
Adaptive Neural Control for a Class of Random Fractional-Order Multi-Agent Systems with Markov Jump Parameters and Full State Constraints



Abstract
:1. Introduction
- (1)
- In contrast to the consensus studies for MASs [41,42], to enhance the system performance, we take a novel fractional-order state-constrained multi-agent system with Markov jump parameters driven by random differential equations into account, in which the random noise is the second-order stationary stochastic process.
- (2)
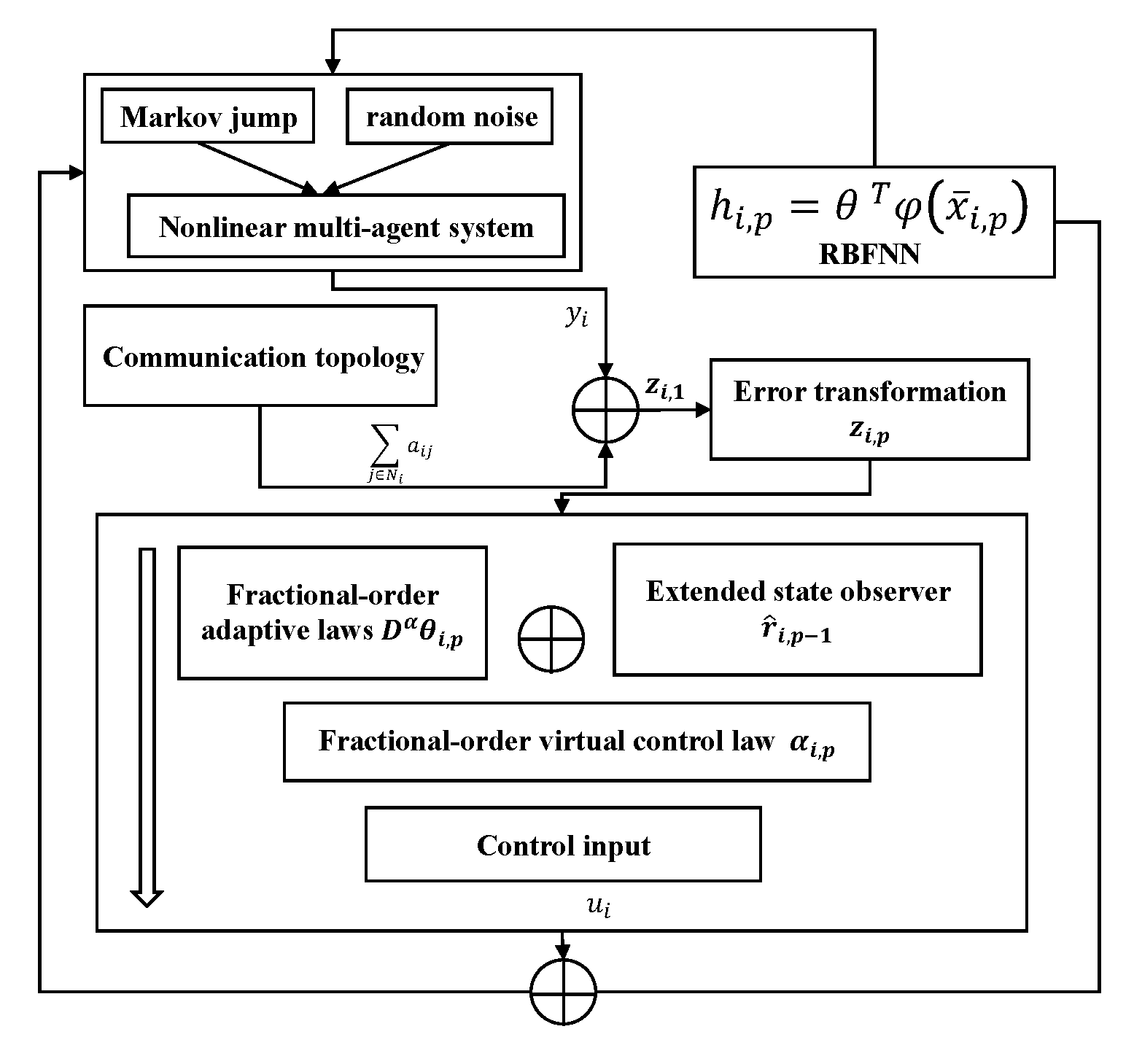
- Unlike [27], for a class of state-constrained FOMASs with Markov jump structures, this paper proposes the approximation tracking method of adaptive neural control, combining NNs and the backstepping technique together to achieve the consensus control target and ensure the system’s noise-to-state stability.
