Semantic Modelling of Ship Behavior in Harbor Based on Ontology and Dynamic Bayesian Network

 ,
,  ,
, 
 and
and
Abstract
:1. Introduction
2. Literature Review
3. Semantic Network of Ship Behavior
- express the concepts and the implicit correlations of ship behaviors in typical scenes clearly and comply with the rules;
- store the historical behaviors for reasoning, trajectory annotation, and semantic query;
- contain the reasoning method to obtain the potential behavior from the basic behavior.
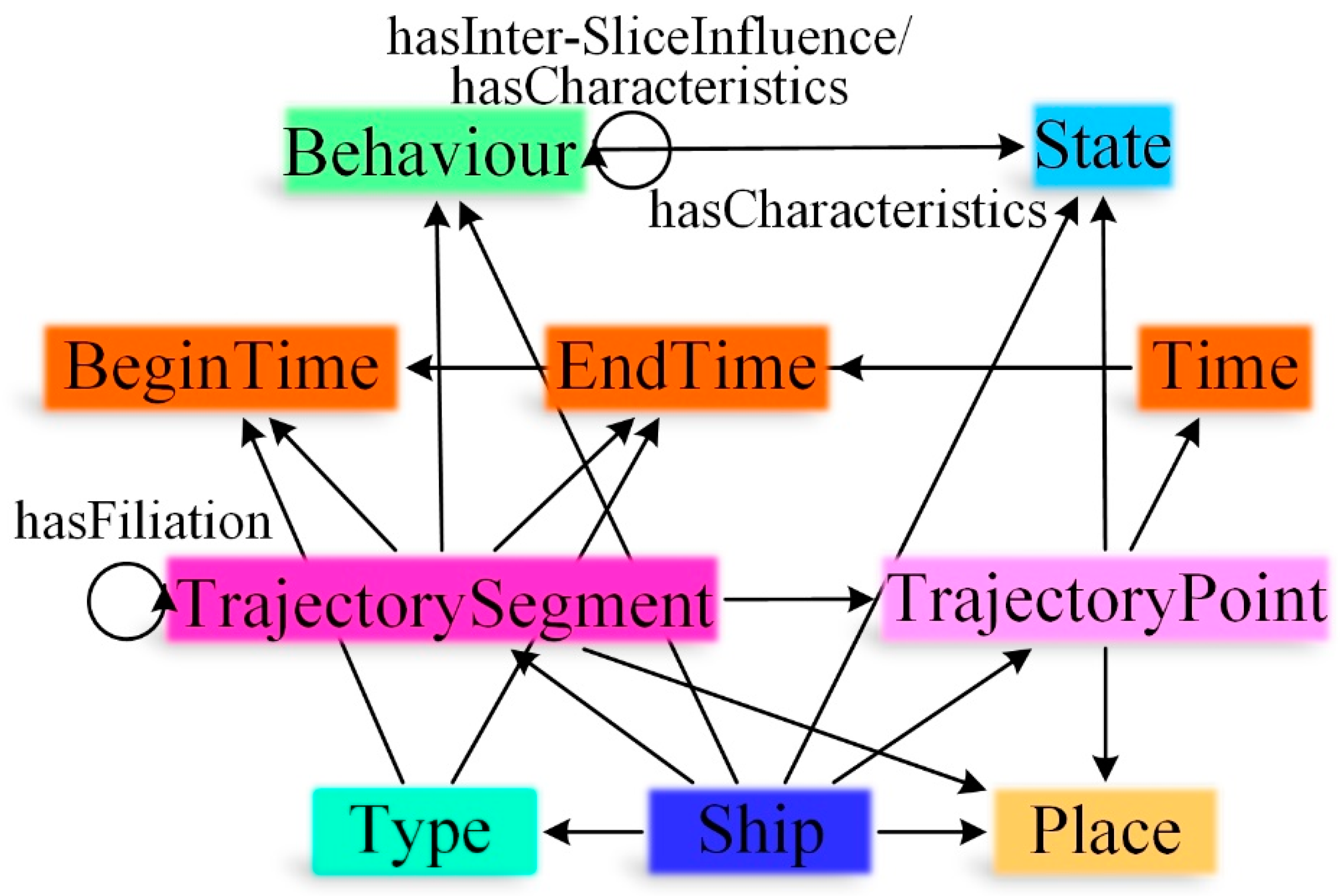
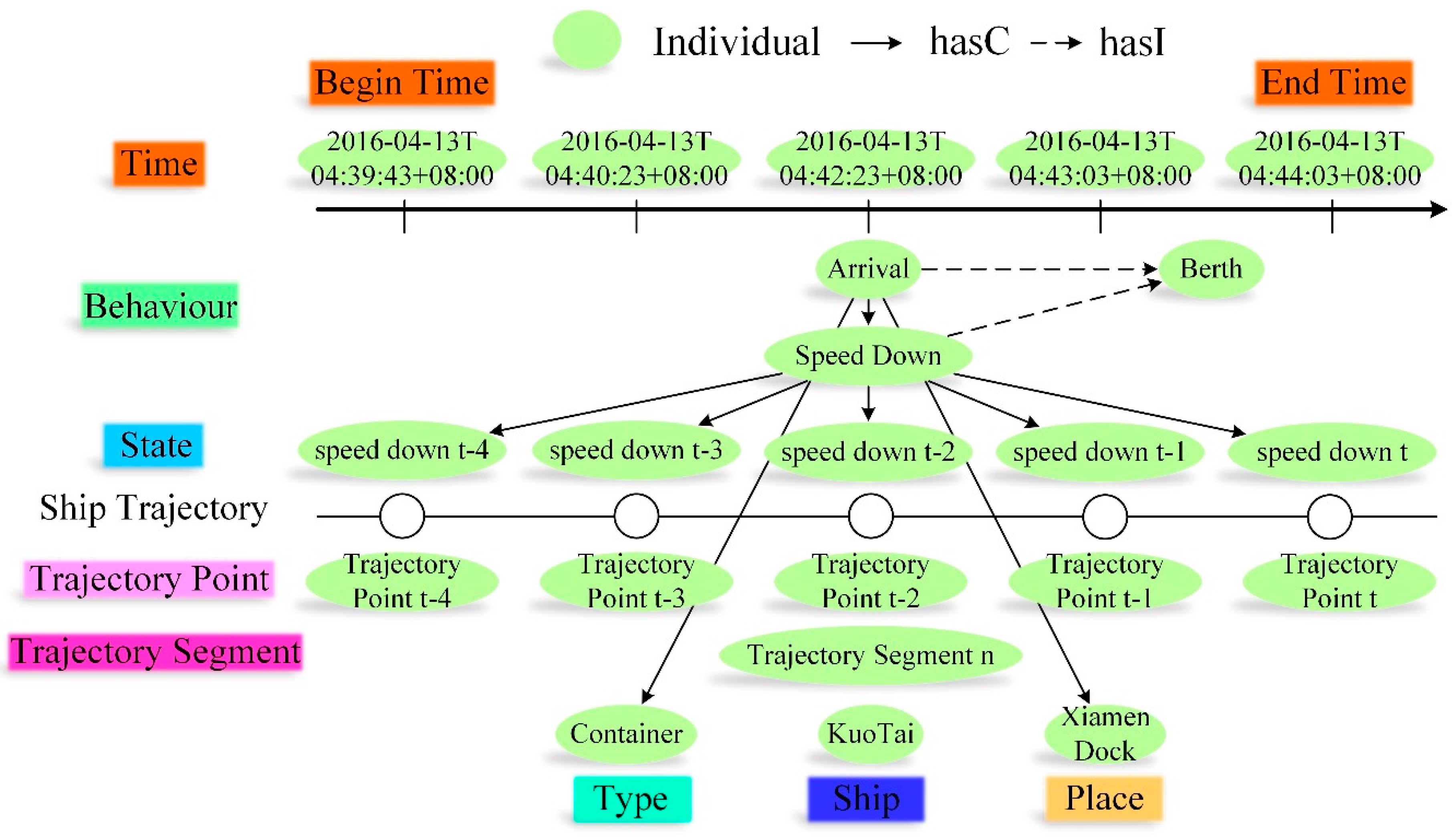
3.1. Framework of the Semantic Network
- Ship is represented by the ship’s unique identifier—MMSI, or ship’s name (such as “KUOTAI”).
- Place can be represented by name, latitude and longitude, or relative position of other geographical locations. It can be related to other ontologies such as GeoNames [33].
