q-Rung Orthopair Fuzzy Competition Graphs with Application in the Soil Ecosystem


1
Department of Mathematics, University of the Punjab, New Campus, Lahore 54590, Pakistan
2
Department of Mathematics, COMSATS University Islamabad, Lahore Campus 54590, Pakistan
*
Author to whom correspondence should be addressed.
Mathematics 2019, 7(1), 91; https://doi.org/10.3390/math7010091
Submission received: 29 November 2018
/
Revised: 9 January 2019
/
Accepted: 12 January 2019
/
Published: 16 January 2019
Abstract
:The q-rung orthopair fuzzy set is a powerful tool for depicting fuzziness and uncertainty, as compared to the Pythagorean fuzzy model. The aim of this paper is to present q-rung orthopair fuzzy competition graphs (q-ROFCGs) and their generalizations, including q-rung orthopair fuzzy k-competition graphs, p-competition q-rung orthopair fuzzy graphs and m-step q-rung orthopair fuzzy competition graphs with several important properties. The study proposes the novel concepts of q-rung orthopair fuzzy cliques and triangulated q-rung orthopair fuzzy graphs with real-life characterizations. In particular, the present work evolves the notion of competition number and m-step competition number of q-rung picture fuzzy graphs with algorithms and explores their bounds in connection with the size of the smallest q-rung orthopair fuzzy edge clique cover. In addition, an application is illustrated in the soil ecosystem with an algorithm to highlight the contributions of this research article in practical applications.
1. Introduction
Configurations of node connections take place in a wide diversity of applications. They may depict physical networks, such as electric circuits, roadways, and organic molecules. They are also employed in depicting fewer interactions as might arise in ecosystems, databases, sociological relationships, or in the flow of control in a computer program. Any mathematical object concerning points and connections between them is called a graph. The genesis of graph theory can be traced back to Euler’s work on the Königsberg bridges problem in Aristotle verbally outlined the first directed graph in a manner to organize logical arguments. In Cohen [1] formally introduced competition graphs in association with a problem in ecology. The competition graph is an undirected graph of a digraph , where the digraph corresponds to the food web of a group of predator and prey species in an ecosystem. In this regard, the digraph is usually acyclic. Cohen defined the competition graph of a digraph as an undirected graph with the same vertex set V and has an edge between two distinct vertices if there exist a vertex and arcs in Thus, the analogy of Cohen is based on the fact that if two species have common prey they will strive for the prey. After Cohen’s prologue on the competition graph, various variations of it are detected in the literature see [2,3,4,5,6,7]. In Cho et al. [8] introduced another generalization, named the m-step competition graph of a directed graph. Besides, in ecosystems, competition graphs have many applications in various fields, such as modeling market structures in the field of economics, communications over a noisy channel, energy systems, social interactions, channel assignments etc. After the primary motivation of food web models of ecosystems, a lot of work have been done on competition graphs, where it is assumed that vertices and edges are precisely defined. However, this assumption is not sufficient to describe competition in many real-world scenarios, such as in an ecosystem, where species may be weak, strong, vegetarian, non-vegetarian etc. and prey may be harmful, digestive, tasty etc. Due to the vagueness in description of species and prey, and their relationships, it is natural to design a fuzzy competition graph model.
Zadeh proposed the notion of fuzzy sets in his monumental paper [9] in 1965, to model uncertainty or vague ideas by nominating a degree of membership to each entity, ranging between 0 and A fuzzy graph, originated by Kaufmann [10] in 1973 from the Zadeh’s fuzzy relations [11], can well express the uncertainty of plenty of networks. Rosenfeld [12] developed several theocratical concepts of fuzzy graphs in In intuitionistic fuzzy sets (IFSs), primarily proposed by Atanassov [13], offered many significant advantages in representing human knowledge by denoting fuzzy membership not only with a single value, but pairs of mutually orthogonal fuzzy sets, called orthopairs, which allow the incorporation of uncertainty. Since IFSs confine the selection of orthopairs to coming only from a triangular region, as shown in Figure 1, Pythagorean fuzzy sets (PFSs), proposed by Yager [14], as a new extension of IFSs, have emerged as an efficient tool for conducting uncertainty more properly in human analysis, as one can see in [14,15,16,17]. Although both IFSs and PFSs make use of orthopairs to narrate assessment objects, they still have visible differences. The membership function and non-membership function of IFSs are required to satisfy the constraint condition However, these two functions in PFSs are needed to satisfy the condition which shows that PFSs have expanded space to assign orthopairs, as compared to IFSs, displayed in Figure 1. Certain notions of Pythagorean fuzzy graphs have been discussed in [18,19,20,21].
A q-rung orthopair fuzzy set (q-ROFS), originally proposed by Yager [22] in is a new generalization of orthopair fuzzy sets (e.g., IFSs, PFSs) which further relax the constraint of orthopair membership grades with [23]. As q increases, it is easy to see that the representation space of allowable orthopair membership grade increases. Figure 1 displays spaces of the most widely acceptable orthopairs for different q rungs. Ali [24] calculated the area of spaces with admissible orthopairs up to 10-rungs. Consider an example in the field of economics: in a market structure, a huge number of firms compete against each other with differentiated products with respect to branding or quality, which in nature are vague words. Since IFSs have the capability to explore both aspects of ambiguous words, for example, it assigns an orthopair membership grade to ‘quality’ i.e., support for quality and support for not-quality of an object with the condition that their sum is bounded by This constraint clearly limits the selection of orthopairs. Moreover, in graph theocratical concepts, it is straightforward to observe the adaptations of predators towards their prey and fight of prey against predators. The IFS can translate the uncertainty associated with both phases of species at the same time with the restriction that their sum is less than or equal to one. To relax this condition and enhance one’s capability to express this knowledge more precisely, this paper defines q-ROFCGs to deal with competitions in many fields.
Fuzzy competition graphs, firstly defined by Samanta and Pal [25] with its generalizations [25,26,27], express the partialness of species and prey regarding their extent of competition. A lot of work has been done on fuzzy competition graphs. Recently, Sahoo and Pal [28] introduced the conception of intuitionistic fuzzy competition graphs to extend the capability to model human knowledge. Nasir et al. [29] discussed operations on intuitionistic fuzzy competition graphs. Moreover, Al-Shehrie and Akram [30] discussed bipolar fuzzy competition graphs. Sarwar and Akram further studied this concept in [31,32] by defining some operations. Akram and Nasir [33] discussed interval-valued neutrosophic competition graphs. Akram and Sarwar [34] analyzed m-polar fuzzy competition graphs. Recently, Sarwar et al. [35] introduced fuzzy competition hyper graphs. Furthermore, Suna et al. [36] defined fuzzy cliques. Furthermore, Suna et al. [36] defined fuzzy cliques. In the present study, an attempt is made to describe the novel concept of q-rung orthopair fuzzy competition graphs. We extend intuitionistic fuzzy k-competition graphs, p-competition intuitionistic fuzzy graphs and m-step intuitionistic fuzzy competition graphs and obtain analogous results under q-rung orthopair fuzzy environment. In particular, we propose a novel characterization towards q-rung orthopair fuzzy cliques and triangulated q-rung orthopair fuzzy graphs with several related results. On the other hand, in the literature of competition graphs, much attention has been focused on finding the competition number of a graph. Roberts [37] showed that after adding sufficient numbers of isolated vertices to an acyclic digraph, it leads to a competition graph. He defined competition number as the smallest such possible number. This parameter has been extensively studied by many researchers; see [38,39,40]. Previous work has underlined characterization, not only of the competition graphs but also m-step competition graphs. Cho et al. [8] introduced m-step competition number in this regard, which is analogous to the notion of competition number by Roberts [37]. Certain bounds on competition number was discussed in [38,40,41]. The contribution or this research article is not only restricted to q-ROFCGs but it introduces the concept of competition number and m-step competition number of q-rung orthopair fuzzy graphs along with two algorithms. The results show their connection with the size of smallest q-rung orthopair fuzzy edge clique cover as bounds. Finally, this work suggests a novel approach towards the soil ecosystem by exploring the strength of competition of bacteria with an algorithm.