- (3)
2. Problem Formulation and Preliminaries
2.1. Fractional Calculus
2.2. Graph Theory
2.3. Random Nonlinear Markov Jump Multi-Agent System
2.4. Tan-Type BLFs
3. Main Results
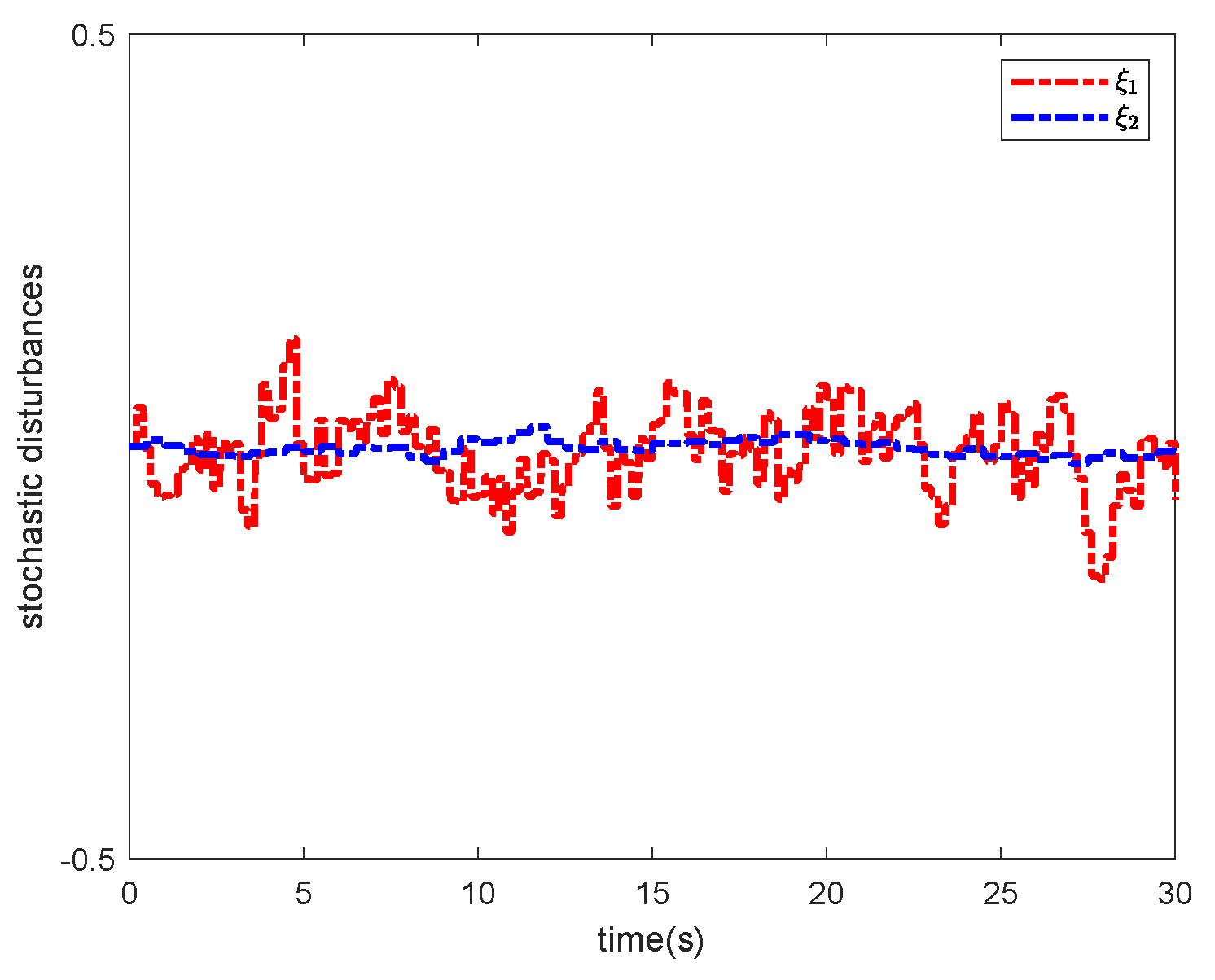
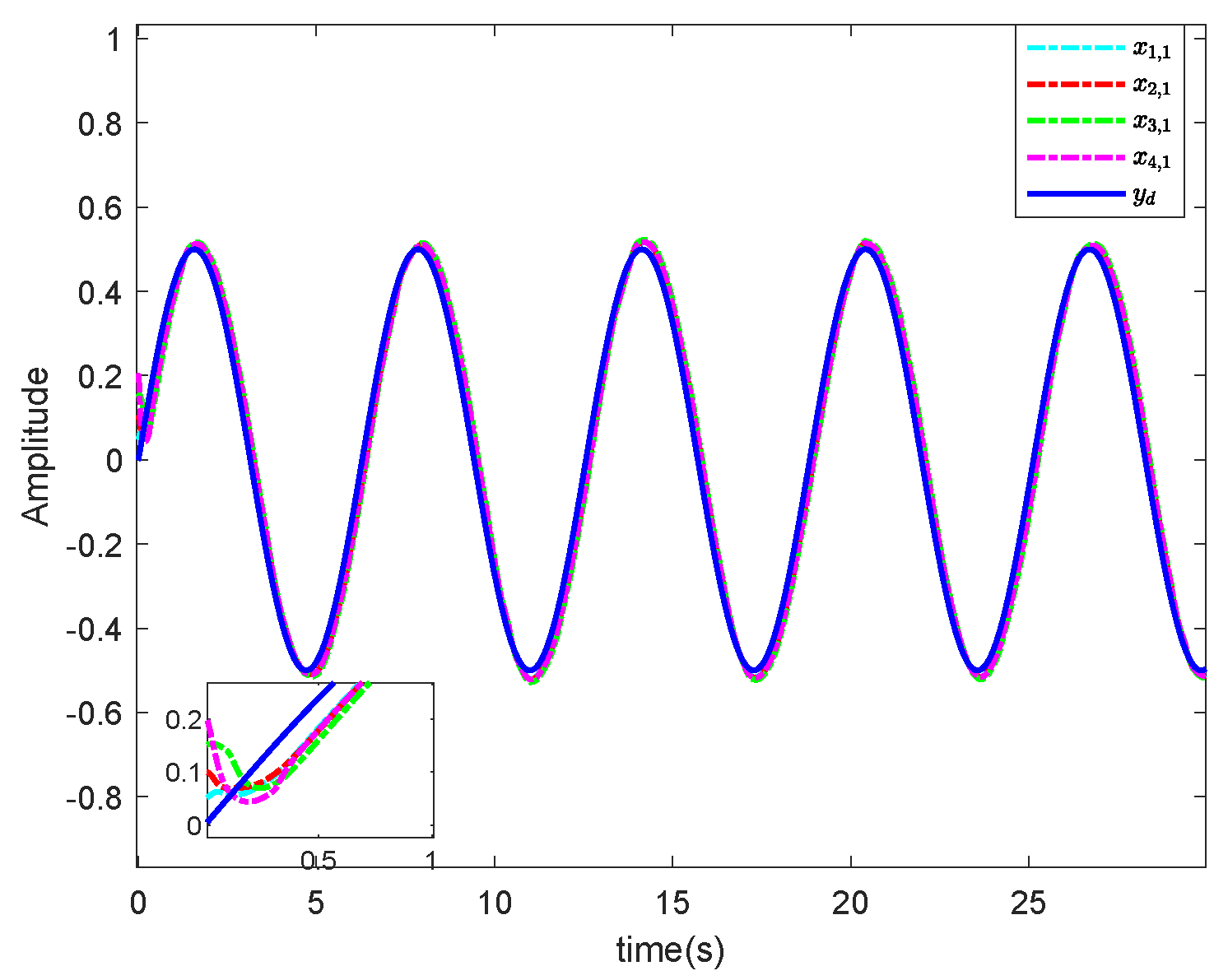
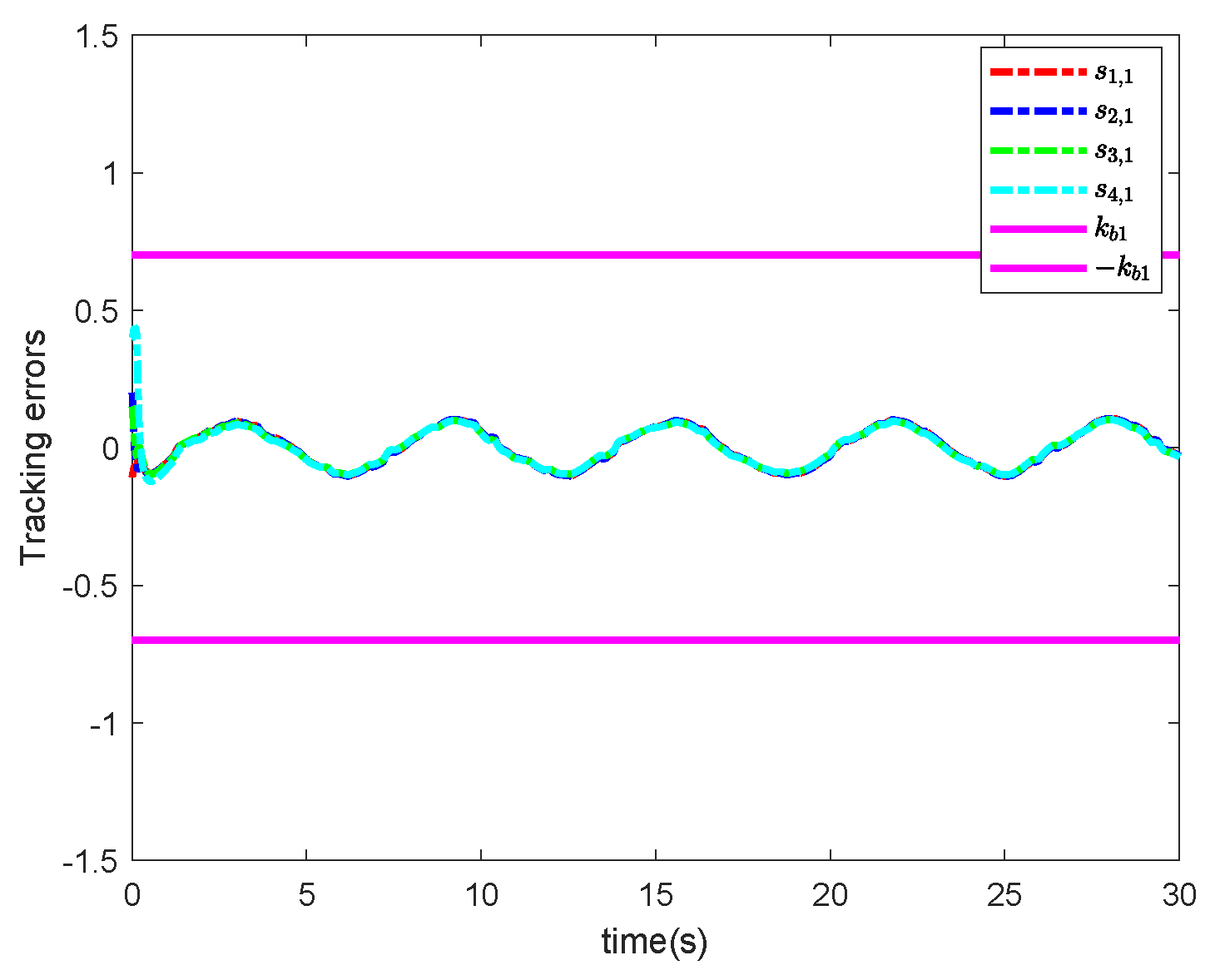
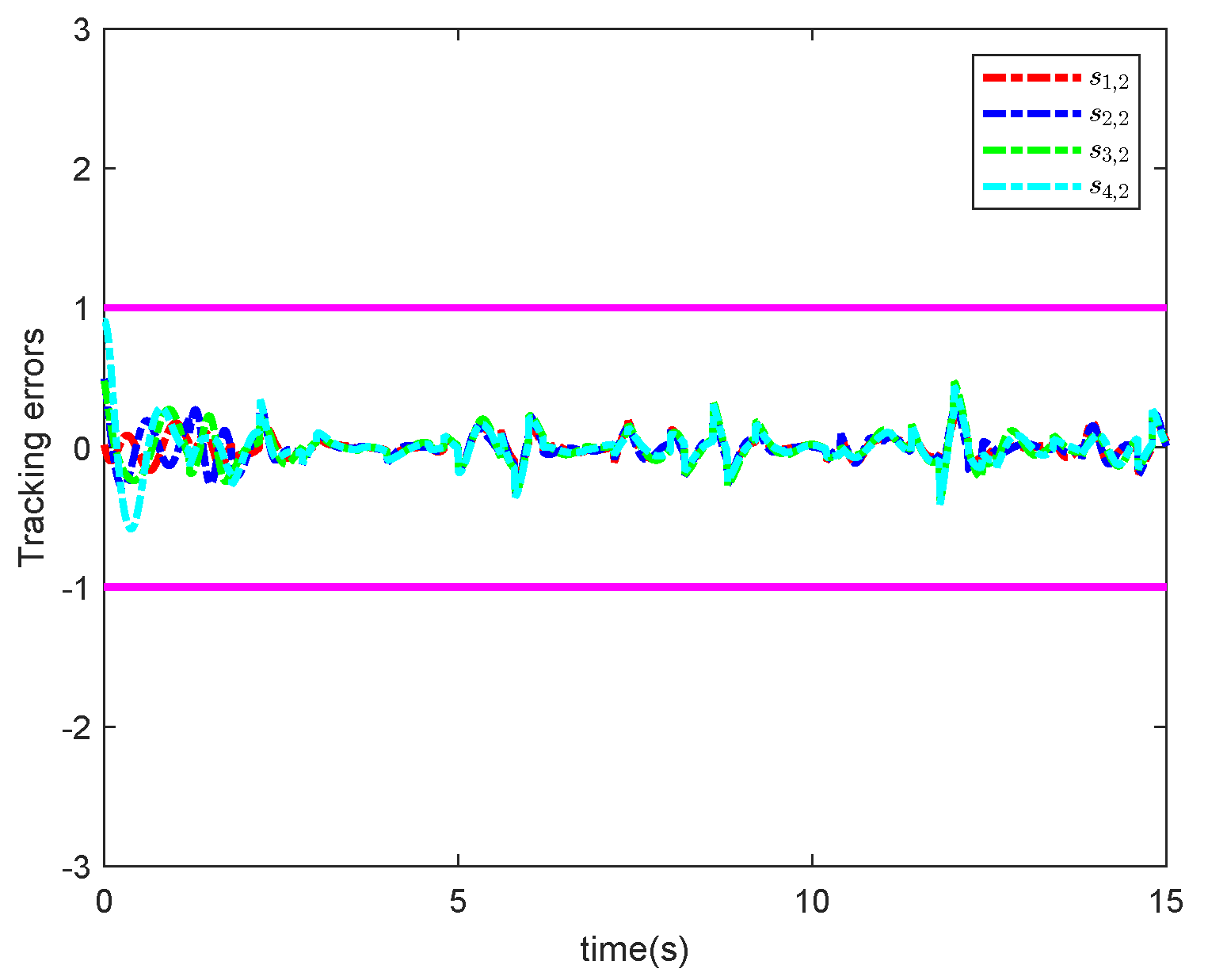
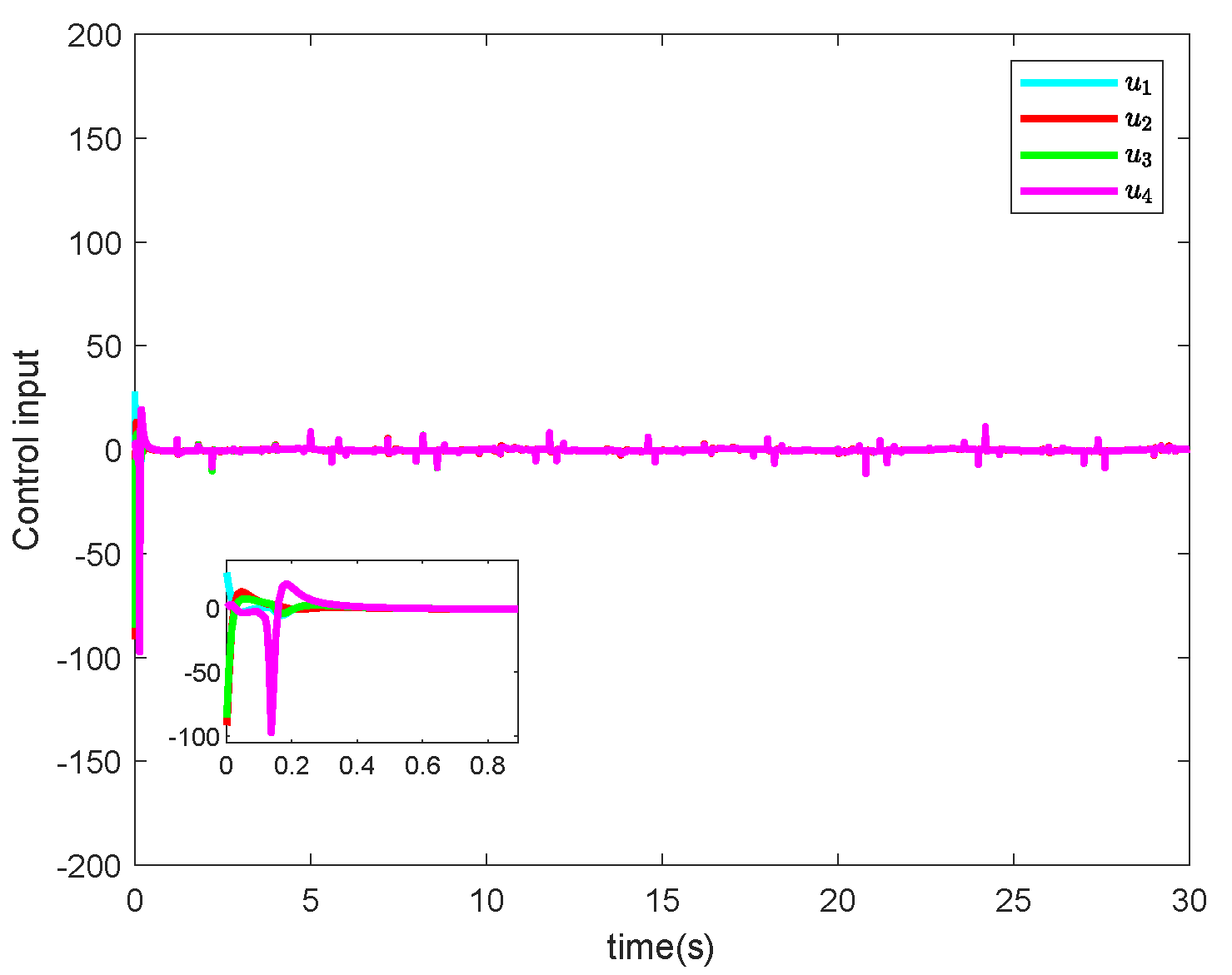
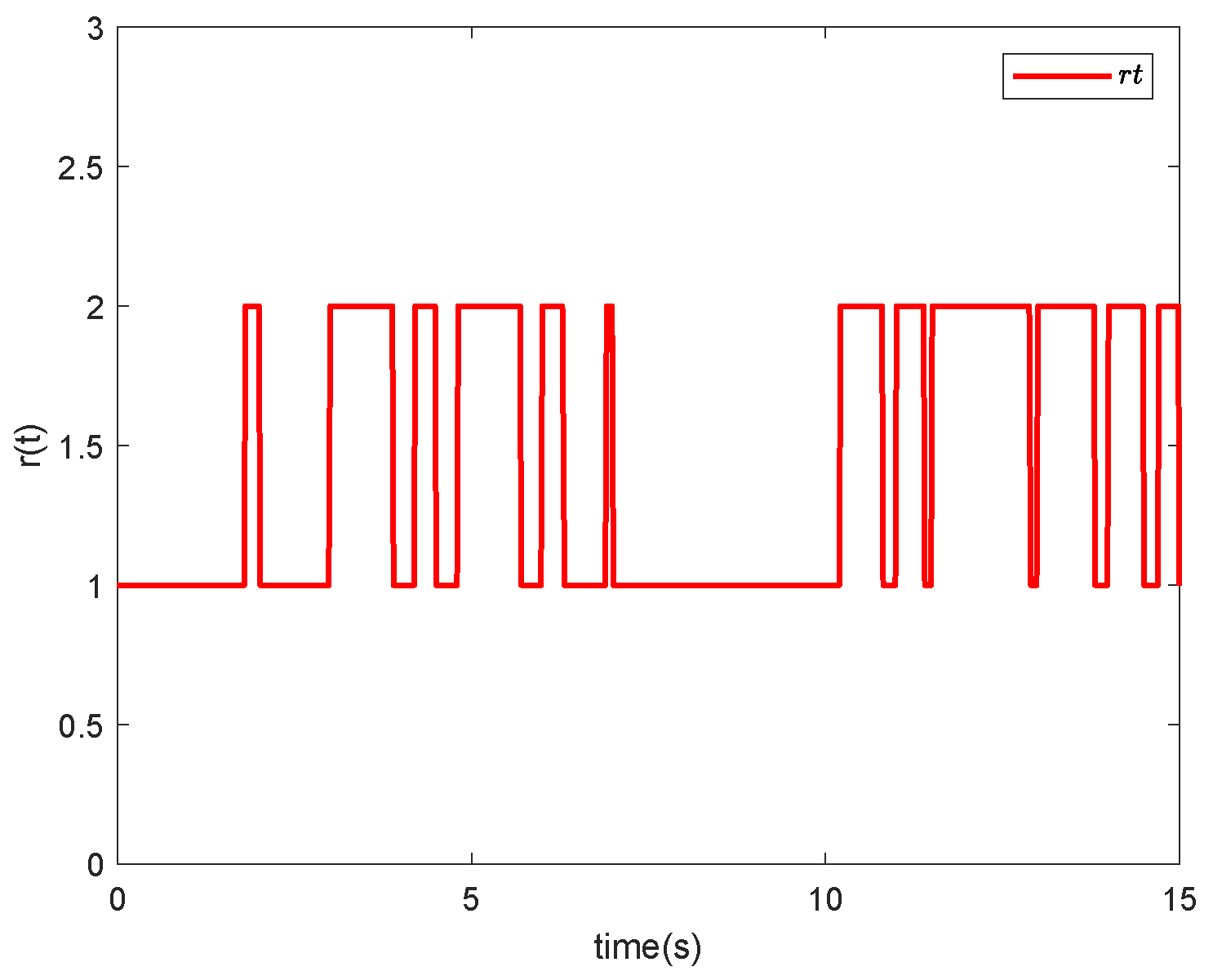
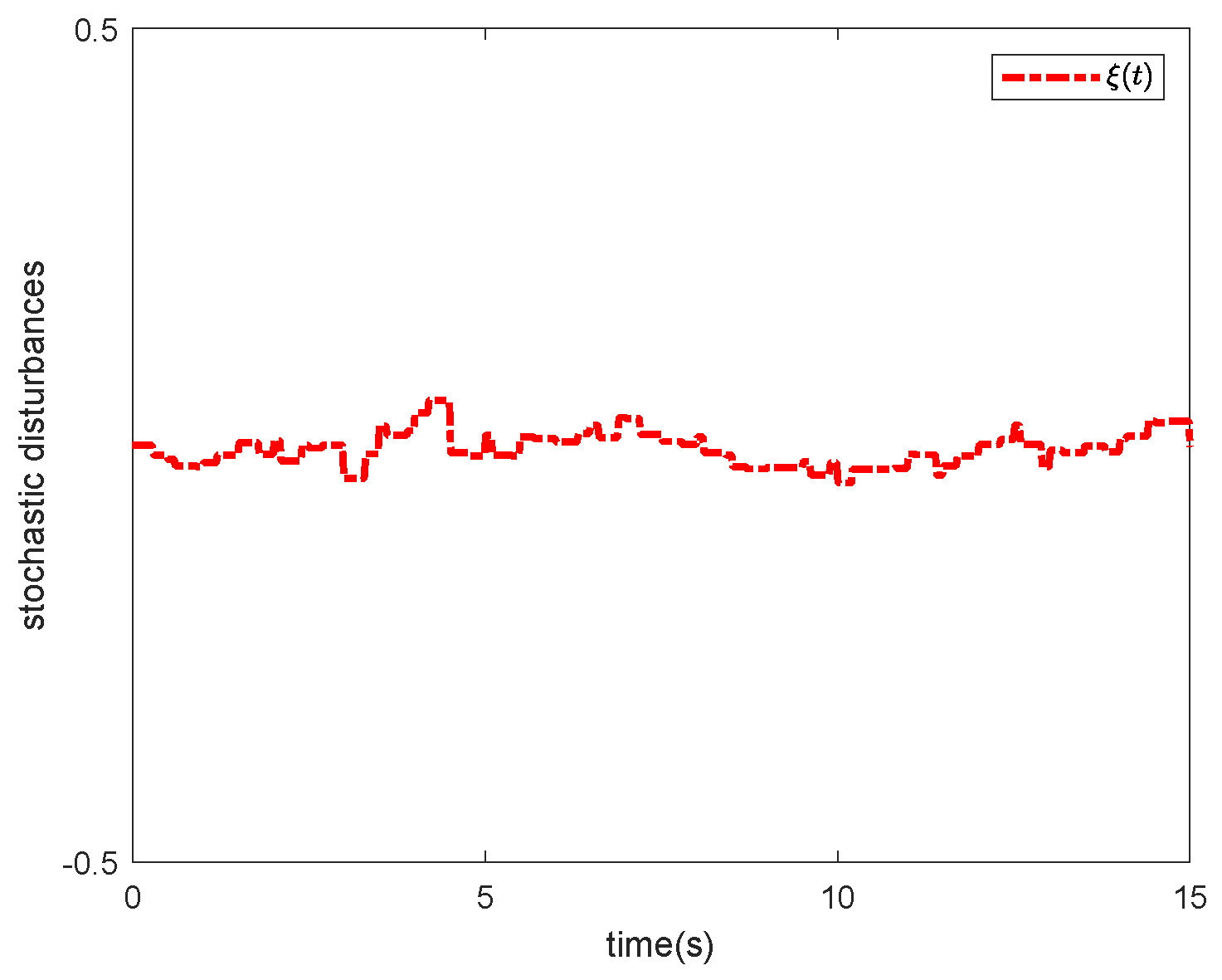
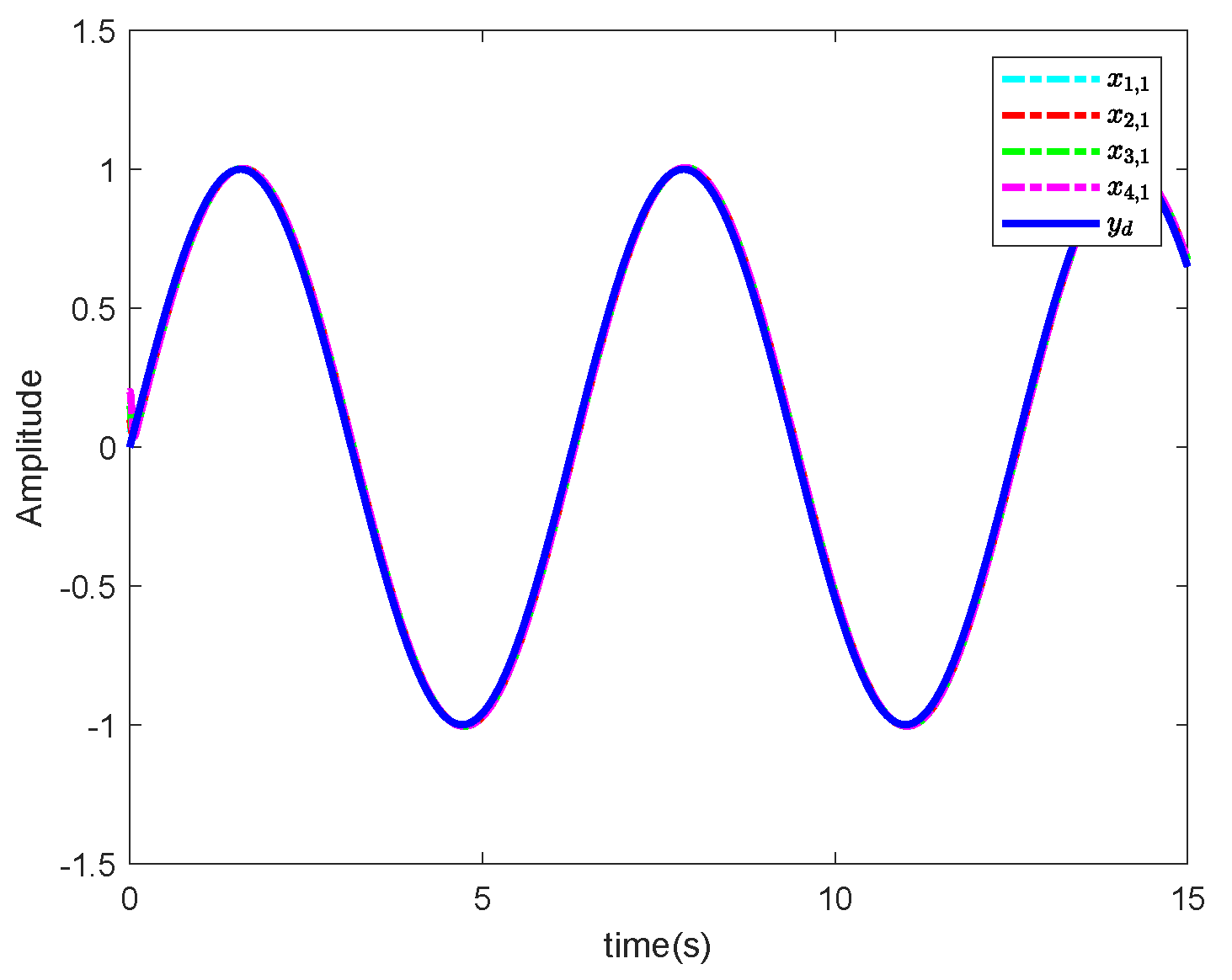
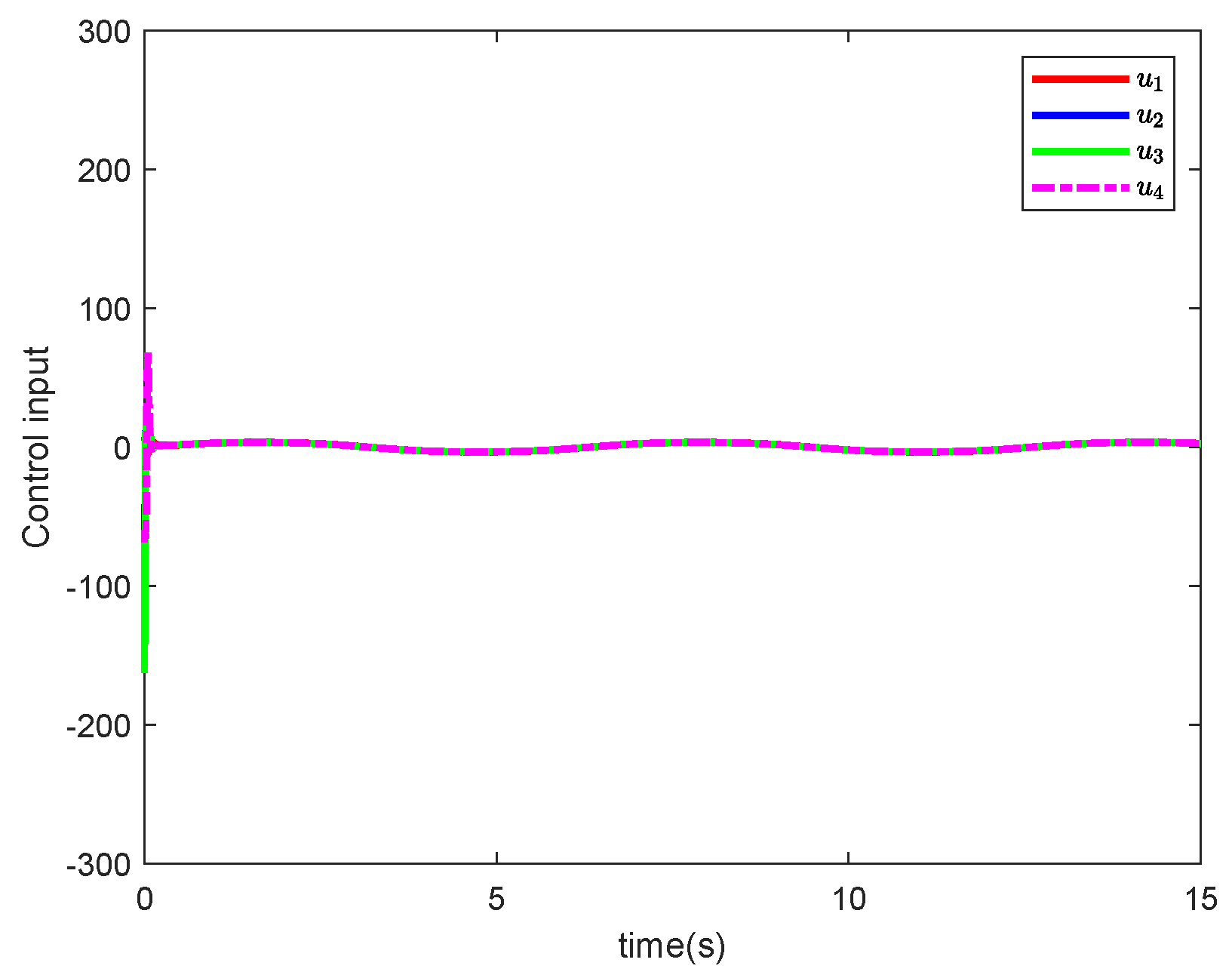
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbol | Definition |
| NNs | Neural networks |
| RBFNNs | Radial basis function neural networks |
| ESO | Extended state observer |
| MASs | Multi-agent systems |
| FOMASs | Fractional-order multi-agent systems |
| SDEs | Stochastic differential equations |
| RDEs | Random differential equations |
| FLSs | Fuzzy logic systems |
| BLF | Barrier Lyapunov function |
| TBLF | Tan-type barrier Lyapunov function |
| Real number space | |
| -dimensional vector space |
References
- Parivallal, A.; Sakthivel, R.; Amsaveni, R.; Alzahrani, F.; Alshomrani, A.S. Observer-based memory consensus for nonlinear multi-agent systems with output quantization and Markov switching topologies. Phys. A Stat. Mech. Its Appl. 2020, 551, 123949. [Google Scholar] [CrossRef]
- Xu, J.; Deng, Z.; Ren, X.; Xu, L.; Liu, D. Invulnerability optimization of UAV formation based on super wires adding strategy. Chaos Solitons Fractals 2020, 140, 110185. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Chen, M.; Kong, L. Predefined-time sliding mode formation control for multiple autonomous underwater vehicles with uncertainties. Chaos Solitons Fractals 2021, 144, 110680. [Google Scholar] [CrossRef]
