Causality Effects of Interventions and Stressors on Driving Behaviors under Typical Conditions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Motivation
2. Introduction
3. The Dataset
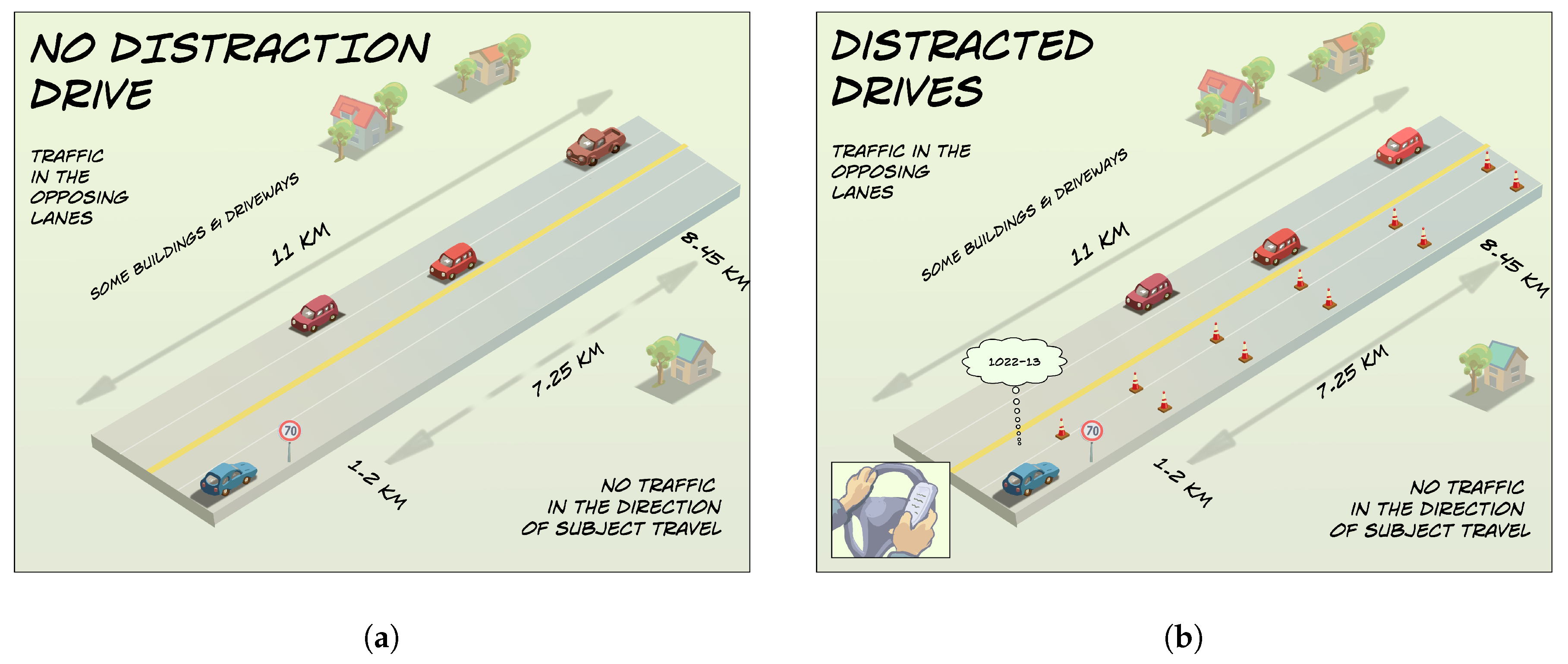
