
Generating Up-to-Date and Detailed Land Use and Land Cover Maps Using OpenStreetMap and GlobeLand30

 ,
,  ,
, 
 ,
,  and
and 
Abstract
:1. Introduction
2. Data Sources
2.1. OpenStreetMap (OSM)
Humanitarian Applications of OSM
2.2. GlobeLand30
2.3. Urban Atlas
3. Study Areas
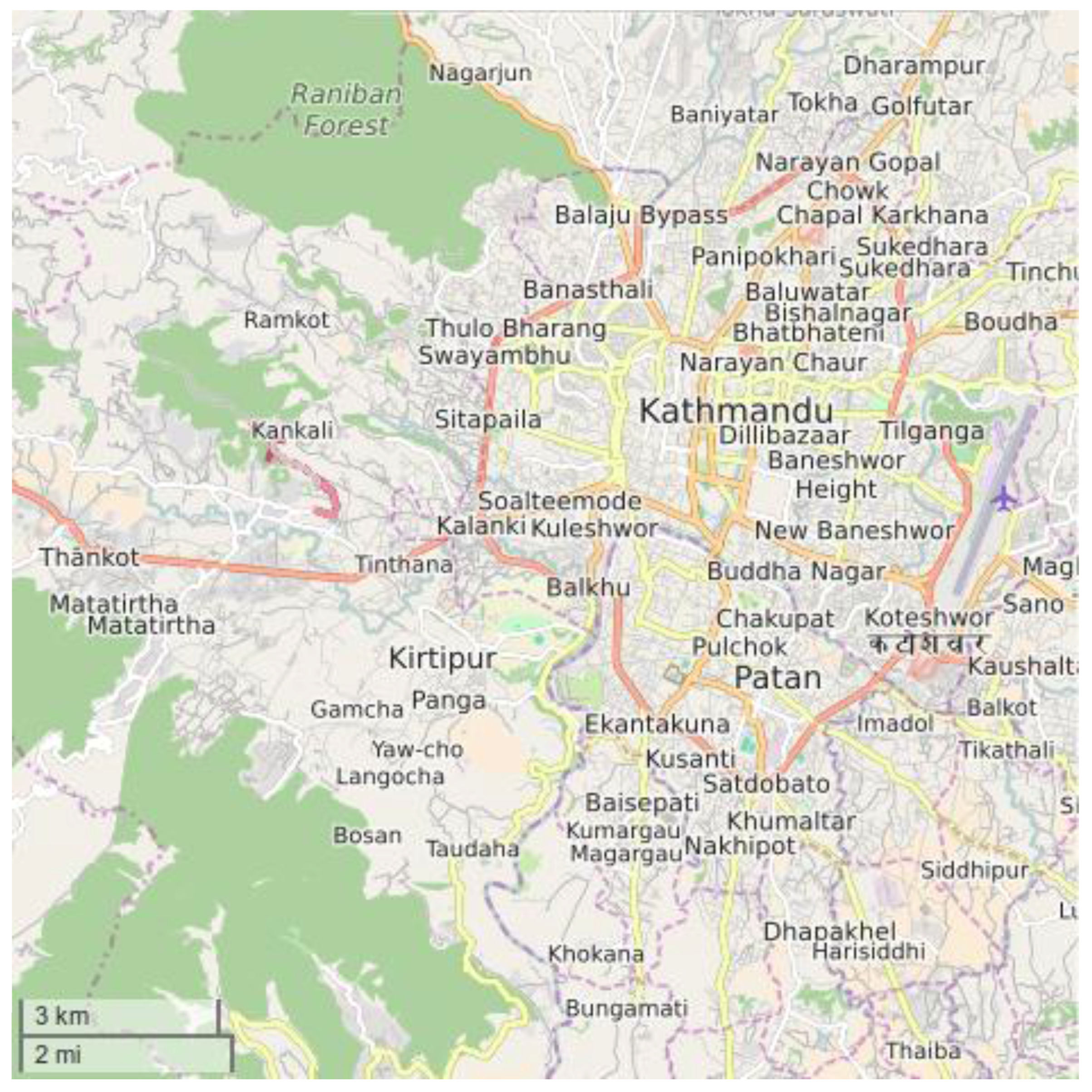
