
“Attention! A Door Could Open.”—Introducing Awareness Messages for Cyclists to Safely Evade Potential Hazards


1
Human–Computer Interaction Group, Technische Hochschule Ingolstadt, 85049 Ingolstadt, Germany
2
Institute for Pervasive Computing, Johannes Kepler University Linz, 4040 Linz, Austria
3
Faculty of Computer Science, Technische Hochschule Ingolstadt, 85049 Ingolstadt, Germany
*
Author to whom correspondence should be addressed.
Multimodal Technol. Interact. 2022, 6(1), 3; https://doi.org/10.3390/mti6010003
Submission received: 5 December 2021
/
Revised: 19 December 2021
/
Accepted: 27 December 2021
/
Published: 31 December 2021
(This article belongs to the Special Issue User Interfaces for Cyclists)
Abstract
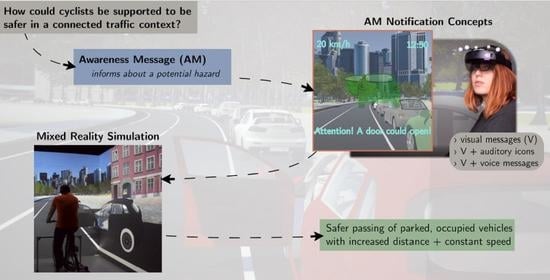
:Numerous statistics show that cyclists are often involved in road traffic accidents, often with serious outcomes. One potential hazard of cycling, especially in cities, is “dooring”—passing parked vehicles that still have occupants inside. These occupants could open the vehicle door unexpectedly in the cyclist’s path—requiring a quick evasive response by the cyclist to avoid a collision. Dooring can be very poorly anticipated; as a possible solution, we propose in this work a system that notifies the cyclist of opening doors based on a networked intelligent transportation infrastructure. In a user study with a bicycle simulator (N = 24), we examined the effects of three user interface designs compared to a baseline (no notifications) on cycling behavior (speed and lateral position), perceived safety, and ease of use. Awareness messages (either visual message, visual message + auditory icon, or visual + voice message) were displayed on a smart bicycle helmet at different times before passing a parked, still-occupied vehicle. Our participants found the notifications of potential hazards very easy to understand and appealing and felt that the alerts could help them navigate traffic more safely. Those concepts that (additionally) used auditory icons or voice messages were preferred. In addition, the lateral distance increased significantly when a potentially opening door was indicated. In these situations, cyclists were able to safely pass the parked vehicle without braking. In summary, we are convinced that notification systems, such as the one presented here, are an important component for increasing road safety, especially for vulnerable road users.
1. Introduction
More and more people are using bicycles as an alternative mode of transportation in recent years [1]. In general, cycling is a healthy activity and has a greener footprint than most other modes of transportation [2]. In addition, it saves time on the way to work, as it is often the faster alternative to the car and removes the hassle of looking for a parking space. Unfortunately, however, bicyclists are involved in numerous accidents every day, and—because bicyclists are particularly at risk as vulnerable road users (VRUs)—many of these accidents have serious or fatal consequences [3]. According to the European Traffic Safety Council [4], 83% of cyclists’ accidents result from an impact with a motorized vehicle, and 2160 cyclists are killed in traffic each year in the EU, which is 8% of the total fatal road accidents. In this regard, “dooring” counts as a widespread hazard for cyclists in the city, primarily because of the high risk of serious injury—if not from an impact with the vehicle door, then often from a secondary collision with other road users [5]. These so-called “dooring” accidents occur when a vehicle occupant fails to check his or her surroundings before opening the door (and the bicyclist also fails to anticipate the door opening).
In order to better protect cyclists in the future, we propose in this work the use of awareness messages (AMs) to inform cyclists of potential door opening accidents. Our system is designed to assist cyclists in passing parked vehicles and enable them to safely avoid opening doors by anticipating them even before they reach the corresponding vehicle. This is a significant improvement over the current situation, where the driver can only react in the short term to the detection of an opening door. Our approach targets a near future in which most vehicles will broadcast information about their current status to other road users using car-to-everything (C2X) communication and Intelligent Transport Systems (ITSs) [6].
We conducted a user study (N = 24) on a mixed-reality bicycle simulator and compared three AMs in the form of visual messages (V), visual messages and auditory icons (V + AI), and visual and voice messages (V + VM) to each other and to a baseline B. User studies investigating cyclist behavior are often conducted in-lab on a bicycle simulator when exploring not-yet-available technology and/or dangerous situations in real traffic, e.g., [7,8,9]. For the visualization of AMs, we considered technologies comparable to in-vehicle head-up displays, intending to reduce the time required to look away from the road to see the messages. In the context of cycling, we refer to a head/helmet-mounted device for cyclists (C-HMD). Our results show that participants had positive attitudes toward the use of C-HMDs with AMs and preferred the concepts and auditory cues (V + AI and V + VM) over purely visual messages (V). In addition, participants significantly increased their lateral distance to parked vehicles when supported by AM notifications.
2. Related Work
2.1. Dooring Accidents
A study of dooring accidents (N = 1000) by the German Road Safety Council in 2020 found that about 45% of participants had almost experienced a dooring accident while cycling, whereas 6% had already been involved in one [10]. Jänsch et al. [11] analyzed data from the German In-Depth Accident Study (GIDAS) between 2000 and 2014. Of the 29,482 cases recorded, 8057 involved cyclists, and in 225 of these cases (3%), cyclists were injured due to dooring. A total of 80% of the dooring accidents occurred when the front left door (driver’s door) opened, 38% with the right front door, and 1% each for rear doors. In 168 dooring cases, cyclists moved with an estimated cycling speed of 15 to 20 km/h prior to the collision. Johnson et al. [12] analyzed dooring accidents involving cyclists in Australia based on police reports (N = 1247) and hospital data (N = 401) between 2000 and 2011, of which 3.1% (hospital) and 8.4% (police) were dooring accidents. In approximately 80% of cases, dooring accidents occurred because the driver opened the door. In the other cases, the occupants opened a door, sometimes even when the vehicle was on the roadway and not parked.
Sufficient space is important to enable safe cycling and to reduce the risk of accidents for cyclists, especially in urban traffic—as the following statement confirms: “[Cyclists] should not be expected to stay close to the nearside kerb at all times. Adequate width should be provided for overtaking other cyclists, to be passed safely by motor vehicles, and for cyclists to deviate around road defects, debris, and other hazards” [13]. In order to prevent collisions with an opening door, cyclists should maintain a “door-wide” distance from parked vehicles, which can vary greatly depending on the type of vehicle. The prevention of such accidents is actually the responsibility of the vehicle occupants. The Vienna Convention on Road Traffic [14], for example, states in Article 24: “it shall be prohibited to open the door of a vehicle, to leave it open, or to alight from the vehicle without having made sure that to do so cannot endanger other road-users”. This convention has currently been ratified by 84 countries (as of August 2021). Similar regulations exist in Canada, e.g., Highway Traffic Act rule 169 [15], or in Australia (e.g., [16]).
A precaution for vehicle drivers to avoid dooring is the “Dutch Reach” [17]: when reaching for the door with the opposite hand, the upper body and head move toward the door, reminding drivers to do a shoulder check before exiting. To prevent dooring accidents, researchers proposed in-vehicle warning systems that detect approaching cyclists using omnidirectional cameras mounted on top of the side mirror [18] or a rear-view fish eye camera mounted at the height of a car’s C pillar [19]. Another possible solution is to physically separate and designate bike lanes [20] to ensure that cyclists have enough space to pass safely. However, this is not always feasible in urban areas.
We agree that the responsibility to prevent dooring from happening lies with the vehicle occupants. However, we argue that notifying bicyclists of potential dooring will improve their situational awareness and make them feel safer when passing parked vehicles. The above-mentioned solutions only inform vehicle occupants of the potential danger of dooring an approaching cyclist. We assume that with assistance through AMs, cyclists would be able to avoid a potential door opening in a more controlled manner, rather than only when they notice a door opening. We predict that with our approach, cyclists would increase their lateral distance to a safe distance earlier when passing an occupied vehicle.
2.2. Hazard Notifications
Since we are not aware of any standards on hazard notifications for cyclists, we will resort to vehicle standards.
2.2.1. Definition of Hazard Notifications
In ISO 18682 [21], which deals with external hazard detection and notification systems for ITSs, hazard notifications are classified as either warnings or AMs, depending on the expected reaction of the driver. If an imminent avoidance maneuver is expected, the driver is informed by a warning. If a hazard is highly likely to occur in a short time in the future, this is conveyed by an AM to prepare the driver to avoid the hazard. We consider our proposed notifications as AMs as they can only inform cyclists about the possibility of a dooring accident due to the unpredictability of when a door will open.
ISO/TR 12204 [22] provides guidance on warning signal integration in automobiles and further classifies warning signals depending on criticality, urgency, signal duration, and hazard direction. As cyclists are VRUs, we must assume that they likely suffer severe injuries in accidents with motorized vehicles. To safely evade a potential hazard, cyclists must consider their surroundings before taking evasive action to avoid secondary impacts with other traffic participants, e.g., evading an opening door while the following vehicle overtakes the cyclist. Therefore, cyclists should be notified early on when approaching a potential hazard and, if possible, be given a few seconds to prepare for evasive action. In addition, the notification should be canceled after passing the hazard, and notifications should also convey the direction of the hazard to allow for a more intuitive understanding of the situation.
We estimate that notification systems for cyclists can be designed with these standards in mind but probably need to be reconsidered and adapted accordingly.
2.2.2. Hazard Notifications for Cyclists
Matviienko et al. [7] investigated multimodal warnings intended to make children more aware and prepared for critical situations in a bike simulator user study (N = 24). They looked at two situations: (1) vehicles approaching from the left or right at a junction, and (2) vehicles taking off from a parking spot hidden behind a bush. In the first situation, they notified the children of the vehicle via directional cues and prompted a follow-up cue indicating them to brake immediately if the situation could result in a collision. In the latter situation, they received a signal for immediate braking. The authors discovered that unimodal cues are more suitable to indicate directions, but multimodal cues should be used when immediate actions are required. Further, using trimodal warnings leads to shorter reaction times and better understandability. Their work is concerned with warnings of a hazard that requires immediate action, i.e., braking by the cyclist. Our research focuses on potential threats to the bicyclist and on how to alert the bicyclist to the potential hazard in a timely manner. The intention is that the cyclist can respond to the hazard and consider his or her surroundings if the hazard does occur. An occupied vehicle does not pose a threat to cyclists unless doors are opened when the occupants exit the vehicle, or when the vehicle departs.
In a virtual reality bicycle simulator study (N = 85), von Sawitzky et al. [8] explored visual notifications (traffic augmentation, smart bicycle path, and a warning hint) displayed on an HMD to make the crossing of intersections safer via ITS. They found that enriching notifications with additional information about the situation, in this example by adding traffic augmentations or indicating whether it is safe to cross (smart bicycle path), were perceived as more valuable information than only getting notified about a crossing with traffic ahead. In addition, the notifications must be presented in a way that they are easy to understand.
Still, in their study, they only used visual representations for notifications. Their participants proposed to also include notification sounds to make them aware of the incoming message. In our work, we explore how the combination of visual and auditory cues integrated into a C-HMD can be used to facilitate notifications about the potential of a hazard ahead.
Recently, more and more safety gadgets have become available for the everyday cyclist. Garmin [23], for example, distributes an on-bike rear-view radar with an integrated tail light issuing visual and auditory notifications when vehicles approach from behind. Additionally, cycling glasses with integrated displays, e.g., [24,25], provide visual information for navigation, current velocity, heart rate, calorie outtake, etc. Those systems could be utilized to provide hazard notifications in the future.
2.3. Connected Traffic
With our approach, we address a support system for cyclists which could be realizable in the near future with technologies such as 5G that will enable connected traffic and allow for real-time data sharing [26]. A large scope of work addressing road safety in a connected traffic context focuses on in-vehicle notification/warning systems for driver–passengers of automated vehicles (AVs) (e.g., [27,28,29,30]) or on how AVs can communicate their intentions to VRUs, especially pedestrians (e.g., [31,32]). Popular means of interacting with VRUs include external human–machine interfaces (eHMIs, e.g., [32,33]).
