One-Point Optimal Family of Multiple Root Solvers of Second-Order



Abstract
:1. Introduction
2. The Method
Some Particular Forms of
- (1)
- (2) (3) , (4)
- (5)
- (6) (7) (8) ,
- Method 1 (M1):
- Method 2 (M2):
- Method 3 (M3):
- Method 4 (M4):
- Method 5 (M5):
- Method 6 (M6):
- Method 7 (M7):
- Method 8 (M8):
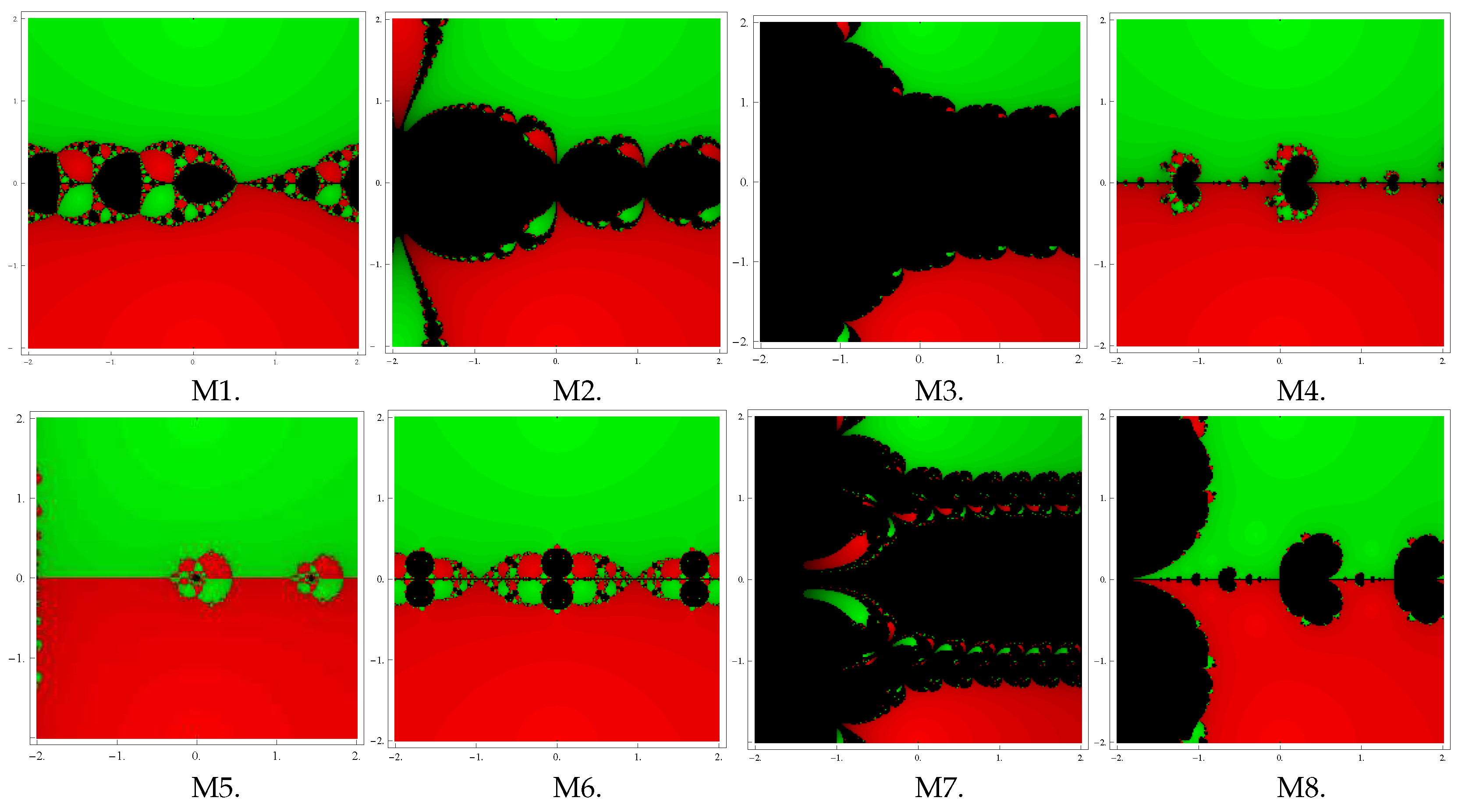
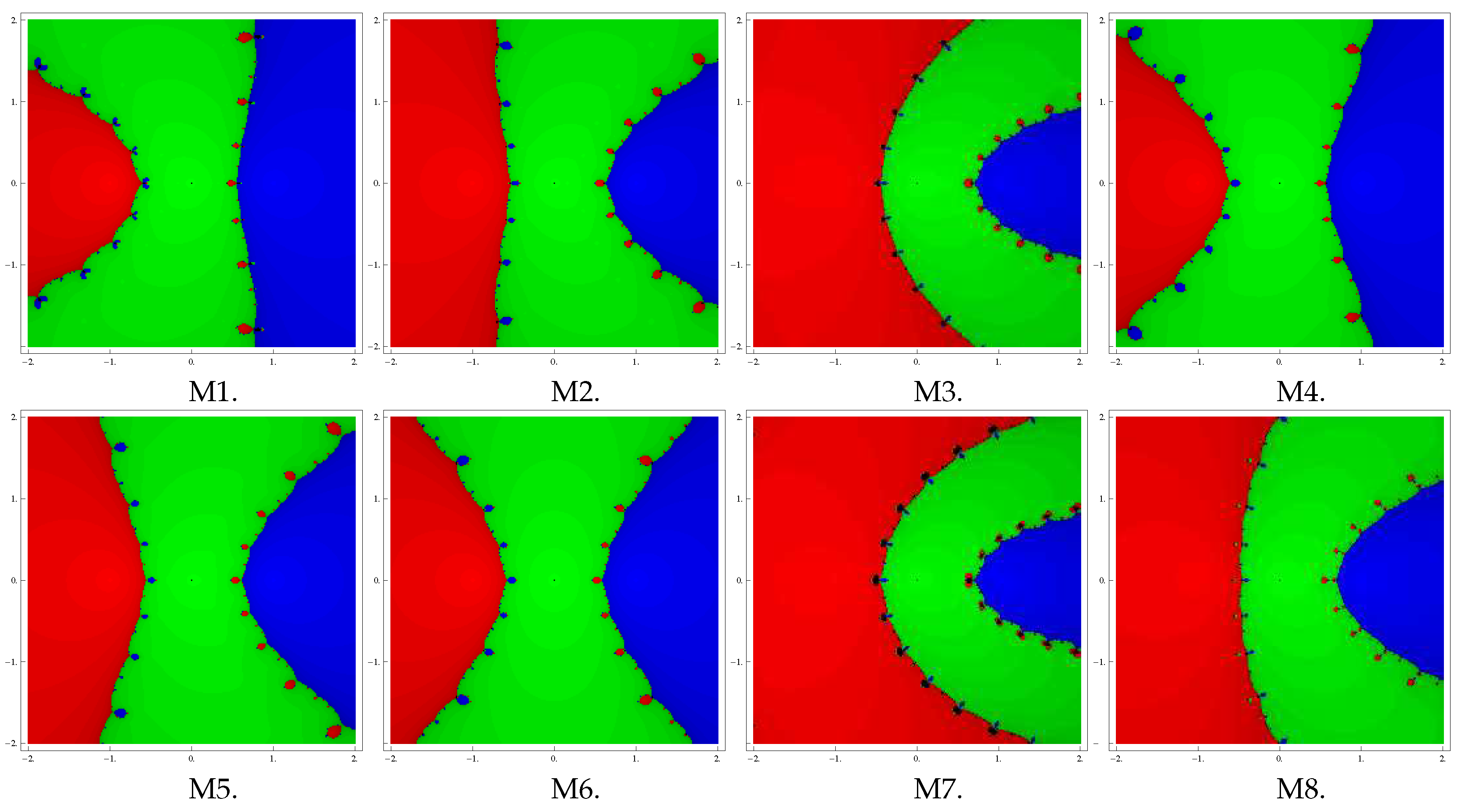
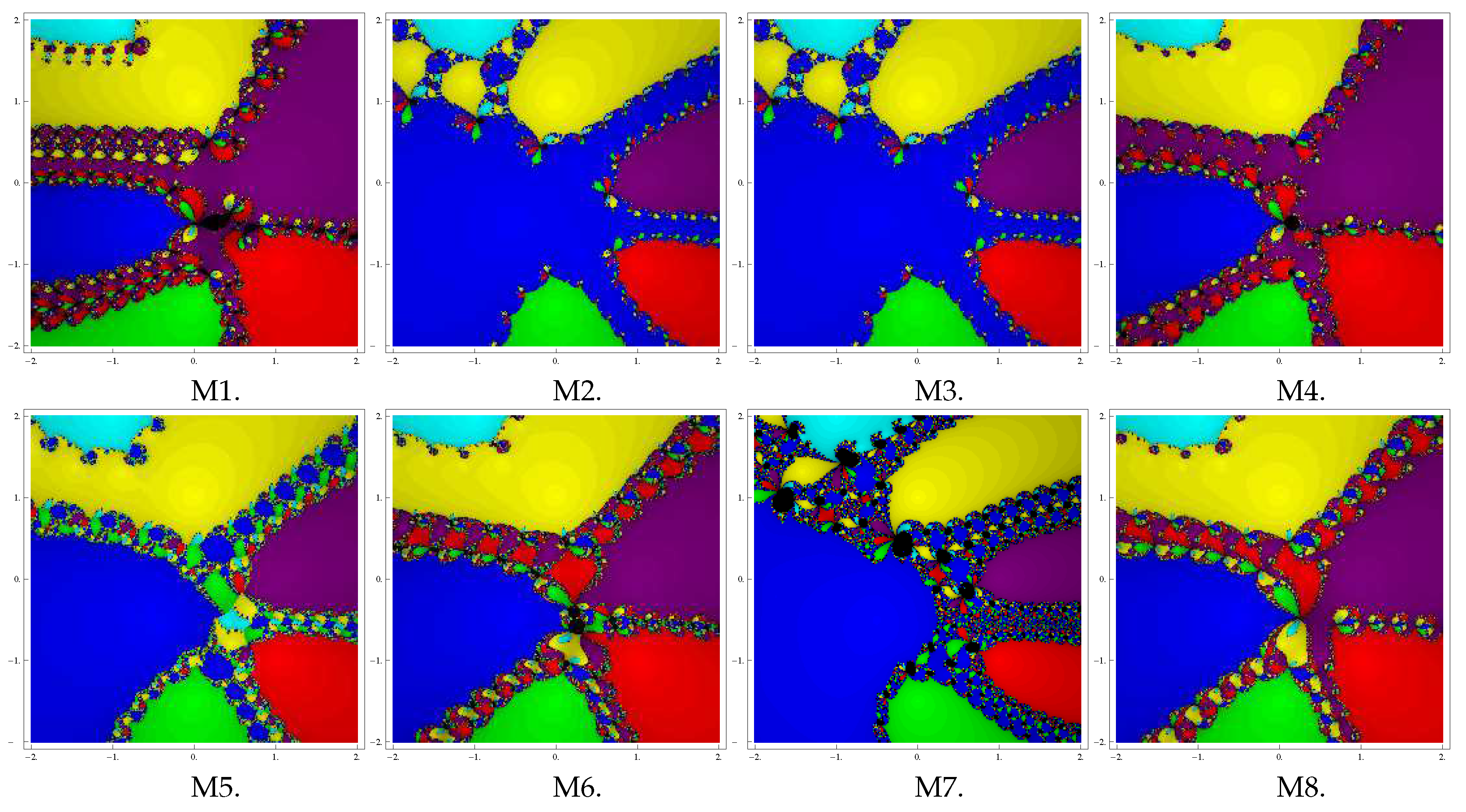
3. Complex Dynamics of Methods
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Argyros, I.K. Convergence and Applications of Newton-Type Iterations; Springer: New York, NY, USA, 2008. [Google Scholar]
- Traub, J.F. Iterative Methods for the Solution of Equations; Chelsea Publishing Company: New York, NY, USA, 1982. [Google Scholar]
- Hoffman, J.D. Numerical Methods for Engineers and Scientists; McGraw-Hill Book Company: New York, NY, USA, 1992. [Google Scholar]
- Zachary, J.L. Introduction to Scientific Programming: Computational Problem Solving Using Maple and C; Springer: New York, NY, USA, 2012. [Google Scholar]
- Cesarano, C. Generalized special functions in the description of fractional diffusive equations. Commun. Appl. Ind. Math. 2019, 10, 31–40. [Google Scholar] [CrossRef] [Green Version]
- Cesarano, C. Multi-dimensional Chebyshev polynomials: A non-conventional approach. Commun. Appl. Ind. Math. 2019, 10, 1–19. [Google Scholar] [CrossRef]
- Cesarano, C.; Ricci, P.E. Orthogonality Properties of the Pseudo-Chebyshev Functions (Variations on a Chebyshev’s Theme). Mathematics 2019, 7, 180. [Google Scholar] [CrossRef]
