1. Introduction
The implementation of electric propulsion (EP) thrusters on spacecraft is largely driven by weight reductions over traditional chemical propulsion thrusters. EP has a distinct payload reduction advantage over chemical propulsion and offers increased operational life, in excess of 10,000 h, and high specific impulse
Isp, of 1500–4000 s, but relatively low thrust values of around 30–230 mN [
1], which is useful for long range missions and small attitude adjustments for satellites [
2]. EP offers improved specific impulse and operational lifetimes over chemical thrusters with a significant reduction in the amount of propellant required. The reduction in propellant due to reduced fuel consumption and low system mass leads to a significant reduction in launch costs, making this technology desirable. Keller et al. [
3] has identified several upcoming satellite missions that require smaller EP thrusters for increased precision attitude and control.
The gridded ion thruster (GIT) and the Hall effect thruster (HET) are high efficiency flight tested examples of EP. Both of these propulsion concepts are well understood and have values of
Isp ranges from 1500 to 6000 s [
4]. Both of these designs provide great performance but also come with drawbacks such as system complexity and thruster erosion from impinging ions on grids or channel walls [
5], which limits their operational lifetimes. First developed by Thales Electron Devices in 1999 as the Highly Efficient Multi-stage Plasma Thruster (HEMP-T) [
3], based on travelling wave tube technology, the Cusped Field Thruster (CFT) concept has a simplified design and demonstrates improved performance characteristics over GIT and HET, with
Isp in the range of 2000–3000 s, and an estimated minimum operational lifetime of over 16,000 h [
6]. Since the first HEMP-T patent by Thales Electron Devices (TED) in 1999, similar thruster designs have been developed and tested by different institutions around the world; MIT’s Diverging Cusped-Field Thruster (DCFT) [
7], Stanford’s DCFT [
8] and the Harbin Institute of Technology’s CFT [
9].
The CFT shares the HET axial electric field and radial magnetic field, using the Hall Current to ionize the propellant. The CFT uses Permanent Periodic Magnets (PPM) in series, aligned axially along the chamber with reversing polarity to contain the plasma through the magnetic mirror effect, and avoids plasma contact with the chamber walls that typically results in wall erosion. Wall erosion is one of the main impediments on HET and GIT operational lifetimes and experimental testing on CFT designs has shown no erosion [
5]. The arrangement of the PPM reduces charge losses by restricting the radial motion of the plasma, resulting in high ion beam efficiencies similar to GIT, in the region of 80–90%, compared to 60–70% for HET [
5]. Between the magnetic stages of the PPM, a cusp region forms where the magnetic field runs radially from the chamber wall, repelling the plasma [
5]. This impedes the electrons from moving upstream by the magnetic mirror effect. The magnetic field strength is optimized to concentrate the ion beam discharge to the center of the engine. The cusp regions effectively divide the engine in to separate magnetic cell stages.
The magnetic field strength
B is chosen such that the Larmor radius of the electrons is much smaller than the inner geometry of the discharge chamber. This effectively confines the electrons to the center of the engine that in turn helps to electrostatically confine the ions, of which the magnetic field has little effect upon as the mean free path of the ion is significantly smaller than its gyro radius and is not considered magnetized [
10]. Ions that escape this confinement contribute to an overall positive charge of the chamber wall and therefore an enhancement of ion beam formation [
11]. The CFT has the ionization and acceleration zone separation characterized by the GIT. The thruster also features a steep potential drop occurring immediately after the exit cusp whilst the plasma potential is maintained at a relatively constant level throughout the engine [
5,
11,
12,
13]. This is mainly due to the magnetic cusp at the thruster exit. The electrons emitted from the cathode are trapped here and form the cloud. The neutralizer, while not necessary for performance, also prevents the discharge from interfering with other spacecraft systems. The confined electron cloud acts as a virtual acceleration grid, like the GIT, resulting in high efficiencies and ions close to the potential of the anode.
Focusing on the need for micro thrust propulsion solutions for high precision station keeping of satellites, a parametric study to downscale the original HEMP-T concept was conducted by Keller et al. [
3]. Reducing the size of the CFT could result in better performance over current EP thrusters, with reduced weight, reduced fuel consumption and therefore more launch cost savings for satellites applications. Keller et al. [
3] conducted a performance parameterization study of the HEMP-T design. In their efforts to scale down the size of the thruster into the micro-newton thrust range, they have shown the relation of several inter-related sizing parameters. Testing various thruster configurations and the sensitivity of parameters (chamber diameter, magnetic ring outer diameter, the distance between magnetic stages and the number of stages) to four output performance measures (mass flow, anode current, plume divergence, acceleration efficiency), an approximate range of values for the micro-newton thrust level was obtained. These specifications provide some insight into the sizing sensitivity of the design and deliver key indicators in the way of thruster sizing ratios such as increasing magnetic field intensity for decreasing discharge chamber diameters to reduce losses. However, the performance remained considerably low in comparison, with the larger scale counterparts with a maximum
Isp achieved of 2000 s, whereas the higher end of the performance ranged upwards of 3000 s [
6]. These results reflect the geometric scaling challenges as explored with closed drift thrusters [
14].
A state-of-the-art methodology to investigate such higher end performance ranges has been developed by coupling an analytical global-variable based steady-state power and plasma model solver and a multi-objective design optimization (MDO) capability based on evolutionary algorithms. This approach enables robust and effective population-based optimization, assisted by surrogate modeling, which can reduce the computational cost by approximating the model calculation in lieu of expensive true computational evaluation. The coupled simulation/MDO approach builds on the preceding work by Muffatti and Ogawa [
15] through the utilization of a higher fidelity simulation for more accurate results. This paper presents the outcomes of a multi-objective design optimization of a small-scale CFT analysis that has been conducted for three major objectives commonly targeted in spacecraft propulsion; that is, (1) thrust
T, (2) efficiency
ηt, and (3) specific impulse
Isp. The magnetic topology is examined for representative high-performance configurations to investigate the underlying thruster physics. The surrogate models are trained with the archive of solutions evaluated during the optimization. They are used to perform variance-based global sensitivity analysis to identify the key design factors as well as an additional large-scale optimization solely employing the surrogate prediction to better capture the effects of the design parameters on the CFT’s performance.
2. Materials and Methods
The key indicators of thruster performance, thrust
T, total efficiency
ηt, and specific impulse
Isp, are used to determine the performance of the downscaled CFT in comparison to similar propulsion devices. Starting with the basic relations of spacecraft propulsion thrust
T equating with force on a charged particle in an electric field, specific impulse
Isp and power
Pa [
2,
10,
16].
where
E is the magnitude of the electric field, Φ
a and
Ia are the anode voltage and current, respectively, and
m is the mass flow rate of propellant (anode and cathode). The total efficiency is defined by the ratio of jet power to anode power
Pa. However, for HET, anode efficiency is generally utilized, defined as:
Expansion on the component efficiencies introduces more measurable voltage
ηv, beam
ηb, and utilization efficiencies
ηu [
17]. Voltage efficiency refers to how efficiently the ions are accelerated by the anode potential; the beam efficiency relates the anode current to the beam current and the utilization efficiency refers to how much propellant is ionized to create the ion beam.
From Goebel and Katz [
2], the beam current can be determined through the mass flow rate.
where the subscript
b indicates the ion beam,
Q is the averaged ionic charge,
Ib is the total ion current in the beam, cos
2θ accounts for plume divergence where ions are not accelerated parallel to the engine axis,
M is the mass of propellant atoms (2.18 × 10
−25 kg for Xe) and
e is the elementary charge (1.602 × 10
−19 C). The propellant is assumed to be Xenon, which is typical for CFT. Equation (6) is a basic equation that assumes 100% ionization and singly ionized for HETs, while it would not fully describe low ionization at low voltages and multiply charged ions at high voltages, which could occur in practical applications.
A key feature of the CFT concept is the high voltage operational ranges, typically between 500 and 2000 V. Keller et al. [
3] found anode voltages below 500 V resulted in lower efficiencies at the same mass flow rates, which was supported by the results of Ma et al. [
9]. Thus, the effects of low ionization were not captured by this study. The experimental study and theoretical characterization of thrust in Keller, et al. [
3] assume that the ion current can be approximated by the anode current with a less than 20% error and that the particles are singly ionized totally. Matlock [
17] measures the ion beam current for the DCFT through electrostatic probing. The mass utilization efficiency, described in part in Equation (7), is sensitive to the beam current and mass flow. As a result, this study assumes that the ion beam current can be sufficiently approximated by Equation (6), with the consideration of presence of up to 20% doubly charged ions in the mass utilization efficiency for the MDO process. This is detailed in Goebel and Katz [
2], where the mass utilization efficiency correction factor is given by
αm, which consequently resulted in the effects of multiple ion species largely not being captured in this study with
αm = 0.9.
Applying this methodology without the correction factor to the Variable Magnet Length Cusped Field Thruster (VML-CFT) validation case of Ma et al. [
9], resulted in a mass utilization efficiency of 89%, which correlates well to the results of Matlock [
17] in a comparable study on the DCFT, where the mass utilization efficiency was experimentally measured to be 87%.
The plume divergence efficiency is not taken into account in the present model. Experimental testing would be required to accurately determine the divergence angle. A divergence angle of θ
g = 60° can be assumed based on Keller et al. [
3], and this is supported by the measured divergence angle of 56° of the DCFT by Matlock [
17]. The divergence efficiency can be defined by Löb and Freisinger [
18] by
The assumptions made regarding the acceleration, divergence and utilization efficiencies will be applied in post processing of the MDO results, as these are factors which this study is unable to accurately define with the present methodology and will have a uniform effect on the objective parameters.
Kornfeld et al. [
5] describe a simplified power balance description of the HEMP-T based on the plasma fluid theory. A one-dimensional set of equations (28 in total) to be solved simultaneously can be used to obtain a reasonable estimate of the thruster performance. As the only known values in the equation set are the probabilities to reach the channel wall at the cusp locations and these probabilities are based on the magnetic field strength, the thruster performance can be estimated through only a few parameters. These are anode potential, anode current and the ratio of magnetic field strength from the axially aligned region to where the fields radially cross the discharge channel walls, i.e., the magnetic mirror strength. It is also important to note that the ratios (described in Kornfeld et al. [
5]) of power transferred to excitation, ionization and thermalization are only estimations. It is also stated that inclusion of angular and ionization efficiencies could allow for predictions of total thruster efficiency. The following description was derived from the equation system presented by Kornfeld et al. [
5], where a full description of the power model can be found.
