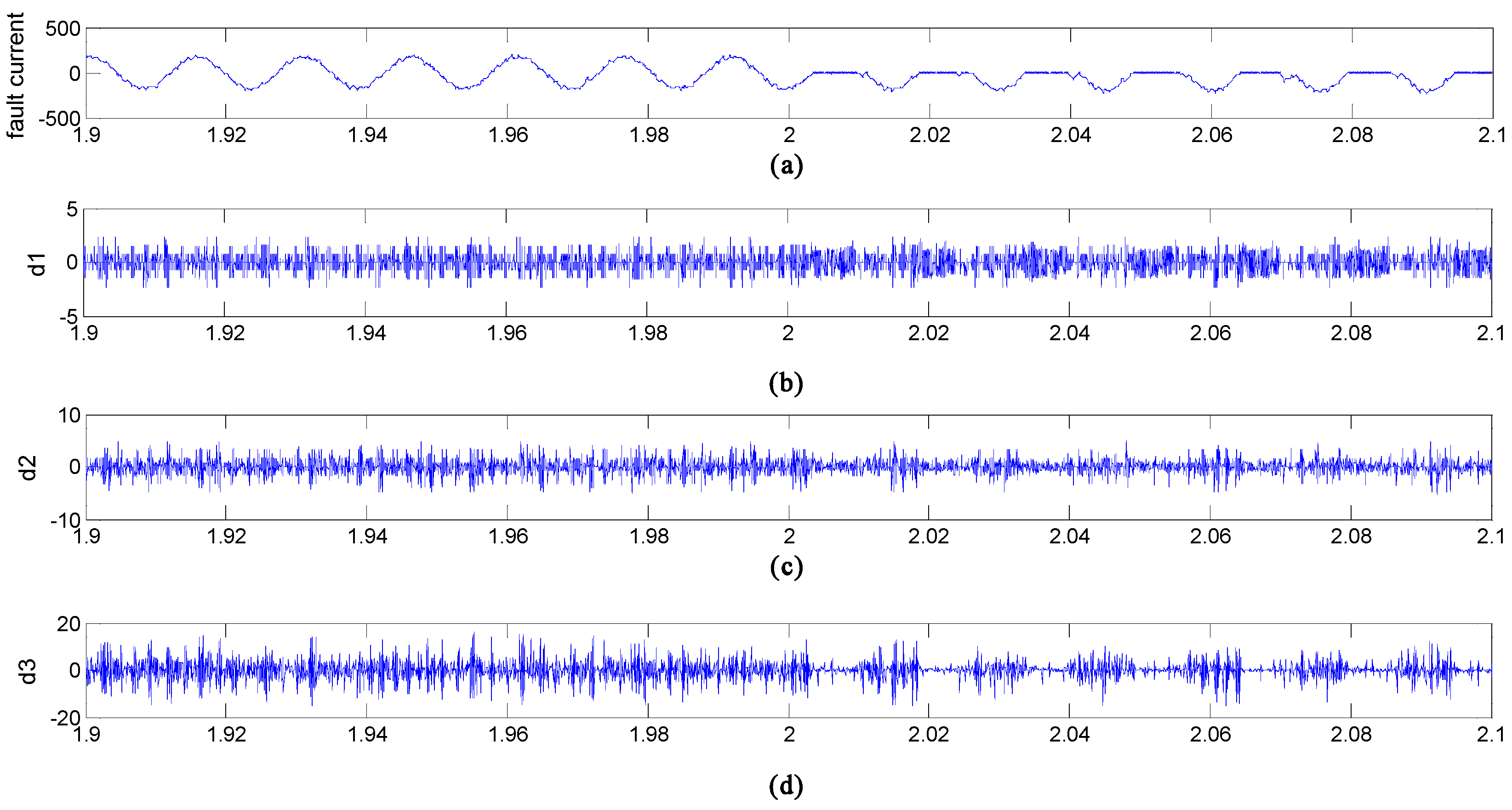
- (1)
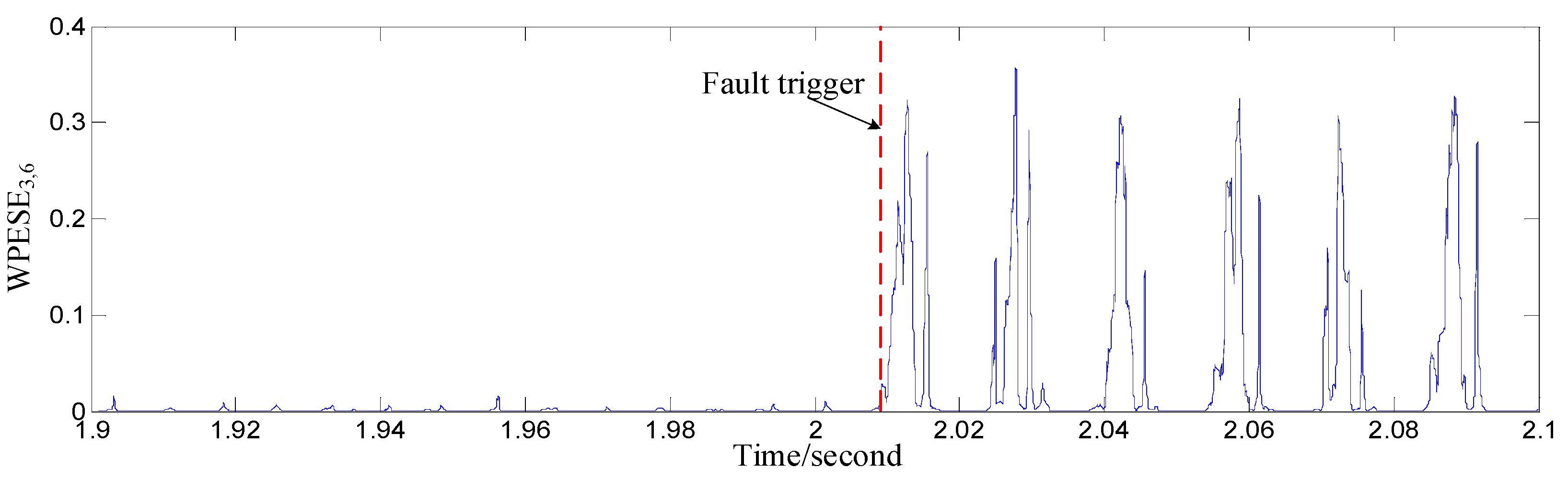
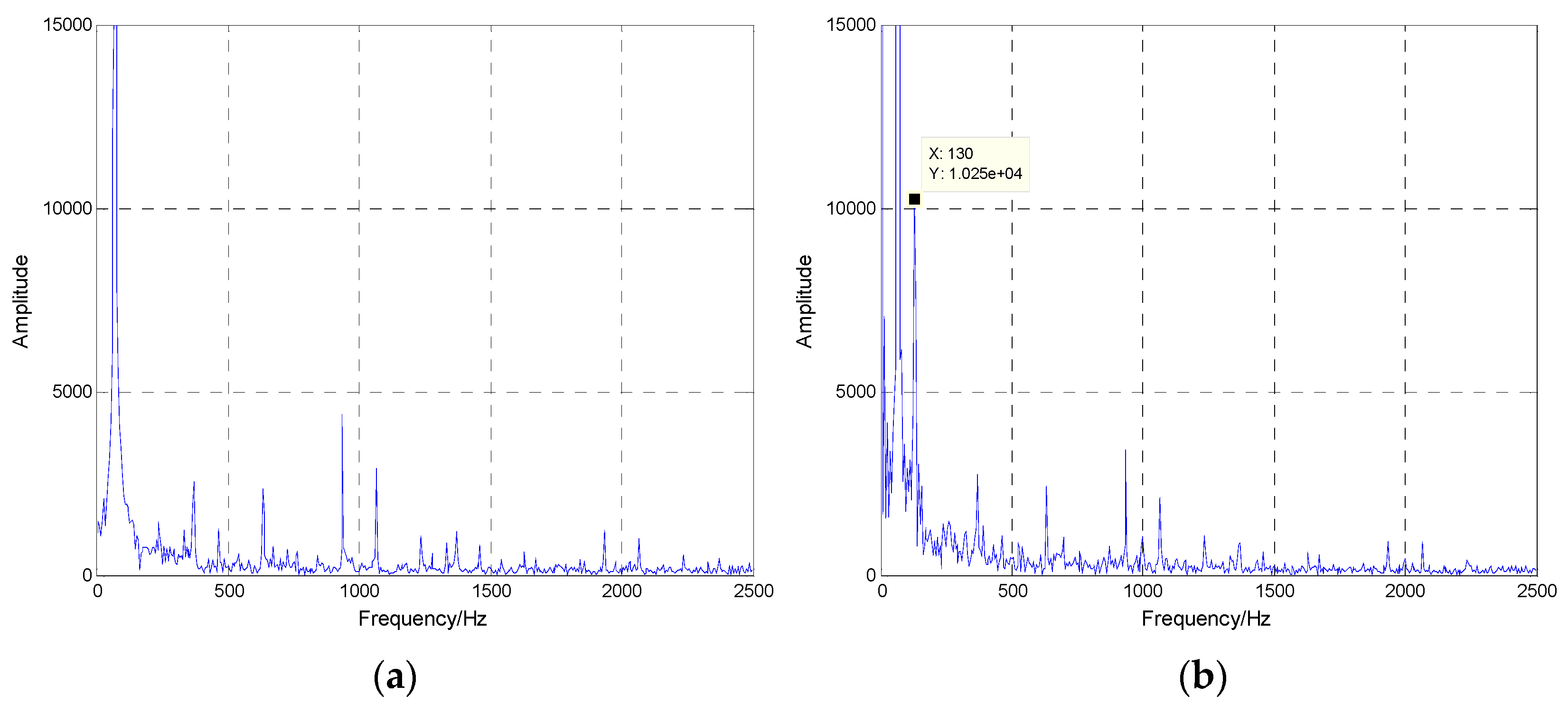
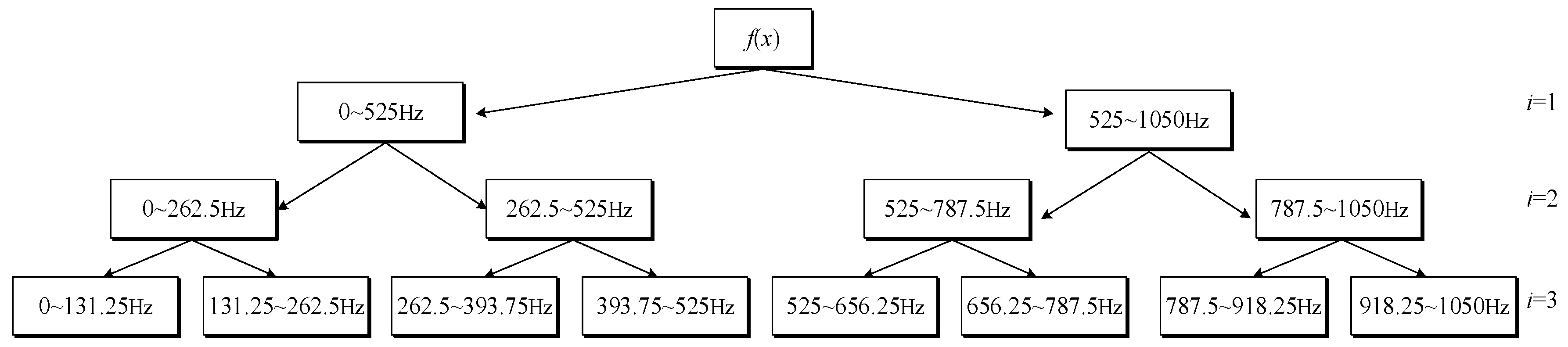
- Utilize the FFT to determine the extra components of the normal current and fault current. By analyzing the frequency of each sub-band of DWPT, the sub-band that do not contain the extra component is