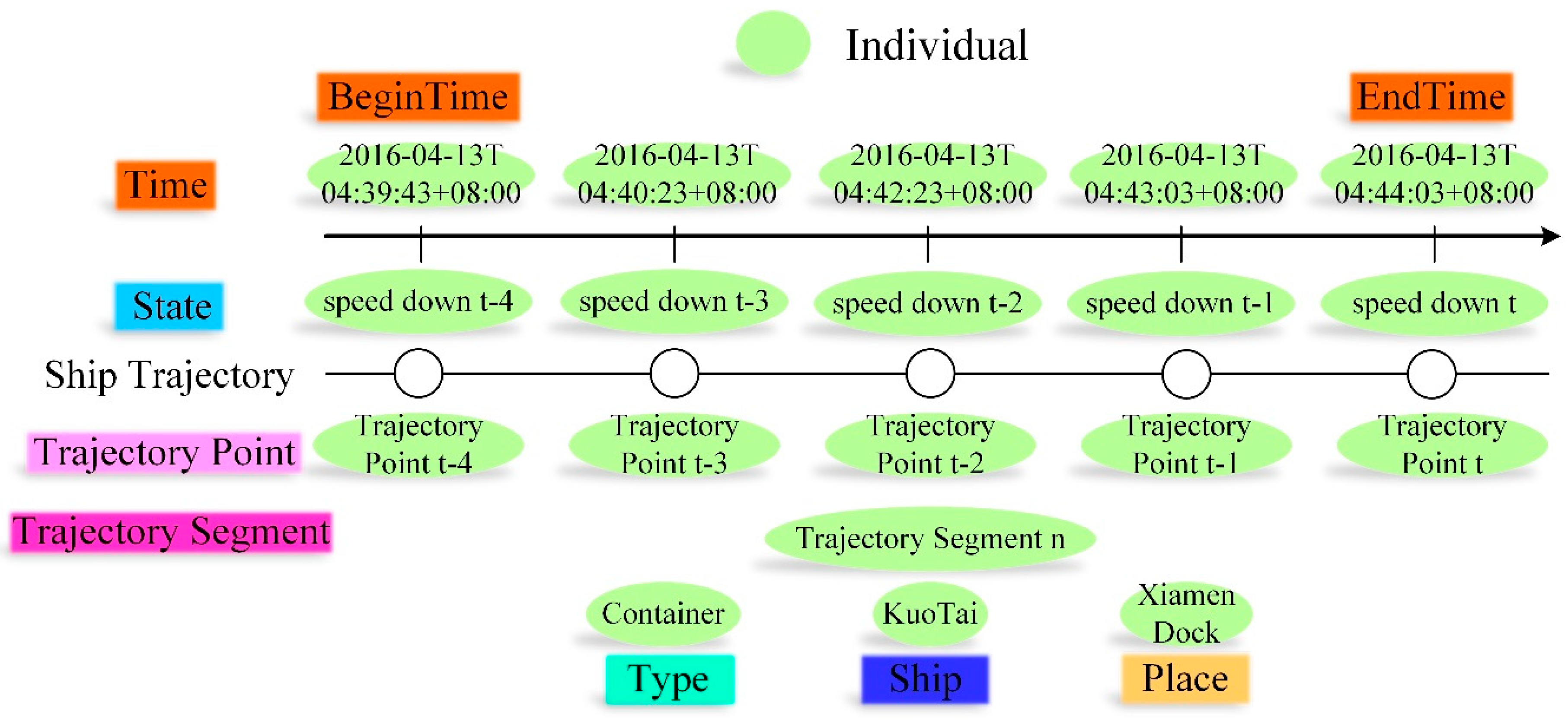
- Time should be consistent with the W3C standard, such as 2018-06-25 T11:55:56+08:00. If the behavior is not finished or the start time is unknown, Time will be ambiguous. It has subclasses Begin Time and End Time, which connect with Type and Trajectory Segment.
- Type indicates the type of ship, including Container Ship, Ferry, and High Speed Ship. The same ship may have different types at different time, e.g., a ship is a tug over a period and a towed ship over another period. Therefore, Type has the properties of has Begin Time and has End Time.
- State (basic behavior) is the information obtained from the trajectory data and the context data directly. It is usually at a certain moment, such as the turning direction and the location. States in all typical scenes of harbor are recognized in Section 4.
- Behavior (potential behavior) usually occurs over a period, such as Turn to Starboard and Speed Down. Behaviors are reasoned from States by DBN, as shown in Section 5.
- Trajectory Segment is part of the trajectory. There is has Filiation property that represents a filiation relationship between two Trajectory Segments, which can guarantee the continuity of trajectory segments. The Trajectory Segment, connecting the Begin Time and the End Time, occurs during the period between them.
- Trajectory Point is the collection of all trajectory points, connected with Time by at Time property.
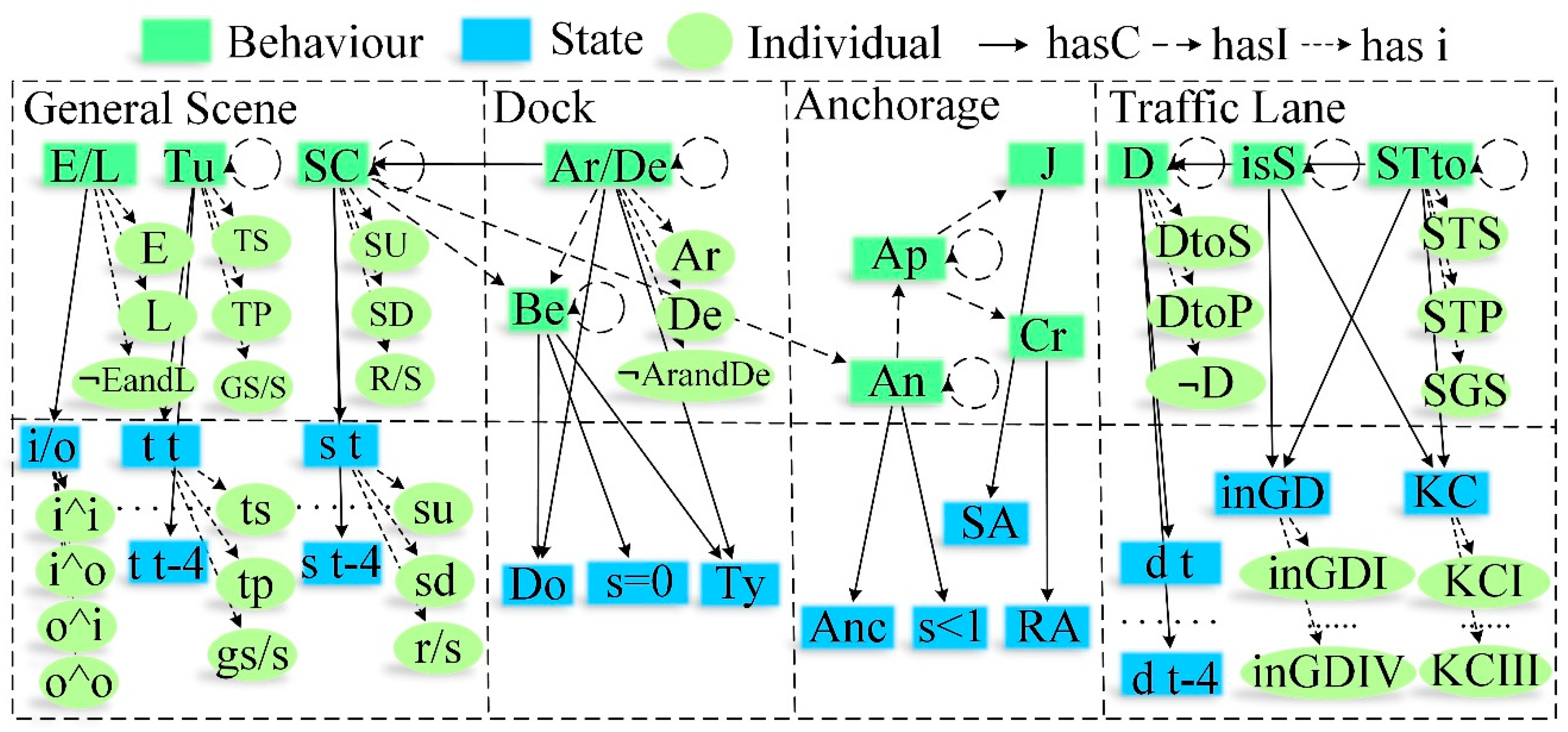
3.2. State and Behavior in the Semantic Network
- Speed Change (SC): The significant speed change over a period, with three Individuals including Speed Up (SU), Speed Down (SD), and Run/Stop (R/S).
- Turning (TU): The significant direction change over a period, with three Individuals including Turn Starboard (TS), Turn Port (TP), and Go Straight/Stop (GS/S).
- Enter/Leave (E/L): The ship enters or leaves an area, and it has three Individuals, including Enter (E), Leave (L), and not Enter and Leave (EandL).
- speed change (s): The velocity change at certain time, and it has similar Individuals with Speed Change.
- turning (t): The direction change at certain time, with similar Individuals with Turning.
- 2TimeSlice in/out (i/o): Two adjacent trajectory points in/out an area, with four Individuals including inΛin, inΛout, outΛout, and outΛin.
- Arrival/Departure (Ar/De): The ship arrives or leaves a dock, with three Individuals including Arrival (Ar), Departure (De), not Arrival, and Departure (ArandDe).
- Berth (B): The ship moors at a dock.
- Dock (Do): The ship is in a dock.
- speed = 0 (s = 0): The velocity equals to 0.
- Type: The type of the ship, such as container. It used to indicate whether the dock is suitable for the type of ship.
- Anchor (An): The ship anchors at an anchorage.
- Approach (Ap): The ship is close to the traffic lane after anchoring.
- Join (J): The ship joins the main traffic flow in the traffic lane after Approach behavior (COLREGS rule 10).
- Cross (C): The ship crosses the traffic lane after Approach behavior (COLREGS rule 10).
- Anchorage (Anc): The ship is in an anchorage.
- speed < 1 (s < 1): The velocity is less than 1 kn.