The operational principle of the CFT is based on the magnetic mirror effect due to the Permanent Periodic Magnets (PPM), which reduces losses from electrons impinging on the discharge chamber walls. This is because the particle is acted on by the Lorentz force, where the magnetic field does not have an impact on the particle, rather an axial force relative to the magnetic field acts on the particle in the opposite direction defined by the Lorentz force in a cylindrical field [
2,
13,
15,
19].
When the particle is moving through a magnetic field of increasing strength, the magnetic moment is constant, which means that the magnetic moment at the high field and at the low field can be balanced by equating the magnetic moment of two points, where the subscript 0 indicates the low field and
m the high field.
Through the conservation of the particle kinetic energy, the velocity of the particle is defined by parallel and perpendicular velocity components.
The magnetic mirror effect is not entirely efficient, with the direction of the velocity vector needing to be within an acceptance angle in order to escape the mirror effect. This is established between the difference of the high and low magnetic field strength regions, as derived below [
19]:
This is then used to calculate the cusp arrival probabilities of the electrons, which is used as the basis for thruster performance using the one dimensional power equations [
5]:
The cusp arrival probabilities are directly related to the accuracy of the simulated magnetic topologies of the thruster, which is calculated by means of two-dimensional electromagnetic field analysis.
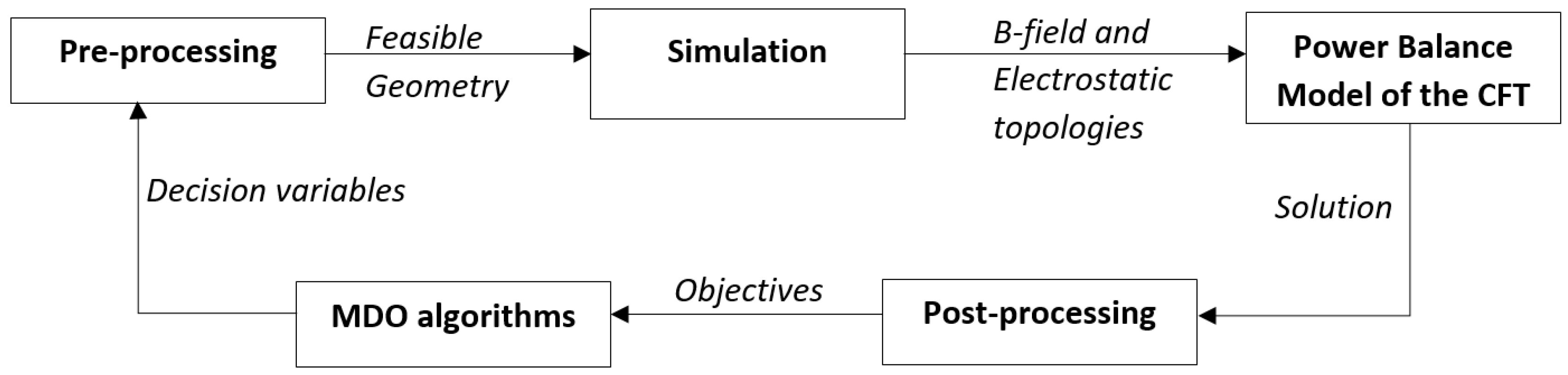
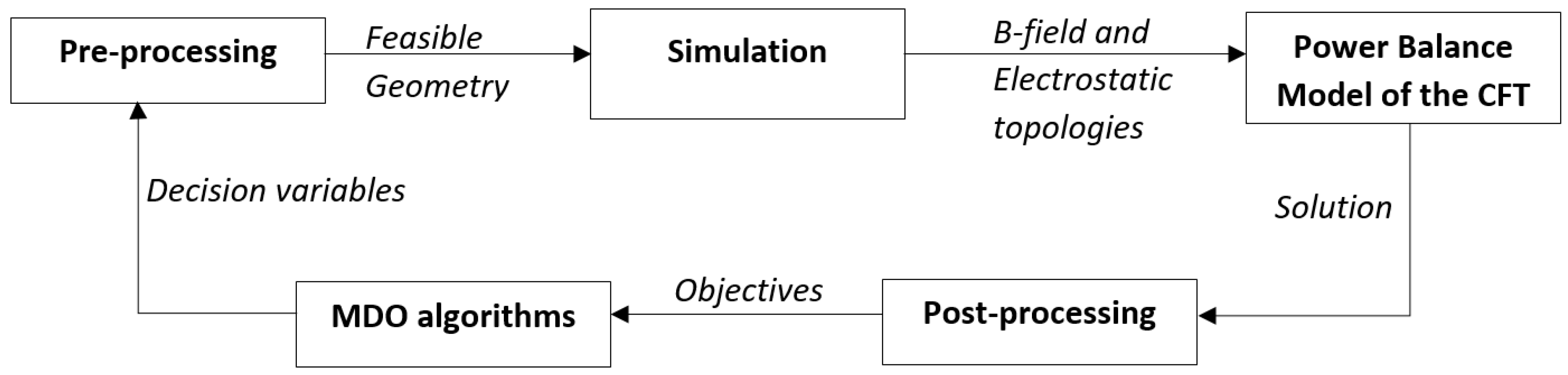
Shown in
Figure 1 is the process chain followed to produce decision variables and delivery of the objective functions. The decision variables are assessed to assure the geometry is physically possible before they are passed onto the software ANSYS Maxwell [
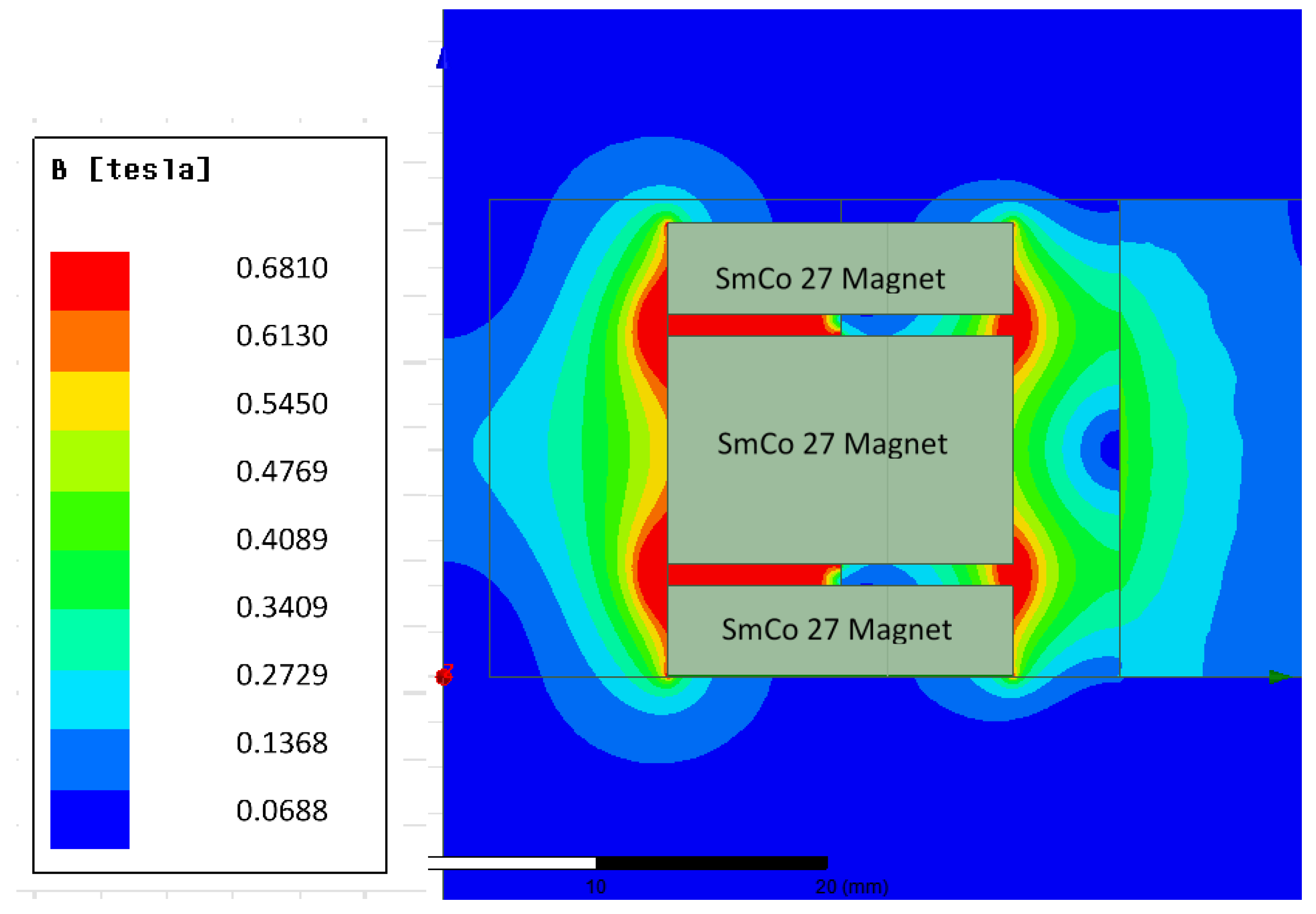
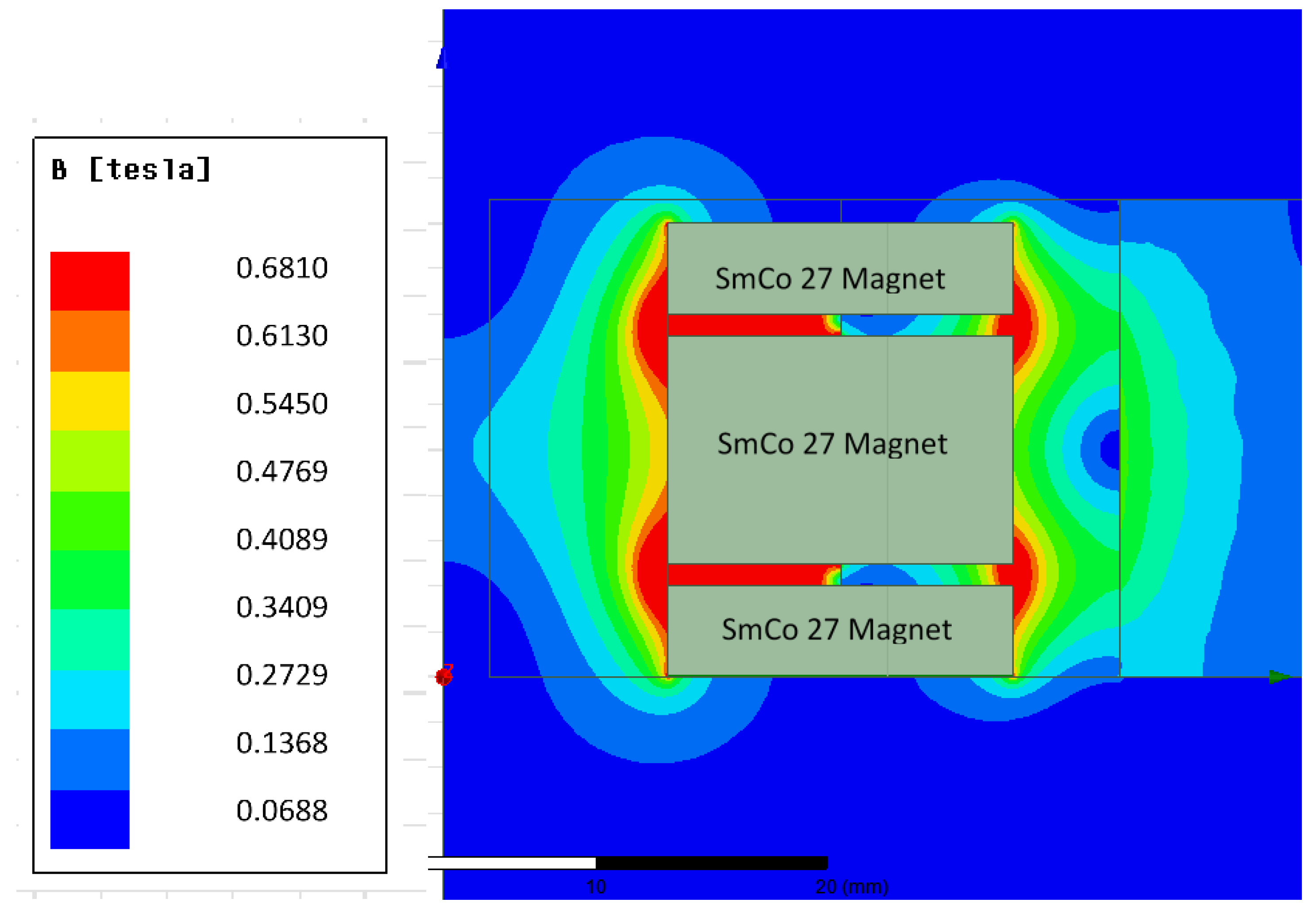
20] for model construction and the computation of the magnetic field. Magnetostatic analysis is then performed to calculate the magnetic field strength topologies (
Figure 2), and then an electrostatic analysis is performed to determine the potential at the thruster exit and in the plume.
The data is extracted from the magnetic topology to compute the cusp arrival probability for each location throughout the thruster. These conditions are subsequently passed to be used in the power balance calculation. The resultant solutions from this are post-processed to deliver the objectives and assess if they lie within the set of physical constraints. They are then submitted to the MDO algorithms for evaluation. This cycle repeats as more designs are produced and evaluated as per the set criteria.
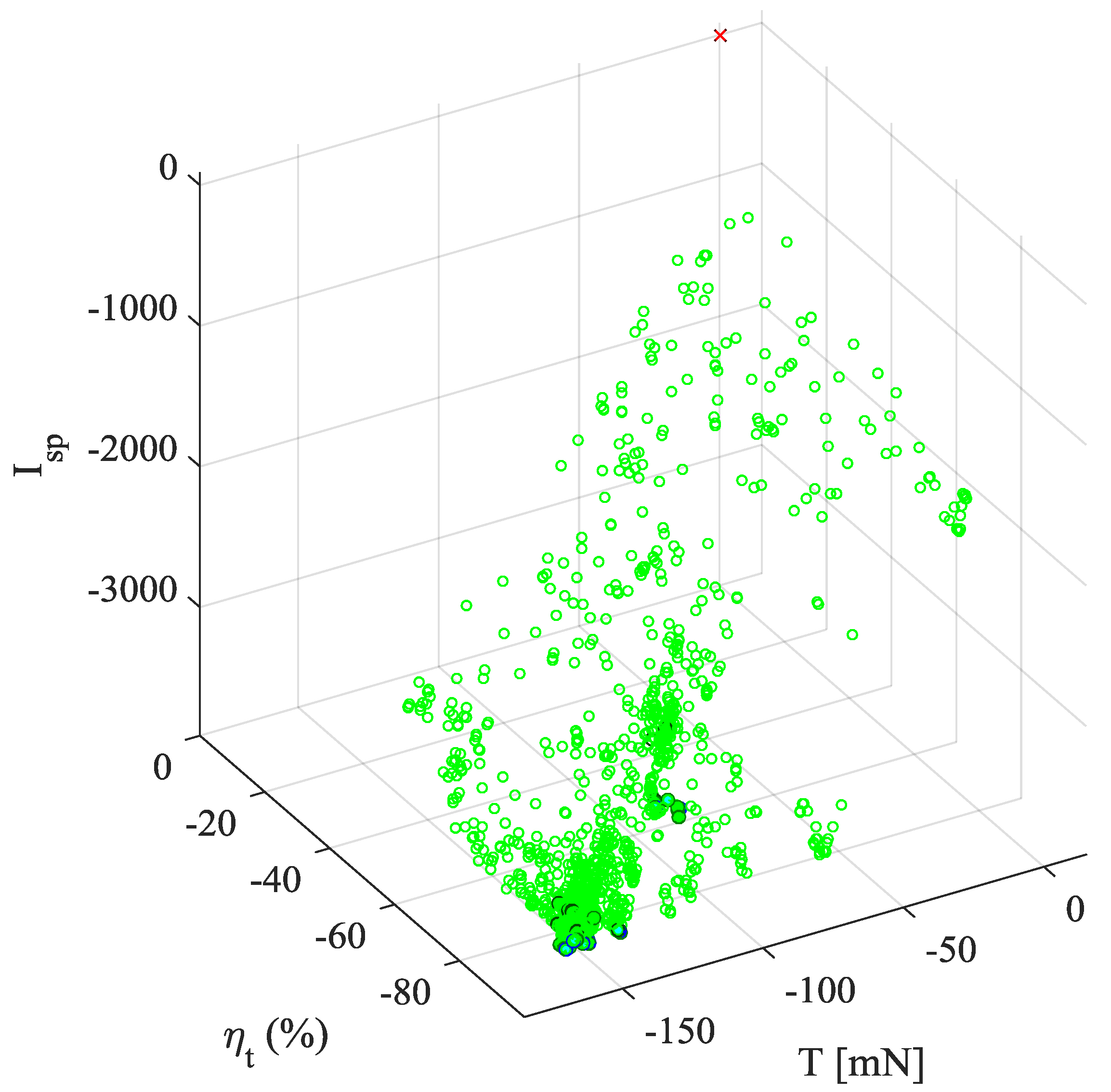
Design optimization is performed by employing evolutionary algorithms [
21,
22]. In particular, use is made of the elitist non-dominated sorting genetic algorithm [