selected. In this case, the sixth node in the third level is selected.
- (2)
- The parameters such as the length of the sliding window L and the sliding factor a should be set.
- (3)
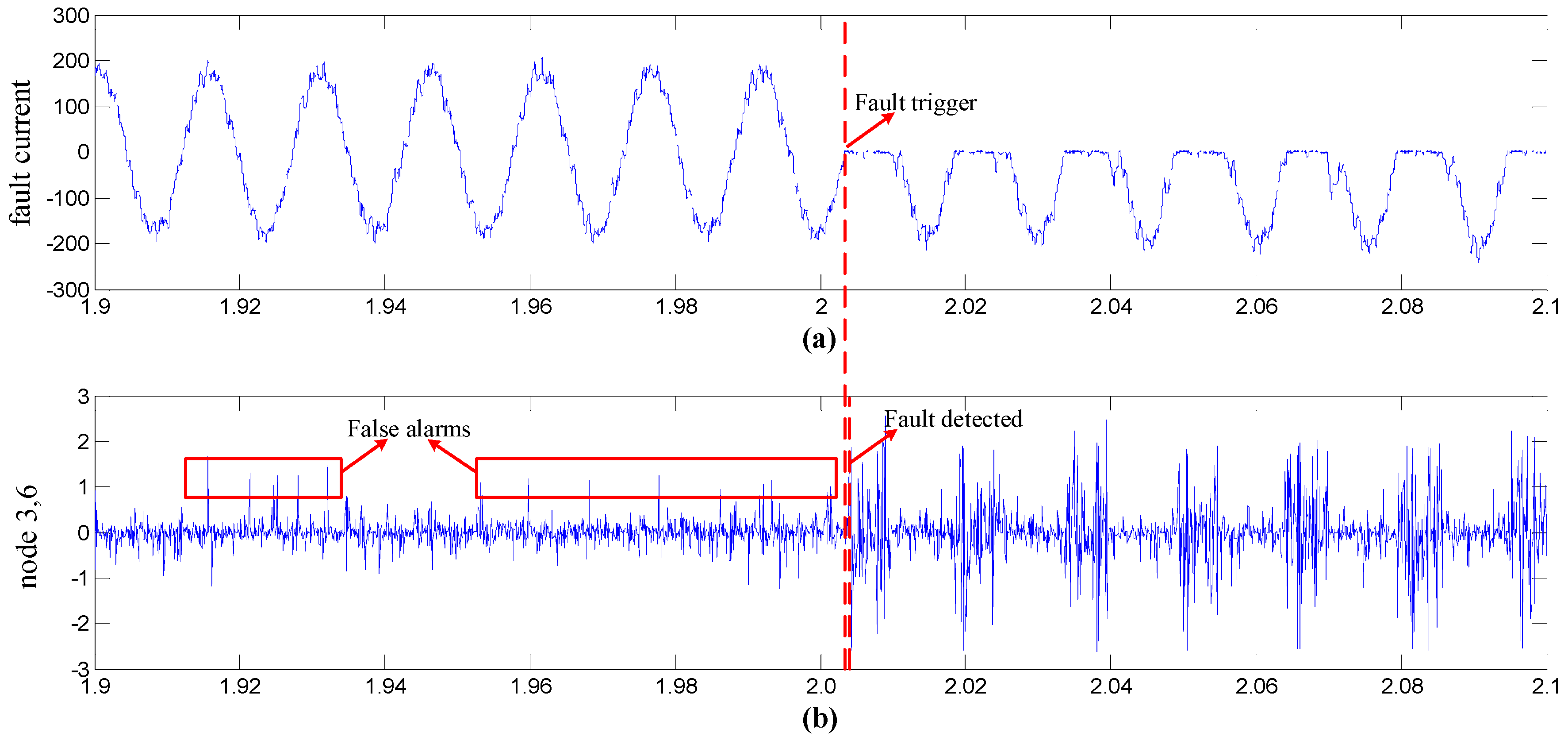
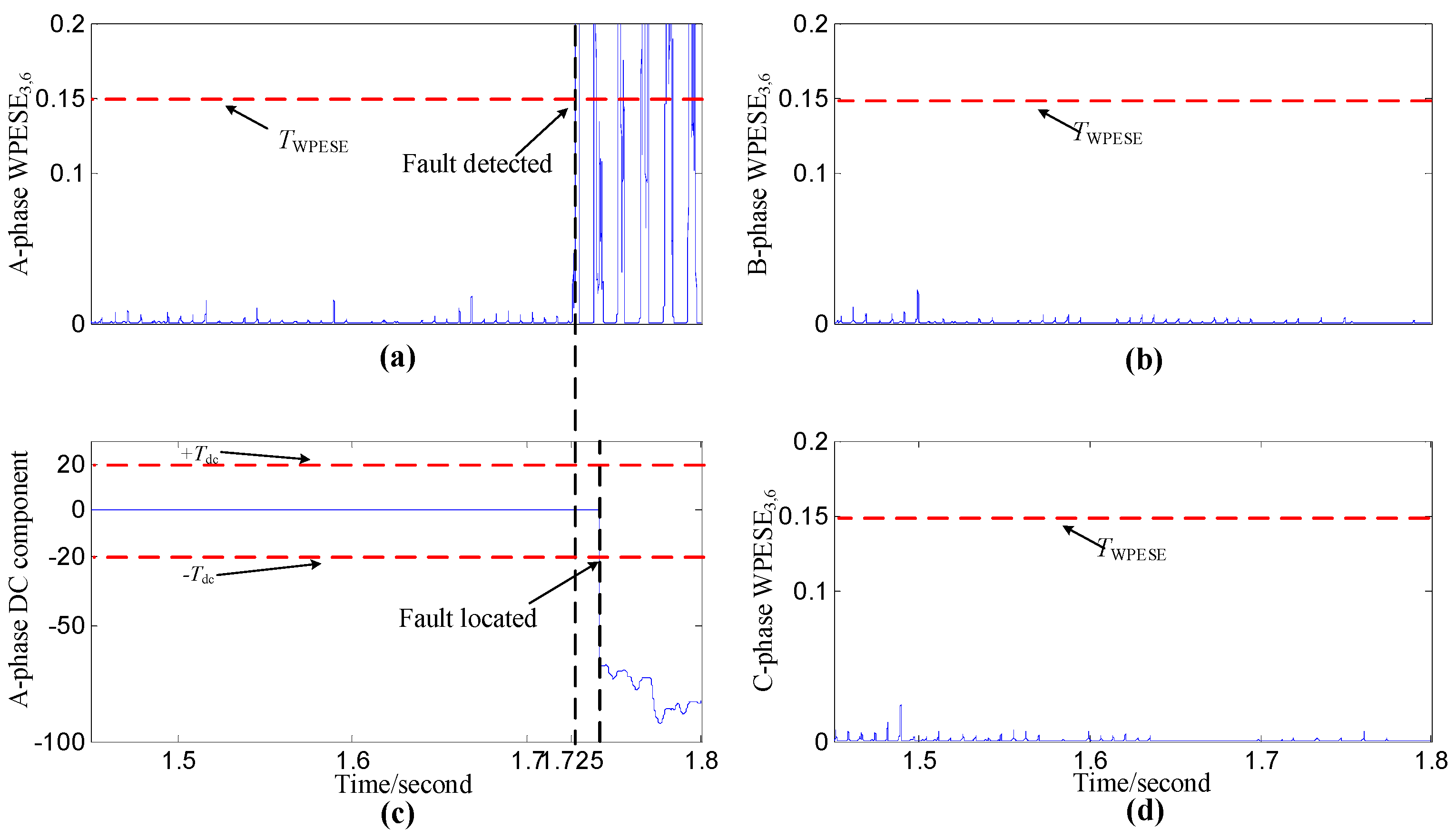
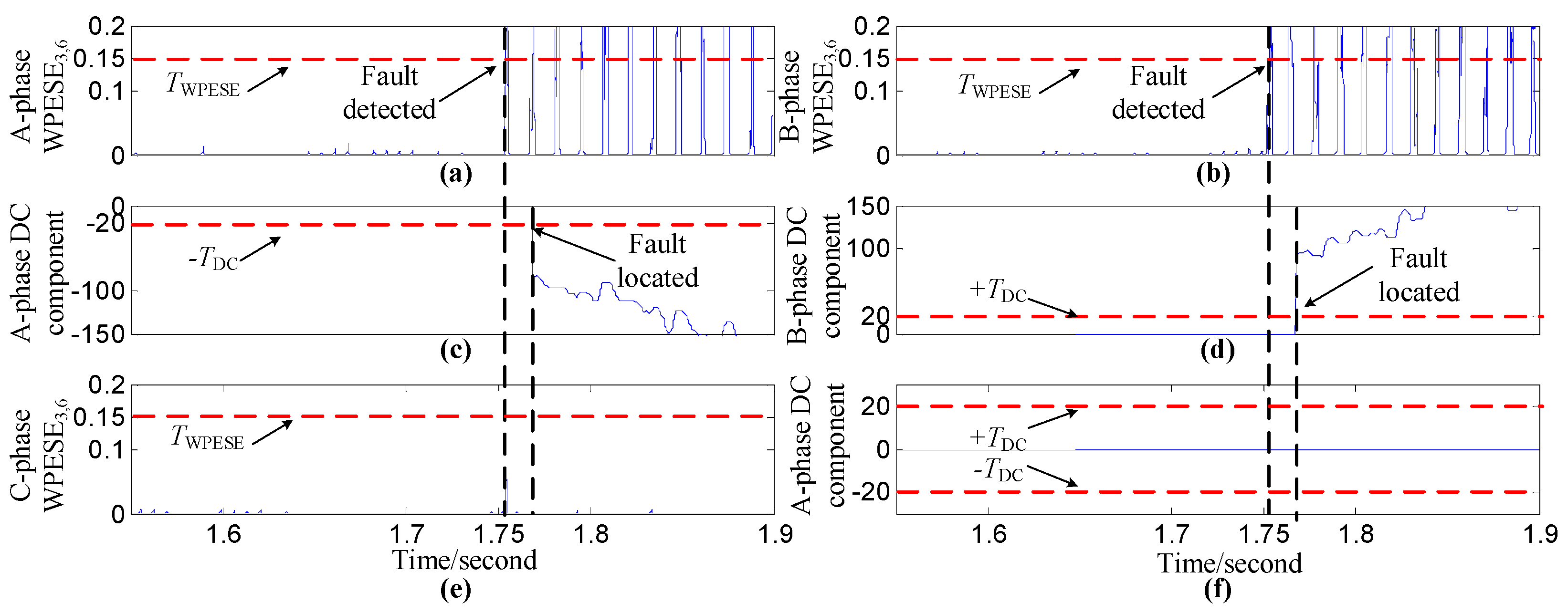
- The WPESE3,6 of each phase current in the sliding window should be calculated. If the WPESE3,6 exceeds the predefined threshold TWPEE, the corresponding leg is faulty.
- (4)
- If a leg is detected as faulty, DC component Idc of the corresponding phase current in the next cycle shold be calculated. If Idc is larger than +TDC, the LSF is isolated. If Idc is less than −TDC, the LSF is isolated. Otherwise, simultaneous USF and LSF are isolated.