VRUs must be in proximity of the AV to perceive and interact with the eHMI, which seems like a natural interaction for pedestrians, but may not be appropriate for bicyclists in all cases. Cyclists travel at much higher speeds than pedestrians and share lanes with vehicles. They are unlikely to focus on the eHMI of every surrounding vehicle (assuming every vehicle has an eHMI) and may be overwhelmed by the sheer flood of information.
Our work differs from the approach of vehicles communicating their intentions to VRUs via on-vehicle eHMIs and aims to provide VRUs, particularly cyclists, with relevant information about potential hazards on their path. Connected traffic does not necessarily mean that vehicles must be automated. We anticipate that support systems for cyclists that leverage connected traffic technologies will be realizable much sooner than fully automated vehicles.
Another question that arises is whether connected traffic support systems for cyclists will be needed at all in the future. Berge et al. [34] conducted an interview study (N = 30) on the need for HMIs for cyclists in an automated traffic context. Participants were more hesitant about using HMIs for communication, as they felt that the responsibility for safety would be imposed on them. However, they would be interested when the systems improved their safety. The authors noted that further research should be conducted on the acceptability of HMIs for cyclists. Our study only assumes that all vehicles are connected and not that all vehicles are automated. Therefore, we argue that users would be more willing to use AMs because there is no system that manages all the motorized traffic. In our opinion, the responsibility for safety should still lie with the motorized vehicles, i.e., the party that poses a threat due to neglecting their duty of care.
3. Research Methodology
In this paper, we examine awareness messages (AMs) intended to notify cyclists of a potential hazard, i.e., opening doors, in a user study on a bike simulator. Our intent is to provide cyclists with the knowledge of potential dooring accidents along their path so that they can avoid opening doors in a controlled manner with additional time to consider their surroundings rather than reacting to the sight of an opening door.
To be able to provide AMs about a potential door opening, it is necessary to know whether a vehicle along the cyclist’s path is occupied and on which side occupants could exit. For this study, we assume that a connected traffic service will provide this information. This information could already be accessed today since most vehicles detect whether a seat is occupied through weight sensors and notify the occupants if they have not fastened their seat belts. As long as the vehicle is not locked, all control units of the vehicle are still functional.
3.1. Awareness Message Concepts
Uni- and multimodal notification systems have already proven helpful in other domains using various techniques for various goals, including safety. Aviation notification systems, for example, utilize 3D spatial sound [35] or auditory icons [36]. In the driving domain, researchers investigated different modalities for, e.g., forward collision warnings [37], take-over requests in automated vehicles [38], or looked at head-up or windshield displays to notify drivers about surrounding traffic [28] or to convey warnings [39]. We hypothesize that notifications can also prove helpful in the field of cycling to increase situational awareness and support cyclists to feel safer on the roads.
3.1.1. Message Structure and Timing
To notify the cyclist about a potential door opening, we used four subsequent messages: (1) an incoming message indicating that a parked, occupied vehicle is immediately ahead, (2) messages and (3) providing the distance to end of the vehicle, and (4) message informing the cyclist that they have passed the potential threat. When approaching an occupied vehicle, messages were displayed in a time-based manner. ISO/TR 12204 [22] recommends a time frame of 3 to 10 s for in-vehicle messages in situations requiring no immediate reaction but that do require a short-term reaction. Potential door openings fall into this category because the bicyclist needs to be notified before they reach the vehicle to prepare to swerve in case the door is opened. For our study, we chose a message sequence of messages displayed at 9, 6, and 3 s before passing the parked vehicle, and a message when passing the vehicle. The first three messages notify the cyclist of the danger ahead and the last one that they passed the vehicle. As a reference point, we used the position at the front wheelbase of the vehicle with an 0.5 m offset to the left side of the vehicle.
3.1.2. Visual Representation
The visual messages were the same for the three concepts (see Figure 1). showed a centered green-colored and transparent icon of a car indicating the direction of the hazard with the door opened to the side where the cyclists are passing (in this study, the cyclist passed on the left side). A text below stated, “Attention! A door could open!”. In the following message (), the icon color changes to orange, and the text displays the distance to the vehicle in meters. For , the icon changes to red, and the distance is updated. After passing the vehicle, message indicates that the “Danger is over!”. AMs to were displayed until they were replaced by the following message, and was shown for 2 s. We changed the icon color to visually indicate approaching a parked vehicle. In the MR study, participants wore a C-HMD (mimicked by a Microsoft HoloLens 2) that delivered screen-fixed information so that the visual message remained visible regardless of the viewing direction.
3.1.3. Combination with Auditory Cues
Auditory cues can be used to draw attention to look at a visual warning for more information. Commonly used auditory cues when operating a vehicle include speech, e.g., auditory icons or earcons, to convey warnings or to draw attention. ISO/TR 12204 [22] defines auditory icons as an “auditory signal that represents an event or action without using verbal expression [, which] can be a synthesized sound that gives the impression of a specific event or a recorded sound from everyday life”. Auditory icons can be considered as representational earcons that digitize natural sounds, while synthesized tones are defined as abstract earcons [40]. Other types of auditory representations are lyricons, combining lyrics and earcons [41], or spearcons. Spearcons (speech-based earcons) were introduced by Walker et al. [42] for menu-based interfaces and are generated by “speeding up a spoken phrase until it is no longer recognized as speech”; spearcons have the advantage to be acoustically unique. Šabic et al. [43] found out (based on two experiments on in-vehicle warnings, N = 60, N = 60) that spearcons performed better than text-to-speech warnings in quiet environments and similar in noisier environments, but recommended using text-to-speech for safety-critical warnings in potentially noisier environments.
Compared to auditory icons, people can explicitly associate spoken words with the information conveyed. However, a disadvantage of spoken messages is that it takes longer to convey them to the user—auditory icons can be perceived much faster but need to be decoded to be understood [44]. Here, we investigated whether a combination of visual and auditory cues would be more useful for hazard notifications for cyclists. For this purpose, we looked at auditory icons and voice messages. In this study, we will examine abstract earcons, but we refer to them as auditory icons to comply with ISO/TR 12204.
Thus, the representation for visual message and auditory icons additionally provided a beep for an incoming message for , a single beep for , a double beep for , and a cancellation beep (). The auditory icons’ waveform and spectrogram are displayed in Figure 2a,b, respectively. The text displayed below the car icon is read out by a text-to-speech engine for visual and voice messages.
3.2. Hypotheses
We are interested in how AMs affect cycling speed and lateral distance to the parked vehicles and how cyclists perceive such support systems in terms of usability and perceived safety. To do so, we compared the three above-introduced concepts, V, V + AI, and V + VM, which relay AMs to the cyclists to a baseline ride (no notifications) in a within-subject design study on a bicycle simulator. In this paper, we examined the following hypotheses:
Hypothesis 1 (H1).
Awareness messages for potential dooring accidents allow cyclists to maintain a similar speed during active notifications when passing parked vehicles that could pose a hazard;
Hypothesis 2 (H2).
To avoid potential dooring, cyclists increase their lateral distance to the parked vehicles earlier with awareness messages than without;
Hypothesis 3 (H3).
The use of a dooring accident notification system increases the perceived safety of cyclists and can support cyclists in accident prevention;
Hypothesis 4 (H4).
Visual messages and auditory icons are the preferred concept, as this type of representation is more usable and catches the user’s attention better than only visual messages or visual and voice messages.
For H1, we anticipate that cyclists maintain their speed due to AMs being non-distracting. Related work on phone usage while cycling by de Waard et al. [45], for example, investigated the impact of hands-free phone usage while cycling and figured that this mode led to a significant speed reduction. Thus, they concluded that the hands-free mode did not provide a safe alternative to handheld phone usage while cycling. Their findings further revealed that there was no significant difference in workload between handheld and hands-free phone usage, but the workload scores were quite high for both modes. We presume that focusing on the device resulted in a higher workload and thus a decrease in cycling speed, as cyclists had to shift their mental capacities to the phone.
For the remainder of this paper, we have made a few assumptions: after passing the vehicle, we anticipated that cyclists return to their previous distance. We expected the lateral distance to increase earlier for rides with AMs than without. We further predicted that an increased lateral distance without an AM system (baseline) would only happen if a door opens.
3.3. Apparatus
The simulation environment was developed with Unity 3D. The study was conducted in a CAVE, a 3 m × 3 m × 3 m cube with four projection sides. A bicycle (fixed in a roller trainer) was positioned in the CAVE, facing the front side, see Figure 3. The bike was equipped with a tracker for the handlebar angle, measured via ART DTrack, using four infrared cameras (resolution; 0.9 MPx, frequency: 90 Hz). A Bluetooth IMU measured the angular speed of the rear wheel (Mbient MetaMotionR+, framerate: 100 Hz, resolution: 2000°/s, measuring speeds up to 50 km/h for a wheel line of about 2.25 m).
We used a Microsoft HoloLens 2 to mimic a C-HMD and equipped it with trackers so as to be trackable by ART DTrack (for head tracking). The notification application (also Unity 3D) used Google Remote Procedure Calls (GRPC) and ProtoBuf [46] to communicate with the main simulation PC that triggers the messages. We used the TextToSpeech engine from HoloToolkit (v2017.4.2.0) for voice output, as its successor MRTK Toolkit did not include one when we implemented the study. During the baseline ride, participants wore tracking glasses to enable head tracking. The cyclist’s position is shared from the main simulation PC via GRPC and ProtoBuf to the instances running on the eight CAVE PCs.
3.4. Track Design and Door Openings
We implemented four tracks, each about 1.2 km in length. Each track followed the same route, with parked vehicles (75 per track, 40 in the baseline) distributed on different positions to prevent learning effects. The two-way street consisted of a sidewalk (3 m width), a bike lane (1.5 m), two lanes (total 6 m), and a parking lane (2.3 m), followed by another sidewalk. The route mimics a right-hand suburban road with an accompanying parking lane. Participants cycled on the lane next to the parked vehicles without moving traffic. For higher immersion, we played back sounds of chirping birds and light traffic in the background.
For a higher realism, we orchestrated three different types of door openings: (1) a door opened while the cyclist was still too far away to collide with it (non-critical opening), (2) a critical opening that could result in an accident, and (3) no door opening while the cyclist passes. For non-critical openings, the door opened about 6 s before passing the vehicle (at the time point where is issued). Critical openings occurred a second after receiving (about 2 s before passing the vehicle) to mimic potential collision risks so that the cyclists would have to evade immediately if not notified. We used a door opening-to-closing time of four seconds for comparability.
3.5. Questionnaires and Measurements
Before the first ride, we queried the users’ age, gender, cycling experience, risk assessment of dooring accidents, experience with VR and computer games, and Affinity to Technology Interaction (ATI) [47]. We also inquired about the participants’ general perceived safety (7 items, regarding anxiety, confidence, general safety, having control in a situation, and riskiness) and perceived safety after experiencing a ride with potential door openings (13 items addressing factors we assumed impacted perceived safety, such as risk assessment, well-being, comfortability, the capability to handle the situation, and situational safety). To the best of our knowledge, there is no questionnaire yet available covering all of these aspects. Furthermore, we used the six items for perceived safety of the vehicle technology acceptance model (CTAM) [48]. The CTAM was designed as a context-related acceptance questionnaire and addresses determinants related to vehicles. It is based on the Unified Theory of Acceptance and Use of Technology (UTAUT) model by Venkatesh et al. [49], aiming to explain users’ intentions to use an information system as well as the subsequent usage behavior. Osswald et al. [48] additionally introduced the aspects of anxiety and perceived safety in CTAM. We further used the raw NASA-TLX questionnaire [50] to measure the participant’s workload during rides. All items were rated on a 7-point Likert scale unless otherwise noted.
In a semi-structured interview following the completion of all rides, we assessed the participants’ preferences concerning whether they would consider using C-HMDs providing AMs while cycling and which concept was more appealing to them. Further, we assessed how they perceived the timings of the messages.
We recorded the cyclist’s position and speed during each ride to assess the impact of AMs on the cycling behavior. One common indicator that a driver is not distracted and is focused on the driving task is that they are maintaining their traveling speed. We assume that—when the proposed AM systems are used—they do not impact cycling behavior negatively, i.e., by distracting the driver and impacting traveling speeds. An often-used measure for driving performance is the Standard Deviation of Lateral Position (SDLP), which can further be used to derive driver distraction [51].
