
A Multi-Objective Pigeon-Inspired Optimization Algorithm for Community Detection in Complex Networks

Abstract
1. Introduction
- (1)
- We utilize the excellent optimization capabilities of the pigeon-inspired optimization algorithm and combine it with a multi-objective optimization strategy to form a novel algorithm for community detection problems in a complex network.
- (2)
- We have re-discretized the pigeon-inspired optimization algorithm for the community detection problem. The velocity and position update formulas applicable to the community structure representation are redefined.
- (3)
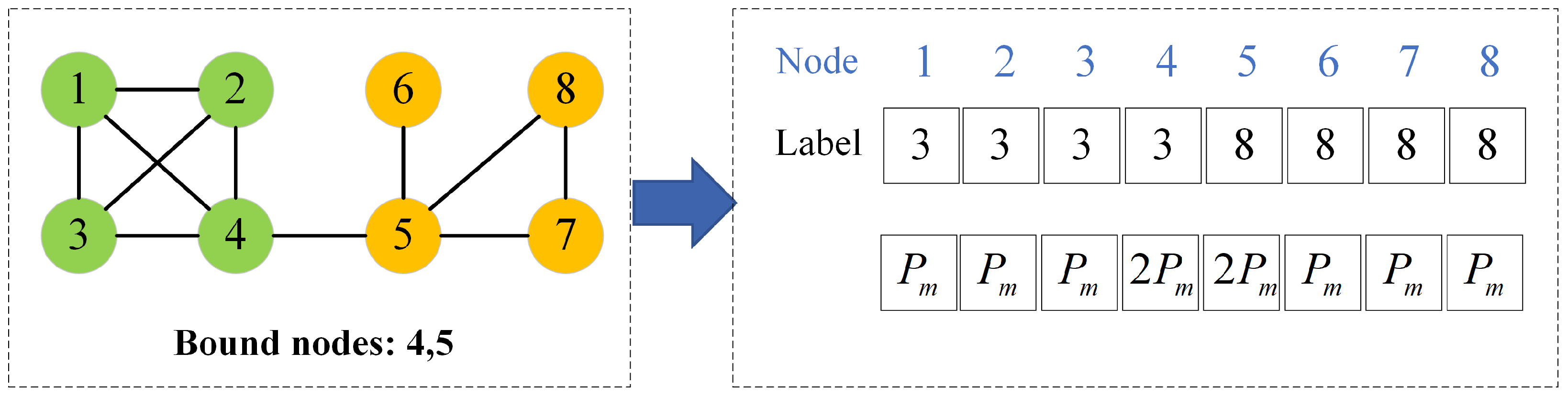
- We provide the definition of a boundary node. The misclassification of boundary nodes is a key factor affecting community detection. The corresponding variation strategies are proposed for boundary nodes and non-boundary nodes to improve the accuracy of community partitioning.
2. Background and Related Works
2.1. Community Definition
2.2. Multi-Objective Optimization
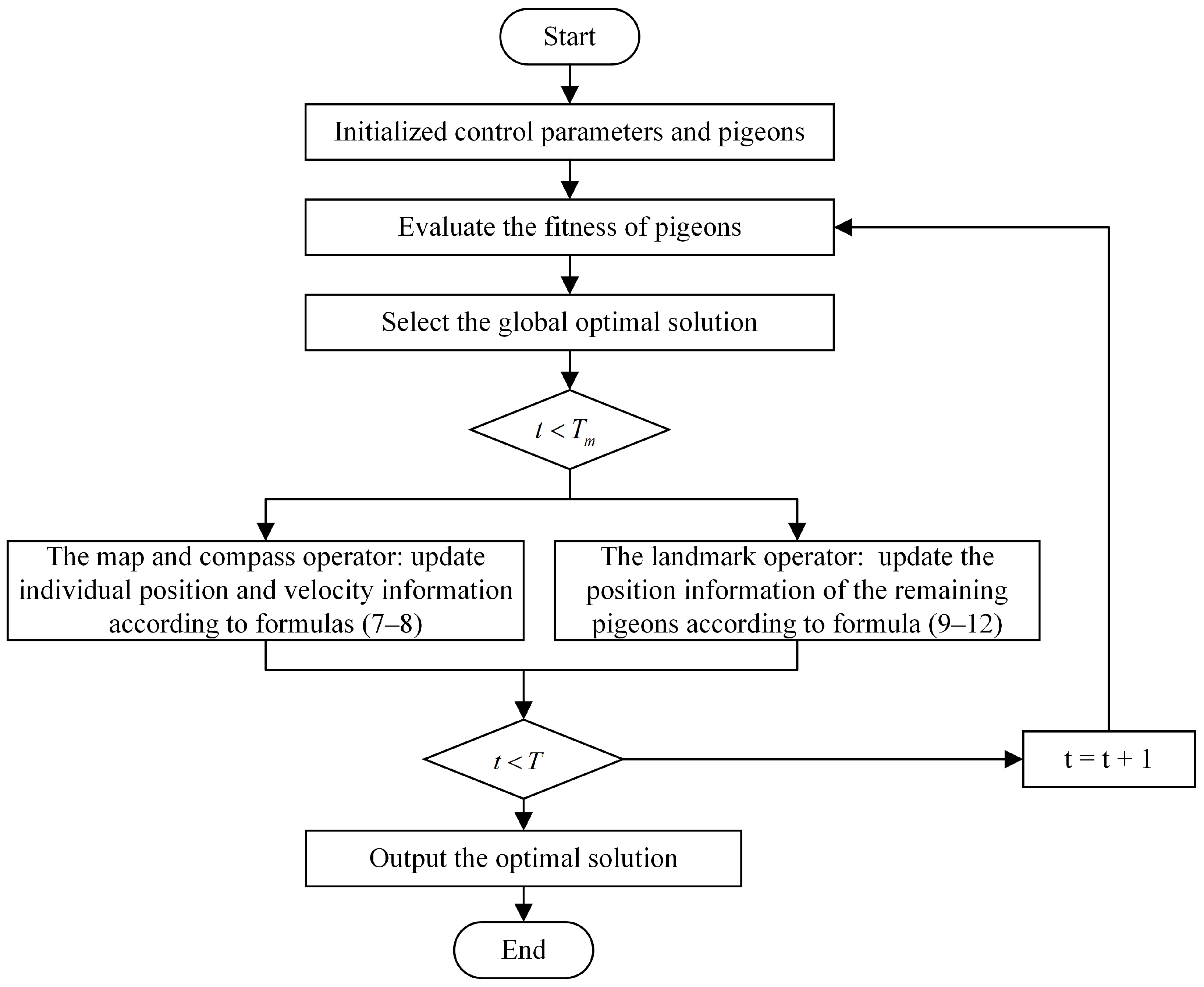
2.3. The Pigeon-Inspired Optimization Algorithm
3. Proposed Method
3.1. Solution Representation and Initialization
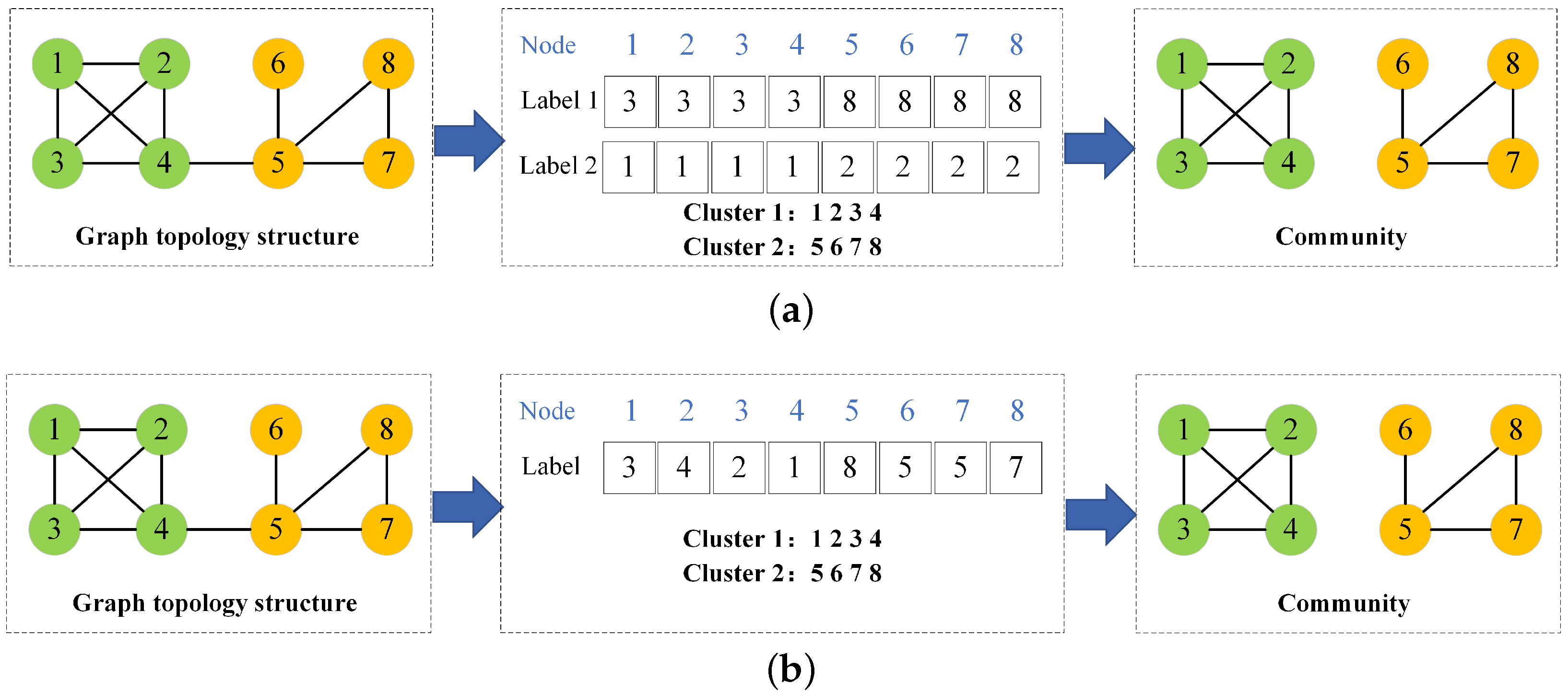
3.1.1. Location Representation
| Algorithm 1 Location Representation |
begin
|
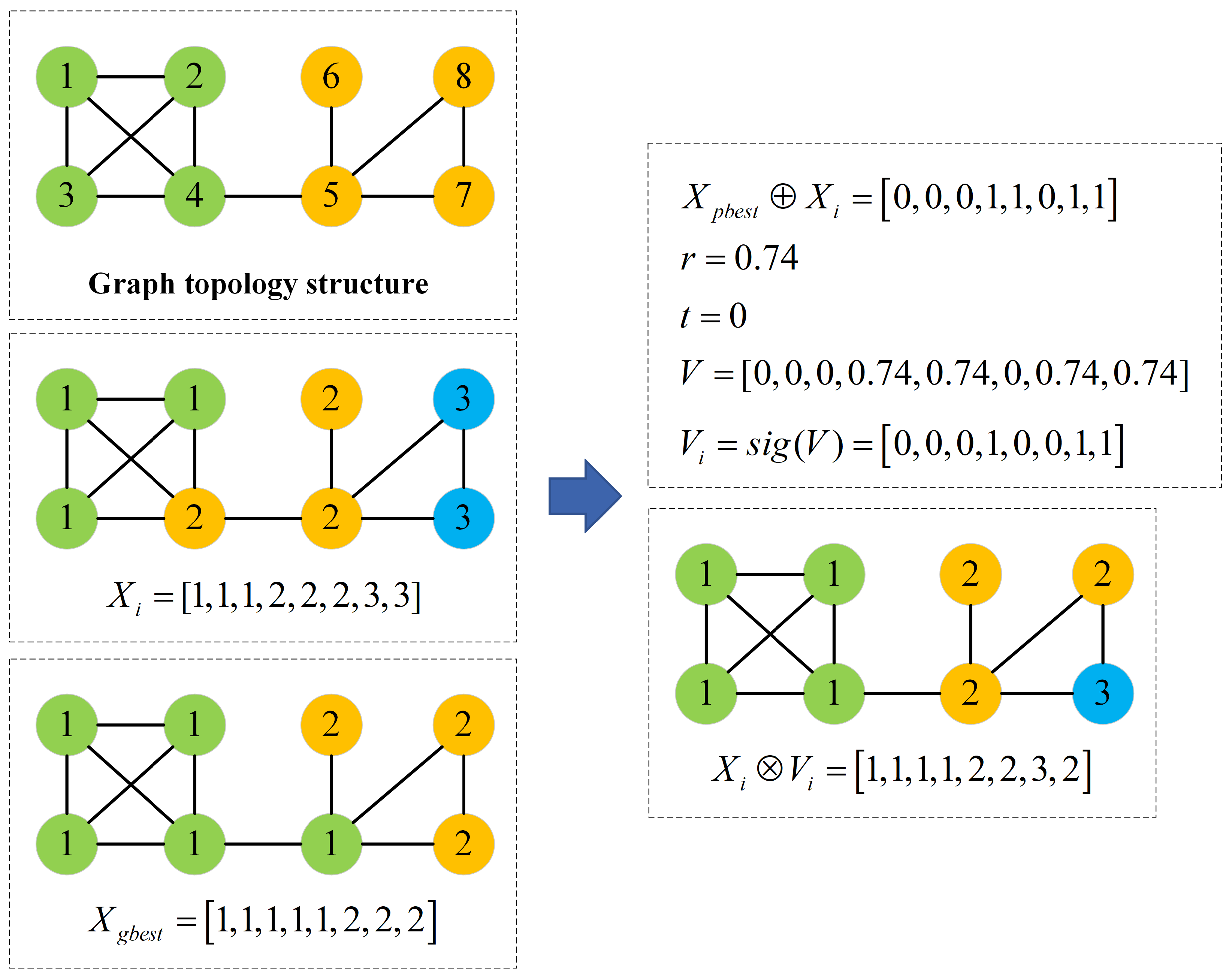
3.1.2. Velocity Representation
3.2. Fitness Computation
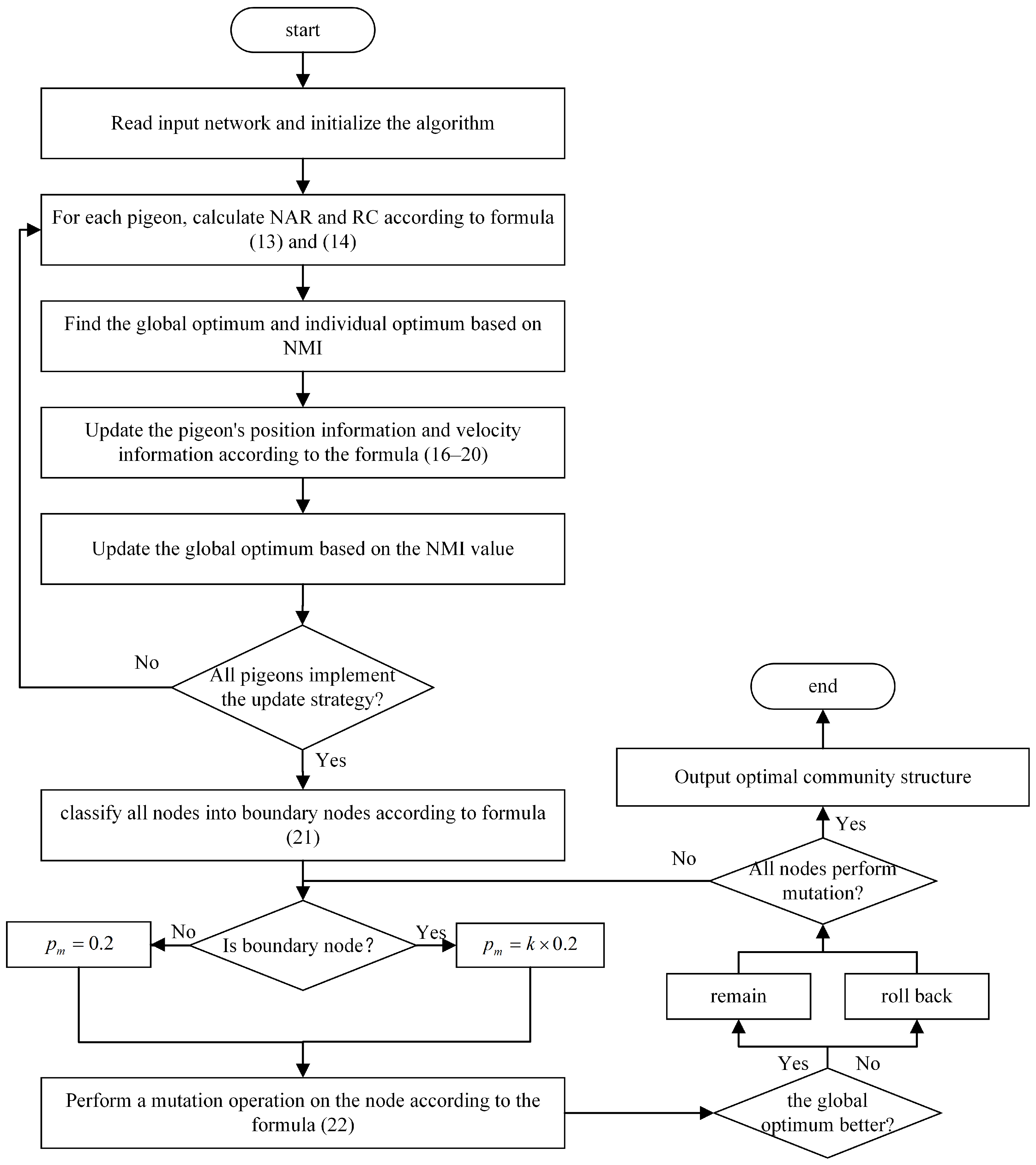
3.3. Search Strategy
| Algorithm 2 Mutation |
begin
|
4. Experiment
4.1. Parameter Setting
4.2. Evaluation Metric
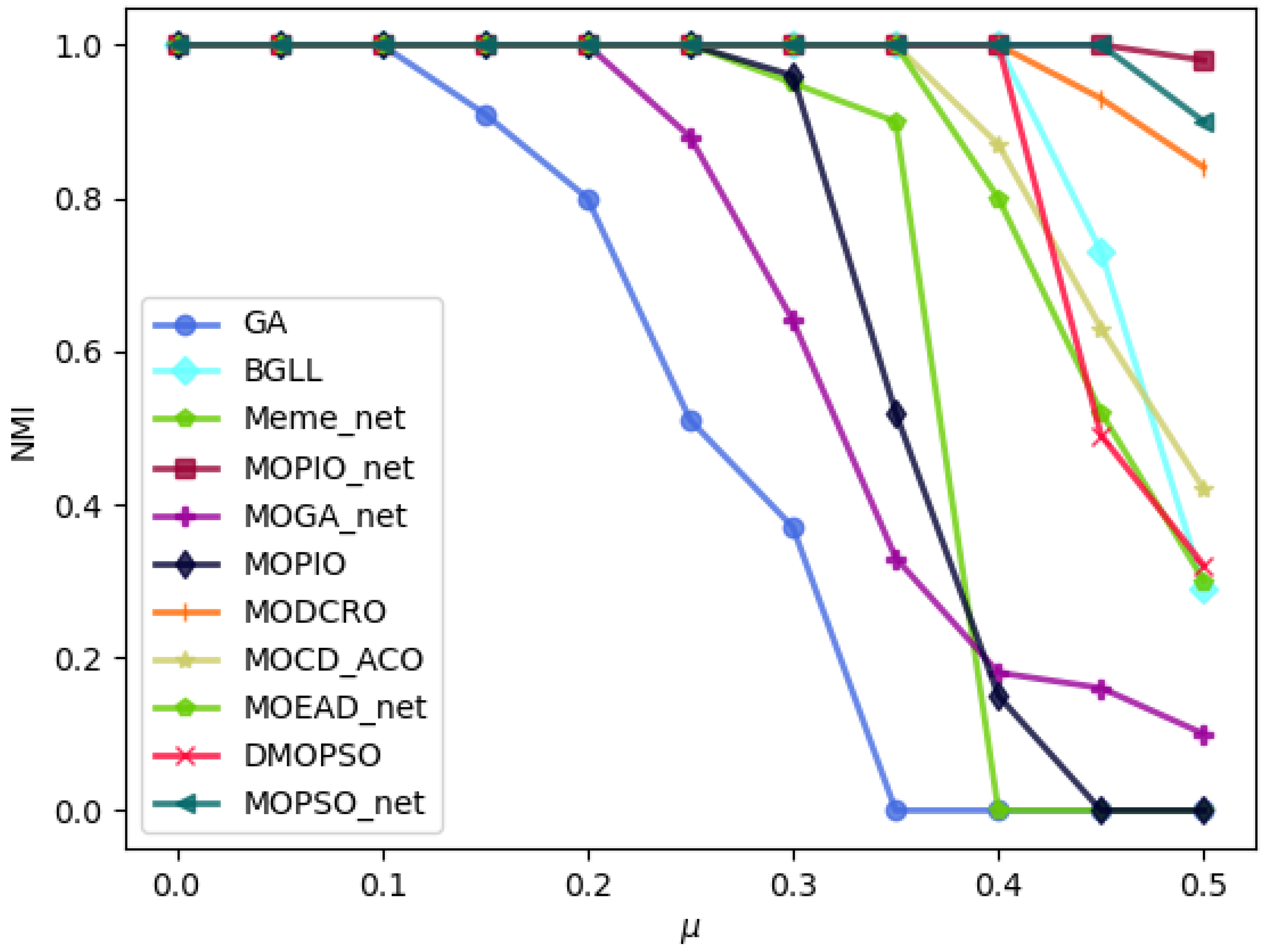
4.3. Experimental Results of the GN Extended Benchmark Network
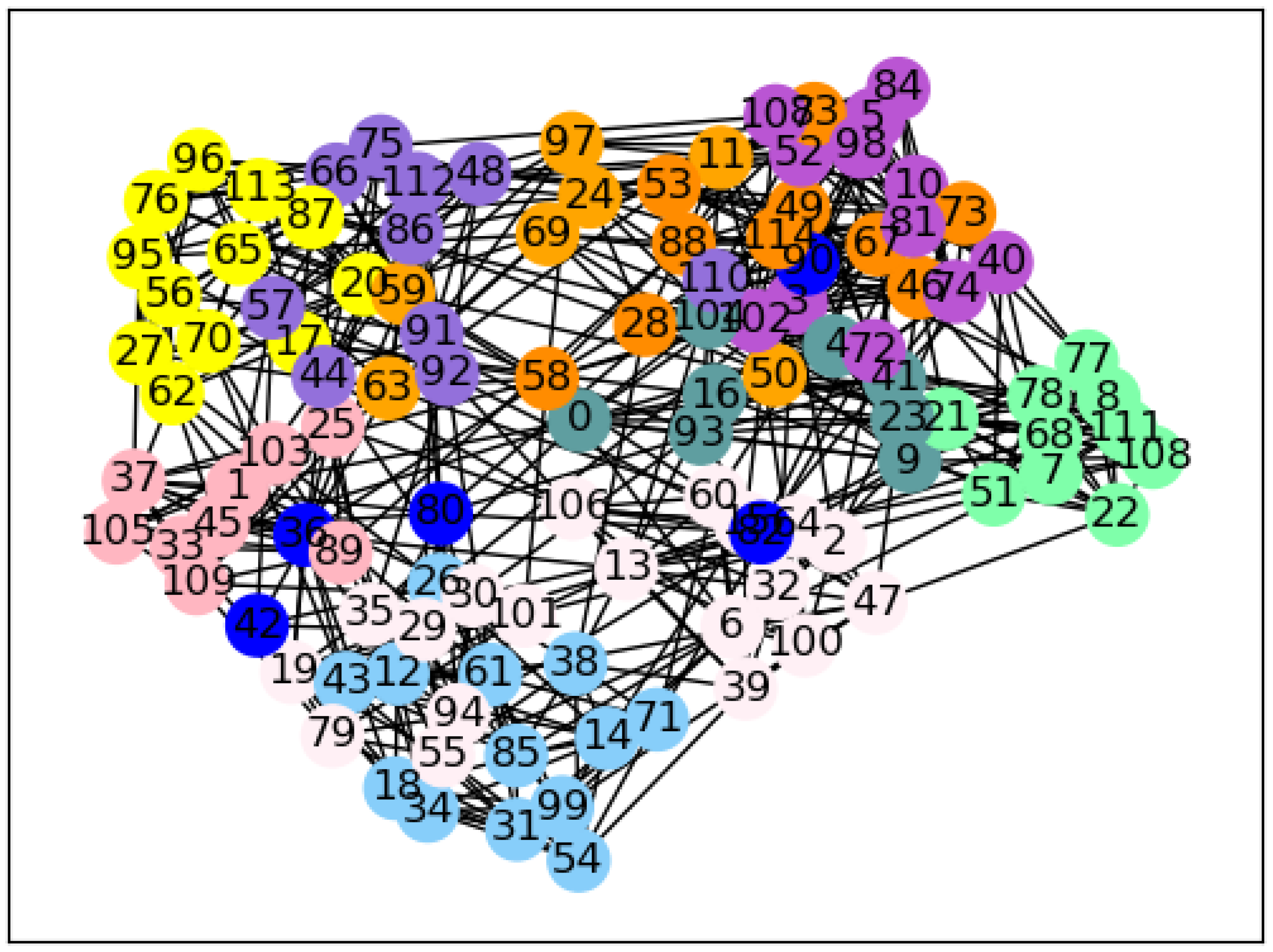
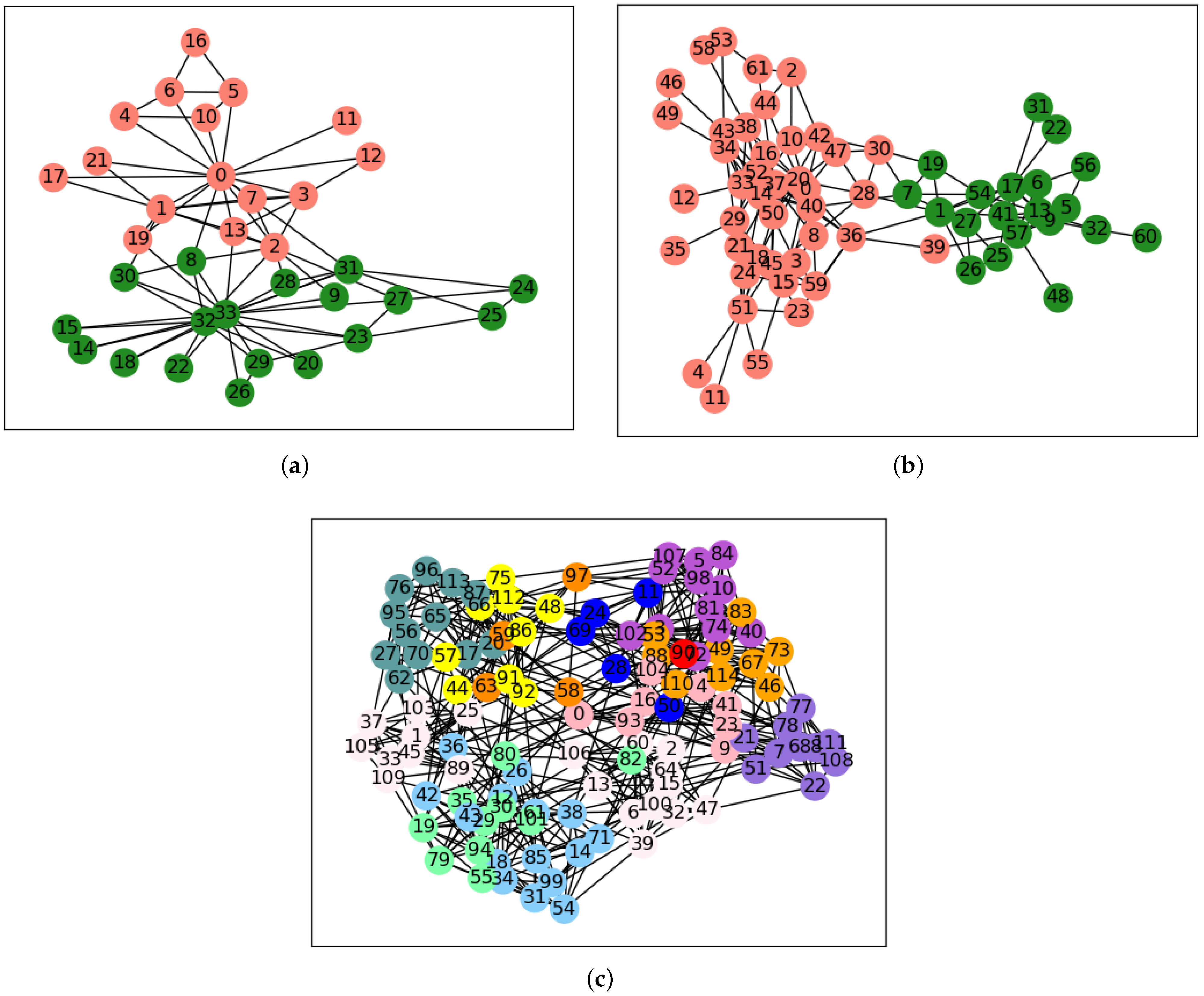
4.4. Experimental Results on the Real Networks