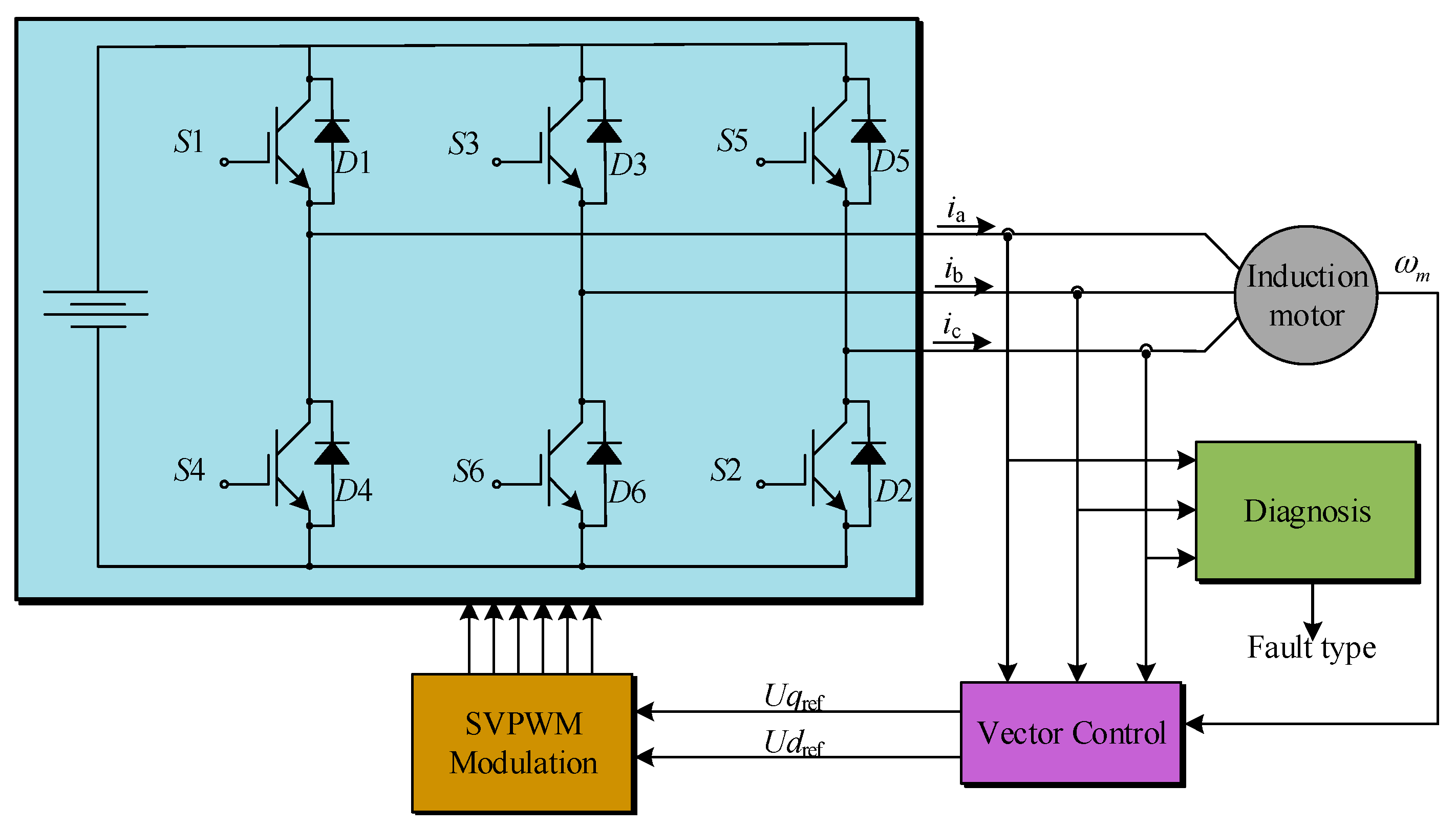
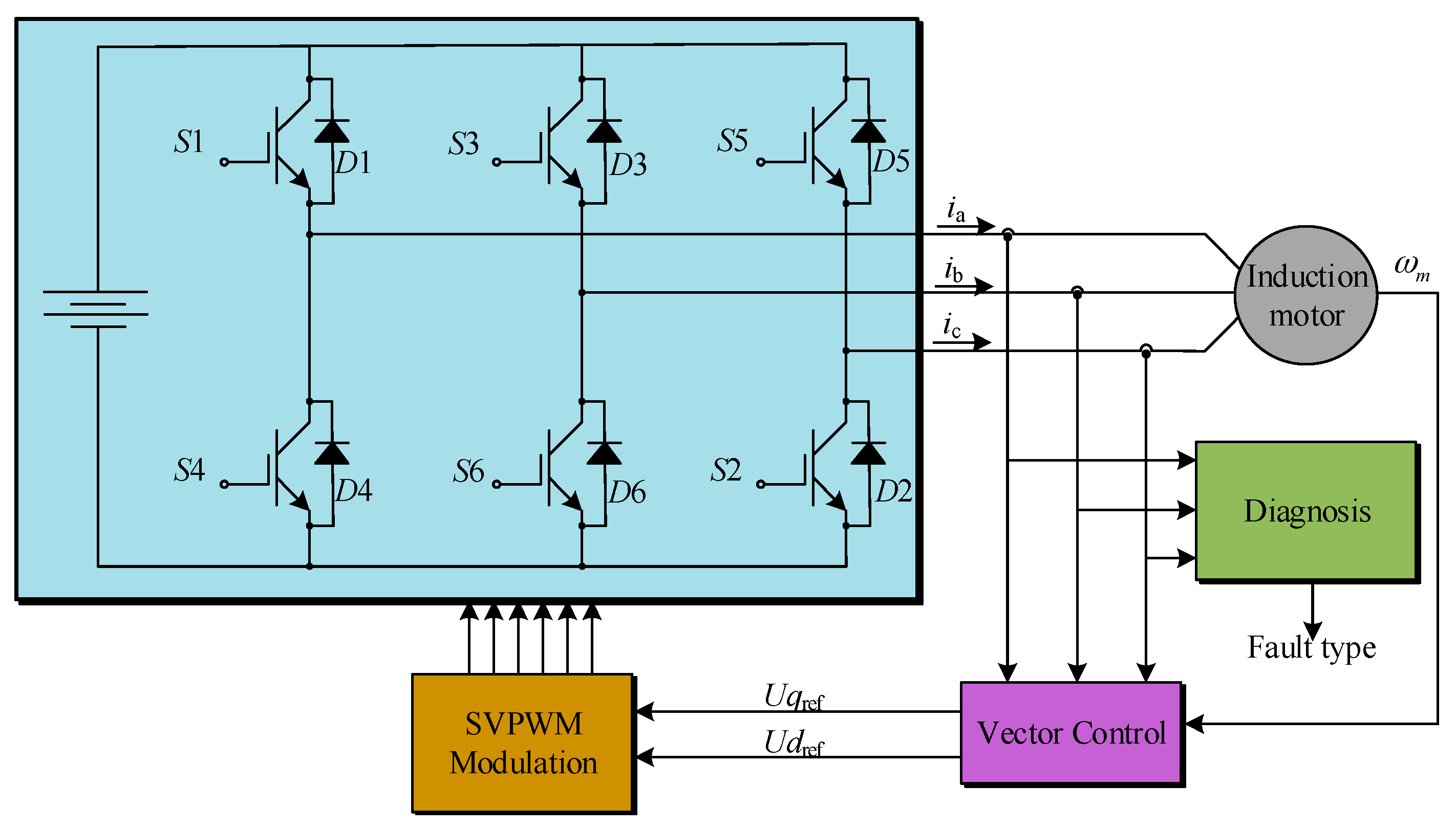
4. Simulation and Discussion
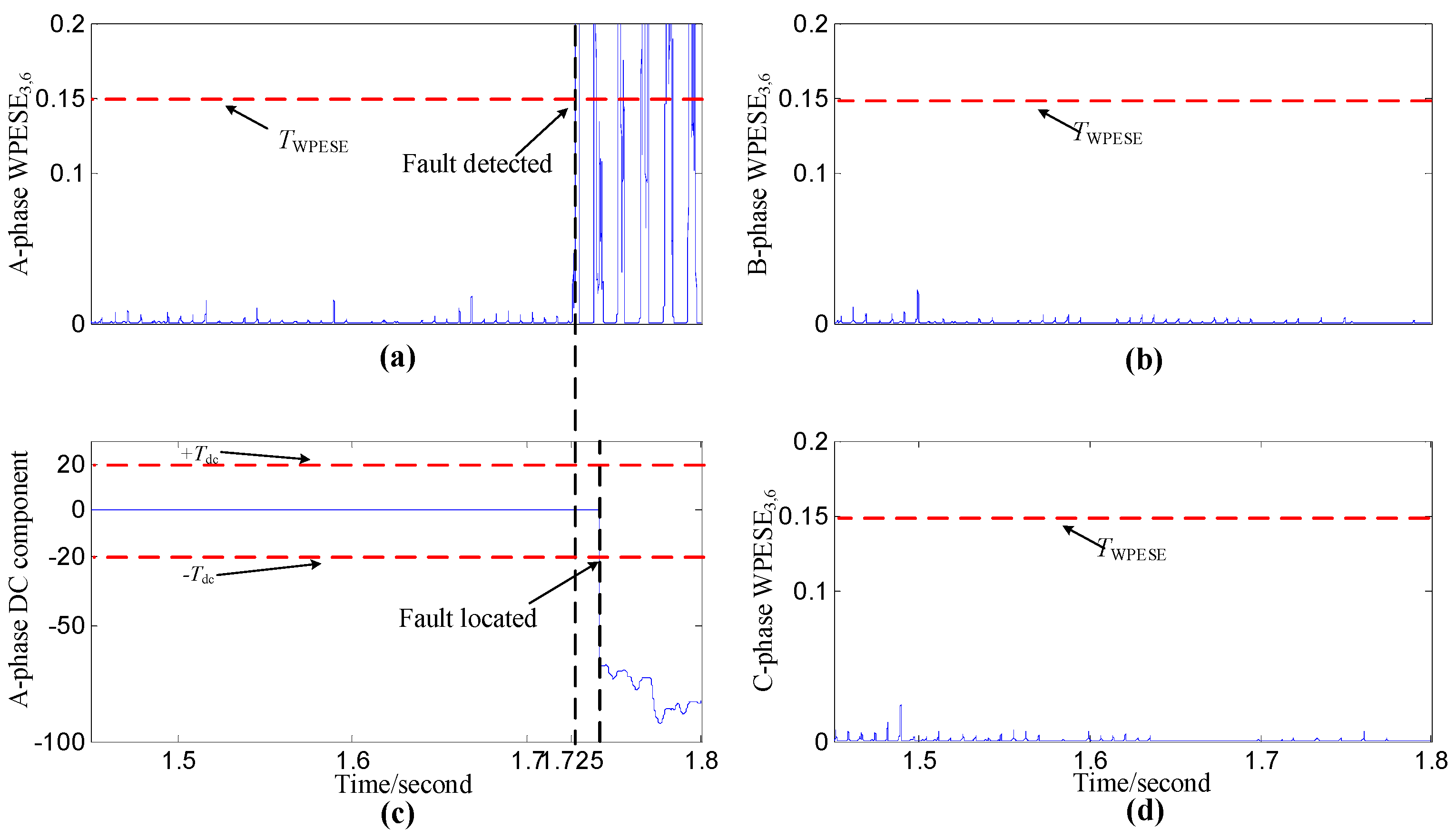
- Fault A:
- Just one open switch fault occurs