3.6. Study Procedure
Figure 4a depicts the procedure and also includes an exemplary overview of the progression along the track in Figure 4b. During the briefing, we informed the participants about the content and procedure of the study. We told them that they could stop the study at any time and, in particular, that they should stop if they felt uncomfortable. After reading and signing a consent form, they filled out the demographics questionnaire.
We conducted our user study as a 4 × 3 within-subject design on a mixed-reality bicycle simulator, with the factors concepts (B, V, V + AI, V + VM), and considered door opening types (non-critical, critical, not opening). On each track, a fixed number of AM notifications were issued. When supported by an AM system, nine vehicles were occupied; on the baseline track, six vehicles were occupied. The order of door openings was randomized over the conditions but consistent per condition so that, in three subsequent notifications, all three door openings occurred once. In case of a dooring collision, participants were notified by a crash sound, and the movement froze; after a crash, participants would be encouraged to continue cycling.
The participants were reminded to cycle as they usually would and to obey the right-hand driving law. Then, they started with the familiarization/baseline ride. The first third of the baseline ride was intended to familiarize the participants with the bicycle simulator on an empty street. Upon completion, they answered the post-ride questionnaires assessing workload, perceived safety, usability and intuitiveness.
In the next step, participants put on the HoloLens 2 glasses, which we used to mimic a C-HMD, and were guided through the calibration procedure. After starting the application, they took a seat on the bike simulator. They completed three more rides (the three concepts in randomized order) and the post-ride questionnaires. Auditory feedback was played back by the HoloLens 2 with a medium volume setting (60/100).
After completing all rides, participants filled out questionnaires regarding simulator and motion sickness and rated the experienced systems by the preference of usage. After a semi-structured interview, the participants were dismissed.
Each ride took about 5–6 minutes to complete, the whole study taking about 70 min per participant. Study participation was voluntary.
4. Results
This section provides the results of our analysis using IBM® SPSS® Statistics, Version 26 [52] and R [53]. Detailed descriptive and test statistics for post-hoc tests are available in supplementary materials or upon request from the corresponding author. For all pair-wise comparisons, we report Bonferroni-corrected p-values for comparison to a 0.05 -level.
4.1. Participants
In total, 24 individuals voluntarily participated in the study. Two participants did abort the study during familiarization due to simulator sickness. Of the remaining participants, seventeen were male and five were female and were aged 18 to 40 years (M = 26.73, SD = 5.76). They were either university staff (5), students (11), or employed in industry (6). Six of the participants stated that they cycled sometimes, five that they cycled once per week, ten stated that they cycled daily, and one cycles more than once a week but not every day. They cycle in their free time (18), to commute to work/university (16), and for exercise (4). The results regarding familiarity with VR and computer games, ATI, and the subjects’ perceived risk of encountering dooring are listed in Table 1. During our study, no participant collided with an opening door. The cycling behaviour analysis is based on the data of only seventeen participants, as five participants’ data had to be excluded due to technical issues.
4.2. Cycling Behavior
We analyzed the effect of AM notifications for potential door openings on the lateral distance to the right lane boundary (RLB, road markings between the cyclist’s and the parking lane) and cycling speed.
In each track with an AM system, nine vehicles were occupied, during B six. For the evaluation, only the last six occupied vehicles were considered (resulting in two measures for each door opening type).
4.2.1. Lateral Position Mapping
To obtain the lateral position of the cyclists, we projected the recorded 3D position points onto the RLB (represented by vertices describing the RLB in the 3D model of the road) by step-wise calculating the normal defined by two consecutive points on the RLB ( and , going through ) and applying this normal to the current position-point to calculate the intersection with the line . The distance between and the intersection are used as the lateral distance to the RLB for this specific position. As the track was flat, we could ignore the elevation value of the position. The position data was recorded in reference to the saddle of the bike, which had an offset of 1.1 m to the front of the bicycle).
4.2.2. Lateral Position during Active Awareness Messages
Figure 5 displays the lateral position (LP) profile per condition and door opening type. For better visualization, and to enable a holistic assessment of the LP during AMs, we subdivided the recorded position data into intervals based on the time points where the four AMs were issued to the cyclists (9, 6, 3, and 0 s) and added an additional limit between these AMs, resulting in intervals of quasi-1.5 s lengths (measured based on current cycling speed and distance to the vehicle). We further considered an interval before the first and after the last AM in the notification sequence. Those limits resulted in eight considered intervals labeled from i1 to i8, with i1 between 10.5 and 9 s, i2 between 9 and 7.5 s, etc. to passing the vehicle.
In a visual inspection of the average LP profiles, we see that the baseline (B) condition reflects the expected behavior when encountering door openings without being informed about them beforehand. An increase of LP occurs only when noticing a door opening, and no further increase of distance occurs when no door is opening.
The evasion behavior with AM appears similar for the three AM concepts, where for critical door openings, the average LP increases at about the point when m3 is issued (between i5 and i6, at about 4.5 to 1.5 s). For non-critical door openings, the behavior with AMs is similar to B, except for the average LP being higher than for B, which would allow safe swerving away from large vehicle doors (~1.5 m).
The average behaviors of riders with AMs seem to be similar to each other. Based on the visual inspection, we can not predict the differences between these concepts.
4.2.3. Standard Deviation of Lateral Position
The SDLP measurement is usually applied to judge vehicle driver distraction [51]; the more distracted drivers are, the more their LP deviates, as they are not able to concentrate fully on remaining in the lane. Thus, in general, a higher SDLP value can be interpreted as a higher level of distraction. However, in the context of this study, we do not apply this measurement to examine whether the cyclist is keeping their “ideal lane”, we use it, rather, as a measure of increased LP.
We calculated the SDLP for position data where an AM sequence was active and considered all 12 combinations of AM concepts and door opening types regarding the participants’ respective average lateral distance during this time period. For this, we used the following formula:
with lateral position at data points dp in the interval (1,n) and the mean lateral position (MLP) over this interval.
As the majority of SDLP datasets were not normally distributed (Shapiro–Wilk tests), we tested for differences using the non-parametric omnibus Friedman and the Wilcoxon signed-rank test. Test descriptives are listed in Table 2. Friedman’s test showed a main effect between door opening type (p = 0.045, = 6.206) and an interaction effect for door opening type * condition (p < 0.001, = 35.715). There was no main effect for condition (p = 0.119, = 5.547). The pair-wise comparisons indicate, for the main effect of door opening type, that SDLP during critical door opening was significantly higher than for no door opening (p = 0.021, Z = −2.701). For the interaction effect of condition*door opening type, the following comparisons were statistically significant: at critical door openings, the SDLP for B was significantly lower than V + AI (p = 0.026, Z = −2.722) and V + VM (p = 0.026, Z = −2.722). At B, SDLP for non-critical door opening was significantly higher than critical (p = 0.008, Z = −3.006) and no door opening (p = 0.004, Z = −3.243). At V + VM, SDLP for no door openings was significantly lower than for critical ones (p = 0.003, Z = −3.337).
4.2.4. Cycling Speed
We hypothesized that during the usage of the AMs, the cycling speed stays constant, as we assumed that the systems were not distracting the cyclist.
To analyze the cyclist’s speed behavior, we smoothed the recorded speed data as a sinusoidal curve, and overlaid them due to the pedaling movement. We applied a Savitzky–Golay finite impulse response (FIR) smoothing filter [54] (MATLAB Signal Processing Toolbox: sgolayfilt; input data: speed, order: 1, framelength: 101). Figure 6 shows an extract of the recorded speed data and smoothed speed data.
We assumed a speed change of ±5% (e.g., ±1 km/h at an average speed of 20 km/h) as still maintaining speed. Our participants’ average driving speeds (over the complete track) ranged from 13.1 to 24.6 km/h (M = 18.3 km/h, SD = 2.7 km/h).
For the statistical analysis, we transformed the speed data to a percentage deviation of the average mean during active AMs.
with interval limits l. We considered three intervals restricted by the four AMs of each sequence; hence, the speed values were between AM and , between and , and and , which we will refer to as m(1,2), m(2,3), and m(3,4), respectively. We only considered the effect of the AM concepts on speed, and did not account for different door opening types, as we wanted to assess the general effect of using the concepts.
Null hypothesis testing (NHST) for differences was insufficient because we wanted to know if the velocity remains significantly the same. A non-significant hypotheses test alone does not imply that the data can be assumed to be equal. For this purpose, Lakens et al. [55] established the two one-sided tests (TOST, available for R in the TOSTER package). We applied the pair-wise TOST with raw upper and lower points set to 5% (to allow for maximum speed changes of 5% of the mean speed). For test statistics and a plot of the mean percentage speed deviation, see Table 3 and Figure 7.
Based on the equivalence test and the null-hypothesis test combined, we can conclude that the cycling speed is statistically not different from zero and statistically equivalent to zero during potential door openings while using the concepts V and V + VM; this is also the case for B when comparing m(1,2) and m(2,3), and for V + AI for m(2,3) and m(3,4). For V + AI for the comparison of m(1,2) and m(2,3), the TOST test was not significant; however, the NHST was also not significant. For B between m(2,3) and m(3,4), the speed is significantly equal according to TOST, but also significantly different for NHST. Thus, we cannot make a clear statement about the speed behavior for both cases.
4.3. Motion/Simulator Sickness
Cronbach’s alpha was sufficient for the SSQ subscales ( ≥ 0.727). The SSQ scores for nausea (M = 26.02, SD = 22.84), oculomotor (M = 25.84, SD = 27.25), disorientation (M = 46.19, SD = 56.90), and total score (M = 35.36, SD = 35.38) were calculated by summing up and weighting them with the corresponding factors according to Kennedy et al. [56]. The total score is quite low (35.36, compared to the maximum possible total score of 235.6). Moreover, for the MSSQ, the subscales “as a child” ( = 0.870), “in the last 10 years” ( = 0.831), and total score ( = 0.915), Cronbach’s alpha was sufficient. The motion sickness susceptibility scores (calculated according to Golding [57]) were relatively low in regards to “as a child” responses (M = 6.05, SD = 6.21) and were even lower for “in the last 10 years” (M = 3.75, SD = 3.81), with a total MSSQ score of 9.80 (SD = 9.12, the maximum possible total score is 54).
4.4. Perceived Safety and Workload
The responses on the participants’ general perceived safety showed that our participants are quite confident (M = 5.05, SD = 1.25) and not quite anxious (M = 3.14, SD = 1.67); also, they did not feel anxious quickly (M = 2.73, SD = 1.35). They mostly want to be in control of their actions (M = 5.18, SD = 1.68), do not like uncertainty (M = 5.73, SD = 1.28), are not too afraid of taking risks (M = 3.36, SD = 1.47) and do not really feel too safe in unfamiliar situations (M = 3.91, SD = 1.41).
The Friedman test revealed a difference between all four conditions for the item “I felt competent” (p = 0.006) and between the concepts for the item “I can use the system without looking at it.” (p = 0.020). The post hoc Wilcoxon test revealed that participants rated to feel significantly more competent while using V + AI (M = 6.18, SD = 0.80) notifications than none (B, p = , M = 5.59, SD = 1.14, for comparison: V: M = 6.00, SD = 0.98, V + VM: M = 5.91, SD = 0.81). Further, participants rated that the concepts V + AI (p = 0.040, M = 5.32, SD = 1.21) and V + VM (p = 0.015, M = 5.64, SD = 1.40) were more usable without looking at the notification than when using V (M = 4.14, SD = 1.91). We did not find any differences in workload.
Our results showed a significantly increased feeling of competence when using the notification system V + AI compared to using none (B). Still, the average feeling of competence was rather high for all conditions (over 5.5 on a 7-point scale). Further, it was significant that V + AI and V + VM could be used without looking at the visual content, which is rather obvious as both systems also convey notifications via audio and do not rely only on visual representation, as V does.
4.5. User Experience and Intuitiveness
The reliability test results show valid Cronbach’s alpha values for the subscales of the UEQ (hedonic, pragmatic, and total quality, all greater than 0.873) and INTUI scale (gut feeling and effortlessness, all greater than 0.672) for each condition type. For median values and interquartile range, see Table 4.