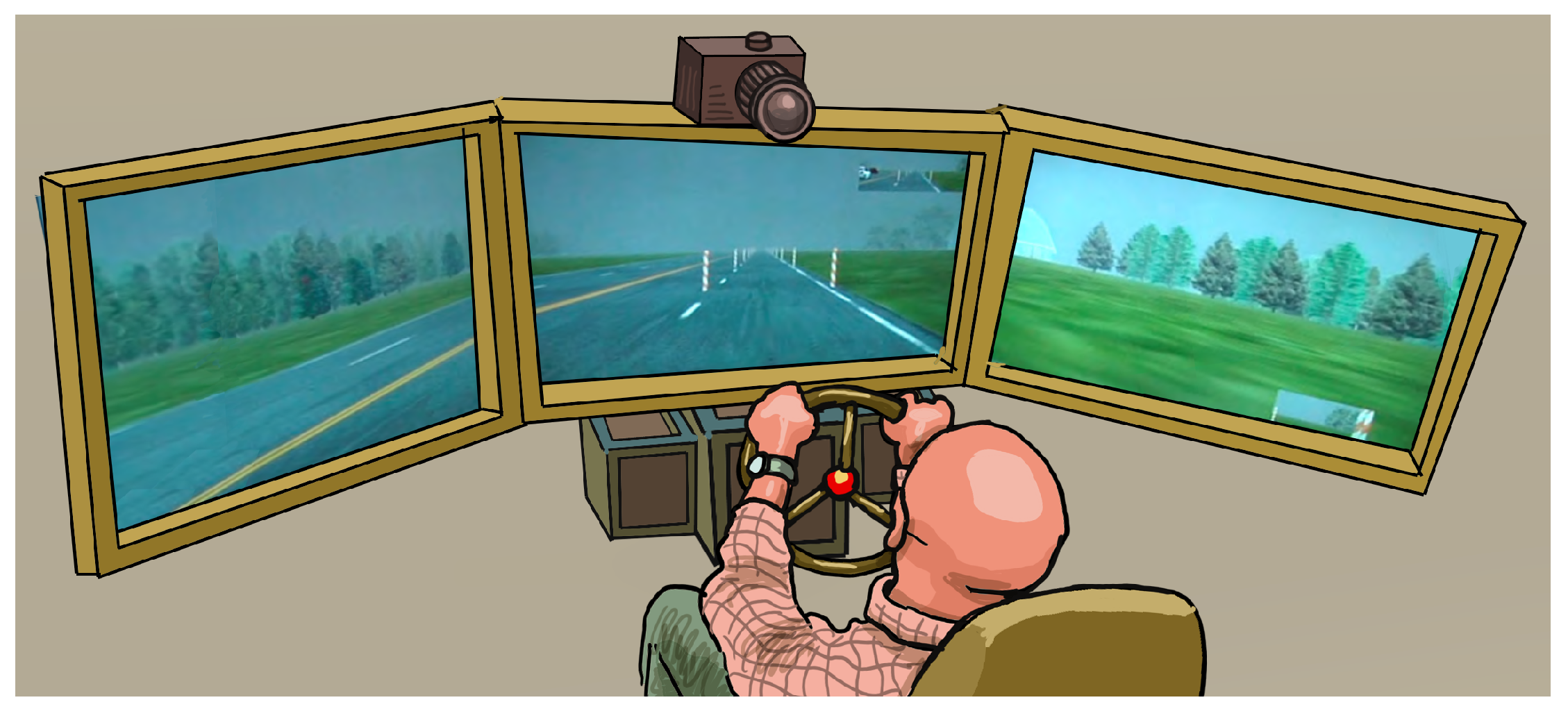
3.1. Two Controlled Experiments in Failure Drive
3.2. Data Loading and Formatting
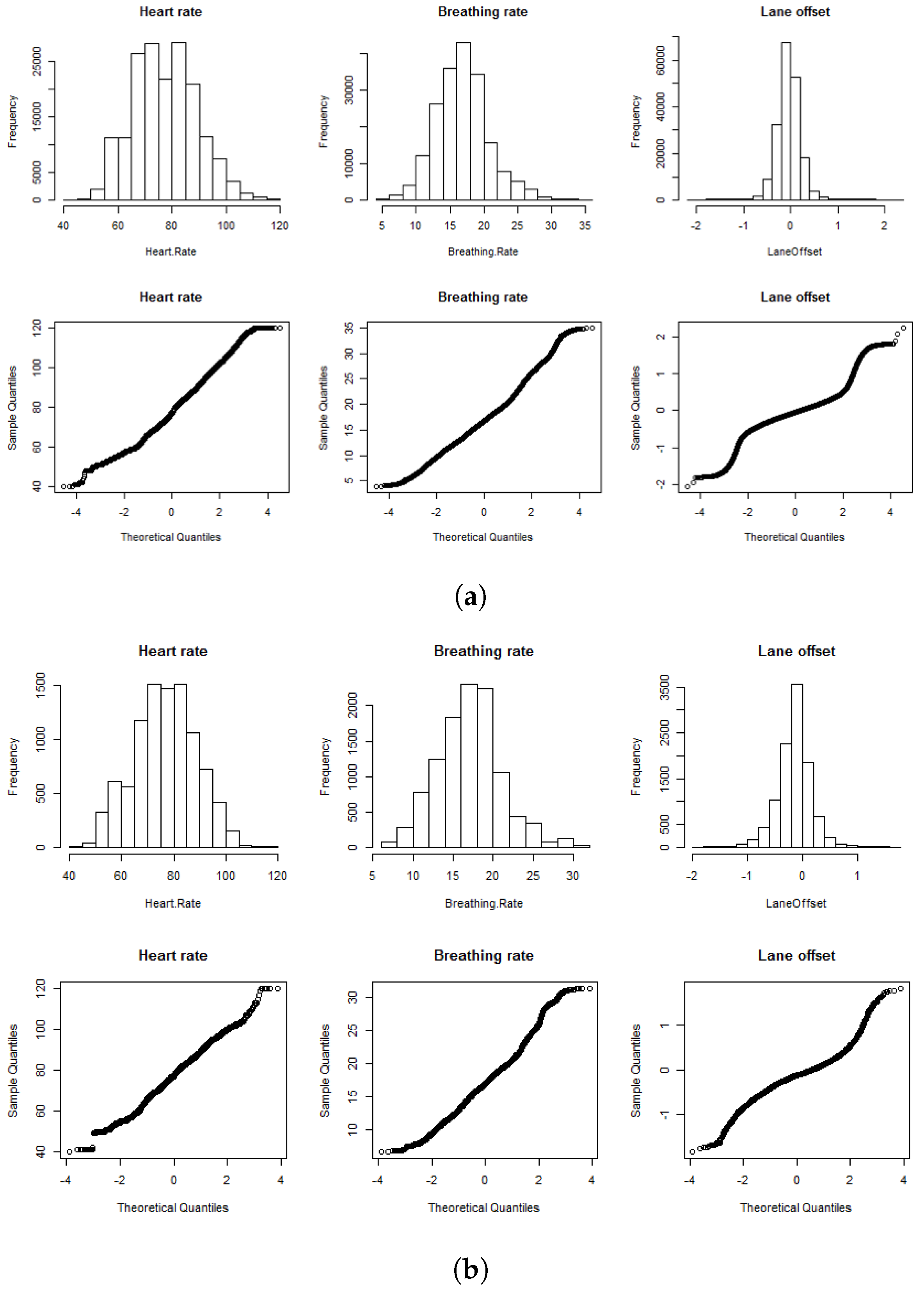
3.3. Data Processing
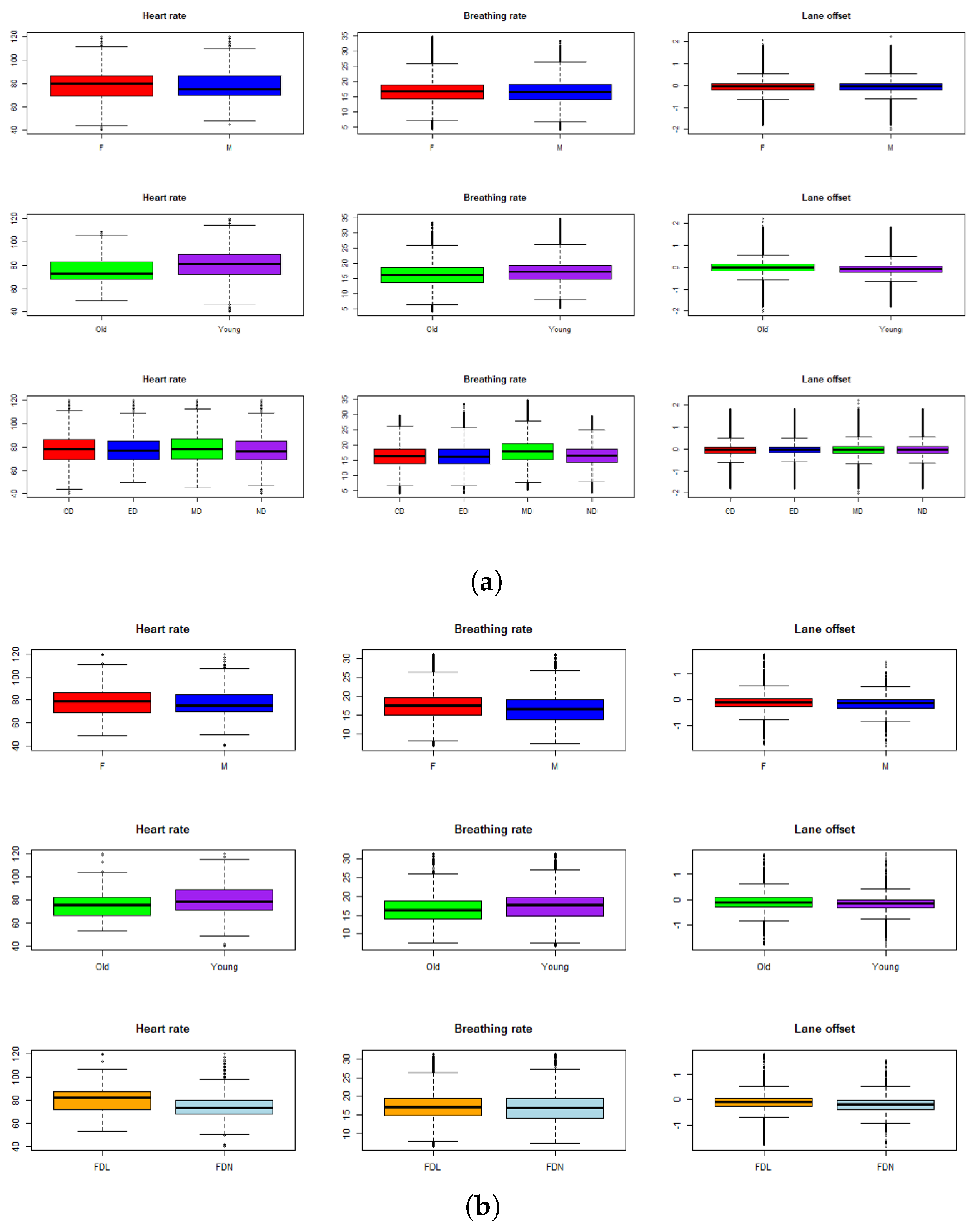