- Right Angle (RA): The ship approaches the traffic lane at a right angle.
- Small Angle (SA): The ship approaches the traffic lane at a small angle.
- Deviate (D): The ship deviates to the boundary of the traffic lane in a period, and has three Individuals, including Deviate to Starboard (DtoS), Deviate to Port (DtoP), and not Deviate (D). Deviate behavior can give the ship an early warning and guarantee the navigation safety.
- Should Turn to (STto): The right direction that the ship should turn to, with three Individuals including Should Turn to Starboard (STS), Should Turn to Port (STP), and Should Go Straight (SGS).
- is Safe (isS): The safety index in the traffic lane.
- deviate (d): The ship deviates to the boundary of the traffic lane at certain time.
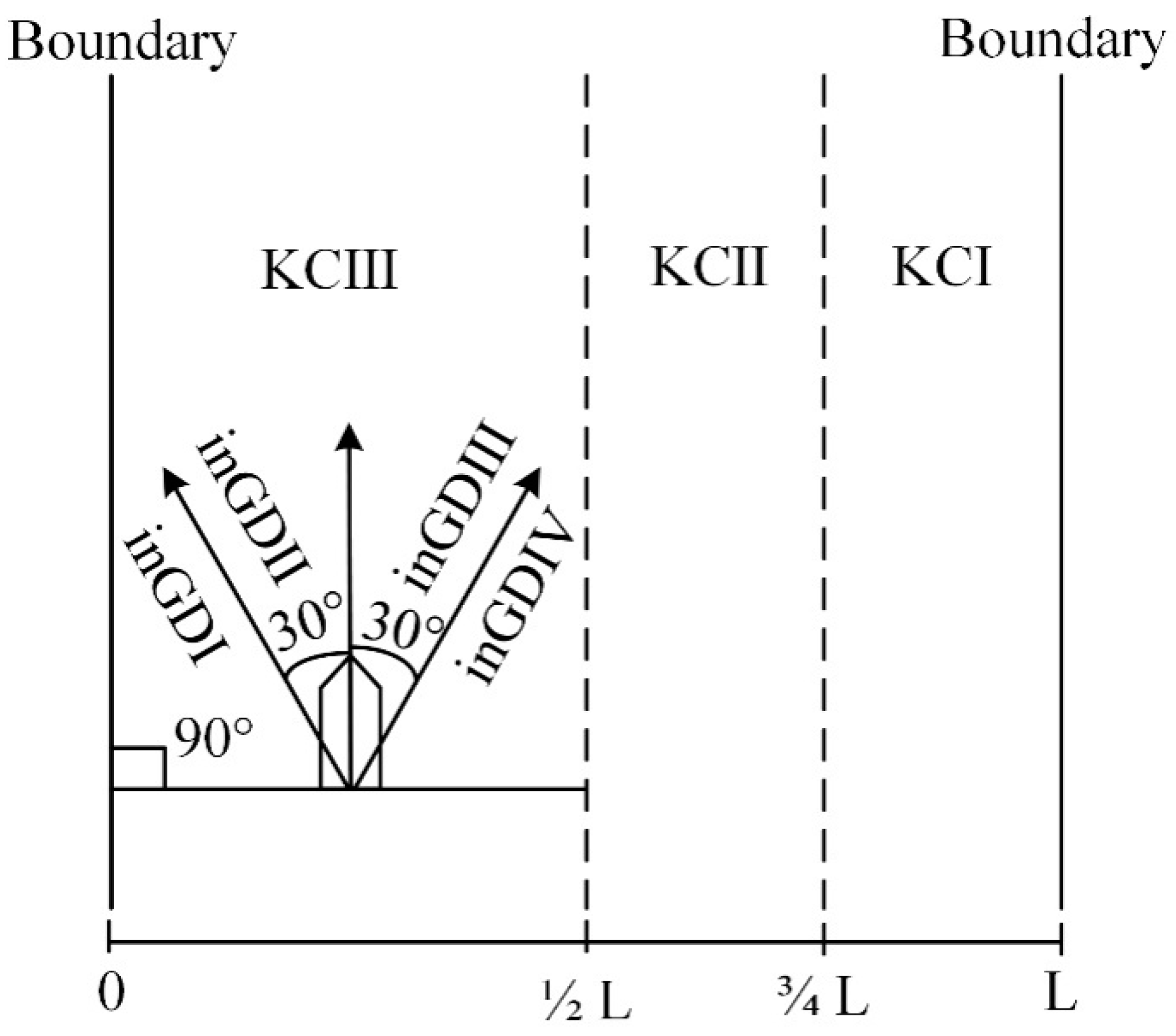
