Surface Rust Detection Using Ultrasonic Waves in a Cylindrical Geometry by Finite Element Simulation



Abstract
:
1. Introduction
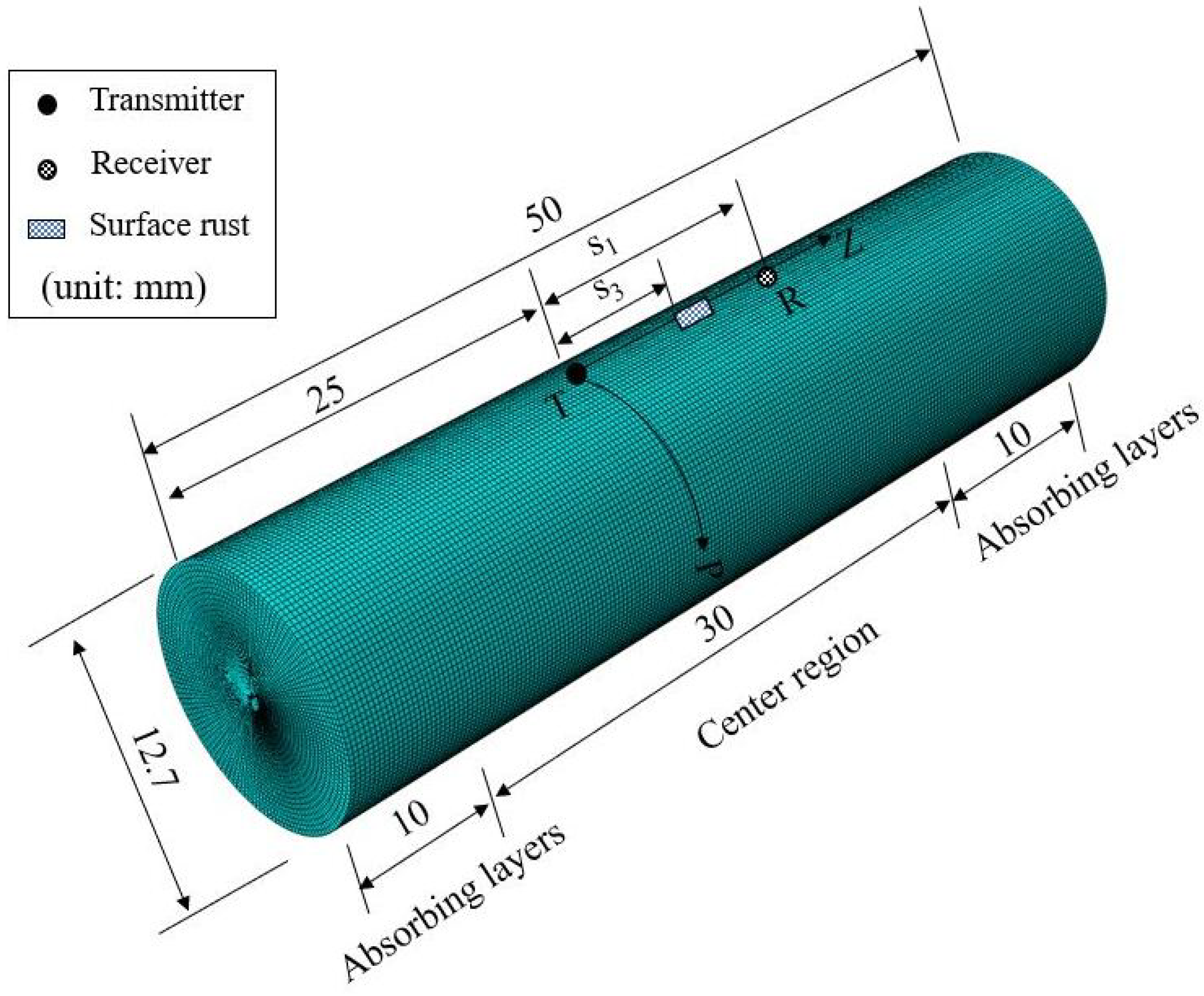
2. Finite Element Simulation
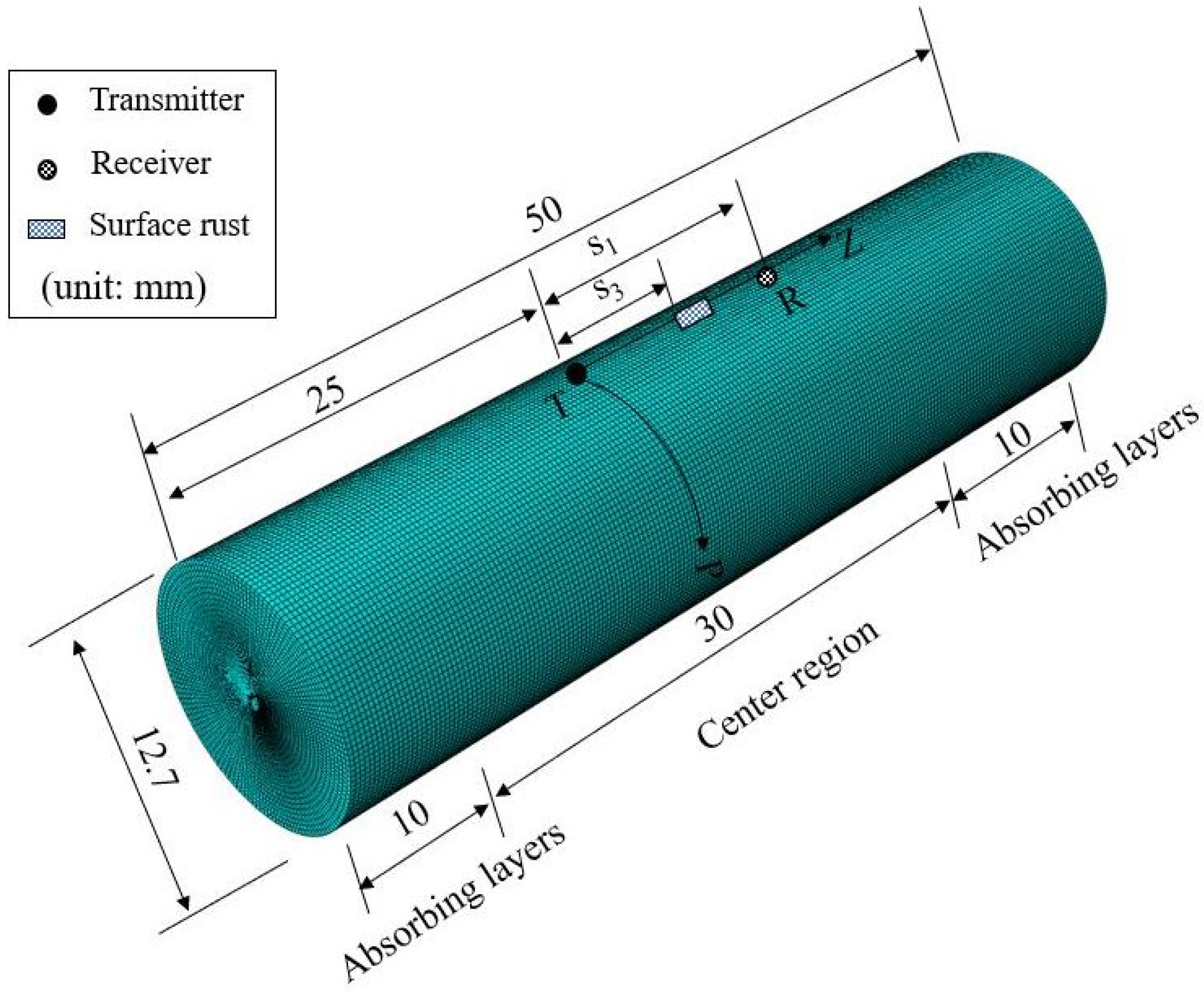
2.1. Intact Steel Rod Model
2.2. Corroded Steel Rod Models
3. Research Hypotheses and Approach
3.1. Hypotheses of Ultrasonic Wave Propagation in Intact and Corroded Rod Models
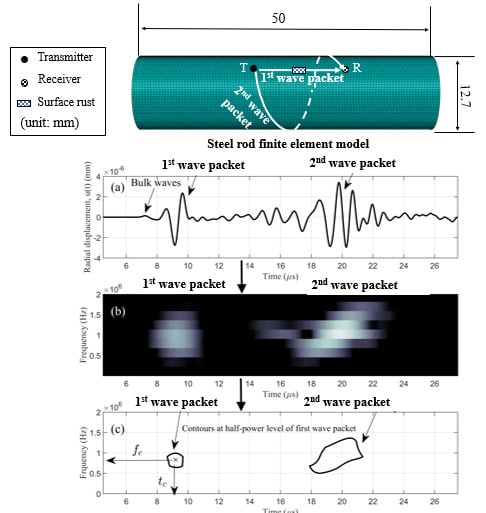
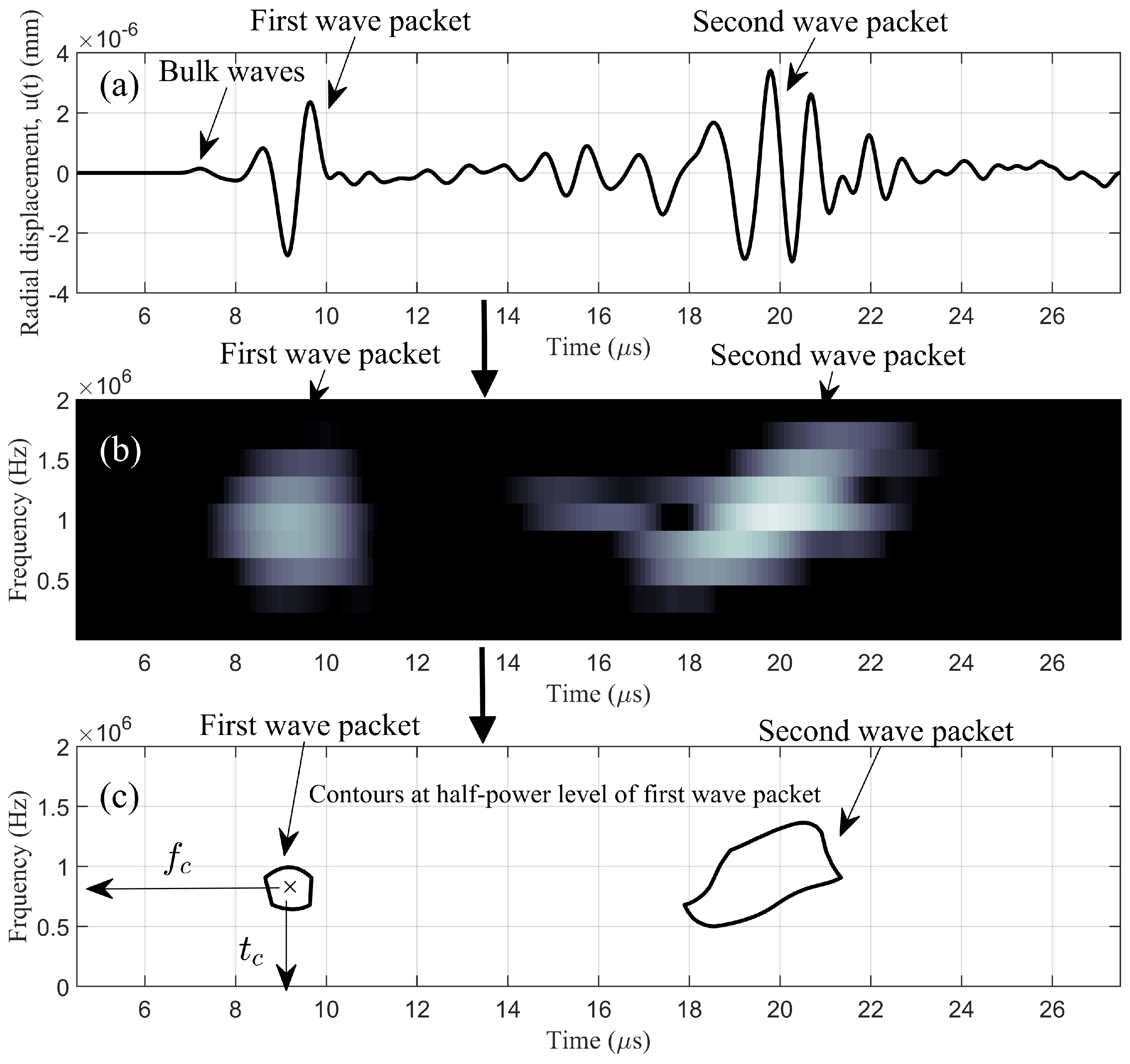
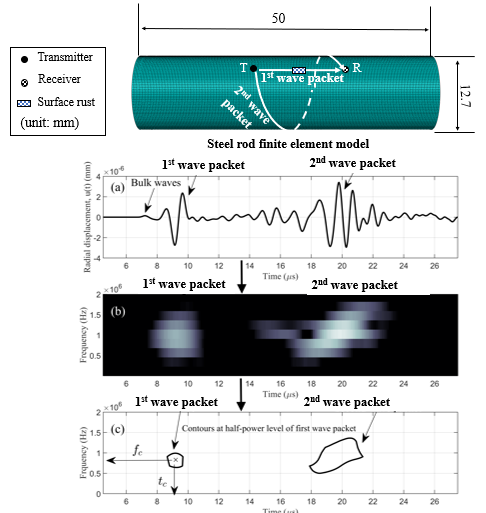
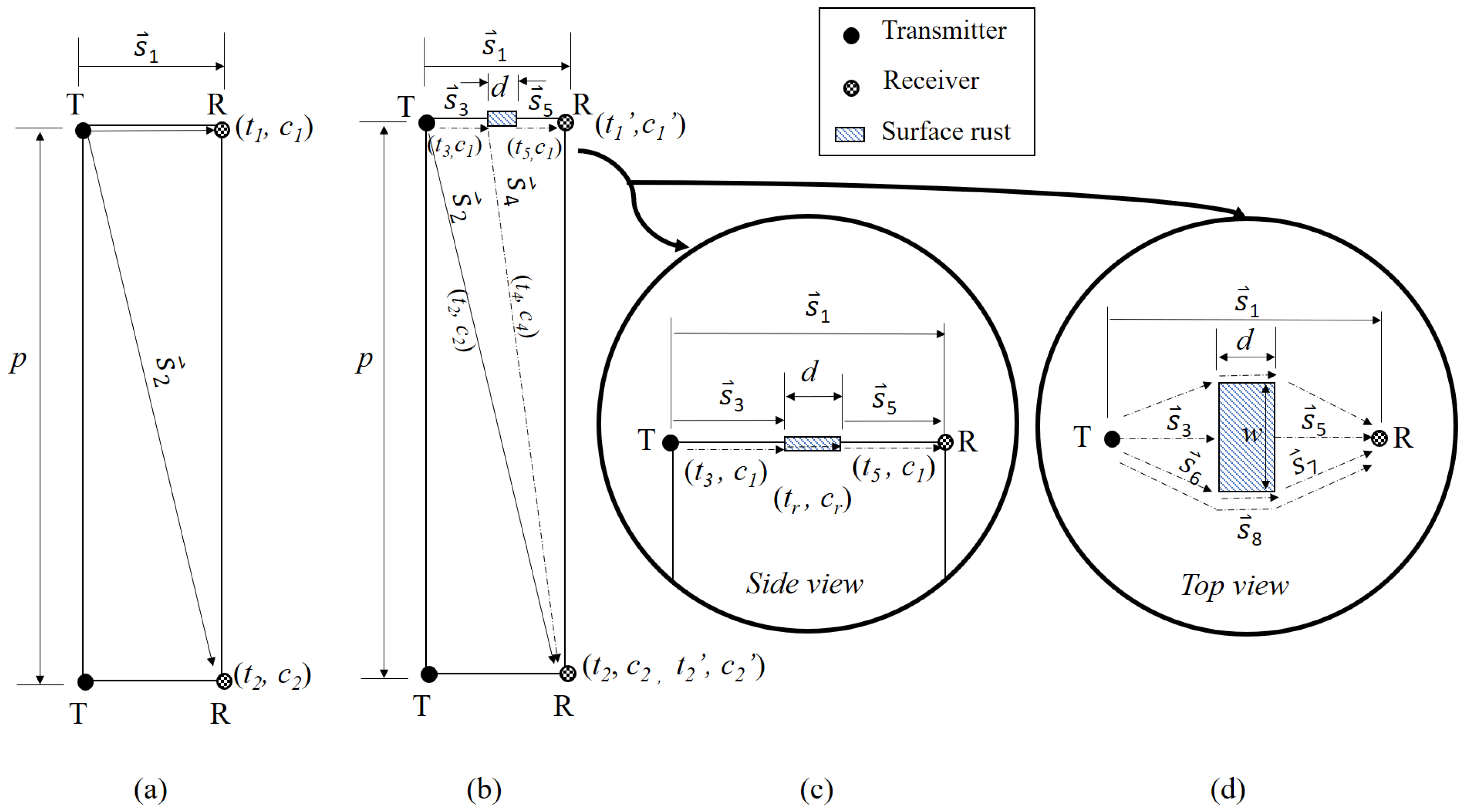
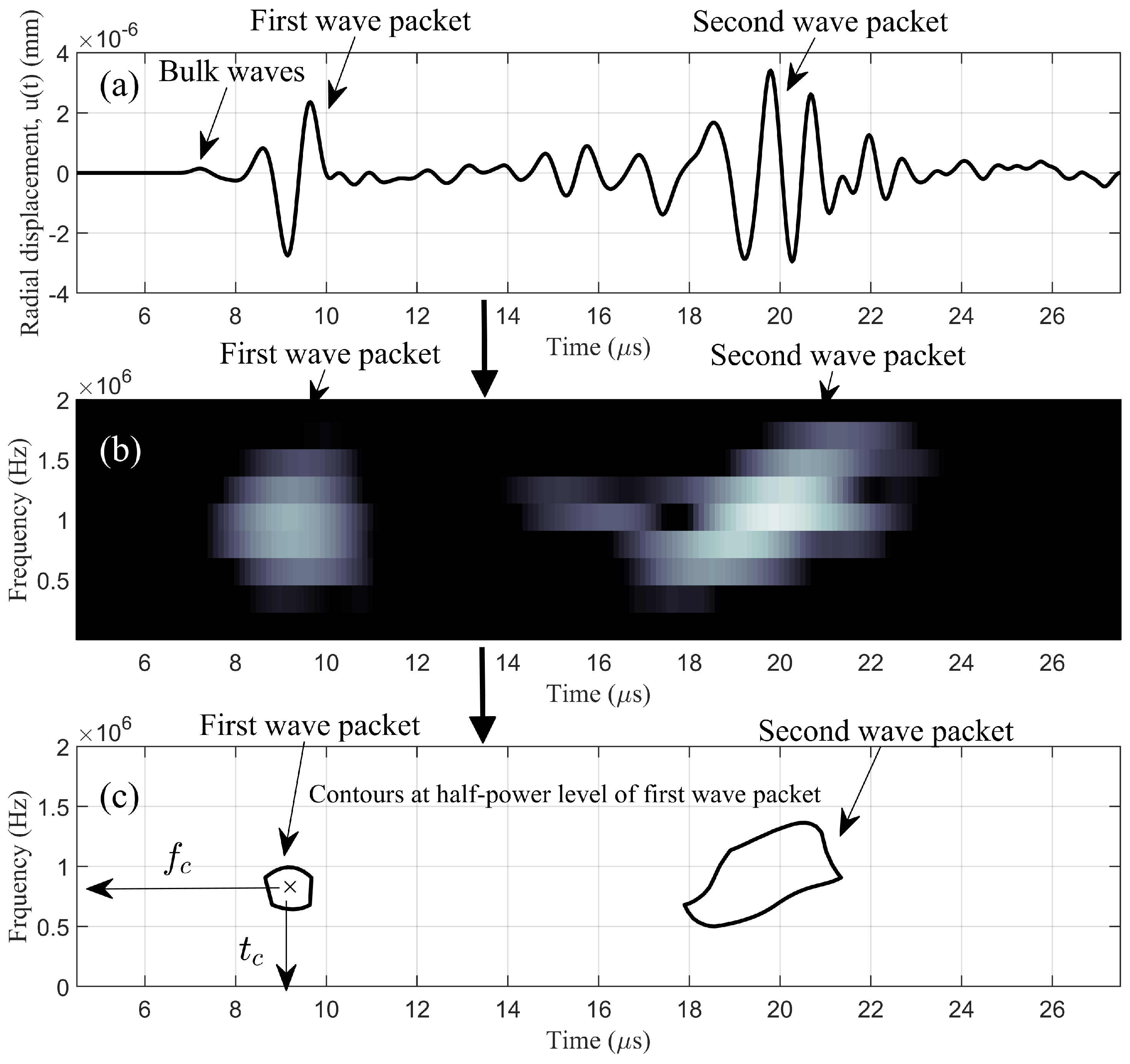
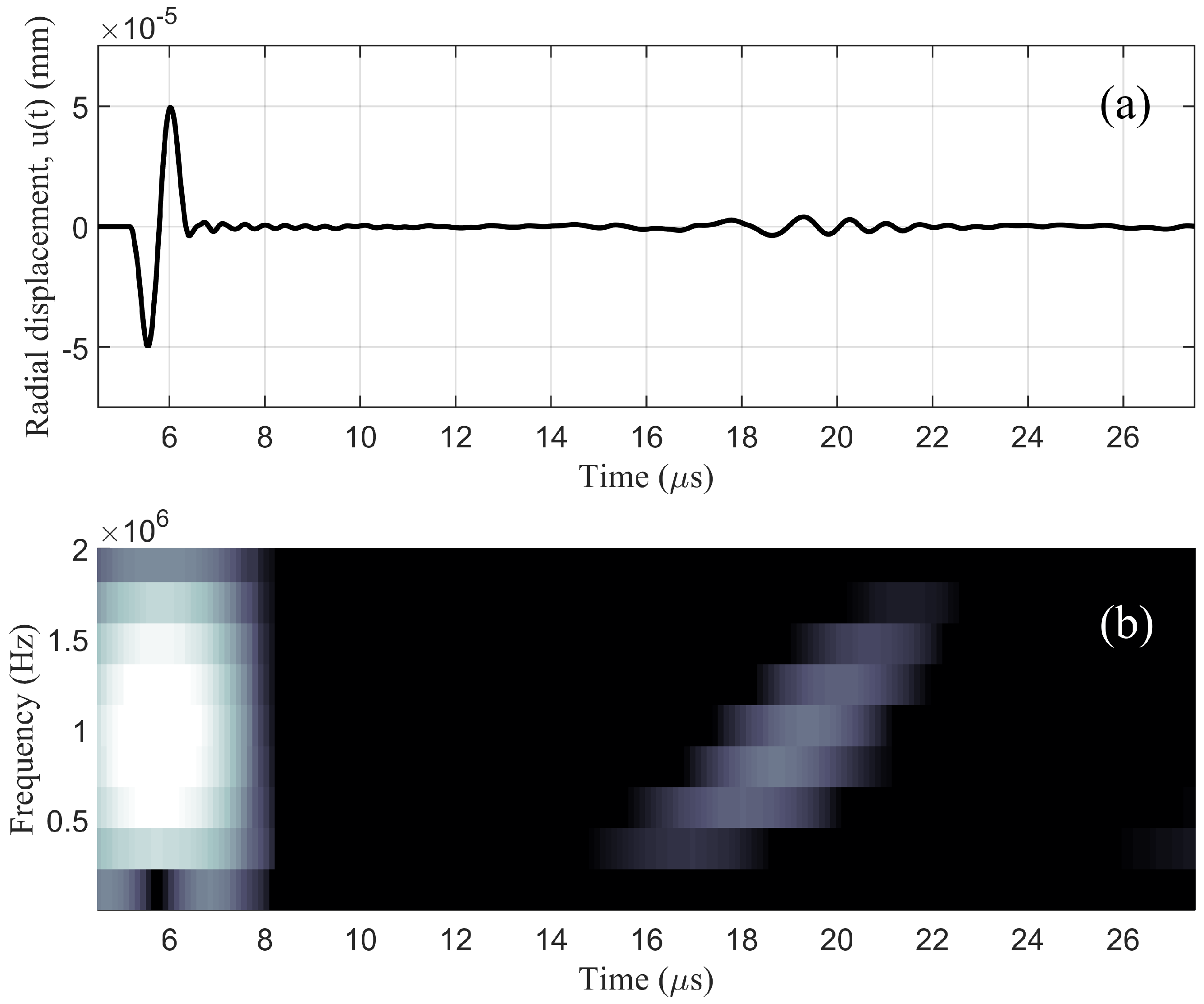
