Scene Wireframes Sketching for Drones †


CITIUS, Rúa de Jenaro de la Fuente, s/n, Santiago de Compostela, 15705 A Coruña, Spain
*
Author to whom correspondence should be addressed.
†
Presented at the XoveTIC Congress, A Coruña, Spain, 27–28 September 2018.
Proceedings 2018, 2(18), 1193; https://doi.org/10.3390/proceedings2181193
Published: 17 September 2018
(This article belongs to the Proceedings of XoveTIC Congress 2018)
{kind=link}
{kind=link}
Abstract
:The increasing use of autonomous UAVs inside buildings and around human-made structures demands new accurate and comprehensive representation of their operation environments. Most of the 3D scene abstraction methods use invariant feature point matching, nevertheless some sparse 3D point clouds do not concisely represent the structure of the environment. Likewise, line clouds constructed by short and redundant segments with inaccurate directions limit the understanding of scenes as those that include environments with poor texture, or whose texture resembles a repetitive pattern. The presented approach is based on observation and representation models using the straight line segments, whose resemble the limits of an urban indoor or outdoor environment. The goal of the work is to get a full method based on the matching of lines that provides a complementary approach to state-of-the-art methods when facing 3D scene representation of poor texture environments for future autonomous UAV.
1. Introduction
The vast majority of the current approaches for 3D scene reconstruction are based on point clouds. Commonly, points are matched between pairs of views based on their descriptors, then triangulated [1] to make an initial estimation of their location in 3D space, and finally their poses are adjusted by least squares minimization [2]. A number of efficient point detectors and descriptor have made it possible to obtain robust and detailed 3D reconstructions based on feature point clouds [3,4,5,6]. These algorithms made possible to evolve from simple 3D reconstructions of the surfaces [7] to dense point reconstructions of extensive landscapes and cities [8].
The goal of this work is to obtain a real-time three dimensional representation of a scene by using a limited number of matched straight segments. Our approach takes advantage of multi-scale line detection and matching [9] to increase the accuracy of the line endpoints triangulation among pairs of line-matched frames. Secondly, our method goes one step ahead in the least squares adjustment of cameras and lines by exploiting geometrical relationships of the coplanar lines. After classifying the spatial lines according to their co-planarity, the intersection of the observed lines are brought into a second run of the SBA process.
2. Materials and Methods