2. Preliminaries
This section presents a brief review of competition graphs, fuzzy competition graphs and q-rung orthopair fuzzy sets. Meanwhile, we define cardinality, support, and height of q-rung orthopair fuzzy sets which will be used for further developments.
A graph consists of two sets V and The elements of V and E are called vertices (or nodes) and edges respectively, where each edge has a set of one or two vertices associated with it. A digraph (or directed graph) is a graph each of whose edges is directed, usually denoted by where is the set of arcs for A walk in a graph G is an alternating sequence of vertices and edges, such that for the vertices and are the end points of edge If moreover, the edge is directed from to then W is directed walk. A trail in a graph is a walk such that no edge occurs more than once. A path in a graph is a trail such that no internal vertex is repeated. A cycle is a closed path of length at least one. The out-neighborhood and in-neighborhood [42] of a vertex u in can be defined by and respectively.
Definition 1 ([1]).
The competition graph of a digraph is an undirected graph which has the same vertex set V and has an edge between two distinct vertices if there exist a vertex and arcs in
A clique in a graph G is a maximal set of mutually adjacent vertices of The clique number, denoted by is the number of vertices in a largest clique of An edge clique cover of a graph G is any family of complete subgraphs of G such that every edge of G is in at least one of
Competition number defined by Roberts in [37] states that, if G is any graph, we can obtain a competition graph by adding many isolated vertices. Add one isolated vertex to corresponding to every edge in Construct a food web F with vertex set with an arc from end points u and v of edge to vertex Then F is a food web for the graph Thus, the smallest r such that is a competition graph, is called competition number
Sometimes vertices and edges of graphs are not precisely defined. A fuzzy graph can well express such uncertainty. A fuzzy graph [10] on a non-empty set X is a pair where and such that for all where and represent the membership values of the vertex u and edge in respectively. A fuzzy digraph [43] on a non-empty set X is a pair where and such that for all where and represent the membership values of the vertex u and edge in respectively. When we deal with a problem in ecology, species and prey may be fuzzy in nature and the relationship between them can be designed by fuzzy competition graphs. A lot of work has been done on fuzzy competition graphs and its variations which are designed as motivated by the fuzzy food web. A fuzzy out-neighborhood [25] of a vertex v of a directed fuzzy graph is a fuzzy set where and defined by A fuzzy in-neighborhood [25] of a vertex v of a directed fuzzy graph is a fuzzy set , where and defined by
Definition 2 ([25]).
Let be a directed fuzzy graph. The fuzzy competition graph of a fuzzy digraph is an undirected fuzzy graph which has same fuzzy vertex set as in and has a fuzzy edge between two vertices in if and only if in and the membership grade of edge in is
Definition 3 ([25]).
Let k be a non-negative real number and be a directed fuzzy graph. The fuzzy k-competition graph of a fuzzy digraph is an undirected fuzzy graph which has same fuzzy vertex set as in and has a fuzzy edge between two vertices in if and only if The membership grade of edge in is
where
Definition 4 ([25]).
Let p be a positive integer and be a directed fuzzy graph. The p-competition fuzzy graph of a fuzzy digraph is an undirected fuzzy graph which has same fuzzy vertex set as in and has a fuzzy edge between two vertices in if and only if The membership grade of edge in is
where
Before introducing m-step fuzzy competition graph, we define an m-step fuzzy digraph. An m-step fuzzy digraph of a fuzzy digraph has same fuzzy vertex set and has a fuzzy edge between if there exist a fuzzy directed path in of length m such that where m is positive integer. An m-step fuzzy out-neighborhood [27] of a vertex v of a directed fuzzy graph an m-step fuzzy set , where and defined by An m-step fuzzy in-neighborhood [27] of a vertex v of a directed fuzzy graph is an m-step fuzzy set where and defined by
Definition 5 ([27]).
Let be a directed fuzzy graph. An m-step fuzzy competition graph of a fuzzy digraph is an undirected fuzzy graph which has same fuzzy vertex set as in and has a fuzzy edge between two vertices in if and only if in and the membership grade of edge in is
Definition 6 ([22]).
Let X be a universe of discourse, a q-rung orthopair fuzzy set(q-ROFS) on X is given by
characterized by a membership function and a non-membership function such that Moreover, is called a q-rung orthopair fuzzy index or indeterminacy degree of u to the set .
Definition 7.
Let be a q-rung orthopair fuzzy set. Then the cardinality of is denoted by Card(), is defined as
such that
Definition 8.
Let be a q-rung orthopair fuzzy set. Then the support of is denoted by Supp(), is defined as
such that
Definition 9.
Let be a q-rung orthopair fuzzy set. Then the height of is denoted by h(), is defined as
such that
The geometrical interpretation is shown in Figure 2.
3. q-Rung Orthopair Fuzzy Graphs
The q-rung orthopair fuzzy sets (q-ROFSs) enhance the capability of decision-makers in assigning orthopairs by their own choice. We now define q-rung orthopair fuzzy graphs which can be extensively used in many practical problems.
Definition 10.
Let X be a non-empty set. A mapping is called a q-rung orthopair fuzzy relation on X such that for all
Definition 11.
Let and be q-rung orthopair fuzzy sets on a non-empty set X. If is a q-rung orthopair fuzzy relation on then is called a q-rung orthopair fuzzy relation on if
and for all
Definition 12.
A q-rung orthopair fuzzy graph on a non-empty set X is a pair with a q-rung orthopair fuzzy set on X and a q-rung orthopair fuzzy relation on X such that
and for all , where, and represents the membership and non-membership functions of , respectively.
Example 1.
Figure 3 represents a 3-rung orthopair fuzzy graph where and
Definition 13.
A q-rung orthopair fuzzy digraph on a non-empty set X is a pair with a q-rung orthopair fuzzy set on X and a q-rung orthopair fuzzy relation on X such that
and for all , where, and represents the membership and non-membership functions of , respectively.
Definition 14.
An m-step q-rung orthopair fuzzy digraph of a q-ROF digraph has same vertex set and has a q-ROF edge between if there exist a q-ROF directed path in of length m such that
where m is positive integer.
Definition 15.
Let be a q-rung orthopair fuzzy digraph. The underlying q-rung orthopair fuzzy graph of is a q-ROFG with same vertex set and has a q-rung orthopair fuzzy edge between two distinct vertices such that
Definition 16.
Let be a q-rung orthopair fuzzy graph. An edge of is called strong if
and weak otherwise.
Definition 17.
Let be a q-rung orthopair fuzzy graph. The strength of q-rung orthopair fuzzy edge can be measured as
such that
Definition 18.
A q-rung orthopair fuzzy graph is called a q-rung orthopair fuzzy subgraph of if
such that for all
Moreover, a q-rung orthopair fuzzy subgraph is said to be spanning q-rung orthopair fuzzy subgraph of if