23] assisted by surrogate modelling. It is a population-based approach where the candidate solutions in the population pool evolve over generations. A population size of
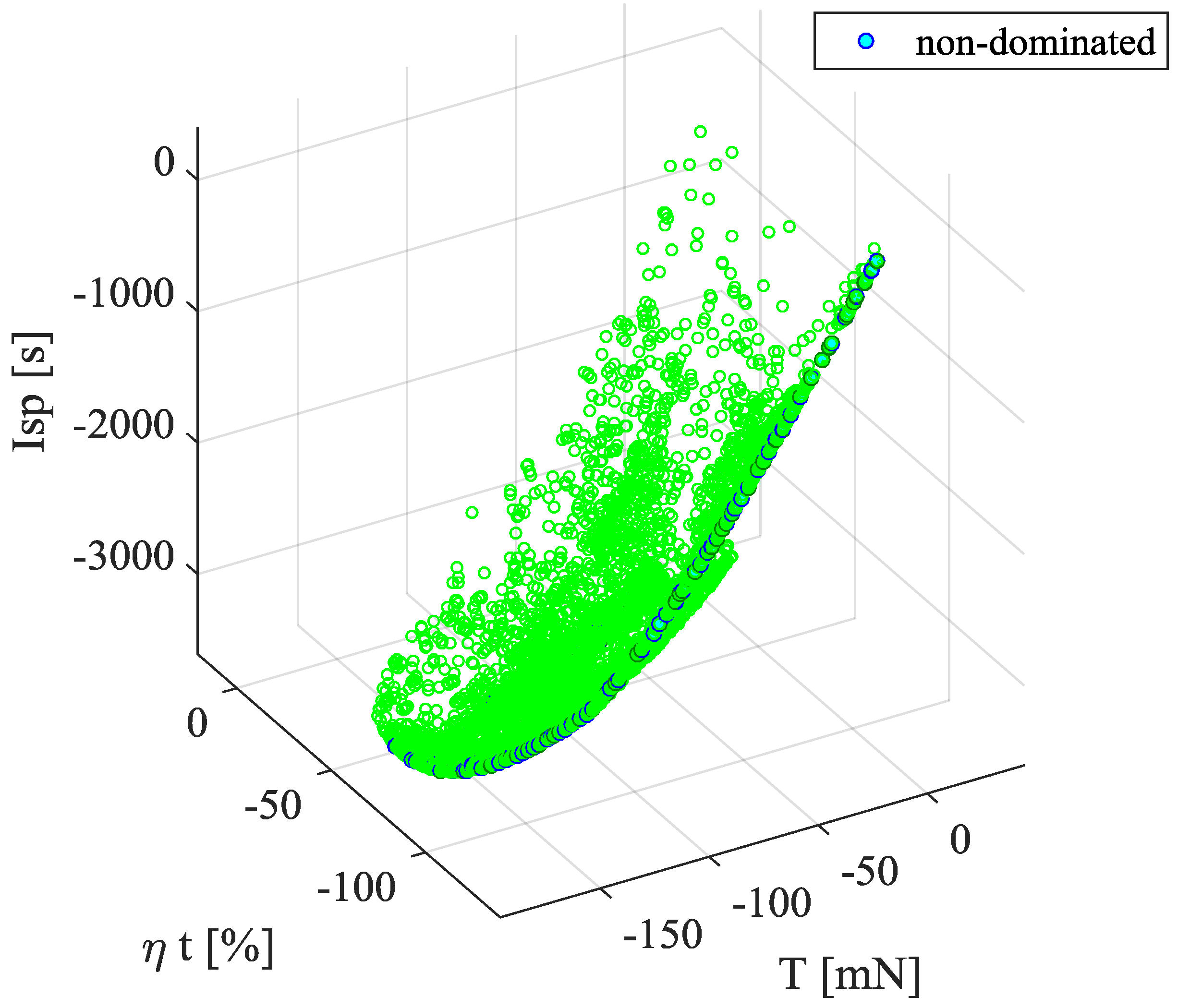
N = 64 is used in this study to be evolved over 40 generations for the initial MDO study employing simulation, and that of
N = 100 over 100 generations in the MDO run performed solely based on prediction from surrogate models. These values have been chosen to sufficiently explore the design space for a three-objective design problem with five decision variables within reasonable computational effort. Recombination operators are applied to the previous generation’s decision variable values to create offspring. A simulated binary crossover and polynomial mutation are used as recombination operators at a given probability (1.0 and 0.1, respectively, in this study) with a specified distribution index (10 and 20, respectively) [
22]. The use of a strongly elitist non-dominated sorting genetic algorithm always retains the best solutions across generations. This means that there is no incentive for parents to survive but to use the crossover mutation to broaden the search for better solutions; hence the crossover probability is given by 1.0. Surrogate modelling [
24] is commissioned to estimate the possible values of the objectives and constraints in an inexpensive manner, imitating the behaviour of the solutions from the magnetic and power analyses with meta-models characterized by appropriate mathematical functions based on the magnetostatic, electrostatic and power balance simulations. Different surrogate models are employed to best predict the thruster performance with a minimum error threshold satisfied, as discussed below. The surrogates are constructed by using a fraction (90% in this study) of the actual solutions calculated from the magnetic and power distribution models to prevent over fitting, whereas the remainder (10%) of the evaluated solutions are used to assess the performance of the surrogate models [
22]. Surrogates for each of the objective and constraint functions are trained by using a subset of the archive, which is created by selecting the solutions closest to the centroids of the
k clusters obtained through
k-means clustering [
25]. Multiple surrogate models are considered and evaluated: quadratic response surface model, [
26] artificial neural network (ANN) models including the radial basis function network [
27] and multilayer perceptron model, [
28] which are single-layer and feed forward types of ANN models, respectively, and Kriging model based on Gaussian process regression [
29]. The mean squared error (MSE) in the actual and predicted values of the objectives and constraints is calculated for the remaining (10%) solutions and used as the measure to validate the surrogate models. Prediction from the best surrogate model with a minimum error is adopted to replace simulation analysis, only if the MSE is within a threshold value of 5% for all objective and constraint functions, which has been set to effectively allow reasonable investigation by striking a balance between prediction accuracy and computational cost, and the distance to the closest point in the archive is smaller than 5% [