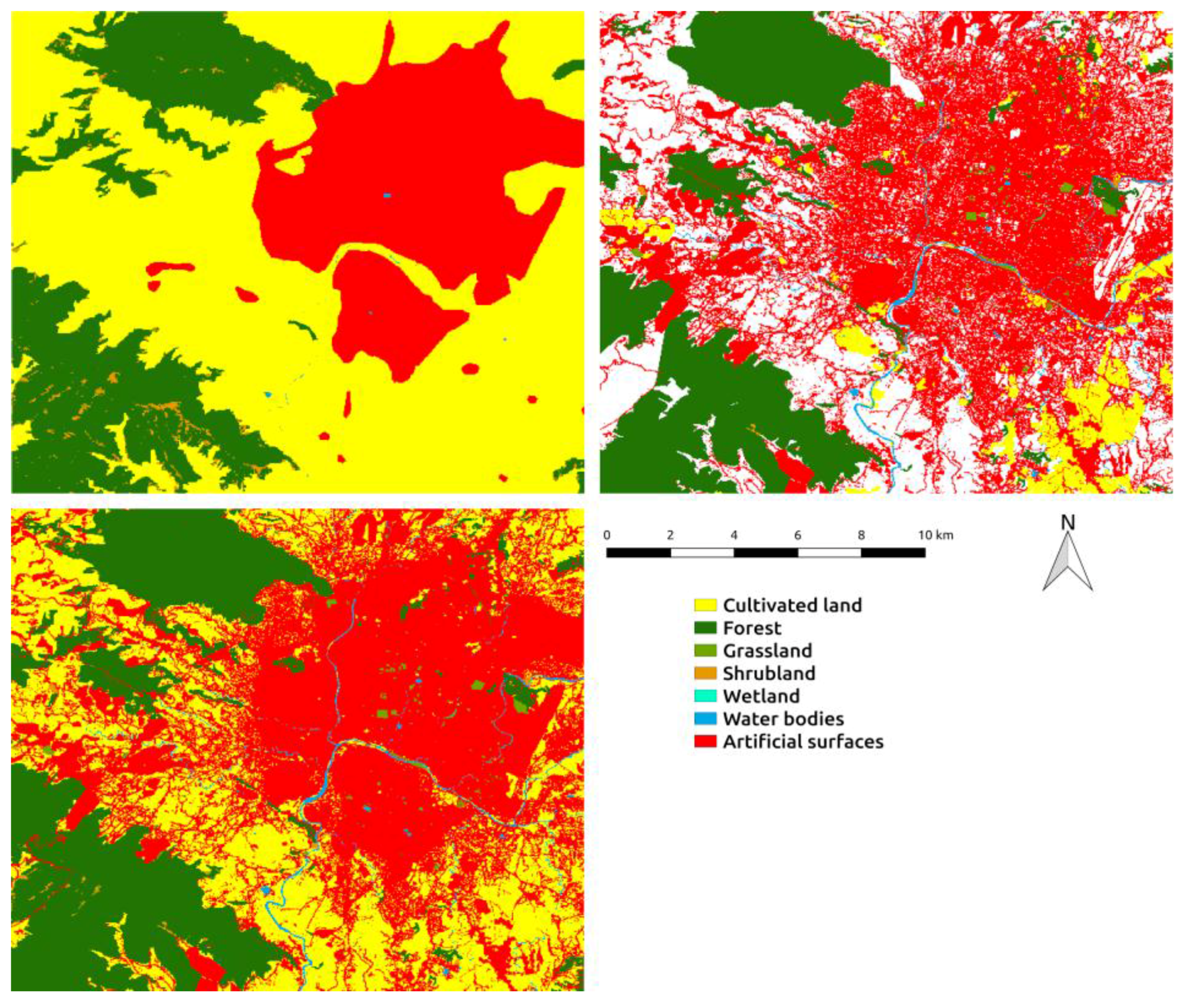
3.1. Kathmandu, Nepal
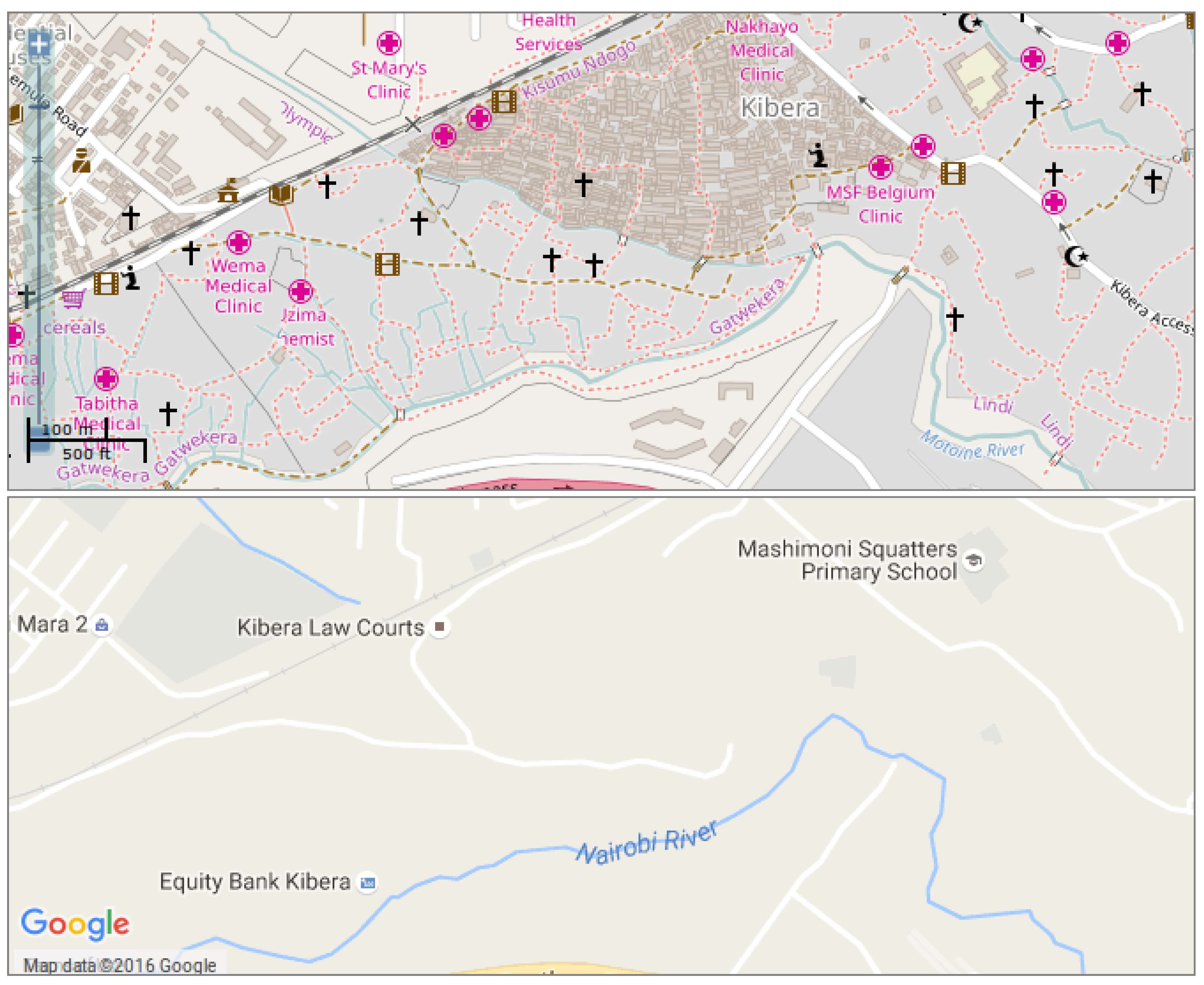
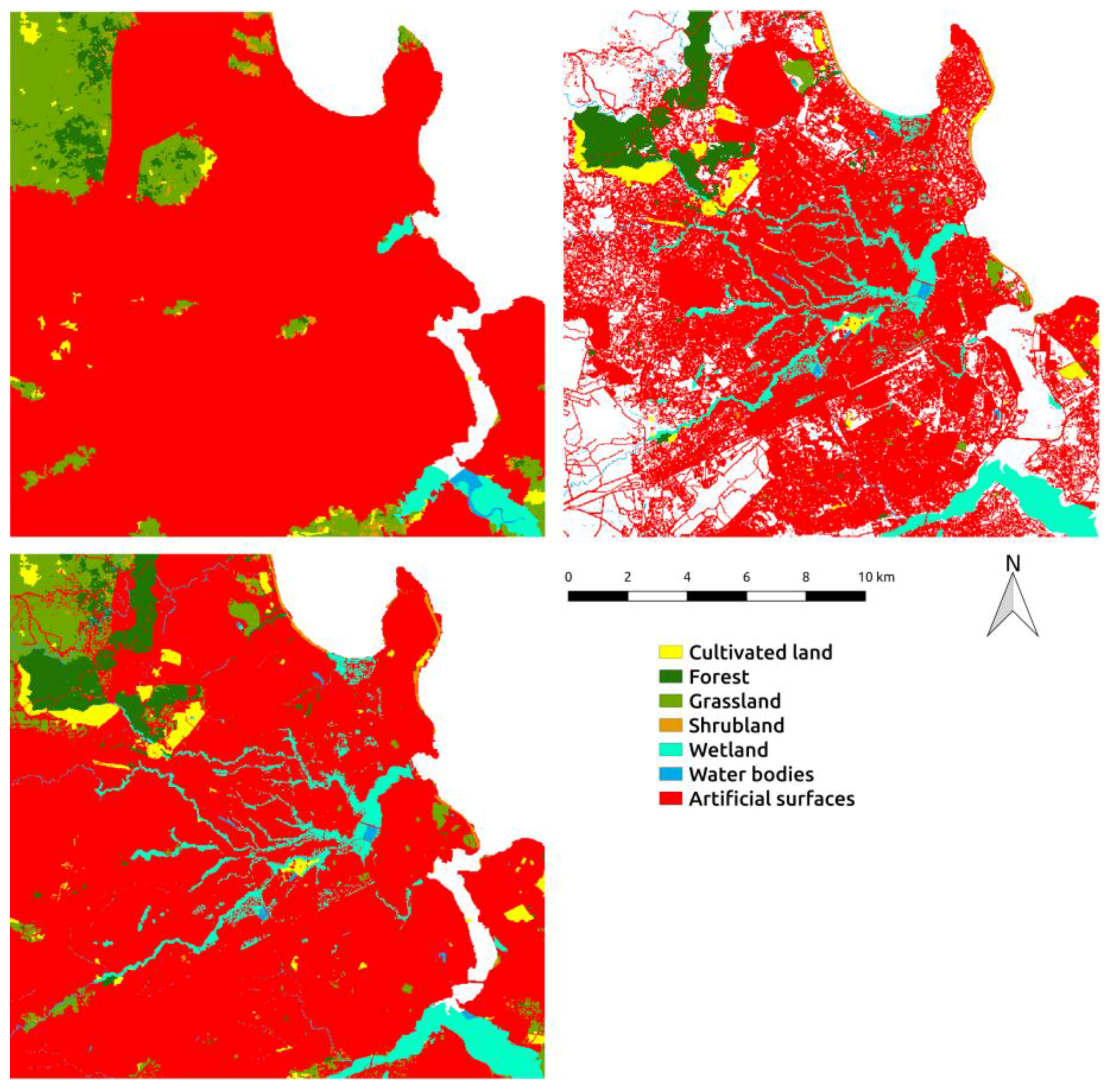
3.2. Dar es Salaam, Tanzania
4. Methodology
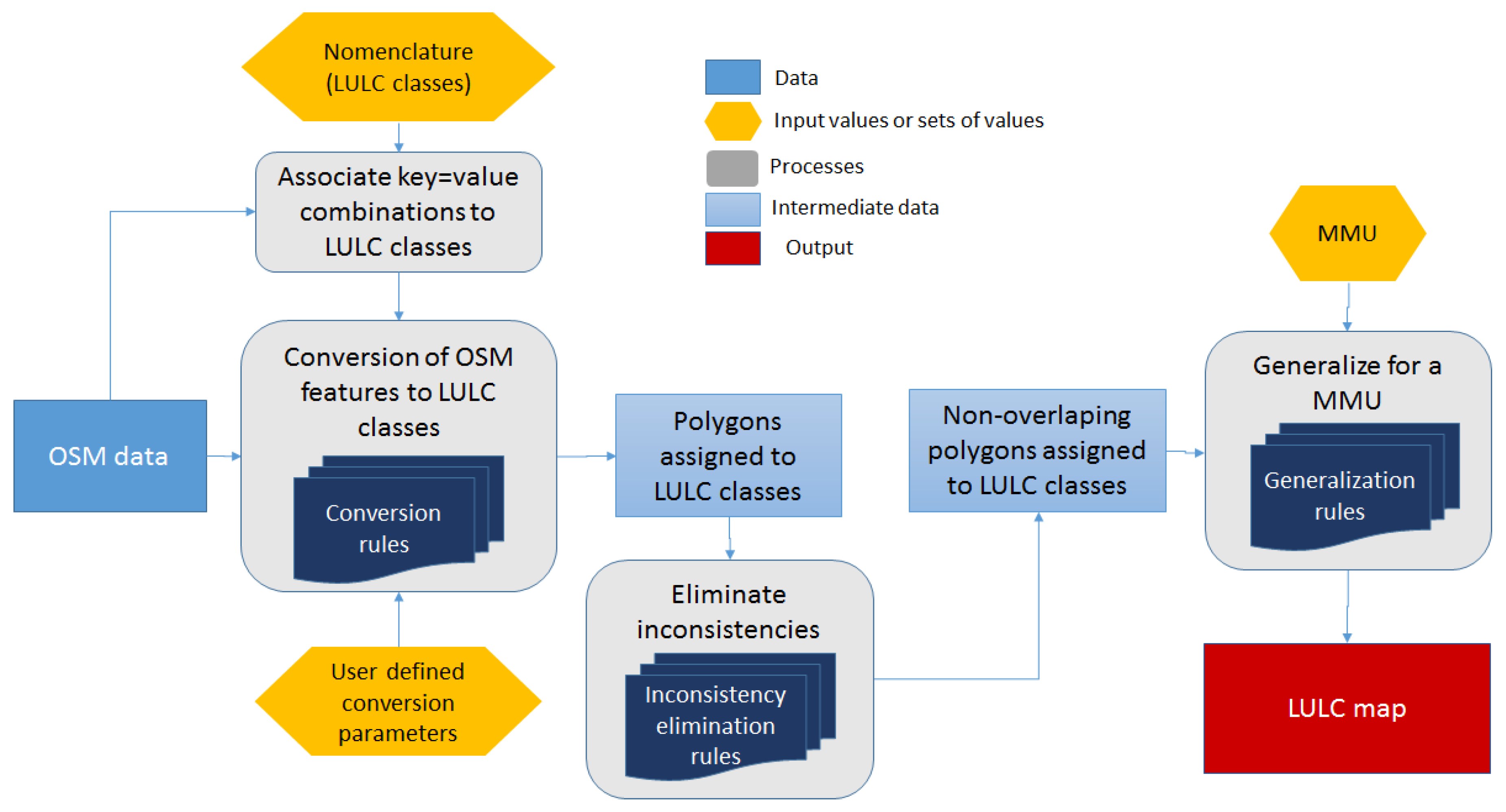
4.1. Conversion from OSM to LULC
4.2. Comparison of OSM-Derived LULC Map with GlobeLand30
4.3. Update of GlobeLand30 through the OSM-Derived LULC Map
- If a pixel contains OSM-derived LULC data, update the GL30 with this information;
- If a pixel contains no OSM-derived LULC data (i.e., a null value), then retain the original value of the GL30.