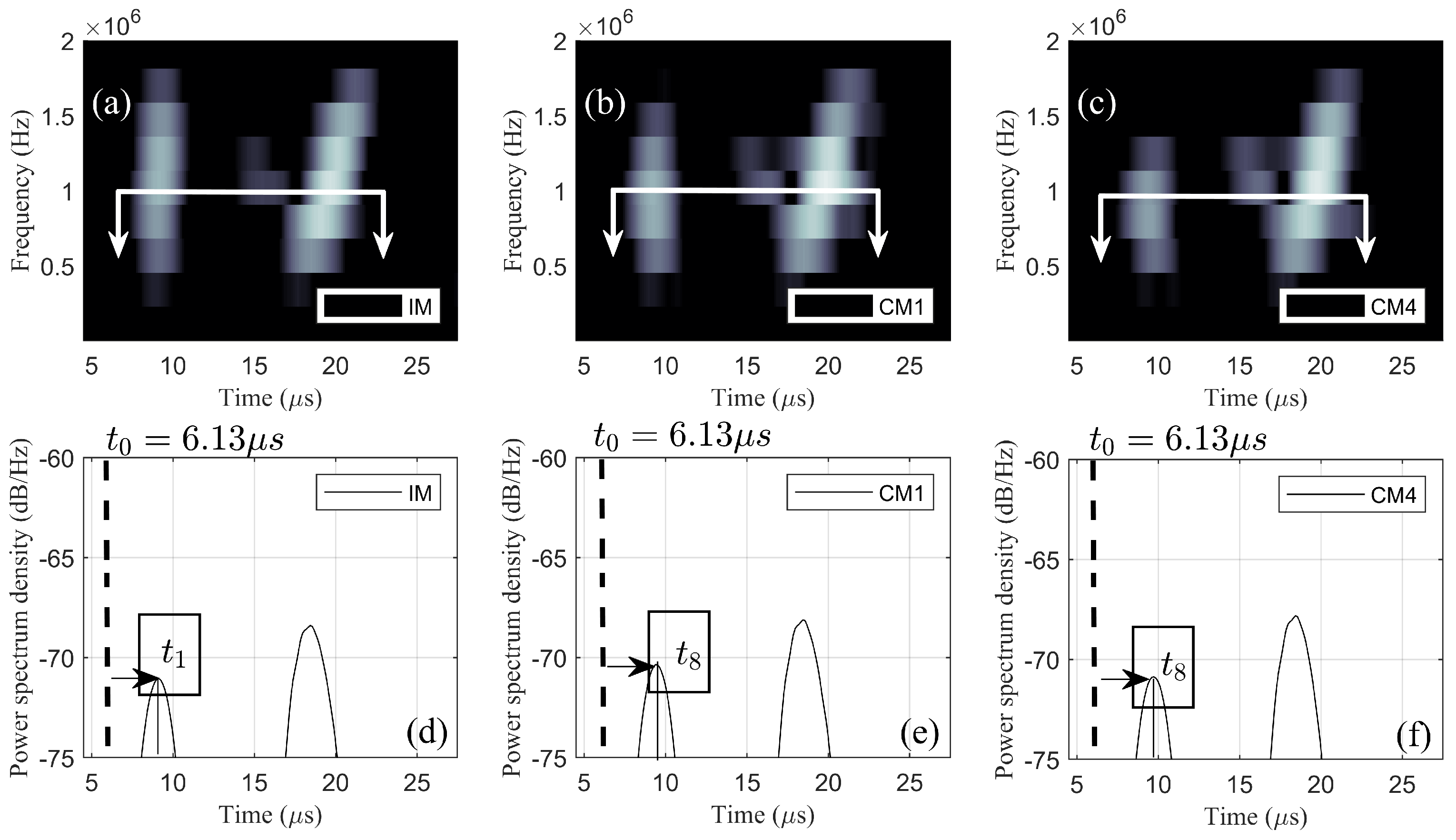
- In the intact steel rod model, the time domain radial displacement is collected at R. The first ultrasonic wave packet is the one propagating along the path at a velocity of and arriving at time . The second ultrasonic wave packet propagates along the path and arrives at time with a velocity of . Both the first and the second wave packets are surface waves (fundamental mode of Rayleigh waves). These surface waves were chosen for surface rust detection, rather than bulk waves [28] and guided waves [29], because bulk waves attenuate much faster than surface waves, and guided waves require multiple sensors to be in place.