- Schröder, E. Über unendlich viele Algorithmen zur Auflösung der Gleichungen. Math. Ann. 1870, 2, 317–365. [Google Scholar] [CrossRef]
- Dong, C. A family of multipoint iterative functions for finding multiple roots of equations. Int. J. Comput. Math. 1987, 21, 363–367. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. A class of two-point sixth-order multiple-zero finders of modified double-Newton type and their dynamics. Appl. Math. Comput. 2015, 270, 387–400. [Google Scholar] [CrossRef] [Green Version]
- Hansen, E.; Patrick, M. A family of root finding methods. Numer. Math. 1977, 27, 257–269. [Google Scholar] [CrossRef]
- Li, S.; Liao, X.; Cheng, L. A new fourth-order iterative method for finding multiple roots of nonlinear equations. Appl. Math. Comput. 2009, 215, 1288–1292. [Google Scholar]
- Neta, B. New third order nonlinear solvers for multiple roots. Appl. Math. Comput. 2008, 202, 162–170. [Google Scholar] [CrossRef] [Green Version]
- Osada, N. An optimal multiple root-finding method of order three. J. Comput. Appl. Math. 1994, 51, 131–133. [Google Scholar] [CrossRef] [Green Version]
- Sharifi, M.; Babajee, D.K.R.; Soleymani, F. Finding the solution of nonlinear equations by a class of optimal methods. Comput. Math. Appl. 2012, 63, 764–774. [Google Scholar] [CrossRef]
- Sharma, J.R.; Sharma, R. Modified Jarratt method for computing multiple roots. Appl. Math. Comput. 2010, 217, 878–881. [Google Scholar] [CrossRef]
