

Understanding Operator Influence in Automated Urban Shuttle Buses and Recommendations for Future Development



Abstract
1. Introduction
2. Related Work
2.1. Pilot Projects
2.2. Acceptance and Accessibility of Shared Automated Vehicles
2.3. Roles of the Operator and Accompanying Challenges for Automated Shuttle Buses
- RQ1: What are the roles of operators in automated shuttle buses?
- RQ2: What are the preferred concepts for replacing operators aboard automated shuttle buses for the targeted SAE Level 5 scenario?
3. Study
3.1. Interviews with Operators and Observations
3.2. Interviews and Online Questionnaire with Passengers
3.2.1. On-Site Interviews
3.2.2. On-Campus Interviews
3.2.3. Online Questionnaire
3.2.4. Data Collection and Analysis
4. Results
4.1. Roles of the Operators
4.1.1. Traffic Controller and Road Safety Educator
4.1.2. Technician
4.1.3. “Driver”
4.1.4. The Psychologist
4.1.5. Informant
4.1.6. Supervisor
4.2. Other Road Users
4.3. Disparity between Perceived and Actual Roles of Operators and Their Importance
4.3.1. Acceptance
4.3.2. Technical Maturity
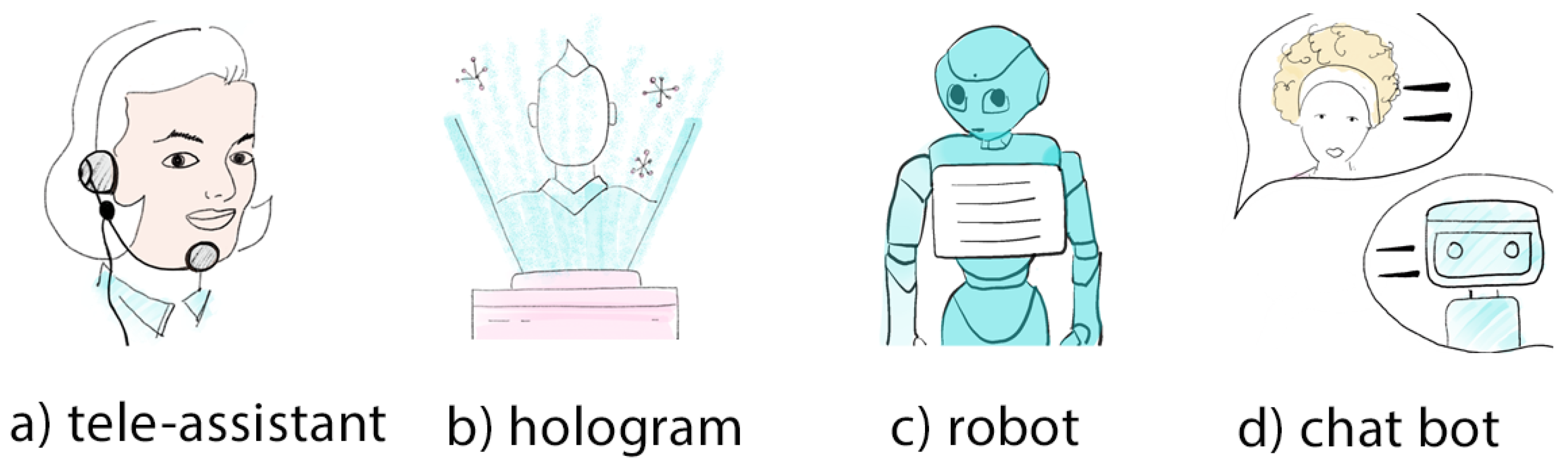
4.4. Concepts of Digital Companion
4.4.1. Human or AI?
4.4.2. Characteristics of the Digital Companion
4.5. Discussion
4.5.1. Acceptance Challenges
4.5.2. Communication with the External World
4.5.3. Operators and Digital Companions
5. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bardt, H. Deutsche Autoindustrie und autonomes Fahren. Wirtschaftsdienst 2016, 96, 776–778. [Google Scholar] [CrossRef][Green Version]
- Fleischer, T.; Puhe, M.; Schippl, J. Autonomes Fahren und soziale Akzeptanz: Konzeptionelle Überlegungen und empirische Einsichten. J. Mobil. Verk. 2022, 12, 9–23. [Google Scholar] [CrossRef]
- Luchmann, I.; Reuter, C.; Knoch, E.M.; Niemann, J. Voraussetzungen & Einsatzmöglichkeiten von automatisiert und elektrisch fahrenden (Klein-) Bussen im ÖPNV. J. Mobil. Verk. 2019, 12. [Google Scholar]
- Maurer, M.; Gerdes, J.C.; Lenz, B.; Winner, H. Autonomes Fahren Technische, Rechtliche und Gesellschaftliche Aspekte; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Nuro. Next-Generation Vehicle|Nuro. 24 November 2022. Available online: https://www.nuro.ai/ (accessed on 25 May 2022).
- Cruise LLC. Cruise Self Driving Cars|Autonomous Vehicles|Driverless Rides. 24 November 2022. Available online: https://www.verkehrsforschung.dlr.de/en/1-next-generation-car-vehicle-concepts (accessed on 22 June 2022).
