Extraction of Terrain Feature Lines from Elevation Contours Using a Directed Adjacent Relation Tree

Abstract
:1. Introduction
- Geometric calculation method [13,14,15]: The inclusion relationships between the areas contained by contour lines are calculated to determine the “parent–child” hierarchies of the contours, which are subsequently used to identify contour adjacencies. Methods of this type are intuitive and easy to understand; however, they are unsuitable for maps that contain open contour lines.
- Voronoi diagrams method [16]: Contour adjacent relations are identified through the first-order adjacencies of the contour line Voronoi diagram.
- Delaunay triangulation method [17,18]: The edges of the triangles generated in Delaunay triangulation can also be used to identify adjacencies between contour lines. However, owing to the nested nature of the contours, the triangles generated from individual contour lines will cross the adjacent contours, which can lead to erroneous adjacent relation judgments. Poorten and Jones [17] proposed recognizing contour adjacencies based on constrained Delaunay triangulation, which effectively prevents the triangles from crossing polygons, thus ensuring the accuracy of contour adjacent relation judgments.
- As Voronoi diagrams and constrained Delaunay triangulation are not affected by open contour lines, these methods are widely applicable for the judgment of contour adjacencies. However, both methods are inefficient when processing contours over a large area because they consume large amounts of time during spatial meshing computations and searches for associated contour pairs.
- Region expansion method [19]: The region expansion method operates under the following premise. As contour lines expand, the intersection of the expanded boundaries with other contour lines indicates that the intersecting contour lines are adjacent to each other. This method does not rely on the elevation of a contour, but if an area contains open contour lines, the judgment of adjacent relations using this method is susceptible to errors.
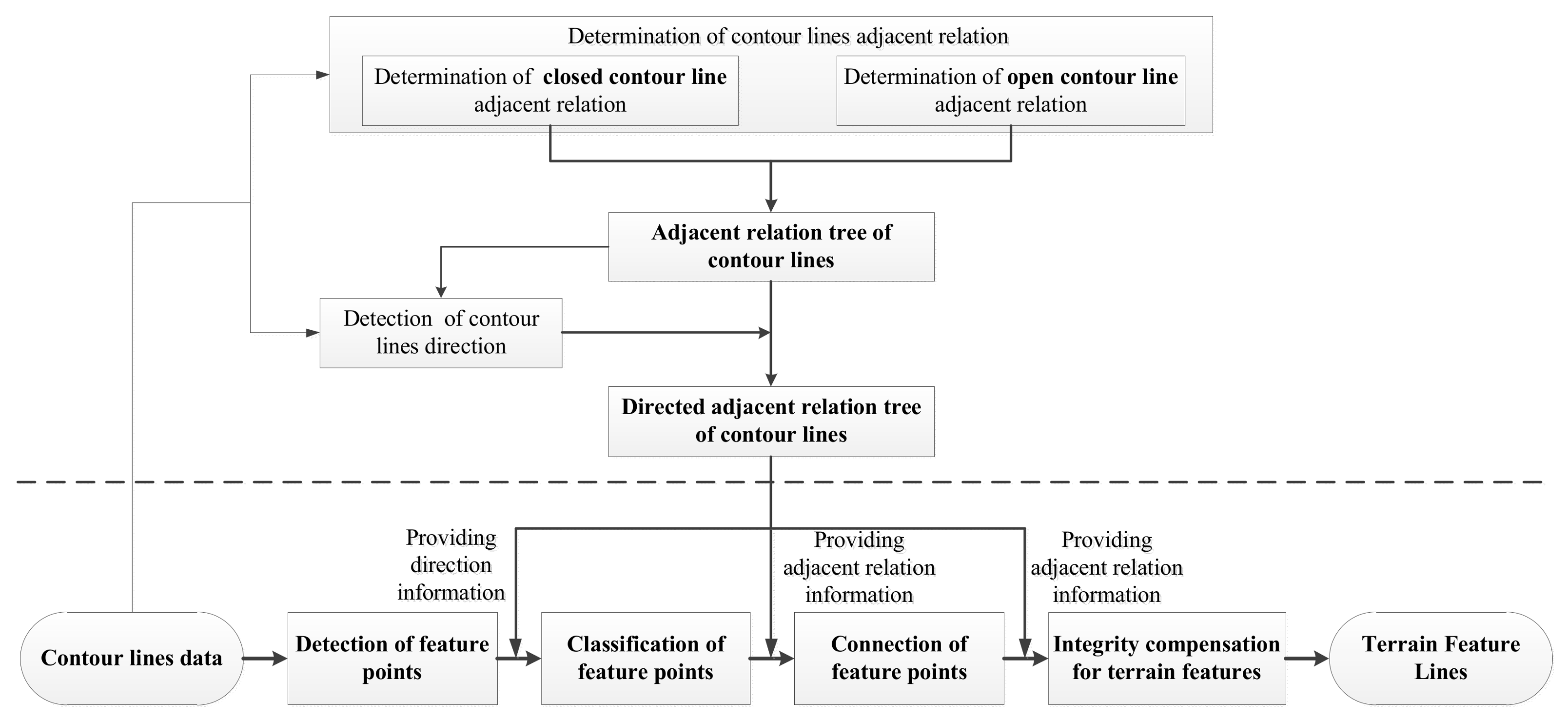
2. Framework for Terrain Feature Line Extraction Method
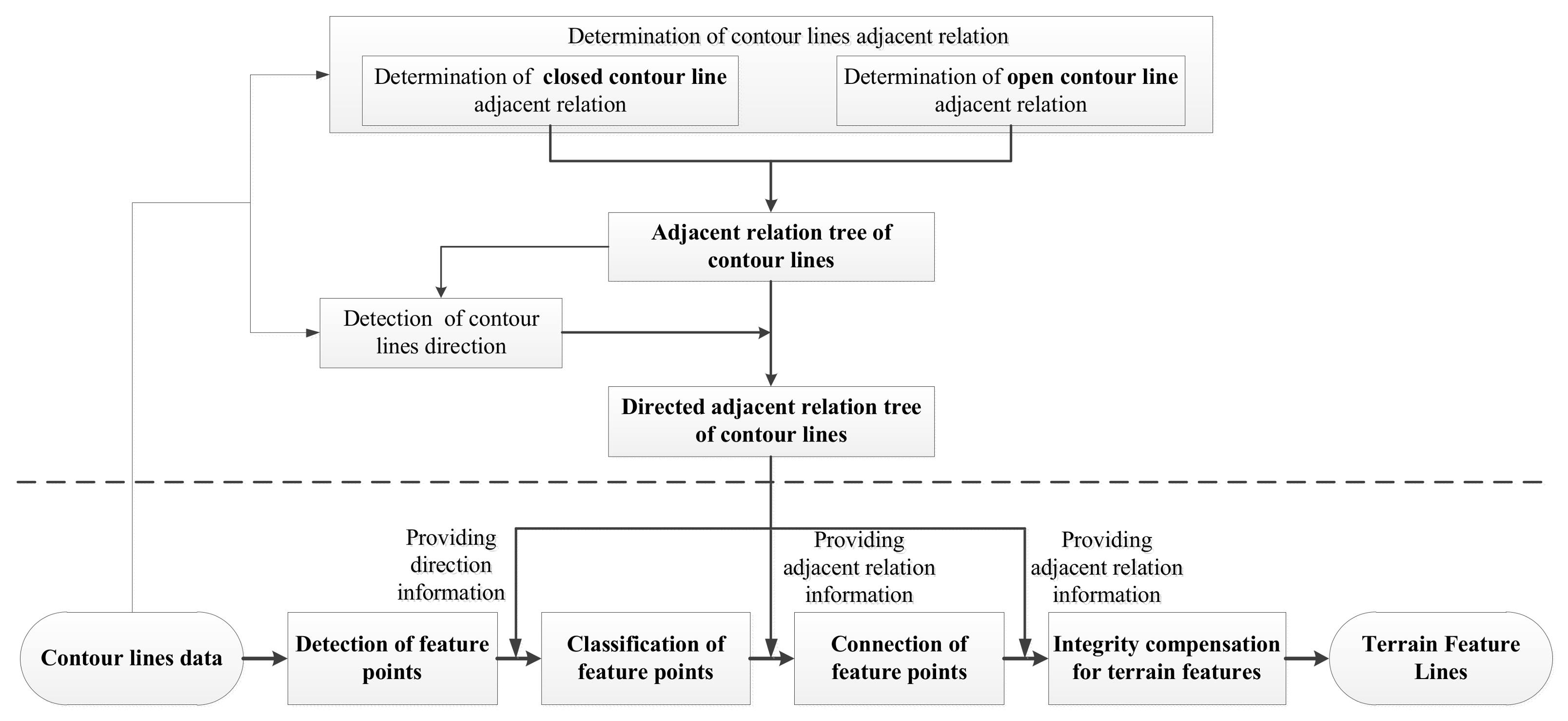
- (1)
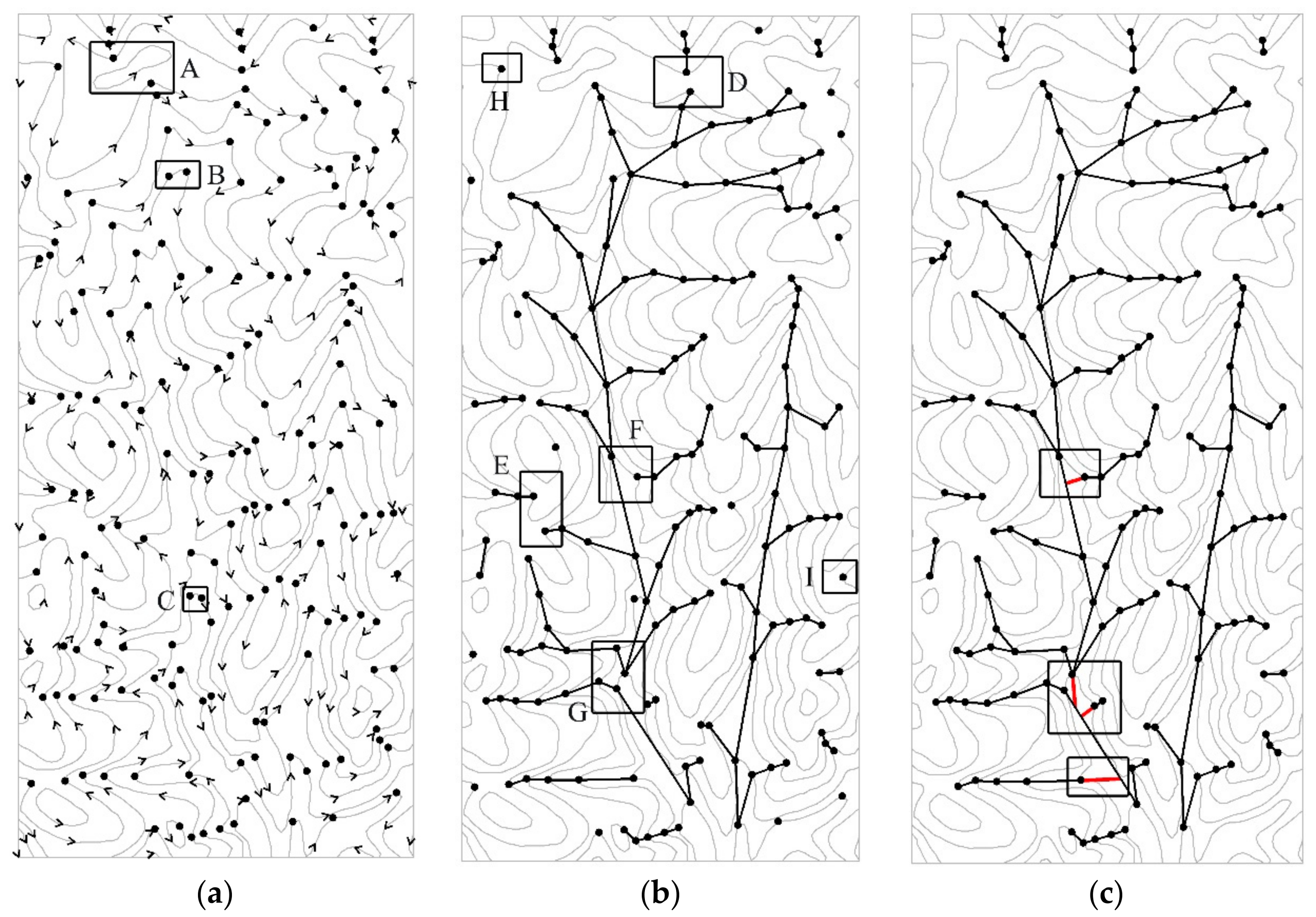
- Detect feature points using the D–P algorithm.
- (2)
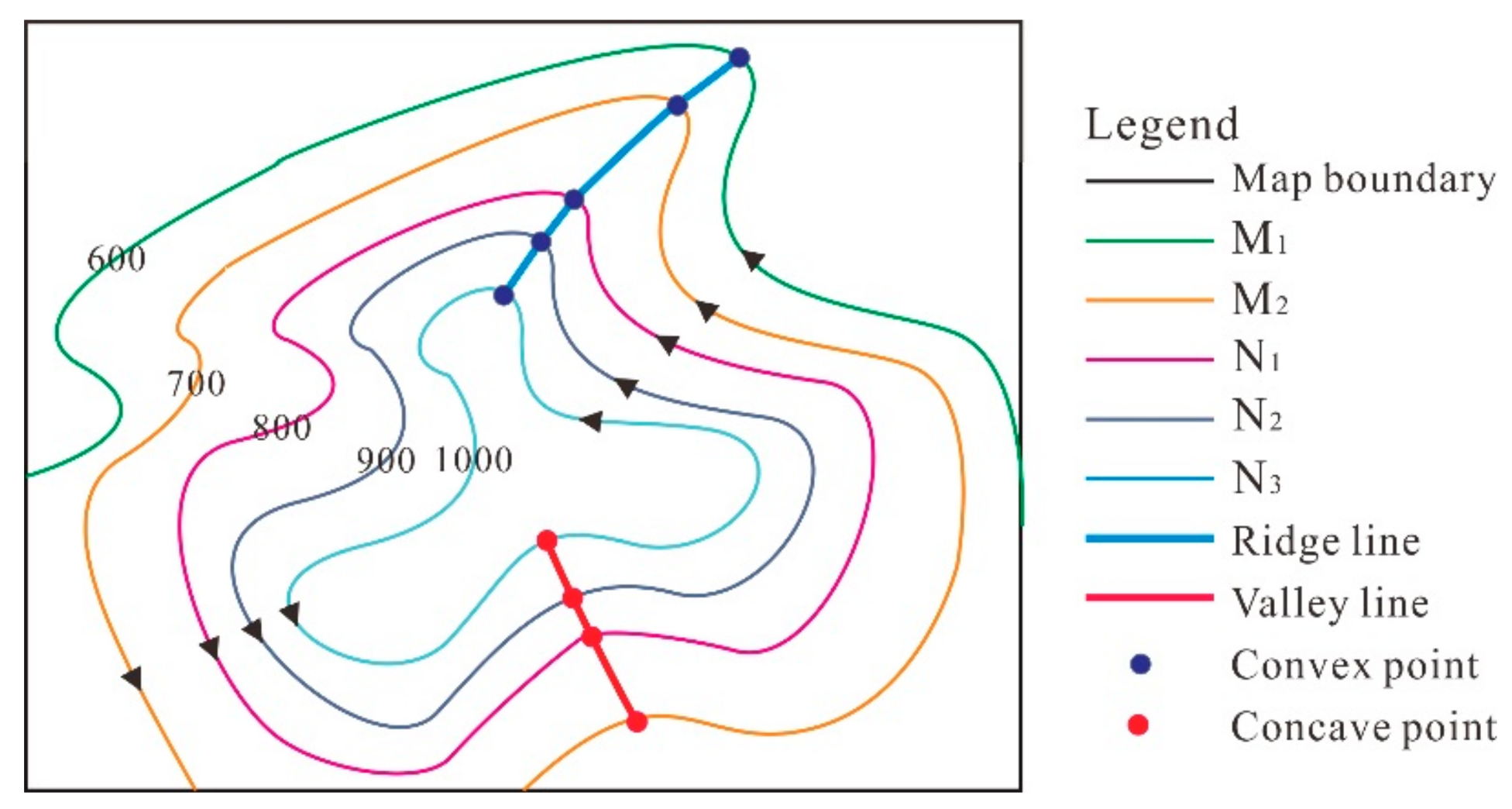
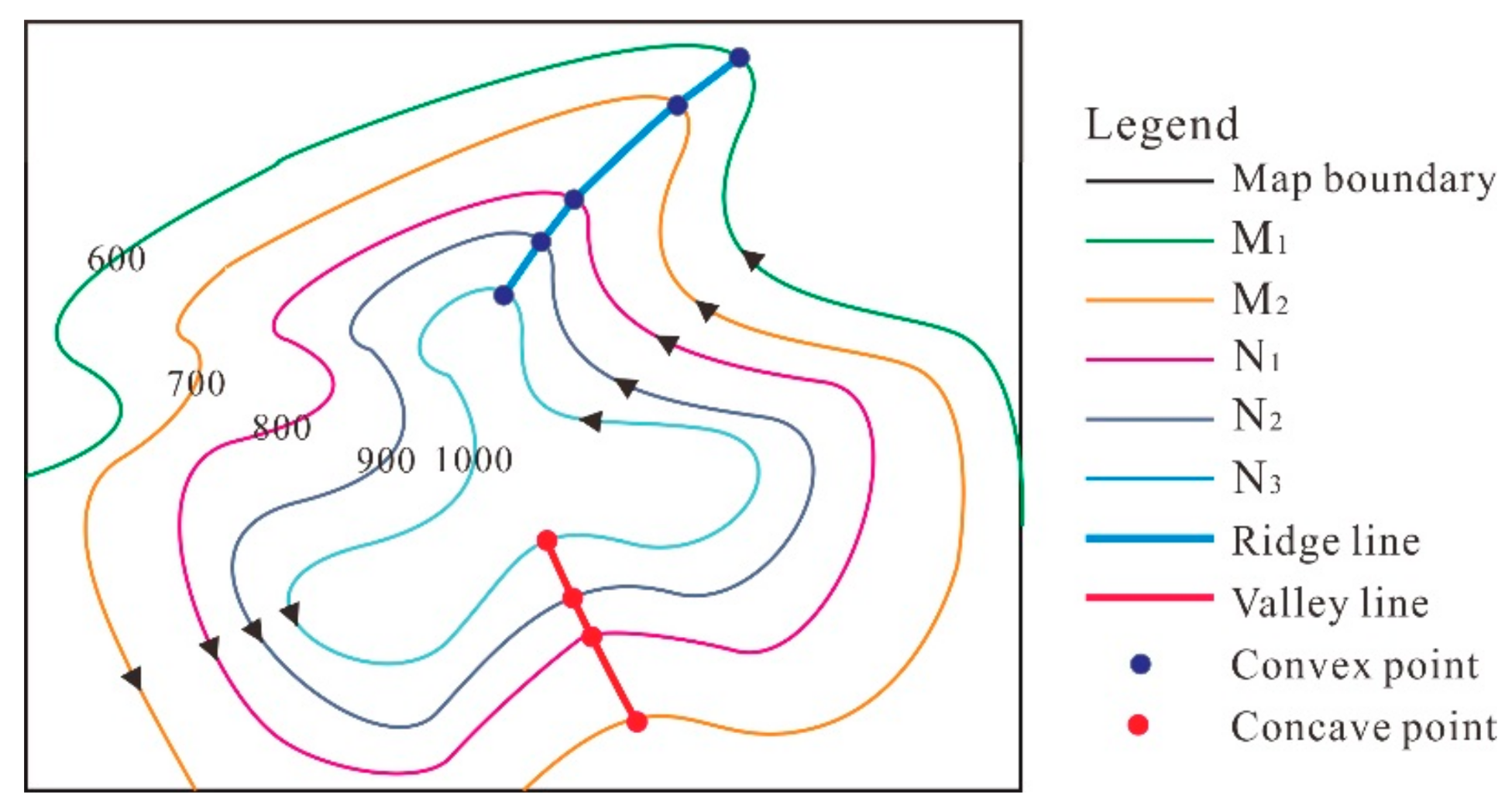
- Classify each feature point as one of two types, concave or convex, which correspond to valley and ridge points in positive landforms.