The Friedman test showed significant differences for UEQ’s subscale pragmatic quality (p = 0.007, = 9.951), but no significant differences for its semantic pairs “obstructive/supportive” (p = 0.225, = 2.981), “complicated/easy” (p = 0.477, = 1.480), “inefficient/efficient” (p = 0.061, = 5.585) and “confusing/clear” (p = 0.284, = 2.520). Significant differences were found for hedonic quality (p < 0.001, = 25.811), and its semantic pairs “boring/exiting” (p = 0.019, = 7.962), “not interesting/interesting” (p = 0.001, = 13.500), “conventional/inventive” (p = 0.025, = 7.37), but not for “usual/leading edge” (p = 0.218). Differences were also significant for overall quality (p < 0.001, = 23.008). The Friedman test showed significant differences for the INTUI subscales effortlessness (p = 0.004, = 11.121), but not for gut feeling (p = 0.125), and the item intuitiveness (p = 0.397).
The post hoc Wilcoxon test revealed that concept V + AI was rated significantly higher than V regarding pragmatic (p = 0.036, Z = 0.2.513, r = 0.268), hedonic (p < 0.001, Z = 4.993, r = 0.532), and overall quality (p < 0.001, Z = 5.216, r = 0.393). Additionally, V + VM was rated higher than V for hedonic (p < 0.000, Z = 4.318, r = 0.460) and overall quality (p = 0.010, Z = 2.942, r = 0.222), but not for pragmatic quality (p = 2.083). When comparing V + AI and V + VM, V + AI was rated significantly higher for pragmatic quality (p = 0.029, Z = 2.583, r = 0.275) but not for hedonic (p = 0.902) and overall quality (p = 0.827). For the hedonic quality’s semantic pairs, V + AI was rated significantly more exiting (p = 0.015, Z = 2.801, r = 0.597), more interesting (p = 0.024, Z = 2.652, r = 0.565), and more inventive (p = 0.024, Z = 2.652, r = 0.565) when compared to V. In addition, V + VM was rated as more interesting than V (p = 0.012, Z = 2.887, r = 0.615), but not as more exiting (p = 0.392) or inventive (p = 1.082). The Wilcoxon test further revealed no significant differences for the relation of V + AI and V + VM in terms of excitement (p = 0.289), inventiveness (p = 2.116), and interest (p = 0.212). For the INTUI scale effortlessness, the analysis showed that the usage of V + AI (p = 0.025, Z = 2.642, r < 0.01) and V + VM (p = 0.002, Z = 3.342, r < 0.01) was perceived as requiring less effort than using V.
4.6. Semi-Structured Interviews
Interviews were conducted in English (9) or German (13, translated to English) language. The statements were analyzed through a thematic analysis of the responses to the open questions.
4.6.1. Preferred AM System
Eleven participants would prefer to use concept V + AI (P6, P7, P8, P11, P16, P17, P18, P19, P21, P23, and P24), nine V + VM (P2, P3, P5, P9, P10, P12, P14, P15, and P20), and two would use either of these (P4 and P22).
4.6.2. Timings of the AMs
Fourteen participants stated that the timing was perceived appropriate (P2, P3, P5, P9, P11, P14, P15, P17, P18, P19, P20, P21, P22, and P24) and allowed them to consider their surroundings before evading the potential danger (P2, P11, and P20). For some, the first message was timed too early (P4, P8, P10, and P12). It was suggested to skip the first message (P8 and P12), or to provide only one AM about 3–5 s (P10) before reaching the car door. Timings should further be adaptable to the user’s needs, e.g., due to age-dependent reaction times (P18).
4.6.3. Warnings for Multiple Hazard Notifications
If C-HMDs were to support different hazards, participants suggested using a combination of voice messages and auditory icons (P10), displaying specific information about the hazard with an additional visual message with auditory icons (P8, P10), or assigning different beeps for different hazards, similar to assigning phone ringtones to specific people (P11, P16, P17). P24 stated that “when [C-HMDs] contain multiple features [for hazard notifications], the same auditory icons could be used with additional visual icons that display what the warning is about.” P18 was concerned about notifications about two occupied vehicles in close sequence.
4.6.4. Attitude towards Using C-HMDs
A majority of our participants liked the idea of using C-HMDs for accident prevention (P4 to P7, P9 to P12, P14, P18 to P24), but two participants did not (P3, P8). P8 stated that “you can just playback a beep sound from the bike and indicate warnings with LEDs on the tachometer” and mentioned that such a system might be unusable in winter when the display fogs up. The possibility of the C-HMD shattering in an accident (P2, P4), too high of a demand on the user’s perception (P3), or the discomfort of being tracked by the system (P7) could keep people from using C-HMDs. A small, lightweight form factor (P10, P19, P22) and more transparent visualizations (P18) would be desirable. C-HMDs have potential if they support multiple hazard types (P5, P12), but will likely require some time for the user to become accustomed to them (P14). Regarding the connected traffic integration, P21 mentioned, “I think it is a good idea, especially when they [C-HMDs] communicate with cars, then for sure the roads can get safer”.
5. Discussion
The aim of this research was to obtain insights into whether awareness messages (AMs) pointing out potentially dangerous hazards could be introduced as a measure to improve cyclists’ safety in an urban context. For this, we conducted a first initial study where we looked at potential dooring accidents and used AMs to notify the cyclists about them.
5.1. Impact of Awareness Messages on Cycling Performance
Our analysis shows that for the baseline rides (see Figure 5b, plot B), the distance at critical and non-critical openings began to increase as soon as a door opened, but not when the door did not open. When using the AM systems, we discovered that cyclists already increased their LP to parked vehicles before receiving notification . On average, the LP i7 (when passing the vehicle) was highest, from which we can derive that the three AMs systems show a positive impact on LP for safer passing outside of the “dooring zone”. This finding further confirms that when using an AM system, cyclists prepared for a potential door opening, whereas without such a system they did not. The results of the statistical analysis of SDLP revealed a significant difference between B and V + AI, which we interpreted as a higher increase of LP during V + AI than for B. However, this finding alone is no adequate basis for proving that this concept is more effective than the others. Further insight is required for a profound statement about the more suitable concept, such as the users’ opinions and experiences with the system. Still, we can assume that AMs systems can assist cyclists in preventing dooring accidents as they show a positive impact on LP.
The cycling speed remained significantly constant during potential dangerous situations while using AMs, except for V + AI where only after did the speed remain at the same level.
5.2. Perceived Safety and Workload
As we did not find any big differences between the conditions supporting the assumption that perceived safety will be increased with AMs, and further found no differences in workload, we reject hypothesis H3 for the time being. We assume that this effect is due to most participants never having used a bike simulator and a C-HMD before. Further, there was the limitation that no additional traffic was present in the simulation, making the situations less risky. Participants were also aware that vehicle doors would open on their way. Nonetheless, our participants were positive that AMs could support them while cycling and could positively impact their perceived safety.
5.3. Usability of AM Notifications
We hypothesized that the V + AI concept would be the preferred AM representation mode over the V and V + VM concepts. Our results showed that participants preferred visual messages with auditory cues when using AMs that informed them in advance of a possible door opening in their path (V + VM, V + AI). In terms of usability and effortlessness of use, both concepts received similarly high ratings and were also rated better than concept V. Thus, our assumptions in H4 apply to both concepts with auditory cues, and we can only partly accept H4.
It was mentioned that the AMs were appropriately timed and allowed our participants to prepare for evasion before a potential door opening. Most of our participants (16/22) were interested in using a support system in the form of a C-HMD with AMs and believed it could help prevent accidents. Therefore, we accept hypothesis H2. Future work should expand the range of warnings that could be provided to cyclists with AMs to increase cyclist road safety in the future.
Our work focused on notifying cyclists of a likely hazardous situation ahead and allows for a preparation time as they near the potential hazard. Participants argued that visual messages would be helpful when multiple hazards are supported. The design of hazard notifications for cyclists must take into account which modalities and patterns best convey the transmitted information about specific potential hazards. We expect that a mix of modalities and patterns will be required for hazard notification systems supporting multiple warnings. Until then, further research is needed on how AMs can best be conveyed to cyclists and how a broad range of potential hazards can be covered to maintain the distinctiveness of AMs, as well as comprehensibility (legibility, recognition, and interpretation) [22]. Our visual and auditory notification designs offer only suggestions for the design of AMs and could be modified to better meet the needs of cyclists, i.e., decreasing the car icon size or using more universal icons.
Twenty participants indicated after the study that they would consider using such notification systems if available and would also include notifications about other types of potential hazards in order to cycle more safely. We plan to investigate the safety aspect further in follow-up studies.
This result stands in contrast to the previously mentioned results of Berge et al. [34], discovering that their participants were more hesitant about user interfaces for cyclists conveying information about critical safety situations in a connected traffic context. Participants expected the (automated) vehicles to be responsible for the cyclists’ safety when they are in the vehicles’ vicinity.
5.4. Responsibility
As already mentioned in the introduction—in general, vehicle occupants are the ones that need to carefully consider their surroundings before opening a vehicle door so as to not pose a risk to other vehicles or VRUs. We want to emphasize that by providing AMs to cyclists, we do not intend it in a way to move the responsibility of preventing dooring accidents “to the victim”. We see it more as providing cyclists with additional information that could prevent them from harm in case a vehicle occupant exits without taking notice of the cyclist.
Hazard notification systems should assist cyclists by making them aware of (potential) danger ahead. Nevertheless, such systems should not be used to shift responsibility to VRUs [58], but the knowledge of the potential danger ahead can make a difference and prevent severe accidents.
5.5. Narrow Bike Lanes
In our study, we only considered cycling on the road, not riding on a dedicated bike lane. However, especially older bike lanes in between parked vehicles and a sidewalk are often relatively narrow, e.g., about 0.5 m wide, so that cyclists cannot maintain a safe distance to parked vehicles. We assume that our proposed systems could be helpful even on narrow bike lanes, but we expect that they will affect cyclists’ behavior differently. Instead of maintaining their speed and increasing their lateral distance to parked vehicles, cyclists would have to slow down when alerted of a potential door opening as there is no room to swerve.
Although the AMs will indicate the same type of threat, the cyclists’ actions to prevent a crash would be different. Therefore, when designing and evaluating AM systems in future work, we must take into account that road construction-related restraints may also influence a cyclist’s actions to avoid an accident.
5.6. Effectiveness of Awareness Messages and “False Positives”
We have proposed using AMs to notify cyclists about a potential dooring hazard; therefore, the occurrence of such a hazard is still uncertain. We envision an AM system for cyclists that would indicate potentially dangerous scenarios to give the cyclist a heads-up to assess their surroundings better. The provided information gives them some time to weigh their options, e.g., to take evasive action safely when notified about potential dooring.
When dooring notifications are prompted to the cyclists, this could mean that a door will open after a dooring message. However, they could also be “false alarms (FAs), which occur as a random activation of the system not corresponding to a threat and not interpretable by the driver [cyclist], and unnecessary alarms (UAs), which occur in situations judged hazardous by the algorithm but not by the driver”, as described by [59] in a driving context.
An issue we see with a system such as AMs notifying about potential hazards is that users are likely to receive multiple unnecessary notifications, as many dooring notifications might not be followed by a door opening. Naujoks et al. [60] analyzed the impact of false and unnecessary alarms of an advisory warning system in a driving simulator study (N = 80). They concluded that false alarms reduced compliance and effectiveness, but unnecessary alarms did not.
Receiving many unnecessary alerts over time could lead to a “cry wolf effect” that is normally associated with false negatives and leads to ignoring notifications. Nonetheless, a challenge for every support system is the effect of users relying on the system and no longer actively trying to become aware of their surroundings, as they take it and its predictions for granted; this can lead to an overconfidence in the system’s capabilities, similar to overtrust in (assistance systems of) AVs, e.g., [61]. The performance of a system seems to be an important predictor of trust in a system [62]. In particular, false alarms have a negative effect on trust in a system [63]. However, we anticipate that helping users understand the potential nature of AMs could calibrate the required confidence in the system; however, this needs further investigation.
5.7. Limitations
Our study was conducted with only a small sample size and did not address different age groups. Further, the bicycle simulator was fixed-base and did not allow for tilting. Nonetheless, all participants were able to handle the simulator after familiarizing themselves with it and getting used to controlling the bike in the simulation.