Example 2.
Definition 19.
In a q-rung orthopair fuzzy graph , a q-rung orthopair fuzzy subset of is called a q-rung orthopair fuzzy clique if q-rung orthopair fuzzy subgraph of induced by is complete.The size of largest q-ROF clique is called clique number of
Example 3.
Take such that each pair of vertices is joined by an edge in
A 3-rung orthopair fuzzy subgraph of induced by is given in Figure 6.
We see that is complete 3-rung orthopair fuzzy graph. Hence, 3-rung orthopair fuzzy subset is a 3-rung orthopair fuzzy clique.
Next we display an application of q-rung orthopair fuzzy clique.
Example 4.
A wholesaler must arrange a stall in an exhibition to display already existing brands and products. He must face a competition for higher manufacturing quality products. Many companies have turned to promotional tactics to recover their quality image. There are five well-known companies of different quality products as given in Table 1. The wholesaler must select some of them to display best product quality. If there is a big difference between qualities of products of some companies (i.e., more than 5%) then he cannot choose those companies. Clearly, the product quality of the stall is investigated by taking into account the lowest quality of their products.
To understand the idea of q-rung orthopair fuzzy cliques, take companies as vertices. If the products of two companies are displayed in same stall, then there is an edge between them. The information to organize such a stall can be summarized by 6-rung orthopair fuzzy graph given in Figure 7, where support for membership and non-membership of vertices for corresponding stall indicate their significant increase and not increase in product quality, respectively.
The membership grades of edges show the extent of both companies to be linked with same stall with respect to high quality products. The 6-rung orthopair fuzzy set
is a 6-rung orthopair fuzzy clique of as the 6-rung orthopair fuzzy graph induced by is a complete subgraph of Which shows that the wholesaler can display the products of companies and as they all are linked with each other and their product qualities are matching to some extent. Hence the corresponding product quality of stall is
Definition 20.
Let be a q-rung orthopair fuzzy graph. The collection of q-rung orthopair fuzzy cliques which cover all the edges of is called a q-rung orthopair fuzzy edge clique cover(q-rung orthopair FECC) of
The size of the smallest q-rung orthopair FECC is denoted by .
Example 5.
Some 4-ROF cliques of are given below
We see that 4-ROF subgraphs and of induced by and displayed in Figure 9 are complete. Also and induced by and covers all edges of Thus, the collection
is the 4-rung orthopair fuzzy edge clique cover. Moreover, it is the smallest 4-ROF edge clique cover as the size of all 4-ROF cliques other than and must be less than Hence,
Definition 21.
Let be a q-ROF acyclic digraph defined on . The injective mapping is called vertex labeling of such that if D has a q-ROF arc , then for all q-ROF vertices in In other words, every q-ROF arc goes from lower integer to higher integer.
4. q-Rung Orthopair Fuzzy Competition Graphs
In realistic scenarios, sometimes the fuzzy vertices and edges of fuzzy competition graphs may not be enough to explore various types of species or prey. For example, animals have such adaptations that enhance their ability for being successful predators like built for speed; use jaws, sharp teeth, and claws to catch and kill prey; and can camouflage to hide themselves from prey. These qualities are vague in nature. Thus, there may exist some predators which use more than one adaptation towards it is prey, for instance, a lion can prey either with sharp teeth or claws or even jaws i.e., the ability of a lion towards its target to prey with claws as well as without claws is non-zero. On the contrary, several prey species fight against predators through chemicals, communal defense or by ejecting toxic substances. To overcome such cases, we need orthopairs of fuzzy sets. Sahoo and Pal [28] discussed this situation for Atanassov’s IFSs with restriction on support for membership and support for non-membership which allows the orthopairs to be in the triangular region shown in Figure 1. Since q-rung orthopair fuzzy sets relax the condition with (for sufficiently large q), results increase in the area of permissible orthopairs. They can translate the uncertainty associated with both phases of species at the same time in a more comprehensive manner. This motivates the necessity of q-rung orthopair fuzzy competition graphs.
Definition 22.
A q-rung orthopair fuzzy out-neighborhood of a vertex v of a directed q-ROFG is the q-ROFS , where and defined by and defined by A q-rung orthopair fuzzy in-neighborhood of a vertex v of a directed q-ROFG is the q-ROFS , where and defined by and defined by
Definition 23.
Let be a directed q-rung orthopair fuzzy graph. The q-rung orthopair fuzzy competition graph of a q-rung orthopair fuzzy digraph is an undirected q-ROFG which has same q-ROF vertex set as in and has a q-ROF edge between two vertices in if and only if in and the support for membership and support for non-membership of edge in is
such that for all
Example 6.
The out-neighborhoods of q-ROF vertices are
By using Definition 23, we get the corresponding 3-ROFCG of as displayed in Figure 10
Theorem 1.
Let be a directed q-rung orthopair fuzzy graph. If contains only one element of then the q-ROF edge of is independent strong if and only if and
Theorem 2.
If all the edges of a q-rung orthopair fuzzy graph are independent strong, then and for all q-ROF edges in
Definition 24.
Let k be a non-negative real number and be a directed q-rung orthopair fuzzy graph. The q-rung orthopair fuzzy k-competition graph of a q-rung orthopair fuzzy digraph is an undirected q-ROFG which has same q-ROF vertex set as in and has a q-ROF edge between two vertices in if and only if and The support for membership and support for non-membership of edge in is
such that for all where
Example 7.
Consider a 3-rung orthopair fuzzy digraph given in Example 6, displayed in Figure 10 has only two 3-ROF edges, since
Thus, by using Definition 24, we get the corresponding 3-rung orthopair fuzzy -competition graph of as shown in Figure 11.
Theorem 3.
Let be a directed q-rung orthopair fuzzy graph. If and then the q-ROF edge is independent strong in
Definition 25.
Let p be a positive integer and be a directed q-rung orthopair fuzzy graph. The p-competition q-rung orthopair fuzzy graph of a q-rung orthopair fuzzy digraph is an undirected q-ROFG which has same q-ROF vertex set as in and has a q-ROF edge between two vertices in if and only if The support for membership and support for non-membership of edge in is
such that for all where
Example 8.
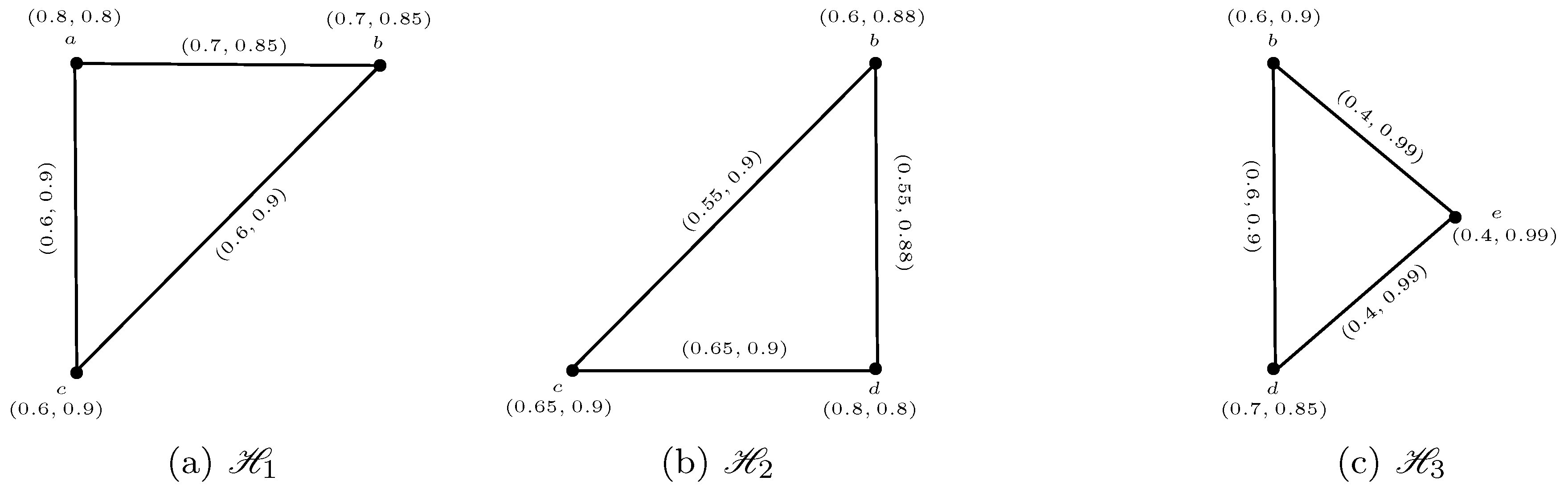
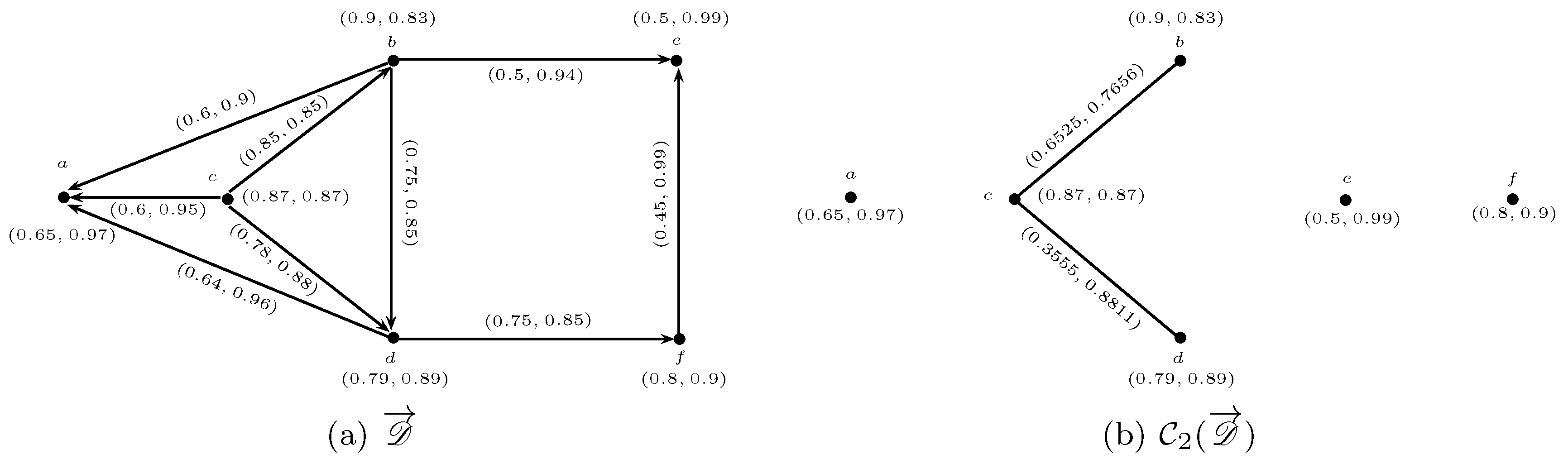
Let be a 5-rung orthopair fuzzy digraph, given in Figure 12a, where
has only two 5-ROF edges and , since
Thus, by using Definition 25, we get the corresponding 2-competition 5-rung orthopair fuzzy graph of as shown in Figure 12
Theorem 4.
Let be a directed q-rung orthopair fuzzy graph. If and in , then the q-ROF edge is independent strong, where
Definition 26.
A q-rung orthopair fuzzy m-step out-neighborhood of a vertex v of a directed q-ROFG is the q-ROF m-step set , where and defined by and defined by A q-rung orthopair fuzzy m-step in-neighborhood of a vertex v of a directed q-ROFG is the q-ROF m-step set , where and defined by and defined by
Definition 27.
Let be a directed q-rung orthopair fuzzy graph. The m-step q-rung orthopair fuzzy competition graph of a q-rung orthopair fuzzy digraph is an undirected q-ROFG which has same q-ROF vertex set as in and has a q-ROF edge between two vertices in if and only if in and the support for membership and support for non-membership of edge in is
such that for all
Example 9.
Let be a 5-rung orthopair fuzzy digraph, given in Figure 13a, where
has only two 5-ROF edges and , since
Thus, by using Definition 27, we get the corresponding 2-step 5-rung orthopair fuzzy competition graph of as shown in Figure 13
Theorem 5.
If all q-ROF edges of a q-rung orthopair fuzzy digraph are independent strong, then all the q-ROF edges of are independent strong.
Theorem 6.
Let be a q-rung orthopair fuzzy digraph defined on If , then has no edges.
Theorem 7.