- Victory, H.D.; Neta, B. A higher order method for multiple zeros of nonlinear functions. Int. J. Comput. Math. 1983, 12, 329–335. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, X.; Song, Y. Constructing higher-order methods for obtaining the multiple roots of nonlinear equations. J. Comput. Appl. Math. 2011, 235, 4199–4206. [Google Scholar] [CrossRef] [Green Version]
- Ostrowski, A.M. Solution of Equations and Systems of Equations; Academic Press: New York, NY, USA, 1966. [Google Scholar]
- Kung, H.T.; Traub, J.F. Optimal order of one-point and multipoint iteration. J. Assoc. Comput. Mach. 1974, 21, 643–651. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. A sixth–order family of three–point modified Newton–like multiple–root finders and the dynamics behind their extraneous fixed points. Appl. Math. Comput. 2016, 283, 120–140. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Motsa, S.S.; Torregrosa, J.R. An eighth-order family of optimal multiple root finders and its dynamics. Numer. Algor. 2018, 77, 1249–1272. [Google Scholar] [CrossRef]
- Zafar, F.; Cordero, A.; Rana, Q.; Torregrosa, J.R. Optimal iterative methods for finding multiple roots of nonlinear equations using free parameters. J. Math. Chem. 2017. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. Constructing a family of optimal eighth-order modified Newton-type multiple-zero finders along with the dynamics behind their purely imaginary extraneous fixed points. J. Comput. Appl. Math. 2018, 333, 131–156. [Google Scholar] [CrossRef]
- Behl, R.; Zafar, F.; Alshomrani, A.S.; Junjua, M.; Yasmin, N. An optimal eighth-order scheme for multiple zeros of univariate function. Int. J. Comput. Math. 2019, 16, 1843002. [Google Scholar] [CrossRef]