- (3)
- Connect feature points based on connection principles to form initial terrain feature lines.
- (4)
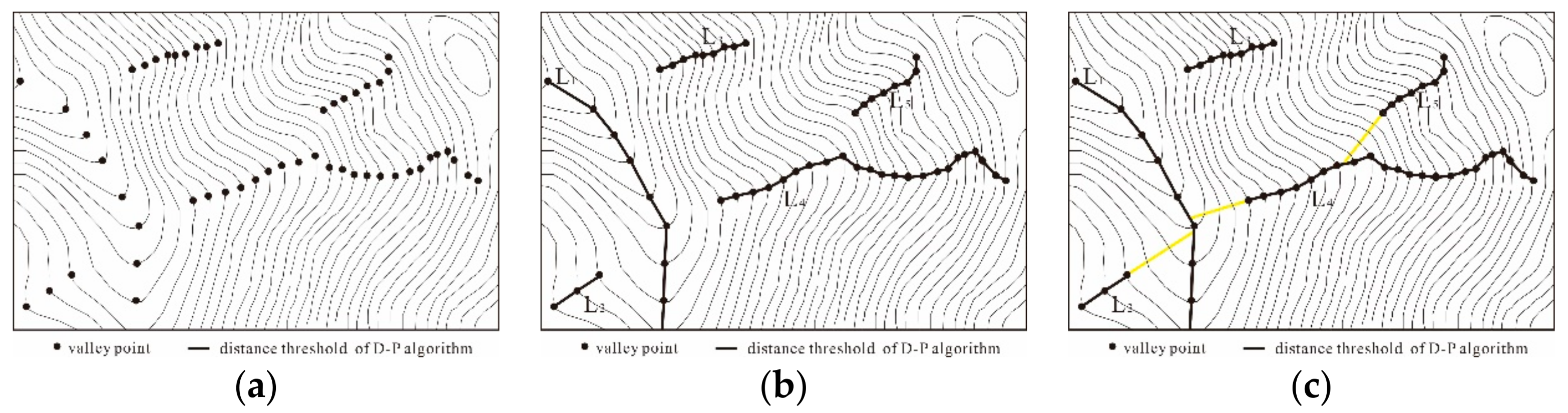
- Perform integrity compensation for terrain features to form the final complete terrain feature lines, which possess tree structures.
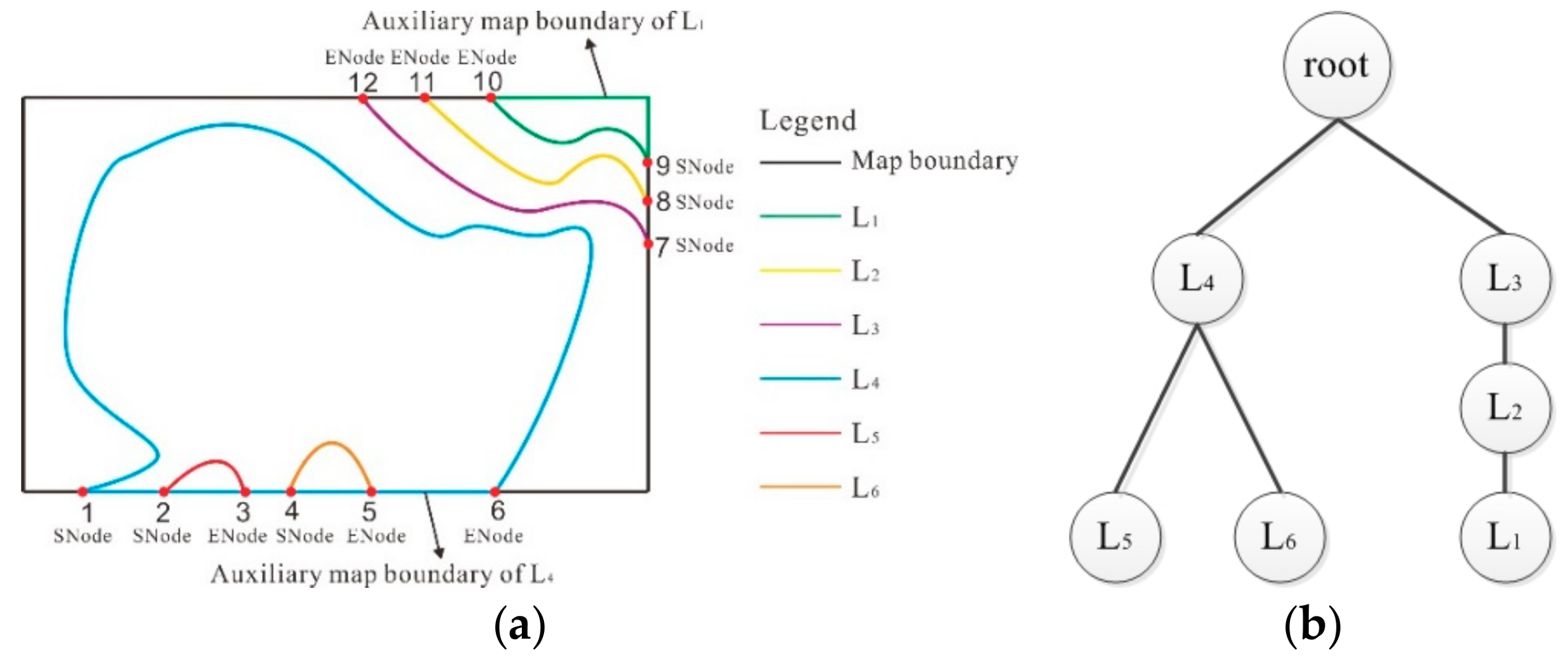
3. Construction of Directed Adjacent Relation Tree (DART)
3.1. Closed Contours
3.1.1. Determination of Adjacent Relation
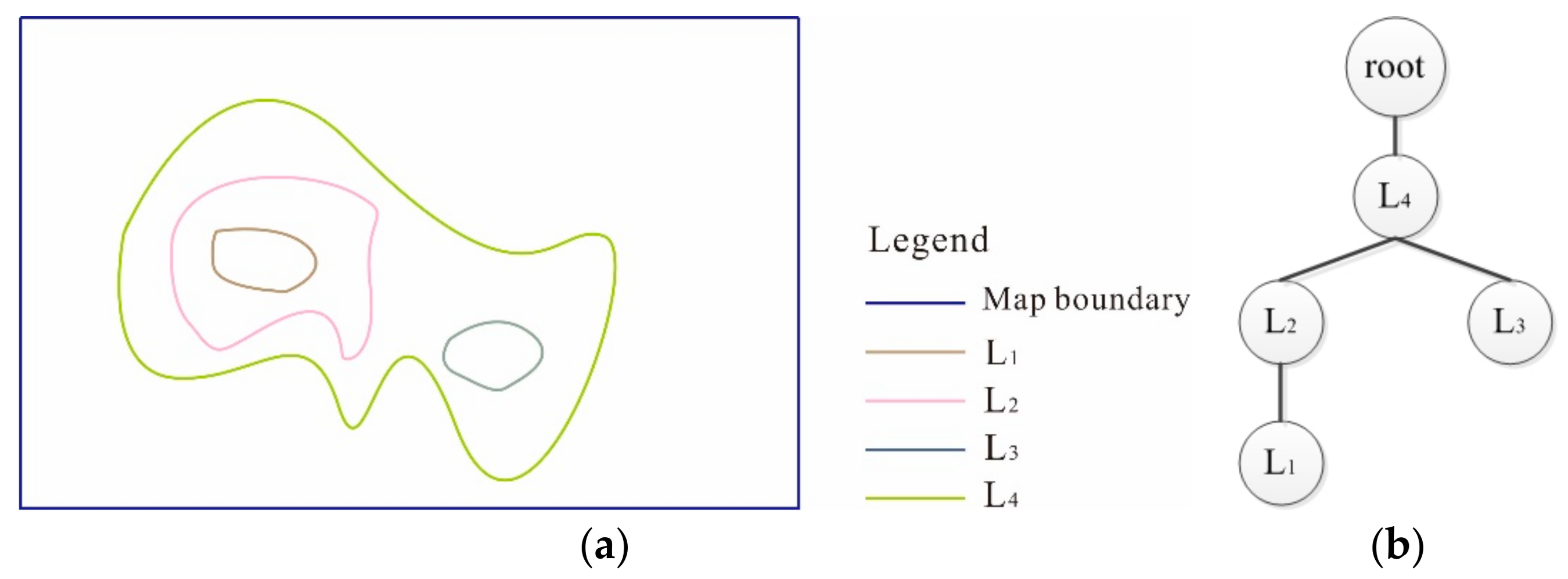
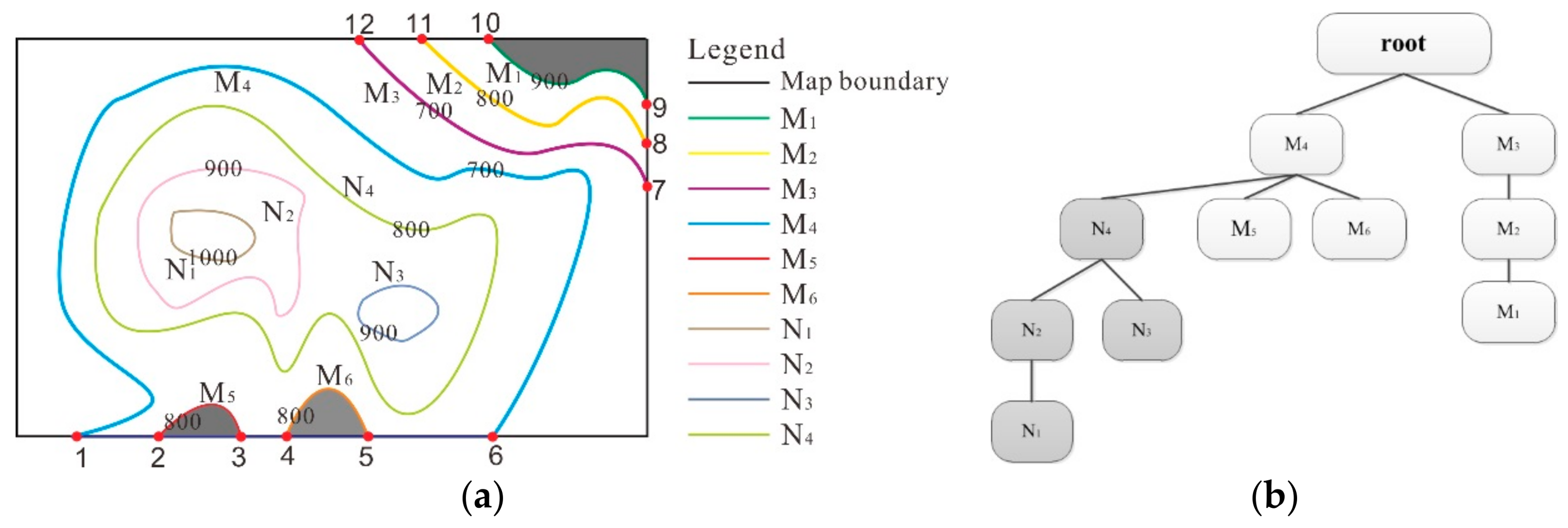
3.1.2. Branched Tree of Closed Contours
3.2. Open Contours
3.2.1. Determination of Adjacent Relation
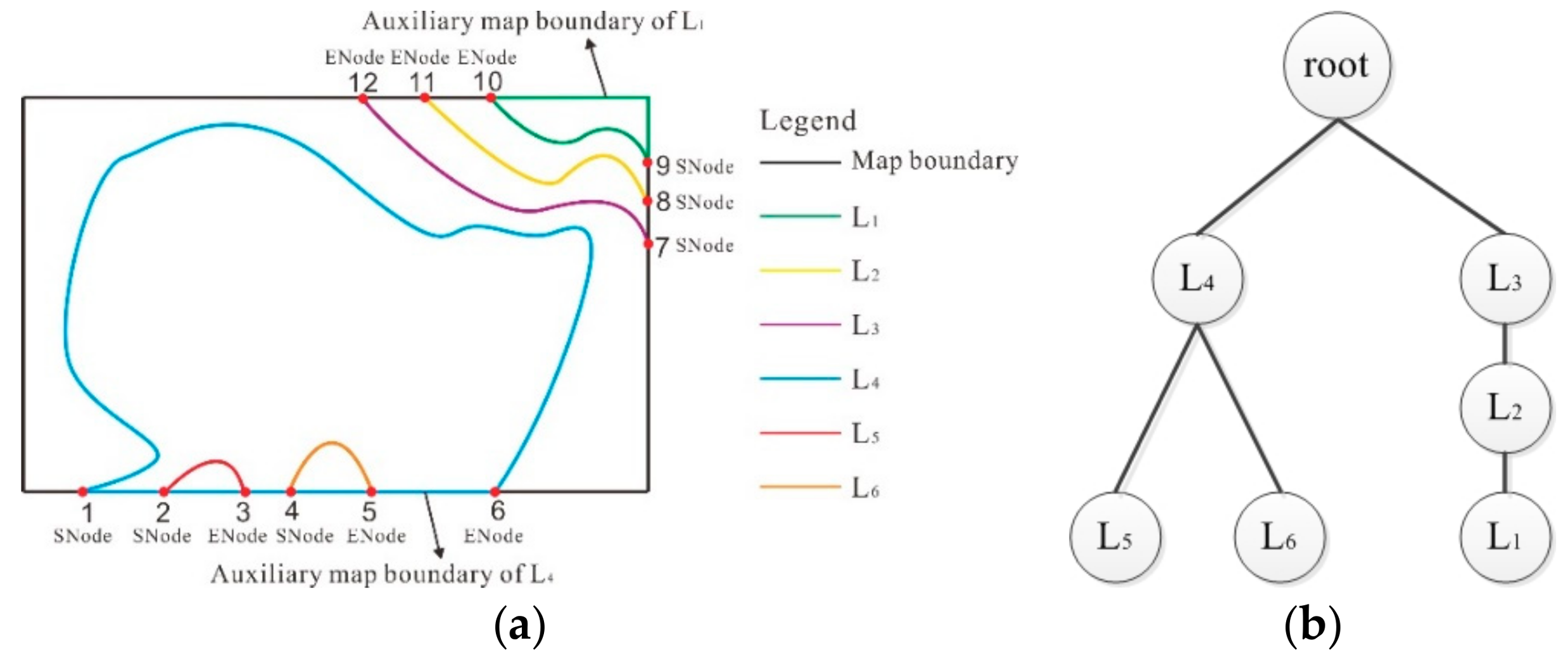
3.2.2. Branched Tree of Open Contours
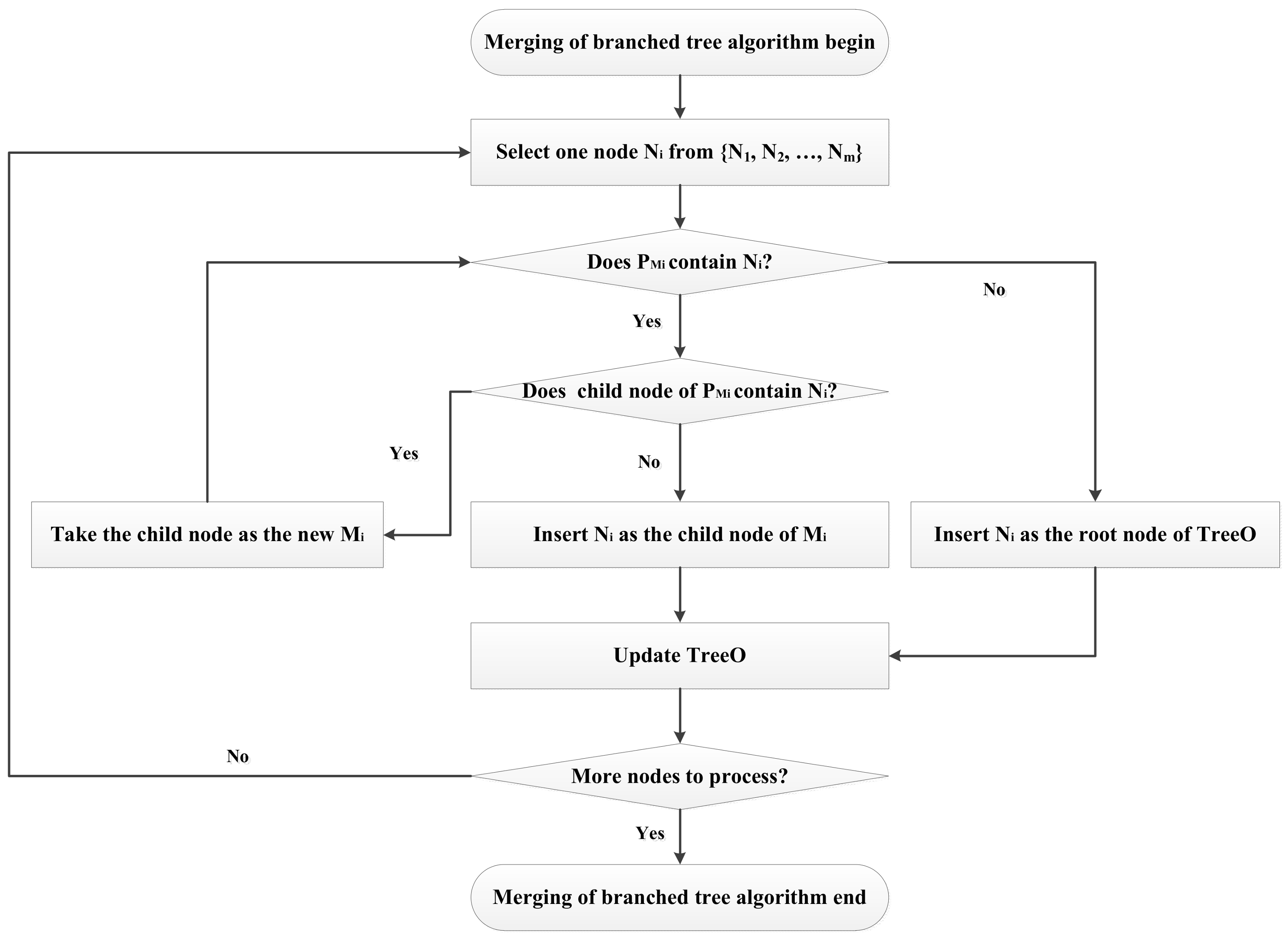
3.3. Merging of Branched Tree and Direction Adjustments
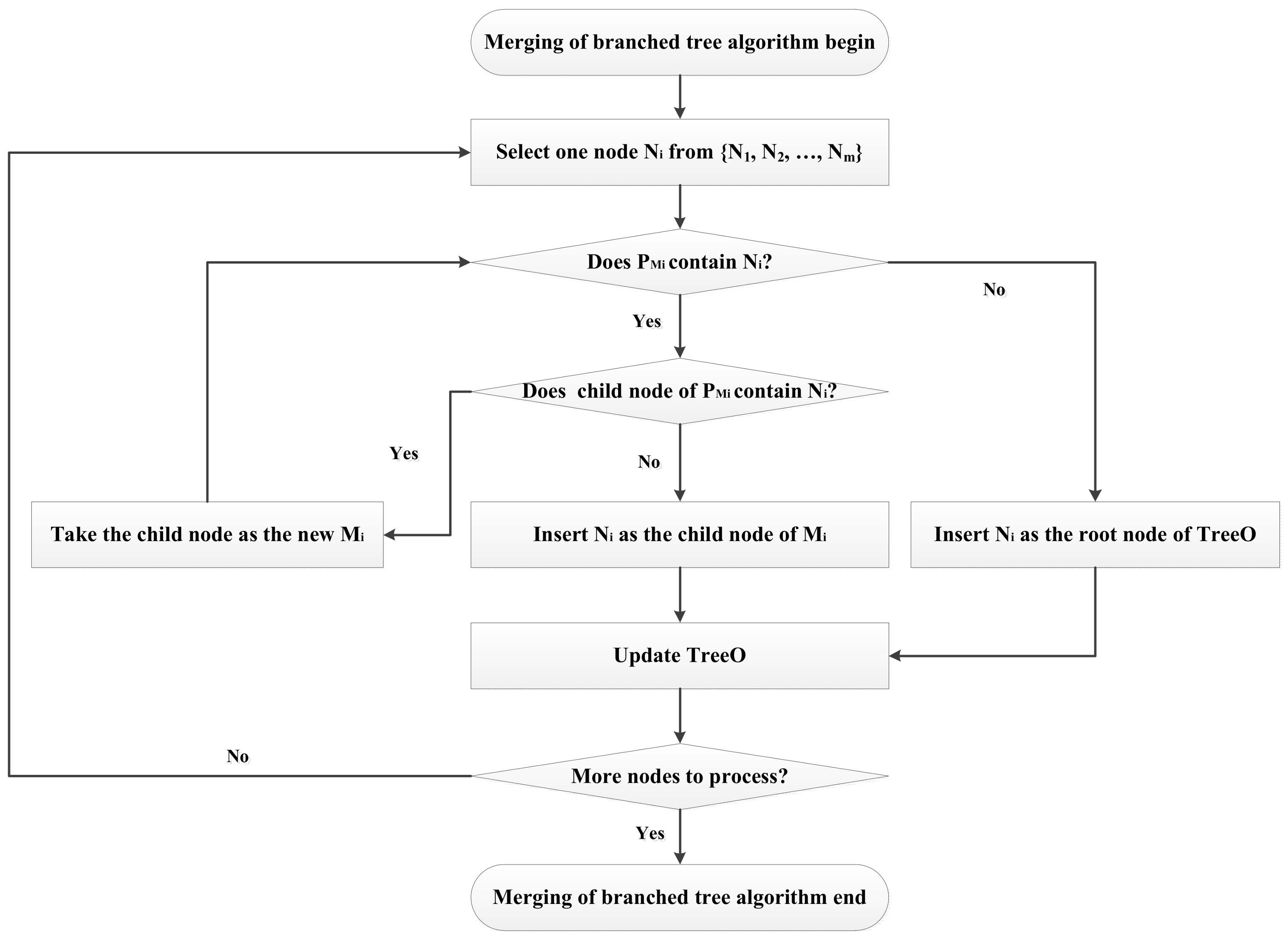
3.3.1. Merging of Branched Tree
3.3.2. Direction Adjustments
Principle for the Determination of Contour Direction
Direction Adjustment for the Set of Maximum Elevation Contours (MContour)
Adjusting the Direction of Adjacent Contours
- (1)
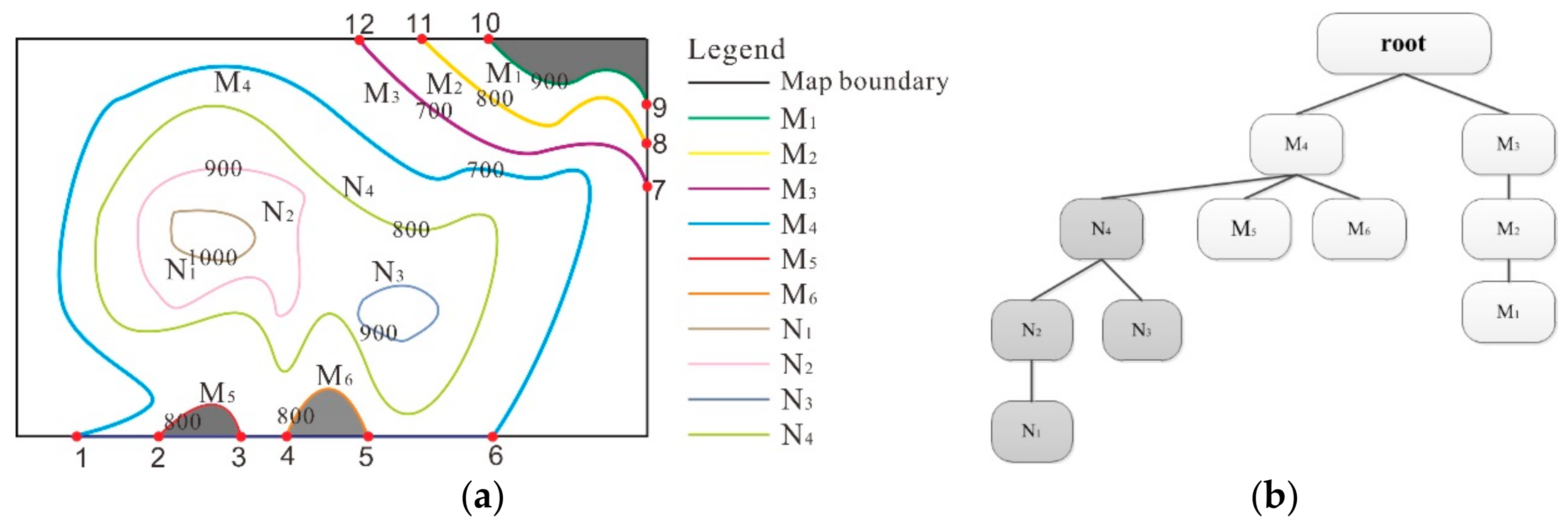