- Korosec, K. Cruise Can Now Give Passengers Rides in Driverless Cars in California. TechCrunch. 5 June 2021. Available online: https://www.techcrunch.com/2021/06/04/cruise-can-now-give-passengers-rides-in-driverless-cars-in-california/ (accessed on 22 June 2022).
- NAVYA. Moving People—NAVYA. 5 February 2021. Available online: https://navya.tech/en/solutions/moving-people/ (accessed on 22 June 2022).
- Baidu Research. Robotics and Autonomous Driving. 24 November 2022. Available online: http://www.research.baidu.com/Research_Areas/index-view?id=58 (accessed on 22 June 2022).
- Bellan, R. Baidu to Operate Fully Driverless Commercial Robotaxi in Wuhan and Chongqing. TechCrunch. 8 August 2022. Available online: https://www.ft.com/content/22583bbe-29c2-4348-aac9-29f5d7c75bea (accessed on 22 August 2022).
- Transdev. First Latin American Autonomous Vehicle Project in Chile was a Great Success. 2021. Available online: https://www.transdev.com/en/news-en/chile-latin-american-autonomous-vehicle-project-success/l (accessed on 25 May 2022).
- Verkehrsunternehmen, V.V.D. Autonome Busse in Deutschland: Liste & Details der Projekte|VDV—Die Verkehrsunternehmen. 19 August 2022. Available online: https://www.vdv.de/liste-autonome-shuttle-bus-projekte.aspx (accessed on 25 May 2022).
- SMO—Shuttle-Modellregion Oberfranken. Kronach—SMO—Shuttle Modellregion Oberfranken. 25 July 2022. Available online: https://www.shuttle-modellregion-oberfranken.de/ (accessed on 15 August 2022).
- KelRide Wheater-Proof Smart Shuttle. Home—KelRide Wheater-Proof Smart Shuttle. 21 March 2022. Available online: https://www.kelride.com/en/ (accessed on 12 May 2022).
- Bayern, D.R.B. Erste Autonome Buslinie Deutschlands in Bad Birnbach. 19 August 2022. Available online: https://www.badbirnbach.de/geschichten/autonomer-kleinbus (accessed on 28 August 2022).
- EVAShuttle. EVA-Shuttle. 30 May 2022. Available online: https://www.eva-shuttle.de/ (accessed on 15 August 2022).
- mbH. Verkehrsgesellschaft Frankfurt am Main. Autonomer Bus: VGF und Continental Richten Testbetrieb ein. 19 August 2022. Available online: https://www.vgf-ffm.de/de/aktuellpresse/news/einzelansicht/autonomer-bus-vgf-und-continental-richten-testbetrieb-ein (accessed on 15 May 2022).