at leg A on the upper IGBT(S1).
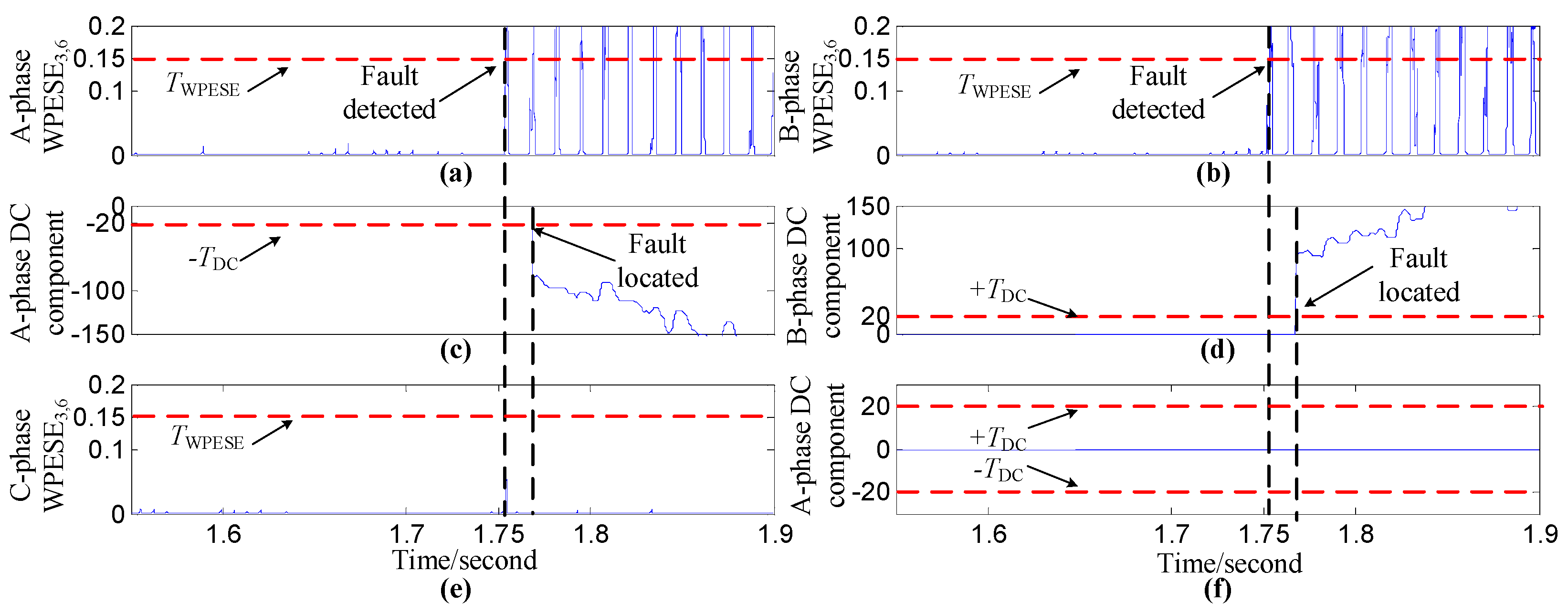
- Fault B:
- Two simultaneous open switch faults occur at leg A on the upper IGBT(S1) and at leg B on the lower IGBT(S6).
