Application of Torque Transducer and Rotary Encoder in a Hardware-in-the-Loop Wind Turbine Emulation †



Abstract
:1. Introduction
2. Aerodynamic Model
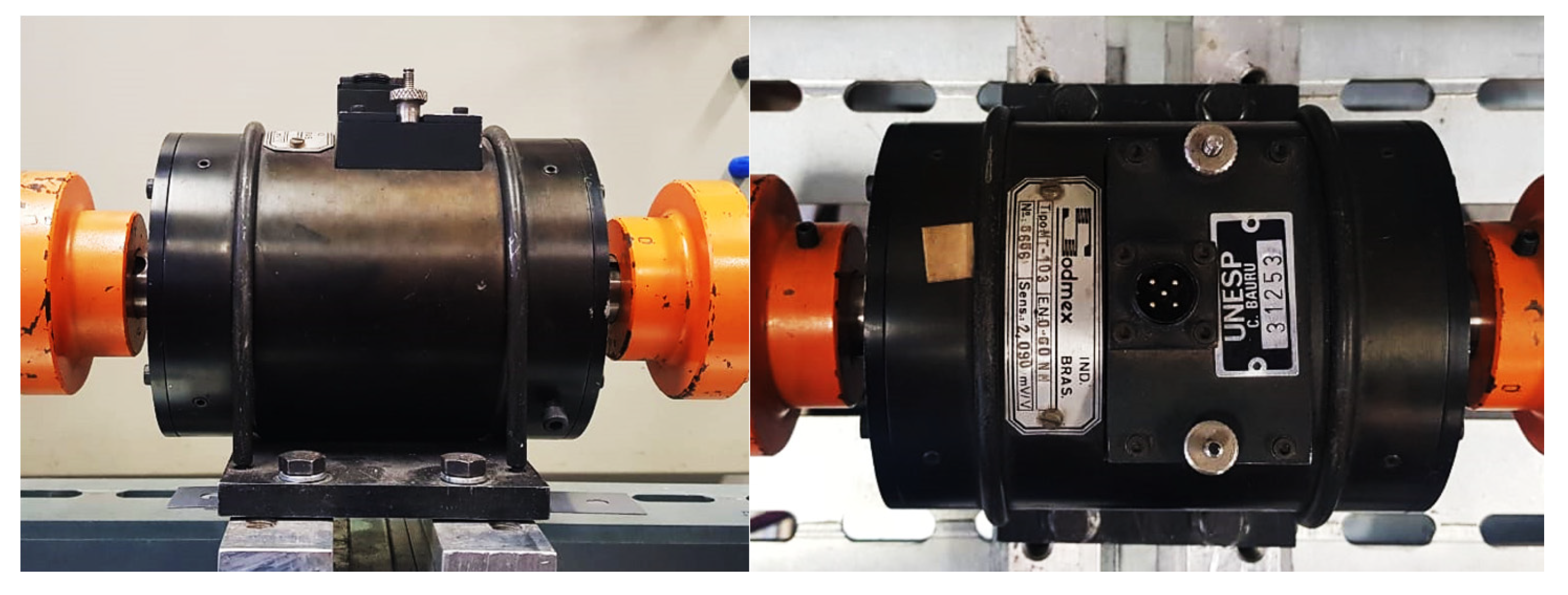
3. Torque Transducer
4. Rotary Encoder
5. Materials and Methods
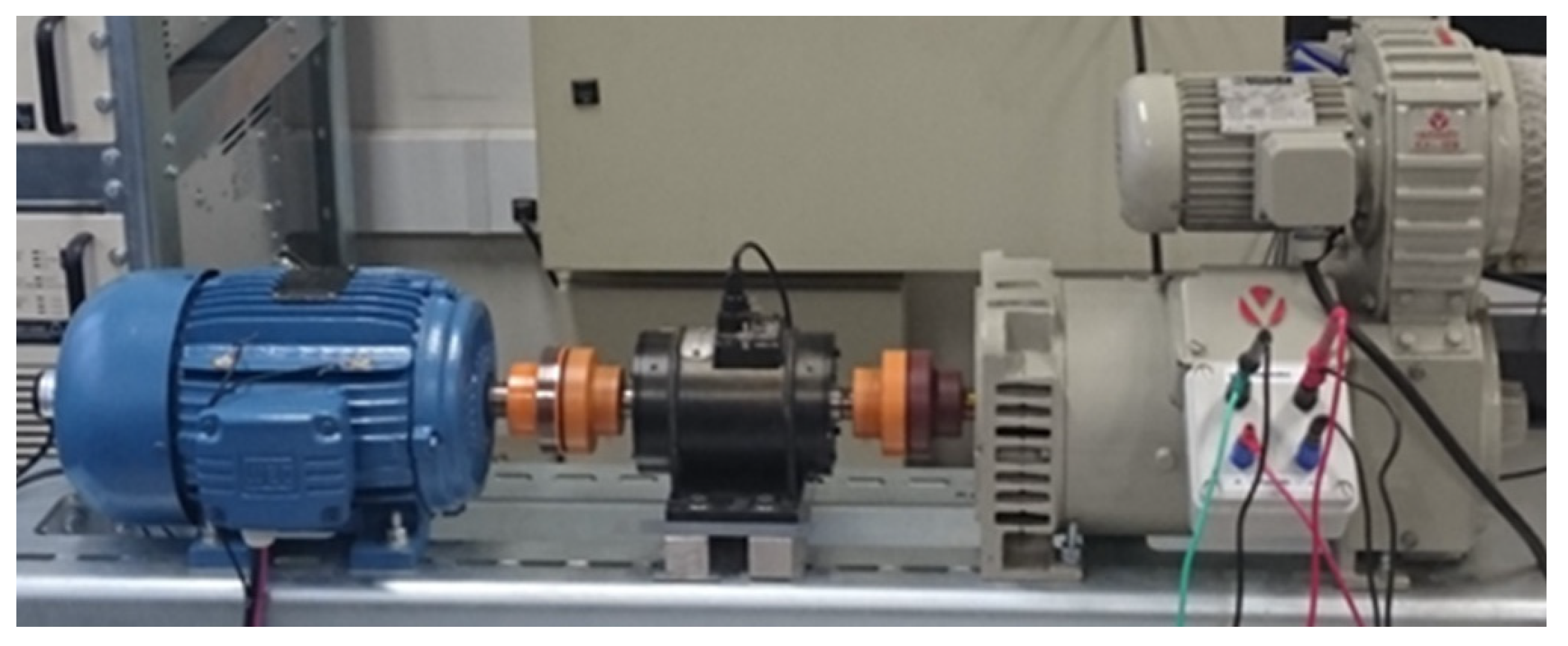
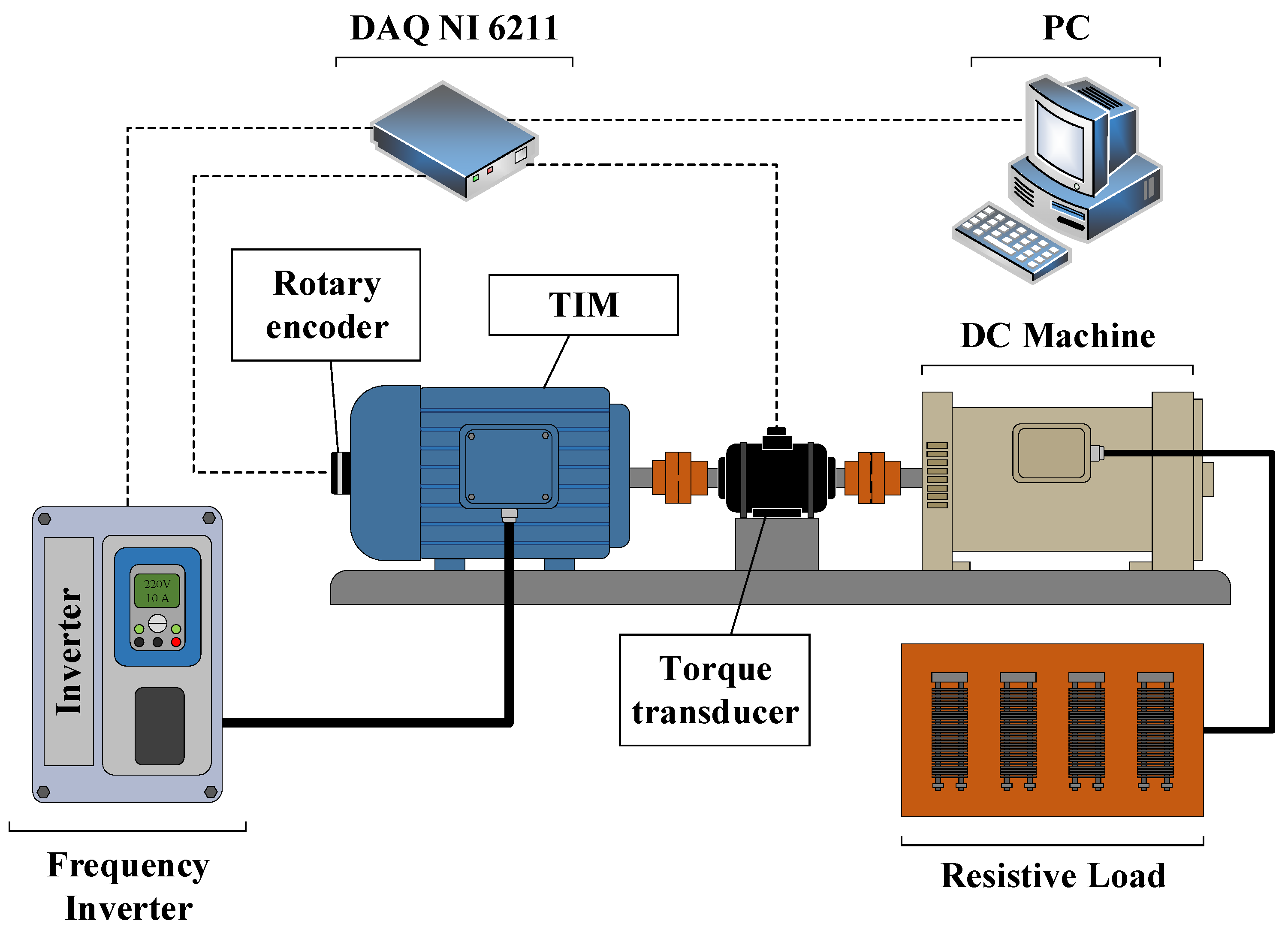
5.1. Test Bench Setup
5.2. Sensors and Acquisition Board
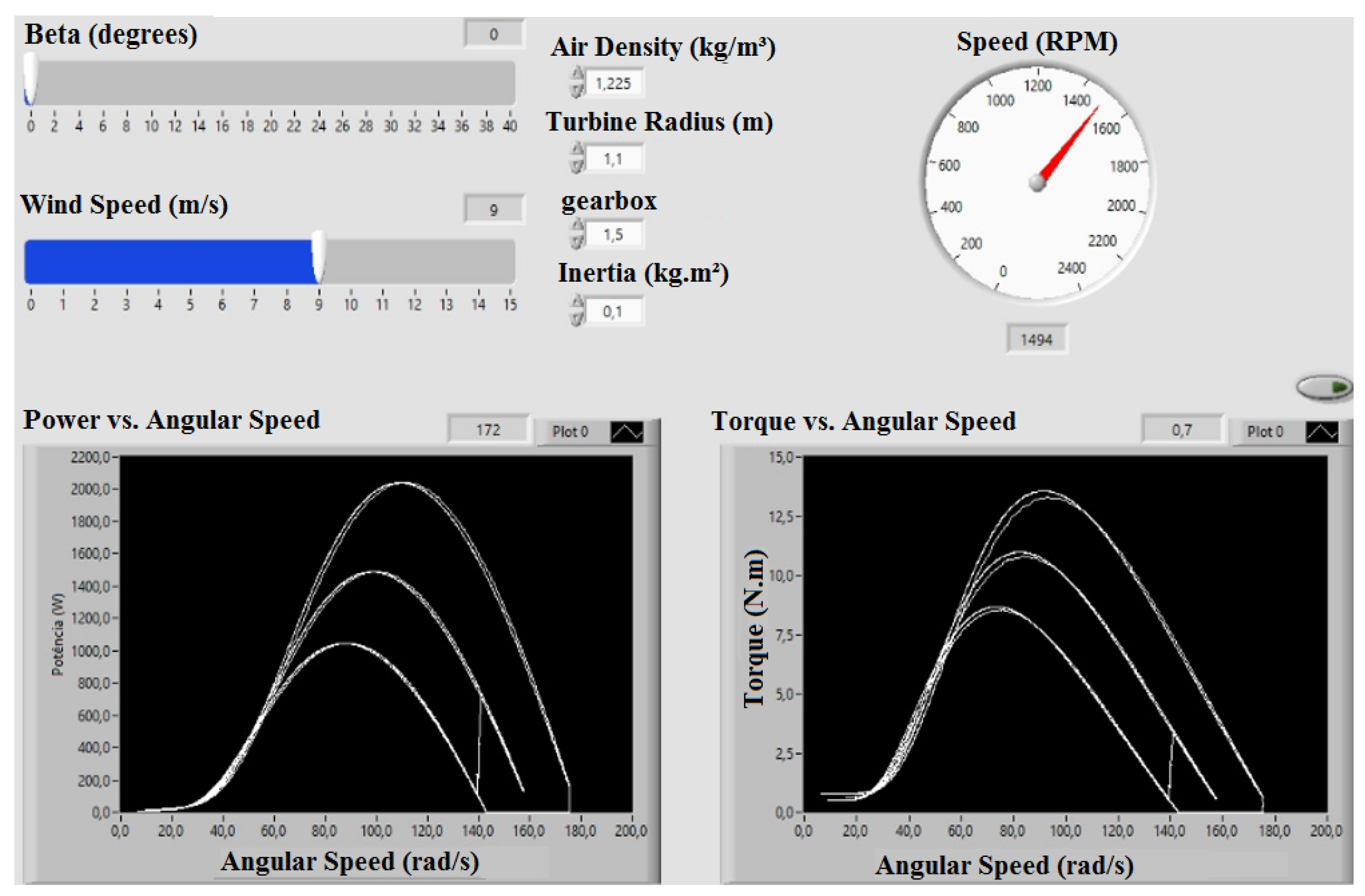
6. Results
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Moussa, I.; Bouallegue, A.; Khedher, A. New wind turbine emulator based on DC machine: Hardware implementation using FPGA board for an open-loop operation. IET Circuits Devices Syst. 2019, 13, 896–902. [Google Scholar] [CrossRef]
- Gan, L.K.; Shek, J.K.H.; Mueller, M.A. Modeling and Characterization of Downwind Tower Shadow Effects Using a Wind Turbine Emulator. IEEE Trans. Ind. Electron. 2017, 64, 7087–7097. [Google Scholar] [CrossRef]