- International, S. J3016C: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles—SAE International. 18 September 2021. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 25 May 2022).
- Rudschies, W.; Thomas Kroher. Autonomes Fahren: So Fahren wir in Zukunft. ADAC. 4 December 2019. Available online: https://www.adac.de/rund-ums-fahrzeug/ausstattung-technik-zubehoer/autonomes-fahren/technik-vernetzung/aktuelle-technik/ (accessed on 29 October 2022).
- Davis, F.D. User acceptance of information technology: System characteristics, user perceptions and behavioral impacts. Int. J.-Man-Mach. Stud. 1993, 38, 475–487. [Google Scholar] [CrossRef]
- Eden, G.; Nanchen, B.; Ramseyer, R.; Evéquoz, F. Expectation and experience: Passenger acceptance of autonomous public transportation vehicles. In Proceedings of the IFIP Conference on Human-Computer Interaction, Bombay, India, 25–29 September 2017; pp. 360–363. [Google Scholar] [CrossRef]
- Schade, J.; Schlag, B. Acceptability of urban transport pricing strategies. Transp. Res. Part F Traffic Psychol. Behav. 2003, 6, 45–61. [Google Scholar] [CrossRef]
- Schuitema, G.; Steg, L.; Forward, S. Explaining differences in acceptability before and acceptance after the implementation of a congestion charge in Stockholm. Transp. Res. Part A Policy Pract. 2010, 44, 99–109. [Google Scholar] [CrossRef]
- Riener, A.; Appel, A.; Dorner, W.; Huber, T.; Kolb, J.C.; Wagner, H. (Eds.) Autonome Shuttlebusse im ÖPNV: Analysen und Bewertungen zum Fallbeispiel Bad Birnbach aus Technischer, Gesellschaftlicher und Planerischer Sicht; Springer eBook Collection; Springer Nature: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Salonen, A.O.; Haavisto, N. Towards Autonomous Transportation. Passengers’ Experiences, Perceptions and Feelings in a Driverless Shuttle Bus in Finland. Sustainability 2019, 11, 588. [Google Scholar] [CrossRef]
- Aral. 2021. Available online: https://www.de.statista.com/statistik/daten/studie/270596/umfrage/interesse-an-autonomen-fahrzeugen/ (accessed on 15 May 2022).
- Wicki, M.; Bernauer, T. Public Opinion on Route 12 Interim Report on the First Survey on the Pilot Experiment of an Automated Bus Service in Neuhausen am Rheinfall 2018. Available online: https://www.research-collection.ethz.ch/handle/20.500.11850/282577 (accessed on 25 October 2022).
- Thomas, M.; Tiku, D. Reinventing carsharing as a modern and profitable service. In Proceedings of the Intelligent Transportation Society of America, Annual Meeting, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Sperling, D. Three Revolutions: Steering Automated, Shared, and Electric Vehicles to a Better Future; Island Press: Washington, DC, USA, 2018. [Google Scholar]
- Endleman, H.; Wallace, T.F.; Kao, D.; Wallace, B. An Exploratory Review of the Societal Impacts of Automated and Connected Vehicles in Canada, with a Focus on Women and Indigenous Peoples Carleton University. 2019. Available online: http://www.sce.carleton.ca/~wally/2019%2010%2031b%20%20Transport%20Canada%20Report%20AVCV%20Indigenous%20and%20Women.pdf (accessed on 10 January 2020).