22]. The advantage of the MDO approach undertaken in the present study is the ability to maintain multiple objectives and perform optimization to aim at all the objectives simultaneously, which is the primary virtue of MDO. This removes the no need for weighting on the objectives to convert a multiple-objective optimization problem to a single objective one, as required for a single-objective optimization framework.
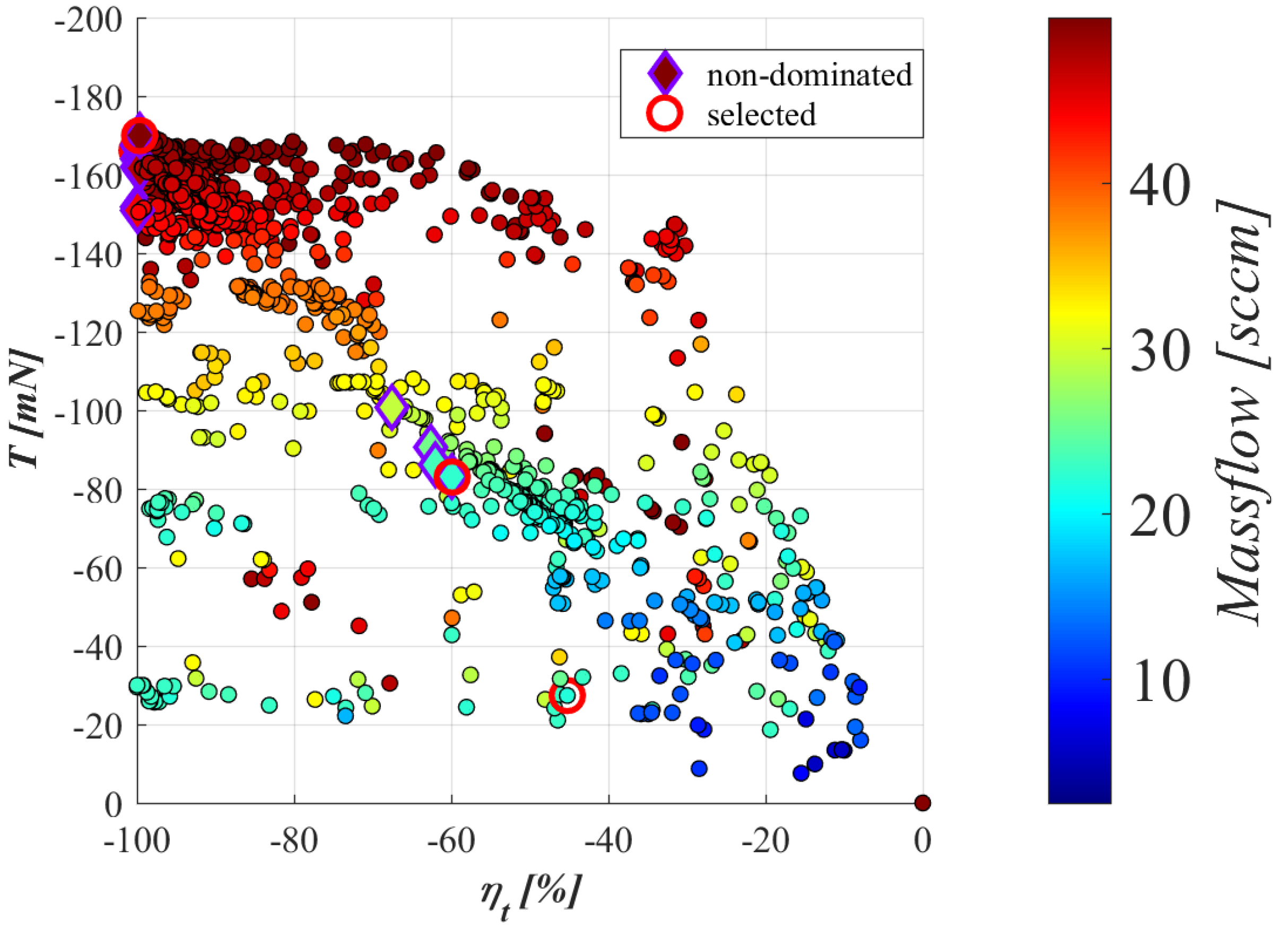
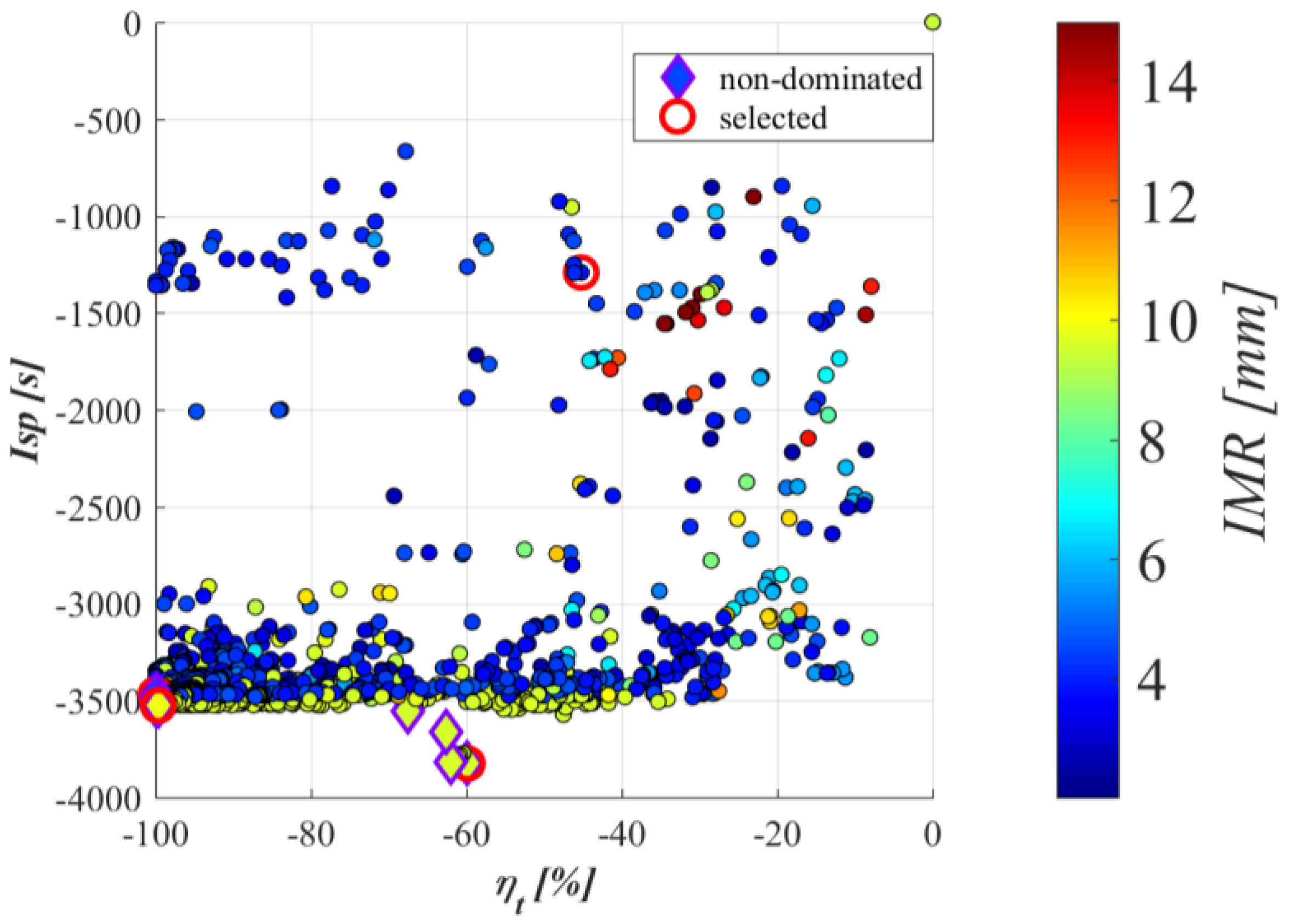
The three objective functions used to evaluate design performance are thrust
T, efficiency
ηt and specific impulse
Isp (the efficiency term with the subscript
t is somewhat of a misnomer here, usually descriptive of total efficiency, and it must be stated that the model presented in this paper does not take into consideration plume divergence losses or an accurate representation of acceleration efficiencies). The
ηt term is comprised of the measures of efficiencies within the thruster model, that is, the beam efficiency
ηb, the mass utilization efficiency
ηu and the voltage efficiency
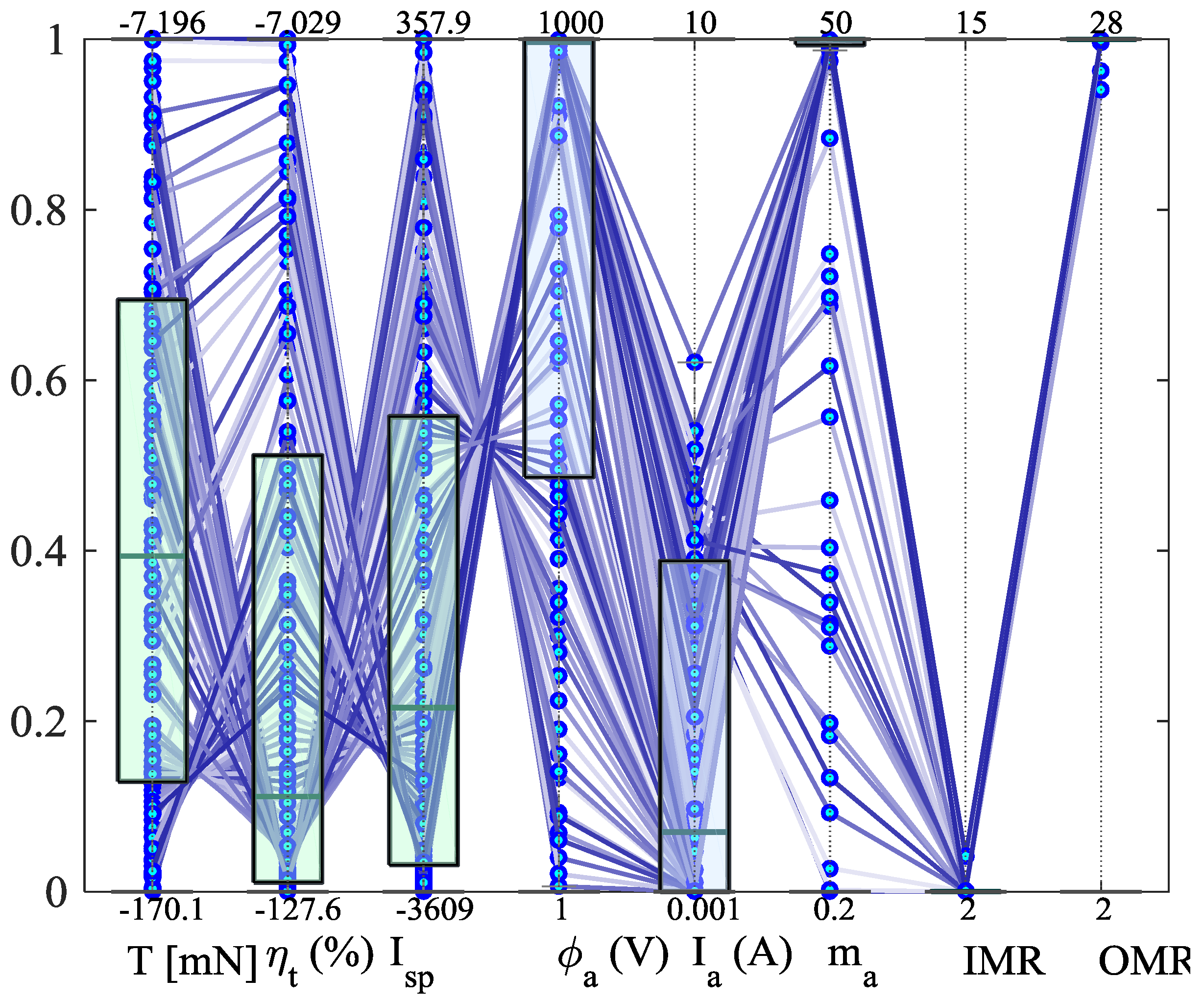
ηv. The decision variables and their input ranges are chosen to represent the main design factors investigated in this study (shown in Algorithm 1) are Φ
a (V),
Ia (A),
mf (sccm), Inner Magnetic Radius (IMR) (mm), and Outer Magnetic Radius (OMR) (mm). The optimization statement can be expressed as follows (the negative sign for the objective functions denotes a maximization problem). The decision parameters Φ
a (V),
Ia (A), and
mf (sccm) relate to the objective functions through Equations (1)–(5) and the initial conditions of the CFT at the anode. The magnetic radii, IMR and OMR, are related to the objective functions through the one-dimensional simplified power balance model. The radii effect the strength of the magnetic field in the high and low regions which is used to solve the power balance model, describing the plasma potentials, cusp potentials, ionization source currents, and electron and ion currents across plasma cells that divide the discharge chamber length in the simplified model. From this determination, the beam and grid efficiencies is made, calculating power losses at the anode, cusps and due to ionization and excitations, which impacts on each separate objective function.
| Algorithm 1 Optimization parameters |
| Maximize: | T, ηt, Isp |
| Subject to: | 0 ≤ Φa (V) ≤ 1000 |
| 0 ≤ Ia (A) ≤ 10 |
| 0.2 ≤ ma (sccm) ≤ 50 |
| 2 ≤ IMR (mm) ≤ 50 |
| 2 ≤ OMR (mm) ≤ 50 |
To validate this approach, a model of the experimental setup of the CFT thrusters from the available literature are created using ANSYS Maxwell. The selected experimental model to validate the procedure is the VML-CFT from Ma et al. [