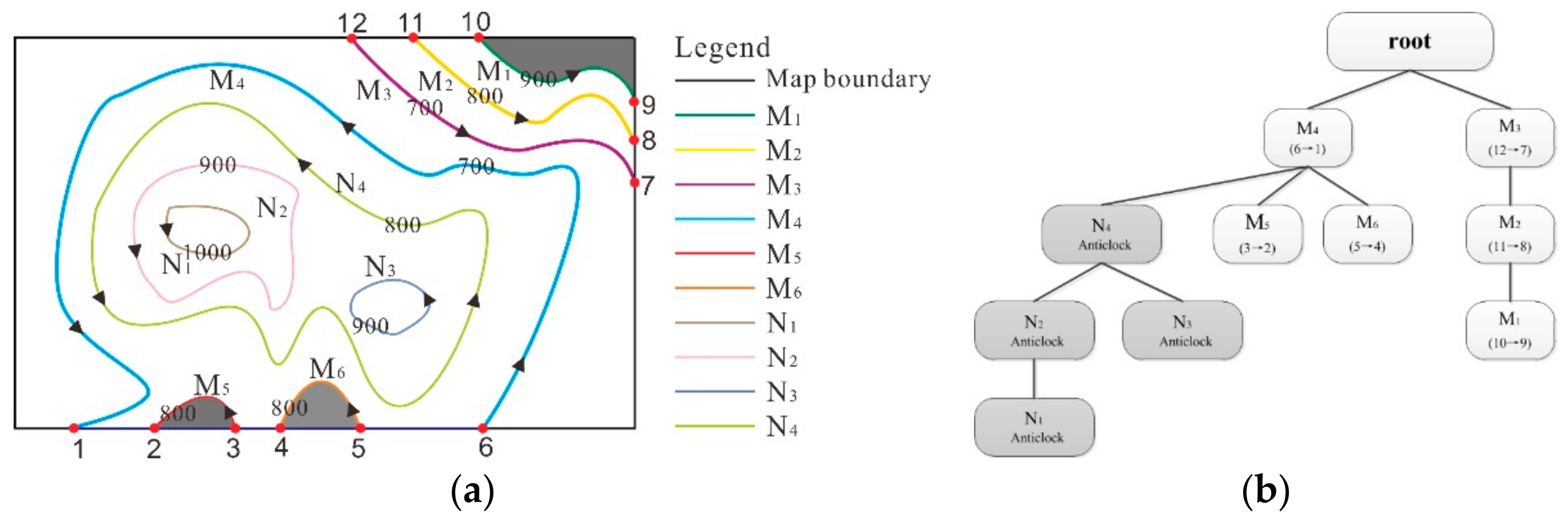
- Direction adjustment for adjacent open contours with the same elevation: If an elevational relationship such that NContour = FContour exists, then the adjacent contours have the same elevation. If these contours are open contours, the method for adjusting their direction is as follows: A counterclockwise pseudo-closed surface is formed for the open contour. The open contour’s direction of closure is reversed if an inclusion relationship exists between the closed surface of FContour and the pseudo-closed surface. Figure 6a shows that after processing closed contour N4, its adjacent contours are represented by the parent and sibling nodes depicted in the adjacent contour tree created in Figure 5b. Hence, M4, M5, and M6 are taken as NContour. Note that M5 and M6 have the same elevation as N4, i.e., 800 m, and the counterclockwise pseudo-closed surfaces formed by these contours, as indicated by the darkened regions in Figure 6a, do not overlap with the closed surface enveloped by N4. Hence, the current counterclockwise direction of M5 and M6 is their direction of closure.
