
The Road Network Design Problem for the Deployment of Automated Vehicles (RNDP-AVs): A Nonlinear Programming Mathematical Model

 , ,
, ,
Abstract
:1. Introduction
2. Background
3. The Road Network Design Problem for AVs Deployment (RNDP-AVs)
3.1. Formulation of the RNDP-AVs Model
- AVs are assumed to be level 4 [6], meaning they can be driven manually outside dedicated roads but will assume autopilot mode inside AV subnetworks;
- AVs circulate everywhere, whereas CVs’ circulation is prohibited on AV subnetworks;
- Constant travel demand, i.e., an O-D matrix for AV drivers and another one for CV drivers;
- Each trip is assigned to an AV or a CV;
- Public authorities invest in each dedicated road to make it fit for AVs;
- A dedicated road comprises both directions dedicated to automated traffic.
| : | set of nodes in the network, where is the number of nodes. |
| : | set of links of the road network where vehicles move. |
| : | set of O-D pairs that represent the trips demand in the network. |
| : | set of type of vehicles (mode) in the network: AV and CV |
| : | set of hours of the day |
| : | penetration rate of AVs in the vehicle fleet, between 0 and 1. |
| : | coefficient that reflects the efficiency of automated traffic on the road capacity in mixed traffic (MT) conditions, i.e., in regular roads. This coefficient can be compared to a passenger car unit, as it reflects the number of CVs to which an AV corresponds. Defined between 0 (an AV has no effect on traffic) and 1 (an AV is as efficient as a CV). |
| : | coefficient that reflects the maximum efficiency of automated traffic (AT), i.e., in dedicated roads, also between 0 and 1. |
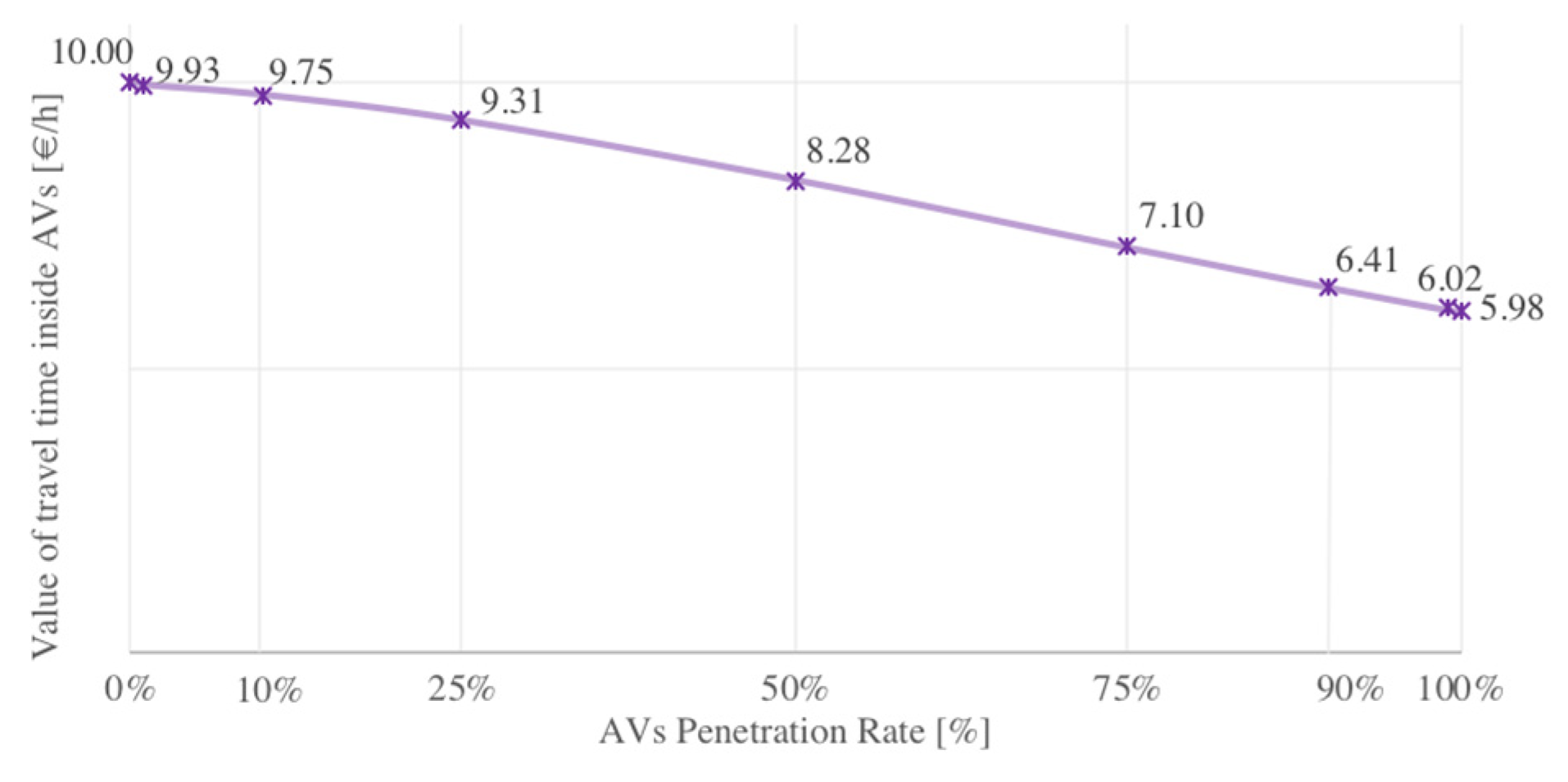
| : | value of travel time inside cars, in monetary units per hour. |
| : | travel demand of mode from an origin, node , towards a destination, node , from period to period , . |
| : | minimum driving travel time in free-flow speed at each link , expressed in hours. |
| : | length of each link , expressed in kilometres. |
| : | capacity of each link , in vehicles for the period of analysis. |
| : | big number. |
| : | binary variable equal to 1 if link is assigned for AV-only driving. |
| : | continuous variable that corresponds to the flow of vehicles in each link and each pair , from period to period , . |
| : | continuous variable that acts as penalty factor to avoid CV flow in dedicated roads, defined per link and pair , from period to period , . |
| : | continuous variable that represents the flow of AVs when a link is dedicated for AVs only (), regarding each O-D pair , from period to period , . This variable distinguishes AV benefits in mixed or automated traffic. |
3.2. Progressive RNDP-AVs Model: AV Subnetworks Design throughout the Transition Process
- Incremental planning, i.e., dedicated roads are added incrementally as the penetration rate evolves. It starts with the computation of the first design stage, and henceforth, the solution from the precedent stage is maintained with new constraints;
- Long-term planning, i.e., the optimal solution at a long-term horizon. It starts by solving the RNDP-AVs for the last design stage (maximum penetration rate) and reversely reduces that subnetwork by limiting the creation of the decision variables at each stage;
- Hybrid planning, i.e., a mixed planning strategy combining both the incremental and long-term planning strategies. The model first computes the optimal long-term solution, e.g., 90% AVs. Henceforth, AV subnetworks network evolve incrementally towards the optimal final network design.