- in General Direction (inGD): The ship proceeds in the general direction of the traffic flow in the traffic lane (COLREGS rules 9 and 10), and it has four Individuals, which are in General Direction I–IV. It is used to check whether the ship is navigating along the traffic lane.
- Keep Clear (KC): The ship keeps a traffic separation line/zone clear in the traffic lane (COLREGS rules 9 and 10), and it has three Individuals, which are Keep Clear I–III. It is used to check whether there is enough space with the boundary of the traffic lane.
4. Recognition of State
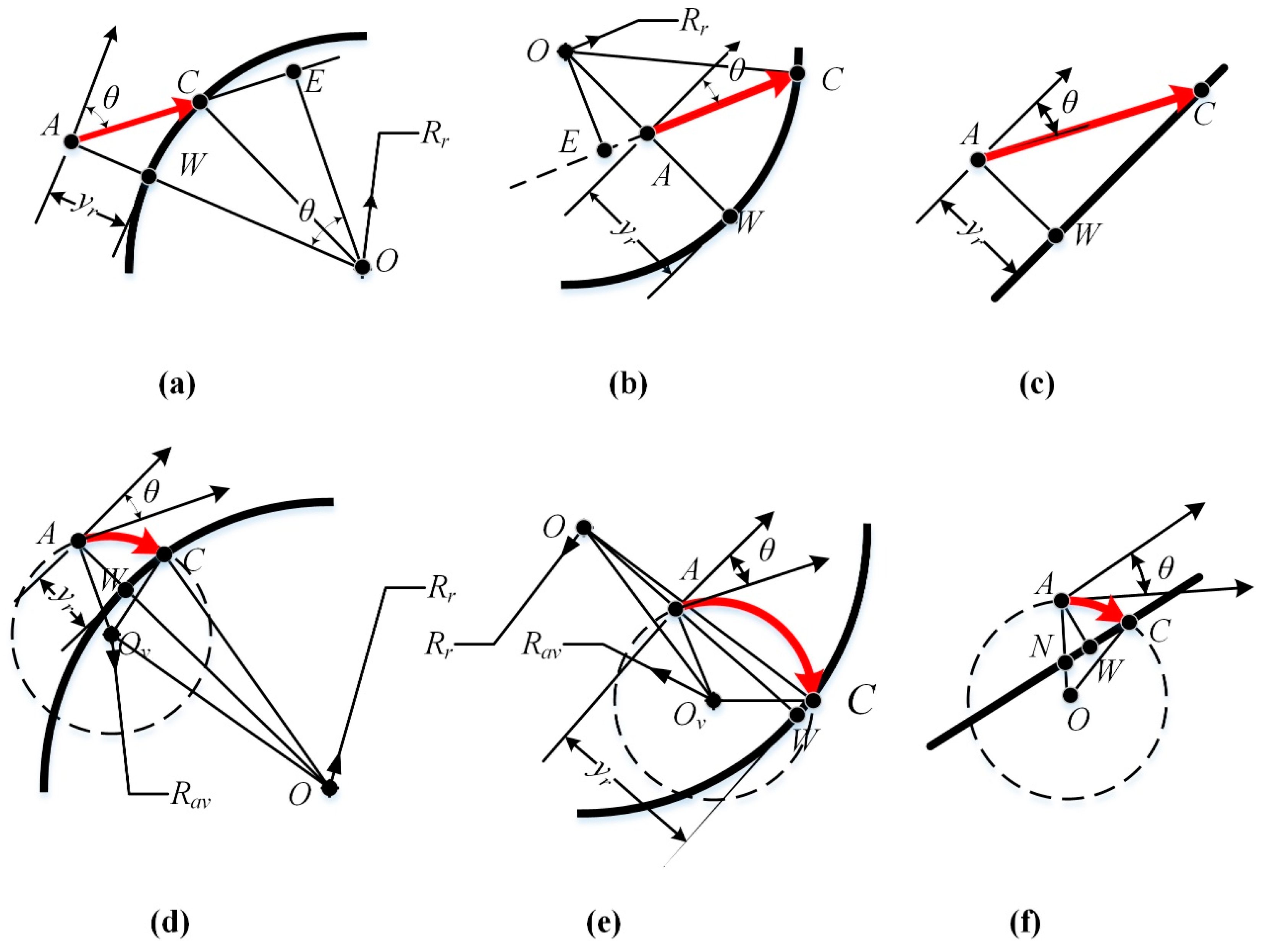
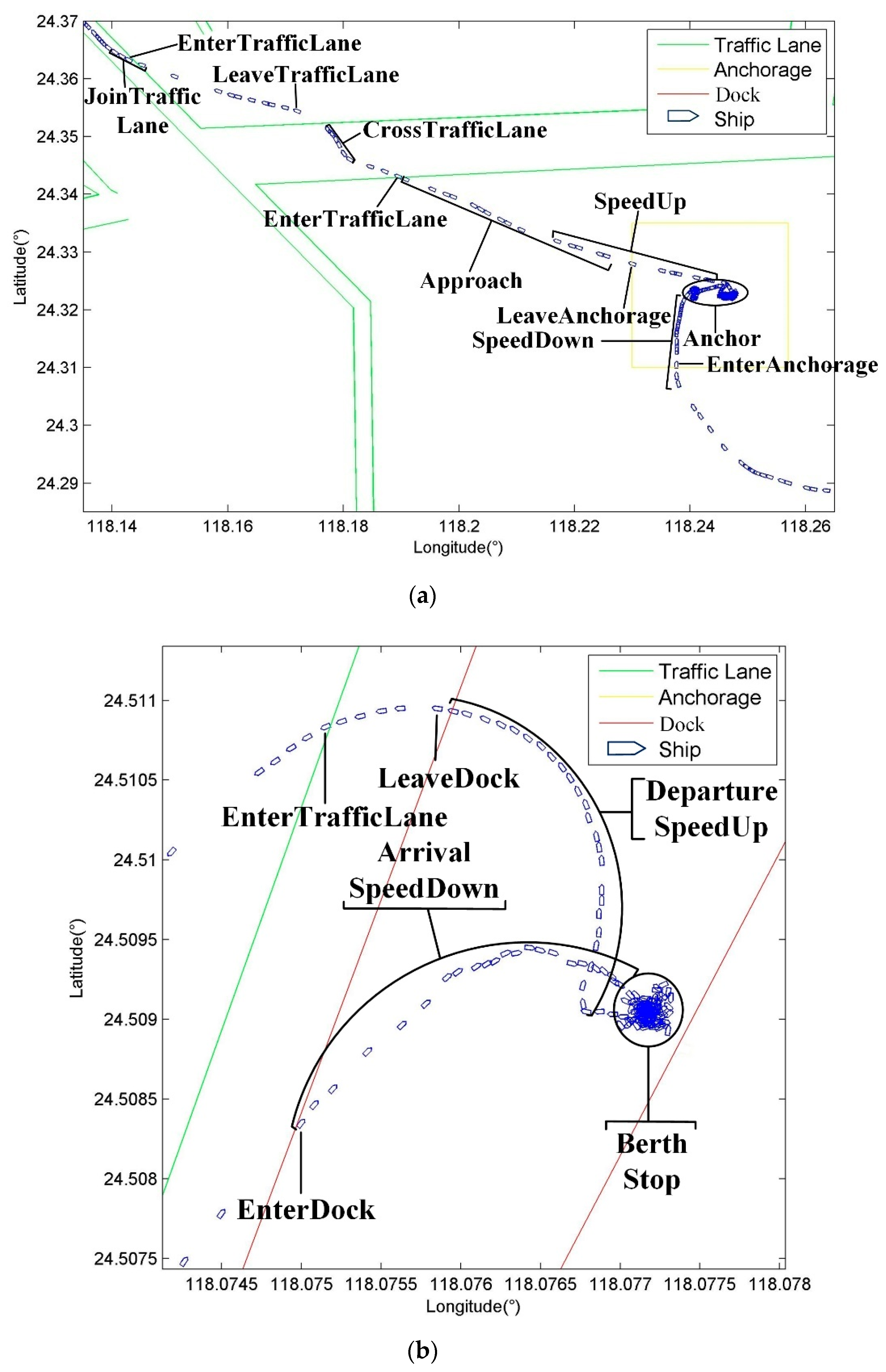
4.1. Recognition of States in General Scene, Dock and Anchorage
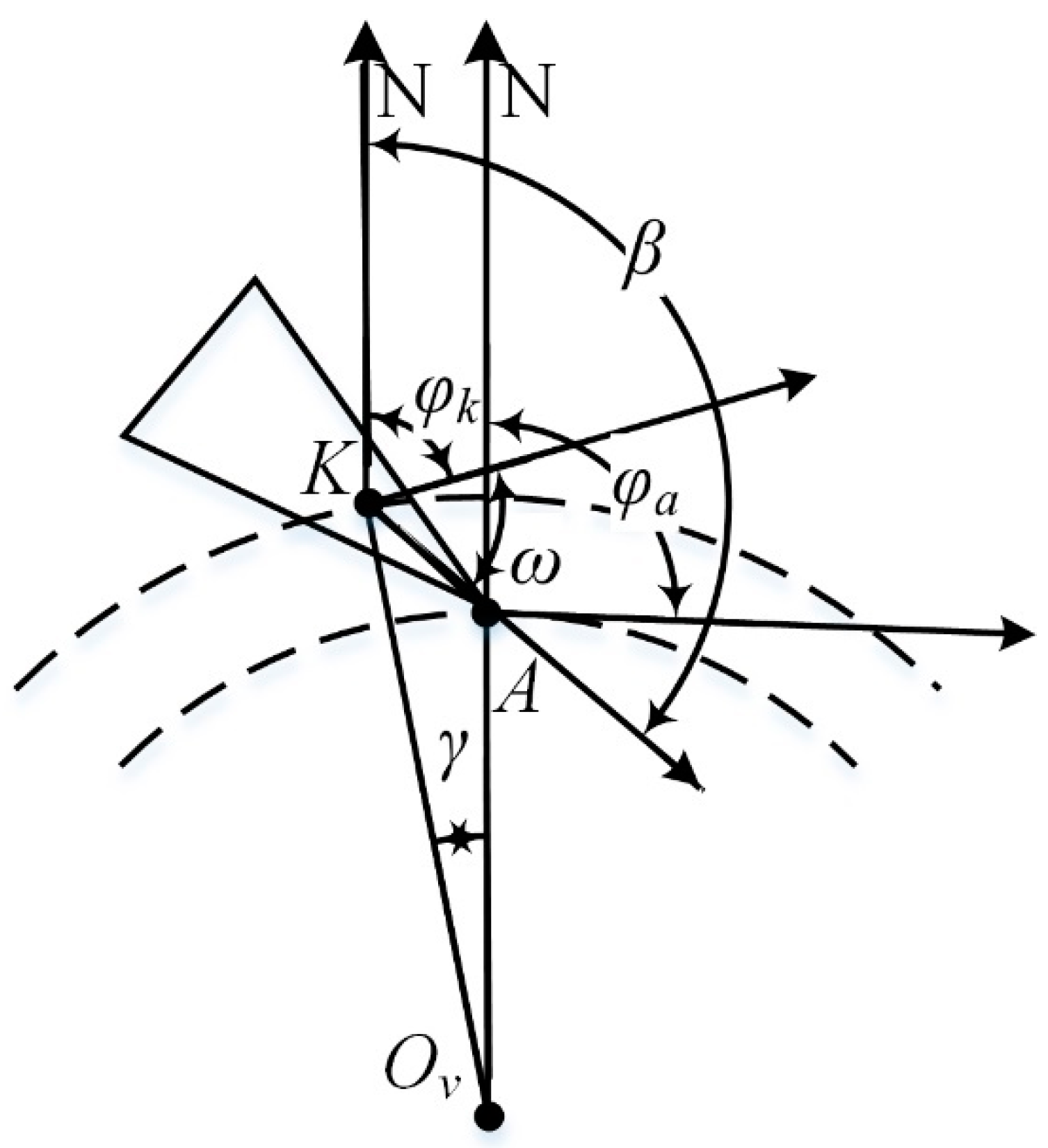