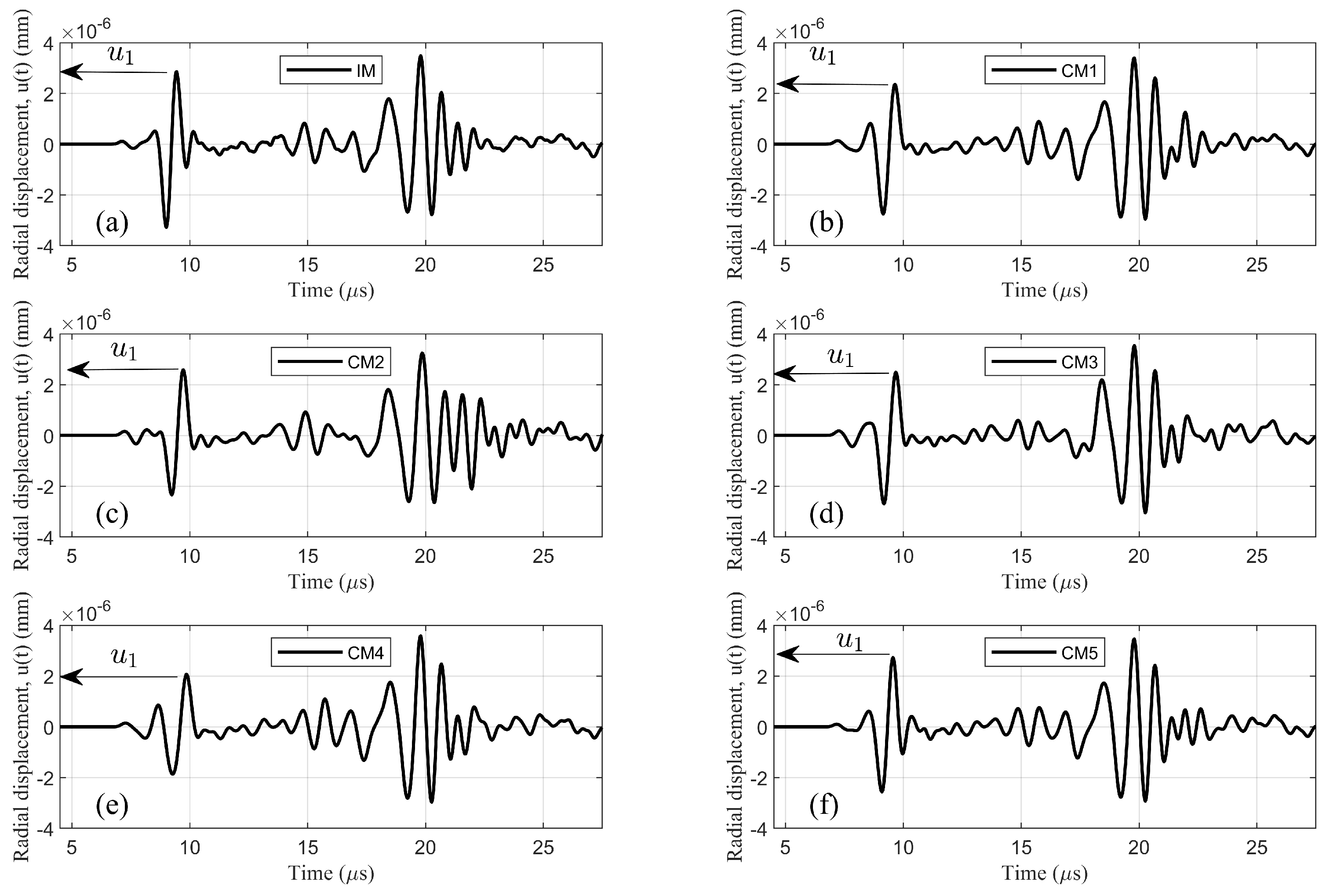
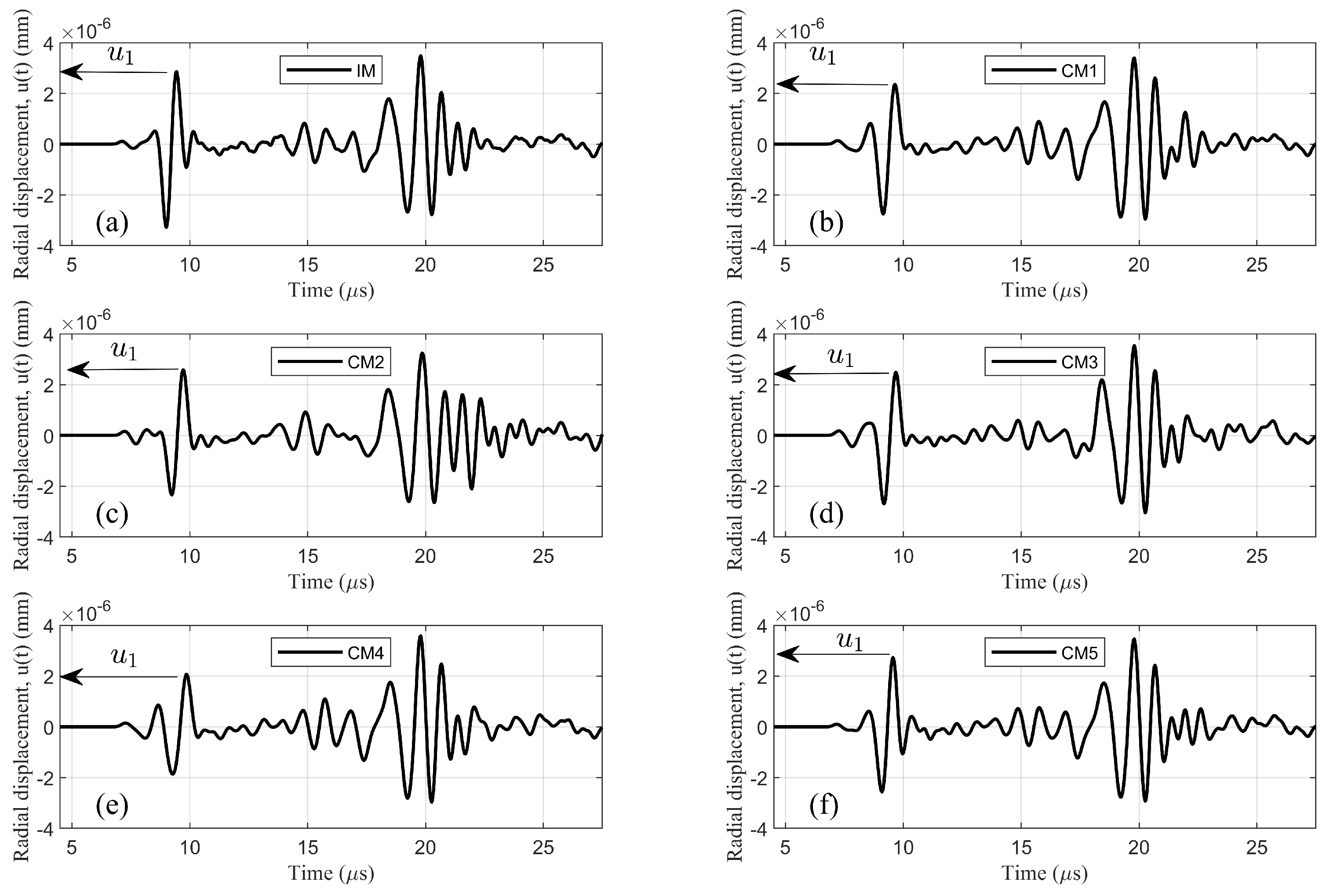
- In the corroded steel rod models (CM1~CM5), the ultrasonic waves propagating along the path are affected by the presence of surface rust. As shown in Figure 3c, some of the ultrasonic waves propagate through the surface rust and arrive at time (i.e., > , since the ultrasonic wave velocity is slower in rust than it is in steel).
- Some of the ultrasonic waves are scattered from the surface rust and propagate along the path . Time is the total time of flight (TOF) of the scattered ultrasonic wave propagating along path (). The propagation velocities of ultrasonic waves on path and path are respectively and .
- In Figure 3d, path is the path of ultrasonic waves diffracted by the surface rust (). TOF of these ultrasonic waves is (i.e., ).