| design stages, where is the latest with the maximum AV penetration considered. | |
| AVs penetration rate of stage . Note that . | |
| optimal solution ( vector) of each design stage . |
| Algorithm 1 Incremental planning | |
| 1: 2: while do 3: get 4: create all decision variables 5: if then 6: 7: end-if 8: function Objective Function 9: 10: end-function 11: 12: 13: Clear all decision variables 14: end | Starts calculating from the first design stage with the minimum penetration rate New constraints from prior design stage: dedicated roads from stage remain in stage . Save solution from design stage . |
| Algorithm 2 Long-term planning | |
| 1: 2: while do 3: get 4: if then 5: create all decision variables 6: function Objective Function 7: 8: end-function 9: else 10: create 11: create remaining decision variables, 12: function Objective Function 13: 14: end-function 15: end-if 16: 17: Clear all decision variables 18: 19: end | Starts calculating the last design stage starts with the maximum penetration rate (e.g., 90% of AVs). Calculation of the solutions in reverse Limits the solution space by evaluating only the dedicated roads that belong to the following design stage. |
| Algorithm 3 Hybrid planning | |
| 1: 2: create all decision variables 3: function Objective Function 4: 5: end-function 6: 7: Clear all decision variables 8: 9: while do 10: get 11: create all decision variables 12: if then 13: 14: end-if 15: function Objective Function 16: 17: end-function 18: 19: 20: Clear all decision variables 21: end | Starts calculating the last design stage starts with the maximum penetration rate (e.g., 90% of AVs). Starts calculating from the first design stage with the minimum penetration rate . Limits the solution space by evaluating only the dedicated roads that belong to the last design stage. New constraints from prior design stage: dedicated roads from stage remain in the stage . Save solution from design stage . |
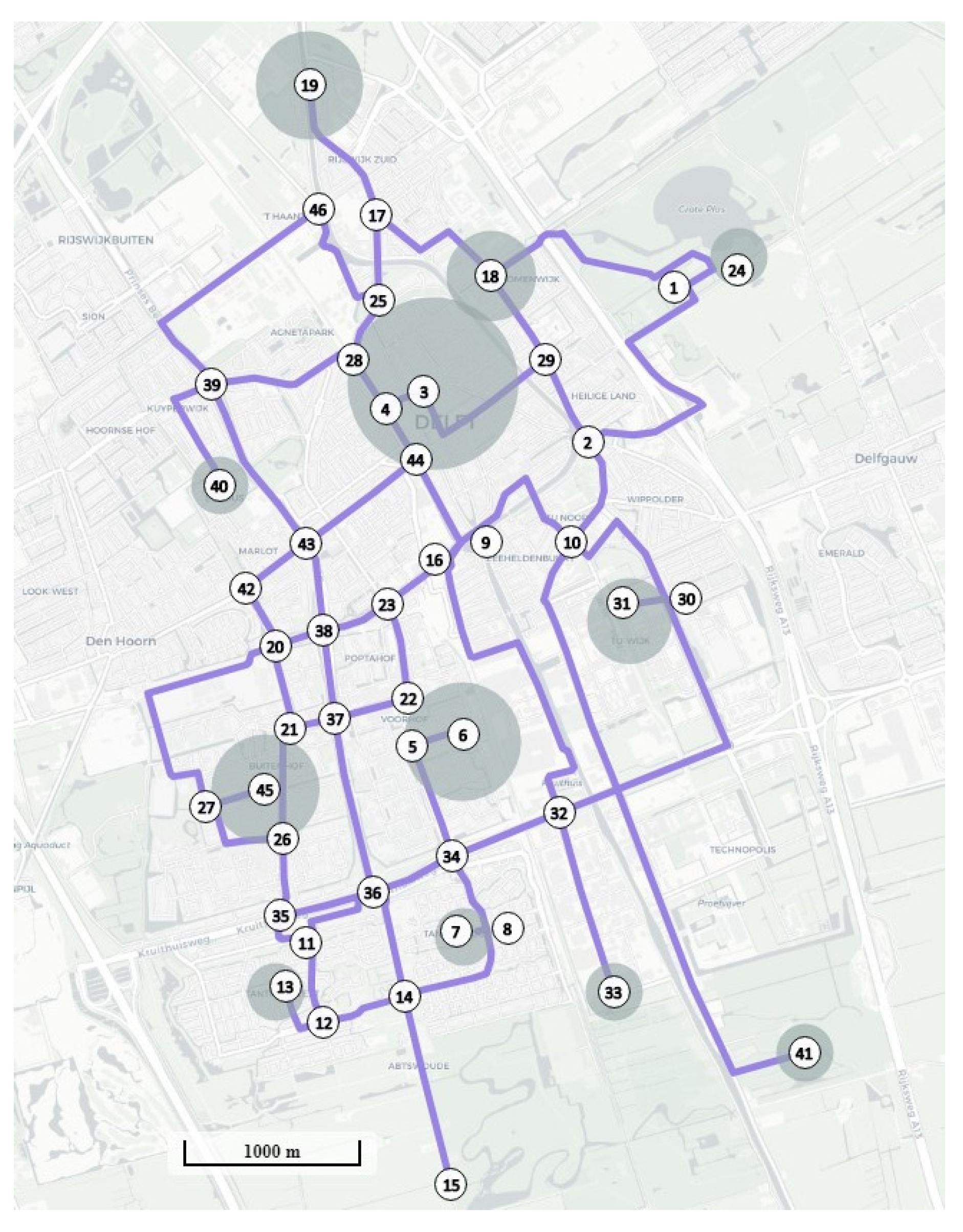
4. Application to a Quasi-Real Case Study: The City of Delft
4.1. Setting up the Case Study
- Base Scenario without AV-dedicated road links, meaning that all vehicles circulate in mixed traffic conditions—see the results in Table 1. The base scenario is created to further compare its results with the Daily Scenario. Vehicles circulate everywhere in mixed traffic conditions, reflecting the impact of AVs’ deployment without any road traffic segregation. Constraints (18) are added to the prior RNDP-AVs formulation to replicate the Base Scenario.
- Peak-Hour Scenario designs AV subnetworks only for the peak-hour demand, that in the Delft case study is between 9 and 10 a.m. (15% of the daily trips)—see the results in Table 2. This scenario is created to further compare and discuss the importance of considering the daily demand in this kind of road network design problem. Therefore, the experiments on this scenario will consider only the optimality analysis that represents the optimal solution and the minimisation of travel costs and network congestion.