If be a q-rung orthopair fuzzy digraph and is the m-step q-rung orthopair fuzzy digraph of then
Definition 28.
Let be a directed q-rung orthopair fuzzy graph. Let z be a common q- ROF prey of m-step out-neighborhoods of q- ROF vertices . Also let be minimum support for membership of q- ROF edges of the paths , respectively and be maximum support for non-membership of q- ROF edges of the paths , respectively. The m-step q- ROF prey is called independent strong q- ROF prey if for all
The strength of q-ROF prey z measured by the mappings and , is defined by such that
Example 10.
Let be a 5-rung orthopair fuzzy digraph, given in Figure 14. We see that a is common 5-ROF prey of 2-step out-neighborhoods of 5-ROF vertices b and ‘a’ is said to be strong 2-step 5-ROF prey, since there exist only two directed paths for a to be a common 5-ROF prey.
and
Theorem 8.
If a q-rung orthopair fuzzy prey z of is independent strong then the strength of and but converse may not hold.
Theorem 9.
A q-rung orthopair fuzzy graph is said to be a q-rung orthopair fuzzy competition graph of some q-rung orthopair fuzzy digraph if and only if where
Proof.
Let be a q-rung orthopair fuzzy digraph and be a q-rung orthopair fuzzy competition graph of such that Then by Definition 23
where and are q-rung orthopair fuzzy out-neighborhoods of vertices u and v, respectively. Consider the q-rung orthopair fuzzy cliques of such that
with
Let are the q-rung orthopair fuzzy subgraphs of induced by , respectively. Then by Definition of q-rung orthopair fuzzy clique, are complete q-rung orthopair fuzzy subgraphs of and every edge of must be in some i.e., there exist a collection of cliques which cover all edges of such that
called q-rung orthopair fuzzy edge clique cover. Then, clearly, the size of the smallest such q-rung orthopair FECC denoted by cannot exceed the number of vertices of i.e., Hence
Conversely, let and let be the collection of q-rung orthopair fuzzy cliques which covers all edges of by complete q-rung orthopair fuzzy subgraphs. Construct q-rung orthopair fuzzy digraph with such that for all the support for membership and non-membership of are same and
where are the isolated vertices, that is there exist arcs and in Also, if and only if with
Then is called q-rung orthopair fuzzy competition graph of D i.e., This completes the proof. □
The notion of triangulated graphs also arises when we deal with competition graphs. As the terminological background of a competition graph based on predator-prey relationships, consider the ecosystem in which three predators , and c, have a common prey x, which leads to the formation of a triangle in the graph. We now explore this situation for the q-rung orthopair fuzzy graph.
Definition 29.
A q-rung orthopair fuzzy graph is said to be triangulated if for every q-rung orthopair fuzzy cycle of length there is a q-rung orthopair fuzzy edge of joining two non-consecutive vertices of In other words, does not have a cycle of length as induced q-rung orthopair fuzzy subgraph.
Theorem 10.
Let is a q-rung orthopair fuzzy graph. If has q-ROF clique number 3 and then is the triangulated q-ROF competition graph.
Proof.
Let is a q-rung orthopair fuzzy graph with clique number 3. Let be a largest q-rung orthopair fuzzy clique of of size 3 and
Then induces a complete q-rung orthopair fuzzy subgraph of Clearly, is a q-ROF cycle of length 3 being a complete q-rung orthopair fuzzy generated subgraph. There is no q-ROF cycles of length in as it is the largest possible set of q-ROF mutually adjacent vertices. Since contains no induced q-ROF cycles of length greater than is triangulated. Also, since the size of smallest edge clique cover satisfies the relation 1, by Theorem 9, is a q-ROF competition graph. Hence, is triangulated q-ROF competition graph. □
Please note that if G is a triangulated graph then the vertex set of any induced cycle of length 3 must be a clique but this may not true for triangulated q-rung orthopair fuzzy graphs.
Theorem 11.
Let is a q-rung orthopair fuzzy graph. If is triangulated, then the vertex set of any induced q-ROF cycle of length 3 may not be a q-rung orthopair fuzzy clique of
Proof.
Let be a triangulated q-ROFG. Then has q-rung orthopair fuzzy cycle of length 3 as a generated subgraph. Let be such a q-ROF cycle of length 3 such that
and
The set is a q-ROF vertex set of Consider a complete q-ROFG induced by Then
Also Which shows that may not always less than or equal to Thus, the complete q-ROFG of may not be a subgraph of triangulated q-ROFG Hence, may not a q-rung orthopair fuzzy clique of □
Example 11.
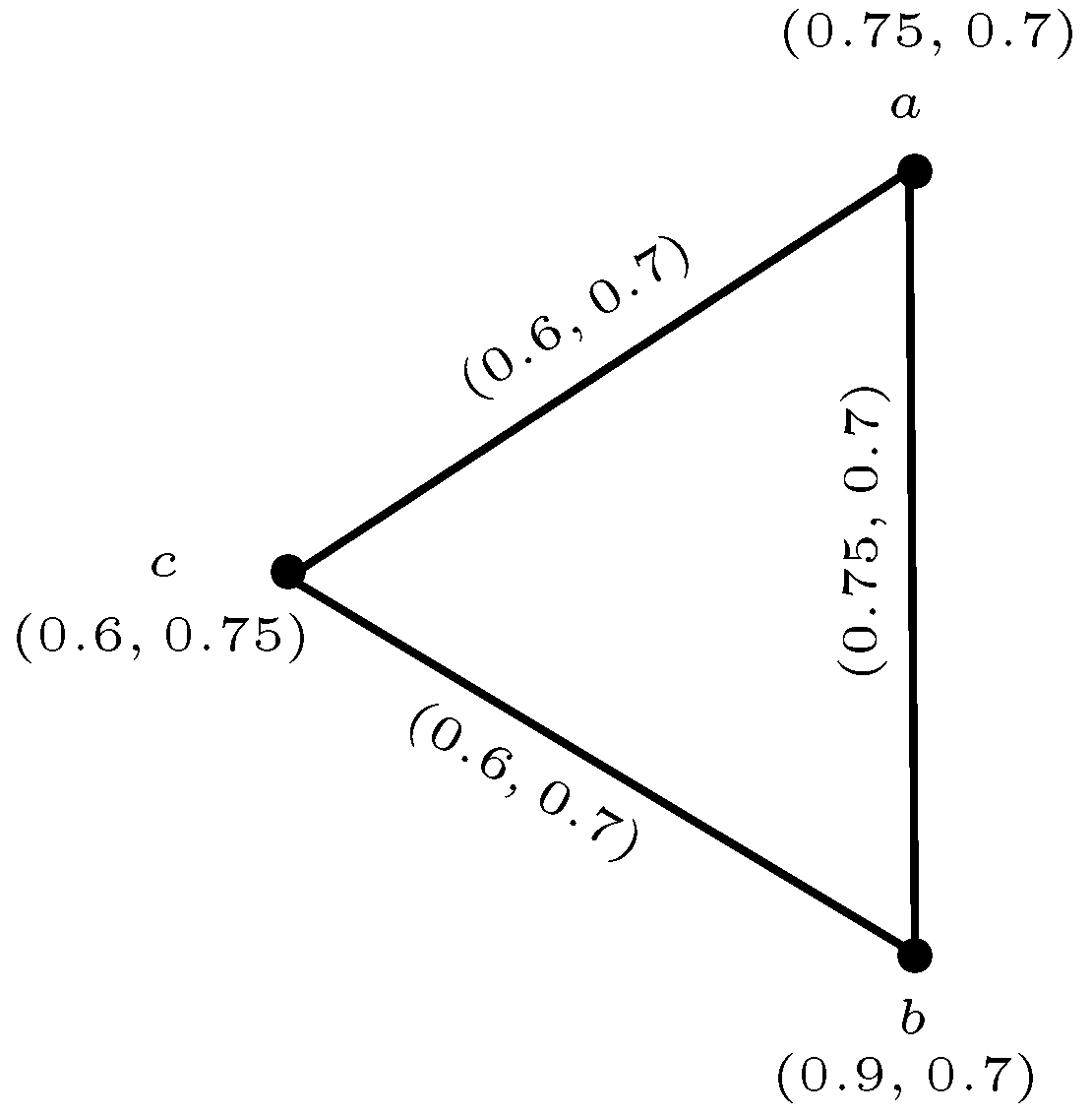
Consider a triangulated 3-rung orthopair fuzzy graph as shown in Figure 15.
Let be the q-ROF induced cycle of of length 3 as shown in Figure 16a. Name the q-ROF vertex set of as given by
Figure 16b represents a complete q-ROFG induced by Clearly, is not a subgraph of since
Hence, is not a q-rung orthopair fuzzy clique of One can see that the above result holds only when is complete.
4.1. Competition Number of q-ROFGs
A basic ecological principle is that two species compete if and only if their ecological niches overlap. In crisp graph theory, we can obtain corresponding digraphs by the scheme proposed by Roberts in [37], which led him to introduce the concept of competition number. The competition number has been extensively studied by many researchers for crisp graphs. While dealing with uncertainties of competition in many practical scenarios, the competition number also plays a vital role. However, when we deal with fuzziness, the exact fuzzy digraphs cannot be obtained from fuzzy competition graphs.
To understand our adopted approach to define the competition number in q-rung orthopair fuzzy environment, consider an example in which two persons are competing for an object, where the ability to compete is given by their membership grades. Now the problem is to find the extent of competition of both persons towards the object.
Let be a fuzzy directed graph. The out-neighborhoods of vertices are
The height of common neighborhood is
By definition of fuzzy competition graph
or
We know that
Thus, we can obtain the upper bounds and lower bounds of membership grades for edges in corresponding digraphs for the case when two species are competing for only one prey. However, when two species are competing for more than one prey, we cannot even find their bounds. Since the membership grade related to each directed edge of cannot be found exactly, we introduce the term ‘power of competition’, connected with each arc, to define the competition number of q-ROFGs. Also, we illustrate an algorithm in this context.
Theorem 12.
Let be a q-rung orthopair fuzzy graph then adding sufficient number of r isolated q-ROF vertices to such that
produces a q-rung orthopair fuzzy competition graph of some digraph
Proof.
Let be a q-rung orthopair fuzzy graph where, is q-rung orthopair fuzzy set on X and is a q-rung orthopair fuzzy relation on Construct a digraph as follows: Let be any two q-ROF vertices of such that or Add a q-ROF vertex such that
Remove the edge and draw directed edges(arcs) from u and v to such that the μ-power of competition and ν-power of competition of q-ROF vertices u and v towards the vertex (i.e., power of competition associated with arcs and ) are
Continuing the process, we get an acyclic digraph whose directed edges can be recognized by (7). This digraph gives a q-rung orthopair fuzzy competition graph where, is q-rung orthopair fuzzy set of r isolated q-ROF vertices added to This completes the proof. □
The method of constructing the corresponding digraph of a q-ROFG is illustrated in Algorithm 1. The complexity of Algorithm 1 is
| Algorithm 1.q-Rung orthopair fuzzy digraph INPUT: A q-ROFG OUTPUT: A q-ROF directed graph procedure Digraph fordo fordo if or then add such that end if end for end for fordo fordo while or do remove draw and such that end while end for end for end procedure |
Remark 1.
In Algorithm 1, the only information about directed edges of are their power of competition towards common prey. Thus, q-rung orthopair fuzzy out-neighborhoods of vertices can be defined in a similar manner by taking into account the power of competition of edges instead of their membership grades.
The Theorem 12 naturally guide us to define competition number of q-rung orthopair fuzzy graph
Definition 30.