4.4. Enhancing GlobeLand30 through the Use of More Detailed OSM-Derived Data
4.5. Validation of the Derived Maps
5. Results
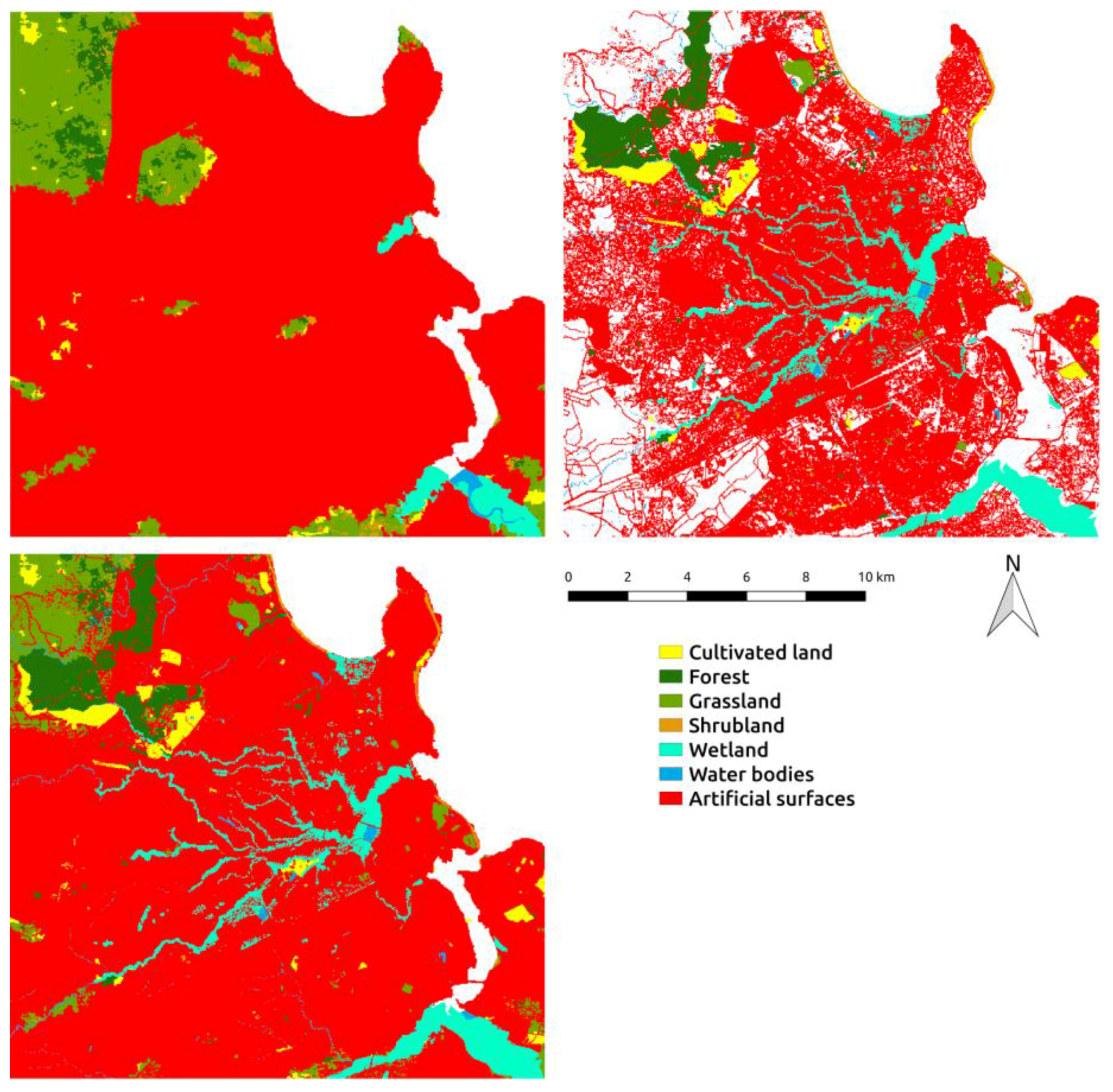
5.1. Conversion of OSM into LULC Classes
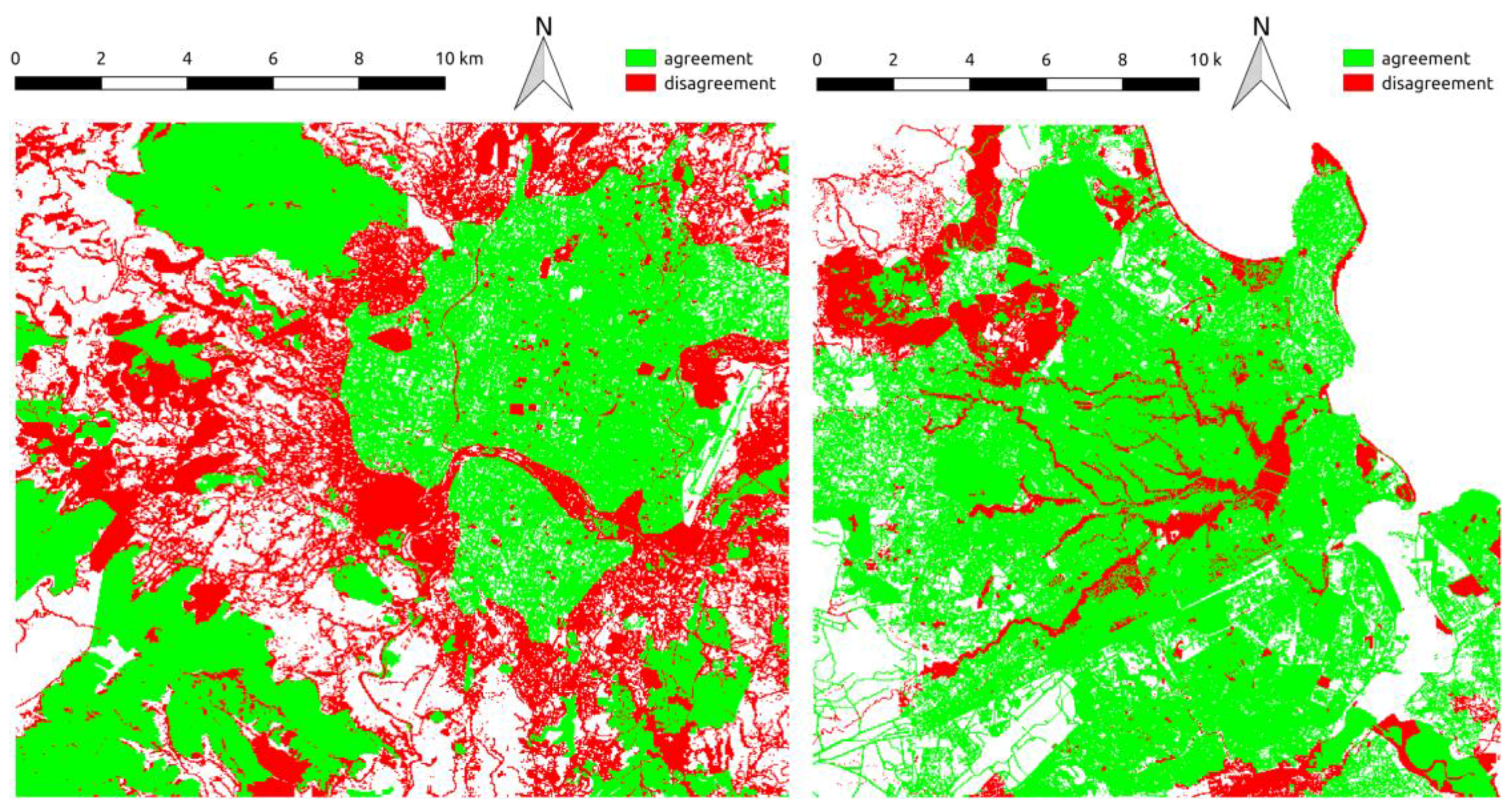
5.2. Evaluation of the Updated GlobeLand30 Map
5.3. Evaluation of the Enhanced GlobeLand30 Map
5.4. Validation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CLC | CORINE Land Cover |
| CMPA | Column Marginal Proportions of Agreement |
| GL30 | GlobeLand30 |
| HOT | Humanitarian OpenStreetMap Team |
| KLL | Kathmandu Living Labs |
| LULC | Land use land cover |
| MMU | Minimum mapping unit |
| OGC | Open Geospatial Consortium |
| OSM | OpenStreetMap |
| OAc | Overall accuracy |
| PAc | Producer’s accuracy |
| RMPA | Row marginal proportions of agreement |
| SDGs | Sustainable Development Goals |
| UA | Urban Atlas |
| UAc | User’s accuracy |
| VGI | Volunteered Geographic Information |
| WPS | Web processing service |
References
- Hollmann, R.; Merchant, C.J.; Saunders, R.; Downy, C.; Buchwitz, M.; Cazenave, A.; Chuvieco, E.; Defourny, P.; de Leeuw, G.; Forsberg, R.; et al. The ESA Climate Change Initiative: Satellite Data Records for Essential Climate Variables. Bull. Am. Meteorol. Soc. 2013, 94, 1541–1552. [Google Scholar] [CrossRef]
- Feddema, J.J.; Oleson, K.W.; Bonan, G.B.; Mearns, L.O.; Buja, L.E.; Meehl, G.A.; Washington, W.M. The Importance of Land-Cover Change in Simulating Future Climates. Science 2005, 310, 1674–1678. [Google Scholar] [CrossRef] [PubMed]
- Di Gregorio, A.; Latham, J. AFRICOVER land cover classification and mapping project. In Land Use, Land Cover and Soil Sciences—Vol. I.; Verheye, W.H., Ed.; UNESCO-Encylopedia of Life Support Systems (EOLSS): Paris, France, 2009; pp. 236–251. [Google Scholar]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: first mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef]
- See, L.; Mooney, P.; Foody, G.; Bastin, L.; Comber, A.; Estima, J.; Fritz, S.; Kerle, N.; Jiang, B.; Laakso, M.; et al. Crowdsourcing, citizen science or Volunteered Geographic Information? The current state of crowdsourced geographic information. ISPRS Int. J. Geo-Inf. 2016, 5, 55. [Google Scholar] [CrossRef]
- Jokar Arsanjani, J.; Helbich, M.; Bakillah, M.; Hagenauer, J.; Zipf, A. Toward mapping land-use patterns from volunteered geographic information. Int. J. Geogr. Inf. Sci. 2013, 27, 2264–2278. [Google Scholar] [CrossRef]