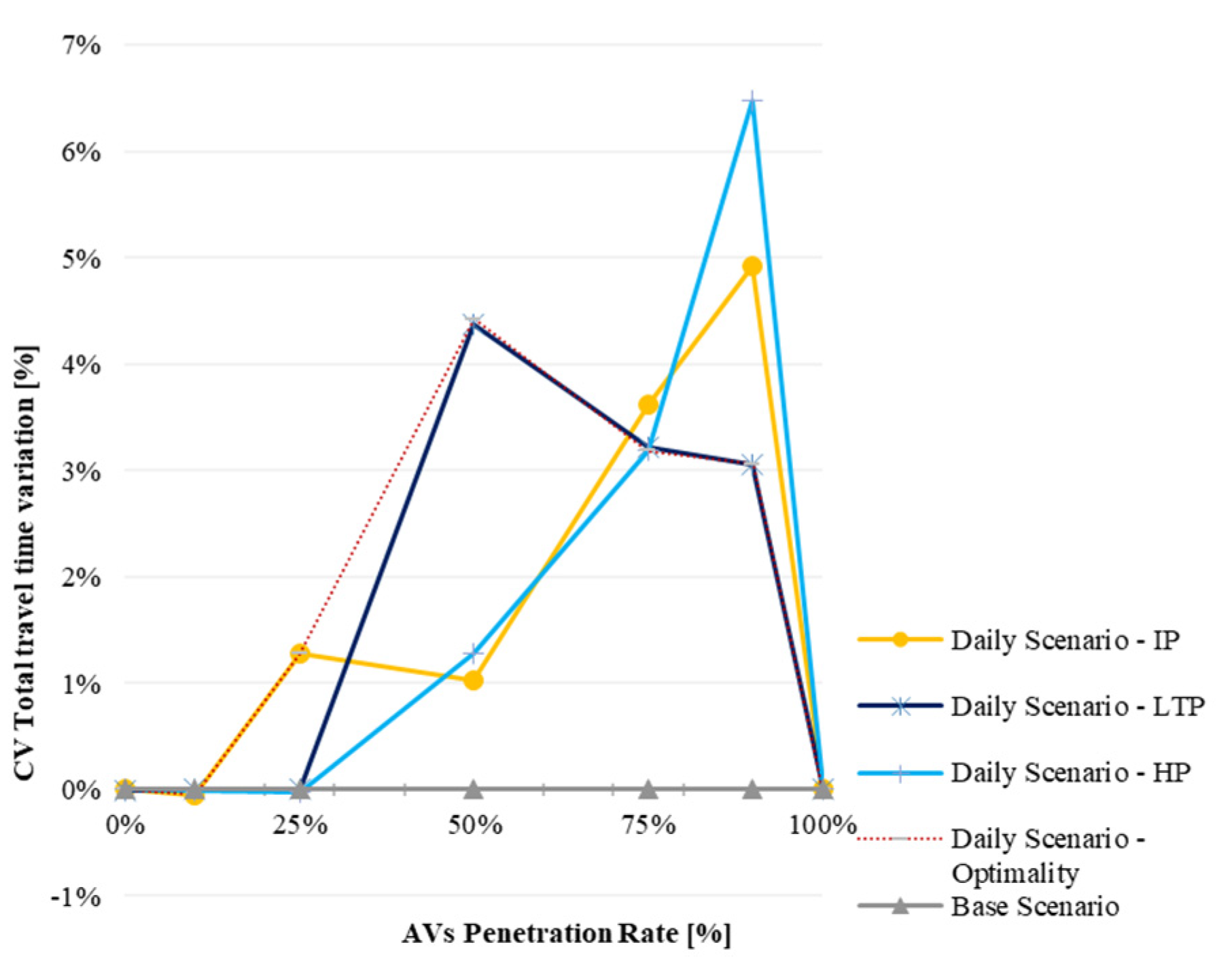
- Daily Scenario designs AV subnetworks for the whole daily demand. It comprises only the travellers’ perspective by minimizing the overall total travel cost, balancing AVs’ travel savings and CVs’ extra travel time costs—see the results in Table 3. The Delft experiments are calculated throughout this transition process of AV deployment in four analyses; the optimality analysis shows the optimal solutions at each design stage (penetration rate), alongside the previously proposed planning strategies: the incremental, the long-term and the hybrid.
4.2. User Equilibrium Validation
4.3. Mixed Traffic Conditions without AV Subnetworks
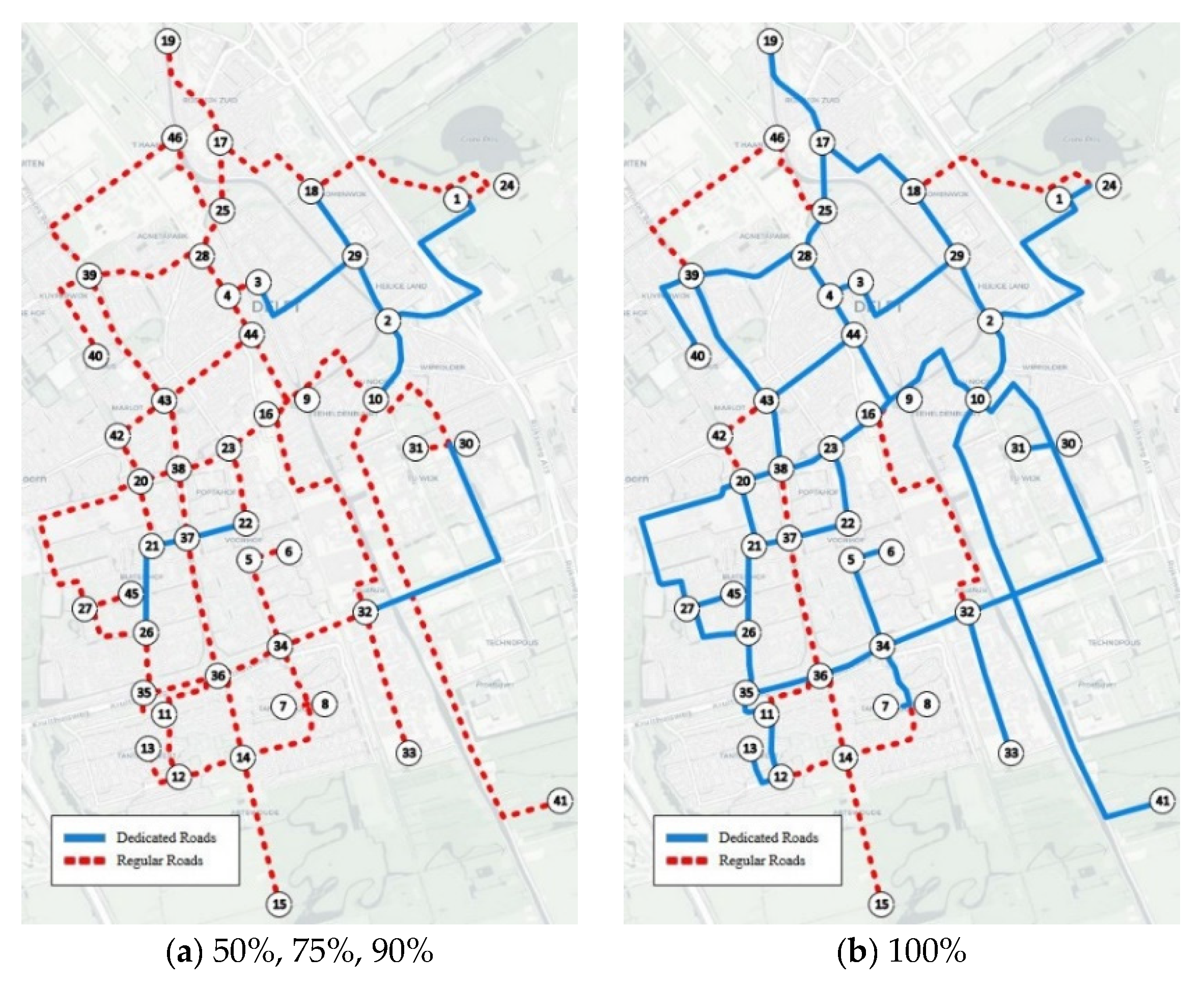
4.4. AV Subnetworks Designed for the Daily Traffic Demand
4.5. Implications of AV Subnetworks
- CVs experience congestion in AV subnetworks’ surroundings that can be depicted by an increase in total CVs’ delay (see Figure 12). This occurs, for instance, at a penetration rate of 90%.