4. Analysis and Results
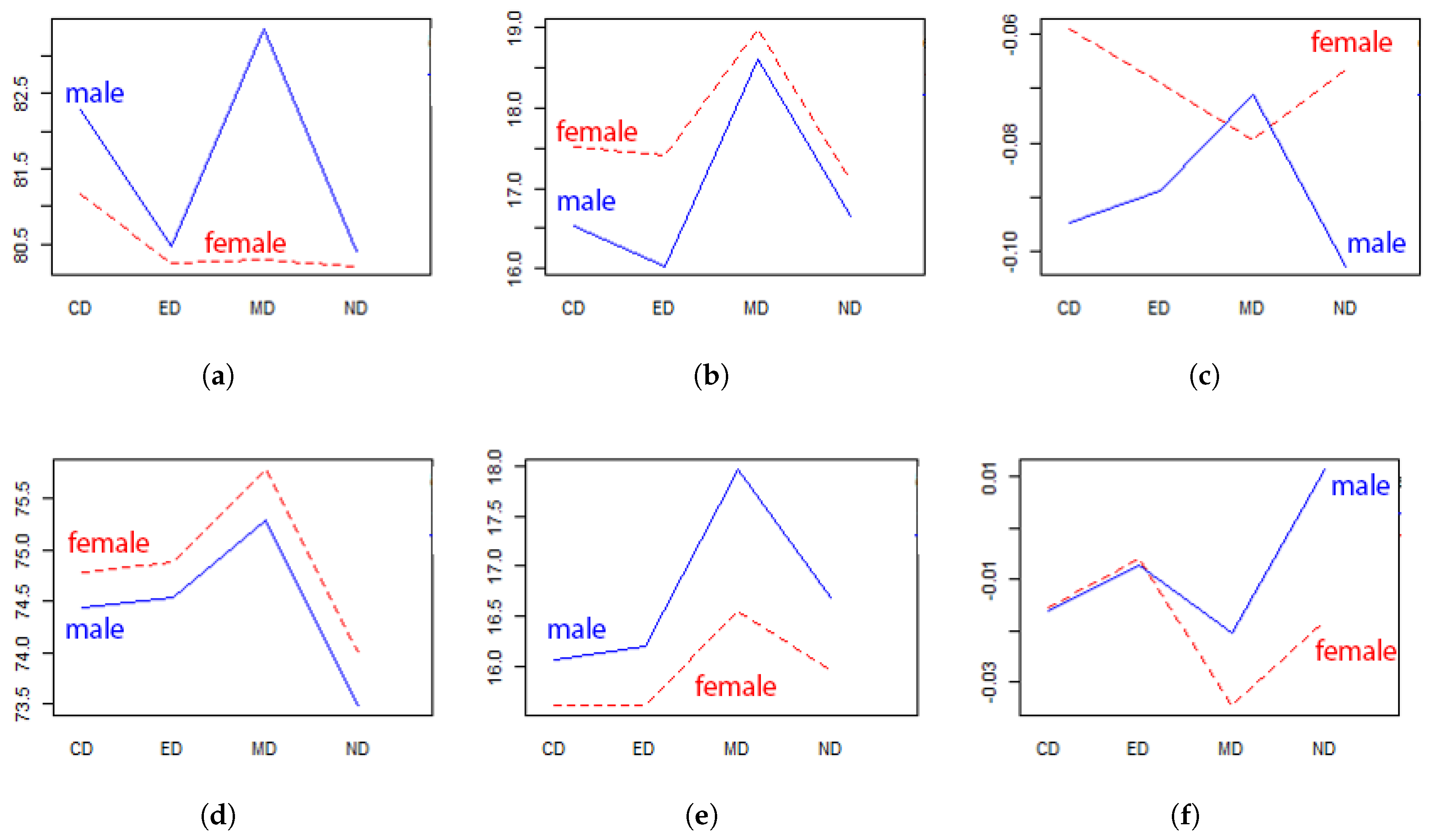
4.1. Advanced Mixed Effect Analysis of Experiment 1
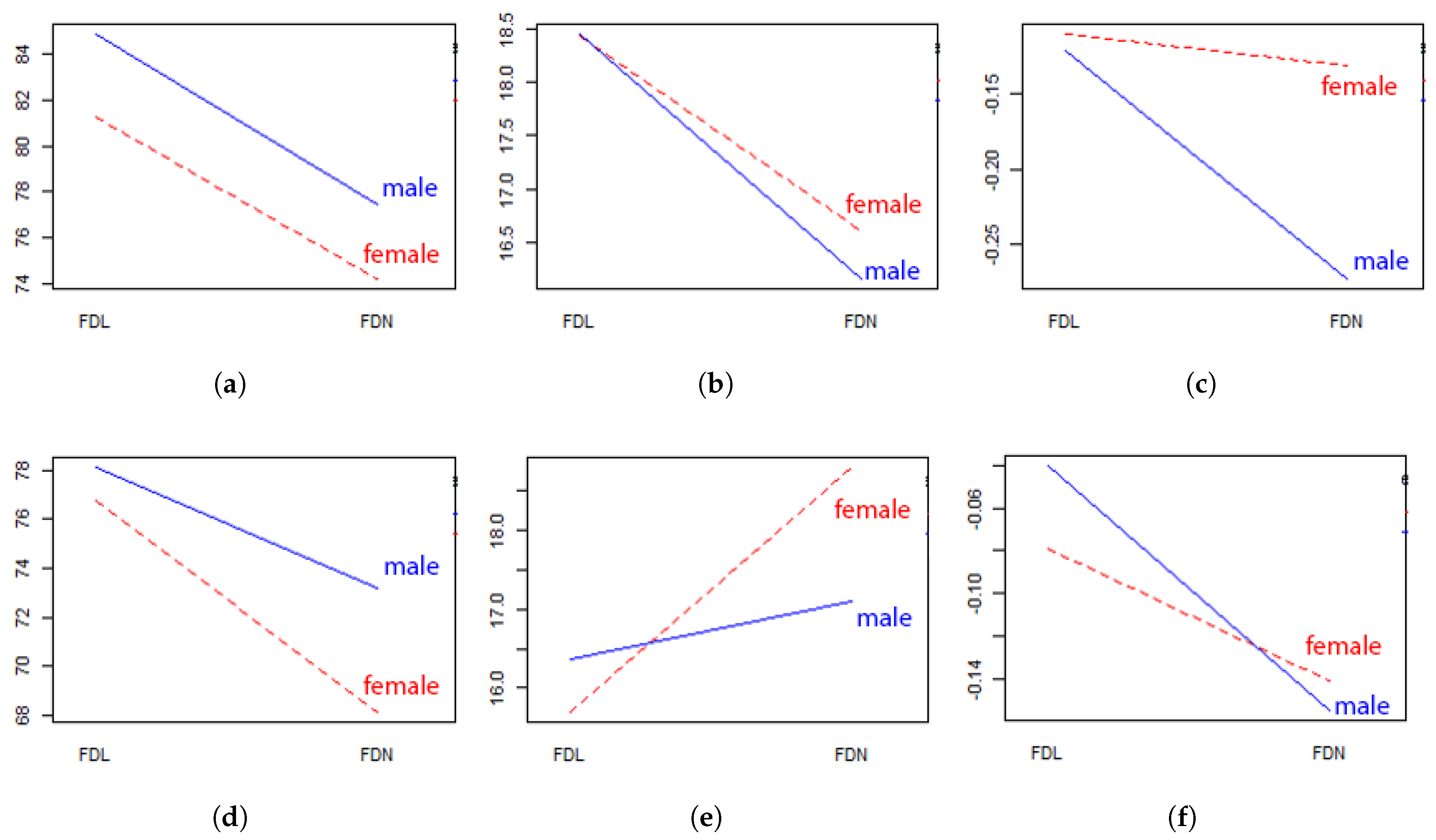
4.2. Advanced Mixed Effect Analysis of Experiment 2
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lipovac, K.; Đerić, M.; Tešić, M.; Andrić, Z.; Marić, B. Mobile phone use while driving—Literary review. Transp. Res. Part F Traffic Psychol. Behav. 2017, 47, 132–142. [Google Scholar] [CrossRef]
- Wikipedia. Restrictions on cEll Phone Use While Driving in the United States. Wikipedia. Available online: https://en.wikipedia.org/wiki/Restrictions_on_cell_phone_use_while_driving_in_the_United_States (accessed on 11 July 2018).