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bennett, L.; Kittas, A.; Muirhead, G.; Papageorgiou, L.G.; Tsoka, S. Detection of Composite Communities in Multiplex Biological Networks. Sci. Rep. 2015, 5, 10345. [Google Scholar] [CrossRef]
- Tamura, K.; Kobayashi, Y.; Ihara, Y. Evolution of individual versus social learning on social networks. J. R. Soc. Interface 2015, 12, 20141285. [Google Scholar] [CrossRef]
- Harakawa, R.; Ogawa, T.; Haseyama, M. Accurate and Efficient Extraction of Hierarchical Structure of Web Communities for Web Video Retrieval. ITE Trans. Media Technol. Appl. 2015, 4, 49–59. [Google Scholar]
- Khanfor, A.; Ghazzai, H.; Yang, Y.; Massoud, Y. Application of Community Detection Algorithms on Social Internet-of-things Networks. In Proceedings of the 31st International Conference on Microelectronics (IEEE ICM 2019), Cairo, Egypt, 15–18 December 2019; pp. 94–97. [Google Scholar]
- Rostami, M.; Berahmand, K.; Forouzandeh, S. A novel community detection based genetic algorithm for feature selection. J. Big Data 2021, 8, 2. [Google Scholar] [CrossRef]
- Moradi, P.; Ahmadian, S.; Akhlaghian, F. An effective trust-based recommendation method using a novel graph clustering algorithm. Phys. A-Stat. Mech. Its Appl. 2015, 436, 462–481. [Google Scholar] [CrossRef]
- Rezaeimehr, F.; Moradi, P.; Ahmadian, S.; Qader, N.N.; Jalili, M. TCARS: Time- and Community-Aware Recommendation System. Future Gener. Comput. Syst. Int. J. Escience 2018, 78, 419–429. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Li, Q.; Jin, F.; Xiong, W. Link prediction based on hyperbolic mapping with community structure for complex networks. Phys. A-Stat. Mech. Its Appl. 2016, 450, 609–623. [Google Scholar] [CrossRef]