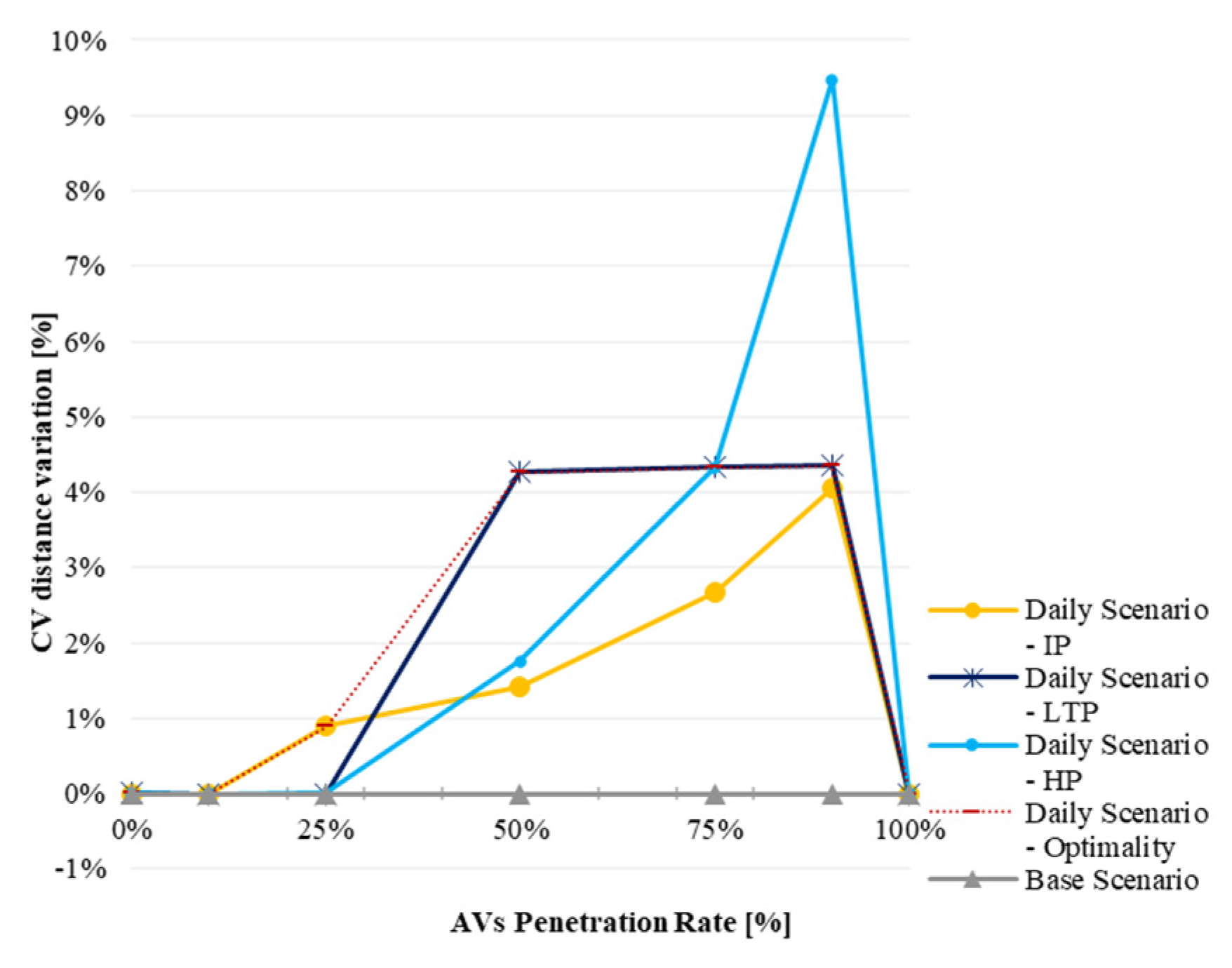
- CVs experience detouring away from AV subnetworks to reach their destination, which is depicted by an increase in CVs’ distance (see Figure 10). This occurs, for instance, at a penetration rate of 75%.
- As AVs’ value of travel time decreases, AV passengers might travel longer, which can be depicted by an increase in AVs’ delay while in congestion (see Figure 13). This occurs, for instance, at a penetration rate of 25%.
- AV trips might occur on shorter routes (lower distances) and experience higher travel times (Figure 11) This happens if AV subnetworks include roads with lower capacity/speed, when both AV delays and distance decrease. For example, this happens at a penetration rate of 10% in the IP and HP and of 50% in the LTP.