9]. This model is considered because of its detailed account of the physical dimensions and material properties of the thruster and its subsequent analysis of the results gives a robust range of observation points that can be modeled and compared.
From the simulated model, two analyses are performed; firstly, a magnetostatic solver is used to determine the magnetic field strength at the cusps along the inner engine radius/wall. This magnetic strength is compared to the magnetic strength at the centerline of the engine, where the particles are in the observed loss cone [
17,
19]. The difference between the magnetic field strengths is used to determine the Magnetic Mirror Ratio at each cusp. This is then used to calculate the cusp arrival probabilities at each magnetic cusp. The cusps arrival probabilities for the validation model at the four magnetic cusps are shown in
Table 1.
The calculated cusp probabilities accuracy is difficult to determine through a lack of available reference data. From the literature, it is expected that the cusp probabilities will differ significantly from the experimental probing of the thrusters. From the data of Kornfeld, et al. [
5], from which the simplified HEMP-T model originates, the cusp probabilities observed in thruster Demonstration Model (DM) 9.2 and DM 10 appear to correlate well with the exception C
2 and C
4 which is expected to be significantly larger then measured. The cusp arrival probabilities are expected to be below 5% of electrons with a noted maximum at the third cusp. While this is reflected in the simulations, the validation of the cusp arrival probabilities is significantly underpinned by the overall accuracy of the simplified HEMP-T model by Kornfeld, et al. [
5], and in comparison to experimental research (as documented in
Table 2) as well as in comparison to the preceding results by Muffatti and Ogawa [
15], especially in relation to efficiency.
The second analysis performed is an electrostatic simulation, which is used to calculate the potential drop in the plume. Using the electrostatic analysis results, the difference between the cusp potentials at the plume cell and the thruster exit can be more accurately predicted in line with observations made in the literature. The simplified HEMP-T model Kornfeld et al. [
5] tended to over predict the potential in the plume region, which gave rise to efficiency inaccuracies when calculating the grid efficiency and acceleration efficiency as well as over predicting the beam current,
Ib. The results of the electrostatic thruster solution are shown in
Table 3. It shows the discrepancies between the HEMP-T simplified model assumptions and the observed potential behavior demonstrated in the simulation.
The expected outcomes of the internal magnetic cell potentials should be in line with the voltage applied to the anode, 500 V for the VML-CFT, in accordance with Kornfeld et al. [
5]. The variation is likely due to electrostatic model setup and the over prediction of the initial conditions using the nonlinear least squares method.