- Antoniou, V.; Fonte, C.; See, L.; Estima, J.; Arsanjani, J.; Lupia, F.; Minghini, M.; Foody, G.; Fritz, S. Investigating the feasibility of geo-tagged photographs as sources of land cover input data. ISPRS Int. J. Geo-Inf. 2016, 5, 64. [Google Scholar] [CrossRef]
- Jokar Arsanjani, J.; Zipf, A.; Mooney, P.; Helbich, M. An introduction to OpenStreetMap in Geographic Information Science: Experiences, research, and applications. In OpenStreetMap in GIScience; Springer International Publishing: Cham, Switzerland, 2015; pp. 1–18. [Google Scholar]
- Fonte, C.; Minghini, M.; Antoniou, V.; See, L.; Brovelli, M.A.; Patriarca, J.; Milčinski, G. An automated methodology for converting OSM data into a land use/cover map. In Proceedings of the 6th International Conference on Cartography & GIS, Albena, Bulgaria, 13–17 June 2016. [Google Scholar]
- Zipf, A. Introducing OSMLanduse.org: OpenStreetMap Landuse Landcover (LULC) WebMap is Online. Available online: http://k1z.blog.uni-heidelberg.de/2016/11/28/introducing-osmlanduseorg-openstreetmap-landuse-landcover-lulc-webmap-is-online/ (accessed on 15 February 2017).
- OpenStreetMap Copyright and License. Available online: https://www.openstreetmap.org/copyright (accessed on 30 September 2016).
- OpenStreetMap Wiki Map Features. Available online: https://www.openstreetmap.org/copyright (accessed on 30 September 2016).
- OpenStreetMap Wiki Stats. Available online: http://wiki.openstreetmap.org/wiki/Stats (accessed on 7 February 2017).
- Neis, P.; Zielstra, D. Recent developments and future trends in volunteered geographic information research: The case of OpenStreetMap. Future Internet 2014, 6, 76–106. [Google Scholar] [CrossRef]
- Mooney, P.; Minghini, M. A review of OpenStreetMap data. In Mapping and the Citizen Sensor; Foody, G.M., See, L., Fritz, S., Fonte, C.C., Mooney, P., Olteanu-Raimond, A.-M., Antoniou, V., Eds.; Ubiquity Press: London, UK, 2017. [Google Scholar]
- Meier, P. New information technologies and their impact on the humanitarian sector. Int. Rev. Red Cross 2011, 93, 1239–1263. [Google Scholar] [CrossRef]
- Moeller, M.S.; Furhmann, S. Mapping the world: A new approach for Volunteered Geographic Information in the cloud. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-6/W1, 9–10. [Google Scholar] [CrossRef]
- Soden, R.; Palen, L. From crowdsourced mapping to community mapping: The post-earthquake work of OpenStreetMap Haiti. In Proceedings of the 11th International Conference on the Design of Cooperative Systems, Cham, Switzerland, 27–30 May 2014. [Google Scholar]
- OpenStreetMap Foundation Missing Maps. Available online: http://www.missingmaps.org/ (accessed on 31 October 2016).