4.6. Daily and Peak-Hour Design Comparison
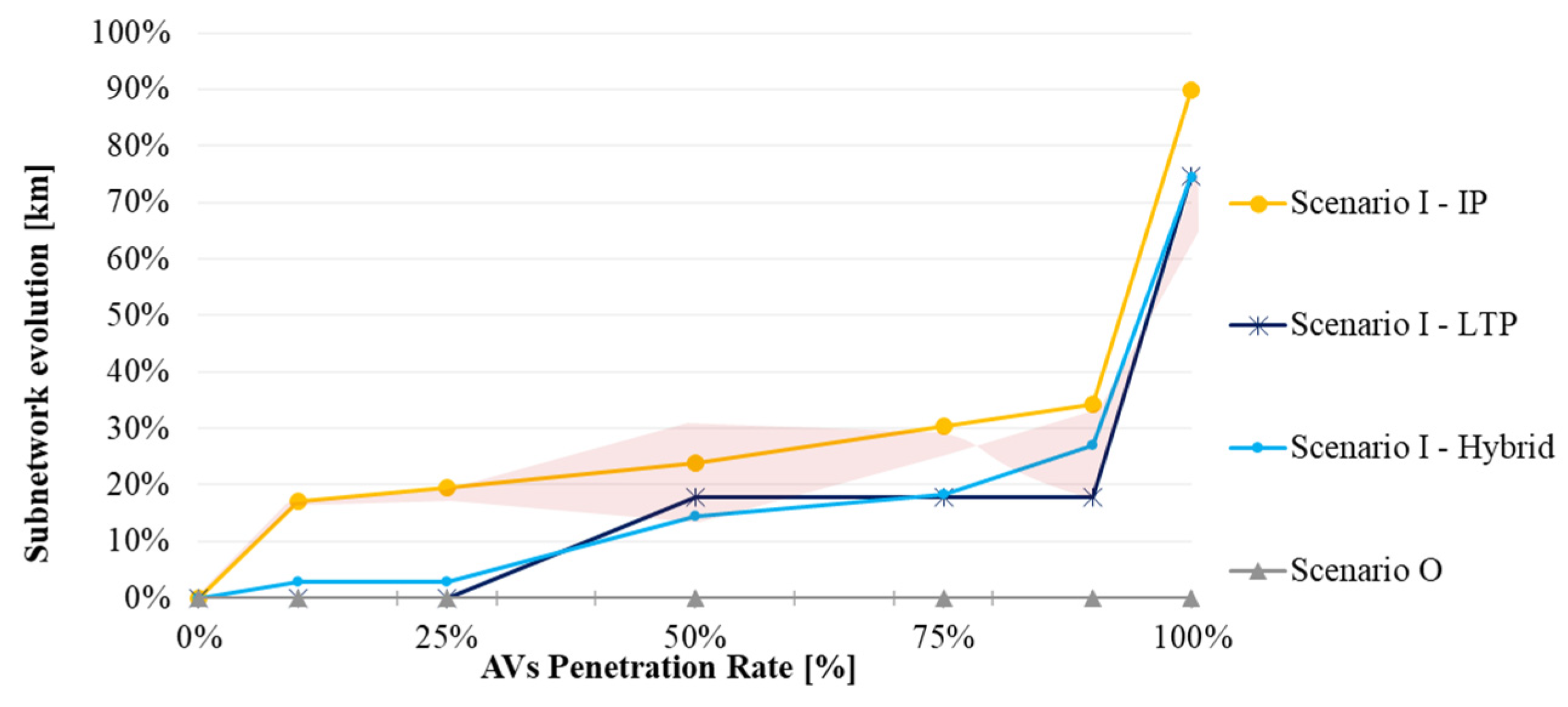
4.7. Planning Design Strategies Overview
5. Conclusions and Future Work
- The incremental planning should start in the initial stages around AV penetration rates of 25%. The IP starts selecting lower-capacity roads (lower speeds), which leads to expanded AV subnetworks towards the end of the transition period, producing less CV detouring.
- Long-term planning is a fair strategy in the second half of the transition period, i.e., when the initial design stages occur once AVs are already a majority. For an equal share between AVs and CVs (50%), CVs will experience high detouring and delays, but that effect will be highly mitigated in the second half of the period.
- Hybrid planning revealed satisfactory results, reducing CV delays throughout the entire transition period, and it can be used to help design AV subnetworks from the beginning. The main disadvantage of this strategy is the CV detouring (longer trips, longer distances) in the latest stages, once AVs reach 90% of the vehicle fleet.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Transport Safety Council. Prioritising the Safety Potential of Automated Driving in Europe; European Transport Safety Council: Brussels, Belgium, 2016; Volume 22, Available online: http://etsc.eu/automated-driving-report/ (accessed on 2 January 2024).
- Toroyan, T.; Peden, M.M.; Iaych, K. WHO launches second global status report on road safety. Inj. Prev. 2013, 19, 150. [Google Scholar] [CrossRef] [PubMed]
- Nieuwenhuijsen, J.; de Almeida Correia, G.H.; Milakis, D.; van Arem, B.; van Daalen, E. Towards a quantitative method to analyze the long-term innovation diffusion of automated vehicles technology using system dynamics. Transp. Res. Part C Emerg. Technol. 2018, 86, 300–327. [Google Scholar] [CrossRef]
- Calvert, S.C.; Van Arem, B.; Heikoop, D.D.; Hagenzieker, M.; Mecacci, G.; De Sio, F.S. Gaps in the Control of Automated Vehicles on Roads. IEEE Intell. Transp. Syst. Mag. 2021, 13, 146–153. [Google Scholar] [CrossRef]
- Shladover, S.E. Progressive Deployment Steps Toward an Automated Highway System. Transp. Res. Rec. 2000, 1727, 154–161. [Google Scholar] [CrossRef]
- SAE. Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems; SAE IntInternational: Warrendale, PA, USA, 2018; Volume J3016_2018, pp. 1–12. [Google Scholar]
- Haitao, H.; Menendez, M.; Ilgin Guler, S. Analytical evaluation of flexible-sharing strategies on multimodal arterials. Transp. Res. Part A Policy Pract. 2018, 114, 364–379. [Google Scholar] [CrossRef]
- de Almeida Correia, G.H.; van Arem, B. Solving the User Optimum Privately Owned Automated Vehicles Assignment Problem (UO-POAVAP): A model to explore the impacts of self-driving vehicles on urban mobility. Transp. Res. Part B Methodol. 2016, 87, 64–88. [Google Scholar] [CrossRef]
- Milakis, D.; van Arem, B.; van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. A. Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef]
- Calvert, S.C.; Van Den Broek, T.H.A.A.; Van Noort, M. Modelling cooperative driving in congestion shockwaves on a freeway network. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 614–619. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Zhang, K.; Nie, Y.M. Mitigating the impact of selfish routing: An optimal-ratio control scheme (ORCS) inspired by autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 87, 75–90. [Google Scholar] [CrossRef]
- Magnanti, T.L.; Wong, R.T. Network Design and Transportation Planning: Models and Algorithms. Transp. Sci. 1984, 18, 1–55. [Google Scholar] [CrossRef]
- Bertsekas, D. Network Optimization: Continuous and Discrete Models; Athena Scientific: Nashua, NH, USA, 1998. [Google Scholar]
- Chen, Z.; He, F.; Zhang, L.; Yin, Y. Optimal deployment of autonomous vehicle lanes with endogenous market penetration. Transp. Res. Part C Emerg. Technol. 2016, 72, 143–156. [Google Scholar] [CrossRef]
- National Academies of Sciences. TRB Dedicating Lanes for Priority or Exclusive Use by Connected and Automated Vehicles; National Academies of Sciences: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Chen, Z.; He, F.; Yin, Y.; Du, Y. Optimal design of autonomous vehicle zones in transportation networks. Transp. Res. Part B 2017, 99, 44–61. [Google Scholar] [CrossRef]
- Ye, Y.; Wang, H. Optimal Design of Transportation Networks with Automated Vehicle Links and Congestion Pricing. J. Adv. Transp. 2018, 2018, 3435720. [Google Scholar] [CrossRef]