- (2)
- Direction adjustment for adjacent open contours with lower elevations: If an elevational relationship such that NContour < FContour exists, then the adjacent contours have lower elevations. If these contours are open contours, the method for adjusting direction is as follows: A counterclockwise pseudo-closed surface is formed for the open contour. If an inclusion relationship exists between the pseudo-closed surface and the closed surface formed by FContour, the direction of the contour does not require adjustment. Otherwise, the contour’s direction is reversed. In Figure 6a, M4, which is adjacent to N4, has a lower elevation than N4, i.e., 700 m versus 800 m, respectively. Because the pseudo-closed surface of M4 encloses the closed surface of N4, the initially counterclockwise direction of M4 is confirmed as its direction of closure.
- (3)
- Direction adjustment for adjacent open contours with higher elevations: If an elevational relationship such that NContour > FContour exists, the adjacent contour has a higher elevation. If these contours are open contours, the method for adjusting direction of closure is as follows: A counterclockwise pseudo-closed surface is formed for the open contour. If an inclusion relationship is present between the closed surface of FContour and the pseudo-closed surface, the direction of NContour is reversed. Otherwise, no further processing is required. In Figure 6a, once M3, whose elevation is 700 m, has been processed, its adjacent contour, M2, is selected as NContour, and the elevation of M2 is 800 m. Because the pseudo-closed surface of M2 is contained in the pseudo-closed surface of M3, the initially counterclockwise direction is confirmed as the direction of closure of M2.
4. Terrain Feature Line Extraction Based on DART
4.1. Feature Point Detection and Connection
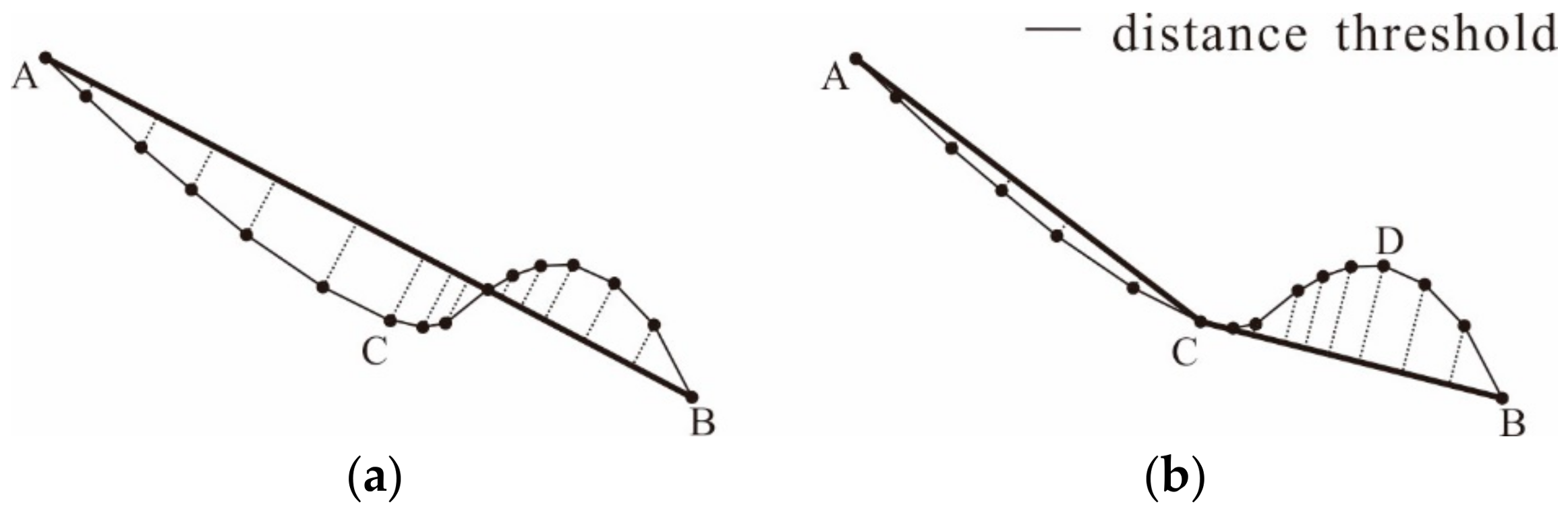
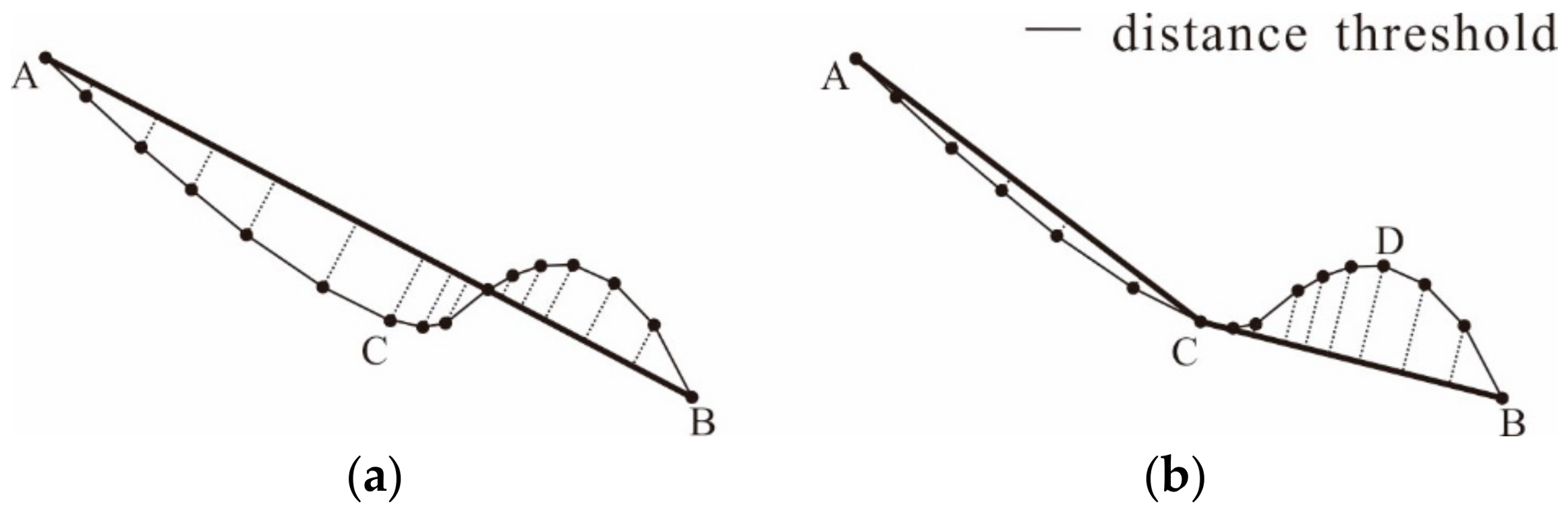
4.1.1. D–P Algorithm-Based Feature Point Detection
4.1.2. Connection of Feature Points
- (1)
- The principle of closest distance: it is likely that the two closest feature points on adjacent contours can be connected to form a terrain feature line.