- Averous, N.R.; Stieneker, M.; Kock, S.; Andrei, C.; Helmedag, A.; De Doncker, R.W.; Hameyer, K.; Jacobs, G.; Monti, A. Development of a 4 MW Full-Size Wind-Turbine Test Bench. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 600–609. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Lumbreras, C.; Reigosa, D.D.; Garcia, P.; Briz, F. Control and Emulation of Small Wind Turbines Using Torque Estimators. IEEE Trans. Ind. Appl. 2017, 53, 4863–4876. [Google Scholar] [CrossRef]
- Sirouni, Y.; Hani, S.E.; Naseri, N.; Aghmadi, A.; Harouri, K.E. Design and Control of a Small Scale Wind Turbine Emulator with a DC Motor. In Proceedings of the 2018 6th International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018; pp. 1–6. [Google Scholar]
- Nambiar, A.S.; Raja, G.M.; Harindran, K.; Rajan, P.; Sankar, S.S.; Sankar, V.C.J. Design and development of a maximum power point tracker and its testing setup for wind energy conversion system with laboratory level devices. In Proceedings of the 2017 International Conference on Technological Advancements in Power and Energy (TAP Energy), Kollam, India, 21–23 December 2017; pp. 1–5. [Google Scholar]
- Benaaouinate, L.; Khafallah, M.; Mesbahi, A.; Martinez, A. Development of a useful wind turbine emulator based on permanent magnet DC motor. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals Devices (SSD), Marrakech, Morocco, 20–31 March 2017; pp. 44–48. [Google Scholar]
- Karabacak, M. A new perturb and observe based higher order sliding mode MPPT control of wind turbines eliminating the rotor inertial effect. Renew. Energy 2019, 133, 807–827. [Google Scholar] [CrossRef]