The comparison between the results of Ma, et al. [
9] for a VML thruster with magnetic cell length ratios of 2:9:0.5 is shown in
Table 2. This specific experimental model represented the peak performance characteristics of the thruster. The comparison of the results is very close to the experimental result. Except for the lowest mass flow rate where the total efficiency has an approximate 10% error, the efficiencies are only slightly higher than the measured result with a trend toward convergence with higher propellant mass flow rates. The thrust is measured from two different methods, from Kornfeld et al. [
5] and then from the method described by Keller et al. [
3]. These calculations are both good predictions of the thrust and appear to validate the approach undertaken. With very close predictions for propellant mass flow rates between 20 and 40 sccm, it would be appropriate to restrict the considered design MDO process between these limits. The model was a poor predictor of specific impulse. This appears to be owing to the sensitivity of the
Isp calculation to the small thrust inaccuracy and as a result the
Isp does not see the desired variation with mass flow rate.
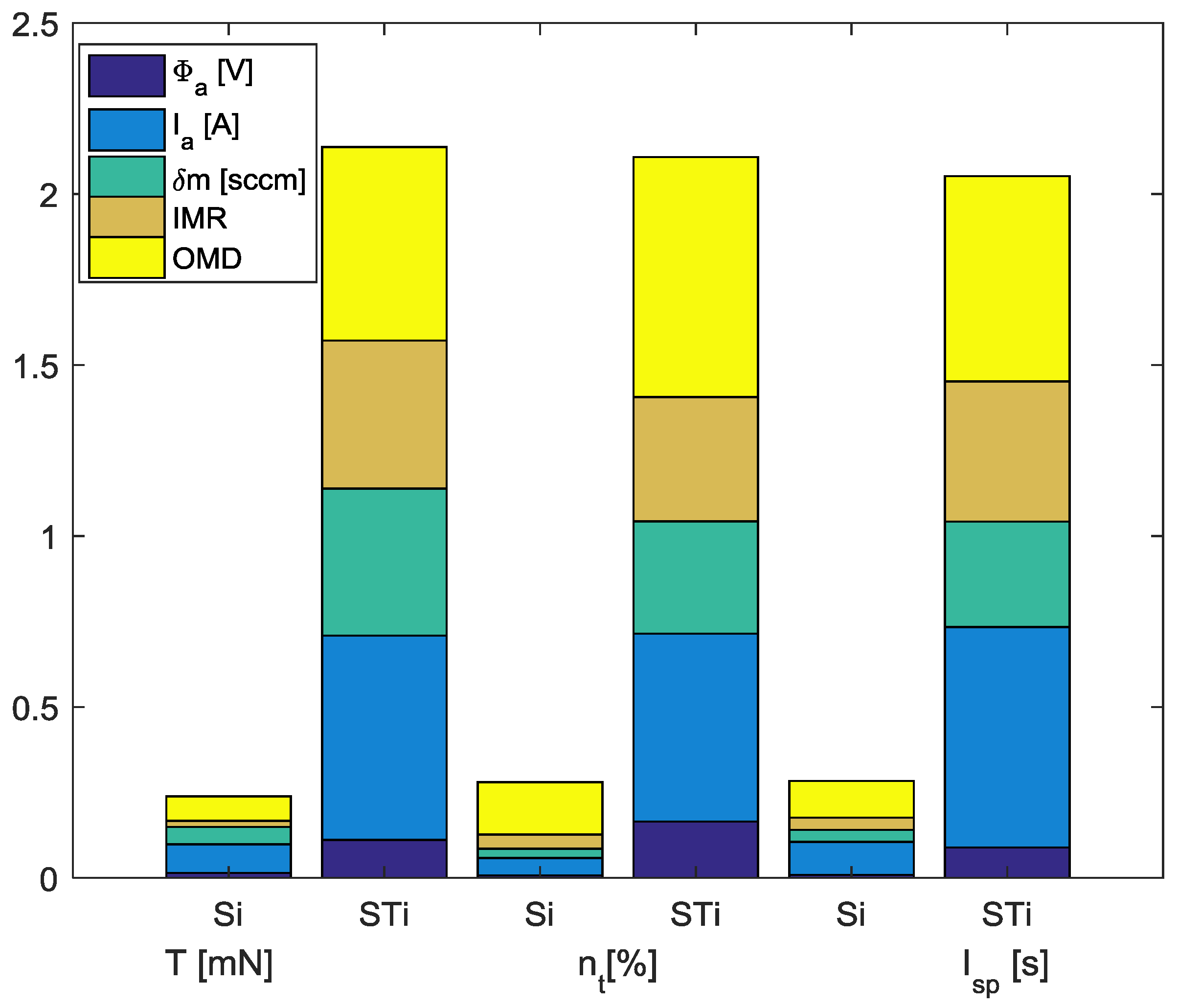
Variance-based global sensitivity analysis is performed to investigate the influence of each decision variable
xi as input (i.e., design parameter) on the objective function
y as output (i.e., thruster performance parameter). A numerical procedure (Sobol’s variance decomposition [
30]) is employed to derive the sensitivity indices, facilitated by surrogate modelling [
24]. Input matrices
X of a base sample quantity of 10,000 and multiple columns for the decision variables are built by using quasi-random numbers [
30] within the range for each variable. Output vectors
Y are obtained by forwarding the input matrices to the surrogate model that is of the greatest prediction accuracy. The first-order indices
Si and total-effect indices
STi are calculated by the method outlined in Reference [
31], defined as:
The CFT model developed in ANSYS Maxwell is designed to be as simple as possible for use in the MDO calculations. This is due to the computationally expensive nature of this process and to facilitate the identification of the relationships between the output objectives and the decision variables. The model is set up for two-dimensional Maxwell simulation, and the CFT is modeled by assuming axis symmetry at the engine axis. The mesh is created with 9000 elements. The thruster itself features a consistently straight chamber, three magnet stages with spacers (doubling as field guides), and the thruster housing. Used in the simulation are Samarium-Cobalt (SmCo) 27 megaguass-oersteds (MGOe) magnets stacked with reversing polarity and the thruster housing material used is Al 6061-T6. The spacers are made from pure iron due to the high conductivity of the material as well as to improve commonality with other HEMP-T/CFT designs [