- Kauffman, S.A. Metabolic stability and epigenesis in randomly constructed genetic nets. J. Theor. Biol. 1969, 22, 437–467. [Google Scholar] [CrossRef]
- Goles, E.; Medina, P.; Montealegre, P.; Santivañez, J. Majority networks and consensus dynamics. Chaos Solitons Fractals 2022, 164, 112697. [Google Scholar] [CrossRef]
- Wang, W.; Yin, X.; Cao, Y.; Jiang, L.; Li, Y. A distributed cooperative control based on consensus protocol for VSC-MTDC systems. IEEE Trans. Power Syst. 2021, 36, 2877–2890. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, B.; Yu, J.; Ma, J.; Jiang, T. Consensus of first-order multi-agent systems with intermittent interaction. Neurocomputing 2014, 129, 273–278. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, Y.; Li, X. Cluster-delay consensus in first-order multi-agent systems with nonlinear dynamics. Nonlinear Dyn. 2016, 83, 1303–1310. [Google Scholar] [CrossRef]
- Hou, W.; Fu, M.; Zhang, H.; Wu, Z. Consensus conditions for general second-order multi-agent systems with communication delay. Automatica 2017, 75, 293–298. [Google Scholar] [CrossRef]
- Miao, G.; Xu, S.; Zhang, B.; Zou, Y. Mean square consensus of second-order multi-agent systems under Markov switching topologies. IMA J. Math. Control Inf. 2014, 31, 151–164. [Google Scholar] [CrossRef]
- Li, W.; Zhang, J.F. Distributed practical output tracking of high-order stochastic multi-agent systems with inherent nonlinear drift and diffusion terms. Automatica 2014, 50, 3231–3238. [Google Scholar] [CrossRef]
- Zhou, H.; Sui, S.; Tong, S. Fuzzy adaptive finite-time consensus control for high-order nonlinear multiagent systems based on event-triggered. IEEE Trans. Fuzzy Syst. 2022, 30, 4891–4904. [Google Scholar] [CrossRef]