Let be any q-rung orthopair fuzzy graph. The smallest possible number of isolated q-ROF vertices which when add in leads a q-rung orthopair fuzzy competition graph of certain acyclic digraph(as constructed in Algorithm 1), is called competition number of .
Roberts proved in [37] that if is a connected graph without triangles, then We now generalize this result for q-rung orthopair fuzzy graph.
Theorem 13.
If is a connected q-rung orthopair fuzzy graph defined on without any q-ROF triangle, then
Proof.
Let be a q-rung orthopair fuzzy graph defined on Suppose that is q-rung orthopair fuzzy competition graph constructed according to the Algorithm 1. Label the q-ROF vertices of such that every q-ROF arc goes from lower integer to higher integer in . For each q-ROF edge of there is a q-ROF vertex such that is common prey of u and v in Moreover, since has no q-ROF triangles, the are distinct. It follows that has at least q-ROF vertices Furthermore, since these q-ROF vertices all have at least two incoming q-ROF arcs in therefore, at least two of the q-ROF vertices of are not These q-ROF vertices are labeled 1 and where the q-ROF vertex labeled 1 has no incoming q-ROF arc and q-ROF vertex labeled 2 has only one incoming q-ROF arc. Hence,
implies that
This completes the proof. □
The above result only gives the simple lower bounds of competition number of q-rung orthopair fuzzy graphs for the case when q-ROFGs are triangle-free. In crisp graph theory, Opsut [40] improved this result by defining both upper and lower bounds for any graph in connection with the size of smallest edge clique cover. It can be generalized for q-rung orthopair fuzzy graphs as follows:
Lemma 1.
If is a connected q-rung orthopair fuzzy graph defined on with no q-ROF triangle, then the size of smallest q-rung orthopair fuzzy edge clique cover of is exactly equal to the number of edges in
Proof.
Let be a connected q-rung orthopair fuzzy graph defined on . Let be the q-ROF cliques of Since has no q-ROF triangle, therefore, each q-ROF clique must have at most two q-ROF vertices and in order to get complete q-ROF induced subgraph of Thus, the smallest q-rung orthopair fuzzy edge clique cover has q-ROF cliques equal to the number of edges of Hence, the size of smallest q-ROF edge clique cover is i.e., □
Theorem 14.
For any q-rung orthopair fuzzy graph
Proof.
Let be a q-rung orthopair fuzzy graph defined on Suppose that is q-rung orthopair fuzzy competition graph constructed according to the Algorithm 1. Label the integers to q-ROF vertices of so that every q-ROF arc goes from lower integer to higher integer in . In particular, the q-ROF vertex labeled 1 has no incoming q-ROF arc and q-ROF vertex labeled 2 has only one incoming q-ROF arc. Consider the set and for each the set Then, since is the competition graph for a digraph, each is a q-ROF clique of Moreover, the subgraphs induced by each must cover all q-ROF edges of If denotes the size of smallest edge clique cover of Then,
or
Which completes the proof of lower bounds of the competition number of
To prove its upper bounds, consider the q-ROF cliques belongs to smallest edge clique cover of Construct a digraph on the vertices q-ROFG of according to Algorithm 1, where the added isolated vertices are labeled Then is acyclic and is q-ROF competition graph for So by definition of competition number of q-ROF graph,
Hence, This completes the proof. □
4.2. m-Step Competition Number of q-ROFGs
Cho et al. in [8] use the notion of m-step competition number analogous to the competition number of Roberts [37]. They defined the m-step competition number of G as the smallest number r such that together with r isolated vertices is m-step competition graph of an acyclic digraph. Analogous to this eminent concept, we now define it as orthopair membership grades.
Theorem 15.
Let be a q-rung orthopair fuzzy graph and is an integer, then adding a sufficient number of r isolated q-ROF vertices for each edge of such that
produces an m-step q-rung orthopair fuzzy competition graph of some acyclic digraph for all
Proof.
Let be a q-rung orthopair fuzzy graph where is q-rung orthopair fuzzy set on X and is a q-rung orthopair fuzzy relation on Construct a digraph as follows: Let be any two vertices of such that or For each edge add vertices remove the edge and draw directed paths from u and v to of length The digraph whose q-ROF vertices consists of vertices of plus m q-ROF isolated vertices for each edge in can be defined as
such that for
and
such that power of competition of q-ROF vertices u and v towards the vertex is
and power of competition of q-ROF vertex towards are
for all
Continuing the process, we get an acyclic digraph which gives an m-step q-rung orthopair fuzzy competition graph where is q-rung orthopair fuzzy set of r isolated q-ROF vertices in This completes the proof. □
The method of constructing corresponding m-step digraph of a q-ROFG is demonstrated in Algorithm 2. The complexity of Algorithm 2 is
| Algorithm 2.q-RUNG ORTHOPAIR FUZZY DIGRAPH INPUT: A q-ROFG OUTPUT: A q-ROF directed graph procedure Digraph fordo fordo if or then add such that whiledo end while end if end for end for fordo fordo if or then remove draw directed paths and such that whiledo end while end if end for end for end procedure |
Remark 2.
In Algorithm 2, the only information about q-ROF arcs of directed paths of are the power of competition of q-ROF vertices u and v towards m-step common q-ROF prey. Thus, q-rung orthopair fuzzy m-step out-neighborhoods of vertices can be defined in a similar manner by taking into account the power of competition of arcs of directed paths instead of their membership grades.
Theorem 15 naturally guides us to define m-step competition number of q-rung orthopair fuzzy graph
Definition 31.
Let be any q-rung orthopair fuzzy graph. The smallest possible number of isolated q-ROF vertices which when add in leads an m-step q-rung orthopair fuzzy competition graph of some acyclic digraph is called m-step competition number of , denoted by
Cho et al. [8] proved a relation between m-step competition number and competition number of crisp graphs. We now generalize this relation for q-rung orthopair fuzzy graphs.
Theorem 16.
If is any q-rung orthopair fuzzy graph, then where m is a positive integer.
Proof.
Let is any q-rung orthopair fuzzy graph and be the m-step competition number of Then there exists an acyclic q-ROF digraph such that The q-ROF digraph is clearly acyclic and by the definition of competition number of q-ROFG it follows that
This completes the proof. □
Theorem 17.
If is a q-rung orthopair fuzzy graph defined on , then where m is a positive integer.
Proof.
Let be any q-rung orthopair fuzzy graph defined on By definition of m-step competition number of q-ROFG we have to add m vertices for at most each q-ROF edge. Since there are edges in therefore at most vertices must add in to make it q-ROF competition graph of acyclic digraph constructed according to Algorithm 2. Hence,
This completes the proof. □
Theorem 18.
If is a q-rung orthopair fuzzy graph without isolated q-ROF vertices, then where m is a positive integer.
Proof.
Let be any q-rung orthopair fuzzy graph defined on where Let be a smallest q-ROF edge clique cover of Then Construct an acyclic directed graph as according to Algorithm 2. Then, it can easily be checked that is acyclic and Thus,
Now, consider an acyclic q-ROF digraph so that along with isolated q-ROF vertices defines We can assign an acyclic labeling to as such that are the k added isolated q-ROF vertices. Then cannot be exerted as m-step q-ROF prey. Despite this, since two distinct q-ROF cliques in should prey on different m-step common q-ROF prey, there should be at least distinct q-ROF vertices operated as m-step common q-ROF prey. Therefore,
To conclude the proof of first inequality, we notice that is adjacent to at least one q-ROF vertex of as has no isolated q-ROF vertices. Consequently, should have an m-step common q-ROF prey in Since any q-ROF vertex possessing a label less than n cannot be an q-ROF out-neighbor of in it follows that
Hence,
□
The special case of the above theorem (i.e., for ) is proved by Opsut [40] for any crisp graph
The next corollary is an instant consequence of the above theorem.
Corollary 1.
For any complete q-rung orthopair fuzzy graph with
5. Application