- Deng, X.; Wen, Y.; Chen, Y. Highly efficient epidemic spreading model based LPA threshold community detection method. Neurocomputing 2016, 210, 3–12. [Google Scholar] [CrossRef]
- Wang, S.; Gong, M.; Liu, W.; Wu, Y. Preventing epidemic spreading in networks by community detection and memetic algorithm. Appl. Soft Comput. 2020, 89, 106118. [Google Scholar] [CrossRef]
- Girvan, M.; Newman, M.E.J. Community structure in social and biological networks. Proc. Natl. Acad. Sci. USA 2002, 99, 7821–7826. [Google Scholar] [CrossRef]
- Newman, M. Fast algorithm for detecting community structure in networks. Phys. Rev. E 2004, 69, 066133. [Google Scholar] [CrossRef]
- Lancichinetti, A.; Fortunato, S.; Kertesz, J. Detecting the overlapping and hierarchical community structure in complex networks. New J. Phys. 2009, 11, 033015. [Google Scholar] [CrossRef]
- Pizzuti, C. GA-Net: A Genetic Algorithm for Community Detection in Social Networks. In Parallel Problem Solving from Nature—PPSN X, Proceedings of the 10th International Conference on Parallel Problem Solving from Nature, Dortmund, Germany, 13–17 September 2008; Rudolph, G., Jansen, T., Lucas, S., Poloni, C., Beume, N., Eds.; Lecture Notes in Computer Science Series; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5199, pp. 1081–1090. [Google Scholar]
- Li, J.; Song, Y. Community detection in complex networks using extended compact genetic algorithm. Soft Comput. 2013, 17, 925–937. [Google Scholar] [CrossRef]
- Gong, M.; Fu, B.; Jiao, L.; Du, H. Memetic algorithm for community detection in networks. Phys. Rev. E 2011, 84, 056101. [Google Scholar] [CrossRef]
- Fortunato, S.; Barthelemy, M. Resolution limit in community detection. Proc. Natl. Acad. Sci. USA 2007, 104, 36–41. [Google Scholar] [CrossRef]