- Chen, T.D. Management of a Shared, Autonomous, Electric Vehicle Fleet: Vehicle Choice, Charging Infrastructure & Pricing Strategies. Ph.D. Thesis, University of Texas, Austin, TX, USA, 2015. [Google Scholar]
- Cavoli, C.; Phillips, B.; Cohen, T.; Jones, P. Social and Behavioural Questions Associated with Automated Vehicles. A Literature Review; UCL Transport Institute: London, UK, 2017. [Google Scholar]
- Milakis, D.; van Wee, B. Chapter 4—Implications of vehicle automation for accessibility and social inclusion of people on low income, people with physical and sensory disabilities, and older people. In Demand for Emerging Transportation Systems; Antoniou, C., Efthymiou, D., Chaniotakis, E., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 61–73. [Google Scholar] [CrossRef]
- Currie, G. Lies, damned lies, AVs, shared mobility, and urban transit futures. J. Public Transp. 2018, 21, 3. [Google Scholar] [CrossRef]
- Pakusch, C.; Stevens, G.; Boden, A.; Bossauer, P. Unintended Effects of Autonomous Driving: A Study on Mobility Preferences in the Future. Sustainability 2018, 10, 2404. [Google Scholar] [CrossRef]
- Schuss, M.; Wintersberger, P.; Riener, A. Let’s Share a Ride into the Future: A Qualitative Study Comparing Hypothetical Implementation Scenarios of Automated Vehicles. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- Schuss, M.; Manger, C.; Löcken, A.; Riener, A. You’ll Never Ride Alone: Insights into Women’s Security Needs in Shared Automated Vehicles. In Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seoul, Republic of Korea, 17–20 September 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 13–23. [Google Scholar] [CrossRef]
- Fraedrich, E.; Cyganski, R.; Wolf, I.; Lenz, B. User Perspectives on Autonomous Driving: A Use-Case-Driven Study in Germany 2016. Available online: https://www.core.ac.uk/download/pdf/31023753.pdf (accessed on 15 May 2022).
- Polydoropoulou, A.; Tsouros, I.; Thomopoulos, N.; Pronello, C.; Elvarsson, A.; Sigþórsson, H.; Dadashzadeh, N.; Stojmenova, K.; Sodnik, J.; Neophytou, S.; et al. Who Is Willing to Share Their AV? Insights about Gender Differences among Seven Countries. Sustainability 2021, 13, 4769. [Google Scholar] [CrossRef]
- Lavieri, P.S.; Bhat, C.R. Modeling individuals’ willingness to share trips with strangers in an autonomous vehicle future. Transp. Res. Part A Policy Pract. 2019, 124, 242–261. [Google Scholar] [CrossRef]
- Biermann, H.; Philipsen, R.; Brell, T.; Ziefle, M. Shut Up and Drive? User Requirements for Communication Services in Autonomous Driving. In Proceedings of the HCI in Mobility, Transport, and Automotive Systems, Automated Driving and In-Vehicle Experience Design, Copenhagen, Denmark, 19–24 July 2020; Krömker, H., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 3–14. [Google Scholar]
- Brewer, R.N.; Austin, A.M.; Ellison, N.B. Stories from the Front Seat: Supporting Accessible Transportation in the Sharing Economy. Proc. ACM Hum.-Comput. Interact. 2019, 3. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef]
- Mirnig, A.G.; Gärtner, M.; Füssl, E.; Ausserer, K.; Meschtscherjakov, A.; Wallner, V.; Kubesch, M.; Tscheligi, M. Suppose your bus broke down and nobody came. Pers. Ubiquitous Comput. 2020, 24, 797–812. [Google Scholar] [CrossRef]
- Festerling, J.; Siraj, I. Anthropomorphizing Technology: A Conceptual Review of Anthropomorphism Research and How it Relates to Children’s Engagements with Digital Voice Assistants. Integr. Psychol. Behav. Sci. 2021, 56, 1–30. [Google Scholar] [CrossRef]
- Sanguinetti, A.; Kurani, K.; Ferguson, B. Is It ok to Get in a Car with a Stranger? Risks and Benefits of Ride-Pooling in Shared Automated Vehicles. 2019. Available online: https://www.escholarship.org/uc/item/1cb6n6r9 (accessed on 15 May 2022).