- Sagberg, F.; Selpi; Bianchi Piccinini, G.F.; Engström, J. A review of research on driving styles and road safety. Hum. Factors 2015, 57, 1248–1275. [Google Scholar] [CrossRef] [PubMed]
- Papantoniou, P.; Papadimitriou, E.; Yannis, G. Review of driving performance parameters critical for distracted driving research. Transp. Res. Procedia 2017, 25, 1801–1810. [Google Scholar] [CrossRef]
- Taggart, P.; Gibbons, D. Motor-car driving and the heart rate. Br. Med. J. 1967, 1, 411. [Google Scholar] [CrossRef] [PubMed]
- Casali, J.G.; Wierwille, W.W.; Cordes, R.E. Respiratory measurement: Overview and new instrumentation. Behav. Res. Methods Instrum. 1983, 15, 401–405. [Google Scholar] [CrossRef]
- He, J.; McCarley, J.S.; Kramer, A.F. Lane keeping under cognitive load: Performance changes and mechanisms. Human Factors 2014, 56, 414–426. [Google Scholar] [CrossRef] [PubMed]
- Mui, C. Fasten Your Seatbelts: Google’s Driver-Less Car Is Worth Trillions. Forbes Magazine, 22 January 2013. Available online: https://www.forbes.com/sites/chunkamui/2013/01/22/fasten-your-seatbelts-googles-driverless-car-is-worth-trillions/29b5057679dd (accessed on 12 July 2018).
- Greenblatt, N. Self-driving cars will be ready before our laws are. IEEE Spectr. 2016, 53, 46–51. [Google Scholar] [CrossRef]
- Miller, I.; Garcia, E.; Campbell, M. To drive is human. IEEE Comput. 2006, 39, 52–56. [Google Scholar] [CrossRef]
- Salmon, P.; Reagan, M.; Johnston, I. Human Error and Road Transport; Technical Report; Accident Research Center, Monash University: Victoria, Australia, 2001; Available online: https://www.monash.edu/__data/assets/pdf_file/0010/216946/muarc256.pdf (accessed on 12 July 2018).
- Hendricks, D.L.; Fell, J.C.; Freedman, M.; Page, J.F.; Bellis, E.S.; Scheifflee, T.G.; Hendricks, G.V.S.; Lee, K.C. The Relative Frequency of Unsafe Driving Acts in Serious Traffic Crashes; Summary Technical Report; National Highway Traffic Safety Administration, U.S. Department of Transportation: Washington, DC, USA, 2001. Available online: https://one.nhtsa.gov/people/injury/research/udashortrpt/summary.html (accessed on 10 July 2018).
- U.K. Government. Contributory Factors for Reported Road Accidents. Reported Road Accidents Statisticstables. Available online: https://www.gov.uk/government/statistical-data-sets/ras50-contributory-factors (accessed on 8 July 2018).
- U.S. Department of Transportation. National Motor Vehicle Crash Causation Survey; Summary Technical Report; U.S. Department of Transportation, National Highway Traffic Safety Administration: Washington, DC, USA, 2008. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/811059 (accessed on 11 July 2018).
- Smith, B.W. Human Error as a Cause of Vehicle Crashes. Available online: http://cyberlaw.stanford.edu/blog/2013/12/human-error-cause-vehicle-crashes (accessed on 10 July 2018).