- Tian, Y.; Yang, S.; Zhang, X. An Evolutionary Multiobjective Optimization Based Fuzzy Method for Overlapping Community Detection. IEEE Trans. Fuzzy Syst. 2020, 28, 2841–2855. [Google Scholar] [CrossRef]
- Pizzuti, C. A Multiobjective Genetic Algorithm to Find Communities in Complex Networks. IEEE Trans. Evol. Comput. 2012, 16, 418–430. [Google Scholar] [CrossRef]
- Rahimi, S.; Abdollahpouri, A.; Moradi, P. A multi-objective particle swarm optimization algorithm for community detection in complex networks. Swarm Evol. Comput. 2018, 39, 297–309. [Google Scholar] [CrossRef]
- Messaoudi, I.; Kamel, N. A multi-objective bat algorithm for community detection on dynamic social networks. Appl. Intell. 2019, 49, 2119–2136. [Google Scholar] [CrossRef]
- Li, Q.; Cao, Z.; Ding, W.; Li, Q. A multi-objective adaptive evolutionary algorithm to extract communities in networks. Swarm Evol. Comput. 2020, 52, 100629. [Google Scholar] [CrossRef]
- Chen, D.; Zou, F.; Lu, R.; Yu, L.; Li, Z.; Wang, J. Multi-objective optimization of community detection using discrete teaching-learning-based optimization with decomposition. Inf. Sci. 2016, 369, 402–418. [Google Scholar] [CrossRef]
- Ji, P.; Zhang, S.; Zhou, Z. A decomposition-based ant colony optimization algorithm for the multi-objective community detection. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 173–188. [Google Scholar] [CrossRef]
- Li, H.; Gan, W. A Decomposition-Based Multiobjective Chemical Reaction Optimization Algorithm for Community Detection in Complex Networks. Int. J. Comput. Intell. Syst. 2020, 13, 524–537. [Google Scholar] [CrossRef]
- Perez-Pelo, S.; Sanchez-Oro, J.; Gonzalez-Pardo, A.; Duarte, A. A fast variable neighborhood search approach for multi-objective community detection. Appl. Soft Comput. 2021, 112, 107838. [Google Scholar] [CrossRef]