As our CAVE does not have a screen behind the participants and as it was our intention to keep the experience repeatable and comparable over multiple participants, we had to omit moving traffic that could pass by or overtake the cyclists. However, as there was no approaching traffic behind them, participants did not feel the need to observe their surroundings before swerving. Thus, they did not glance over their shoulder to check for approaching vehicles.
From the average LP profile plots we saw that the general LP with about 1.5 m before receiving an AM or noticing a vehicle door opening is quite high. Apasnore et al. [64] reported that for the city of Ottawa, Canada, they observed that the cyclists’ average lateral distance from the curb is 0.57 m in general. They reported even lower distances of only about 0.35 m when cycling next to parked vehicles, a view that one often comes across in cities where cyclists share the roads with motorized vehicles. The cyclists are, thus, moving in the “dooring zone”; the authors further noted that this is the general distance independent of the cyclist’s lane width. We assume that the LP in our study was higher, as we ran the study without any traffic present. Our focus was foremost on how participants understand and feel about the provided messages, without adding further workload by surrounding traffic. However, we could still identify a positive impact due to the AMs, especially as participants passed the parked vehicle with higher LP than in B. Nonetheless, it is important to further evaluate the functionality of AM systems in traffic, which we will address in future work.
As there was no moving traffic in our study, no upcoming vehicles (or even overtaking ones) could affect the cyclist’s lateral distance and speed. However, as participants generally began to increase their distance at about 6 to 4.5 s before passing the vehicle that triggered a warning notification, we assume they would have enough time to consider what is happening around them to still evade a possible opening door safely. The subjective feedback from the interview supports this assumption. More research is needed on this, though.
5.8. Future Work and Outlook
Subsequently, we plan to compare our findings with the results of a VR-headset user study with moving traffic and investigate the changes in cycling behavior due to oncoming traffic. Additionally, we will address people’s opinions on using C-HMDs and how to best present AMs (focusing on the visual-message, visual-message + auditory-icon, and visual + voice-message representations used here, and other types of aids, e.g., vibrotactile), and increasingly incorporate measures of user experience. Concerning the use of auditory signals, future work will have to consider how to optimally design the acoustic signals for AMs, as they may be masked by background noise. For this, different noise levels have to be considered. We already pointed out an important aspect in this discussion: future research needs to address AMs that could be perceived as “false positives” (no threat due to doors staying closed). On the other side, trust in the system also needs to be calibrated to be able to safely navigate through traffic even if system failures could still occur. We see the potential misinterpretation of the probability of an accident as one of the major challenges that need to be overcome to make such support systems usable.
6. Conclusions
In this work, we investigated whether alerting cyclists about a parked but still occupied vehicle immediately ahead of them through AMs (a message that informs of an upcoming high-potential risk requiring a short-term response [21]) can support them in avoiding dooring accidents in a connected traffic context.
We conducted a mixed-reality user study (N = 24) on a stationary bicycle simulator and focused on the impact of AMs on cycling performance, perceived safety, workload, and usability. When approaching a vehicle posing a potential risk for the cyclist, AMs were displayed on a C-HMD at 9, 6, and 3 s before passing the vehicle. After passing the vehicle, a cancellation message informed the cyclist that the danger was over. Our results show that participants maintained their speed, except for V + AI, where we could only confirm this for the speed after . Our participants began to increase their distance to parked vehicles, approximately on average, after receiving (6 s) when using each of the AM concepts, and reached their maximum distance as they passed. After passing, their distance decreased again. Compared to riding without a support system, cyclists intentionally increased their distance from parked vehicles much earlier to reaching the potential hazard, rather than having to swerve at the sight of an opening door. Although there were no significant differences in perceived safety and workload between conditions (likely due to the limitation that no traffic was present), we are optimistic that such support systems can positively influence perceived safety. Our participants indicated that they would be willing to use such a system.
Overall, we conclude that AMs presented on a C-HMD could support cyclists in avoiding possible door openings. Our findings also indicate a high pragmatic and hedonic quality of use. Based on the additional qualitative findings, we can conclude that both concepts combining visual and auditory cues were preferred by our participants when using AMs to notify them about potential door openings. We further anticipate that using connected traffic technology to provide AMs for cyclists on C-HMDs has the potential to assist cyclists in preventing other possible accidents.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/mti6010003/s1.
Author Contributions
Conceptualization, T.v.S., T.G. and A.R.; methodology, T.v.S., T.G. and A.R.; software, T.v.S.; validation, T.v.S.; formal analysis, T.v.S.; investigation, T.v.S.; resources, T.v.S., T.G. and A.R.; data curation, T.v.S.; writing—original draft preparation, T.v.S.; writing—review and editing, T.v.S., T.G. and A.R.; visualization, T.v.S.; supervision, T.G. and A.R.; project administration, T.v.S.; funding acquisition, T.G. and A.R. All authors have read and agreed to the published version of the manuscript. We applied the FLAE approach for the sequence of authors.
Funding
This work is supported under the “Innovative Hochschule” program of the German Federal Ministry of Education and Research (BMBF), Grant No. 03IHS109A (MenschINBewegung).
Institutional Review Board Statement
Participation was in accordance with the ethical guidelines of the Declaration of Helsinki [65]: participation was voluntary, participants were obliged to provide their written informed consent, had the option to withdraw from the study at any time, and to leave comments or feedback.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available in the supplementary materials.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| AM | Awareness Message |
| B | Baseline |
| CAVE | Cave Automatic Virtual Environment |
| C-HMD | Cyclist Head-/Helmet-Mounted Display |
| CTAM | Car Technology Acceptance Model |
| HMI | Human Machine Interface |
| ITS | Intelligent Transport System |
| LP | Lane Position |
| MLP | Mean Lateral Position |
| NASA-TLX | NASA Task Load Index |
| RLB | Right Lane Boundary |
| SDLP | Standard Deviation of Lane Position |
| TOST | Two One-Sided Tests |
| TTC | Time to Collision |
| UEQ | User Experience Questionnaire |
| V | Visual Message |
| V + AI | Visual Message and Auditory Icon |
| VRU | Vulnerable Road User |
| V + VM | Visual and Voice Message |
References
- Koglin, T. City Cycling. Eur. Plan. Stud. 2014, 22, 227–228. [Google Scholar] [CrossRef]
- Pucher, J.; Buehler, R. Cycling towards a more sustainable transport future. Transp. Rev. 2017, 37, 689–694. [Google Scholar] [CrossRef] [Green Version]
- Vissers, L.; van der Kint, S.; van Schagen, I.; Hagenzieker, M.P. Safe Interaction between Cyclists, Pedestrians and Automated Vehicles. What Do We Know and What Do We Need to Know? SWOV Institute for Road Safety Research: The Hague, The Netherlands, 2017. [Google Scholar] [CrossRef]
- European Transport Safety Council. How Safe is Walking and Cycling in Europe? PIN Flash Report 38; European Transport Safety Council: Etterbeek, Belgium, 2020. [Google Scholar]
- Lawrence, B.M.; Oxley, J.A.; Logan, D.B.; Stevenson, M.R. Cyclist exposure to the risk of car door collisions in mixed function activity centers: A study in Melbourne, Australia. Traffic Inj. Prev. 2018, 19, 164–168. [Google Scholar] [CrossRef] [PubMed]
- Scholliers, J.; Bell, D.; Morris, A.; Garcia-Melendez, A.B. Potential of ITS to Improve Safety and Mobility of VRUs. In Proceedings of the 10th ITS European Congress, Helsinki, Finland, 16–19 June 2014. [Google Scholar]
- Matviienko, A.; Ananthanarayan, S.; Borojeni, S.S.; Feld, Y.; Heuten, W.; Boll, S. Augmenting Bicycles and Helmets with Multimodal Warnings for Children. In Proceedings of the 20th International Conference on Human-Computer Interaction with Mobile Devices and Services Adjunct, MobileHCI 2018, Barcelona, Spain, 3–6 September 2018. [Google Scholar] [CrossRef]
- von Sawitzky, T.; Wintersberger, P.; Löcken, A.; Frison, A.K.; Riener, A. Augmentation Concepts with HUDs for Cyclists to Improve Road Safety in Shared Spaces. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar] [CrossRef]
- Kaß, C.; Schoch, S.; Naujoks, F.; Hergeth, S.; Keinath, A.; Neukum, A. A Methodological Approach to Determine the Benefits of External HMI During Interactions Between Cyclists and Automated Vehicles: A Bicycle Simulator Study. In Proceedings of the 2nd International Conference on HCI in Mobility, Transport and Automotive Systems, MobiTAS 2020, Copenhagen, Denmark, 19–24 July 2020. [Google Scholar] [CrossRef]
- Deutscher Verkehrsssicherheitsrat. Dooring-Kampagne Geht in die Zweite Runde. Available online: https://www.dvr.de/presse/pressemitteilungen/behalte-beim-aussteigen-deine-tuer-im-griff (accessed on 2 May 2021).
- Jänsch, M.; Johannsen, H.; Otte, D. Investigation of Bicycle Accidents Involving Collisions with the Opening Door of Parking Vehicles and Demands for a Suitable Driver Assistance System. In Proceedings of the IRCOBI, Lyon, France, 9–11 September 2015. [Google Scholar]
- Johnson, M.; Newstead, S.; Oxley, J.; Charlton, J. Cyclists and open vehicle doors: Crash characteristics and risk factors. Saf. Sci. 2013, 59, 135–140. [Google Scholar] [CrossRef]
- European Transport Safety Council. Safety of Pedestrians and Cyclists in Urban Areas; European Transport Safety Council: Etterbeek, Belgium, 1999. [Google Scholar]
- United Nations. Vienna Convention on the Law of Treaties; United Nations: New York, NY, USA, 1969. [Google Scholar]
- Office of the Legislative Counsel, Department of Justice, Government of Newfounland and Labrador. Highway Traffic Act. Available online: https://www.assembly.nl.ca/legislation/sr/statutes/h03.htm#169_ (accessed on 7 May 2012).
- State Government of Victoria. Road Safety Road Rules 2017. Available online: https://www.legislation.vic.gov.au/in-force/statutory-rules/road-safety-road-rules-2017/011 (accessed on 20 July 2012).
- Large, D.R.; Choo, M.; Houghton, R. Validating ‘Dutch Reach’: A Preliminary Evaluation of Far-Hand Door Opening and its Impact on Car Drivers’ Head Movements. In Proceedings of the 12th IEEE International Conference on Semantic Computing, ICSC 2018, Barcelona, Spain, 10–11 October 2018. [Google Scholar]
- Scharfenberger, C.; Chakraborty, S.; Färber, G. Robust Image Processing for an Omnidirectional Camera-based Smart Car Door. ACM Trans. Embed. Comput. Syst. 2012, 11, 1–28. [Google Scholar] [CrossRef]
- Zhu, M.; Han, L.; Liang, F.; Xi, C.; Wu, L.; Zhang, Z. A Novel Vehicle Open Door Safety System Based on Cyclist Detection Using Fisheye Camera and Improved Deep Convolutional Generative Adversarial Nets. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019. [Google Scholar] [CrossRef]
- Wegman, F.; Zhang, F.; Dijkstra, A. How to make more cycling good for road safety? Accid. Anal. Prev. 2012, 44, 19–29. [Google Scholar] [CrossRef]
- ISO 18682; Intelligent Transport Systems—External Hazard Detection and Notification Systems—Basic Requirements. ISO: Geneva, Switzerland, 2016.
- ISO 12204; Road vehicles—Ergonomic aspects of transport information and control systems—Introduction to integrating safety critical and time critical warning signals. ISO: Geneva, Switzerland, 2012.
- Garmin Ltd. Varia™ RTL516. Available online: https://buy.garmin.com/de-DE/DE/p/698001#overview (accessed on 31 March 2021).
- Everysight LTD. Raptor AR Smartglasses. Available online: https://everysight.com/de/produkt/raptor-eu/ (accessed on 31 March 2021).
- Engo. Engo Eyewear. Available online: https://engoeyewear.com/ (accessed on 31 July 2021).