The first problem to solve for the computation of a 3D sketch from the matched observations is that the camera poses P are unknown. These can be estimated from the endpoint correspondences of l of from a feature points based SfM pipeline. The first camera is provided with the pose , being the calibration matrix. The rest of cameras will be stacked from this position in the world reference frame. Once we have the camera matrices for the first pair of cameras, a linear triangulation method [10] can be used to retrieve the first estimations for 3D lines, i.e., the members of with observed counterpart on both camera planes. The final spatial segments are obtained as the centre of gravity of their estimations obtained in the stereo triangulations. Finally, a Bundle Adjustment is performed to optimize the relative pose for the cameras and spatial lines. The flow for the proposed method is depicted in Figure 1.
3. Results
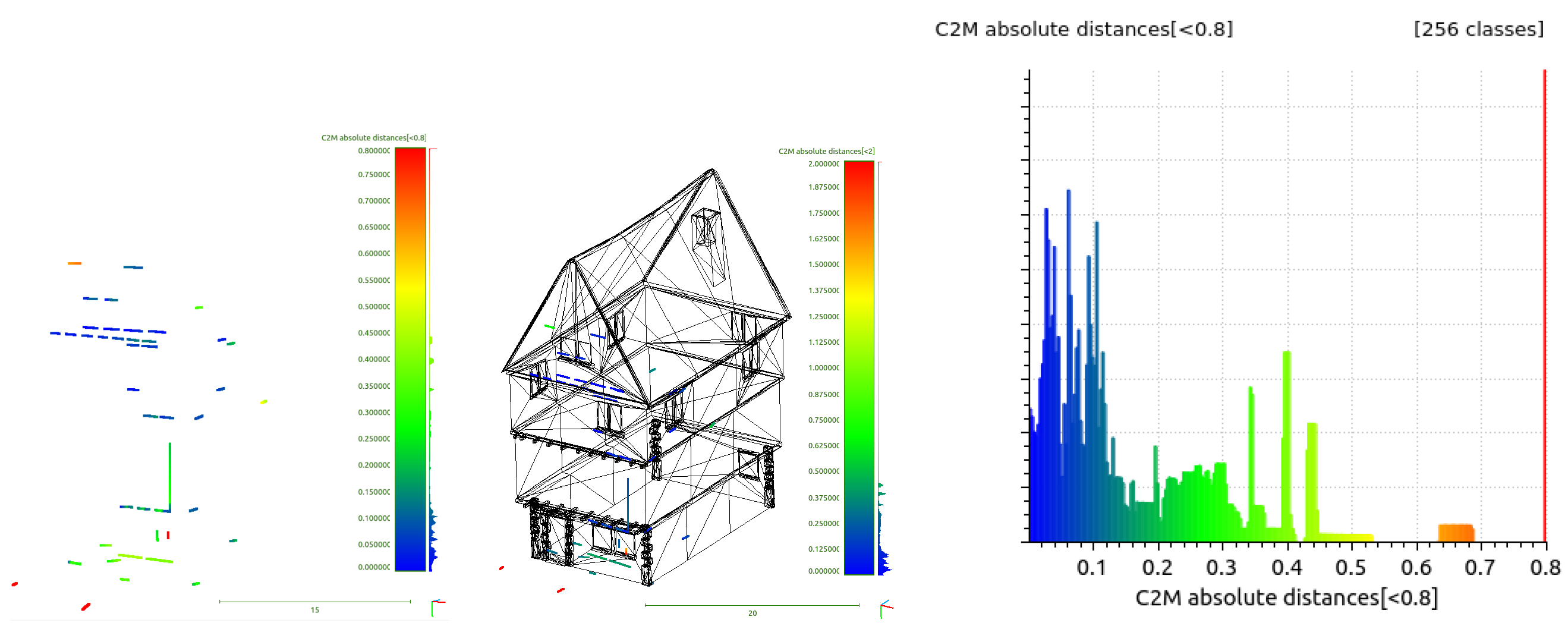
Figure 1 shows the result of the proposed method employing 8 images from the public Ground Truth dataset [11]. It is compared compare to the results of Line3D++ [12], shown in Figure 2. The result proves that the proposed method is able to obtain a number of structures of the house from a low number of images, and still holding a decent accuracy. On the other hand, the method Line3D++ [12] returns sparse short segments. This sparsity complicates the understanding of what the spatial line cloud is resembling, and difficult the alignment to the Ground Truth mesh. Note that this method also fails to retrieve any long segment of the house for this test case.
4. Conclusions
This work presents a novel integration of a set of algorithms to create a line-based spatial sketch, showing the main structures of the man-made environment laying in front of a camera. It gets as input its intrinsic parameters and at least 3 pictures. The set of methods include novel observation relations of groups of straight segments that are captured from different poses. Quantitative results have been obtained and compared with other state-of-the-art line based SfM method. Future work might include the exploitation of weak epipolar constraints during the line matching process.
Author Contributions
Conceptualization, R.S., X.M.P. and X.R.F.-V.; Methodology, R.S., X.M.P. and X.R.F.-V.; Software, R.S.; Validation, R.S., X.M.P. and X.R.F.-V.; Formal Analysis, R.S., X.M.P. and X.R.F.-V. Writing—Review & Editing, R.S., X.M.P. and X.R.F.-V.; Supervision, X.M.P. and X.R.F.-V.
Funding
This work has received financial support from the Xunta de Galicia (Centro singular de investigación de Galicia accreditation 2016–2019) and the European Union (European Regional Development Fund–ERDF).
Acknowledgments
This work has received financial support from the Xunta de Galicia (Centro singular de investigación de Galicia accreditation 2016–2019) and the European Union (European Regional Development Fund–ERDF).