- Ma, H.; Yang, H.; Zhou, K.; Zhang, L.; Zhang, X. A local-to-global scheme-based multi-objective evolutionary algorithm for overlapping community detection on large-scale complex networks. Neural Comput. Appl. 2021, 33, 5135–5149. [Google Scholar] [CrossRef]
- Jokar, E.; Mosleh, M.; Kheyrandish, M. GWBM: An algorithm based on grey wolf optimization and balanced modularity for community discovery in social networks. J. Supercomput. 2022, 78, 7354–7377. [Google Scholar] [CrossRef]
- Liu, X.; Du, Y.; Jiang, M.; Zeng, X. Multiobjective Particle Swarm Optimization Based on Network Embedding for Complex Network Community Detection. IEEE Trans. Comput. Soc. Syst. 2020, 7, 437–449. [Google Scholar] [CrossRef]
- Pizzuti, C.; Socievole, A. Multiobjective Optimization and Local Merge for Clustering Attributed Graphs. IEEE Trans. Cybern. 2020, 50, 4997–5009. [Google Scholar] [CrossRef]
- Besharatnia, F.; Talebpour, A.; Aliakbary, S. An Improved Grey Wolves Optimization Algorithm for Dynamic Community Detection and Data Clustering. Appl. Artif. Intell. 2022, 36, 2012000. [Google Scholar] [CrossRef]
- Fortunato, S. Community detection in graphs. Phys. Rep. 2010, 486, 75–174. [Google Scholar] [CrossRef]
- Radicchi, F.; Castellano, C.; Cecconi, F.; Loreto, V.; Parisi, D. Defining and identifying communities in networks. Proc. Natl. Acad. Sci. USA 2004, 101, 2658–2663. [Google Scholar] [CrossRef] [PubMed]
- Leung, M.F.; Wang, J. A Collaborative Neurodynamic Approach to Multiobjective Optimization. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5738–5748. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Zou, J.; Yang, S.; Zheng, J.; Liu, Y. A Fuzzy Decision Variables Framework for Large-Scale Multiobjective Optimization. IEEE Trans. Evol. Comput. 2023, 27, 445–459. [Google Scholar] [CrossRef]