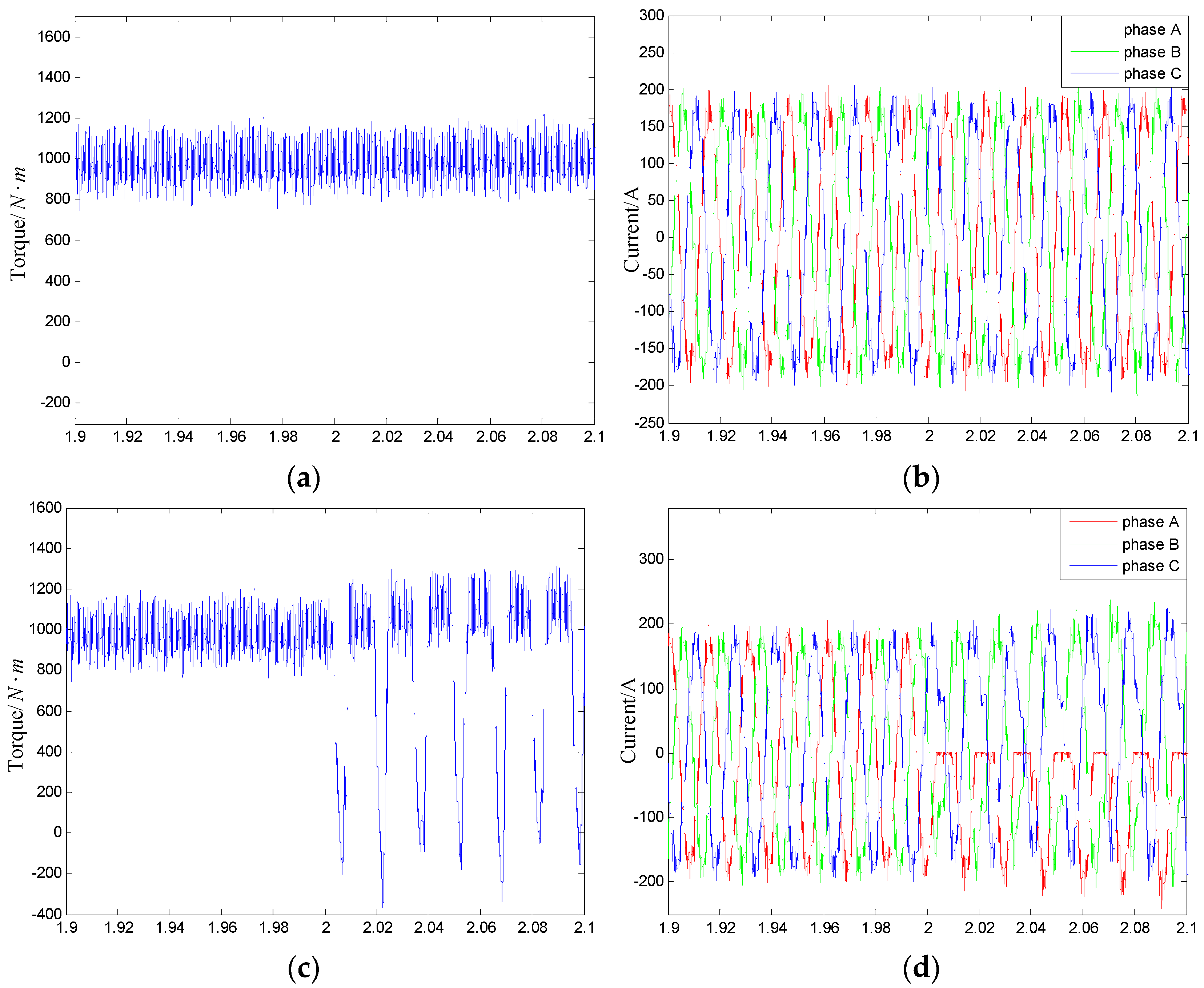
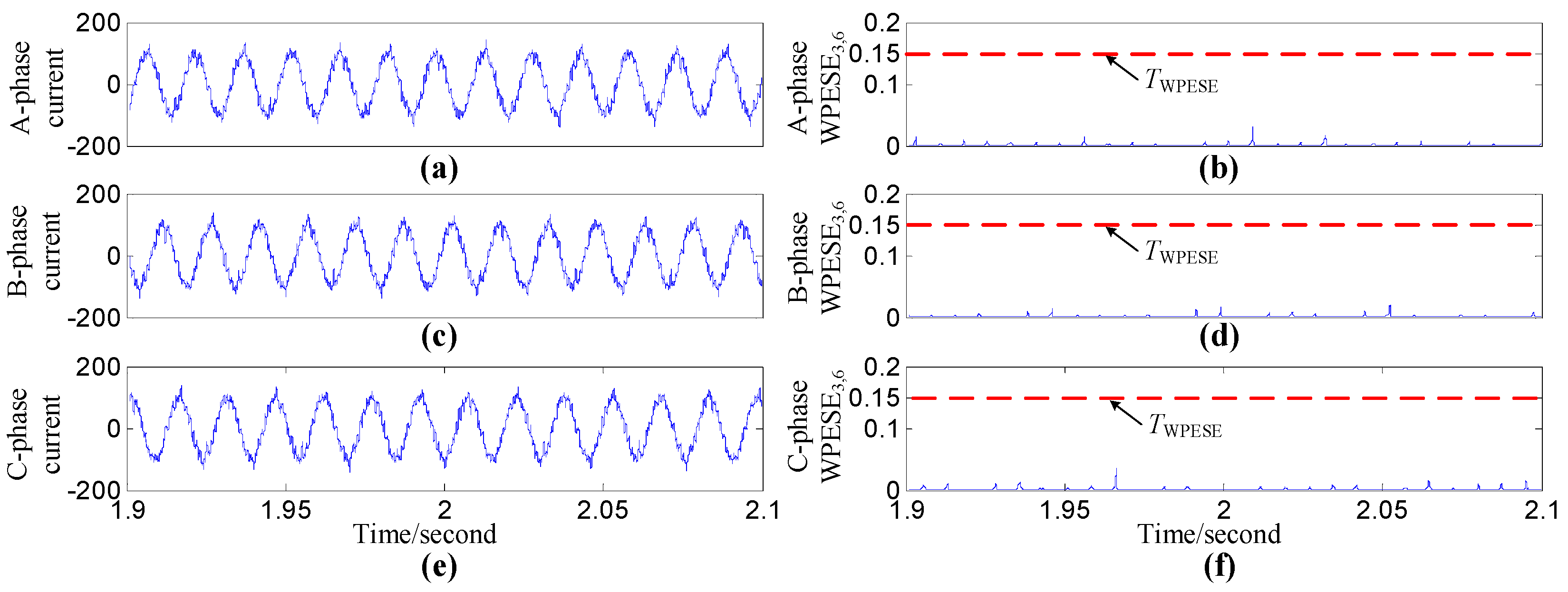
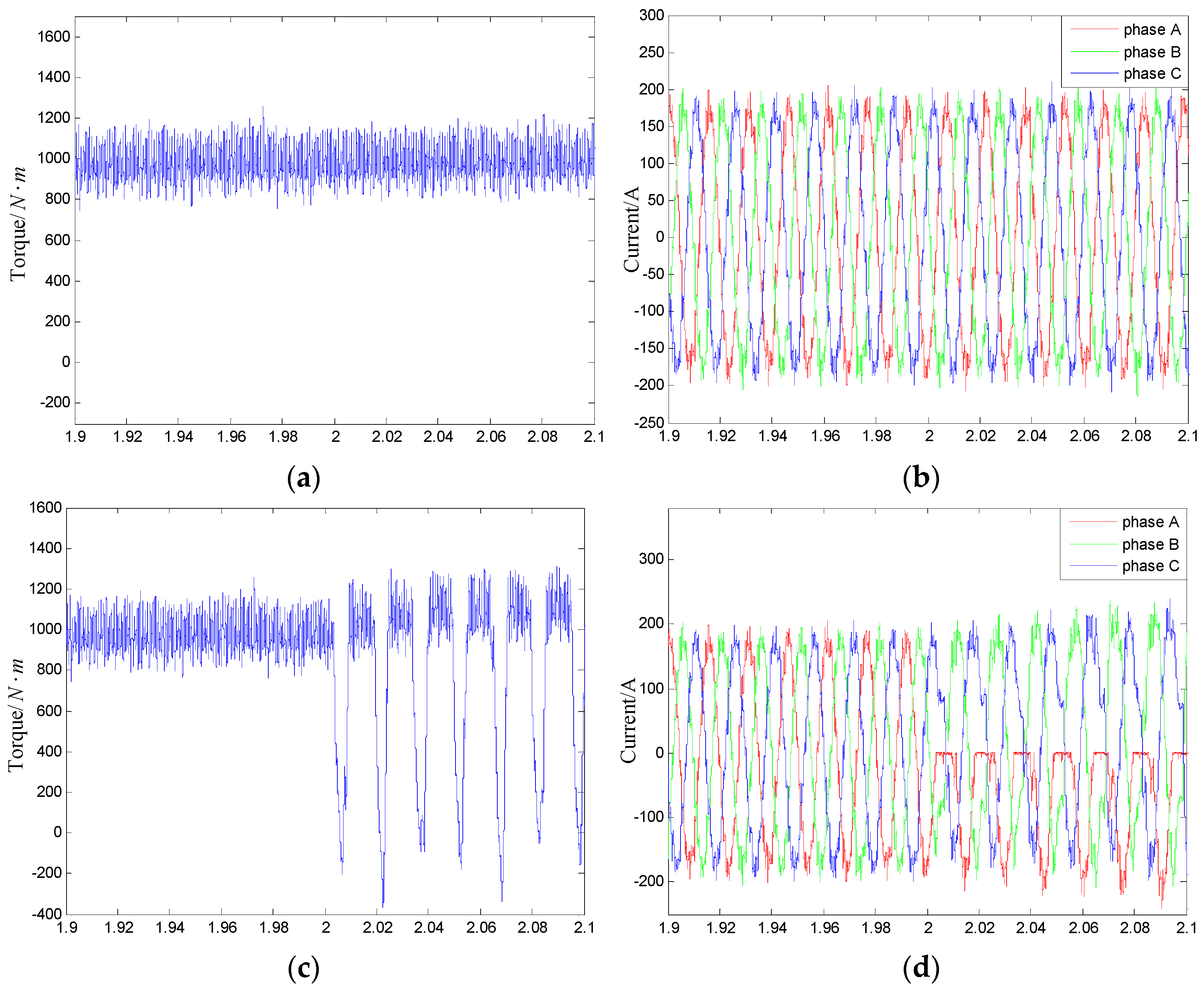
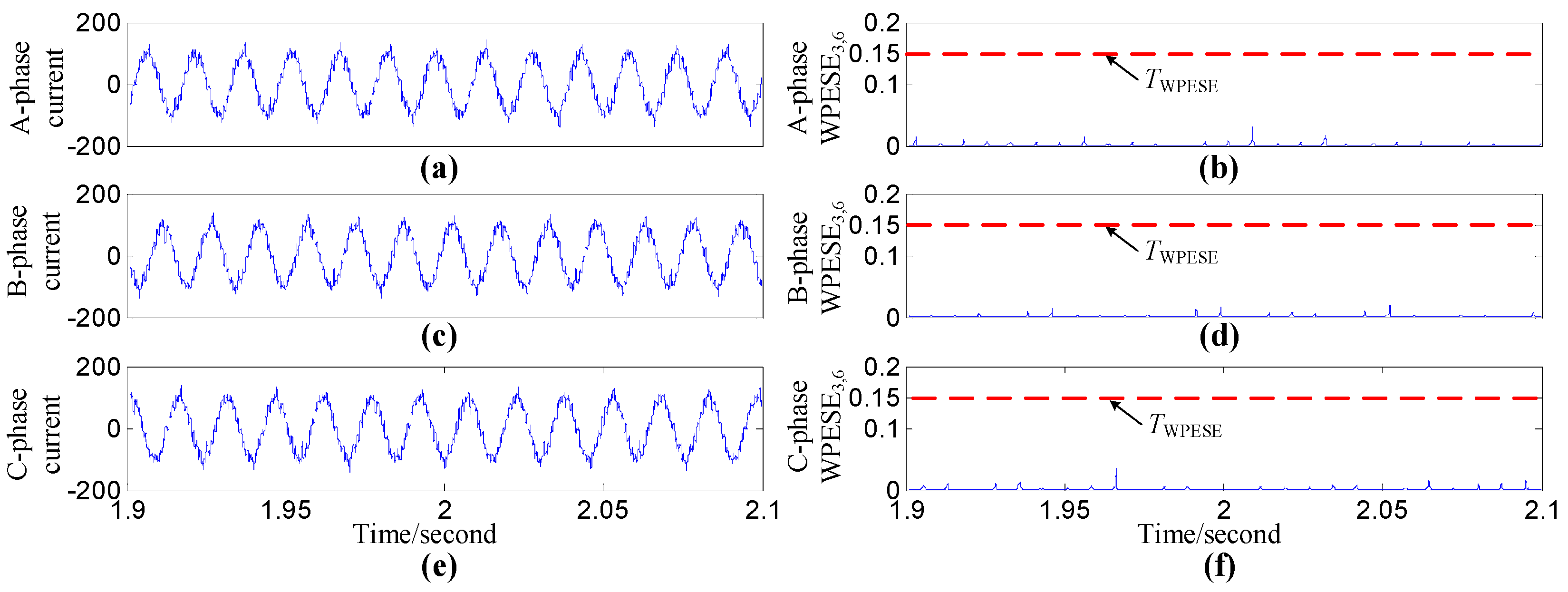
4.1. Fault-Free Case
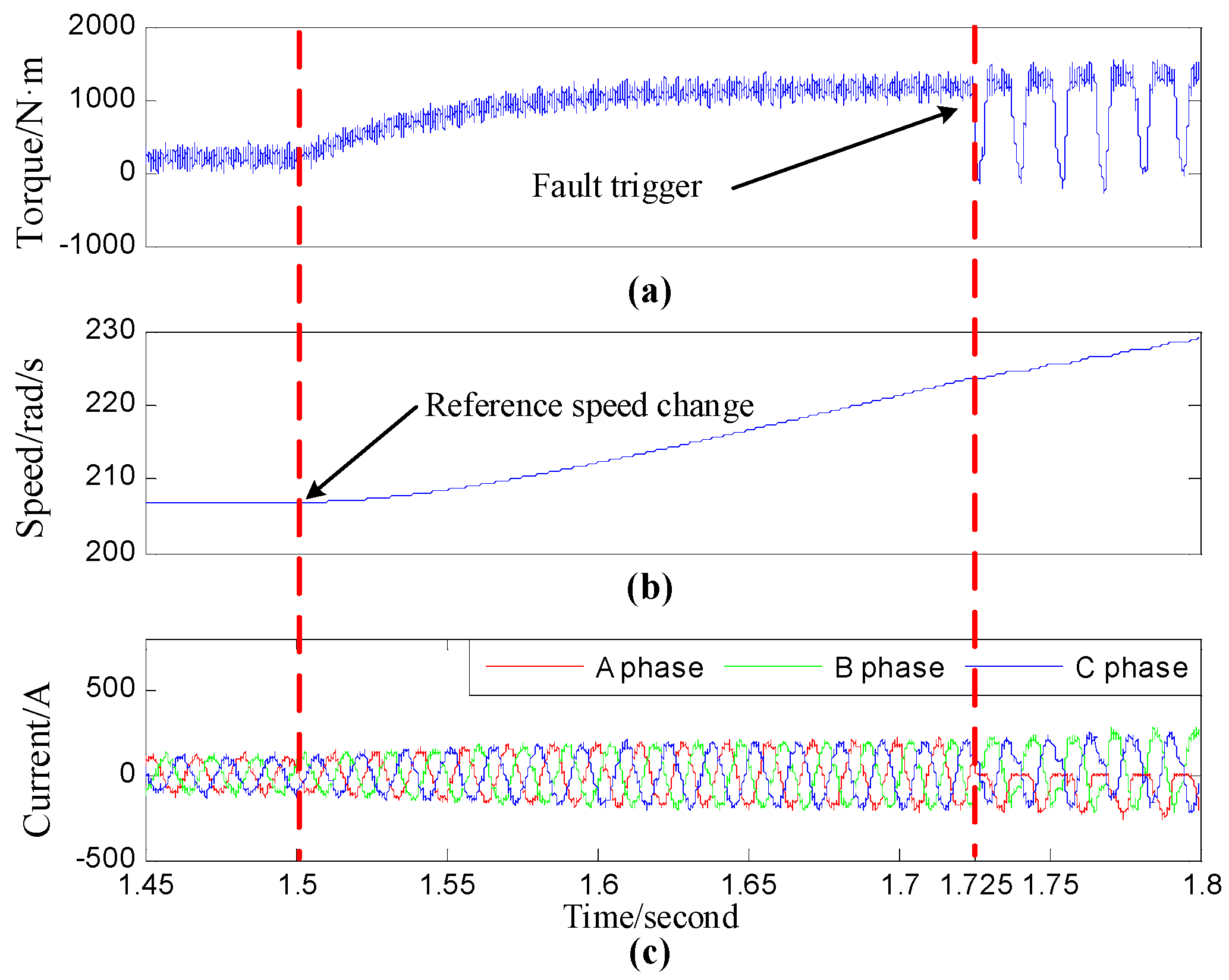
4.2. Fault A Case
4.3. Fault B Case
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| DWPT | Discrete Wavelet Packet Transform |
| DWT | Discrete Wavelet Transform |
| EMD | Empirical Mode Decomposition |
| EMDESE | Empirical Mode Decomposition Shannon Entropy |
| EMDETE | Empirical Mode Decomposition Tsallis Entropy |
| IGBT | Isolated Gate Bipolar Transistor |
| LSF | Lower Switch Fault |
| SPD | Semiconductor Power Devices |
| TDC | Threshold for the DC component |
| TWESE | Threshold for the WPESE3,6 |
| USF | Upper Switch Fault |
| WPETE | Wavelet Packet Energy Tsallis Entropy |
| WPESE | Wavelet Packet Energy Shannon Entropy |
| Evaluation parameter for different entropies |
References
- Smet, V.; Forest, F.; Huselstein, J.-J.; Richardeau, F.; Khatir, Z.; Lefebvre, S.; Berkani, M. Ageing and failure modes of IGBT modules in high-temperature power cycling. IEEE Trans. Ind. Electron. 2011, 58, 4931–4941. [Google Scholar] [CrossRef]
- Campos-Delgado, D.U.; Espinoza-Trejo, D.R.; Palacios, E. Fault-tolerant control in variable speed drives: A survey. IET Electr. Power Appl. 2008, 2, 121–134. [Google Scholar] [CrossRef]
- Mirafzal, B. Survey of Fault-Tolerance Techniques for Three-Phase Voltage Source Inverters. IEEE Trans. Ind. Electron. 2014, 61, 5192–5202. [Google Scholar] [CrossRef]
- Yang, S.; Bryant, A.; Mawby, P.; Xiang, D.; Ran, L.; Tavner, P. An industry-based survey of reliability in power electronic converters. IEEE Trans. Ind. Appl. 2011, 47, 1441–1451. [Google Scholar] [CrossRef]
- Lu, B.; Sharma, S.K. A literature review of IGBT fault diagnostic and protection methods for power inverters. IEEE Trans. Ind. Appl. 2009, 45, 1770–1777. [Google Scholar]
- An, Q.T.; Sun, L.Z.; Zhao, K.; Sun, L. Switching function model-based fast-diagnostic method of open-switch faults in inverters without sensors. IEEE Trans. Power Electron. 2011, 26, 119–126. [Google Scholar] [CrossRef]
- Campos-Delgado, D.U.; Espinoza-Trejo, D.R. An observer-based diagnosis scheme for single and simultaneous open-switch faults in induction motor drives. IEEE Trans. Ind. Electron. 2011, 58, 671–679. [Google Scholar] [CrossRef]