Competition graphs are becoming increasingly significant as they can apply to many areas in which there occurs competition between entities. A general outlook of this fact as a source of an interesting graph theoretical idea that can be seen in the soil ecosystem. The q-rung orthopair fuzzy sets provide system modelers with more freedom and is less restrictive in permissible membership grades. To fully understand the concept of q-rung orthopair fuzzy competition graphs, we now display an important application of the competition graph under the Pythagorean fuzzy environment (taking ) to observe the strength of competition between plant-associated bacteria in the rhizosphere, or the soil ecosystem, with an algorithm.
5.1. Plant-Bacterial Interactions in Soil Ecosystem
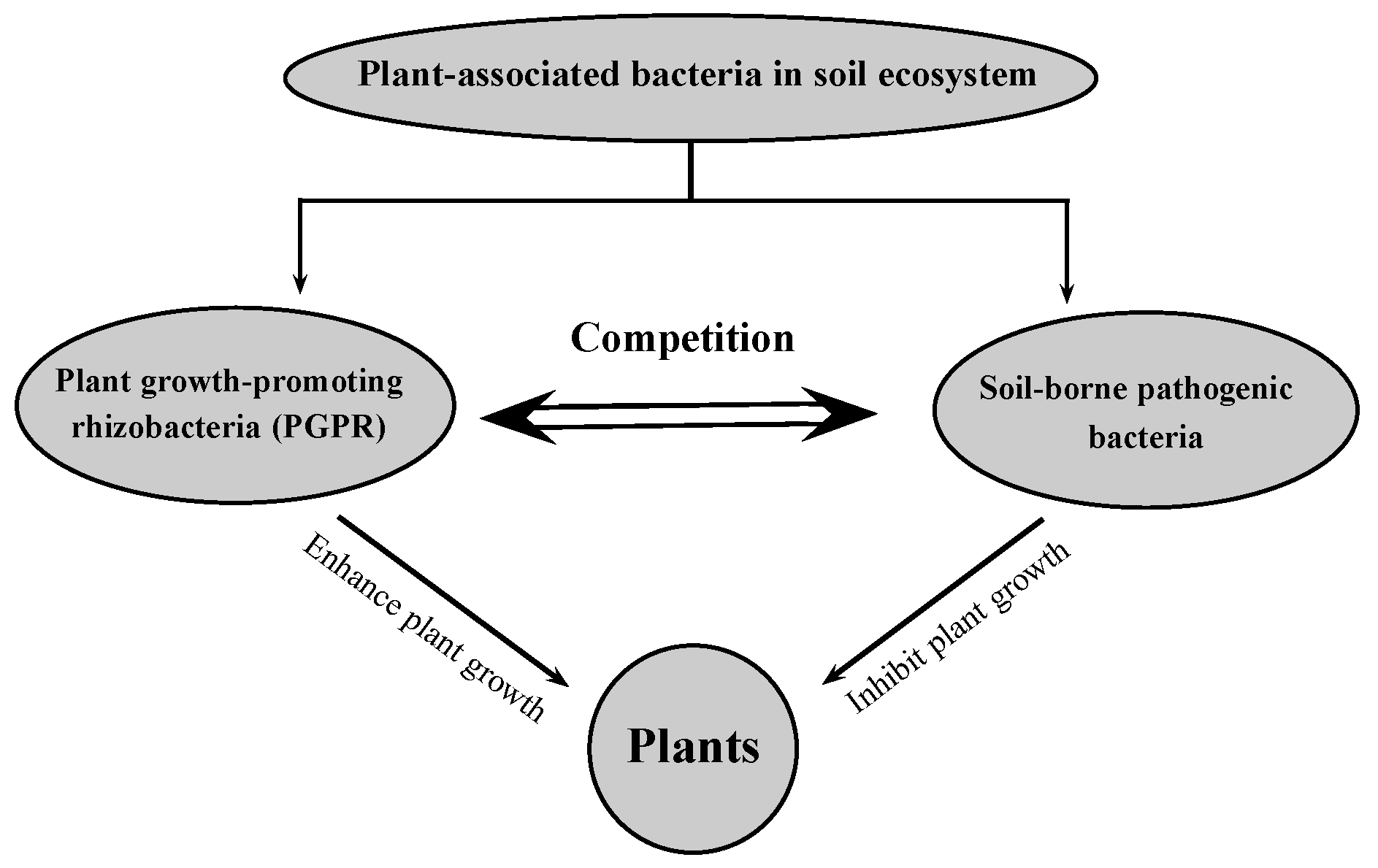
The rhizosphere represents a nutrient-rich habitat for microorganisms. Soil is a hub of countless living organisms that account of the proper maintenance of balanced nutrients in the soil ecosystem as well as for better yield and growth of plants. These organisms include bacteria, fungi, soil algae or actinomycete. Among them, bacteria are of great importance with respect to soil fertility and plant health. They may be beneficial or hazardous for plants and the soil ecosystem. There are some bacteria commonly known as plant growth-promoting rhizobacteria (PGPR) which have growth-stimulating potential and enhance antioxidant enzymatic activity in plants, promote disease suppression and reduce stress susceptibility [44]. Contrary to this, pathogenic microorganisms affecting plant health are a major and chronic threat to food production and ecosystem stability worldwide. Thus, there are some bacteria which are reported as pathogenic for soil environment, plant growth, and development. These soil-borne bacteria inhibit plant growth due to the release of some toxic compounds in the rhizosphere. The inhibition in plant growth ultimately results in the lower yield of plants [45].
The Figure 17 explores competition among plant-associated bacteria in soil ecosystem.
The ameliorating effects of PGPR and deleterious effects of phytopathogenic bacteria not only result in the promotion and retardation of growth parameters of plants, respectively, but also biochemical parameters such as chlorophyll content, proline content, carbohydrates, lipids, protein contents, and phenolic compounds. Hence, these facts employ the critiques made by several researchers that there is a competition between PGPR and soil-borne phytopathogenic bacteria which are present in soil ecosystem. These both types of bacteria compete to have their domination effect on plants. Side by side, there is also severe competition between all PGPR and in between all soil-borne phytopathogenic bacteria with each other to influence the growth of plants.
Consider an example of 12 bacteria in soil ecosystem. The set of PGPR {Bacillus pumulis, Bacillus atrophaeus, Staphylococcus lentus, Bacillus cereus, Achromobacter piechaudii, Azospirillum brasilense, Pseudomonas fluorescens} and phytopathogenic bacteria {Agrobacterium tumefaciens, Xanthomonas oryzae, Xylella fastidiosa, Pseudomonas syringae, Ralstonia solanacearum} are competing for following set of growth and biochemical parameters of plant {Shoot length, Root length, Plant biomass, Number of leaves, Chlorophyll content, Protein content, Proline content, Auxin content}. The estimated values for these growth and biochemical parameters with respect to selected bacterial species are given in Table 2.
A Pythagorean fuzzy digraph presenting such a soil ecosystem, shown in Figure 18, displays bacterial competition for particular parameters resulting in plant’s growth.
The membership degree of each soil-borne phytopathogenic bacteria represents the extent of inhibition and non-membership degree represents the extent of non-inhibition in plant growth. The phytopathogenic bacteria can be represented by orthopair as:
(Inhibition in plant growth, Not inhibition in plant growth).
Moreover, the participation of plant parameters in the growth of a plant is shown by their membership values, and non-participation is represented by its non-membership values. For example, the orthopair corresponding to shoot length is . The support for membership ’ shows that the role of shoot length is in growth of plant, of it does not take part in growth and there is hesitation of about .
The arcs in the Pythagorean fuzzy digraph indicate the influence of bacteria on plant growth and biochemical parameters. For example, the bacteria ‘Bacillus pumulis’ has the influence on two parameters, namely shoot length and auxin content. It can influence both equally as the degree of membership is while having different degrees of non-membership and hesitation Thus, the influential approach of bacteria towards plant parameters can be displayed in the form of an orthopair:
(Effectiveness of bacteria on plant parameters, Ineffectiveness of bacteria on plant parameters).
The Pythagorean fuzzy competition graph can be constructed to investigate the strength of competition between bacteria for growth of plant. The Pythagorean fuzzy out-neighborhoods of bacteria are displayed in Table 3.
This is an acyclic Pythagorean fuzzy digraph of the soil ecosystem/rhizosphere in which the orthopair assigned to each vertex and arc indicates its support for membership (membership degree) and support against membership (non-membership degree) under Pythagorean fuzzy environment. The membership degree of each PGPR represents the extent of amelioration and non-membership degree represents extent of non-amelioration in the growth of a plant. The PGPR can be represented by a pair of disjoint sets called orthopair:
(Amelioration in plant growth, Not amelioration in plant growth).
The corresponding competition graph of Pythagorean fuzzy soil ecosystem Figure 18 is displayed in Figure 19.
The edge connecting two bacteria in Pythagorean fuzzy competition graph highlights that both bacteria are competing for a particular biochemical or growth parameter of plant. Table 4 gives the strength of competition of each bacterium ’ for parameter ’ with respect to plant growth promotion. For instance, the bacteria B. atrophaeus, S. lentus and P. syringae are competing for the growth parameter “plant biomass” with strengths and respectively. We see that P. syringae has maximum strength of competition among these bacteria. Consequently, the bacterium “P. syringae” has more influential power on the growth parameter “plant biomass” as compared to bacteria B. atrophaeus and S. lentus and finally it inhibits the biomass of plant being a destructive phytopathogenic bacteria. In other words, the toxicity of phytopathogenic bacteria “P. syringae” is more effective/dominating than growth-promoting potential of PGPR B. atrophaeus and S. lentus.
In Table 4, some bacteria have equal maximum strength of competition for plant parameters. To assess which one has dominant influence on plant parameters, their support for amelioration or inhibition can be taken into account. For example, bacteria A. brasilense and R. solanacearum are competing for biochemical parameter “chlorophyll content” with same strength . The support for amelioration of A. brasilense is which is more than its support for not amelioration i.e., , while the bacterium R. solanacearum has support for inhibition and support for non-inhibition. Thus, we conclude that the bacterium “A. brasilense” is more effective to enhance the chlorophyll content in the plant as compared to R. solanacearum, which leads to inhibition of chlorophyll content.
The method for constructing a q-rung orthopair fuzzy competition graph of a digraph depicting plant-bacterial interactions in the soil ecosystem and to find strength of competition between bacteria is illustrated in Algorithm 3. The complexity of Algorithm 3 is
| Algorithm 3. STRENGTH OF COMPETITION OF BACTERIA INPUT: A q-ROF digraph , where involve ’ bacteria and ’ plant parameters. OUTPUT: Strength of competition of bacteria for plant parameters procedure Strength of competition fordo fordo if or then else end if end for end for fordo fordo ifthen else end if end for end for Number of bacteria competing for fordo fordo end for end for end procedure |
6. Conclusions