- Sewwandi, K.M.G.Y.; Senarathna, T.S.S.; Lakshika, K.A.H.; Wong, V.Y.; Hemapala, K.T.M.U.; Lucas, J.R.; Porawagamage, G.D. Wind turbine emulator for a microgrid. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–6. [Google Scholar]
- Llano, D.X.; McMahon, R.A. Modelling, control and sensorless speed estimation of micro-wind turbines for deployment in Antarctica. IET Renew. Power Gener. 2018, 12, 342–350. [Google Scholar] [CrossRef]
- Hoffmann, K. Applying the Wheatstone Bridge Circuit; HBM Germany: Darmstadt, Germany, 1974. [Google Scholar]
- Hagiwara, N.; Suzuki, Y.; Murase, H. A method of improving the resolution and accuracy of rotary encoders using a code compensation technique. IEEE Trans. Instrum. Meas. 1992, 41, 98–101. [Google Scholar] [CrossRef]
- USB-6211 Specifications—National Instruments. Available online: http://www.ni.com/pdf/manuals/375195d.pdf (accessed on 22 October 2019).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Heier | 0.5 | 116 | 0.4 | 0 | 0 | 5 | 21 | 0.0068 | 0.08 | 0.035 |
| Parameter | Value |
|---|---|
| Maximum torque | 50 N·m |
| Sensitivity | ±2.09 mV/V |
| Input voltage (DC) | 10 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozawa, F.; Rocha, M.; Lucas, G.; Souza, W.; Andreoli, A. Application of Torque Transducer and Rotary Encoder in a Hardware-in-the-Loop Wind Turbine Emulation. Proceedings 2020, 42, 55. https://doi.org/10.3390/ecsa-6-06633
Ozawa F, Rocha M, Lucas G, Souza W, Andreoli A. Application of Torque Transducer and Rotary Encoder in a Hardware-in-the-Loop Wind Turbine Emulation. Proceedings. 2020; 42(1):55. https://doi.org/10.3390/ecsa-6-06633
Chicago/Turabian StyleOzawa, Felipe, Marco Rocha, Guilherme Lucas, Wallace Souza, and Andre Andreoli. 2020. "Application of Torque Transducer and Rotary Encoder in a Hardware-in-the-Loop Wind Turbine Emulation" Proceedings 42, no. 1: 55. https://doi.org/10.3390/ecsa-6-06633