Environmental Monitoring Integrated with a Proactive Marine Information System †





{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. MIS Architecture
- Data Gathering: EDSS has to take into account a large variety of data. These data gathered, even in real-time condition, from different sensors are: SAR and hyperspectral images and interpretative reports, data collected in-situ by buoys or underwater autonomous vehicles (such as weather condition, wave and e-nose), weather forecast data, simulation models, and maritime traffic.
- Diagnosis and/or Prediction: Risk analysis models are applied for diagnosis and prediction. Gathered data are fused and related together considering the site characteristics aiming at detecting oil spill events and their evolution.
- Decision Support: Support to decision is supplied in terms of an optimized plan of exploitation of the available resources to accurately confirm the event and issue an alert. Further information about the oil spill are presented together in order to precisely address the event and provide an useful aid for the choice of best intervention policies to be adopted.
3. Dynamic Risk Map Model
3.1. Maritime Traffic
3.2. Oil Spill Reports
3.3. In Situ Observations
3.4. Local Monitoring Coverage
3.5. Risk Assessment and Multi-Scale Visualization
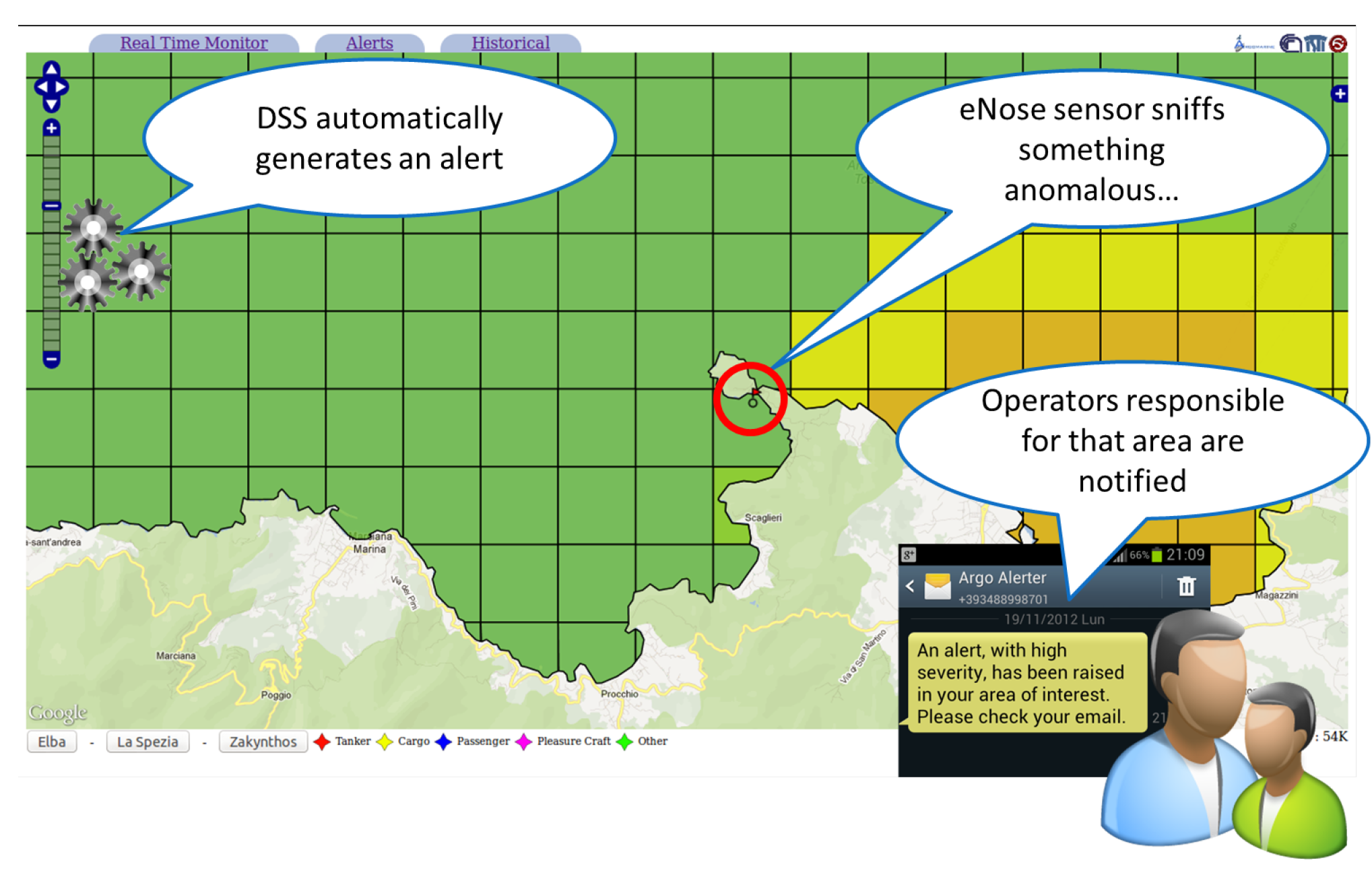
4. Proactive Services for Environmental Monitoring
5. Field Tests and Results
6. Discussion and Conclusions
Acknowledgments
References
- Abascal, A.J.; Castanedo, S.; Medina, R.; Liste, M. Analysis of the reliability of a statistical oil spill response model. Mar. Pollut. Bull. 2010, 60, 2099–2110. [Google Scholar] [CrossRef] [PubMed]
- Jordi, A.; Ferrer, M.; Vizoso, G.; Orfila, A.; Basterretxea, G.; Casas, B.; Álvarez, A.; Roig, D.; Garau, B.; Martínez, M.; et al. Scientific management of Mediterranean coastal zone: A hybrid ocean forecasting system for oil spill and search and rescue operations. Mar. Pollut. Bull. 2006, 53, 361–368. [Google Scholar] [CrossRef] [PubMed]
- Ferraro, G.; Meyer-Roux, S.; Muellenhoff, O.; Pavliha, M.; Svetak, J.; Tarchi, D.; Topouzelis, K. Long term monitoring of oil spills in European seas. Int. J. Remote Sens. 2009, 30, 627–645. [Google Scholar] [CrossRef]
- Janeiro, J.; Zacharioudaki, A.; Sarhadi, E.; Neves, A.; Martins, F. Enhancing the management response to oil spills in the Tuscany Archipelago through operational modelling. Mar. Pollut. Bull. 2014, 85, 574–589. [Google Scholar] [CrossRef] [PubMed]