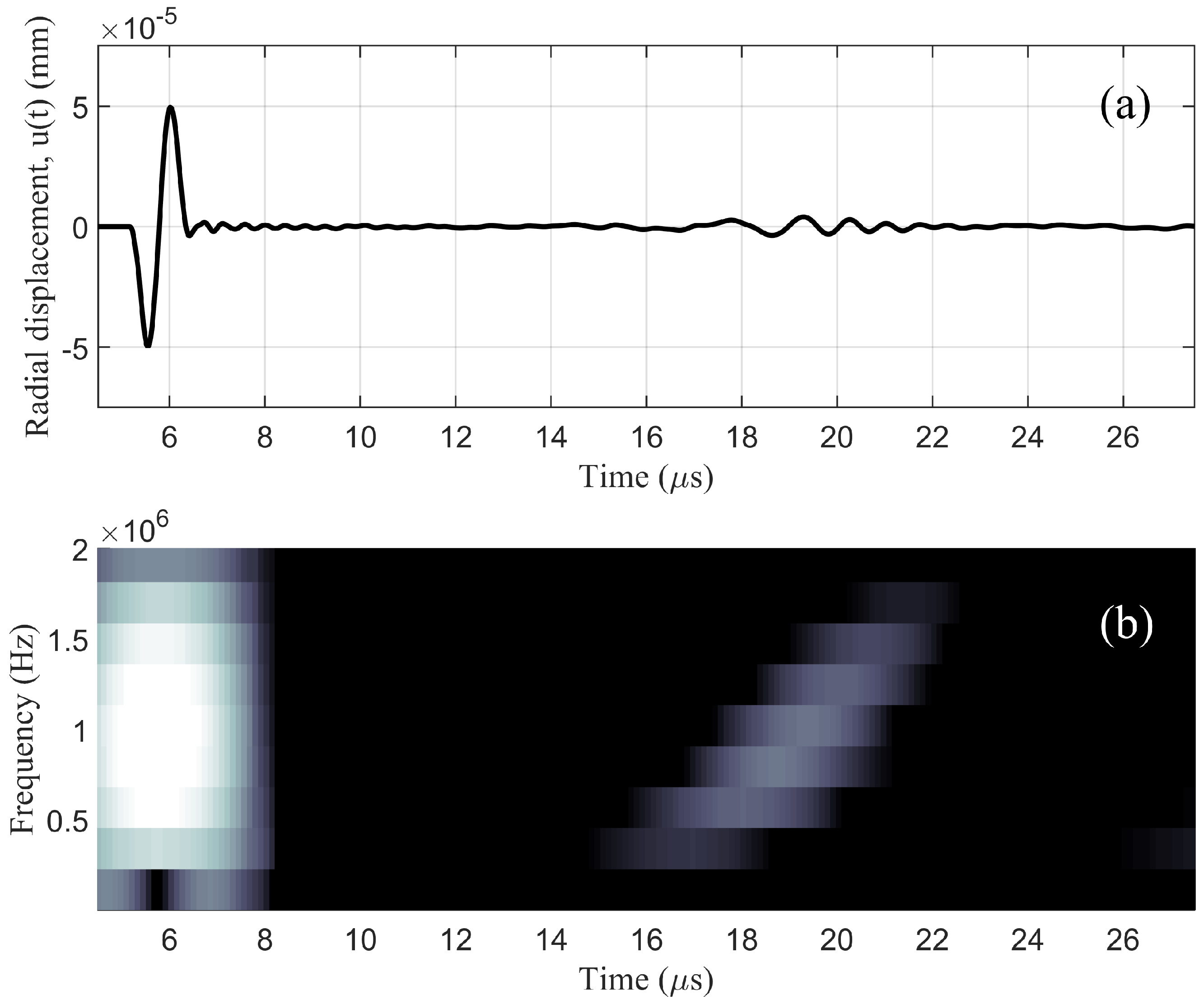
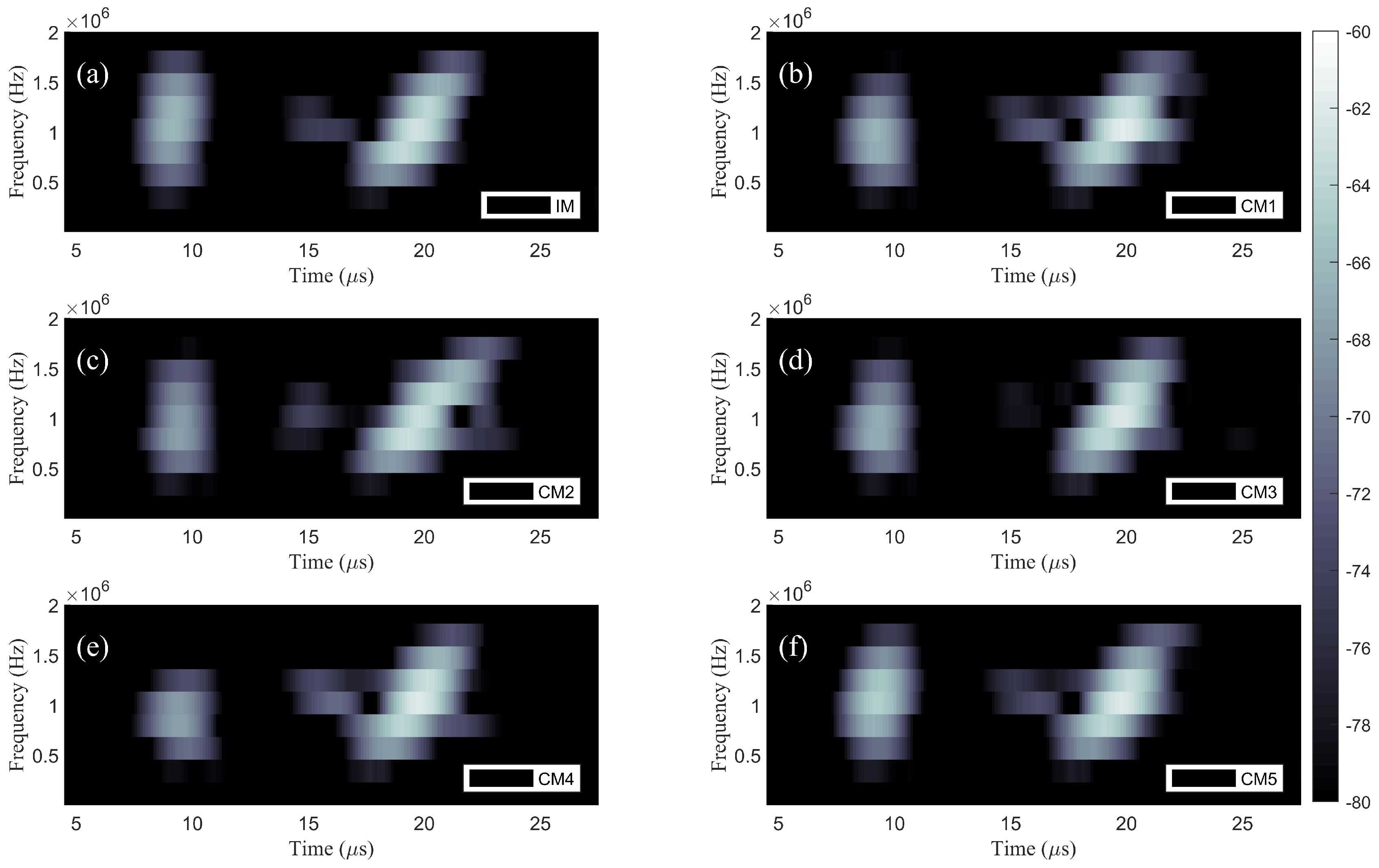
- Higher frequencies are affected more than lower frequencies by the presence of surface rust. This is because the effective depth of each frequency is approximately its wavelength [30]. With a ‘shallow’ effective depth, higher frequencies interact with the surface rust more than lower frequencies.