One of the most important research directions is how to express uncertain information in human analysis. IFSs and PFSs are both a good way to deal with fuzzy information as pairs of disjoint sets, called orthopairs. The q-ROFSs, superior to IFSs and PFSs, broaden the space of vague information. Our current work has dealt with competition graphs under the q-rung orthopair fuzzy environment. The present investigation has provided more precision, pliability, and consistency for species and prey in a food web. Thus, a lot of competition in the real world can be designed by q-ROFCGs due to its notable characteristics which provides a substantial benefit in modeling human knowledge. The proposed concept of the q-rung orthopair fuzzy clique can well express several real-world problems. This paper has explored one example in this context. Moreover, the study has clearly analyzed the concept of competition number of q-ROFGs, which governs the altering of any q-ROFG into corresponding q-ROFCG of some digraph. In conclusion, we have explored the necessity of q-ROFCGs with an application in soil ecosystem and designed an algorithm to evaluate the strength of competition among bacteria. In future research, we will extend this work to (1) interval-valued q-rung orthopair fuzzy competition graphs; (2) q-rung orthopair fuzzy competition hypergraphs; and (3) q-rung picture fuzzy competition graphs.
Author Contributions
A.H., M.A. and A.F. conceived of the presented idea. A.H and A.F. developed the theory and performed the computations. M.A verified the analytical methods.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cohen, J.E. Interval Graphs and Food Webs: A Finding and a Problem; Document 17696-PR; RAND Coporation: Santa Monica, CA, UA, 1968. [Google Scholar]
- Cable, C.; Jones, K.F.; Lundgren, J.R.; Seager, S. Niche graphs. Discret. Appl. Math. 1989, 23, 231–241. [Google Scholar] [CrossRef] [Green Version]
- Dutton, R.D.; Brigham, R.C. A characterization of competition graphs. Discret. Appl. Math. 1983, 6, 315–317. [Google Scholar] [CrossRef] [Green Version]
- Isaak, G.; Kim, S.R.; McKee, T.A.; McMorris, F.R.; Roberts, F.S. 2-competition graphs. SIAM J. Discret. Math. 1992, 5, 524–538. [Google Scholar] [CrossRef]
- Kim, S.R. Graphs with one hole and competition number one. J. Korean Math. Soc. 2005, 42, 1251–1264. [Google Scholar] [CrossRef]
- Kim, S.R.; McKee, T.A.; McMorris, F.R.; Roberts, F.S. p-competition graphs. Linear Algebra Its Appl. 1995, 217, 167–178. [Google Scholar] [CrossRef]
- Scott, D.D. The competition-common enemy graph of a digraph. Discret. Appl. Math. 1987, 17, 269–280. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.H.; Kim, S.; Nam, Y. The m-step competition graph of a digraph. Discret. Appl. Math. 2000, 105, 115–127. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Kaufmann, A. Introduction a la Theorie des Sousensembles Flous; Massonet cie: Paris, France, 1973. [Google Scholar]
- Zadeh, L.A. Similarity relations and fuzzy ordering. Inf. Sci. 1971, 3, 177–200. [Google Scholar] [CrossRef]
- Rosenfeld, A. Fuzzy graphs. In Fuzzy Sets and Their Applications; Zadeh, L.A., Fu, K.S., Shimura, M., Eds.; Academic Press: New York, NY, USA, 1975; pp. 77–95. [Google Scholar]
- Atanassov, K. Intuitionistic fuzzy sets: Theory and applications. Fuzzy Sets Syst. 1986, 20, 87–96. [Google Scholar] [CrossRef]
- Yager, R.R. Pythagorean fuzzy subsets. In Proceedings of the Joint IFSA World Congress and NAFIPS Annual Meeting, Edmonton, AB, Canada, 24–28 June 2013; pp. 57–61. [Google Scholar]
- Yager, R.R.; Abbasov, A.M. Pythagorean membership grades, complex numbers, and decision making. Int. J. Intell. Syst. 2013, 28, 436–452. [Google Scholar] [CrossRef]
- Yager, R.R. Pythagorean membership grades in multi-criteria decision making. IEEE Trans. Fuzzy Syst. 2014, 22, 958–965. [Google Scholar] [CrossRef]
- Akram, M.; Dar, J.M.; Naz, S. Certain graphs under Pythagorean fuzzy environment. Complex Intell. Syst. 2019. [Google Scholar] [CrossRef]
- Akram, M.; Habib, A.; Ilyas, F.; Dar, J.M. Specific types of Pythagorean fuzzy graphs and application to decision-making. Math. Comput. Appl. 2018, 23, 42. [Google Scholar] [CrossRef]
- Akram, M.; Dar, J.M.; Farooq, A. Planar graphs under Pythagorean fuzzy environment. Mathematics 2018, 6, 278. [Google Scholar] [CrossRef]
- Akram, M.; Naz, S. Energy of Pythagorean fuzzy graphs with applications. Mathematics 2018, 6. [Google Scholar] [CrossRef]
- Naz, S.; Ashraf, S.; Akram, M. A novel approach to decision-making with Pythagorean fuzzy information. Mathematics 2018, 6, 95. [Google Scholar] [CrossRef]
- Yager, R.R. Generalized orthopair fuzzy sets. IEEE Trans. Fuzzy Syst. 2017, 25, 1222–1230. [Google Scholar] [CrossRef]
- Liu, P.; Wang, P. Some q-rung orthopair fuzzy aggregation operators and their applications to multiple-attribute decision making. Int. J. Intell. Syst. 1983, 33, 259–280. [Google Scholar] [CrossRef]
- Ali, M.I. Another view on q-rung orthopair fuzzy sets. Int. J. Intell. Syst. 2018, 33, 2139–2153. [Google Scholar] [CrossRef]
- Samanta, S.; Pal, M. Fuzzy k-competition graphs and p-competition fuzzy graphs. Fuzzy Inf. Eng. 2013, 5, 191–204. [Google Scholar] [CrossRef]
- Samanta, S.; Pal, M.; Pal, A. Some more results on fuzzy k-competition graphs. Int. J. Adv. Res. Artif. Intell. 2014, 3, 60–67. [Google Scholar] [CrossRef]
- Samanta, S.; Akram, M.; Pal, M. m-step fuzzy competition graphs. J. Appl. Math. Comput. 2015, 47, 461–472. [Google Scholar] [CrossRef]
- Sahoo, S.; Pal, M. Intuitionistic fuzzy competition graphs. J. Appl. Math. Comput. 2016, 52, 37–57. [Google Scholar] [CrossRef]
- Nasir, M.; Siddique, S.; Akram, M. Novel properties of intuitionistic fuzzy competition graphs. J. Uncertain Syst. 2017, 11, 49–67. [Google Scholar]
- Al-Shehri, N.O.; Akram, M. Bipolar fuzzy competition graphs. Ars Comb. 2015, 121, 385–402. [Google Scholar]
- Sarwar, M.; Akram, M. Novel concepts of bipolar fuzzy competition graphs. J. Appl. Math. Comput. 2017, 54, 511–547. [Google Scholar] [CrossRef]
- Sarwar, M.; Akram, M. Certain algorithms for computing strength of competition in bipolar fuzzy graphs. Int. J. Uncertain Fuzziness Knowl. Based Syst. 2017, 25, 877–896. [Google Scholar] [CrossRef]
- Akram, M.; Nasir, M. Interval-valued neutrosophic competition graphs. Ann. Fuzzy Math. Inf. 2017, 14, 99–120. [Google Scholar]
- Akram, M.; Sarwar, M. Novel applications of m-polar fuzzy competition graphs in decision support system. Neural Comput. Appl. 2018, 30, 3145–3165. [Google Scholar] [CrossRef]
- Sarwar, M.; Akram, M.; Alshehri, N.O. A new method to decision-making with fuzzy competition hypergraphs. Symmetry 2018, 10, 404. [Google Scholar] [CrossRef]
- Suna, F.; Wanga, X.; Qub, X. Cliques and clique covers in fuzzy graphs. J. Intell. Fuzzy Syst. 2016, 31, 1245–1256. [Google Scholar] [CrossRef]
- Roberts, F.S. Food Webs, competition graphs, and the boxicity of ecological phase space. In Theory and Applications of Graphs; Alavi, Y., Lick, D., Eds.; Springer: New York, NY, USA, 1978; pp. 477–490. [Google Scholar]
- Kim, S.R.; Roberts, F.S. Competition numbers of graphs with a small number of triangles. Discret. Appl. Math. 1997, 78, 153–162. [Google Scholar] [CrossRef] [Green Version]
- Lundgren, J.R.; Maybee, J.S. A characterization of graphs of competition number m. Discret. Appl. Math. 1983, 6, 319–322. [Google Scholar] [CrossRef]
- Opsut, R.J. On the computation of the competition number of a graph. SIAM J. Algebr. Discret. Math. 1982, 3, 420–428. [Google Scholar] [CrossRef]
- Sano, Y. A generalization of opsut’s lower bounds for the competition number of a graph. Graphs Comb. 2013, 29, 1543–1547. [Google Scholar] [CrossRef]
- Jenson, J.B.; Gutin, G.Z. Digraphs: Theory, Algorithms and Applications; Springer: Berlin, Germany, 2009. [Google Scholar]
- Mordeson, J.N.; Nair, P.S. Successor and source of (fuzzy) finite state machines and (fuzzy) directed graphs. Inf. Sci. 1996, 95, 113–124. [Google Scholar] [CrossRef]
- Habib, S.; Fatima, H.; Ahmed, A. Comparative analysis of pre-germination and post-germination inoculation treatments of Zea mays L. to mitigate chromium toxicity in Cr-contaminated soils. Pol. J. Environ. Stud. 2019, 28. [Google Scholar] [CrossRef]
- Mansfield, J.; Genin, S.; Magori, S.; Citovsky, V.; Sriariyanum, M.; Ronald, P.; Dow, M.; Verdier, V.; Beer, S.V.; Machado, M.A.; et al. Top 10 plant pathogenic bacteria in molecular plant pathology. Mol. Pol. Path. 2012, 13, 614–629. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Spaces of acceptable q-rung orthopairs.