- Lujic, I.; de Maio, V.; Pollhammer, K.; Bodrozic, I.; Lasic, J.; Brandic, I. Increasing Traffic Safety with Real-Time Edge Analytics and 5G. In Proceedings of the 4th International Workshop on Edge Systems, Analytics and Networking, EdgeSys 2021, Edinburgh, UK, 26 April 2021. [Google Scholar] [CrossRef]
- Currano, R.; Park, S.Y.; Moore, D.J.; Lyons, K.; Sirkin, D. Little Road Driving HUD: Heads-Up Display Complexity Influences Drivers’ Perceptions of Automated Vehicles. In Proceedings of the ACM Conference on Human Factors in Computing Systems, CHI 2021, Yokohama, Japan, 8–13 May 2021. [Google Scholar] [CrossRef]
- Wintersberger, P.; von Sawitzky, T.; Frison, A.K.; Riener, A. Traffic Augmentation as a Means to Increase Trust in Automated Driving Systems. In Proceedings of the 12th Biannual Conference on Italian SIGCHI Chapter, CHItaly 2017, Cagliari, Italy, 18–20 September 2017. [Google Scholar] [CrossRef]
- Colley, M.; Bräuner, C.; Lanzer, M.; Walch, M.; Baumann, M.; Rukzio, E. Effect of Visualization of Pedestrian Intention Recognition on Trust and Cognitive Load. In Proceedings of the International Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2020, Washington, DC, USA, 21–22 September 2020. [Google Scholar] [CrossRef]
- Schwarz, F.; Fastenmeier, W. Augmented reality warnings in vehicles: Effects of modality and specificity on effectiveness. Accid. Anal. Prev. 2017, 101, 55–66. [Google Scholar] [CrossRef]
- Löcken, A.; Golling, C.; Riener, A. How Should Automated Vehicles Interact with Pedestrians? In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2019, Utrecht, The Netherlands, 21–25 September 2019. [Google Scholar] [CrossRef]
- Ezzati Amini, R.; Katrakazas, C.; Riener, A.; Antoniou, C. Interaction of automated driving systems with pedestrians: Challenges, current solutions, and recommendations for eHMIs. Transp. Rev. 2021, 41, 788–813. [Google Scholar] [CrossRef]
- Moore, D.; Strack, G.E.; Currano, R.; Sirkin, D. Visualizing Implicit eHMI for Autonomous Vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI Adjunct 2019, Utrecht, The Netherlands, 21–25 September 2019. [Google Scholar] [CrossRef]
- Berge, S.H.; Hagenzieker, M.; Farah, H.; de Winter, J. Do cyclists need HMIs in future automated traffic? An interview study. Transp. Res. Part F Traffic Psychol. Behav. 2022, 84, 33–52. [Google Scholar] [CrossRef]
- Bronkhorst, A.W.; Veltman, J.A.; van Breda, L. Application of a three-dimensional auditory display in a flight task. Hum. Factors 1996, 38, 23–33. [Google Scholar] [CrossRef]
- Stevens, C.; Perry, N.; Wiggins, M.; Howell, C. Design and Evaluation of Auditory Icons as Informative Warning Signals; Australian Transportation Safety Bureau: Canberra, Australia, 2006. [Google Scholar]
- Gaspar, J.G.; Brown, T.L.; Marshall, D.C. Examining the interaction between timing and modality in forward collision warnings. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2015, Nottingham, UK, 1–3 September 2015. [Google Scholar] [CrossRef]
- Wickens, C.D. Multiple Resources and Mental Workload. Hum. Factors 2008, 50, 449–455. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Wu, X.; Gabbard, J.L.; Polys, N.F. Exploring Head-up Augmented Reality Interfaces for Crash Warning Systems. In Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2013, Eindhoven, The Netherlands, 28–30 October 2013. [Google Scholar] [CrossRef]
- Blattner, M.; Sumikawa, D.; Greenberg, R. Earcons and Icons: Their Structure and Common Design Principles. Hum.-Comput. Interact. 1989, 4, 11–44. [Google Scholar] [CrossRef]
- Jeon, M. Lyricons (Lyrics + Earcons): Designing a New Auditory Cue Combining Speech and Sounds. In Proceedings of the HCI International 2013—Posters’ Extended Abstracts, Las Vegas, NV, USA, 21–26 July 2013. [Google Scholar] [CrossRef]
- Walker, B.N.; Lindsay, J.; Nance, A.; Nakano, Y.; Palladino, D.K.; Dingler, T.; Jeon, M. Spearcons (speech-based earcons) improve navigation performance in advanced auditory menus. Hum. Factors 2013, 55, 157–182. [Google Scholar] [CrossRef] [Green Version]
- Šabić, E.; Chen, J.; MacDonald, J.A. Toward a Better Understanding of In-Vehicle Auditory Warnings and Background Noise. Hum. Factors 2021, 63, 312–335. [Google Scholar] [CrossRef] [PubMed]
- Freeman, E.; Wilson, G.; Vo, D.B.; Ng, A.; Politis, I.; Brewster, S. Multimodal feedback in HCI: Haptics, non-speech audio, and their applications. In The Handbook of Multimodal-Multisensor Interfaces: Foundations, User Modeling, and Common Modality Combinations; Oviatt, S., Schuller, B., Cohen, P.R., Sonntag, D., Potamianos, G., Krüger, A., Eds.; ACM: New York, NY, USA, 2017; Volume 1, pp. 277–317. [Google Scholar] [CrossRef]
- de Waard, D.; Edlinger, K.; Brookhuis, K. Effects of listening to music, and of using a handheld and handsfree telephone on cycling behaviour. Transp. Res. Part F Traffic Psychol. Behav. 2011, 14, 626–637. [Google Scholar] [CrossRef] [Green Version]
- The Linux Foundation. gRPC: A High Performance, Open Source Universal RPC Framework. Available online: https://www.grpc.io (accessed on 31 March 2021).
- Franke, T.; Attig, C.; Wessel, D. A Personal Resource for Technology Interaction: Development and Validation of the Affinity for Technology Interaction (ATI) Scale. Int. J. Hum.-Comput. Interact. 2019, 35, 456–467. [Google Scholar] [CrossRef]
- Osswald, S.; Wurhofer, D.; Trösterer, S.; Beck, E.; Tscheligi, M. Predicting information technology usage in the car: Towards a car technology acceptance model. In Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2012, Portsmouth, NH, USA, 17–19 October 2012. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.G.; Davis, F.D. User Acceptance of Information Technology: Toward a Unified View. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef] [Green Version]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar] [CrossRef]
- Knappe, G.; Keinath, A.; Bengler, K.; Meinecke, C. Driving Simulator as an Evaluation Tool—Assessment of the Influence of Field of View andSecondary Tasks on Lane Keeping and Steering Performance. In Proceedings of the the 20th International Technical Conference on the Enhanced Safety of Vehicles (ESV 2007), Lyon, France, 18–21 June 2007. [Google Scholar]
- IBM Corp. IBM SPSS Statistics for Windows. Version 26.0, Released 2019. Available online: https://www.ibm.com/support/pages/downloading-ibm-spss-statistics-26 (accessed on 19 December 2021).
- R Core Team. R: A Language and Environment for Statistical Computing. 2021. Available online: https://www.R-project.org/ (accessed on 19 December 2021).
- Schafer, R. What Is a Savitzky-Golay Filter? [Lecture Notes]. IEEE Signal Process. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]
- Lakens, D. Equivalence Tests: A Practical Primer for t Tests, Correlations, and Meta-Analyses. Soc. Psychol. Personal. Sci. 2017, 8, 355–362. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, R.S.; Lane, N.E.; Berbaum, K.S.; Lilienthal, M.G. Simulator Sickness Questionnaire: An Enhanced Method for Quantifying Simulator Sickness. Int. J. Aviat. Psychol. 1993, 3, 203–220. [Google Scholar] [CrossRef]
- Golding, J.F. Predicting individual differences in motion sickness susceptibility by questionnaire. Personal. Individ. Differ. 2006, 41, 237–248. [Google Scholar] [CrossRef]
- Hagenzieker, M.P.; van der Kint, S.; Vissers, L.; van Schagen, I.N.L.G.; de Bruin, J.; van Gent, P.; Commandeur, J.J.F. Interactions between cyclists and automated vehicles: Results of a photo experiment*. J. Transp. Saf. Secur. 2020, 12, 94–115. [Google Scholar] [CrossRef] [Green Version]
- Lees, M.N.; Lee, J.D. The influence of distraction and driving context on driver response to imperfect collision warning systems. Ergonomics 2007, 50, 1264–1286. [Google Scholar] [CrossRef] [PubMed]
- Naujoks, F.; Kiesel, A.; Neukum, A. Cooperative warning systems: The impact of false and unnecessary alarms on drivers’ compliance. Accid. Anal. Prev. 2016, 97, 162–175. [Google Scholar] [CrossRef] [PubMed]
- Wintersberger, P.; Frison, A.K.; Riener, A.; von Sawitzky, T. Fostering User Acceptance and Trust in Fully Automated Vehicles: Evaluating the Potential of Augmented Reality. Presence 2019, 27, 46–62. [Google Scholar] [CrossRef]
- Hancock, P.A.; Billings, D.R.; Schaefer, K.E.; Chen, J.Y.C.; de Visser, E.J.; Parasuraman, R. A meta-analysis of factors affecting trust in human-robot interaction. Hum. Factors 2011, 53, 517–527. [Google Scholar] [CrossRef] [PubMed]
- Geels-Blair, K.; Rice, S.; Schwark, J. Using System-Wide Trust Theory to Reveal the Contagion Effects of Automation False Alarms and Misses on Compliance and Reliance in a Simulated Aviation Task. Int. J. Aviat. Psychol. 2013, 23, 245–266. [Google Scholar] [CrossRef]
- Apasnore, P.; Ismail, K.; Kassim, A. Bicycle-vehicle interactions at mid-sections of mixed traffic streets: Examining passing distance and bicycle comfort perception. Accid. Anal. Prev. 2017, 106, 141–148. [Google Scholar] [CrossRef]
- World Medical Association. World Medical Association Declaration of Helsinki: Ethical principles for medical research involving human subjects. JAMA 2013, 310, 2191–2194. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
The incoming message states “Attention! A door could open!” and a transparent, green icon of a vehicle with an opened door is displayed (), then changing to an orange icon with text indicating the distance (). In the next message (), the icon changes to red and, at last, a cancellation message () notifies the cyclist that the “Danger is over!”. The notifications were displayed in a screen-fixed position.
Figure 1.
The incoming message states “Attention! A door could open!” and a transparent, green icon of a vehicle with an opened door is displayed (), then changing to an orange icon with text indicating the distance (). In the next message (), the icon changes to red and, at last, a cancellation message () notifies the cyclist that the “Danger is over!”. The notifications were displayed in a screen-fixed position.

Figure 2.
A visualization of the used auditory icons from to showing their corresponding waveform (a) and spectrogram (b).
Figure 2.
A visualization of the used auditory icons from to showing their corresponding waveform (a) and spectrogram (b).