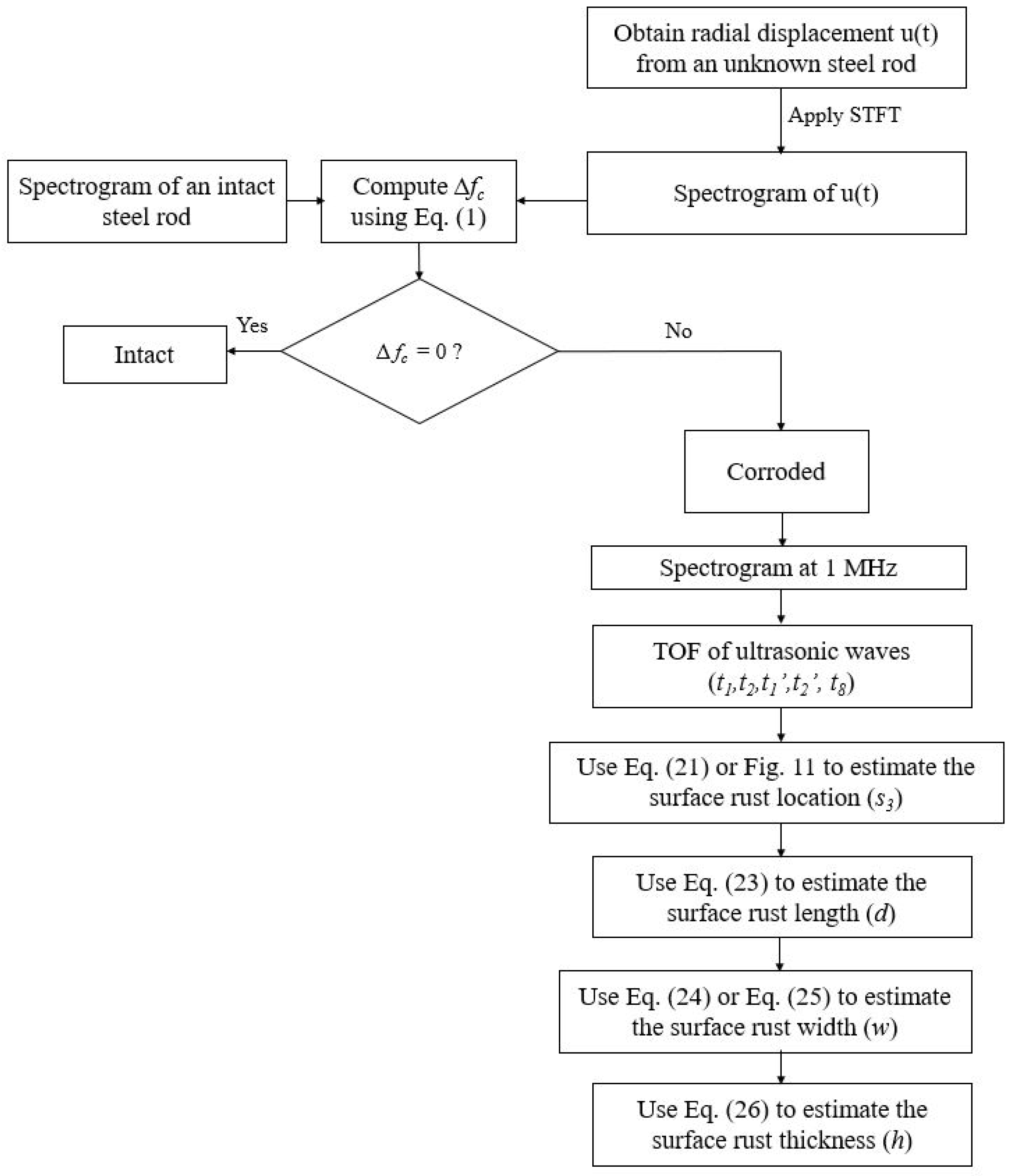
3.2. Damage Detection Algorithm
3.2.1. Damage Detection
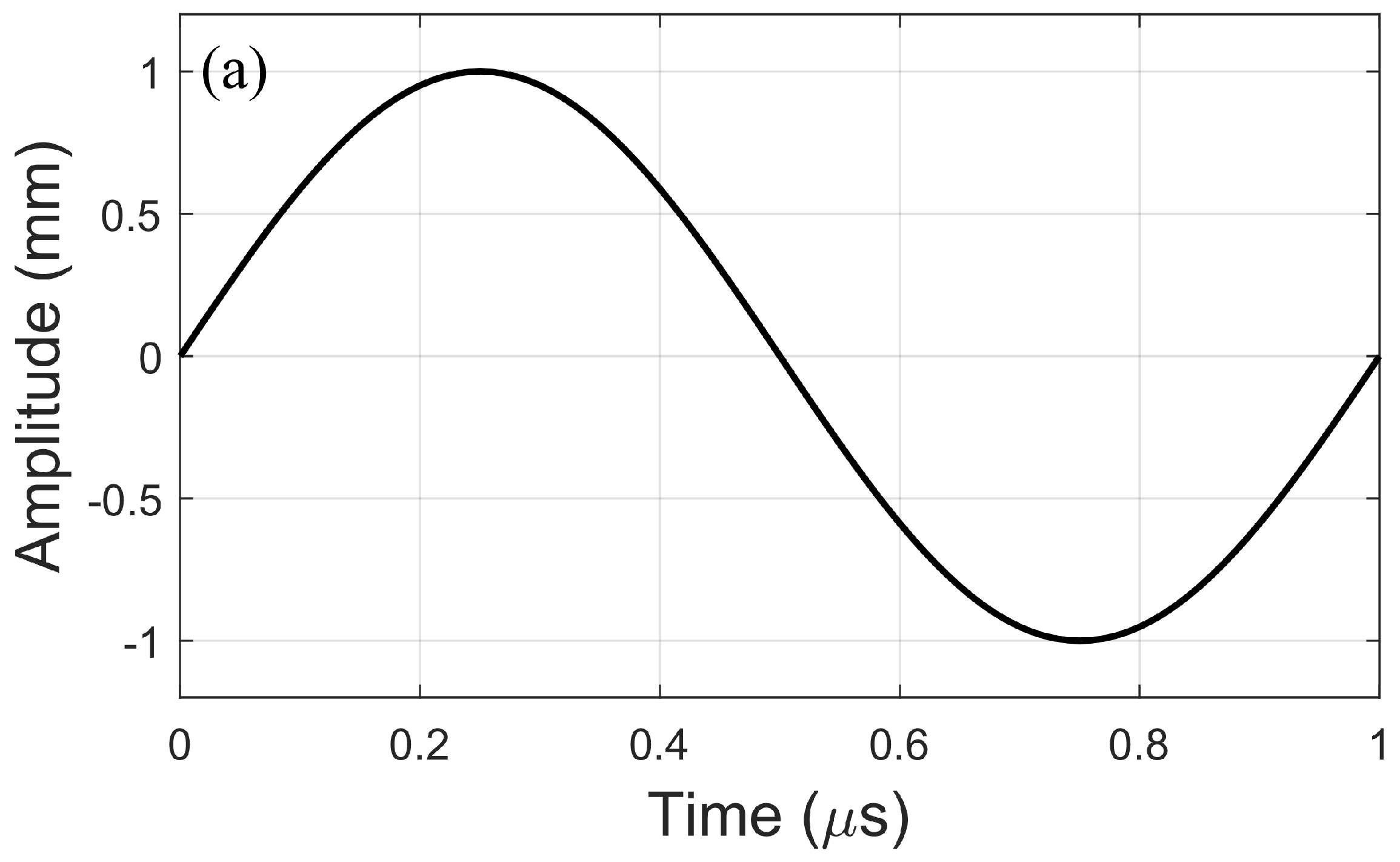
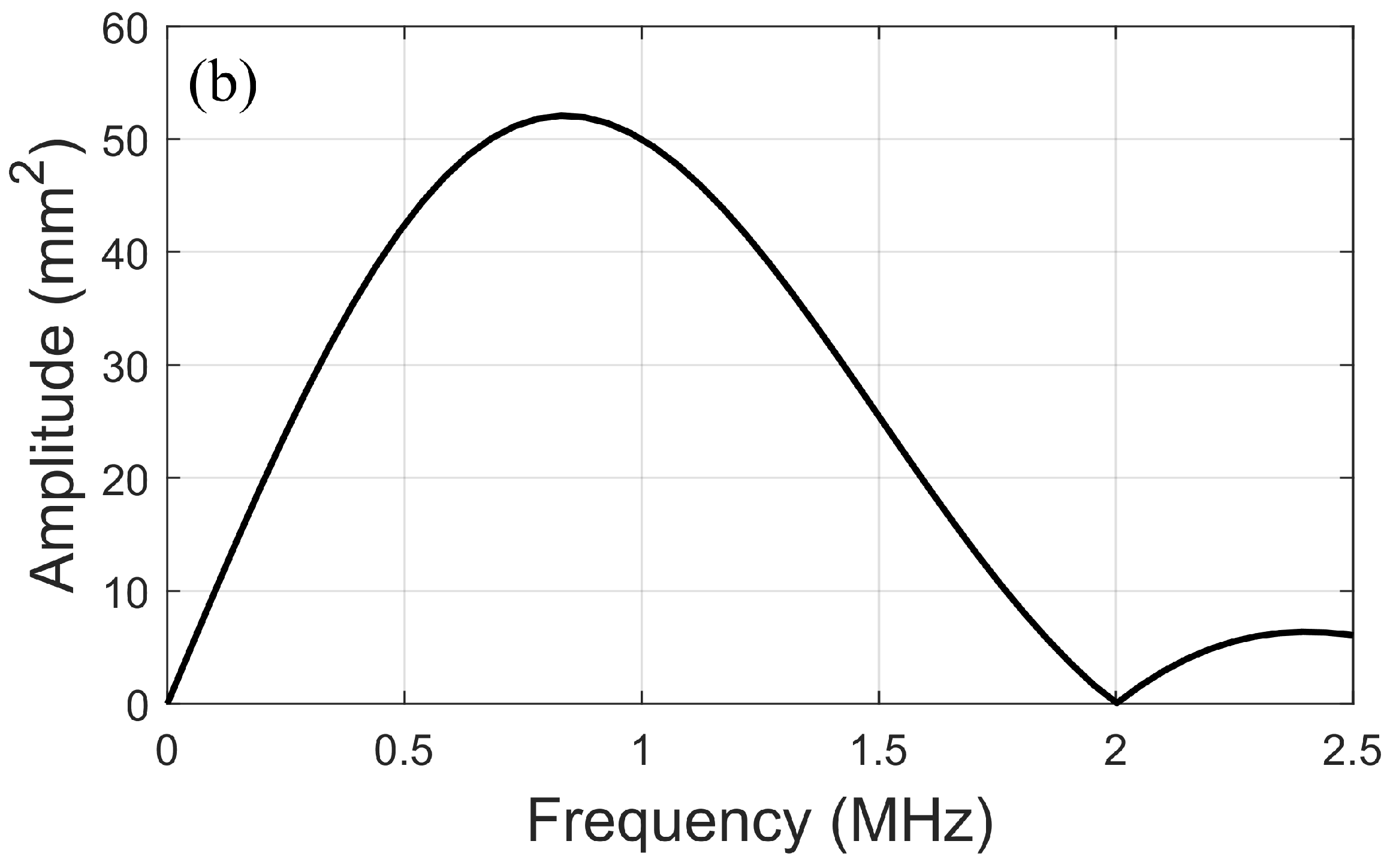
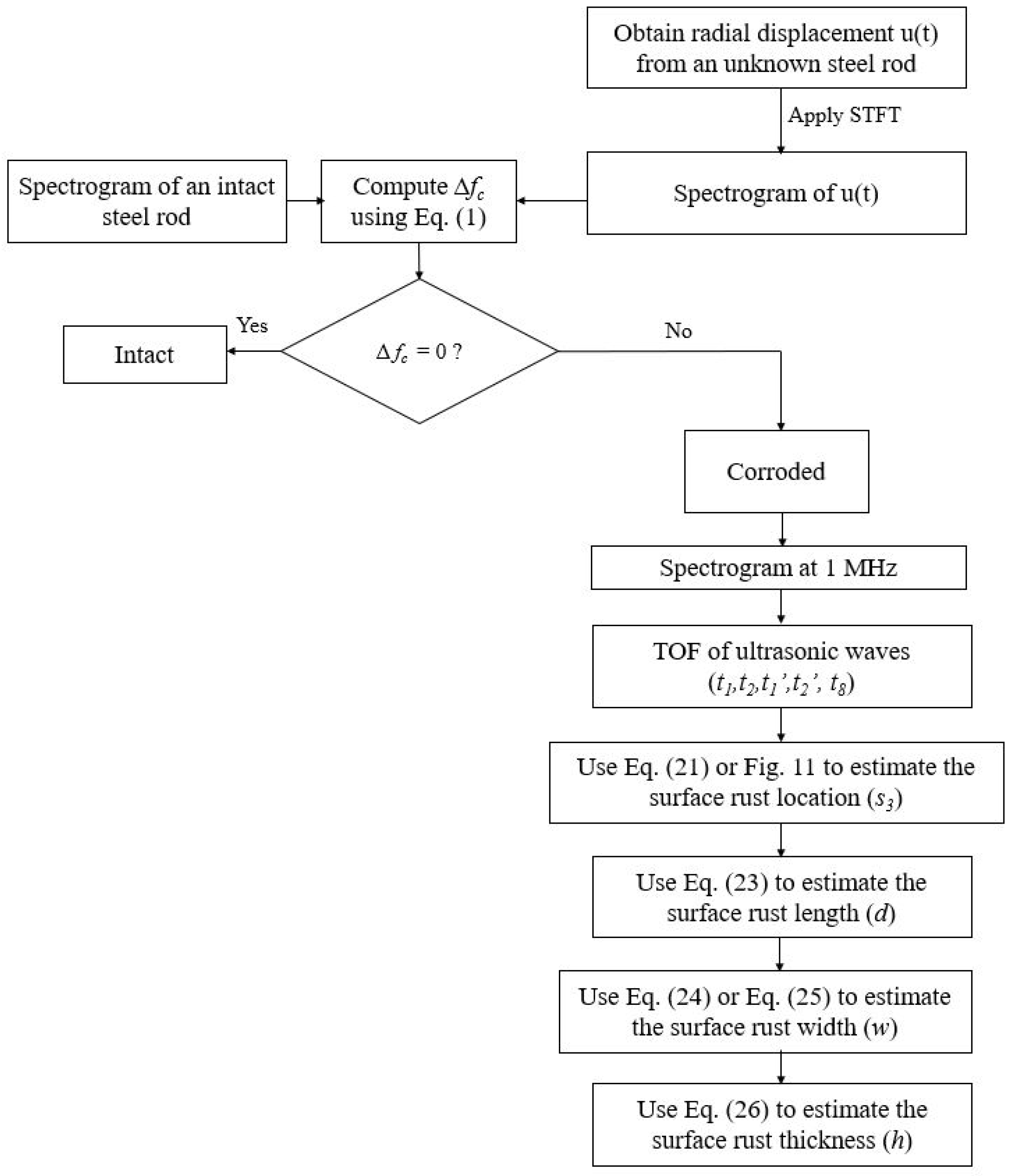
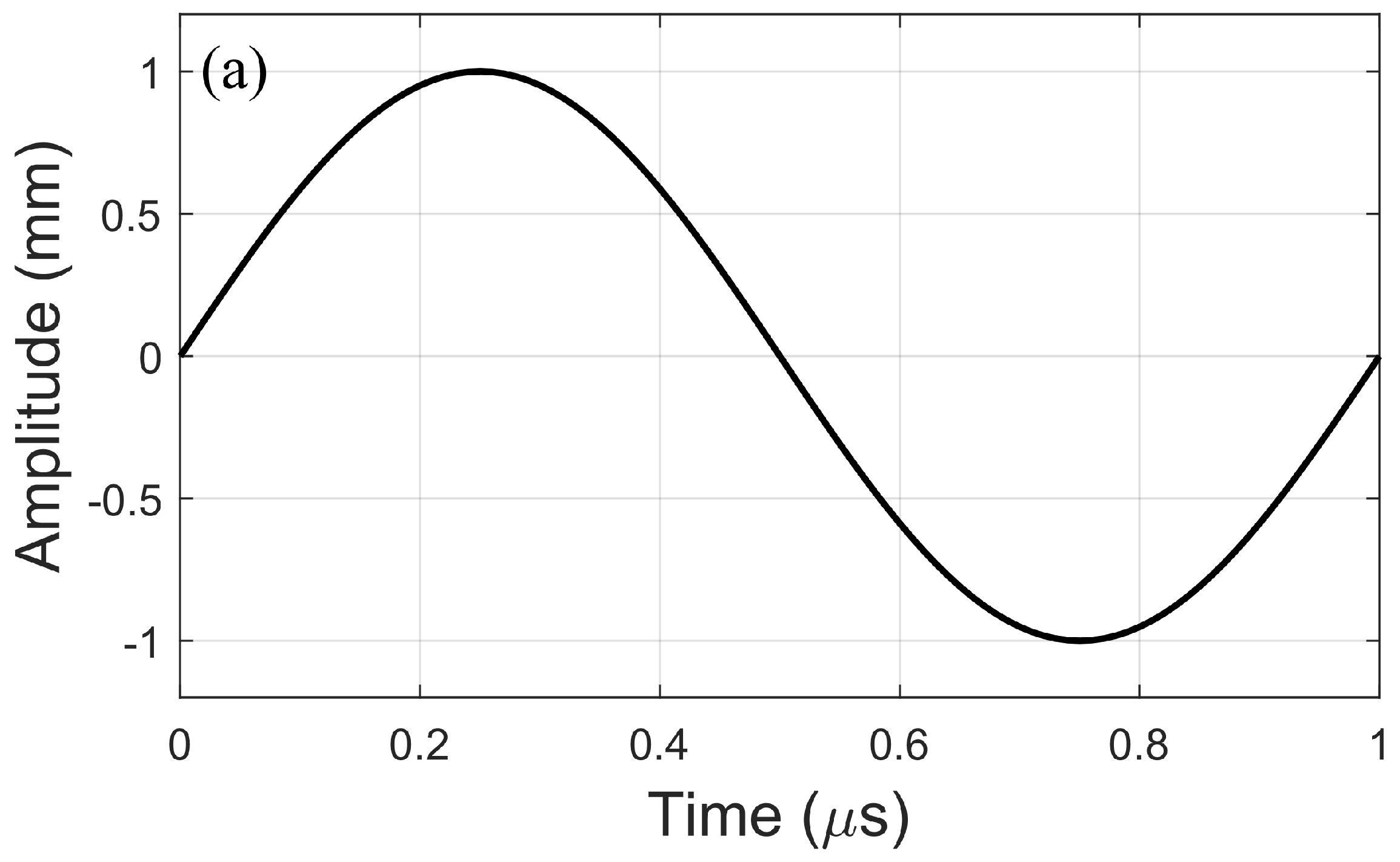
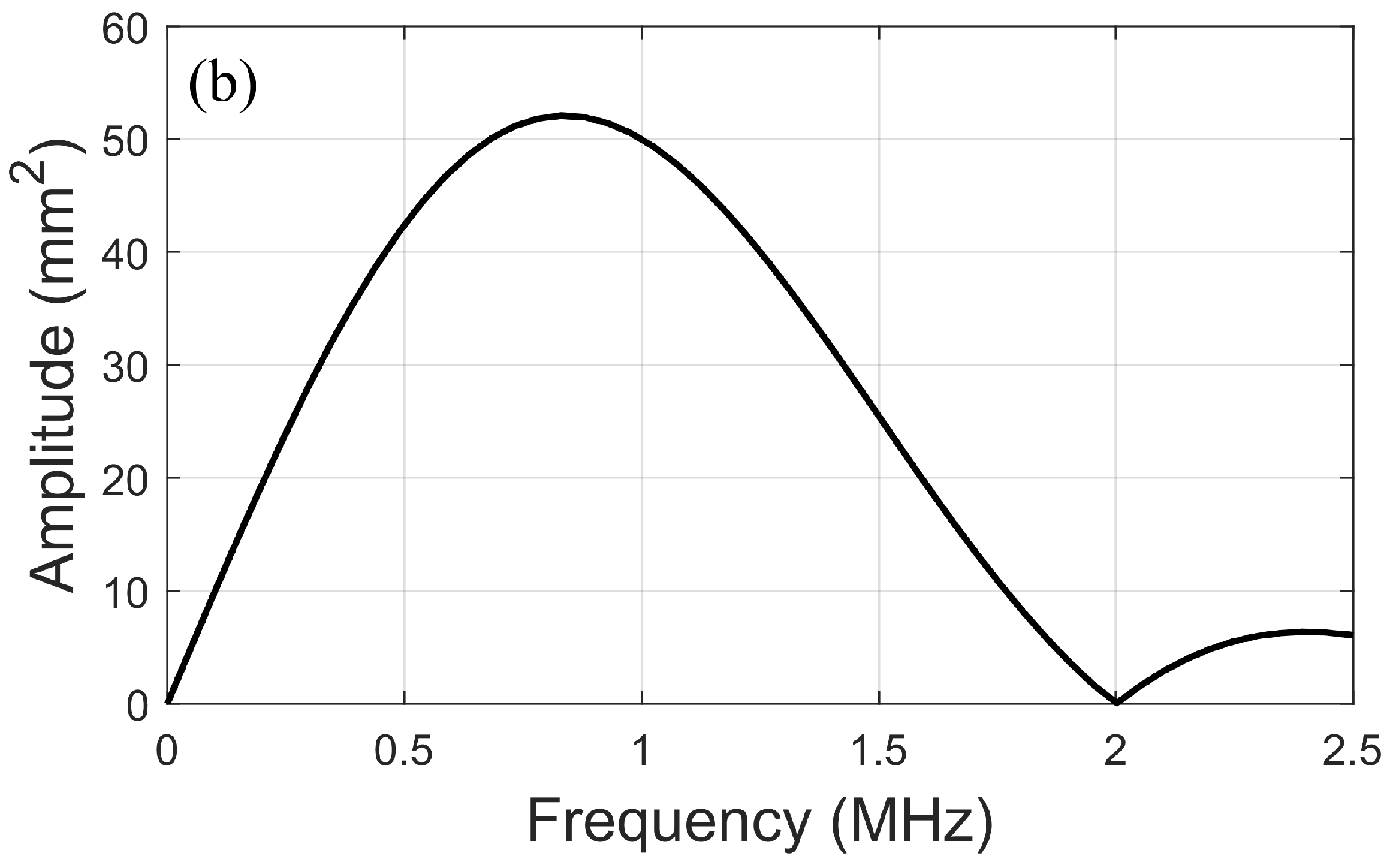
- Generate/introduce ultrasonic waves at transmitter T of model IM.