- Freire, N.M.; Estima, J.O.; Cardoso, A.J.M. A voltage-based approach without extra hardware for open-circuit fault diagnosis in closed-loop PWM AC regenerative drives. IEEE Trans. Ind. Electron. 2014, 61, 4960–4970. [Google Scholar] [CrossRef]
- Salehifar, M.; Salehi Arashloo, R.; Moreno-Eguilaz, M.; Sala, V.; Romeral, L. Observer-based open transistor fault diagnosis and fault-tolerant control of five-phase permanent magnet motor drive for application in electric vehicles. IET Power Electron. 2014, 8, 76–87. [Google Scholar] [CrossRef]
- Estima, J.O.; Marques Cardoso, A.J. A new algorithm for real-time multiple open-circuit fault diagnosis in voltage-fed PWM motor drives by the reference current errors. IEEE Trans. Ind. Electron. 2013, 60, 3496–3505. [Google Scholar] [CrossRef]
- Estima, J.O.; Cardoso, A.J.M. A new approach for real-time multiple open-circuit fault diagnosis in voltage-source inverters. IEEE Trans. Ind. Appl. 2011, 47, 2487–2494. [Google Scholar] [CrossRef]
- Choi, U.M.; Jeong, H.G.; Lee, K.B.; Blaabjerg, F. Method for detecting an open-switch fault in a grid-connected NPC inverter system. IEEE Trans. Power Electron. 2012, 27, 2726–2739. [Google Scholar] [CrossRef]
- Choi, J.-H.; Kim, S.; Yoo, D.S.; Kim, K.-H. A Diagnostic Method of Simultaneous Open-Switch Faults in Inverter-fed Linear Induction Motor Drive for Reliability Enhancement. IEEE Trans. Ind. Electron. 2014, 62, 4065–4077. [Google Scholar] [CrossRef]
- Khanniche, M.S.; Mamat-Ibrahim, M.R. Wavelet-fuzzy-based algorithm for condition monitoring of voltage source inverter. Electron. Lett. 2004, 40, 267–268. [Google Scholar] [CrossRef]
- Keswani, R.A.; Suryawanshi, H.M.; Ballal, M.S. Multi-resolution analysis for converter switch faults identification. IET Power Electron. 2015, 8, 783–792. [Google Scholar] [CrossRef]
- Aktas, M.; Turkmenoglu, V. Wavelet-based switching faults detection in direct torque control induction motor drives. IET Sci. Meas. Technol. 2010, 4, 303–310. [Google Scholar] [CrossRef]
- Dong, E.K.; Dong, C.L. Fault diagnosis of three-phase PWM inverters using wavelet and SVM. J. Power Electron. 2009, 9, 377–385. [Google Scholar]
- Cui, J. Faults Classification of Power Electronic Circuits Based on a Support Vector Data Description Method. Metrol. Meas. Syst. 2015, 22, 205–220. [Google Scholar] [CrossRef]
- Hu, Z.K.; Gui, W.H.; Yang, C.H.; Deng, P.C.; Ding, S.X. Fault classification method for inverter based on hybrid support vector machines and wavelet analysis. Int. J. Control Autom. Syst. 2011, 9, 797–804. [Google Scholar] [CrossRef]