Conflicts of Interest
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| UAV | Unmanned Aereal Vehicle |
| SfM | Structure-From-Motion |
References
- Hartley, R.I.; Sturm, P. Triangulation. Comput. Vis. Image Underst. 1997, 68, 146–157. [Google Scholar] [CrossRef]
- Triggs, B.; Mclauchlan, P.; Hartley, R.; Fitzgibbon, A. Bundle Adjustment—A Modern Synthesis. In Proceedings of the ICCV ’99 International Workshop on Vision Algorithms: Theory and Practice, Corfu, Greece, 21–22 September 1999; Volume 1, pp. 298–372. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 2, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 IEEE International Conference on IEEE, Computer Vision (ICCV), Kona, HI, USA, 5–7 January 2011; pp. 2564–2571. [Google Scholar]
- Alcantarilla, P.; Bartoli, A.; Davison, A. KAZE features. In Proceedings of the Computer Vision–ECCV 2012, Florence, Italy, 7–13 October 2012; pp. 214–227. [Google Scholar]
- Pollefeys, M.; Van Gool, L.; Vergauwen, M.; Verbiest, F.; Cornelis, K.; Tops, J.; Koch, R. Visual modeling with a hand-held camera. Int. J. Comput. Vis. 2004, 59, 207–232. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo tourism: Exploring photo collections in 3D. ACM Trans. Graph. (TOG) 2006, 25, 835–846. [Google Scholar] [CrossRef]
- López, J.; Santos, R.; Fdez-Vidal, X.R.; Pardo, X.M. Two-view line matching algorithm based on context and appearance in low-textured images. Pattern Recognit. 2015, 48, 2164–2184. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge Press, 2004. [Google Scholar]
- Jain, A.; Kurz, C.; Thormählen, T.; Seidel, H.P. Exploiting Global Connectivity Constraints for Reconstruction of 3D Line Segment from Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2010), San Francisco, CA, USA, 13–18 June 2010. [Google Scholar]
- Hofer, M.; Maurer, M.; Bischof, H. Efficient 3D scene abstraction using line segments. Comput. Vis. Image Underst. 2016, 157, 167–178. [Google Scholar] [CrossRef]
Figure 1.
Resulting line matching using the proposed method for images {5,8} of the dataset [11]. Resulting 3D abstraction and measurements of distances to Ground Truth mesh.
Figure 1.
Resulting line matching using the proposed method for images {5,8} of the dataset [11]. Resulting 3D abstraction and measurements of distances to Ground Truth mesh.
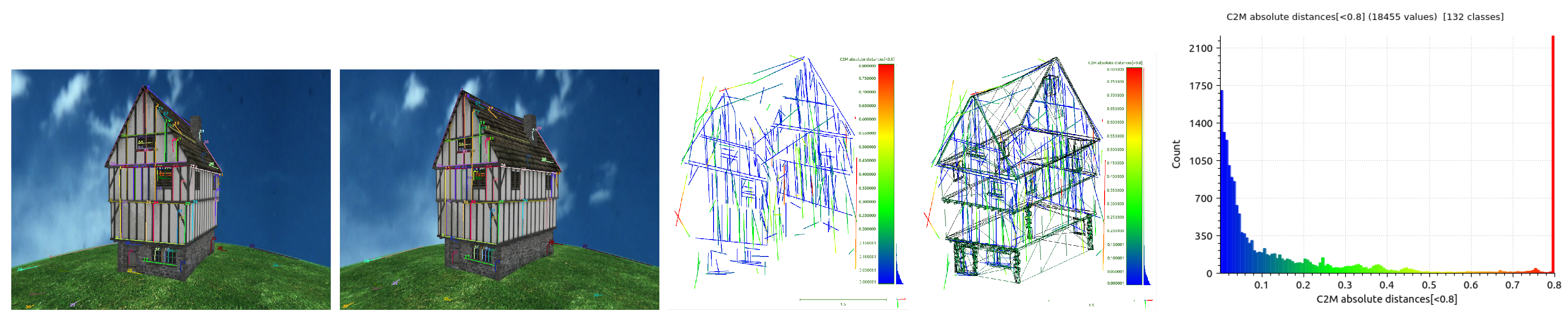
Figure 2.
Results with the method Line3D++ [12], using the same set of images as input.
Figure 2.
Results with the method Line3D++ [12], using the same set of images as input.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Santos, R.; Pardo, X.M.; Fdez-Vidal, X.R. Scene Wireframes Sketching for Drones. Proceedings 2018, 2, 1193. https://doi.org/10.3390/proceedings2181193
AMA Style
Santos R, Pardo XM, Fdez-Vidal XR. Scene Wireframes Sketching for Drones. Proceedings. 2018; 2(18):1193. https://doi.org/10.3390/proceedings2181193
Chicago/Turabian StyleSantos, Roi, Xose M. Pardo, and Xose R. Fdez-Vidal. 2018. "Scene Wireframes Sketching for Drones" Proceedings 2, no. 18: 1193. https://doi.org/10.3390/proceedings2181193