- Collect the time domain radial displacement at receiver R.
- Apply STFT to in order to convert it to its spectrogram .
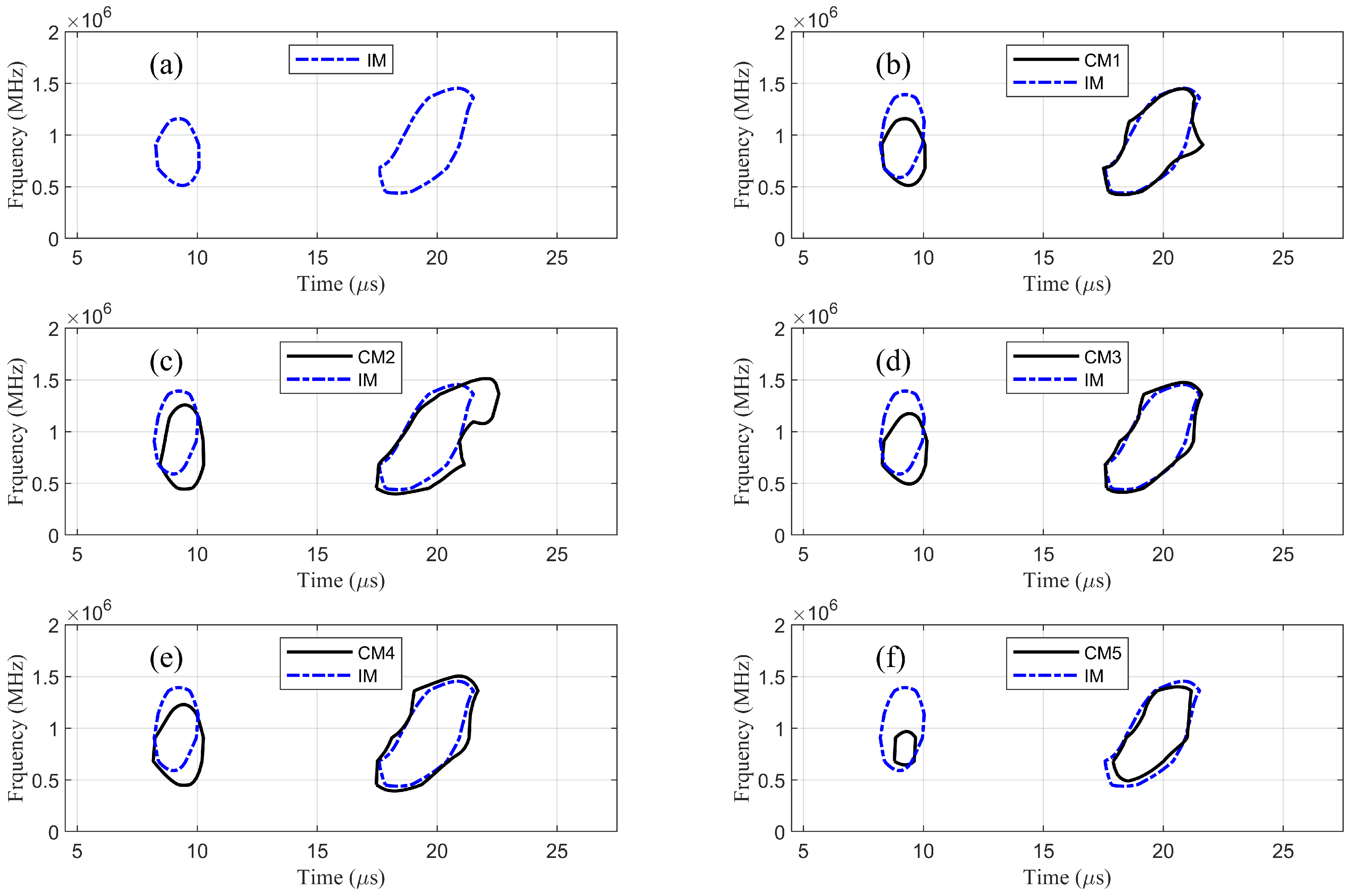
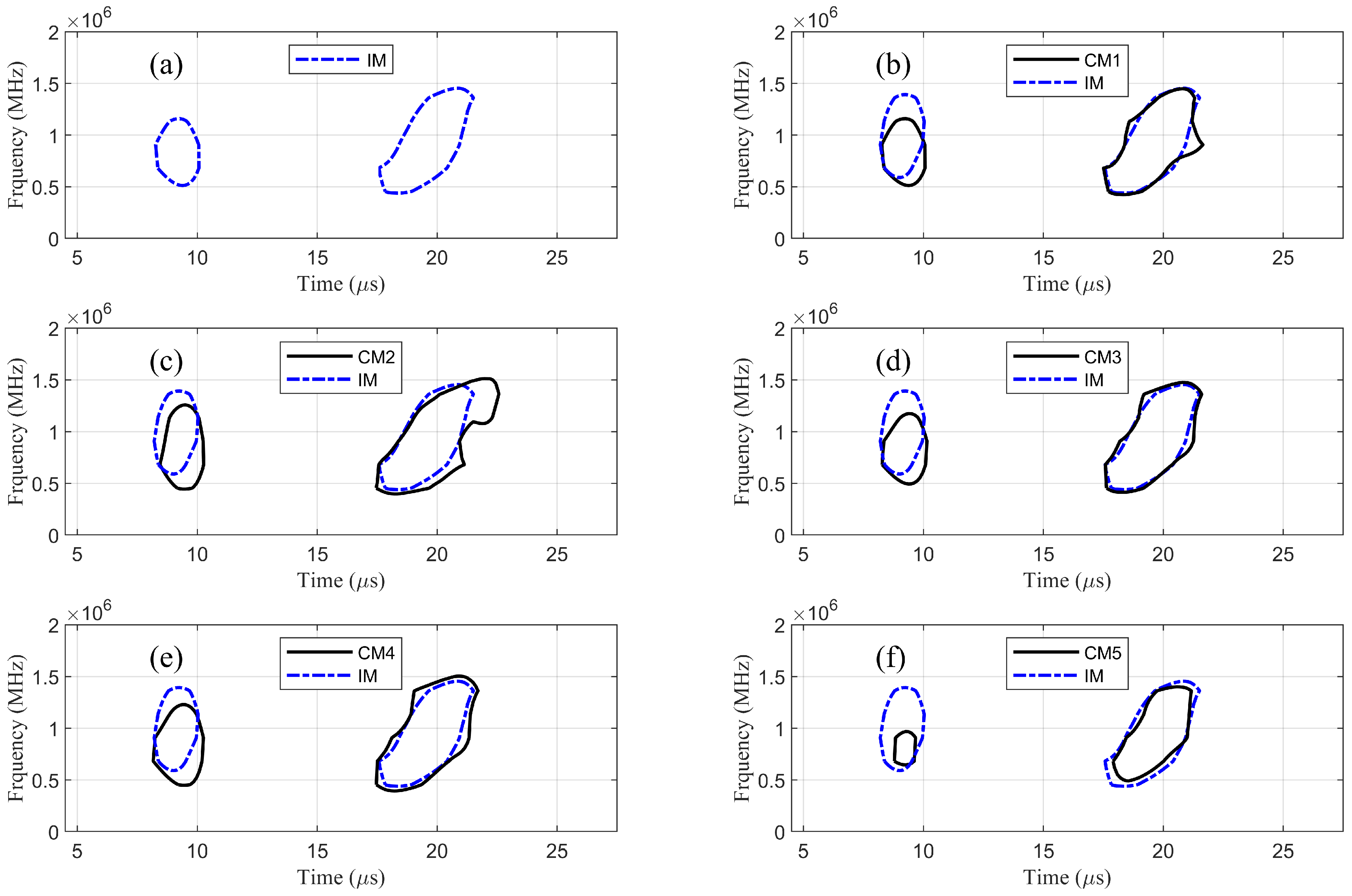
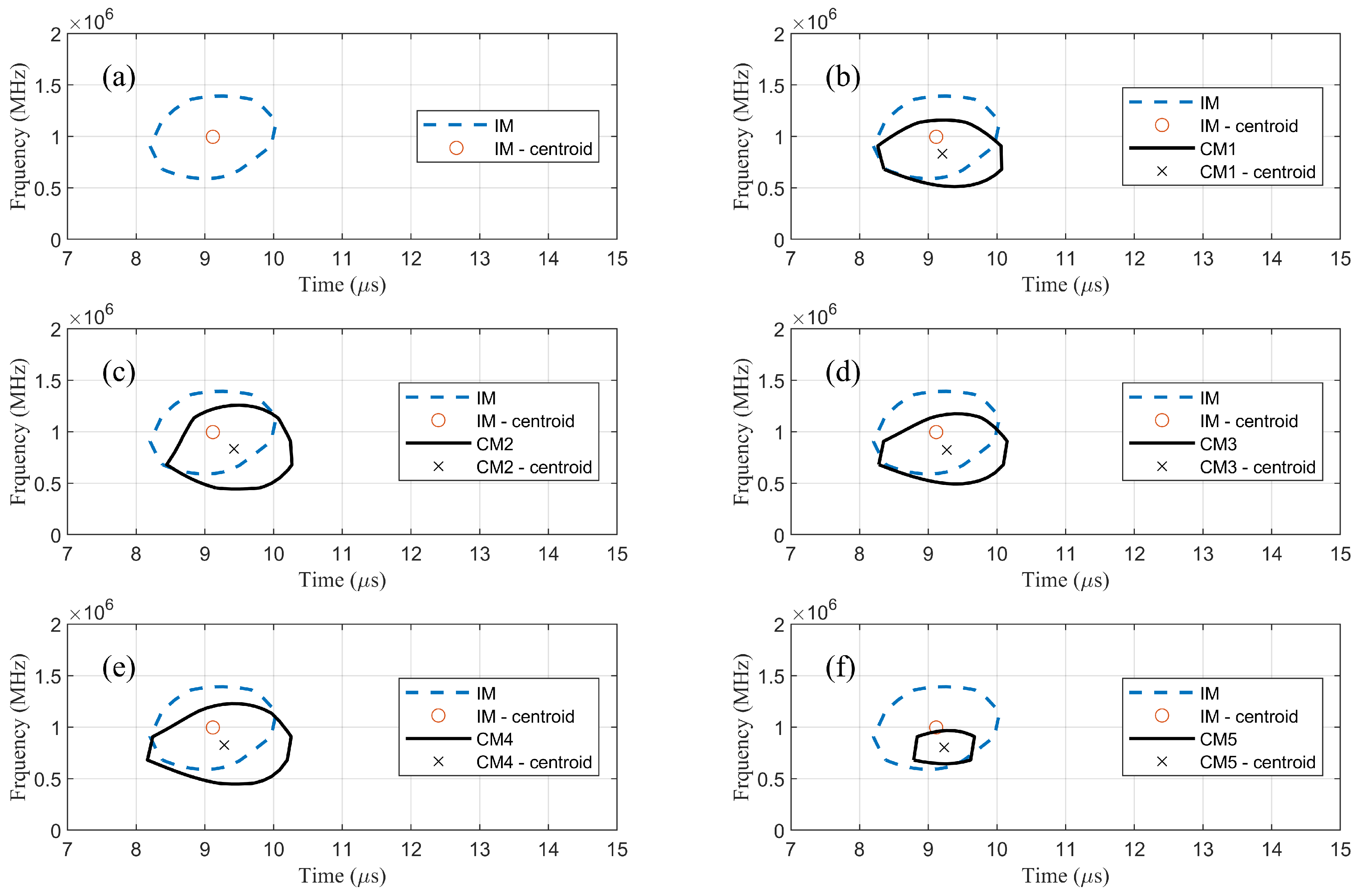
- In the spectrogram , show the half-power contour at −3 dB from the maximum amplitude of the first wave packet.