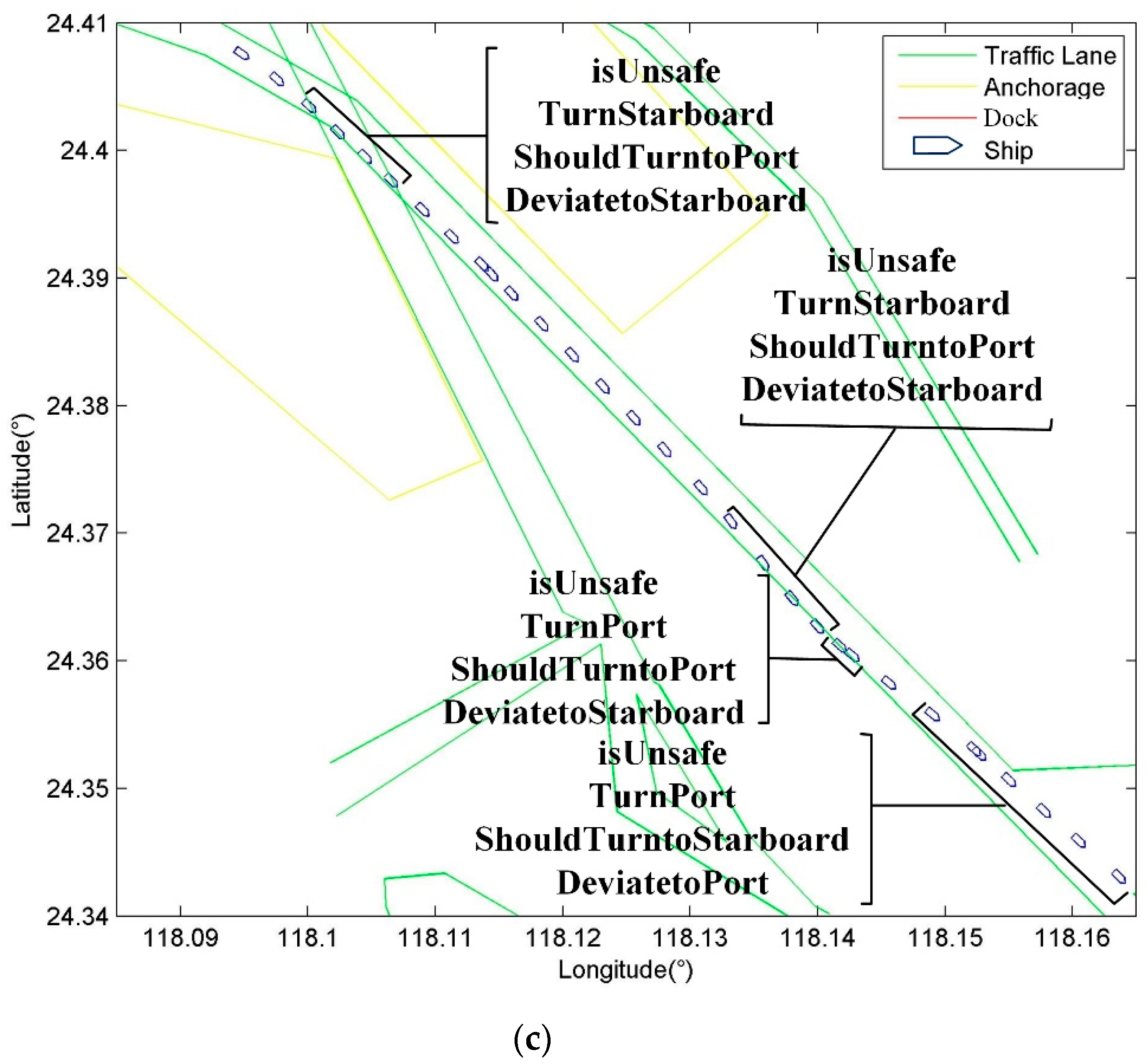
4.2. Recognition of States in Traffic Lanes
4.3. Mapping Recognised States to Semantic Network
5. Semantic Reasoning of Ship Behavior Using DBN
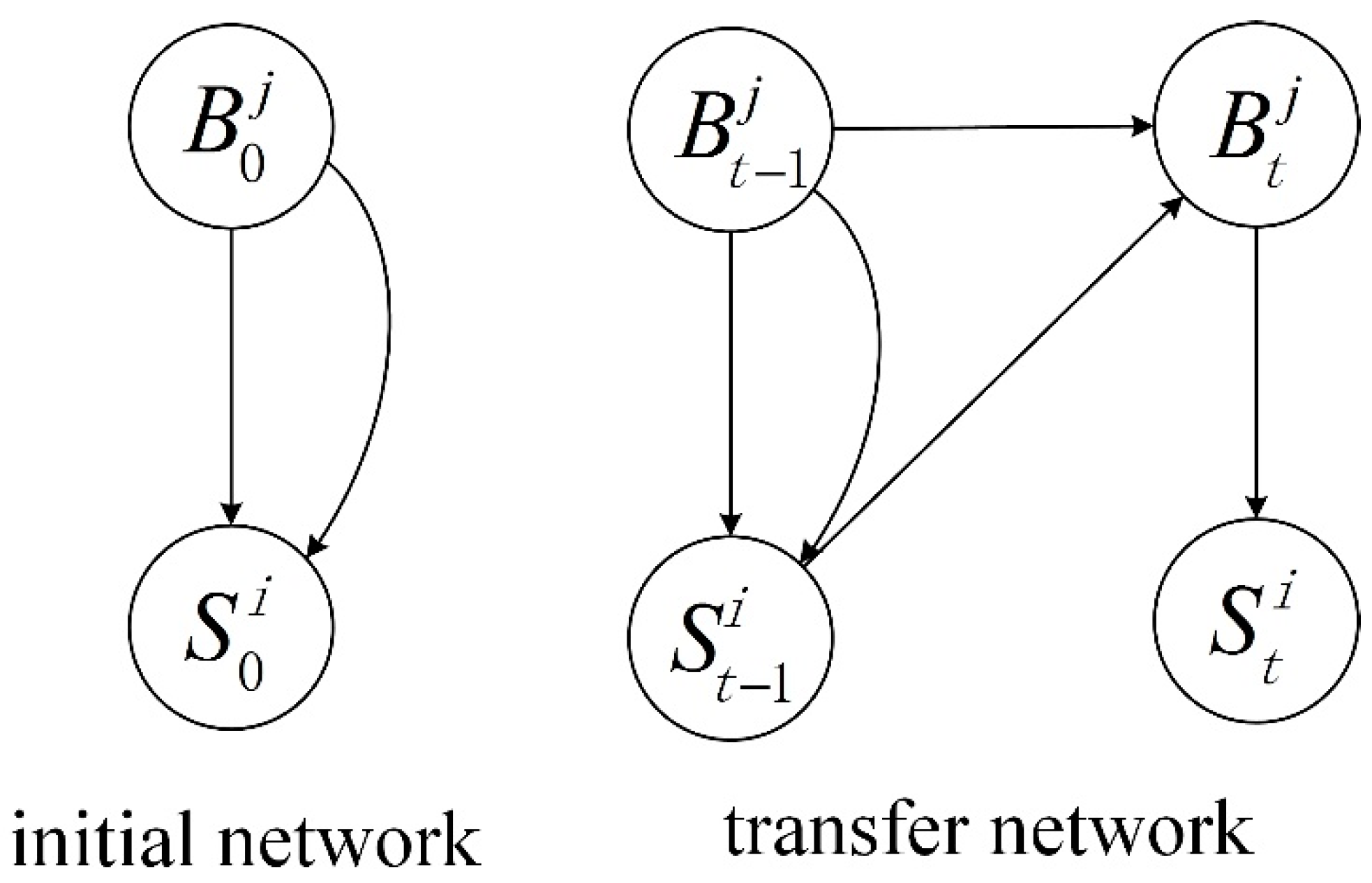
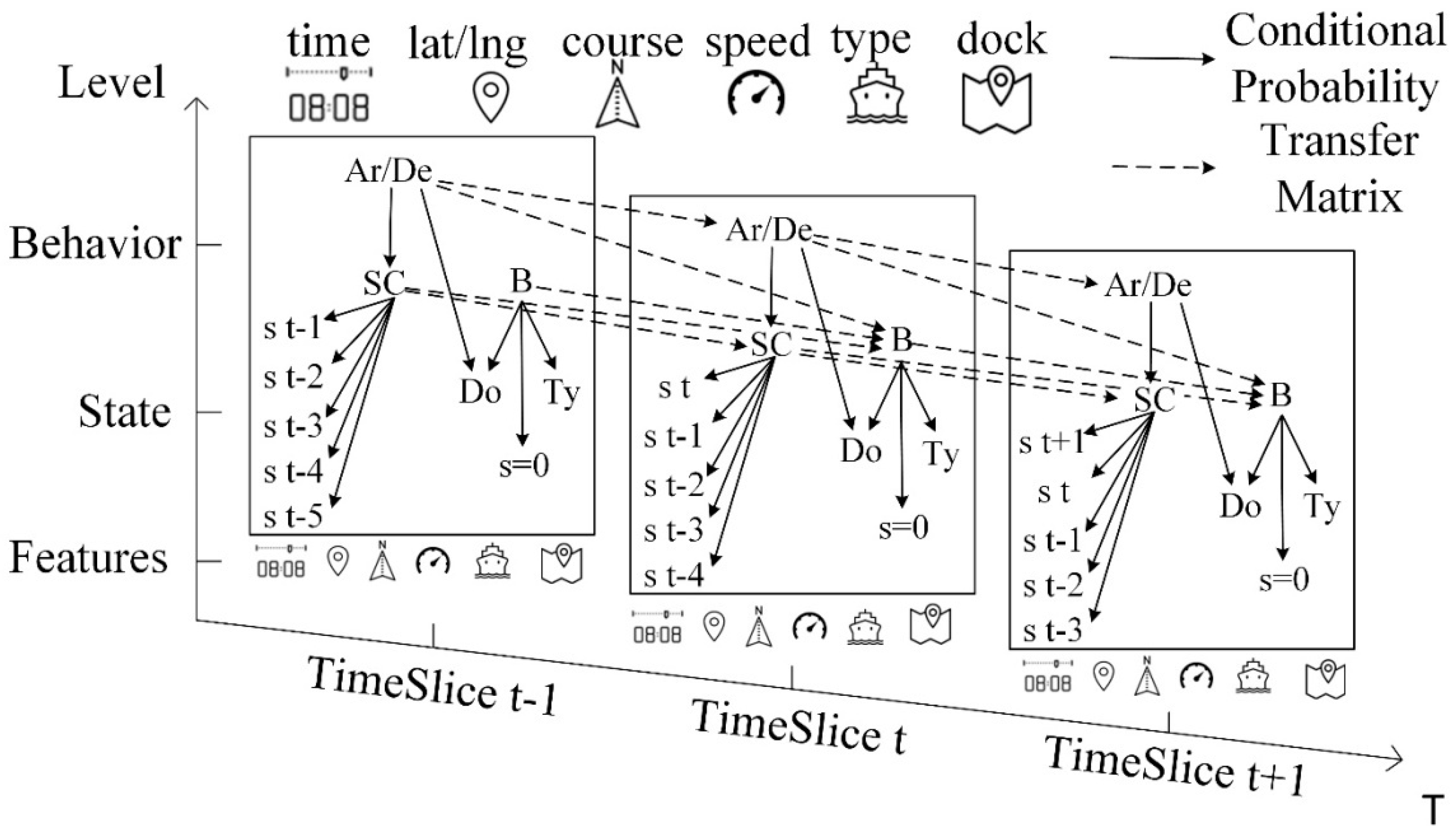
5.1. Definition of DBN
5.2. Parameter Learning
5.3. Dynamic Reasoning
5.4. Mapping Reasoned Behaviors to Semantic Network
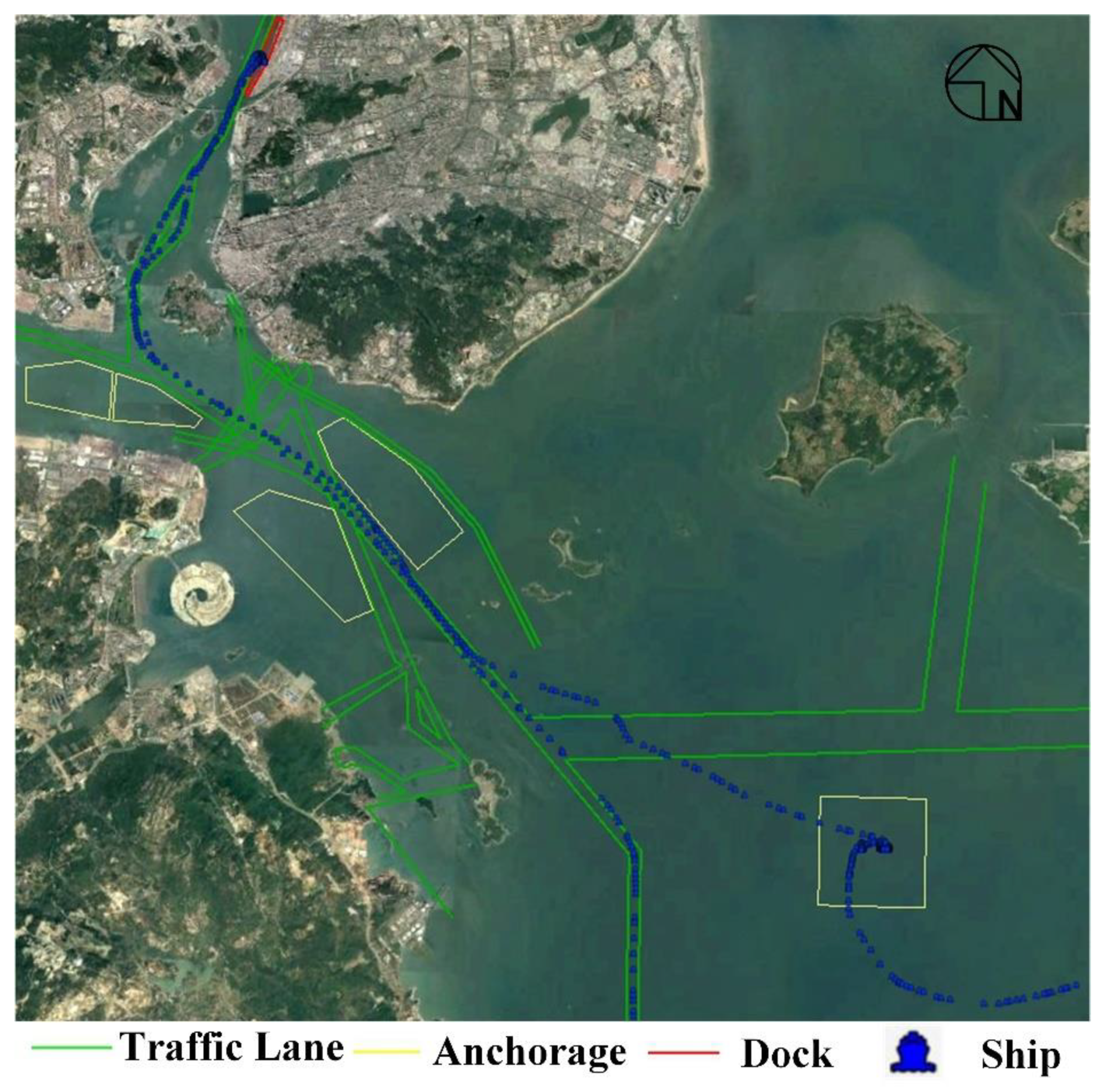
6. Application Examples
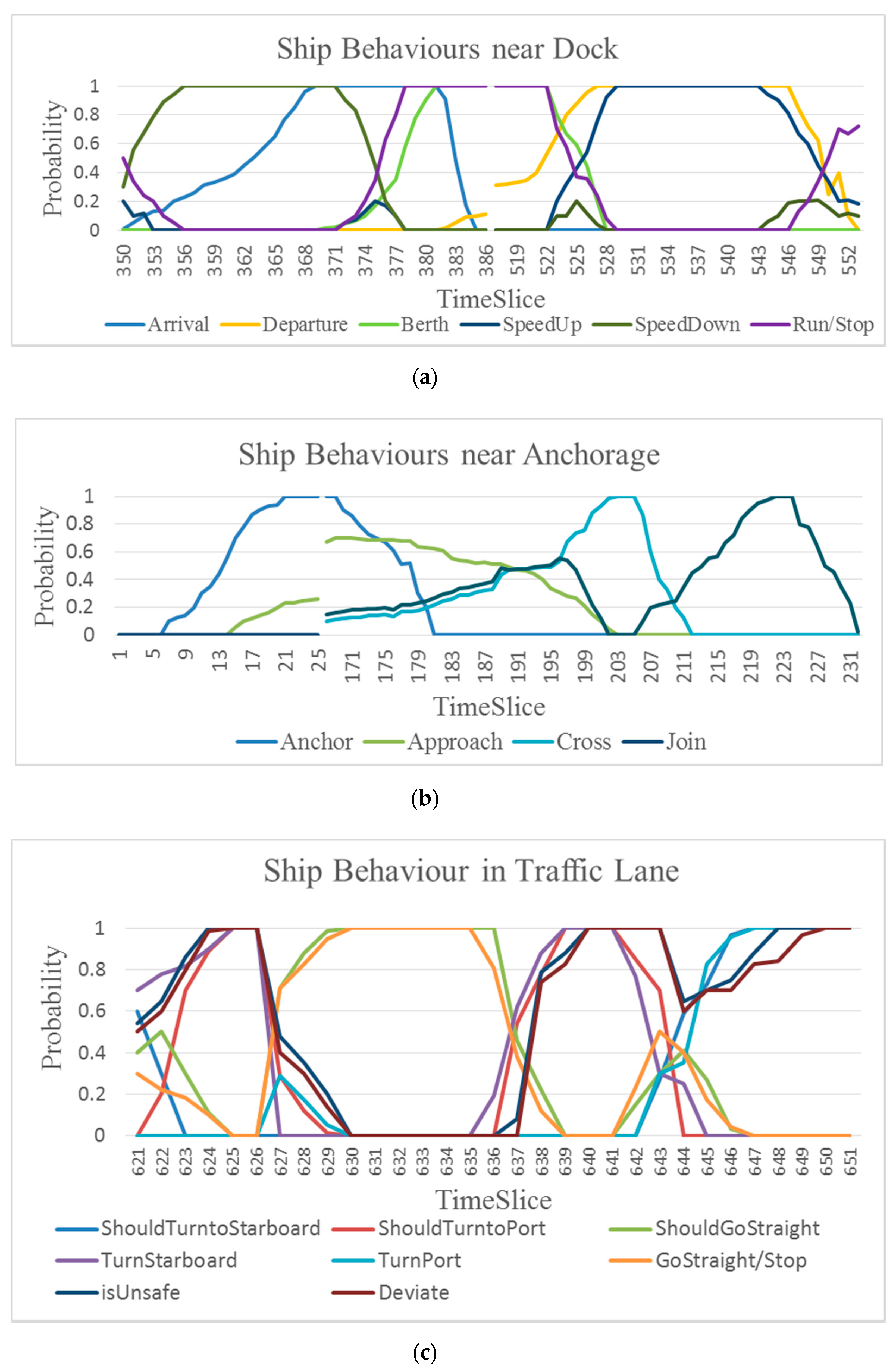
6.1. Reasoning of Behavior Using DBN
6.2. Semantic Query Using SPARQL
- FILTER query
| Prefix Ship Behavior: <http://www.semanticweb.org/ontology/ShipBehavior.owl/> SELECT ?x WHERE { ?x Ship Behavior: has Speed Change ?y FILTER REGEX(?y, Speed Up) }LIMIT 5 |
- OPTIONAL query
| Prefix Ship Behavior: <http://www.semanticweb.org/ontology/ShipBehavior.owl/> SELECT ?x ?y WHERE { ?x Ship Behavior: in Place Ship Behavior: Traffic Lane OPTIONAL (?x Ship Behavior: has Type ?y) } |
- Integrated query
| Prefix ShipBehavior: <http://www.semanticweb.org/ontology/ShipBehavior.owl/> SELECT ?Trajectory Segment ?Begin Time ?Dock WHERE { KUOTAI Ship Behavior: has Trajectory Segment ?Trajectory Segment. ?Dock rdf: type Ship Behavior: Dock. ?Trajectory Segment ShipBehavior: at Place ?Dock. ?Trajectory Segment Ship Behavior: at Begin Time ?Begin Time } |
- KUOTAI (Container) ends Anchor in No.3 anchorage at 2016-04-13T02:42:14+08:00 and begin Speed Up at 2016-04-13T02:44:54+08:00;
- KUOTAI (Container) is Approaching the Main Traffic Lane at 2016-04-13T02:49:23+08:00 and will Join or Cross the Main Traffic Lane.