- Green, M. “How long does it take to stop?” Methodological analysis of driver perception-brake times. Transp. Hum. Factors 2000, 2, 195–216. [Google Scholar] [CrossRef]
- Green, M. Perception-reaction time: Is Olson (and sivak) all you need to know? Collis. Int. Compend. Crash Res. 2009, 4, 88–93. [Google Scholar]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; Morgan Kaufmann: Burlington, MA, USA, 1988. [Google Scholar]
- Pearl, J. Causality: Models, Reasoning and Inference; Cambridge Univ Press: Cambridge, UK, 2000; Volume 29. [Google Scholar]
- Geiger, P.; Hofmann, K.; Schölkopf, B. Experimental and Causal View on Information Integration in Autonomous Agents. In Proceedings of the 6th International Workshop on Combinations of Intelligent Methods and Applications, The Hague, The Netherlands, 29 August–2 September 2016; pp. 21–28. Available online: https://www.microsoft.com/en-us/research/publication/experimental-causal-view-information-integration-autonomous-agents/ (accessed on 11 July 2018).
- Pearl, J. UCLA faculty Voice: Artificial Intelligence Can’T Reason Why. UCLA Newsroom, Opinion and Voices. 2008. Available online: http://newsroom.ucla.edu/stories/ucla-faculty-voice:-artificial-intelligence-cant-reason-why (accessed on 9 July 2018).
- Smith, B.W. The Reasonable Self-Driving Car. Available online: http://cyberlaw.stanford.edu/blog/2013/10/reasonable-self-driving-car (accessed on 12 July 2018).
- Anderson, J.M.; Kalra, N.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O.A. Autonomous Vehicle Technology: A Guide for Policymakers; Technical Report; RAND Foundation: Santa Monica, CA, USA, 2016; Available online: https://www.rand.org/content/dam/rand/pubs/research_reports/RR400/RR443-2/RAND_RR443-2.pdf (accessed on 10 July 2018).
- Foundation, R. Autonomous Vehicle Technology: A Guide for Policymakers; Technical Report; Reason Foundation: Los Angeles, CA, USA, 2018; Available online: https://reason.org/wp-content/uploads/2018/03/autonomous-vehicles-guide-for-policymakers.pdf (accessed on 11 July 2018).
- Kastrenakes, J. Jaguar Wants to Monitor Its Drivers’ Brainwaves, Heart Rate, and Breathing. Available online: https://www.theverge.com/2015/6/19/8815419/jaguar-brainwave-heart-rate-breathing-monitors (accessed on 8 July 2018).
- Pavlidis, I.; Dcosta, M.; Taamneh, S.; Manser, M.; Ferris, T.; Wunderlich, R.; Akleman, E.; Tsiamyrtzis, P. Dissecting driver behaviors under cognitive, emotional, sensorimotor, and mixed stressors. Sci. Rep. 2016, 6, 25651. [Google Scholar] [CrossRef] [PubMed]
- Hart, S.G.; Wickens, C.D. Workload assessment and prediction. In Manprint; Springer: Dordrecht, The Netherlands, 1990; pp. 257–296. [Google Scholar]
- Hart, S.G. NASA-task load index (NASA-TLX); 20 years later. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2006, 50, 904–908. [Google Scholar] [CrossRef]
- Stotland, E.; Pendleton, M. Workload, stress, and strain among police officers. Behav. Med. 1989, 15, 5–17. [Google Scholar] [CrossRef] [PubMed]
- Spector, P.E.; Jex, S.M. Development of four self-report measures of job stressors and strain: Interpersonal conflict at work scale, organizational constraints scale, quantitative workload inventory, and physical symptoms inventory. J. Occup. Health Psychol. 1998, 3, 356. [Google Scholar] [CrossRef] [PubMed]
- Gopher, D.; Donchin, E. Workload-An examination of the concept. In Handbook of Perception and Human Performance, Vol II, Cognitive Processes and Performance; Wiley & Sons: New York, NY, USA, 1986; pp. 1–49. [Google Scholar]
- Jo, S.; Myung, R.; Yoon, D. Quantitative prediction of mental workload with the ACT-R cognitive architecture. Int. J. Ind. Ergon. 2012, 42, 359–370. [Google Scholar] [CrossRef]
- Dcosta, M. Simulator Study I: A Multimodal Dataset for Various Forms of Distracted Driving. Available online: https://osf.io/c42cn/ (accessed on 11 July 2018).
- Taamneh, S.; Tsiamyrtzis, P.; Dcosta, M.; Buddharaju, P.; Khatri, A.; Manser, M.; Ferris, T.; Wunderlich, R.; Pavlidis, I. A multimodal dataset for various forms of distracted driving. Sci. Data 2017, 4, 170110. [Google Scholar] [CrossRef] [PubMed]
- RCoreTeam. R Project. Available online: https://www.r-project.org/ (accessed on 5 July 2018).