- Bouquet, E.; Mäkelä, V.; Schmidt, A. Exploring the Design of Companions in Video Games. In Proceedings of the Academic Mindtrek 2021, Tampere, Finland, 1–3 June 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 145–153. [Google Scholar] [CrossRef]
- Mayring, P. Qualitative inhaltsanalyse. In Handbuch Qualitative Forschung in der Psychologie; Springer: Weinheim, Germany, 2010; pp. 601–613. [Google Scholar]
- Kuckartz, U. Qualitative Inhaltsanalyse. 2012. Available online: https://www.mda.gesis.org/index.php/mda/article/view/2013.006/0 (accessed on 15 May 2022).
- MAXQDA. MAXQDA: Qualitative Data Analysis Software. 2020. Available online: https://www.maxqda.com/ (accessed on 9 January 2022).
- BGBl. Artikel 1—Gesetz zur Änderung des Straßenverkehrsgesetzes und des Pflichtversicherungsgesetzes—Gesetz zum Autonomen Fahren: StVGuaPflVGÄndG k.a.Abk. Available online: https://www.guides.nyu.edu/QDA/maxqda (accessed on 27 July 2021).
- Dey, D.; Habibovic, A.; Löcken, A.; Wintersberger, P.; Pfleging, B.; Riener, A.; Martens, M.; Terken, J. Taming the eHMI jungle: A classification taxonomy to guide, compare, and assess the design principles of automated vehicles’ external human-machine interfaces. Transp. Res. Interdiscip. Perspect. 2020, 7, 100174. [Google Scholar] [CrossRef]
- Deutscher Bundestag. § 49a StVZO Lichttechnische Einrichtungen, Allgemeine Grundsätze: StVZO. 4 May 2012. Available online: https://www.lxgesetze.de/stvzo/49 (accessed on 15 May 2022).
- Epley, N.; Waytz, A.; Cacioppo, J.T. On seeing human: A three-factor theory of anthropomorphism. Psychol. Rev. 2007, 114, 864–886. [Google Scholar] [CrossRef]
- Pradhan, A.; Findlater, L.; Lazar, A. “Phantom Friend” or “Just a Box with Information”: Personification and Ontological Categorization of Smart Speaker-based Voice Assistants by Older Adults. Proc. ACM-Hum.-Comput. Interact. 2019, 3, 1–21. [Google Scholar] [CrossRef]
- Lopatovska, I.; Williams, H. Personification of the Amazon Alexa: BFF or a Mindless Companion. In Proceedings of the 2018 Conference on Human Information Interaction&Retrieval—CHIIR ’18, New Brunswick, NJ, USA, 11–15 March 2018; pp. 265–268. [Google Scholar] [CrossRef]
- Walters, M.L.; Syrdal, D.S.; Dautenhahn, K.; te Boekhorst, R.; Koay, K.L. Avoiding the uncanny valley: Robot appearance, personality and consistency of behavior in an attention-seeking home scenario for a robot companion. Auton. Robot. 2008, 24, 159–178. [Google Scholar] [CrossRef]
- Mori, M.; MacDorman, K.F.; Kageki, N. The Uncanny Valley [From the Field]. IEEE Robot. Autom. Mag. 2012, 19, 98–100. [Google Scholar] [CrossRef]
- Bartneck, C.; Kanda, T.; Ishiguro, H.; Hagita, N. My robotic doppelgänger—A critical look at the Uncanny Valley. In Proceedings of the RO-MAN 2009—The 18th IEEE International Symposium on Robot and Human Interactive Communication, 27 September–2 October 2009; pp. 269–276. [Google Scholar] [CrossRef]
- Dautenhahn, K.; Woods, S.; Kaouri, C.; Walters, M.; Lee, K.K.; Werry, I. What is a robot companion—friend, assistant or butler? In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1192–1197. [Google Scholar] [CrossRef]
- Eyssel, F.; de Ruiter, L.; Kuchenbrandt, D.; Bobinger, S.; Hegel, F. ‘If you sound like me, you must be more human’: On the interplay of robot and user features on human-robot acceptance and anthropomorphism. In Proceedings of the 2012 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Boston, MA, USA, 5–8 March 2012; pp. 125–126. [Google Scholar] [CrossRef]
- ITF. Women’s Safety and Security—A Public Transport Priority. 2018. Available online: https://www.itf-oecd.org/sites/default/files/docs/womens-safety-security_0.pdf (accessed on 9 January 2022).