- Ebrahim, M.; Minghini, M.; Molinari, M.E.; Torrebruno, A. MiniMapathon: Mapping the world at 10 years old. In Proceedings of the 8th Annual International Conference on Education and New Learning Technologies (EDULEARN 2016), Barcelona, Spain; 2016; pp. 4200–4208. [Google Scholar]
- Perkins, C.; Dodge, M. The potential of user-generated cartography: A case study of the OpenStreetMap project and Manchester mapping party. North West Geogr. 2008, 8, 19–32. [Google Scholar]
- Hristova, D.; Quattrone, G.; Mashhadi, A.; Capra, L. The life of the party: Impact of social mapping in OpenStreetMap. In Proceedings of the Seventh International AAAI Conference on Weblogs and Social Media, Boston, MA, USA, 8–11 July 2013. [Google Scholar]
- Mooney, P.; Minghini, M.; Stanley-Jones, F. Observations on an OpenStreetMap mapping party organised as a social event during an open source GIS conference. Int. J. Spat. Data Infrastruct. Res. 2015, 10, 138–150. [Google Scholar]
- Latif, S.; Islam, K.M.R.; Khan, M.M.I.; Ahmed, S.I. OpenStreetMap for the disaster management in Bangladesh. In Proceedings of the 2011 IEEE Conference on Open Systems, Langkawi, Malaysia, 25–28 September 2011. [Google Scholar]
- Feinmann, J. How MSF is mapping the world’s medical emergency zones. BMJ 2014, 349, 7540. [Google Scholar] [CrossRef] [PubMed]
- Shemak, A. The cartographic dimensions of humanitarianism: Mapping refugee spaces in post-earthquake Haiti. Cult. Dyn. 2014, 26, 251–275. [Google Scholar] [CrossRef]
- GeoFabrik Map Compare. Available online: http://tools.geofabrik.de/mc (accessed on 31 October 2016).
- Map Kibera Map Kibera. Available online: http://mapkibera.org/ (accessed on 30 September 2016).
- Brovelli, M.A.; Molinari, M.E.; Hussein, E.; Chen, J.; Li, R. The first comprehensive accuracy assessment of GlobeLand30 at a national level: Methodology and results. Remote Sens. 2015, 7, 4191–4212. [Google Scholar] [CrossRef]
- Jokar Arsanjani, J.; See, L.; Tayyebi, A. Assessing the suitability of GlobeLand30 for mapping land cover in Germany. Int. J. Digit. Earth 2016, 9, 873–891. [Google Scholar] [CrossRef]
- Ban, Y.; See, L.; Haas, J.; Jacob, A.; Fritz, S. Validation of the Water Layers of Global Land Cover Products Using Geo-Wiki and National Land Cover Maps. In Proceedings of the 35th EARSel Symposium, Stockholm, Sweden, 15–19 June 2015. [Google Scholar]
- Jokar Arsanjani, J.; Tayyebi, A.; Vaz, E. GlobeLand30 as an alternative fine-scale global land cover map: Challenges, possibilities, and implications for developing countries. Habitat Int. 2016, 55, 25–31. [Google Scholar] [CrossRef]
- Urban Atlas; European Environment Agency: Copenhagen, Denmark, 2010; DAT-107-en.
- Wiseman, A. Kathmandu Living Labs is working to respond in Nepal: help them out! Available online: https://hotosm.org/updates/2015-05-01_kathmandu_living_labs_is_working_to_respond_in_nepal_help_them_out (accessed on 31 October 2016).
- OpenStreetMap Wiki Dar es Salaam. Available online: http://wiki.openstreetmap.org/wiki/Dar_es_Salaam (accessed on 22 April 2017).
- Dar Ramani Huria. Available online: http://ramanihuria.org (accessed on 31 October 2016).
- Felix, B. Building Infrastructure with Mapillary in Dar es Salaam, Tanzania. Available online: http://blog.mapillary.com/update/2015/12/17/worldbank.html (accessed on 3 October 2016).
- Fonte, C.; Patriarca, J.; Minghini, M.; Antoniou, V.; See, L.; Brovelli, M. Using OpenStreetMap to Create Land Use and Land Cover Maps: Development of an Application. In Volunteered Geographic Information and the Future of Geospatial Data; Calazans Campelo, C.E., Bertolotto, M., Corcoran, P., Eds.; Advances in Geospatial Technologies, IGI Global: Hershey, PA, USA, 2017. [Google Scholar]
- GRASS Development Team Geographic Resources Analysis Support System (GRASS) Software, Version 7.2. Open Source Geospatial Foundation. Available online: http://grass.osgeo.org (accessed on 31 October 2016).
- OS Geo GDAL—Geospatial Data Abstraction Library. Available online: http://www.gdal.org/ (accessed on 31 October 2016).
- The PostgreSQL Global Development Group PostgreSQL. Available online: https://www.postgresql.org/ (accessed on 31 October 2016).
- PostGIS Project Steering Committee PostGIS. Available online: http://postgis.net/ (accessed on 31 October 2016).
- OpenStreetMap Wiki Osm2pgsql. Available online: http://wiki.openstreetmap.org/wiki/Osm2pgsql (accessed on 22 April 2017).
- OpenStreetMap Wiki Osmosis. Available online: http://wiki.openstreetmap.org/wiki/Osmosis (accessed on 31 October 2016).