- WARNING! KUOTAI (Container) is Unsafe in the Main Traffic Lane and Should Turn to Port because it is Deviate to Starboard at 2016-04-13T21:24:40 +08:00;
7. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbr. | Term | Abbr. | Term | Abbr. | Term |
|---|---|---|---|---|---|
| An | Anchor | I | Inter-Slice Influence | St | State |
| Anc | Anchorage | i | individual | STP | Should Turn to Port |
| Ap | Approach | inGD | in General Direction | STS | Should Turn to Starboard |
| Ar | Arrival | isS | is Safe | STto | Should Turn to |
| B | Behavior | isUns | is Unsafe | SU | Speed Up |
| Be | Berth | J | Join | sub | has subclass |
| BT | Begin Time | KC | Keep Clear | s = 0 | Speed = 0 |
| C | Characteristic | L | Leave | T | Time |
| Cr | Cross | P | Place | t | turning |
| D | Deviate | Pro | Probability | TL | Traffic Lane |
| d | deviate | RA | Right Angle | TP | Turn to Port |
| De | Departure | R/S | Run/Stop | TraP | Trajectory Point |
| Do | Dock | S | Ship | TraS | Trajectory Segment |
| DtoP | Deviate to Port | s | speed change | TS | Turn to Starboard |
References
- Vouros, G.A.; Doulkeridis, C.; Santipantakis, G.; Vlachou, A. Taming Big Maritime Data to Support Analytics. In Information Fusion and Intelligent Geographic Information Systems (IF&IGIS’17) ACM Computing Surveys (CSUR); Springer: Berlin/Heidelberg, Germany, 2018; pp. 15–27. [Google Scholar]
- Zhang, Y.; Wen, Y.; Zhang, F.; Zhou, C.; Du, L.; Huang, L.; Xiao, C. Semantic model of ship behaviour based on ontology engineering. J. Eng. 2018, 2018, 1746–1752. [Google Scholar] [CrossRef]
- Vandecasteele, A.; Devillers, R.; Napoli, A. From movement data to objects behavior using semantic trajectory and semantic events. Mar. Geod. 2014, 37, 126–144. [Google Scholar] [CrossRef]
- Zhu, F. Mining ship spatial trajectory patterns from AIS database for maritime surveillance. In Proceedings of the 2nd IEEE International Conference on Emergency Management and Management Sciences (ICEMMS), Beijing, China, 8–10 August 2011; pp. 772–775. [Google Scholar]
- Yang, X.; Zhang, Y.; Liu, W.; Zhu, F. Ship behavior recognition based on infrared video analysis in a maritime environment. In Proceedings of the 2015 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015; pp. 80–84. [Google Scholar]
- Da Silva, M.C.T.; Times, V.C.; de Macêdo, J.A.; Renso, C. SWOT: A conceptual data warehouse model for semantic trajectories. In Proceedings of the ACM Eighteenth International Workshop on Data Warehousing and OLAP, Melbourne, VIC, Australia, 19–23 October 2015; pp. 11–14. [Google Scholar]
- Van Hage, W.R.; Malaisé, V.; de Vries, G.K.; Schreiber, G.; van Someren, M.W. Abstracting and reasoning over ship trajectories and web data with the Simple Event Model (SEM). Multimedia Tools Appl. 2012, 57, 175–197. [Google Scholar] [CrossRef]
- Bogorny, V.; Avancini, H.; de Paula, B.C.; Kuplich, C.R.; Alvares, L.O. Weka-STPM: A Software Architecture and Prototype for Semantic Trajectory Data Mining and Visualization. Trans. GIS 2011, 15, 227–248. [Google Scholar] [CrossRef]
- Wang, Y.; McArthur, D. Enhancing data privacy with semantic trajectories: A raster-based framework for GPS stop/move management. Trans. GIS 2018, 22, 975–990. [Google Scholar] [CrossRef]
- Santipantakis, G.M.; Glenis, A.; Patroumpas, K.; Vlachou, A.; Doulkeridis, C.; Vouros, G.A.; Pelekis, N.; Theodoridis, Y. SPARTAN: Semantic integration of big spatio-temporal data from streaming and archival sources. Future Gener. Comput. Syst. 2018, in press. [Google Scholar] [CrossRef]
- Buechel, M.; Hinz, G.; Ruehl, F.; Schroth, H.; Gyoeri, C.; Knoll, A. Ontology-based traffic scene modeling, traffic regulations dependent situational awareness and decision-making for automated vehicles. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017; pp. 1471–1476. [Google Scholar]
- Rajput, Q.; Haider, S. BNOSA: A Bayesian network and ontology based semantic annotation framework. Web. Semant. 2011, 9, 99–112. [Google Scholar] [CrossRef]
- Guo, K.; Liang, Z.; Tang, Y.; Chi, T. SOR: An optimized semantic ontology retrieval algorithm for heterogeneous multimedia big data. J. Comput. Sci. 2018, 28, 455–465. [Google Scholar] [CrossRef]
- Lane, R.O.; Nevell, D.A.; Hayward, S.D.; Beaney, T.W. Maritime anomaly detection and threat assessment. In Proceedings of the 13th Conference on Information Fusion (FUSION), Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar]
- Castaldo, F.; Palmieri, F.A.; Bastani, V.; Marcenaro, L.; Regazzoni, C. Abnormal vessel behavior detection in port areas based on dynamic bayesian networks. In Proceedings of the 2014 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–7. [Google Scholar]
- Lei, P.-R. A framework for anomaly detection in maritime trajectory behavior. Knowl. Inf. Syst. 2016, 47, 189–214. [Google Scholar] [CrossRef]
- Parent, C.; Spaccapietra, S.; Renso, C.; Andrienko, G.; Andrienko, N.; Bogorny, V.; Damiani, M.L.; Gkoulalas-Divanis, A.; Macedo, J.; Pelekis, N. Semantic trajectories modeling and analysis. ACM Comput. Surv. (CSUR) 2013, 45, 42. [Google Scholar] [CrossRef]
- Yan, Z.; Chakraborty, D.; Parent, C.; Spaccapietra, S.; Aberer, K. Semantic trajectories: Mobility data computation and annotation. ACM Trans. Intell. Syst. Technol. 2013, 4, 49. [Google Scholar] [CrossRef]
- Bogorny, V.; Renso, C.; de Aquino, A.R.; de Lucca Siqueira, F.; Alvares, L.O. Constant—A conceptual data model for semantic trajectories of moving objects. Trans. GIS 2014, 18, 66–88. [Google Scholar] [CrossRef]
- Junior, A.S.; Times, V.C.; Renso, C.; Matwin, S.; Cabral, L.A. A semi-supervised approach for the semantic segmentation of trajectories. In Proceedings of the 2018 19th IEEE International Conference on Mobile Data Management (MDM), Aalborg, Denmark, 26–28 June 2018; pp. 145–154. [Google Scholar]
- Ilarri, S.; Stojanovic, D.; Ray, C. Semantic management of moving objects: A vision towards smart mobility. Expert. Syst. Appl. 2015, 42, 1418–1435. [Google Scholar] [CrossRef]
- Ruback, L.; Casanova, M.A.; Raffaetà, A.; Renso, C.; Vidal, V. Enriching mobility data with linked open data. In Proceedings of the 20th International Database Engineering & Applications Symposium, Montreal, QC, Canada, 11–13 July 2016; pp. 173–182. [Google Scholar]
- Yuan, Q.; Zhang, C.; Han, J. A Survey on Spatiotemporal and Semantic Data Mining. In Trends in Spatial Analysis and Modelling; Martin, B., Gotthard, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 43–57. [Google Scholar]
- De Graaff, V.; de By, R.A.; van Keulen, M. Automated semantic trajectory annotation with indoor point-of-interest visits in urban areas. In Proceedings of the 31st Annual ACM Symposium on Applied Computing, Pisa, Italy, 4–8 April 2016; pp. 552–559. [Google Scholar]
- Nogueira, T.P. A Framework for Automatic Annotation of Semantic Trajectories. Ph.D. Thesis, Université Grenoble Alpes, Saint-Martin-d’Hères, France, 2017. [Google Scholar]