- Liu, S.; Li, J.; Lin, Q.; Tian, Y.; Tan, K.C. Learning to Accelerate Evolutionary Search for Large-Scale Multiobjective Optimization. IEEE Trans. Evol. Comput. 2023, 27, 67–81. [Google Scholar] [CrossRef]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Shang, J.; Li, Y.; Sun, Y.; Li, F.; Zhang, Y.; Liu, J.X. MOPIO: A Multi-Objective Pigeon-Inspired Optimization Algorithm for Community Detection. Symmetry 2021, 13, 49. [Google Scholar] [CrossRef]
- Gong, M.; Cai, Q.; Chen, X.; Ma, L. Complex Network Clustering by Multiobjective Discrete Particle Swarm Optimization Based on Decomposition. IEEE Trans. Evol. Comput. 2014, 18, 82–97. [Google Scholar] [CrossRef]
- Angelini, L.; Boccaletti, S.; Marinazzo, D.; Pellicoro, M.; Stramaglia, S. Identification of network modules by optimization of ratio association. Chaos 2007, 17, 023114. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.C.; Cheng, C.K. Ratio cut partitioning for hierarchical designs. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 1991, 10, 911–921. [Google Scholar] [CrossRef]
- Pizzuti, C. Evolutionary Computation for Community Detection in Networks: A Review. IEEE Trans. Evol. Comput. 2018, 22, 464–483. [Google Scholar] [CrossRef]
- Blondel, V.D.; Guillaume, J.L.; Lambiotte, R.; Lefebvre, E. Fast unfolding of communities in large networks. J. Stat. Mech.-Theory Exp. 2008, 2008, P10008. [Google Scholar] [CrossRef]
- Gong, M.; Ma, L.; Zhang, Q.; Jiao, L. Community detection in networks by using multiobjective evolutionary algorithm with decomposition. Phys. A-Stat. Mech. Its Appl. 2012, 391, 4050–4060. [Google Scholar] [CrossRef]