- Stehman, S.V. Sampling designs for accuracy assessment of land cover. Int. J. Remote Sens. 2009, 30, 5243–5272. [Google Scholar] [CrossRef]
- See, L.; Perger, C.; Hofer, M.; Weichselbaum, J.; Dresel, C.; Fritz, S. LACO-WIKI: An open access online portal for land cover validation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W5, 167–171. [Google Scholar] [CrossRef]
- Card, D.H. Using known map category marginal frequencies to improve estimates of thematic map accuracy. Photogramm. Eng. Remote Sens. 1982, 48, 431–439. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class Code | Class Name | Class Description | MMU (km2) |
|---|---|---|---|
| 10 | Cultivated land (CL) | Arable land (cropland): dry land, paddy field, land for greenhouses, vegetable fields, artificial tame pastures, economic cropland in which shrub crops or herbaceous crops are planted, and land abandoned with the reclamation of arable land | 0.0324 |
| 20 | Forest (F) | Broadleaved deciduous forest, evergreen broad-leaf forest, deciduous coniferous forest, evergreen coniferous forest, mixed broadleaf-conifer forest | 0.0576 |
| 30 | Grassland (GL) | Typical grassland, meadow grassland, alpine grassland, desert grassland, grass | 0.09 |
| 40 | Shrubland (SL) | Desert scrub, mountain scrub, deciduous and evergreen shrubs | 0.09 |
| 50 | Wetland (WL) | Lake swamp, river flooding wetlands, seamarsh, shrub/forest wetlands, mangrove forest, tidal flats/salt marshes | 0.0729 |
| 60 | Water bodies (WB) | Open water: lakes, reservoirs/fishponds, rivers | 0.0009 (Rivers) 0.0081 (Lakes) |
| 70 | Tundra (T) | Brush tundra, poaceae tundra, wet tundra, bare tundra, mixed tundra | Not provided |
| 80 | Artificial surfaces (AS) | Settlement place, industrial and mining area, traffic facilities | 0.0144 |
| 90 | Bareland (BL) | Saline-alkali land, sand, gravel, rock, microbiotic crust | 0.0324 |
| 100 | Permanent snow/ice (SI) | Permanent snow, ice sheet and glacier | 0.0081 |
| Level 1 | Level 2 | Level 3 |
|---|---|---|
| 1 Artificial surfaces (AS) | 1.1 Urban fabric (UF) | 1.1.1 Continuous urban fabric |
| 1.1.2 Discontinuous urban fabric | ||
| 1.1.3 Isolated structures | ||
| 1.2 Industrial, commercial, public, military, private and transport units (ICP) | 1.2.1 Industrial, commercial, public, military and private units | |
| 1.2.2 Road and rail network and associated land | ||
| 1.2.3 Port areas | ||
| 1.2.4 Airports | ||
| 1.3 Mine, dump and construction sites (MDC) | 1.3.1 Mineral extraction and dump sites | |
| 1.3.3 Construction sites | ||
| 1.3.4 Land without current use | ||
| 1.4 Artificial non-agricultural vegetated areas (AV) | 1.4.1 Green urban areas | |
| 1.4.2 Sports and leisure facilities | ||
| 2 Agricultural areas, semi-natural areas and wetlands (A) | ||
| 3 Forests (F) | ||
| 5 Water (W) | ||
| OSM | UA Class | GL30 Class | |
|---|---|---|---|
| Key | Key Values | ||
| Amenity (polygon) | animal_shelter, arts_centre, bank, bar, brothel, cafe, car_rental, car_wash, casino, cinema, clinic, college, community_centre, courthouse, crematorium, crypt, dentist, dive_centre, driving_school, embassy, fast_food, ferry_terminal, fire_station, food_court, fuel, grave_yard, gym, hospital, internet_cafe, | 1.2 (ICP) | 80 (AS) |
| Amenity (point) | bar, hospital, pub, restaurant, school, university | 1.2 (ICP) | 80 (AS) |
| building (polygon) | apartments, house, garage, garages, residential, yes, “null” | 1.1 (UF) | 80 (AS) |
| cathedral, chapel, church, civic, commercial, hangar, hospital, hotel, industrial, kiosk, mosque, office, public, retail, school, shrine, stadium, synagogue, temple, train_station, transportation, warehouse | 1.2 (ICP) | 80 (AS) | |
| building (point) | hotel, office, commercial, hospital, industrial, retail, warehouse, cathedral, chapel, church, mosque, temple, synagogue, school, stadium, train_station, transportation, public, shrine, civic, hangar, kiosk | 1.2 (ICP) | 80 (AS) |
| highway (line) | living_street, motorway, motorway_link, pedestrian, primary, primary_link, residential, road, secondary, secondary_link, service, tertiary, tertiary_link, trunk, trunk_link, unclassified | 1.2 (ICP) | 80 (AS) |
| landuse (polygon) | residential | 1.1 (UF) | 80 (AS) |
| cemetery, commercial, industrial, military, railway, retail | 1.2 (ICP) | 80 (AS) | |
| brownfield, construction, depot, landfill, quarry, | 1.3 (MDC) | 80 (AS) | |
| scrub | 1.3 (MDC) | 40 (SL) | |
| beer-garden | 1.4 (AV) | 80 (AS) | |
| flowers, grass, greenfield, meadow, plants, recreation_ground, recreational_area, recreational, village_green | 1.4 (AV) | 30 (GL) | |
| allotments, farm, farmland, farmyard, grass, greenhouse-horticulture, meadow, orchard, vineyard, allotments, farm, farmland, farmyard, meadow | 2.0 (A) | 10 (CL) | |
| grass, meadow | 2.0 (A) | 30 (GL) | |
| forest | 3.0 (F) | 20 (F) | |
| reservoir, pond | 5.0 (W) | 60 (WB) | |
| leisure (polygon) | adult_gaming_centre, amusement_arcade, dance, hackerspace, ice_rink, sports_centre, stadium, swimming_pool | 1.2 (ICP) | 80 (AS) |
| dog_park, garden, park, golf_course, miniature_golf, pitch, playground, summer_camp, track, track, water_park | 1.4 (AV) | 30 (GL) | |
| marina | 1.4 (AV) | 80 (AS) | |
| nature_reserve | 2.0 (A) or 3.0 (F) | 20 (F), 30 (GL), 40 (SL), 50 (WL) or 90 (BL) | |
| beach_resort | 2.0 (A) | 90 (BL) | |
| swimming_area | 5.0 (W) | 60 (WB) | |
| natural (polygon) | forest (if area < 10,000 m2), grassland, park | 1.4 (AV) | 20 (F) |
| grassland | 2.0 (A) | 30 (GL) | |
| fell, grassland, heath, scrub | 2.0 (A) | 90 (BL), 30 (GL) or 40 (SL) | |
| beach, sand, shingle, bare_rock, scree, glacier | 2.0 (A) | 90 (BL) | |
| mud, wetland | 2.0 (A) | 50 (WL) | |
| forest, wood | 3.0 (F) | 20 (F) | |
| bay, water, riverbank | 5.0 (W) | 60 (WB) | |