- Cortès, U.; Sànchez-Marrè, M.; Ceccaroni, L.; R-Roda, I.; Poch, M. Artificial intelligence and environmental decision support systems. Appl. Intell. 2000, 13, 77–91. [Google Scholar] [CrossRef]
- Directive, I. 2/EC of the European Parliament and of the Council of 14 March 2007 establishing an Infrastructure for Spatial Information in the European Community (INSPIRE); European Parliament and of the Council of the European Union: Strasbourg, France, 2007. [Google Scholar]
- Moroni, D.; Pieri, G.; Tampucci, M.; Salvetti, O. A proactive system for maritime environment monitoring. Mar. Pollut. Bull. 2016, 102, 316–322. [Google Scholar] [CrossRef] [PubMed]
- Cocco, M.; Colantonio, S.; D’Acunto, M.; Martinelli, M.; Moroni, D.; Pieri, G.; Salvetti, O.; Tampucci, M. Geomatrix model as new tool for improving oil spill surveillance. In International Conference on Instrumentation, Measurement, Circuits and Systems (ICIMCS 2011); ASME Press: New York, NY, USA, 2011. [Google Scholar]
- Martinelli, M.; Moroni, D.; Pieri, G.; Tampucci, M. A proactive gis infrastructure for environmental monitoring. In Proceedings of the Seventeenth International Water Technology Conference (IWTC17), Istanbul, Turkey, 5–7 November 2013. [Google Scholar]
- Laxhammar, R.; Falkman, G.; Sviestins, E. Anomaly detection in sea traffic-a comparison of the gaussian mixture model and the kernel density estimator. In Proceedings of the 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 756–763. [Google Scholar]
- Moroni, D.; Pieri, G.; Salvetti, O.; Tampucci, M. Proactive marine information system for environmental monitoring. In Proceedings of the OCEANS 2015-Genova, Genoa, Italy, 18–21 May 2015; pp. 1–5. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moroni, D.; Pieri, G.; Tampucci, M.; Salvetti, O. Environmental Monitoring Integrated with a Proactive Marine Information System. Proceedings 2018, 2, 98. https://doi.org/10.3390/proceedings2020098
Moroni D, Pieri G, Tampucci M, Salvetti O. Environmental Monitoring Integrated with a Proactive Marine Information System. Proceedings. 2018; 2(2):98. https://doi.org/10.3390/proceedings2020098
Chicago/Turabian StyleMoroni, Davide, Gabriele Pieri, Marco Tampucci, and Ovidio Salvetti. 2018. "Environmental Monitoring Integrated with a Proactive Marine Information System" Proceedings 2, no. 2: 98. https://doi.org/10.3390/proceedings2020098