- Zachary, W.W. An Information Flow Model for Conflict and Fission in Small Groups. J. Anthropol. Res. 1977, 33, 452–473. [Google Scholar] [CrossRef]
- Lusseau, D.; Schneider, K.; Boisseau, O.; Haase, P.A.; Slooten, E.; Dawson, S.M. The bottlenose dolphin community of Doubtful Sound features a large proportion of long-lasting associations. Behav. Ecol. Sociobiol. 2003, 54, 396–405. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Description | In Ref |
|---|---|---|
| GA-Net | Single objective optimization method Fitness function: Modularity | [14] |
| BGLL | Single objective optimization method Fitness function: Modularity | [43] |
| Meme-Net | Single objective optimization method Fitness function: module density mass function. | [16] |
| MOGA-Net | Multi-objective optimization method Fitness function: Community score, community fitness | [19] |
| MOEA/D-Net | Multi-objective optimization method Fitness function: RC, NRA | [44] |
| MOPSO-Net | Multi-objective optimization method Fitness function: Kernel K-Means, RC | [20] |
| MODPSO | Multi-objective optimization method Fitness function: Kernel K-Means, RC | [39] |
| MOPIO | Multi-objective optimization method Fitness function: NRA, RC | [38] |
| MOCD-ACO | Multi-objective optimization method Fitness function: NRA, RC | [45] |
| MODCRO | Multi-objective optimization method Fitness function: Kernel K-Means, RC | [25] |
| Networks | Number of Nodes | Number of Edges | Number of Communities |
|---|---|---|---|
| Zackary’s karate club | 34 | 78 | 2 |
| Dolphin network | 62 | 159 | 2 |
| American College Football Network | 115 | 613 | 12 |
| Karate | Dolphin | Football | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Method | |||||||||||