| railway (line) | rail | 1.2 (ICP) | 80 (AS) |
| waterway (line) | river, riverbank, stream | 5.0 (W) | 60 (WB) |
| dock | 1.2 (ICP) | 80 (AS) | |
| Class Code | Name | Mapping Rules Applied to Each Pixel |
|---|---|---|
| 80.1 | Urban fabric (UF) | If a pixel contains OSM-derived LULC data of class 80.1 to 80.4, then change updated GL30 to this class ELSE If a pixel was assigned to class 80 and contains no OSM-derived LULC data (i.e., a value of null), then assign a value of 80.1 |
| 80.2 | Industrial, commercial, public, military, private and transport units (ICP) | |
| 80.3 | Mine, dump and construction sites (MDC) | |
| 80.4 | Artificial non-agricultural vegetated areas (AV) | |
| 10 | Cultivated land (CL) | If a pixel was not assigned to any of the classes 80.1 to 80.4 and belongs to one of these classes, then the class value remains unchanged |
| 20 | Forest (F) | |
| 30 | Grassland (GL) | |
| 40 | Shrubland (SL) | |
| 50 | Wetland (WL) | |
| 60 | Water bodies (WB) |
| GL30 LULC Map | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 10 (CL) | 20 (F) | 30 (GL) | 40 (SL) | 50 (WL) | 60 (WB) | 80 (AS) | RMPAi | ||
| OSM-derived LULC map | 10 (CL) | 14,048 | 29 | 0 | 6 | 0 | 7 | 796 | 0.94 |
| 20 (F) | 7776 | 48,823 | 126 | 1498 | 0 | 0 | 568 | 0.83 | |
| 30 (GL) | 499 | 1 | 0 | 1 | 0 | 7 | 831 | 0 | |
| 40 (SL) | 224 | 42 | 0 | 3 | 0 | 0 | 14 | 0.01 | |
| 50 (WL) | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 60 (WB) | 2362 | 11 | 0 | 0 | 0 | 31 | 677 | 0.01 | |
| 80 (AS) | 75,689 | 2322 | 51 | 344 | 0 | 50 | 58,111 | 0.43 | |
| CMPAi | 0.14 | 0.95 | 0 | 0 | - | 0.33 | 0.95 | OA = 0.56 | |
| GL30 LULC Map | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 10 (CL) | 20 (F) | 30 (GL) | 40 (SL) | 50 (WL) | 60 (WB) | 80 (AS) | RMPAi | ||
| OSM-derived LULC map | 10 (CL) | 41 | 470 | 2225 | 164 | 0 | 0 | 2377 | 0.01 |
| 20 (F) | 17 | 2178 | 3850 | 66 | 2 | 0 | 4469 | 0.21 | |
| 30 (GL) | 0 | 11 | 174 | 141 | 0 | 0 | 1320 | 0.11 | |
| 40 (SL) | 0 | 0 | 5 | 14 | 0 | 0 | 824 | 0.02 | |
| 50 (WL) | 58 | 64 | 1081 | 130 | 4100 | 619 | 10,642 | 0.25 | |
| 60 (WB) | 0 | 73 | 262 | 36 | 1 | 2 | 1372 | 0.00 | |
| 80 (AS) | 1098 | 596 | 6632 | 940 | 216 | 0 | 162,780 | 0.94 | |
| CMPAi | 0.03 | 0.64 | 0.01 | 0.01 | 0.95 | 0 | 0.89 | OA = 0.81 | |
| Class | Original GL30 | OSM-Derived LULC Map | Updated GL30 |
|---|---|---|---|
| 10 (CL) | 55.57% | 6.93% | 26.97% |
| 20 (F) | 19.98% | 27.35% | 22.50% |
| 30 (GL) | 0.11% | 0.62% | 0.50% |
| 40 (SL) | 0.88% | 0.13% | 0.35% |
| 50 (WL) | 0 | 0 | 0 |
| 60 (WB) | 0.04% | 1.43% | 1.04% |
| 80 (AS) | 23.42% | 63.53% | 48.64% |
| non-null pixels | 100% | 71.71% | 100% |
| Class | Original GL30 | OSM-Derived LULC Map | Updated GL30 |
|---|---|---|---|
| 10 (CL) | 0.82% | 2.52% | 2.27% |
| 20 (F) | 1.82% | 5.06% | 4.38% |
| 30 (GL) | 9.59% | 0.79% | 5.09% |
| 40 (SL) | 0.76% | 0.40% | 0.55% |
| 50 (WL) | 1.68% | 7.99% | 6.16% |
| 60 (WB) | 0.25% | 0.84% | 0.65% |
| 80 (AS) | 85.08% | 82.40% | 80.90% |
| non-null pixels | 83.31% | 62.28% | 83.44% |
| Class Code | Name | % of Class 80 Kathmandu | % of Class 80 Dar es Salaam |
|---|---|---|---|
| 80.1 | Urban fabric (UF) | 53.56% | 62.68% |
| 80.2 | Industrial, commercial, public, military, private and transport units (ICP) | 45.89% | 36.71% |
| 80.3 | Mine, dump and construction sites (MDC) | 0.10% | 0.10% |
| 80.4 | Artificial non-agricultural vegetated areas (AV) | 0.45% | 0.51% |
| Classes | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 10 (CL) | 20 (F) | 30 (GL) | 40 (SL) | 50 (WL) | 60 (WB) | 80 (AS) | |||
| Kathmandu | GL30 | UAc | 28 | 87 | 33 | 0 | 0 | 0 | 90 |
| PAc | 96 | 90 | 1 | 5 | 0 | 0 | 47 | ||
| OAc | 54 | ||||||||
| Updated GL30 | UAc | 58 | 60 | 4 | 38 | 0 | 49 | 73 | |
| PAc | 63 | 92 | 1 | 2 | 0 | 46 | 73 | ||
| OAc | 65 | ||||||||
| Dar es Salaam | GL30 | UAc | 0 | 56 | 34 | 4 | 69 | 80 | 65 |
| PAc | 12 | 35 | 26 | 12 | 29 | 45 | 78 | ||
| OAc | 61 | ||||||||
| Updated GL30 | UAc | 12 | 35 | 26 | 12 | 29 | 45 | 78 | |
| PAc | 20 | 71 | 14 | 1 | 82 | 10 | 89 | ||
| OAc | 69 | ||||||||
| Classes | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 80.1 (UF) | 80.2 (ICP) | 80.3 (MDC) | 80.4 (AV) | 10 (CL) | 20 (F) | 30 (GL) | 40 (SL) | 50 (WL) | 60 (WB) | ||
| Kathmandu | UAc | 80 | 22 | 0 | 44 | 58 | 86 | 4 | 38 | 0 | 50 |
| PAc | 54 | 74 | 0 | 3 | 71 | 94 | 1 | 4 | 0 | 51 | |
| OAc | 61 | ||||||||||
| Dar es Salaam | UAc | 66 | 32 | 8 | 40 | 14 | 42 | 26 | 12 | 30 | 46 |
| PAc | 63 | 58 | 22 | 1 | 58 | 74 | 14 | 10 | 83 | 14 | |
| OAc | 49 | ||||||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fonte, C.C.; Minghini, M.; Patriarca, J.; Antoniou, V.; See, L.; Skopeliti, A. Generating Up-to-Date and Detailed Land Use and Land Cover Maps Using OpenStreetMap and GlobeLand30. ISPRS Int. J. Geo-Inf. 2017, 6, 125. https://doi.org/10.3390/ijgi6040125
Fonte CC, Minghini M, Patriarca J, Antoniou V, See L, Skopeliti A. Generating Up-to-Date and Detailed Land Use and Land Cover Maps Using OpenStreetMap and GlobeLand30. ISPRS International Journal of Geo-Information. 2017; 6(4):125. https://doi.org/10.3390/ijgi6040125
Chicago/Turabian StyleFonte, Cidália Costa, Marco Minghini, Joaquim Patriarca, Vyron Antoniou, Linda See, and Andriani Skopeliti. 2017. "Generating Up-to-Date and Detailed Land Use and Land Cover Maps Using OpenStreetMap and GlobeLand30" ISPRS International Journal of Geo-Information 6, no. 4: 125. https://doi.org/10.3390/ijgi6040125
APA StyleFonte, C. C., Minghini, M., Patriarca, J., Antoniou, V., See, L., & Skopeliti, A. (2017). Generating Up-to-Date and Detailed Land Use and Land Cover Maps Using OpenStreetMap and GlobeLand30. ISPRS International Journal of Geo-Information, 6(4), 125. https://doi.org/10.3390/ijgi6040125