- Madadi, B.; Van Nes, R.; Snelder, M.; Van Arem, B. Optimizing road networks for automated vehicles with dedicated links, dedicated lanes, and mixed-traffic subnetworks. J. Adv. Transp. 2021, 2021, 8853583. [Google Scholar] [CrossRef]
- Conceição, L.; Correia, G.; Tavares, J.P.J.P. The deployment of automated vehicles in urban transport systems: A methodology to design dedicated zones. In Proceedings of the Transportation Research Procedia; 20th EURO Working Group on Transportation Meeting, EWGT 2017, Budapest, Hungary, 4–6 September 2017; pp. 4–6. [Google Scholar] [CrossRef]
- Cantarella, G.E.; Di Febbraro, A.; Gangi, M.D.; Giannattasio, O. Solving stochastic assignment to transportation networks with TVs and AVs. Transp. Res. Procedia 2019, 42, 7–18. [Google Scholar] [CrossRef]
- Luathep, P.; Sumalee, A.; Lam, W.H.K.; Li, Z.C.; Lo, H.K. Global optimization method for mixed transportation network design problem: A mixed-integer linear programming approach. Transp. Res. Part B Methodol. 2011, 45, 808–827. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D. A multiclass cell transmission model for shared human and autonomous vehicle roads. Transp. Res. Part C Emerg. Technol. 2016, 62, 103–116. [Google Scholar] [CrossRef]
- Dafermos, S. Traffic Equilibrium and Variational Inequalities. Transp. Sci. 1980, 14, 42–54. [Google Scholar] [CrossRef]
- Florian, M.; Hearn, D. Network Equilibrium Models and Algorithms Michael. Handbooks Oper. Res. Manag. Sci. 1995, 8, 485–550. [Google Scholar] [CrossRef]
- Sheffi, Y. Urban Transportation Network; Pretince Hall: Kent, OH, USA, 1985; Volume 4. [Google Scholar]
- Toint, P.; Wynter, L. Asymmetric multiclass traffic assignment: A coherent formulation. In Proceedings of the 15th ISTTT Meet, Adelaide, Australia, 16–18 July 2002. [Google Scholar]
- Yap, M.D.; Correia, G.; van Arem, B. Preferences of travellers for using automated vehicles as last mile public transport of multimodal train trips. Transp. Res. Part A Policy Pract. 2016, 94, 1–16. [Google Scholar] [CrossRef]
- de Almeida Correia, G.H.; Looff, E.; van Cranenburgh, S.; Snelder, M.; van Arem, B. On the impact of vehicle automation on the value of travel time while performing work and leisure activities in a car: Theoretical insights and results from a stated preference survey. Transp. Res. Part A Policy Pract. 2019, 119, 359–382. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D. Effects of autonomous vehicle ownership on trip, mode, and route choice. Transp. Res. Rec. 2015, 2493, 29–38. [Google Scholar] [CrossRef]
- FICO. Getting Started with Xpress Release 8.1; FICO: Bozeman, MT, USA, 2017. [Google Scholar]
- Fair Isaac Corporation. XPress Solver—Nonlinear Reference Manual. 2019. Available online: https://www.fico.com/fico-xpress-optimization/docs/latest/solver/nonlinear/HTML/GUID-4B40E940-6A38-342F-9531-A13E84FB1467.html (accessed on 7 July 2019).
- Kronqvist, J.; Bernal, D.E.; Lundell, A.; Grossmann, I.E. A review and comparison of solvers for convex MINLP. Optim. Eng. 2019, 20, 397–455. [Google Scholar] [CrossRef]
- Wardrop, J.G. Road paper. Some theoretical aspects of road traffic research. ICE Proc. Eng. Div. 1952, 1, 325–362. [Google Scholar] [CrossRef]
- Beckman, D.J.R.M.; McGuire, C.B.; Winsten, C.B.; Koopmans, T.C. Studies in the Economics of Transportation. OR 1956. [Google Scholar]
- Daganzo, C.F. Stochastic network equilibrium with multiple vehicle types and asymmetric, indefinite link cost jacobians. Transp. Sci. 1983, 17, 282–300. [Google Scholar] [CrossRef]
- Cantarella, G.E. A general fixed-point approach to multimode multi-user equilibrium assignment with elastic demand. Transp. Sci. 1997, 31, 107–128. [Google Scholar] [CrossRef]
- Efthymiou, D.; Chrysostomou, K.; Morfoulaki, M.; Aifantopoulou, G. Electric vehicles charging infrastructure location: A genetic algorithm approach. Eur. Transp. Res. Rev. 2017, 9, 27. [Google Scholar] [CrossRef]
- Brenna, M.; Lazaroiu, G.C.; Roscia, M.; Saadatmandi, S. Dynamic Model for the EV’s Charging Infrastructure Planning through Finite Element Method. IEEE Access 2020, 8, 102399–102408. [Google Scholar] [CrossRef]
- Wang, X.; Sun, C.; Wang, R.; Wei, T. Two-Stage Optimal Scheduling Strategy for Large-Scale Electric Vehicles. IEEE Access 2020, 8, 13821–13832. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Base Scenario RNDP-AVs without AV Subnetworks | Objective Function | Network | Congestion 1 | Travel Times | Delay 2 | Travel Distances | Computational Time | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Generalised Costs | Dedicated Roads | Network Congestion | Average Degree of Saturation (DS) | Roadways above Practical Capacity (DS ≥ 75%) | Congested Roadways (DS ≥ 100%) | Peak-Hour Network Congestion | Peak-Hour Average Degree of Saturation | AV Trips | CV Trips | Total Travel Times | AV Trips | CV Trips | Total Delay | AV Trips | CV Trips | Total Distance | Each Stage | The Whole Scenario | |||