- Abouelela, M.; Tirachini, A.; Chaniotakis, E.; Antoniou, C. Characterizing the adoption and frequency of use of a pooled rides service. Transp. Res. Part C Emerg. Technol. 2022, 138, 103632. [Google Scholar] [CrossRef]
- Olaru, D.; Smith, B.; Taplin, J.H. Residential location and transit-oriented development in a new rail corridor. Transp. Res. Part A Policy Pract. 2011, 45, 219–237. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| How Important Do You Consider the Presence of a Human Operator? | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 8% | 16% | 12% | 4% | 8% | 8% | 8% | 16% | 4% | 0 % | 16% |
| How Likely Would You Use the Shuttle Bus without a Human Operator? | ||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 8% | 4% | 0% | 8% | 4% | 8% | 0% | 16% | 16% | 12 % | 24% |
| Which Concept Do You Like the Most? | |||
|---|---|---|---|
| Tele-assistant | Hologram | Chat-Bot | Robot |
| 40% | 30% | 22.5% | 7.5% |
| Which Concept Do You Like the Least? | |||
| Tele-assistant | Hologram | Chat-Bot | Robot |
| 15% | 17.5% | 27.5% | 40% |
| Tele-Assistant | Hologram | Chat-Bot | Robot |
|---|---|---|---|
| 54 | 42 | 40 | 28 |
| How Should a Digital Companion for Automated Shuttle buses Be Designed? | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0 (=male) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 (=female) |
| 7.5% | 2.5% | 0% | 2.5% | 0% | 55% | 5% | 7.5% | 2.5% | 2.5% | 20% |
| 0 (=light) | 10 (=dark) | |||||||||
| 20% | 5% | 20% | 17.5% | 0% | 17.5% | 5% | 5% | 7.5% | 0 % | 2.5% |
| 0 (=naturalistic) | 10 (=futuristic) | |||||||||
| 12.5% | 2.5% | 12.5% | 5% | 0% | 22.5% | 5% | 15% | 10% | 2.5% | 12.5% |
| 0 (=hard) | 10 (=soft) | |||||||||
| 5% | 0% | 2.5% | 2.5% | 7.5% | 27.5% | 20% | 7.5% | 12.5% | 7.5% | 7.5% |
| 0 (=human) | 10 (=imaginative) | |||||||||
| 15% | 10% | 7.5% | 22.5% | 10% | 15% | 2.5% | 7.5% | 7.5% | 0% | 2.5% |
| 0 (=realistic) | 10 (=abstract) | |||||||||
| 20% | 12.5% | 10% | 15% | 2.5% | 20% | 5% | 2.5% | 5% | 5% | 2.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schuß, M.; Rollwagen, A.; Riener, A. Understanding Operator Influence in Automated Urban Shuttle Buses and Recommendations for Future Development. Multimodal Technol. Interact. 2022, 6, 109. https://doi.org/10.3390/mti6120109
Schuß M, Rollwagen A, Riener A. Understanding Operator Influence in Automated Urban Shuttle Buses and Recommendations for Future Development. Multimodal Technologies and Interaction. 2022; 6(12):109. https://doi.org/10.3390/mti6120109
Chicago/Turabian StyleSchuß, Martina, Alice Rollwagen, and Andreas Riener. 2022. "Understanding Operator Influence in Automated Urban Shuttle Buses and Recommendations for Future Development" Multimodal Technologies and Interaction 6, no. 12: 109. https://doi.org/10.3390/mti6120109
APA StyleSchuß, M., Rollwagen, A., & Riener, A. (2022). Understanding Operator Influence in Automated Urban Shuttle Buses and Recommendations for Future Development. Multimodal Technologies and Interaction, 6(12), 109. https://doi.org/10.3390/mti6120109