- (2)
- The principle of natural extension: feature points on adjacent contours that naturally extend along the advancing trend are most likely to be connected to form a terrain feature line.
- (3)
- The non-crossing principle: the connection of feature points on adjacent contours cannot cross a contour or other pre-existing terrain feature lines.
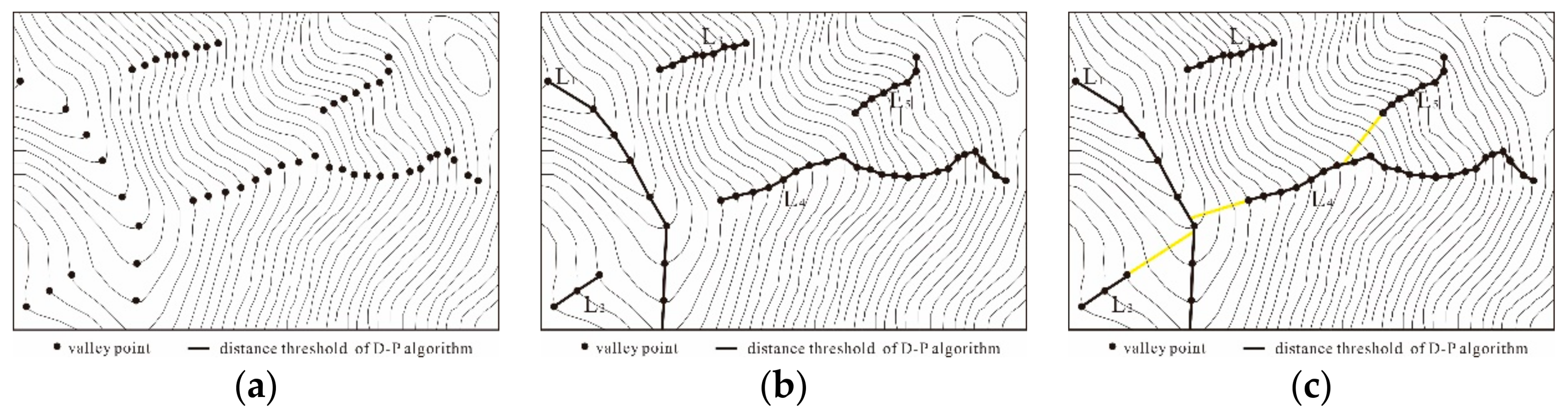
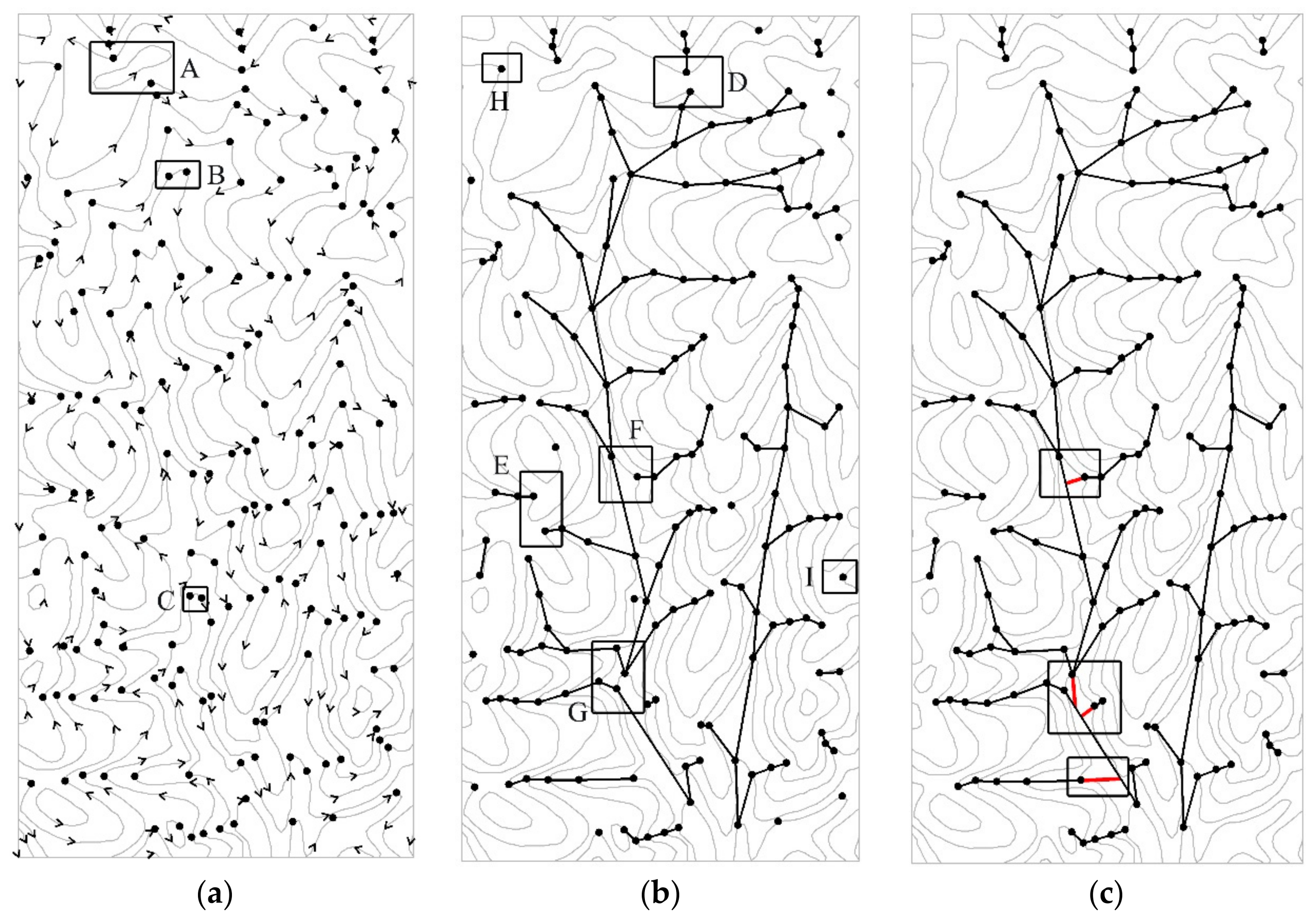
4.2. Integrity Compensation for Terrain Features
5. Experiments and Analysis
5.1. Experimental Area
5.2. Experimental Result and Accuracy Analysis
5.3. Efficiency Analysis
6. Concluding Remarks
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Price, C.V.; Wolock, D.M.; Ayers, M.A. Extraction of terrain features from digital elevation models. In Proceedings of the 1989 National Conference Hydraulic, New Orleans, LA, USA, 14–18 August 1989; ASCE: New York, NY, USA, 1989; pp. 845–850. [Google Scholar]
- Xie, J. Implementation and performance optimization of a parallel contour line generation algorithm. Comput. Geosci. 2012, 49, 21–28. [Google Scholar] [CrossRef]
- Schmieder, A.; Huber, R. Automatic Generation of Contour Lines for Topographic Maps by Means of Airborne High-Resolution Interferometric Radar Data. In Proceedings of the ASPRS Annual Conference, Washington, DC, USA, 22–26 May 2000. [Google Scholar]
- Li, Z.; Sui, H.; Gong, J. A system for automated generalization of contour lines. In Proceedings of the International Carthographic Conference, Ottawa, ON, Canada, 14–21 August 1999. [Google Scholar]
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comput. Vis. Graph. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Metz, M.; Mitasova, H.; Harmon, R.S. Efficient extraction of drainage networks from massive, radar-based elevation models with least cost path search. Hydrol. Earth Syst. Sci. 2011, 15, 667–678. [Google Scholar] [CrossRef]
- Gong, J.; Xie, J. Extraction of drainage networks from large terrain datasets using high throughput computing. Comput. Geosci. 2009, 35, 337–346. [Google Scholar] [CrossRef]
- Zhu, Q.; Tian, Y.; Zhao, J. An efficient depression processing algorithm for hydrologic analysis. Comput. Geosci. 2006, 32, 615–623. [Google Scholar] [CrossRef]
- Yoeli, P. Computer-assisted determination of the valley and ridge lines of digital terrain models. Int. Yearbook Cartogr. 1984, 24, 197–206. [Google Scholar]
- Jenson, S.K.; Domingue, J.O. Extracting Topographic Structure from Digital Elevation Data for Geographic Information System Analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- Zhang, Y.; Fan, H.; Li, Y. A Method of Terrian Feature Extraction Based on Contour. Acta Geod. Cartogr. Sin. 2013, 42, 574–580. [Google Scholar]
- Li, Z.; Sui, H. An integrated technique for automated generalization of contour maps. Cartogr. J. 2000, 37, 29–37. [Google Scholar] [CrossRef]
- Cronin, T. Classifying Hills and Valleys in Digitized Terrain. Photogramm. Eng. Remote Sens. 2000, 66, 1129–1137. [Google Scholar]
- Carr, H.; Snoeyink, J. Representing interpolant topology for contour tree computation. In Topology-Based Methods in Visualization II; Hege, H.-C., Polthier, K., Scheuermann, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 59–73. [Google Scholar]
- Pascucci, V.; Cole-McLaughlin, K.; Scorzelli, G. Multi-resolution computation and presentation of contour trees. In Proceedings of the IASTED Conference on Visualization, Imaging, and Image, Marbella, Spain, 6–8 September 2004. [Google Scholar]
- Qiao, C.F.; Chen, J.; Zhao, R.L. Preliminary studies on contour tree-based topographic data mining. In Proceedings of the International Symposium on Spatio-Temporal, Beijing, China, 27–29 Aug 2005. [Google Scholar]
- Poorten, P.; Jones, C.B. Customisable line generalization using Delaunay triangulation CD-Rom. In Proceedings of the 19th International Cartographic Association Conference, Ottawa, ON, Canada, 14–21 August 1999; Volume 8. [Google Scholar]
- Zhang, Y.; Fan, H.; Huang, W. The Method of Generating Contour Tree Based on Contour Delaunay Triangulation. Acta Geod. Cartogr. Sin. 2012, 41, 461–474. [Google Scholar]
- Roubal, J.; Poiker, T.K. Automated Contour Labelling and the Contour Tree. Proc. AUTO-CARTO 1985, 7, 472–481. [Google Scholar]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or caricature. Can. Cartogr. 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Gökgöz, T.; Selçuk, M. A New Approach for the Simplification of Contours. Cartographica 2004, 39, 37–44. [Google Scholar] [CrossRef]
- Guo, X.; Li, R.; Huang, C. Direction difference in terrain features extraction. In Proceedings of the International Symposium on Spatial Analysis, Spatial-Temporal Data Modeling, and Data Mining, Wuhan, China, 13–14 October 2009; Volume 7492, p. 749243. [Google Scholar]
- Song, Y.; Shan, J. An Adaptive Approach to Topographic Feature Extraction from Digital Terrain Models. Photogramm. Eng. Remote Sens. 2009, 75, 281–290. [Google Scholar] [CrossRef]