- Littlewort, G.; Whitehill, J.; Wu, T.; Fasel, I.; Frank, M.; Movellan, J.; Bartlett, M. The computer expression recognition toolbox (CERT). In Proceedings of the 2011 IEEE International Conference on Automatic Face & Gesture Recognition and Workshops (FG 2011), 21–25 March 2011, Santa Barbara, CA, USA; pp. 298–305.
- Rokach, L.; Maimon, O. Clustering methods. In Data Mining and Knowledge Discovery Handbook; Springer: New York, NY, USA, 2005; pp. 321–352. [Google Scholar]
- Pochedly, J.T.; Widen, S.C.; Russell, J.A. What emotion does the “facial expression of disgust” express? Emotion 2012, 12, 1315. [Google Scholar] [CrossRef] [PubMed]
- Bennani, Y.; Benabdeslem, K. Dendogram-based SVM for multi-class classification. J. Comput. Inf. Technol. 2006, 14, 283–289. [Google Scholar]
- Bessler, D.A.; Akleman, D.G. Farm prices, retail prices, and directed graphs: Results for pork and beef. Am. J. Agric. Econ. 1998, 80, 1144–1149. [Google Scholar] [CrossRef]
- Leary, M.R. How the self became involved in affective experience: Three sources of self-reflective emotions. In The Self-Conscious Emotions: Theory and Research; Guilford Press: New York, NY, USA, 2007; pp. 38–52. [Google Scholar]
- Tracy, J.L.; Robins, R.W.; Tangney, J.P. The Self-Conscious Emotions: Theory and Research; Guilford Press: New York, NY, USA, 2007. [Google Scholar]
- Pearl, J. Causal diagrams for empirical research. Biometrika 1995, 82, 669–688. [Google Scholar] [CrossRef]
- Dunning, D. The Dunning–Kruger effect: On being ignorant of one’s own ignorance. In Advances in Experimental Social Psychology; Elsevier: Amsterdam, The Netherlands, 2011; Volume 44, pp. 247–296. [Google Scholar]
- Kruger, J.; Dunning, D. Unskilled and unaware of it: How difficulties in recognizing one’s own incompetence lead to inflated self-assessments. J. Personal. Soc. Psychol. 1999, 77, 1121. [Google Scholar] [CrossRef]
- Klauer, S.G.; Guo, F.; Simons-Morton, B.G.; Ouimet, M.C.; Lee, S.E.; Dingus, T.A. Distracted driving and risk of road crashes among novice and experienced drivers. N. Engl. J. Med. 2014, 370, 54–59. [Google Scholar] [CrossRef] [PubMed]
- Sümer, N. Personality and behavioral predictors of traffic accidents: Testing a contextual mediated model. Accid. Anal. Prev. 2003, 35, 949–964. [Google Scholar] [CrossRef]
- Nabi, H.; Consoli, S.M.; Chastang, J.F.; Chiron, M.; Lafont, S.; Lagarde, E. Type A behavior pattern, risky driving behaviors, and serious road traffic accidents: A prospective study of the GAZEL cohort. Am. J. Epidemiol. 2005, 161, 864–870. [Google Scholar] [CrossRef] [PubMed]
- Perry, A.R.; Baldwin, D.A. Further evidence of associations of type A personality scores and driving-related attitudes and behaviors. Percept. Motor Skills 2000, 91, 147–154. [Google Scholar] [CrossRef] [PubMed]








© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gomez, J.P.; Akleman, D.; Akleman, E.; Pavlidis, I. Causality Effects of Interventions and Stressors on Driving Behaviors under Typical Conditions. Mathematics 2018, 6, 139. https://doi.org/10.3390/math6080139
Gomez JP, Akleman D, Akleman E, Pavlidis I. Causality Effects of Interventions and Stressors on Driving Behaviors under Typical Conditions. Mathematics. 2018; 6(8):139. https://doi.org/10.3390/math6080139
Chicago/Turabian StyleGomez, Juan Pablo, Derya Akleman, Ergun Akleman, and Ioannis Pavlidis. 2018. "Causality Effects of Interventions and Stressors on Driving Behaviors under Typical Conditions" Mathematics 6, no. 8: 139. https://doi.org/10.3390/math6080139
APA StyleGomez, J. P., Akleman, D., Akleman, E., & Pavlidis, I. (2018). Causality Effects of Interventions and Stressors on Driving Behaviors under Typical Conditions. Mathematics, 6(8), 139. https://doi.org/10.3390/math6080139