3,
8,
11,
16]. Several geometric constraints were implemented to restrict the scope and output of the design space, including that imposed on the inner and outer radii, i.e., IMR and OMR. The basic physical constraints implemented into the model are simple in nature, that is, rejection of geometries that overlap in regions as infeasible solutions in MDO. The somewhat arbitrary limitations selected are those for the inner thruster channel geometry (2 mm radius) as a lower limit and the upper limit (50 mm radius) to remain approximately within the limits of the standard CubeSat form. Further restrictions are placed on the utilization of propellant regarding anode current. The upper limit is set in the pre-processing stage where
Ib is replaced with
Ia and cannot produce a value exceeding 1, because the only ion species under consideration are the singly charged variety [
2].
4. Discussion
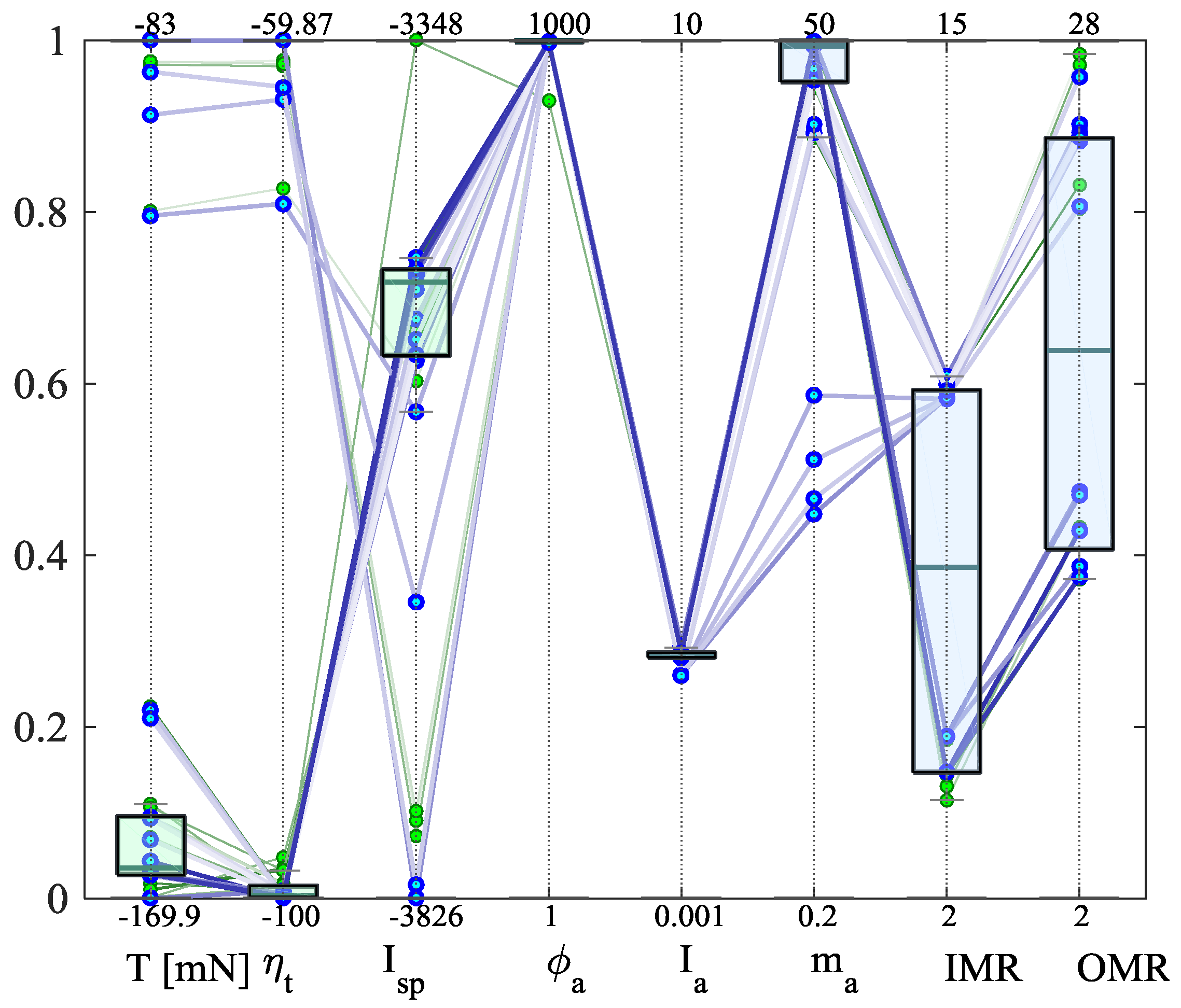
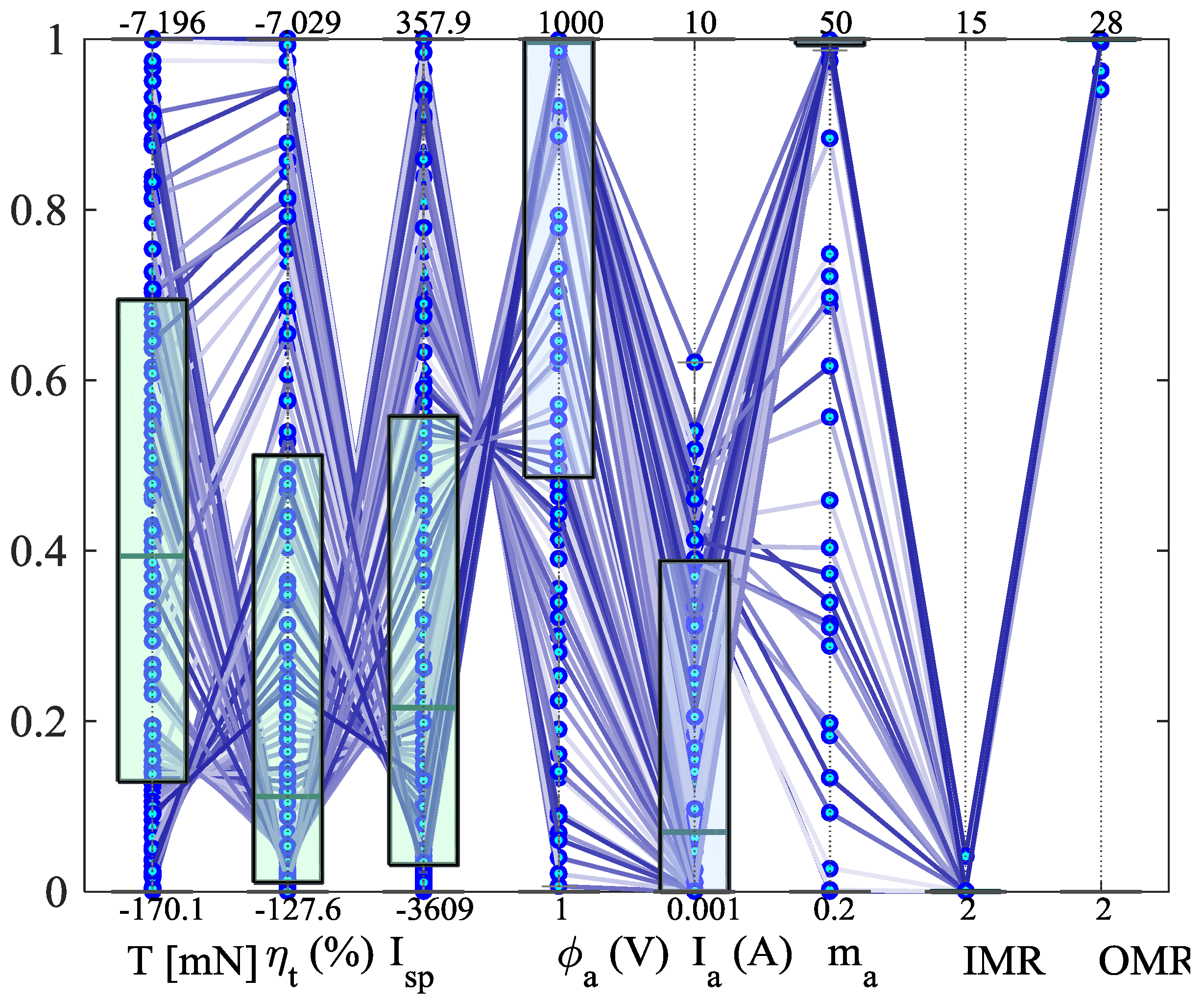
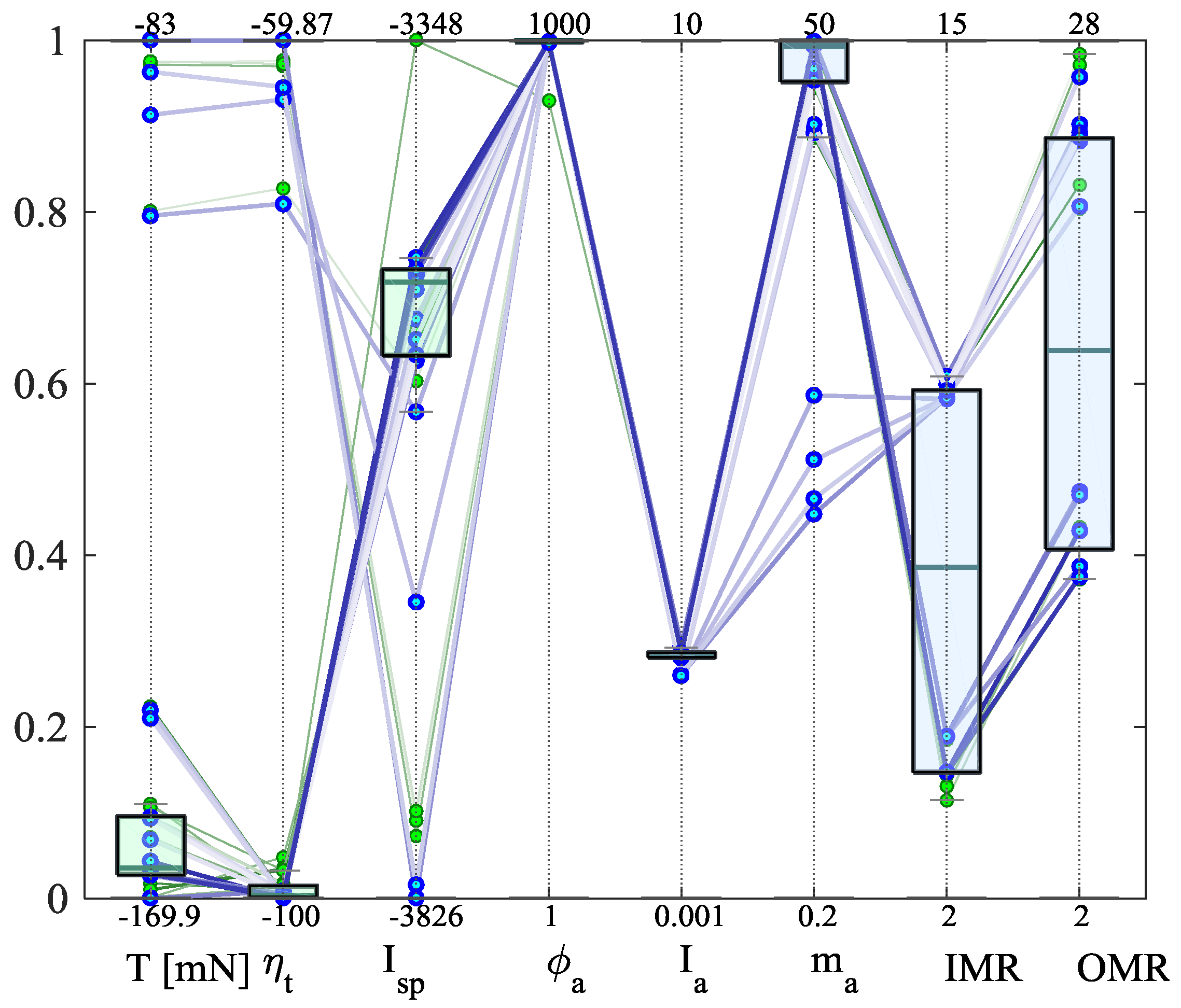
A computational study has been conducted to investigate the characteristics and behavior of the HEMP-T/CFT design, aiming at the application of a downscaled thruster for microsatellite platforms. A multi-objective design optimization using surrogate-assisted evolutionary algorithms has been performed to maximize three performance measures, namely, thrust, efficiency and specific impulse, by incorporating magnetic field analysis with power distribution calculation based on the magnetic mirror condition. A global sensitivity analysis has identified the anode power, mass flow rate and magnet sizing as key design parameters and revealed sensitive, complex interactions when the design is considered holistically. The model is highly non-linear and non-convex, making it difficult to obtain a globally optimum solution. The MDO outcomes presented in
Table 6 indicate evident trends of maximizing Φ
a and
ma for higher performance, as well as unanticipated trends in
Ia, IMR and OMR. The MDO study finds an optimal range for
Ia that does not trend towards maximizing power, and falls within the range of experimental results displayed in
Table 8. The results of the geometric properties, IMR and OMR, are interesting in that they each offer two novel optimum configurations. For IMR, a local optimum is found between 3.5 and 4.0 mm, and a global optimum is located at 9.5–10 mm. Correspondingly, OMR has a globally optimal solution at 25 mm with a local optimum at 13 mm. The results of the MDO confirm that the CFT has a geometric scalable quality which corresponds to a non-linear scale in the performance objectives. Thus, a number of novel solutions are found that reflect the observed sensitivity of geometric properties of the magnets on performance. These solutions correlate well with the limited available data of the experimental setup of Courtney et al. [
7].