- Behl, R.; Alshomrani, A.S.; Motsa, S.S. An optimal scheme for multiple roots of nonlinear equations with eighth-order convergence. J. Math. Chem. 2018. [Google Scholar] [CrossRef]
- Zafar, F.; Cordero, A.; Torregrosa, J.R. An efficient family of optimal eighth-order multiple root finder. Mathematics 2018, 6, 310. [Google Scholar] [CrossRef]
- Chicharro, F.I.; Cordero, A.; Garrido, N.; Torregrosa, J.R. Genertaing root-finder iterative methods of second-order: Convergence and stability. Axioms 2019, 8, 55. [Google Scholar] [CrossRef]
- Vrscay, E.R.; Gilbert, W.J. Extraneous fixed points, basin boundaries and chaotic dynamics for Schröder and König rational iteration functions. Numer. Math. 1988, 52, 1–16. [Google Scholar] [CrossRef]
- Scott, M.; Neta, B.; Chun, C. Basin attractors for various methods. Appl. Math. Comput. 2011, 218, 2584–2599. [Google Scholar] [CrossRef]
- Varona, J.L. Graphic and numerical comparison between iterative methods. Math. Intell. 2002, 24, 37–46. [Google Scholar] [CrossRef]
- Weerakoon, S.; Fernando, T.G.I. A variant of Newton’s method with accelerated third-order convergence. Appl. Math. Lett. 2000, 13, 87–93. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | n | |||||
|---|---|---|---|---|---|---|
| MNM | 7 | 2.000 | ||||
| M1 | 7 | 2.000 | ||||
| M2 | 7 | 2.000 | ||||
| M3 | 6 | 2.000 | ||||
| M4 | 7 | 2.000 | ||||
| M5 | 6 | 2.000 | ||||
| M6 | 7 | 2.000 | ||||
| M7 | 6 | 2.000 | ||||
| M8 | 7 | 2.000 |
| Methods | n | |||||