| GA-Net | 1 | 0.6654 | 0.3221 | 0.6267 | 0.6264 | 0.0001 | 0.9104 | 0.8977 | 0.0253 | ||
| BGLL | 1 | 0.7076 | 0.2912 | 0.6956 | 0.5144 | 0.1451 | 0.8358 | 08358 | 0 | ||
| Meme-Net | 1 | 0.8644 | 0.1221 | 1 | 0.7889 | 0.3103 | 0.8616 | 0.7669 | 0.0897 | ||
| MOGA-Net | 1 | 1 | 0 | 1 | 0.9389 | 0.0057 | 0.8045 | 0.7950 | 0.0015 | ||
| MOEA/D-Net | 1 | 1 | 0 | 1 | 1 | 0 | 0.9296 | 0.9294 | 0.0001 | ||
| MOPSO-Net | 1 | 1 | 0 | 1 | 1 | 0 | 0.9325 | 0.9316 | 0.0004 | ||
| MODPSO | 1 | 1 | 0 | 1 | 1 | 0 | 0.9298 | 0.9278 | 0.0008 | ||
| MOPIO | 1 | 0.860 | 0.2242 | 1 | 0.8022 | 0.2442 | 0.8160 | 0.7542 | 0.0606 | ||
| MOCD-ACO | 1 | 1 | 0 | 1 | 1 | 0 | 0.9374 | 0.9286 | 0.0117 | ||
| MODCRO | 1 | 0.9673 | 0.0197 | 1 | 0.9495 | 0.0377 | 0.9000 | 0.8674 | 0.0412 | ||
| MOPIO-Net | 1 | 1 | 0 | 1 | 1 | 0 | 0.9423 | 0.9336 | 0.0091 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Guo, X.; Zhou, D.; Zhang, J. A Multi-Objective Pigeon-Inspired Optimization Algorithm for Community Detection in Complex Networks. Mathematics 2024, 12, 1486. https://doi.org/10.3390/math12101486
Yu L, Guo X, Zhou D, Zhang J. A Multi-Objective Pigeon-Inspired Optimization Algorithm for Community Detection in Complex Networks. Mathematics. 2024; 12(10):1486. https://doi.org/10.3390/math12101486
Chicago/Turabian StyleYu, Lin, Xiaodan Guo, Dongdong Zhou, and Jie Zhang. 2024. "A Multi-Objective Pigeon-Inspired Optimization Algorithm for Community Detection in Complex Networks" Mathematics 12, no. 10: 1486. https://doi.org/10.3390/math12101486
APA StyleYu, L., Guo, X., Zhou, D., & Zhang, J. (2024). A Multi-Objective Pigeon-Inspired Optimization Algorithm for Community Detection in Complex Networks. Mathematics, 12(10), 1486. https://doi.org/10.3390/math12101486