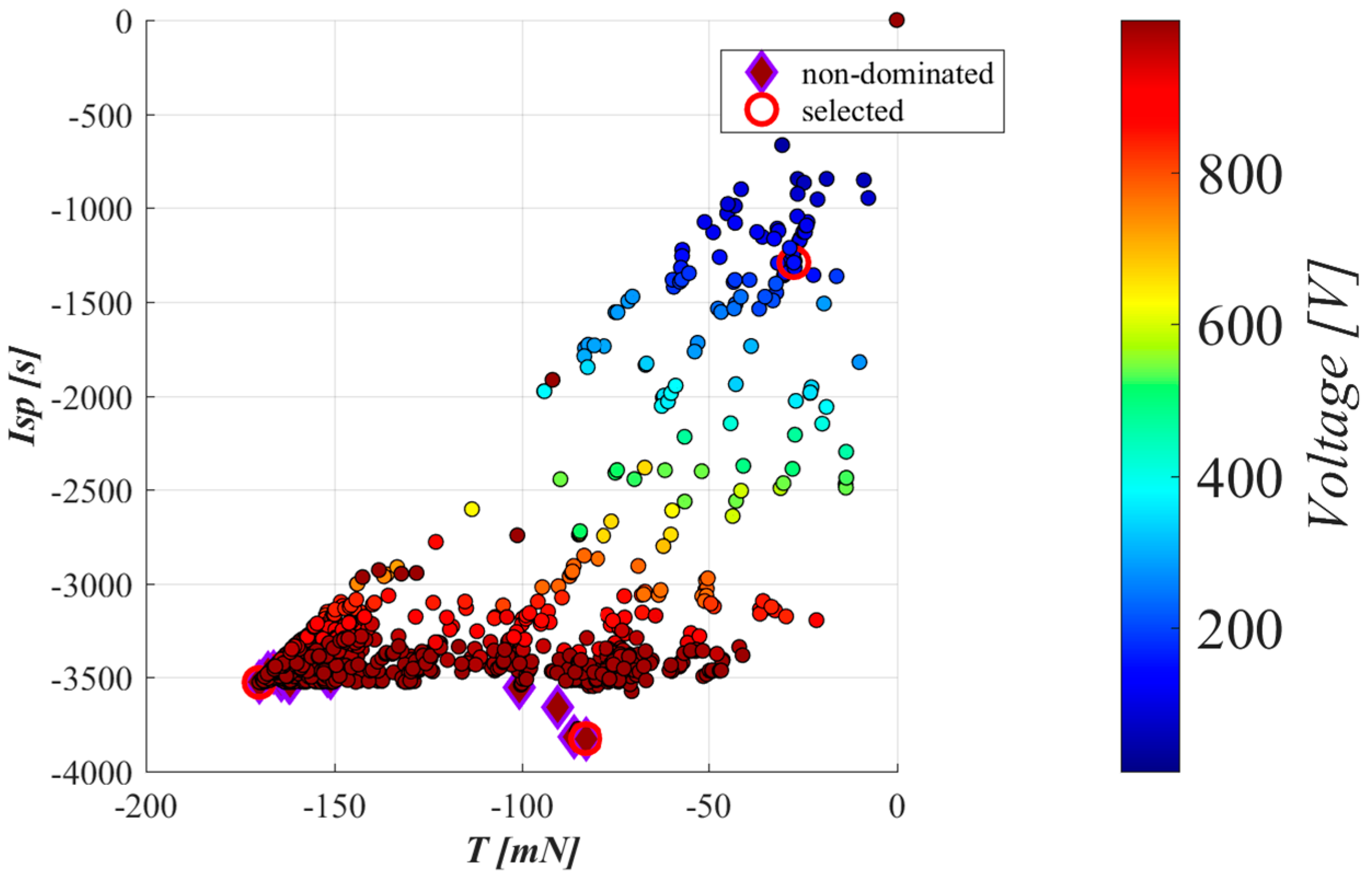
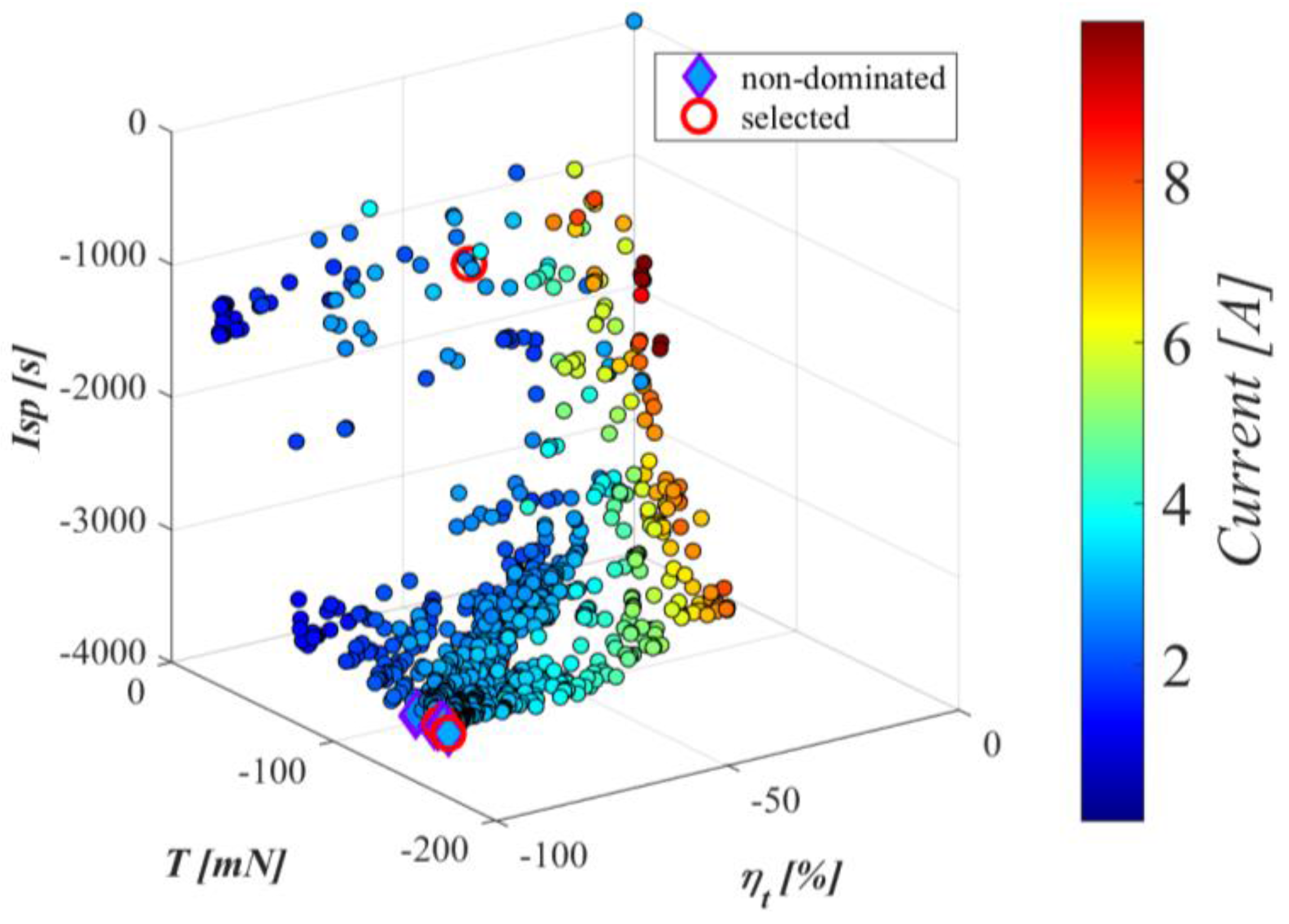
The results of this MDO study on the downscaled CFT performance are able to derive some of the key relationships between the main decision variables and the performance objectives for a simplified model. An upper limit of maximum thrust was determined to be approximately 103 mN. The results of this study are compared to the available experimental data in
Table 8. This is in excess of the results from Ma et al. [
9], 66 mN, which was used at the baseline model for the simulation validation. It is also considerably greater than the thrust measured in experimental studies by Young et al. [
8], 4.9 mN, Courtney et al. [
7], 13.4 mN, Keller et al. [
3], 0.48 mN, and Koch et al. [
11], 50 mN. The results are also very comparable to the performances of HET and GIT. The experimental evidences did not fully explore the design space, and thus the highly non-linear relationships between the performance objectives and the decision variables were not understood adequately [
5].
Table 8 compares the decision variables of the present research with those from previous studies. In comparison to the trends of the existing studies, the results are supported broadly by trends in efficiency, anode potential, and anode current. The predicted efficiency of the S
1 design is within the range of the experimental results excluding Young et al. [
8]. The anode potential correlates to the setups of Reference [
3,
5]. The current anode is between 1.5 A [
5]–4.1 A [
9], where the other research utilizes much lower anode currents. The mass flow rate is much higher in this study due to in part the objectives of the research like Keller et al. [
3], which aimed to minimize thrust for precision station keeping applications.
The design parameters are comparable to Young, et al. [
8] but represent an overall reduction in size to Ma et al. [
9], and Kornfeld et al. [
5] with improved performance in thrust, consequently leading to reduction in thruster weight. The comparative size of the thrusters’ magnets can be optimized to produce high performance for the CFT by applying an MDO algorithm.
In comparison to the MDO study using Finite Element Method Magnetics (FEMM) analysis formerly conducted by Muffatti and Ogawa [
15], an increase in all three objective functions was found. Higher
ma and smaller IMR values indicate the overall disparity between the results. The same observations are made for higher anode potential resulting in higher
Isp and similar performance plateaus for anode current. The geometric variables were found to have larger influence in the present MDO study coupling two-dimensional magnetostatic and electrostatic analyses than the former study with FEMM computation. The design performance was found to be highly sensitive to the anode current,
Ia, and the geometric parameters of the permanent periodic magnets. Overall, an optimal current is found, along with two optimal solutions for the magnetic radii, and thus the thickness of the permanent periodic magnets. Of the selected non-dominated solutions, S
1 has been identified to be the best thruster configuration for the most beneficial performance metrics.
The present MDO study with a simplified model has provided insights into these relationships to increase the CFT performance. Further exploration of the design variables is warranted to increase the fidelity and accuracy of this model, and to include more decision variables in the analysis, with a greater focus on the physical thruster properties, such as chamber length, material, power to thrust ratio, and propellant.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}