| AV Penetration Rate | [€] | [no.] | [km] | [%] | [%] | [km] | [km] | [%] | [%] | [h veh] | [h veh] | [h veh] | [h veh] | [h veh] | [h veh] | [%] | [%] | [km veh] | [h:m:s] | [h:m:s] | |
| Optimality at each stage | 0% | 85,277.35 | - | - | 11% | 43% | 86.67 | 13.95 | 25% | 58% | 0 | 8915 | 8915 | 0 | 484 | 484 | 0.0% | 100.0% | 468,258 | 00:00:44 | 00:06:43 |
| 10% | 85,090.08 | - | - | 11% | 43% | 86.67 | 13.95 | 25% | 58% | 891 | 8021 | 8912 | 48 | 433 | 481 | 10.0% | 90.0% | 468,248 | 00:01:13 | ||
| 25% | 83,769.55 | - | - | 11% | 42% | 86.67 | 13.32 | 25% | 57% | 2221 | 6663 | 8884 | 113 | 340 | 453 | 25.0% | 75.0% | 468,192 | 00:01:25 | ||
| 50% | 77,637.04 | - | - | 10% | 39% | 80.63 | 10.03 | 23% | 53% | 4386 | 4386 | 8772 | 171 | 171 | 342 | 50.0% | 50.0% | 468,112 | 00:00:48 | ||
| 75% | 66,235.24 | - | - | 9% | 33% | 15.77 | 4.33 | 20% | 45% | 6462 | 2154 | 8616 | 141 | 47 | 188 | 75.0% | 25.0% | 467,848 | 00:01:03 | ||
| 90% | 57,220.23 | - | - | 7% | 29% | 10.03 | 3.07 | 17% | 39% | 7681 | 853 | 8534 | 95 | 11 | 106 | 90.0% | 10.0% | 467,735 | 00:00:53 | ||
| 100% | 50,568.89 | - | - | 7% | 25% | 4.99 | 1.46 | 15% | 34% | 8511 | 0 | 8511 | 68 | 0 | 68 | 100.0% | 0.0% | 465,944 | 00:00:37 | ||
| Base Scenario RNDP-AVs without AV Subnetworks | Objective Function | Network | Congestion 1 | Travel Times | Delay 2 | Travel Distances | Computational Time | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Generalised Costs | Dedicated Roads | Network Congestion | Average Degree of Saturation (DS) | Roadways above Practical Capacity (DS ≥ 75%) | Congested Roadways (DS ≥ 100%) | AV Trips | CV Trips | Total Travel Times | AV Trips | CV Trips | Total Delay | AV Trips | CV Trips | Total Distance | Each Stage | The Whole Scenario | |||
| AV Penetration Rate | [€] | [no.] | [km] | [%] | [%] | [km] | [km] | [h veh] | [h veh] | [h veh] | [h veh] | [h veh] | [h veh] | [%] | [%] | [km veh] | [h:m:s] | [h:m:s] | |
| Optimality at each stage | 0% | 10,655.14 | 0 | 0.00 | 24% | 47% | 15.15 | 4.82 | 0 | 1164 | 1164 | 0 | 123 | 123 | 0.0% | 100.0% | 68,605 | 00:00:01 | 02:01:07 |
| 10% | 10,580.61 | 11 | 30.51 | 23% | 41% | 13.98 | 4.82 | 121 | 1042 | 1164 | 10 | 106 | 116 | 10.9% | 89.1% | 69,027 | 00:22:06 | ||
| 25% | 10,329.44 | 13 | 32.31 | 24% | 40% | 13.94 | 6.58 | 299 | 868 | 1167 | 24 | 88 | 112 | 25.5% | 74.5% | 71,462 | 00:17:11 | ||
| 50% | 9440.45 | 12 | 25.80 | 22% | 39% | 11.19 | 6.06 | 582 | 576 | 1157 | 49 | 55 | 104 | 48.9% | 51.1% | 69,446 | 00:47:50 | ||
| 75% | 7979.94 | 22 | 46.07 | 18% | 32% | 11.89 | 4.82 | 829 | 298 | 1127 | 49 | 23 | 72 | 70.8% | 29.2% | 71,445 | 00:25:13 | ||
| 90% | 7162.51 | 23 | 59.33 | 17% | 31% | 4.00 | 2.75 | 963 | 131 | 1094 | 26 | 4 | 30 | 86.9% | 13.1% | 70,554 | 00:08:44 | ||
| 100% | 6241.97 | 42 | 114.41 | 14% | 29% | 2.75 | 0.00 | 1057 | 0 | 1057 | 16 | 0 | 16 | 100.0% | 0.0% | 68,559 | 00:00:02 | ||
| Daily Scenario RNDP-AVs with AV Subnetworks | Objective Function | Network | Congestion 1 | Travel Times | Delay 2 | Travel Distances | Computational Time | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Generalised Costs | Dedicated Roads | Network Congestion | Average Degree of Saturation (DS) | Roadways above Practical Capacity (DS ≥ 75%) | Congested Roadways (DS ≥ 100%) | Peak-Hour Network Congestion | Peak-Hour Average Degree of Saturation | AV Trips | CV Trips | Total Travel Times | AV Trips | CV Trips | Total Delay | AV Trips | CV Trips | Total Distance | Each Stage | The Whole Scenario | |||
| AV Penetration Rate | [€] | [no.] | [km] | [%] | [%] | [km] | [km] | [%] | [%] | [h veh] | [h veh] | [h veh] | [h veh] | [h veh] | [h veh] | [%] | [%] | [km veh] | [h:m:s] | [h:m:s] | |
| Optimality at each stage | 0% | 85,277.28 | 0 | 0.00 | 11% | 43% | 86.67 | 13.95 | 25% | 58% | 0 | 8915 | 8915 | 0 | 484 | 484 | 0.0% | 100.0% | 468,271 | 00:00:59 | 23:31:52 |
| 10% | 84,974.76 | 9 | 30.54 | 11% | 38% | 87.80 | 13.95 | 25% | 55% | 903 | 8017 | 8920 | 47 | 430 | 477 | 10.0% | 90.0% | 468,166 | 00:25:45 | ||
| 25% | 83,484.38 | 10 | 34.68 | 11% | 38% | 83.82 | 21.46 | 25% | 56% | 2281 | 6748 | 9029 | 116 | 423 | 539 | 24.7% | 75.3% | 470,325 | 04:06:50 | ||
| 50% | 77,056.81 | 17 | 56.09 | 10% | 33% | 74.95 | 11.80 | 23% | 50% | 4427 | 4580 | 9007 | 170 | 230 | 400 | 48.7% | 51.3% | 475,806 | 16:07:06 | ||