- Determine the centroid of the half-power contour for the first wave packet by finding its coordinates in the spectrogram .
- The centroid frequency of this FE simulation is thus found. For the intact model (IM), .
- Repeat the steps for an artificially corroded model. For corroded models, .
3.2.2. Damage Localization
3.2.3. Damage Quantification
4. Simulation Results
4.1. Time Domain Response
4.2. Time-Frequency Domain Response
4.3. Surface Rust Detection
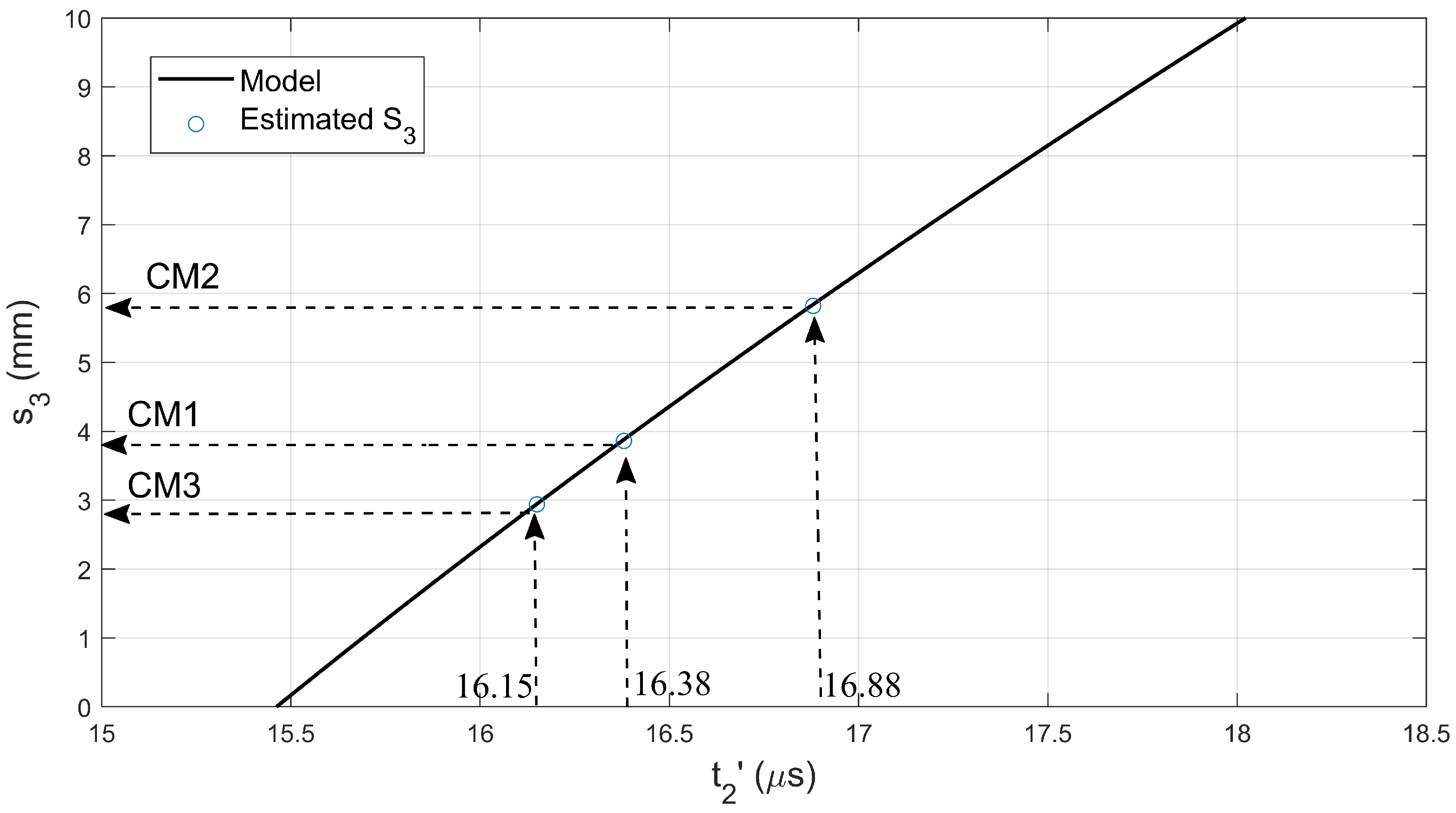
4.4. Surface Rust Localization
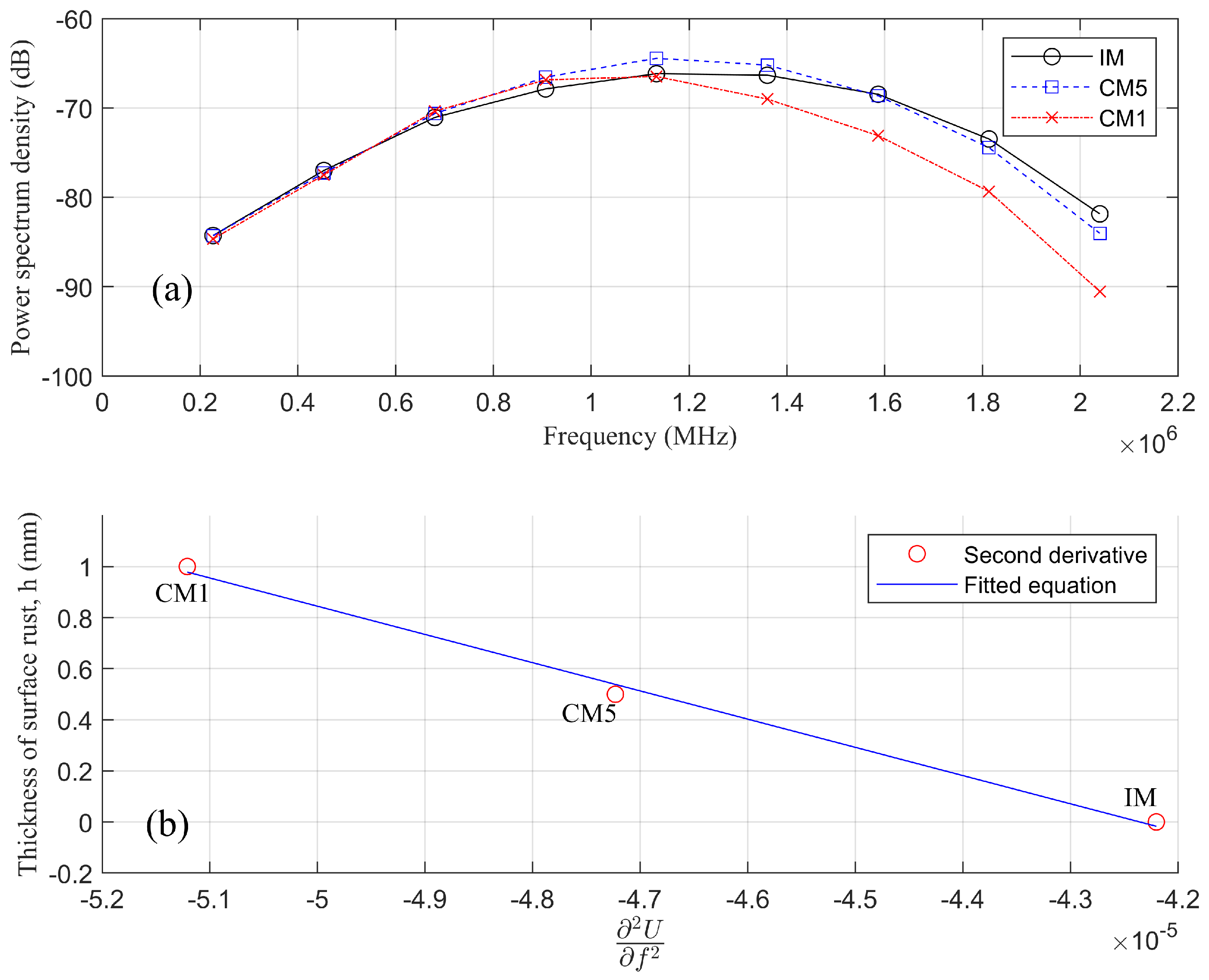
4.5. Surface Rust Quantification
5. Conclusions
- The presence of surface rust can be detected by the reduction of centroid frequency of the first wave packet in the STFT spectrogram of corroded steel rod models.
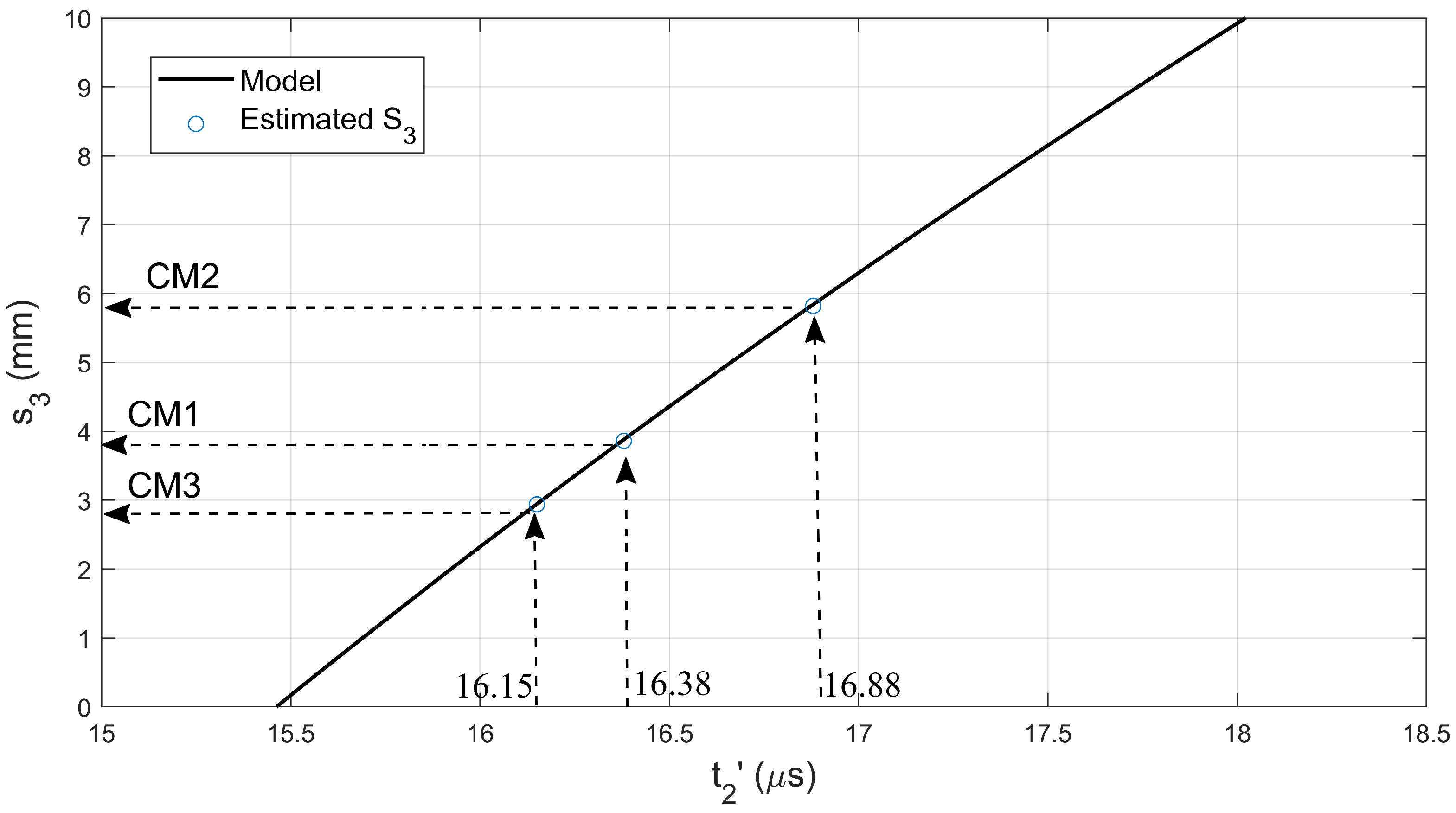
- The location of surface rust is estimated by finding the difference in arrival time (TOF) between helically propagating ultrasonic waves and scattered ultrasonic waves (due to surface rust).
- The length of surface rust can be predicted by calculating the difference in TOF between longitudinally propagating ultrasonic waves of intact and corroded steel rod models. This difference in TOF is related to the longitudinal dimension (length) of surface rust.
- The width of surface rust can be determined by calculating the difference in TOF of the first wave packet between intact and corroded steel rods in the STFT spectrogram at a fixed frequency (e.g., 1 MHz in this paper).