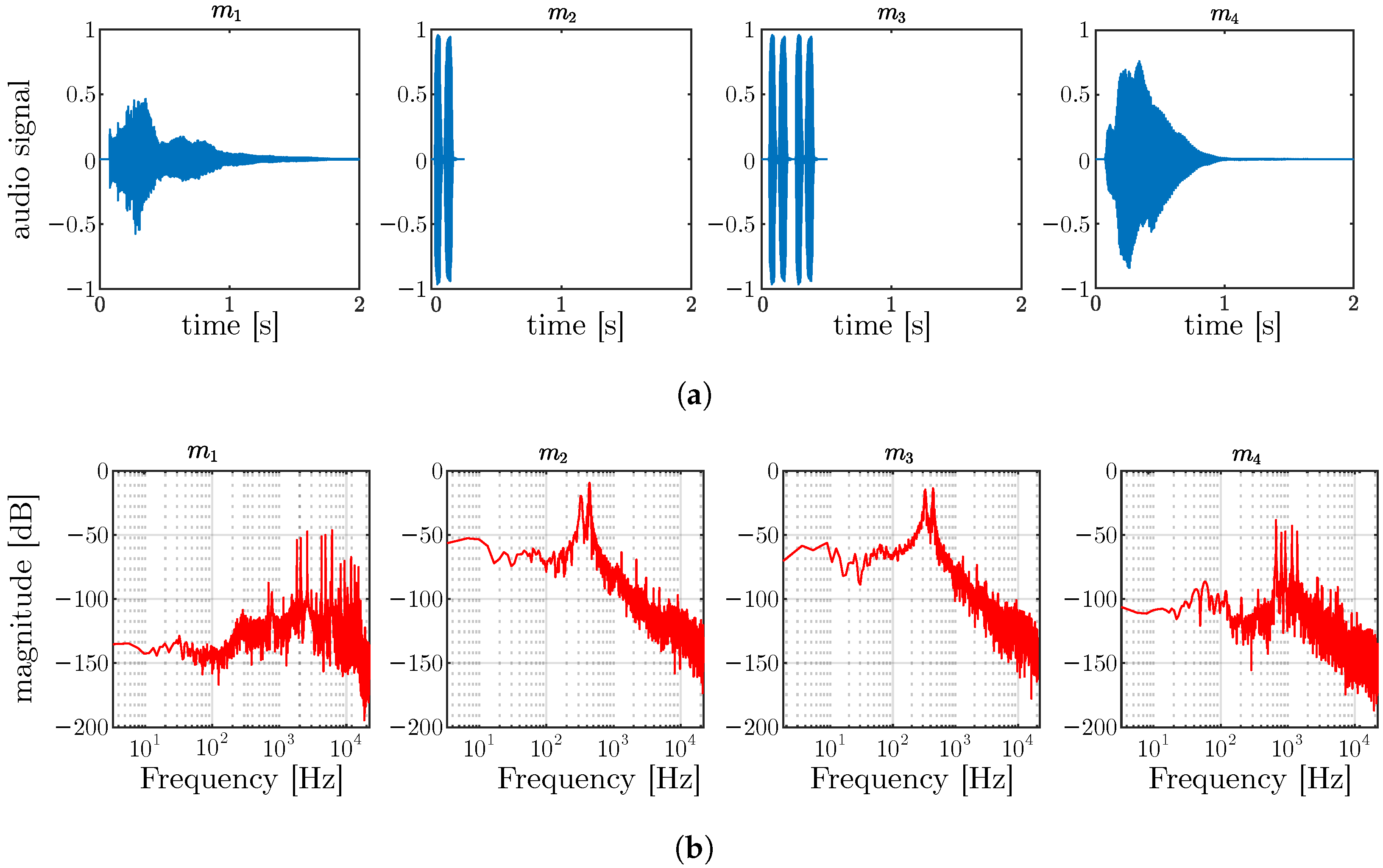
Figure 3.
A picture of the bicycle simulator setup in the CAVE.
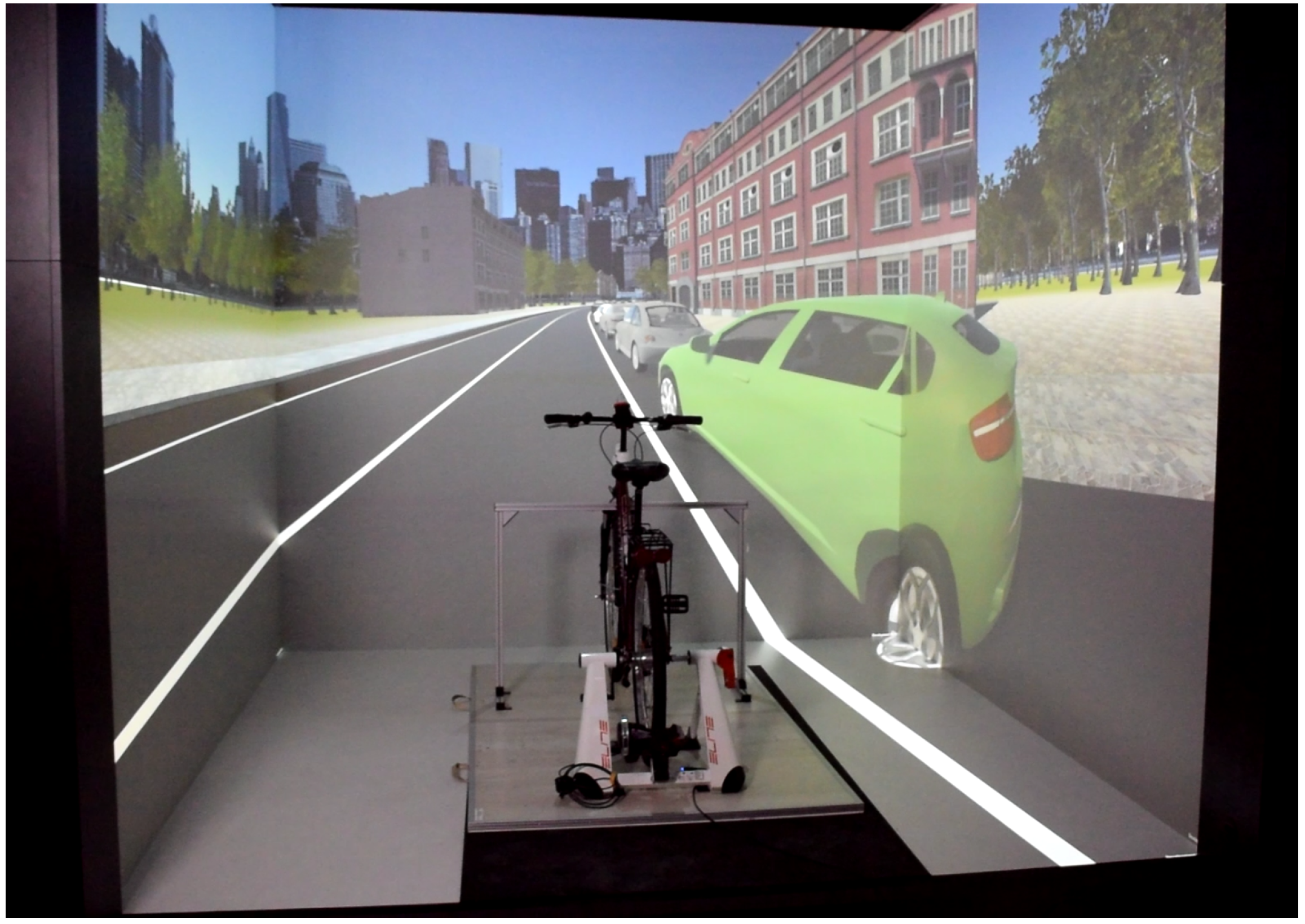
Figure 4.
An overview of the study procedure (a) and a schematic representation of the rides (b). The car symbols represent parked vehicles, and the darker cars represent occupied vehicles. The gray areas illustrate an exemplary (not accurate) time period during which the AMs are presented. In each three subsequent occupied vehicles, each door opening type occurred once. Further, we highlighted that the first third of the baseline ride was reserved for familiarizing with the simulator. The first three notifications for occupied vehicles were intended for familiarization with the notification system.
Figure 4.
An overview of the study procedure (a) and a schematic representation of the rides (b). The car symbols represent parked vehicles, and the darker cars represent occupied vehicles. The gray areas illustrate an exemplary (not accurate) time period during which the AMs are presented. In each three subsequent occupied vehicles, each door opening type occurred once. Further, we highlighted that the first third of the baseline ride was reserved for familiarizing with the simulator. The first three notifications for occupied vehicles were intended for familiarization with the notification system.
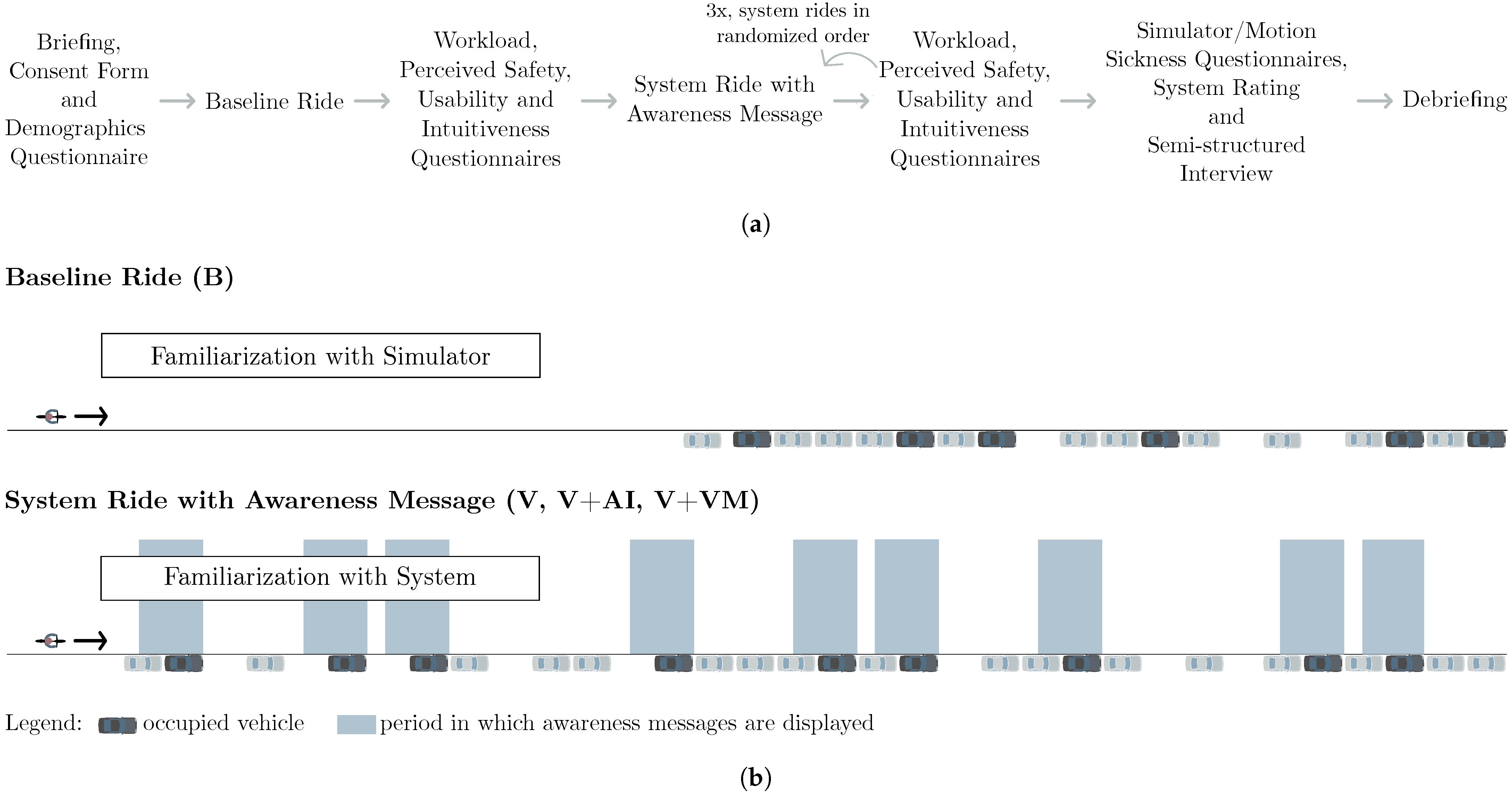
Figure 5.
Lateral distance profiles: in (a), per condition with one plot per door opening type, and in (b), per door opening type with one plot per condition. Further, the time points when AMs show up are highlighted at 9, 6, 3, and 0 s by a notification icon. Whether a door opens is indicated by a small warning sign (light pink for non-critical situations (at 6 s), and dark pink for critical situations (at 2 s)). The time interval of passing the vehicle is indicated with a car icon at i7.
Figure 5.
Lateral distance profiles: in (a), per condition with one plot per door opening type, and in (b), per door opening type with one plot per condition. Further, the time points when AMs show up are highlighted at 9, 6, 3, and 0 s by a notification icon. Whether a door opens is indicated by a small warning sign (light pink for non-critical situations (at 6 s), and dark pink for critical situations (at 2 s)). The time interval of passing the vehicle is indicated with a car icon at i7.