|---|---|---|---|---|---|---|
| MNM | 7 | 2.000 | ||||
| M1 | 7 | 2.000 | ||||
| M2 | 7 | 2.000 | ||||
| M3 | 7 | 2.000 | ||||
| M4 | 6 | 2.000 | ||||
| M5 | 7 | 2.000 | ||||
| M6 | 7 | 2.000 | ||||
| M7 | 7 | 2.000 | ||||
| M8 | 6 | 2.000 |
| Methods | n | |||||
|---|---|---|---|---|---|---|
| MNM | 10 | 2.000 | ||||
| M1 | 10 | 2.000 | ||||
| M2 | 10 | 2.000 | ||||
| M3 | 10 | 2.000 | ||||
| M4 | 10 | 2.000 | ||||
| M5 | 10 | 2.000 | ||||
| M6 | 10 | 2.000 | ||||
| M7 | 10 | 2.000 | ||||
| M8 | 9 | 2.000 |
| Methods | n | |||||
|---|---|---|---|---|---|---|
| MNM | 7 | 2.000 | ||||
| M1 | 7 | 2.000 | ||||
| M2 | 7 | 2.000 | ||||
| M3 | 7 | 2.000 | ||||
| M4 | 7 | 2.000 | ||||
| M5 | 7 | 2.000 | ||||
| M6 | 7 | 2.000 | ||||
| M7 | 7 | 2.000 | ||||
| M8 | 7 | 2.000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, D.; Sharma, J.R.; Cesarano, C. One-Point Optimal Family of Multiple Root Solvers of Second-Order. Mathematics 2019, 7, 655. https://doi.org/10.3390/math7070655
Kumar D, Sharma JR, Cesarano C. One-Point Optimal Family of Multiple Root Solvers of Second-Order. Mathematics. 2019; 7(7):655. https://doi.org/10.3390/math7070655
Chicago/Turabian StyleKumar, Deepak, Janak Raj Sharma, and Clemente Cesarano. 2019. "One-Point Optimal Family of Multiple Root Solvers of Second-Order" Mathematics 7, no. 7: 655. https://doi.org/10.3390/math7070655
APA StyleKumar, D., Sharma, J. R., & Cesarano, C. (2019). One-Point Optimal Family of Multiple Root Solvers of Second-Order. Mathematics, 7(7), 655. https://doi.org/10.3390/math7070655