- Baglioni, M.; de Macêdo, J.A.F.; Renso, C.; Trasarti, R.; Wachowicz, M. Towards semantic interpretation of movement behavior. In Advances in GIScience; Sester, M., Bernard, L., Paelke, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 271–288. [Google Scholar]
- Brüggemann, S.; Bereta, K.; Xiao, G.; Koubarakis, M. Ontology-based data access for maritime security. In Proceedings of the 15th International Semantic Web Conference, Kobe, Japan, 17–21 October 2016; pp. 741–757. [Google Scholar]
- Dividino, R.; Soares, A.; Matwin, S.; Isenor, A.W.; Webb, S.; Brousseau, M. Semantic integration of real-time heterogeneous data streams for ocean-related decision making. In Proceedings of the Big Data and Artificial Intelligence for Military Decision Making, Bordeaux, France, 30 May–1 June 2018. [Google Scholar]
- Santipantakis, G.; Kotis, K.I.; Vouros, G.A. Ontology-based data sources’ integration for maritime event recognition. In Proceedings of the 2015 6th International Conference on Information, Intelligence, Systems and Applications (IISA), Corfu, Greece, 6–8 July 2015; pp. 1–6. [Google Scholar]
- Claramunt, C.; Ray, C.; Salmon, L.; Camossi, E.; Hadzagic, M.; Jousselme, A.-L.; Andrienko, G.; Andrienko, N.; Theodoridis, Y.; Vouros, G. Maritime data integration and analysis: Recent progress and research challenges. In Proceedings of the Advances in Database Technology-EDBT, Venice, Italy, 21–24 March 2017; pp. 192–197. [Google Scholar]
- Sowa, J.F. Semantic networks. In Encyclopedia of Cognitive Science; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Horridge, M.; Bechhofer, S. The owl API: A java API for owl ontologies. Semant. Web 2011, 2, 11–21. [Google Scholar]
- Hahmann, S.; Burghardt, D. Connecting linkedgeodata and geonames in the spatial semantic web. In Proceedings of the 6th International GIScience Conference, Zurich, Switzerland, 14–17 September 2010. [Google Scholar]
- Mishra, R.B.; Kumar, S. Semantic web reasoners and languages. Artif. Intell. Rev. 2011, 35, 339–368. [Google Scholar] [CrossRef]
- Chang, Y.-S.; Fan, C.-T.; Lo, W.-T.; Hung, W.-C.; Yuan, S.-M. Mobile cloud-based depression diagnosis using an ontology and a Bayesian network. Future Gener. Comput. Syst. 2015, 43, 87–98. [Google Scholar] [CrossRef]
- Arsene, O.; Dumitrache, I.; Mihu, I. Medicine expert system dynamic Bayesian Network and ontology based. Expert Syst. Appl. 2011, 38, 15253–15261. [Google Scholar] [CrossRef]
- Harris, S.; Seaborne, A.; Prud’hommeaux, E. SPARQL 1.1 Query Language; World Wide Web Consortium: Cambridge, MA, USA, 2013. [Google Scholar]















| Name | Type | Flag | Deadweight | Length Overall × Breadth Extreme |
|---|---|---|---|---|
| KUOTAI | Container | Panama | 18,595 t | 168.8 m × 27.3 m |
| Time Stamp | MMSI | Latitude (°) | Longitude (°) | Heading (°) | Speed (kn) | COG (°) |
|---|---|---|---|---|---|---|
| 1460493583 | 371625000 | 24.30168 | 118.2417 | 325.2 | 9.8 | 329 |
| 1460493623 | 371625000 | 24.30317 | 118.2406 | 325 | 9.4 | 330 |
| 1460493743 | 371625000 | 24.30727 | 118.238 | 342.4 | 7.8 | 355 |
| 1460493783 | 371625000 | 24.30863 | 118.2377 | 352.6 | 7.2 | 5 |
| 1460493843 | 371625000 | 24.31055 | 118.2377 | 0.4 | 6.7 | 6 |
| P(B) | P(Tu) | P(E/L) | P(Ar/De) | P(STto) | |||||
|---|---|---|---|---|---|---|---|---|---|
| B | 0.53 | TS | 0.33 | E | 0.01 | A | 0.03 | STS | 0.33 |
| TP | 0.32 | L | 0.01 | D | 0.03 | ST | 0.33 | ||
| B | 0.47 | ||||||||
| GS/S | 0.34 | EandL | 0.98 | AandD | 0.94 | SR | 0.34 | ||
| P(inGD|isS, STto) | inGDI | inGDII | inGDIII | inGDIV | |
|---|---|---|---|---|---|
| isUns | STS | 0.70 | 0.25 | 0.03 | 0.02 |
| STP | 0.02 | 0.04 | 0.23 | 0.71 | |
| SR | 0.05 | 0.45 | 0.44 | 0.06 | |
| isS | STS | 0.45 | 0.37 | 0.17 | 0.01 |
| STP | 0.01 | 0.14 | 0.34 | 0.51 | |
| SR | 0.01 | 0.49 | 0.49 | 0.01 |
| P(KC|isS, STto) | KCI | KCII | KCIII | |
|---|---|---|---|---|
| isUns | STS | 0.03 | 0.20 | 0.77 |
| STP | 0.68 | 0.21 | 0.11 | |
| SR | 0.70 | 0.27 | 0.03 | |
| isS | STS | 0.07 | 0.21 | 0.72 |
| STP | 0.75 | 0.23 | 0.02 | |
| SR | 0.76 | 0.23 | 0.01 |
| P(i/o|E/L) | inΛin | inΛout | outΛout | outΛin |
|---|---|---|---|---|
| E | 0 | 0 | 0 | 1 |
| L | 0 | 1 | 0 | 0 |
| EandL | 0.13 | 0 | 0.87 | 0 |
| STS | 0.98 | 0.01 | 0.01 | ||
| 0.79 | 0.11 | 0.10 | |||
| STP | 0.72 | 0.25 | 0.03 | ||
| 0.69 | 0.22 | 0.09 | |||
| SR | 0.45 | 0.09 | 0.46 | ||
| 0.44 | 0.12 | 0.44 | |||
| STS | 0.30 | 0.65 | 0.05 | ||
| 0.23 | 0.75 | 0.02 | |||
| STP | 0.03 | 0.92 | 0.05 | ||
| 0.06 | 0.81 | 0.13 | |||
| SR | 0.23 | 0.44 | 0.33 | ||
| 0.12 | 0.54 | 0.34 | |||
| STS | 0.23 | 0.14 | 0.63 | ||
| 0.16 | 0.17 | 0.67 | |||
| STP | 0.02 | 0.18 | 0.80 | ||
| 0.02 | 0.17 | 0.81 | |||
| SR | 0.03 | 0.03 | 0.94 | ||
| 0.06 | 0.04 | 0.90 |
| 0.90 | 0.10 | ||
| 0.81 | 0.19 | ||
| 0.13 | 0.87 | ||
| 0.11 | 0.89 | ||
| Area | Behavior | Number | Proportion |
|---|---|---|---|
| Anchorage | Anchor | 517 | 3.07% |
| Approach | 504 | 3.00% | |
| Join | 347 | 2.06% | |
| Cross | 157 | 0.93% | |
| Dock | Berth | 526 | 3.13% |
| Arrival | 521 | 3.10% | |
| Departure | 519 | 3.09% | |
| Traffic Lane | Deviate | 897 | 5.34% |
| is Unsafe | 925 | 5.50% | |
| Should Turn to | 925 | 5.50% | |
| General Scene | Turning | 3987 | 23.72% |
| Speed Change | 4609 | 27.42% | |
| Enter/Leave | 2376 | 14.13% |
| Models | Behaviors | Reasoning | Query | |||
|---|---|---|---|---|---|---|
| General Scene | Dock | Anchorage | Traffic Lane | |||
| SEM [7] | No | Limited | No | Limited | No | Yes |
| RMSAS [21] | No | No | No | Limited | No | Yes |
| datAcron [1] | No | No | No | Yes | No | No |
| SMSB | Yes | Yes | Yes | Yes | Yes | Yes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, Y.; Zhang, Y.; Huang, L.; Zhou, C.; Xiao, C.; Zhang, F.; Peng, X.; Zhan, W.; Sui, Z. Semantic Modelling of Ship Behavior in Harbor Based on Ontology and Dynamic Bayesian Network. ISPRS Int. J. Geo-Inf. 2019, 8, 107. https://doi.org/10.3390/ijgi8030107
Wen Y, Zhang Y, Huang L, Zhou C, Xiao C, Zhang F, Peng X, Zhan W, Sui Z. Semantic Modelling of Ship Behavior in Harbor Based on Ontology and Dynamic Bayesian Network. ISPRS International Journal of Geo-Information. 2019; 8(3):107. https://doi.org/10.3390/ijgi8030107
Chicago/Turabian StyleWen, Yuanqiao, Yimeng Zhang, Liang Huang, Chunhui Zhou, Changshi Xiao, Fan Zhang, Xin Peng, Wenqiang Zhan, and Zhongyi Sui. 2019. "Semantic Modelling of Ship Behavior in Harbor Based on Ontology and Dynamic Bayesian Network" ISPRS International Journal of Geo-Information 8, no. 3: 107. https://doi.org/10.3390/ijgi8030107
APA StyleWen, Y., Zhang, Y., Huang, L., Zhou, C., Xiao, C., Zhang, F., Peng, X., Zhan, W., & Sui, Z. (2019). Semantic Modelling of Ship Behavior in Harbor Based on Ontology and Dynamic Bayesian Network. ISPRS International Journal of Geo-Information, 8(3), 107. https://doi.org/10.3390/ijgi8030107