- Jiang, J.; Jiang, Y. Leader-following consensus of linear time-varying multi-agent systems under fixed and switching topologies. Automatica 2020, 113, 108804. [Google Scholar] [CrossRef]
- Krasovskii, N.; Lidskii, E. Analytical design of controllers in systems with random attributes. Autom. Remote Control 1961, 22, 1021–1025. [Google Scholar]
- Benjelloun, K.; Boukas, E.K. Stochastic stability of linear time-delay system with Markovian jumping parameters. Math. Probl. Eng. 1997, 3, 187–201. [Google Scholar] [CrossRef]
- Drǎgan, V.; Shi, P.; Boukas, E.K. Control of singularly perturbed systems with Markovian jump parameters: An H infinity approach. Automatica 1999, 35, 1369–1378. [Google Scholar] [CrossRef]
- Li, W.; Wu, Z. Output tracking of stochastic high-order nonlinear systems with Markovian switching. IEEE Trans. Autom. Control 2012, 58, 1585–1590. [Google Scholar] [CrossRef]
- Wu, Z.J.; Yang, J.; Shi, P. Adaptive tracking for stochastic nonlinear systems with markovian switching. IEEE Trans. Autom. Control 2010, 55, 2135–2141. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Z.; Wu, Z.; Wang, W. Distributed convex optimization for nonlinear multi-agent systems disturbed by a second-order stationary process over a digraph. Sci. China Inf. Sci. 2022, 65, 132201. [Google Scholar] [CrossRef]
- Liu, S.; Niu, B.; Zong, G.; Zhao, X.; Xu, N. Adaptive neural dynamic-memory event-triggered control of high-order random nonlinear systems with deferred output constraints. IEEE Trans. Autom. Sci. Eng. 2023. [Google Scholar] [CrossRef]