- Liu, H.J.; Jin, H.L.; Miao, B.L. An Algorithm for Extracting Terrain Structure Lines Based on Contour Data. In Proceedings of the SPIE–The International Symposium on Digital Earth: Models, Algorithms, and Virtual Reality, International Society for Optics and Photonics, Beijing, China, 4 November 2010. [Google Scholar]
- Ai, T.H. The Drainage Network Extraction from Contour Lines for Contour Line Generalization. ISPRS J. Photogramm. Remote Sens. 2007, 62, 93–103. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, X.; Jiang, W. Rule-based Extraction of Spatial Relations in Natural Language Text. In Proceedings of the International Conference on Computational Intelligence and Software Engineering, CiSE 2009, Wuhan, China, 11–13 December 2009; IEEE: Wuhan, China, 2009; pp. 1–4. [Google Scholar]
- Palomar-Vázquez, J.; Pardo-Pascual, J. Automated spot heights generalisation in trail maps. Int. J. Geogr. Inf. Sci. 2008, 22, 91–110. [Google Scholar] [CrossRef]
- Carr, H.; Snoeyink, J.; Van De Panne, M. Flexible isosurfaces: Simplifying and displaying scalar topology using the contour tree. Comput. Geom. 2010, 43, 42–58. [Google Scholar] [CrossRef]
- Acharya, A.; Natarajan, V. A parallel and memory efficient algorithm for constructing the contour tree. In Proceedings of the 2015 IEEE Pacific Visualization Symposium (PacificVis), Hangzhou, China, 14–17 April 2015; pp. 271–278. [Google Scholar]
- Gilperez, A.; Alonso-Fernandez, F.; Pecharroman, S. Off-line signature verification using contour features. In Proceedings of the 11th International Conference on Frontiers in Handwriting Recognition, Montréal, QC, Canada, 19–21 August 2008; CENPARMI, Concordia University: Montréal, QC, Canada, 2008. [Google Scholar]
- Zhou, J.; Takatsuka, M. Automatic transfer function generation using contour tree controlled residue flow model and color harmonics. IEEE Trans. Vis. Comput. Gragph. 2009, 15, 1481–1488. [Google Scholar] [CrossRef] [PubMed]
- Wong, K.T.; Yuan, X. “Vector Cross-Product Direction-Finding” with an Electromagnetic Vector-Sensor of Six Orthogonally Oriented But Spatially Noncollocating Dipoles/Loops. IEEE Trans. Signal Process. 2010, 59, 160–171. [Google Scholar] [CrossRef]
- Ai, T.; Li, J. A DEM generalization by minor valley branch detection and grid filling. ISPRS J. Photogramm. Remote Sens. 2010, 65, 198–207. [Google Scholar] [CrossRef]
- Kweon, I.S.; Kanade, T. Extracting topographic terrain features from elevation maps. CVGIP Image Understand. 1994, 59, 171–182. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, C.; Du, C. SVM based extraction of spatial relations in text. In Proceedings of the IEEE International Conference on Spatial Data Mining and Geographical Knowledge Services, Fuzhou, China, 29 June–1 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 529–533. [Google Scholar]
- Ruas, A. Multiple Paradigms for Automating Map Generalization: Geometry, Topology, Hierarchical Partitioning and Local Triangulation. In Proceedings of the ACSM/ASPRS Annual Convention and Exposition, Washington, DC, USA, 27 February–2 March 1995; pp. 69–78. [Google Scholar]
- Ware, J.M.; Jones, C.B.; Bundy, G.L. A Triangulated Spatial Model for Cartographic Generalization of Areal Objects. In Proceedings of the International Conference on Spatial Information Theory, Vienna, Austria, 21–23 September 1995; Taylor & Francis: London, UK, 1997; pp. 173–192. [Google Scholar]
- Shewchuk, J.R. Delaunay refinement algorithms for triangular mesh generation. Comput. Geom. Theory Appl. 2014, 47, 741–778. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Area Represented by the Dataset (km2) | Number of Contours | Number of Processing Points | Processing Time Using Our Method (s) | Processing Time Using Delaunay Triangulation (s) |
|---|---|---|---|---|---|
| Dataset 1 | 1183.26 | 695 | 93,494 | 0.212 | 2.453 |
| Dataset 2 | 4996.74 | 1528 | 408,168 | 0.604 | 13.235 |
| Dataset 3 | 14,609.37 | 4270 | 1,150,239 | 5.616 | 61.505 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Guo, P.; Wu, P.; Liu, X. Extraction of Terrain Feature Lines from Elevation Contours Using a Directed Adjacent Relation Tree. ISPRS Int. J. Geo-Inf. 2018, 7, 163. https://doi.org/10.3390/ijgi7050163
Li C, Guo P, Wu P, Liu X. Extraction of Terrain Feature Lines from Elevation Contours Using a Directed Adjacent Relation Tree. ISPRS International Journal of Geo-Information. 2018; 7(5):163. https://doi.org/10.3390/ijgi7050163
Chicago/Turabian StyleLi, Chengming, Peipei Guo, Pengda Wu, and Xiaoli Liu. 2018. "Extraction of Terrain Feature Lines from Elevation Contours Using a Directed Adjacent Relation Tree" ISPRS International Journal of Geo-Information 7, no. 5: 163. https://doi.org/10.3390/ijgi7050163
APA StyleLi, C., Guo, P., Wu, P., & Liu, X. (2018). Extraction of Terrain Feature Lines from Elevation Contours Using a Directed Adjacent Relation Tree. ISPRS International Journal of Geo-Information, 7(5), 163. https://doi.org/10.3390/ijgi7050163