Figure 2.
Geometric interpretation of height of q-ROFS (q-rung orthopair fuzzy set).

Figure 3.
A 3-rung orthopair fuzzy graph .

Figure 4.
(a) 3-Rung Orthopair Fuzzy Subgraph; (b) Spanning 3-Rung Orthopair Fuzzy Subgraph.

Figure 5.
A 3-rung orthopair fuzzy graph .

Figure 6.
A 3-rung orthopair fuzzy induced subgraph .

Figure 7.
.

Figure 8.
A 4-rung orthopair fuzzy graph .

Figure 9.
4-rung orthopair fuzzy induced subgraphs. (a) ; (b) ; (c) .

Figure 10.
Competition graph of directed graph. (a) ; (b) .

Figure 11.
.

Figure 12.
p-Competition q-rung orthopair fuzzy graph. (a) ; (b) .

Figure 13.
m-Step q-rung orthopair fuzzy competition graph. (a) ; (b) .

Figure 14.
A strong 2-step 5-rung orthopair fuzzy prey.

Figure 15.
A triangulated q-rung orthopair fuzzy graph .

Figure 16.
(a) ; (b) .

Figure 17.
Potential role of plant-associated bacteria in soil ecosystem.

Figure 18.
Pythagorean fuzzy soil ecosystem digraph.

Figure 19.
Pythagorean Fuzzy Competition Graph.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Quality of Products.
| Company | Product Quality |
|---|---|
| 70% | |
| 77% | |
| 65% | |
| 60% | |
| 73% |
Table 2.
Impact of Bacterial Species on Plant Parameters.
| Plant | Bacterial | Effectiveness of Bacterial Species | |
|---|---|---|---|
| Parameters | Species | on Plant Parameters | |
| Plant growth parameters | Shoot length | B. pumulis | inches |
| A. brasilense | 11.7 inches | ||
| P. fluorescens | 14.1 inches | ||
| R. solanacearum | 3.2 inches | ||
| Root length | B. cereus | 8.9 inches | |
| A. piechaudii | 11.6 inches | ||
| Plant biomass | B. atrophaeus | 7.2 g | |
| S. lentus | 9.6 g | ||
| P. syringae | 1.7 g | ||
| No. of leaves | S. lentus | 12 | |
| A. brasilense | 10 | ||
| P. fluorescens | 15 | ||
| Biochemical parameters | Proline content | A. tumefaciens | 35 g/g |
| X. oryzae | 40 g/g | ||
| X. fastidiosa | 51 /g | ||
| Protein content | X. fastidiosa | 43 g/g | |
| P. syringae | 59 g/g | ||
| Auxin content | B. pumulis | 266 g/g | |
| R. solanacearum | 68 g/g | ||
| Chlorophyll content | A. brasilense | 6.7 g/g | |
| R. solanacearum | 2.9 g/g | ||
Table 3.
Pythagorean fuzzy out-neighborhoods of bacteria.
| Bacteria | |
|---|---|
| Bacillus pumulis | {(Shoot length, 0.7, 0.5), (Auxin content, 0.7, 0.1)} |
| Bacillus atrophaeus | {(Plant biomass, 0.7, 0.5)} |
| Staphylococcus lentus | {(Plant biomass, 0.6, 0.4), (No. of leaves, 0.4, 0.2)} |
| Bacillus cereus | {(Root length, 0.4, 0.3)} |
| Achromobacter piechaudii | {(Root length, 0.8, 0.6)} |
| Azospirillum brasilense | {(Shoot length, 0.6, 0.5), (No. of leaves, 0.5, 0.4), (Chlorophyll content, 0.7, 0.4)} |
| Pseudomonas fluorescens | {(Shoot length, 0.8, 0.5), (No. of leaves, 0.7, 0.7)} |
| Agrobacterium tumefaciens | {(Proline content, 0.3, 0.5)} |
| Xanthomonas oryzae | {(Proline content, 0.4, 0.7)} |
| Xylella fastidiosa | {(Proline content, 0.6, 0.7), (Protein content, 0.2, 0.5)} |
| Pseudomonas syringae | {(Plant biomass, 0.3, 0.9), (Protein content, 0.5, 0.85)} |
| Ralstonia solanacearum | {(Shoot length, 0.6, 0.7), (Auxin content, 0.2, 0.8), (Chlorophyll content, 0.3, 0.9)} |
Table 4.
Strength of competition of bacteria for plant parameters.
| Plant Parameters | Bacteria | Bacteria in Competition | R (Bacteria, Parameter) | S (Bacteria, Parameter) |
|---|---|---|---|---|
| Shoot length | B. pumulis | A. brasilense, P. fluorescens, R. solanacearum | (0.387, 0.353) | 1.74 |
| A. brasilense | B. pumulis, P. fluorescens, R. solanacearum | (0.34, 0.353) | 1.693 | |
| P. fluorescens | B. pumulis, A. brasilense, R. solanacearum | (0.387, 0.353) | 1.74 | |
| R. solanacearum | B. pumulis, A. brasilense, P. fluorescens | (0.18, 0.56) | 1.74 | |
| Root length | B. cereus | A. piechaudii | (0.28, 0.36) | 1.64 |
| A. piechaudii | B. cereus | (0.28, 0.36) | 1.64 | |
| Plant biomass | B. atrophaeus | S. lentus, P. syringae | (0.27, 0.415) | 1.685 |
| S. lentus | B. atrophaeus, P. syringae | (0.27, 0.415) | 1.685 | |
| P. syringae | B. atrophaeus, S. lentus | (0.12, 0.63) | 1.75 | |
| Number of leaves | S. lentus | A. brasilense, P. fluorescens | (0.3, 0.24) | 1.54 |
| A. brasilense | S. lentus, P. fluorescens | (0.35, 0.225) | 1.575 | |
| P. fluorescens | S. lentus, A. brasilense | (0.37, 0.265) | 1.635 | |
| Proline content | A. tumefaciens | X. oryzae, X. fastidiosa | (0.09, 0.595) | 1.685 |
| X. oryzae | A. tumefaciens, X. fastidiosa | (0.1, 0.63) | 1.73 | |
| X. fastidiosa | A. tumefaciens, X. oryzae | (0.07, 0.595) | 1.665 | |
| Protein content | X. fastidiosa | P. syringae | (0.4, 0.595) | 1.995 |
| P. syringae | X. fastidiosa | (0.4, 0.595) | 1.995 | |
| Auxin content | B. pumulis | R. solanacearum | (0.18, 0.56) | 1.74 |
| R. solanacearum | B. pumulis | (0.18, 0.56) | 1.74 | |
| Chlorophyll content | A. brasilense | R. solanacearum | (0.18, 0.56) | 1.74 |
| R. solanacearum | A. brasilense | (0.18, 0.56) | 1.74 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Habib, A.; Akram, M.; Farooq, A. q-Rung Orthopair Fuzzy Competition Graphs with Application in the Soil Ecosystem. Mathematics 2019, 7, 91. https://doi.org/10.3390/math7010091
AMA Style
Habib A, Akram M, Farooq A. q-Rung Orthopair Fuzzy Competition Graphs with Application in the Soil Ecosystem. Mathematics. 2019; 7(1):91. https://doi.org/10.3390/math7010091
Chicago/Turabian StyleHabib, Amna, Muhammad Akram, and Adeel Farooq. 2019. "q-Rung Orthopair Fuzzy Competition Graphs with Application in the Soil Ecosystem" Mathematics 7, no. 1: 91. https://doi.org/10.3390/math7010091
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.