- Yao, L.; Zhang, W. Adaptive tracking control for a class of random pure-feedback nonlinear systems with Markovian switching. Int. J. Robust Nonlinear Control 2018, 28, 3112–3126. [Google Scholar] [CrossRef]
- Jiao, T.; Lu, J.; Li, Y.; Chu, Y.; Xu, S. Stability analysis of random systems with Markovian switching and its application. J. Frankl. Inst. 2016, 353, 200–220. [Google Scholar] [CrossRef]
- Xu, Z.; Zhou, X.; Dong, Z.; Hu, X.; Sun, C.; Shen, H. Observer-based prescribed performance adaptive neural output feedback control for full-state-constrained nonlinear systems with input saturation. Chaos Solitons Fractals 2023, 173, 113593. [Google Scholar] [CrossRef]
- Wu, J.; Qin, G.; Cheng, J.; Cao, J.; Yan, H.; Katib, I. Adaptive neural network control for Markov jumping systems against deception attacks. Neural Netw. 2023, 168, 206–213. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, J.; Liang, H.; Li, H. Event-triggered adaptive tracking control for multiagent systems with unknown disturbances. IEEE Trans. Cybern. 2018, 50, 890–901. [Google Scholar] [CrossRef]
- Wang, Z.; Yuan, Y.; Yang, H. Adaptive fuzzy tracking control for strict-feedback Markov jumping nonlinear systems with actuator failures and unmodeled dynamics. IEEE Trans. Cybern. 2018, 50, 126–139. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Yuan, J.; Pan, Y.; Che, D. Adaptive neural control for high order Markovian jump nonlinear systems with unmodeled dynamics and dead zone inputs. Neurocomputing 2017, 247, 62–72. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Shi, P. Adaptive finite-time command filtered backstepping control for Markov jumping nonlinear systems with full-state constraints. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3244–3248. [Google Scholar] [CrossRef]