| 75% | 65,484.03 | 15 | 51.89 | 9% | 28% | 19.35 | 4.33 | 19% | 42% | 6479 | 2223 | 8702 | 130 | 48 | 178 | 74.0% | 26.0% | 470,098 | 09:17:31 | ||
| 90% | 56,860.36 | 9 | 31.71 | 7% | 26% | 8.28 | 3.07 | 17% | 38% | 7679 | 880 | 8559 | 94 | 10 | 104 | 89.6% | 10.4% | 468,554 | 17:32:50 | ||
| 100% | 50,568.89 | 49 | 133.11 | 7% | 25% | 4.99 | 1.46 | 15% | 34% | 8511 | 0 | 8511 | 68 | 0 | 68 | 100.0% | 0.0% | 465,944 | 00:00:51 | ||
| Incremental Planning | 0% | 85,277.25 | 0 | 0.00 | 11% | 43% | 86.67 | 13.95 | 25% | 58% | 0 | 8915 | 8915 | 0 | 485 | 485 | 0.0% | 100.0% | 468,227 | 00:00:59 | 07:56:45 |
| 10% | 84,974.78 | 9 | 30.54 | 11% | 38% | 86.05 | 13.95 | 25% | 55% | 903 | 8016 | 8919 | 47 | 429 | 475 | 10.0% | 90.0% | 468,136 | 03:27:06 | ||
| 25% | 83,484.38 | 10 | 34.68 | 11% | 38% | 83.82 | 21.46 | 25% | 56% | 2281 | 6748 | 9029 | 116 | 423 | 539 | 24.7% | 75.3% | 470,325 | 02:23:13 | ||
| 50% | 77,088.29 | 11 | 42.52 | 10% | 36% | 84.81 | 12.26 | 23% | 51% | 4409 | 4431 | 8840 | 172 | 191 | 363 | 49.4% | 50.6% | 469,374 | 01:40:39 | ||
| 75% | 65,765.61 | 14 | 54.08 | 9% | 29% | 19.35 | 4.33 | 20% | 44% | 6492 | 2232 | 8724 | 132 | 48 | 180 | 74.4% | 25.6% | 468,746 | 00:17:51 | ||
| 90% | 57,023.08 | 17 | 61.15 | 7% | 25% | 8.28 | 3.07 | 17% | 39% | 7680 | 895 | 8576 | 95 | 10 | 105 | 89.6% | 10.4% | 468,411 | 00:06:05 | ||
| 100% | 50,569.17 | 57 | 160.40 | 7% | 24% | 4.99 | 1.46 | 15% | 34% | 8511 | 0 | 8511 | 68 | 0 | 68 | 100.0% | 0.0% | 465,945 | 00:00:52 | ||
| Long-Term Reversal Planning | 0% | 85,277.52 | 0 | 0.00 | 11% | 43% | 86.67 | 14.44 | 25% | 58% | 0 | 8915 | 8915 | 0 | 484 | 484 | 0.0% | 100.0% | 468,283 | 00:00:47 | 03:26:30 |
| 10% | 85,090.08 | 0 | 0.00 | 11% | 43% | 86.67 | 13.95 | 25% | 58% | 891 | 8021 | 8912 | 48 | 433 | 481 | 10.0% | 90.0% | 468,248 | 00:00:59 | ||
| 25% | 83,769.48 | 0 | 0.00 | 11% | 42% | 86.67 | 13.32 | 25% | 57% | 2221 | 6663 | 8885 | 114 | 341 | 454 | 25.0% | 75.0% | 468,178 | 00:07:42 | ||
| 50% | 77,303.68 | 9 | 31.71 | 10% | 36% | 76.03 | 11.80 | 23% | 53% | 4418 | 4578 | 8996 | 169 | 228 | 397 | 48.9% | 51.1% | 477,399 | 00:04:00 | ||
| 75% | 65,561.16 | 9 | 31.71 | 9% | 30% | 20.52 | 4.33 | 19% | 45% | 6452 | 2223 | 8676 | 132 | 48 | 180 | 74.1% | 25.9% | 471,808 | 00:01:36 | ||
| 90% | 56,860.36 | 9 | 31.71 | 7% | 26% | 8.28 | 3.07 | 17% | 38% | 7679 | 880 | 8559 | 94 | 10 | 104 | 89.6% | 10.4% | 468,554 | 03:10:35 | ||
| 100% | 50,568.89 | 49 | 133.11 | 7% | 25% | 4.99 | 1.46 | 15% | 34% | 8511 | 0 | 8511 | 68 | 0 | 68 | 100.0% | 0.0% | 465,944 | 00:00:51 | ||
| Hybrid Planning | 0% | 85,277.28 | 0 | 0.00 | 11% | 43% | 86.67 | 13.95 | 25% | 58% | 0 | 8915 | 8915 | 0 | 484 | 484 | 0.0% | 100.0% | 468,271 | 00:00:59 | 12:29:02 |
| 10% | 85,069.34 | 2 | 5.25 | 11% | 41% | 88.42 | 13.95 | 25% | 58% | 892 | 8020 | 8912 | 48 | 432 | 480 | 10.0% | 90.0% | 468,115 | 02:12:51 | ||
| 25% | 83,726.86 | 2 | 5.25 | 11% | 41% | 86.33 | 13.80 | 25% | 57% | 2223 | 6661 | 8884 | 112 | 338 | 450 | 25.0% | 75.0% | 467,993 | 02:11:05 | ||
| 50% | 77,498.24 | 7 | 25.93 | 10% | 36% | 82.11 | 10.03 | 23% | 52% | 4396 | 4442 | 8838 | 171 | 177 | 349 | 49.5% | 50.5% | 471,494 | 06:11:52 | ||
| 75% | 65,780.86 | 10 | 32.82 | 9% | 29% | 19.35 | 4.33 | 19% | 45% | 6459 | 2223 | 8682 | 132 | 48 | 180 | 74.1% | 25.9% | 471,241 | 01:32:54 | ||
| 90% | 56,900.20 | 17 | 48.34 | 7% | 23% | 8.28 | 3.07 | 17% | 35% | 7679 | 909 | 8588 | 94 | 10 | 104 | 89.1% | 10.9% | 470,949 | 00:18:29 | ||
| 100% | 50,568.89 | 49 | 133.11 | 7% | 25% | 4.99 | 1.46 | 15% | 34% | 8511 | 0 | 8511 | 68 | 0 | 68 | 100.0% | 0.0% | 465,944 | 00:00:52 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Conceição, L.; Correia, G.H.d.A.; van Arem, B.; Tavares, J.P. The Road Network Design Problem for the Deployment of Automated Vehicles (RNDP-AVs): A Nonlinear Programming Mathematical Model. Infrastructures 2024, 9, 12. https://doi.org/10.3390/infrastructures9010012
Conceição L, Correia GHdA, van Arem B, Tavares JP. The Road Network Design Problem for the Deployment of Automated Vehicles (RNDP-AVs): A Nonlinear Programming Mathematical Model. Infrastructures. 2024; 9(1):12. https://doi.org/10.3390/infrastructures9010012
Chicago/Turabian StyleConceição, Lígia, Gonçalo Homem de Almeida Correia, Bart van Arem, and José Pedro Tavares. 2024. "The Road Network Design Problem for the Deployment of Automated Vehicles (RNDP-AVs): A Nonlinear Programming Mathematical Model" Infrastructures 9, no. 1: 12. https://doi.org/10.3390/infrastructures9010012