- Liu, Z.G.; Han, Z.W.; Zhang, Y. Multiwavelet packet entropy and its application in transmission line fault recognition and classification. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 2043–2052. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.G.; Cui, Y.; Li, W.H. Complex power quality disturbances recognition using wavelet packet entropies and S-transform. Entropy 2015, 17, 5811–5828. [Google Scholar] [CrossRef]
- Dubey, R.; Samantaray, S.R. Wavelet singular entropy-based symmetrical fault-detection and out-of-step protection during power swing. IET Gener. Transm. Distrib. 2013, 7, 1123–1134. [Google Scholar] [CrossRef]
- Yang, Q.; Wang, J. Multi-Level Wavelet Shannon Entropy-Based Method for Single-Sensor Fault Location. Entropy 2015, 17, 7101–7117. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2009, 23, 1327–1338. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Yu, Y.; Junsheng, C. A roller bearing fault diagnosis method based on EMD energy entropy and ANN. J. Sound Vib. 2006, 294, 269–277. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Band | Frequency Range |
|---|---|
| D1 | [525,1050] Hz |
| D2 | [262.5,525] Hz |
| D3 | [131.25,262.5] Hz |
| Entropy Form | Evaluation Parameter |
|---|---|
| WPESE | 0.21 |
| WPETE0.9 | 0.7724 |
| WPESE3,6 | 3.124 |
| EMDESE | 0.498 |
| EMDETE0.5 | 0.66 |
| Parameter | Value |
|---|---|
| Stator resistance/Rs | 0.15 |
| Stator inductance/Ls | 0.00142 H |
| Rotator resistance/Rr | 0.16 |
| Rotator inductance/Lr | 0.006 H |
| Mutual inductance/Lm | 0.0254 H |
| Inertia/J | 10 kg·m2 |
| Nominal line voltage | 2700 V |
| Nominal frequency | 138 Hz |
| Pole pairs | 2 |
| Nominal power | 562 kVA |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, K.; Liu, Z.; Lin, S. Wavelet Entropy-Based Traction Inverter Open Switch Fault Diagnosis in High-Speed Railways. Entropy 2016, 18, 78. https://doi.org/10.3390/e18030078
Hu K, Liu Z, Lin S. Wavelet Entropy-Based Traction Inverter Open Switch Fault Diagnosis in High-Speed Railways. Entropy. 2016; 18(3):78. https://doi.org/10.3390/e18030078
Chicago/Turabian StyleHu, Keting, Zhigang Liu, and Shuangshuang Lin. 2016. "Wavelet Entropy-Based Traction Inverter Open Switch Fault Diagnosis in High-Speed Railways" Entropy 18, no. 3: 78. https://doi.org/10.3390/e18030078
APA StyleHu, K., Liu, Z., & Lin, S. (2016). Wavelet Entropy-Based Traction Inverter Open Switch Fault Diagnosis in High-Speed Railways. Entropy, 18(3), 78. https://doi.org/10.3390/e18030078