- Hu, A.; Cao, J.; Hu, M.; Guo, L. Event-triggered consensus of Markovian jumping multi-agent systems via stochastic sampling. IET Control Theory Appl. 2015, 9, 1964–1972. [Google Scholar] [CrossRef]
- Luo, X.; Wang, J.; Feng, J.; Cai, J.; Zhao, Y. Dynamic Event-Triggered Consensus Control for Markovian Switched Multi-Agent Systems: A Hybrid Neuroadaptive Method. Mathematics 2023, 11, 2196. [Google Scholar] [CrossRef]
- Sakthivel, R.; Parivallal, A.; Kaviarasan, B.; Lee, H.; Lim, Y. Finite-time consensus of Markov jumping multi-agent systems with time-varying actuator faults and input saturation. ISA Trans. 2018, 83, 89–99. [Google Scholar] [CrossRef]
- Ni, H.; Xu, Z.; Cheng, J.; Zhang, D. Robust stochastic sampled-data-based output consensus of heterogeneous multi-agent systems subject to random DoS attack: A Markovian jumping system approach. Int. J. Control. Autom. Syst. 2019, 17, 1687–1698. [Google Scholar] [CrossRef]
- Wu, L.B.; Park, J.H.; Xie, X.P.; Ren, Y.W.; Yang, Z. Distributed adaptive neural network consensus for a class of uncertain nonaffine nonlinear multi-agent systems. Nonlinear Dyn. 2020, 100, 1243–1255. [Google Scholar] [CrossRef]
- Chen, T.; Yuan, J. Command-filtered adaptive containment control of fractional-order multi-agent systems via event-triggered mechanism. Trans. Inst. Meas. Control 2023, 45, 1646–1660. [Google Scholar] [CrossRef]
- Yang, X.; Yuan, J.; Chen, T.; Yang, H. Distributed Adaptive Optimization Algorithm for Fractional High-Order Multiagent Systems Based on Event-Triggered Strategy and Input Quantization. Fractal Fract. 2023, 7, 749. [Google Scholar] [CrossRef]