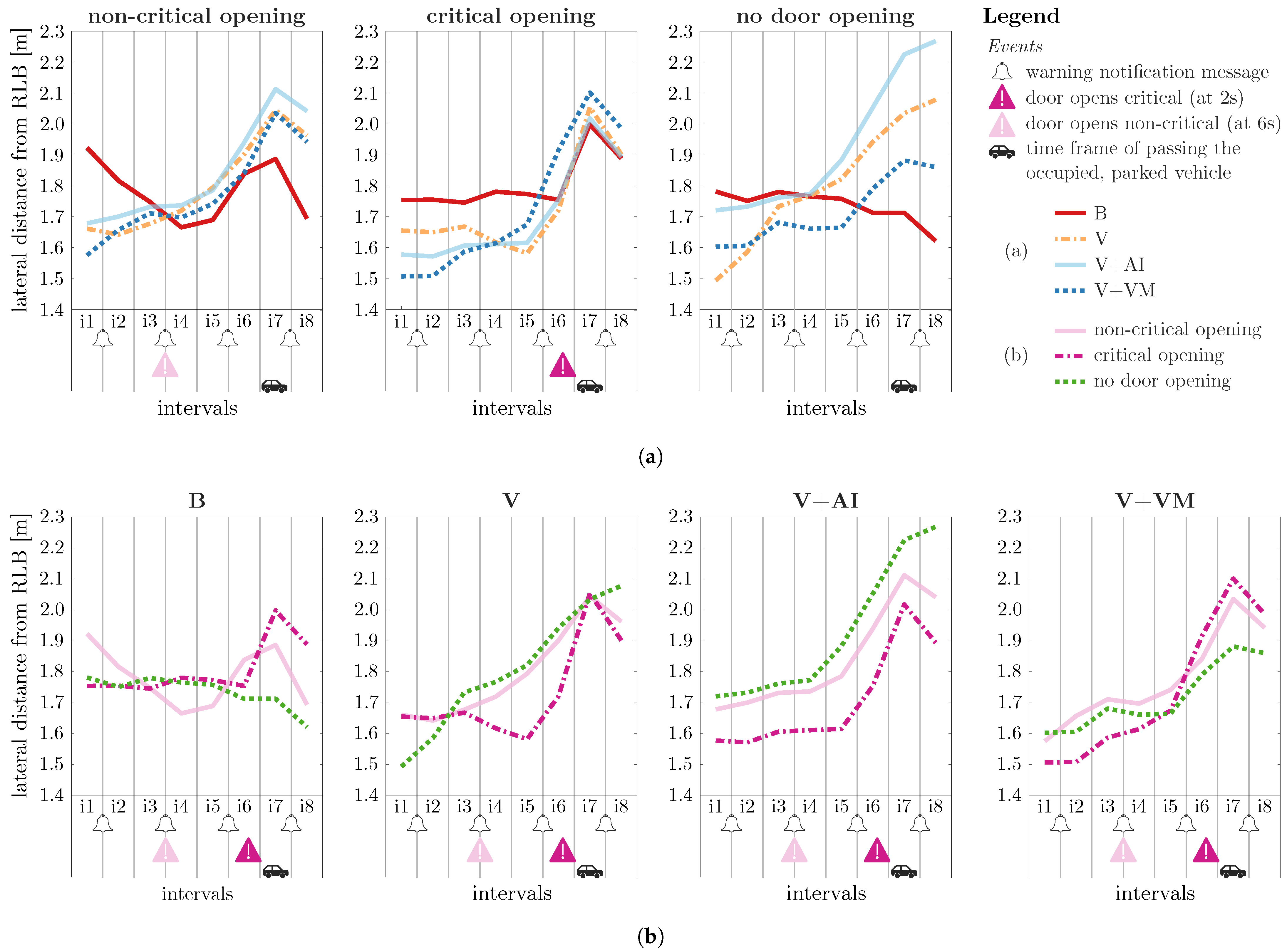
Figure 6.
Speed data smoothed with the Savitzky–Golay FIR filter compared to the recorded speed.

Figure 7.
Percentage speed deviation from the mean during active AMs, sorted by condition.


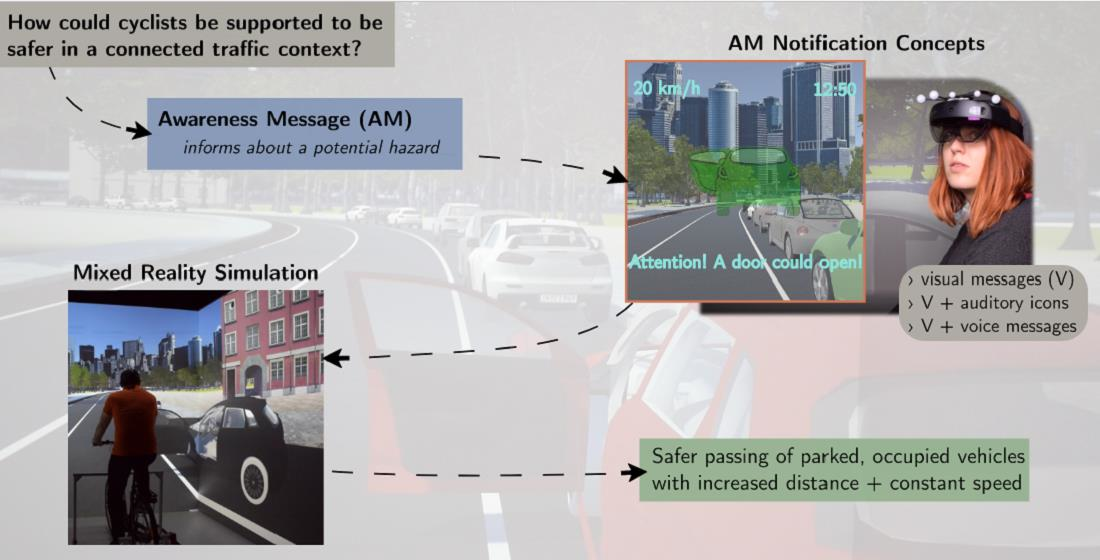{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Responses to the general questions (7-point Likert scales, 1—not familiar/low, 7—familiar/high).
Table 1.
Responses to the general questions (7-point Likert scales, 1—not familiar/low, 7—familiar/high).
| Item | Md | IQR | Notes |
|---|---|---|---|
| Familiarity with VR applications | 2 | 4 | |
| Familiarity with computer games | 5 | 3 | |
| Affinity for Technology Interaction | 5 | 1 | Cronbach’s 0.883 |
| Perceived Risk of encountering a door opening | 5.5 | 2 | yes (9) |
| (by previously experienced encounters) | 5 | 1 | no (13) |
Table 2.
Descriptions of the SDLP measurements during active AMs. For B, we considered the time frames where a warning would be triggered when an AM system would have been used. Unit: [m].
Table 2.
Descriptions of the SDLP measurements during active AMs. For B, we considered the time frames where a warning would be triggered when an AM system would have been used. Unit: [m].
| Door Opening Type | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Non-Critical | Critical | None | Total | ||||||
| Mdn | IRQ | Mdn | IRQ | Mdn | IRQ | Mdn | IRQ | ||
| Condition | B | 0.25 | 0.29 | 0.17 | 0.19 | 0.18 | 0.24 | 0.19 | 0.32 |
| V | 0.20 | 0.57 | 0.24 | 0.50 | 0.18 | 0.69 | 0.22 | 0.69 | |
| V + AI | 0.22 | 0.42 | 0.30 | 0.65 | 0.23 | 0.47 | 0.23 | 0.69 | |
| V + VM | 0.22 | 0.39 | 0.22 | 0.48 | 0.16 | 0.38 | 0.20 | 0.58 | |
| total | 0.23 | 0.62 | 0.22 | 0.66 | 0.18 | 0.70 | 0.20 | 0.70 | |
Table 3.
Test statistics for the paired TOST equivalence test on cycling speed. NHST: Null hypothesis testing; TOST: two one-sided tests.
Table 3.
Test statistics for the paired TOST equivalence test on cycling speed. NHST: Null hypothesis testing; TOST: two one-sided tests.
| Compared Intervals | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m(2,3)−m(1,2) | m(3,4)−m(2,3) | ||||||||||||
| NHST | TOST | NHST | TOST | ||||||||||
| Lower | Upper | Lower | Upper | ||||||||||
| condition | t (16) | p | t (16) | p | t (16) | p | t (16) | p | t (16) | p | t (16) | p | |
| B | 0.226 | 1.000 | 8.68 | <0.001 | −8.22 | <0.001 | −8.829 | <0.001 | 40.38 | <0.001 | −58.04 | <0.001 | |
| V | −1.391 | 0.549 | 8.58 | <0.001 | −11.36 | <0.001 | −0.622 | 1.000 | 4.04 | <0.001 | −5.29 | <0.001 | |
| V + AI | −0.943 | 1.000 | 1.24 | 0.351 | −3.12 | 0.009 | 0.301 | 1.000 | 6.33 | <0.001 | −5.73 | <0.001 | |
| V + VM | −0.844 | 1.000 | 5.33 | <0.001 | −7.02 | <0.001 | 0.016 | 1.000 | 4.79 | <0.001 | −4.76 | <0.001 | |
Table 4.
Median and Interquartile Range for UEQ and INTUI items and/or subscales. We further added the relations of the conditions where the items/subscales were rated significantly different.
Table 4.
Median and Interquartile Range for UEQ and INTUI items and/or subscales. We further added the relations of the conditions where the items/subscales were rated significantly different.
| V | V + AI | V + VM | ||||||
|---|---|---|---|---|---|---|---|---|
| Item/Subscale | Sig. Differences | Mdn | IQR | Mdn | IQR | Mdn | IQR | |
| UEQ | Pragmatic Quality | V + AI > V, V + AI > V + VM | 2.5 | 1.5 | 2.5 | 2.5 | 2.5 | 2 |
| obstructive/supportive | - | 1.5 | 1.5 | 2.5 | 1.5 | 2.5 | 1 | |
| complicated/easy | - | 2.5 | 2.5 | 2.5 | 1.5 | 2.5 | 1 | |
| inefficient/efficient | - | 1.5 | 1.5 | 2.5 | 2.5 | 2.5 | 2 | |
| confusing/clear | - | 2.5 | 0.5 | 2.5 | 2.5 | 2.5 | 2 | |
| Hedonic Quality | V + AI > V, V + VM > V | 1.5 | 2.5 | 2.5 | 2.5 | 2.5 | 2 | |
| boring/exiting | V + AI > V | 0.5 | 2.5 | 1.5 | 2.5 | 1.5 | 2 | |
| not interesting/interesting | V + AI > V, V + VM > V | 1.5 | 2.5 | 2.5 | 2.5 | 2.5 | 2 | |
| conventional/inventive | V + AI > V | 2.5 | 3.5 | 2.5 | 3.5 | 2.5 | 2 | |
| usual/leading edge | - | 2.5 | 2.5 | 2.5 | 1.5 | 2.5 | 2 | |
| Overall Quality | V + AI > V, V + VM > V | 2.5 | 2.5 | 2.5 | 2.5 | 2.5 | 2 | |
| INTUI | Effortlessness | V + AI > V, V + VM > V | 6.5 | 2.5 | 6.5 | 2.5 | 6.5 | 2 |
| Gut Feeling | - | 3.5 | 3.5 | 3.5 | 3.5 | 3.5 | 4 | |
| Intuitiveness | - | 6.5 | 2.5 | 6.5 | 2.5 | 6.5 | 2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
von Sawitzky, T.; Grauschopf, T.; Riener, A. “Attention! A Door Could Open.”—Introducing Awareness Messages for Cyclists to Safely Evade Potential Hazards. Multimodal Technol. Interact. 2022, 6, 3. https://doi.org/10.3390/mti6010003
AMA Style
von Sawitzky T, Grauschopf T, Riener A. “Attention! A Door Could Open.”—Introducing Awareness Messages for Cyclists to Safely Evade Potential Hazards. Multimodal Technologies and Interaction. 2022; 6(1):3. https://doi.org/10.3390/mti6010003
Chicago/Turabian Stylevon Sawitzky, Tamara, Thomas Grauschopf, and Andreas Riener. 2022. "“Attention! A Door Could Open.”—Introducing Awareness Messages for Cyclists to Safely Evade Potential Hazards" Multimodal Technologies and Interaction 6, no. 1: 3. https://doi.org/10.3390/mti6010003