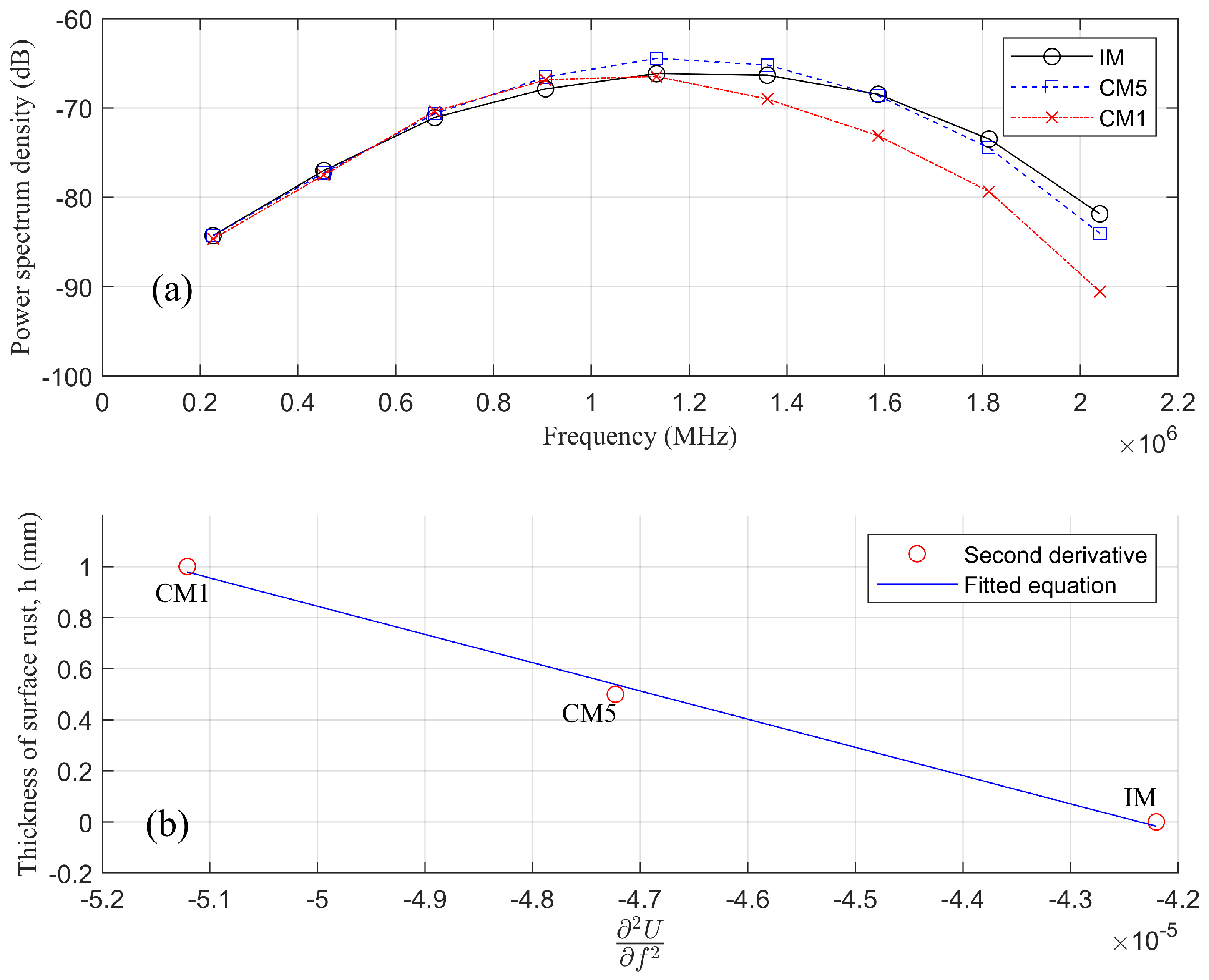
- The thickness of surface rust can be estimated by utilizing the second-order derivative of the first wave packet of corroded steel rod models.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huston, D. Structural Sensing, Health Monitoring, and Performance Evaluation; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- American Society for Testing & Materials (ASTM). Metals Test Methods and Analytical Procedures. In 1999 Annual Book of ASTM Standards; American Society for Testing & Materials (ASTM): West Conshohocken, PA, USA, 1999; Volume 3. [Google Scholar]
- Tang, Q.; Yu, T.; Jen, M. Finite element analysis for the damage detection of light pole structures. Proc. SPIE 2015, 9437. [Google Scholar] [CrossRef]
- Cheng, W. Pulsed Eddy Current Testing of Carbon Steel Pipes’ Wall-thinning Through Insulation and Cladding. J. Nondestruct. Eval. 2012, 31, 215–224. [Google Scholar] [CrossRef]
- Wallbrink, C.; Wade, S.A.; Jones, R. The effect of size on the quantitative estimation of defect depth in steel structures using lock-in thermography. J. Appl. Phys. 2007, 101, 104907. [Google Scholar] [CrossRef]
- Cook, D.; Berthelot, Y. Detection of small surface-breaking fatigue cracks in steel using scattering of Rayleigh waves. NDT E Int. 2001, 34, 483–492. [Google Scholar] [CrossRef]
- Resch, M.T.; Nelson, D.V. An ultrasonic method for measurement of size and opening behavior of small fatigue cracks. In Small-Crack Test Methods; ASTM International: West Conshohocken, PA, USA, 1992; pp. 169–196. [Google Scholar]
- Giurgiutiu, V. Tuned Lamb Wave Excitation and Detection with Piezoelectric Wafer Active Sensors for Structural Health Monitoring. J. Intell. Mater. Syst. Struct. 2005, 16, 291–305. [Google Scholar] [CrossRef] [Green Version]
- Betz, D.C.; Thursby, G.; Culshaw, B.; Staszewski, W.J. Acousto-ultrasonic sensing using fiber Bragg gratings. Smart Mater. Struct. 2003, 12, 122. [Google Scholar] [CrossRef]
- Lu, Y.; Li, J.; Ye, L.; Wang, D. Guided waves for damage detection in rebar-reinforced concrete beams. Constr. Build. Mater. 2013, 47, 370–378. [Google Scholar] [CrossRef]
- Glisic, B.; Inaudi, D. Development of method for in-service crack detection based on distributed fiber optic sensors. Struct. Health Monit. 2012, 11, 161–171. [Google Scholar] [CrossRef]
- Leung, C.K.Y.; Wan, K.T.; Inaudi, D.; Bao, X.; Habel, W.; Zhou, Z.; Ou, J.; Ghandehari, M.; Wu, H.C.; Imai, M. Review: Optical fiber sensors for civil engineering applications. Mater. Struct. 2015, 48, 871–906. [Google Scholar] [CrossRef]
- Furukawa, T.; Ishida, K.; Fukada, E. Piezoelectric properties in the composite systems of polymers and PZT ceramics. J. Appl. Phys. 1979, 50, 4904–4912. [Google Scholar] [CrossRef]
- Rodríguez, G.; Casas, J.; Villalba, S. SHM by DOFS in civil engineering: A review. Struct. Monit. Maint. 2015, 2, 357–382. [Google Scholar] [CrossRef]
- Li, H.N.; Li, D.S.; Song, G.B. Recent applications of fiber optic sensors to health monitoring in civil engineering. Eng. Struct. 2004, 26, 1647–1657. [Google Scholar] [CrossRef]
- Wu, N.; Tian, Y.; Zou, X.; Silva, V.; Chery, A.; Wang, X. High-efficiency optical ultrasound generation using one-pot synthesized polydimethylsiloxane-gold nanoparticle nanocomposite. J. Opt. Soc. Am. B 2012, 29, 2016–2020. [Google Scholar] [CrossRef]
- Zou, X.; Wu, N.; Tian, Y.; Wang, X. Broadband miniature fiber optic ultrasound generator. Opt. Express 2014, 22, 18119–18127. [Google Scholar] [CrossRef] [PubMed]
- Du, C.; Owusu Twumasi, J.; Tang, Q.; Guo, X.; Zhou, J.; Yu, T.; Wang, X. All-Optical Photoacoustic Sensors for Steel Rebar Corrosion Monitoring. Sensors 2018, 18, 1353. [Google Scholar] [CrossRef] [PubMed]
- Zou, X.; Chao, A.; Tian, Y.; Wu, N.; Yu, T.; Wang, X. A novel Fabry-Perot fiber optic temperature sensor for early age hydration heat study in Portland cement concrete. Smart Struct. Syst. 2013, 12. [Google Scholar] [CrossRef]
- Wu, N.; Zou, X.; Zhou, J.; Wang, X. Fiber optic ultrasound transmitters and their applications. Measurement 2016, 79, 164–171. [Google Scholar] [CrossRef]
- Tang, Q.; Yu, T. Finite element simulation for damage detection of surface rust in steel rebars using elastic waves. Proc. SPIE 2016, 9804. [Google Scholar] [CrossRef]
- Sansalone, M.; Carino, N.J. Detecting Delaminations in Reinforced Concrete Slabs with and without Asphalt Concrete Overlays Using the Impact-Echo Method. Natl. Bur. Stand. J. Res. 1987, 86, 369–381. [Google Scholar] [CrossRef]
- Tang, Q.; Yu, T. Finite element simulation of ultrasonic waves in corroded reinforced concrete for early-stage corrosion detection. Proc. SPIE 2017, 10169. [Google Scholar] [CrossRef]
- Zhang, S.; Shen, W.; Li, D.; Zhang, X.; Chen, B. Nondestructive Ultrasonic Testing in Rod Structure with a Novel Numerical Laplace Based Wavelet Finite Element Method. Latin Am. J. Sol. Struct. 2018, 15, 7. [Google Scholar] [CrossRef]
- Tang, Q.; Twumasi, J.O.; Hu, J.; Wang, X.; Yu, T. Finite element simulation of photoacoustic fiber optic sensors for surface corrosion detection on a steel rod. Proc. SPIE 2018, 10599, 10599-13. [Google Scholar] [CrossRef]
- Abaqus/CAE User’s Manual Version 6.12; Dassault Systémes: Vélizy-Villacoublay, France, 2011.
- Liu, G.R.; Quek, S.S. A non-reflecting boundary for analyzing wave propagation using the finite element method. Finite Elem. Anal. Des. 2003, 39, 403–417. [Google Scholar] [CrossRef]
- Liang, M.T.; Su, P.J. Detection of the corrosion damage of rebar in concrete using impact-echo method. Cem. Concr. Res. 2001, 31, 1427–1436. [Google Scholar] [CrossRef]
- Lohr, K.R.; Rose, J.L. Ultrasonic guided wave and acoustic impact methods for pipe fouling detection. J. Food Eng. 2003, 56, 315–324. [Google Scholar] [CrossRef]
- Bergmann, L. Ultrasonics and Their Scientific and Technical Applications; Wiley: New York, NY, USA, 1948. [Google Scholar]
- Viktorov, I. Rayleigh Waves and Lamb waves-Physical Theory and Application; Plenum: New York, NY, USA, 1967. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density (kg/m) | Young’s Modulus (MPa) | Poisson’s Ratio |
|---|---|---|---|
| Steel | 7850 | 210,000 | 0.3 |
| Rust | 2610 | 500 | 0.3 |
| Model | Surface Rust Location (mm) | Surface Rust Length d (mm) | Surface Rust Width w (mm) | Surface Rust Thickness h (mm) |
|---|---|---|---|---|
| CM1 | 4 | 2 | 2.2 | 1 |
| CM2 | 6 | 2 | 2.2 | 1 |
| CM3 | 4 | 4 | 2.2 | 1 |
| CM4 | 4 | 2 | 4.4 | 1 |
| CM5 | 4 | 2 | 2.2 | 0.5 |
| Model | (MHz) | (MHz) |
|---|---|---|
| IM | 1.00 | 0 |
| CM1 | 0.83 | 0.17 |
| CM2 | 0.83 | 0.17 |
| CM3 | 0.82 | 0.18 |
| CM4 | 0.82 | 0.18 |
| CM5 | 0.80 | 0.20 |
| Model | Predicted (mm) | Actual (mm) | Error (%) | |
|---|---|---|---|---|
| Location, | CM1 | 3.86 | 4 | 3.5 |
| CM2 | 5.91 | 6 | 1.5 | |
| CM3 | 2.92 | 3 | 2.6 | |
| Length, d | CM1 | 1.97 | 2 | 1.5 |
| CM2 | 3.69 | 4 | 7.75 | |
| Width, w | CM1 | 2.36 | 2.2 | 7.27 |
| CM4 | 4.2 | 4.4 | 4.54 | |
| Thickness, h | CM1 | 0.98 | 1 | 2 |
| CM5 | 0.53 | 0.5 | 6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Q.; Du, C.; Hu, J.; Wang, X.; Yu, T. Surface Rust Detection Using Ultrasonic Waves in a Cylindrical Geometry by Finite Element Simulation. Infrastructures 2018, 3, 29. https://doi.org/10.3390/infrastructures3030029
Tang Q, Du C, Hu J, Wang X, Yu T. Surface Rust Detection Using Ultrasonic Waves in a Cylindrical Geometry by Finite Element Simulation. Infrastructures. 2018; 3(3):29. https://doi.org/10.3390/infrastructures3030029
Chicago/Turabian StyleTang, Qixiang, Cong Du, Jie Hu, Xingwei Wang, and Tzuyang Yu. 2018. "Surface Rust Detection Using Ultrasonic Waves in a Cylindrical Geometry by Finite Element Simulation" Infrastructures 3, no. 3: 29. https://doi.org/10.3390/infrastructures3030029