- Yuan, J.; Chen, T. Switched fractional order multiagent systems containment control with event-triggered mechanism and input quantization. Fractal Fract. 2022, 6, 77. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S. Barrier Lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints. Automatica 2016, 64, 70–75. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, X.; She, W.; Ding, F. Tracking control with input saturation and full-state constraints for surface vessels. IEEE Access 2019, 7, 144741–144755. [Google Scholar] [CrossRef]
- Wang, C.; Wang, F.; Yu, J. BLF-based asymptotic tracking control for a class of time-varying full state constrained nonlinear systems. Trans. Inst. Meas. Control 2019, 41, 3043–3052. [Google Scholar] [CrossRef]
- Chen, T.; Yuan, J.; Yang, H. Event-triggered adaptive neural network backstepping sliding mode control of fractional-order multi-agent systems with input delay. J. Vib. Control 2022, 28, 3740–3766. [Google Scholar] [CrossRef]
- Gao, C.; Wang, Z.; He, X.; Han, Q.L. Consensus control of linear multiagent systems under actuator imperfection: When saturation meets fault. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 2651–2663. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Meyn, S.P.; Tweedie, R.L. Markov Chains and Stochastic Stability; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Liu, Y.; Zhu, Q.; Zhao, N.; Wang, L. Adaptive fuzzy backstepping control for nonstrict feedback nonlinear systems with time-varying state constraints and backlash-like hysteresis. Inf. Sci. 2021, 574, 606–624. [Google Scholar] [CrossRef]
- Gharesifard, B.; Cortés, J. Distributed continuous-time convex optimization on weight-balanced digraphs. IEEE Trans. Autom. Control 2013, 59, 781–786. [Google Scholar] [CrossRef]
- Yang, Y.; Si, X.; Yue, D.; Tian, Y.C. Time-varying formation tracking with prescribed performance for uncertain nonaffine nonlinear multiagent systems. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1778–1789. [Google Scholar] [CrossRef]
- Ross, S.M. Stochastic Processes; John Wiley & Sons: Hoboken, NJ, USA, 1995. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Example 1 | Example 2 |
|---|---|---|
| 1 | 1 | |
| 5 | 3 | |
| 0.5 | 0.6 | |
| 0.5 | 0.6 | |
| 1 | 1.5 | |
| 1 | 1.5 | |
| 0.7 | 0.5 | |
| 1 | 2 | |
| 0.1 | 0.1 | |
| 0.5 | 0.4 | |
| 0.6 | 0.6 | |
| 2 | 2 | |
| 50 | 60 | |
| 80 | 80 | |
| 0.8 | 0.8 |
| Parameter | Description | Value |
|---|---|---|
| the mass of load | kg | |
| l | length | m |
| g | the acceleration of gravity | m/s2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Yuan, J.; Chen, T.; Zhang, C.; Yang, H. Adaptive Neural Control for a Class of Random Fractional-Order Multi-Agent Systems with Markov Jump Parameters and Full State Constraints. Fractal Fract. 2024, 8, 278. https://doi.org/10.3390/fractalfract8050278
Yao Y, Yuan J, Chen T, Zhang C, Yang H. Adaptive Neural Control for a Class of Random Fractional-Order Multi-Agent Systems with Markov Jump Parameters and Full State Constraints. Fractal and Fractional. 2024; 8(5):278. https://doi.org/10.3390/fractalfract8050278
Chicago/Turabian StyleYao, Yuhang, Jiaxin Yuan, Tao Chen, Chen Zhang, and Hui Yang. 2024. "Adaptive Neural Control for a Class of Random Fractional-Order Multi-Agent Systems with Markov Jump Parameters and Full State Constraints" Fractal and Fractional 8, no. 5: 278. https://doi.org/10.3390/fractalfract8050278