Figure 1.
The view of the site—reality mesh model post-processed with ContextCapture tool.
Figure 1.
The view of the site—reality mesh model post-processed with ContextCapture tool.
Figure 2.
Site scheme and equipment: (a) area boundaries and markers with control points. The blue boundaries show the areas of conventional Global Navigation Satellite System (GNSS) surveys of stockpiles, (b) ordinary self-made marker and (c) Propeller AeroPoint 1.0 marker.
Figure 2.
Site scheme and equipment: (a) area boundaries and markers with control points. The blue boundaries show the areas of conventional Global Navigation Satellite System (GNSS) surveys of stockpiles, (b) ordinary self-made marker and (c) Propeller AeroPoint 1.0 marker.
Figure 3.
Methodology for Unmanned Aerial Vehicle (UAV)-based automated stockpile volumes calculation accuracy assessment: The coordinates obtained locally with Trimble GNSS receiver were compared with the known points of the digital model. The volumes of stockpiles were calculated and compared between all datasets.
Figure 3.
Methodology for Unmanned Aerial Vehicle (UAV)-based automated stockpile volumes calculation accuracy assessment: The coordinates obtained locally with Trimble GNSS receiver were compared with the known points of the digital model. The volumes of stockpiles were calculated and compared between all datasets.
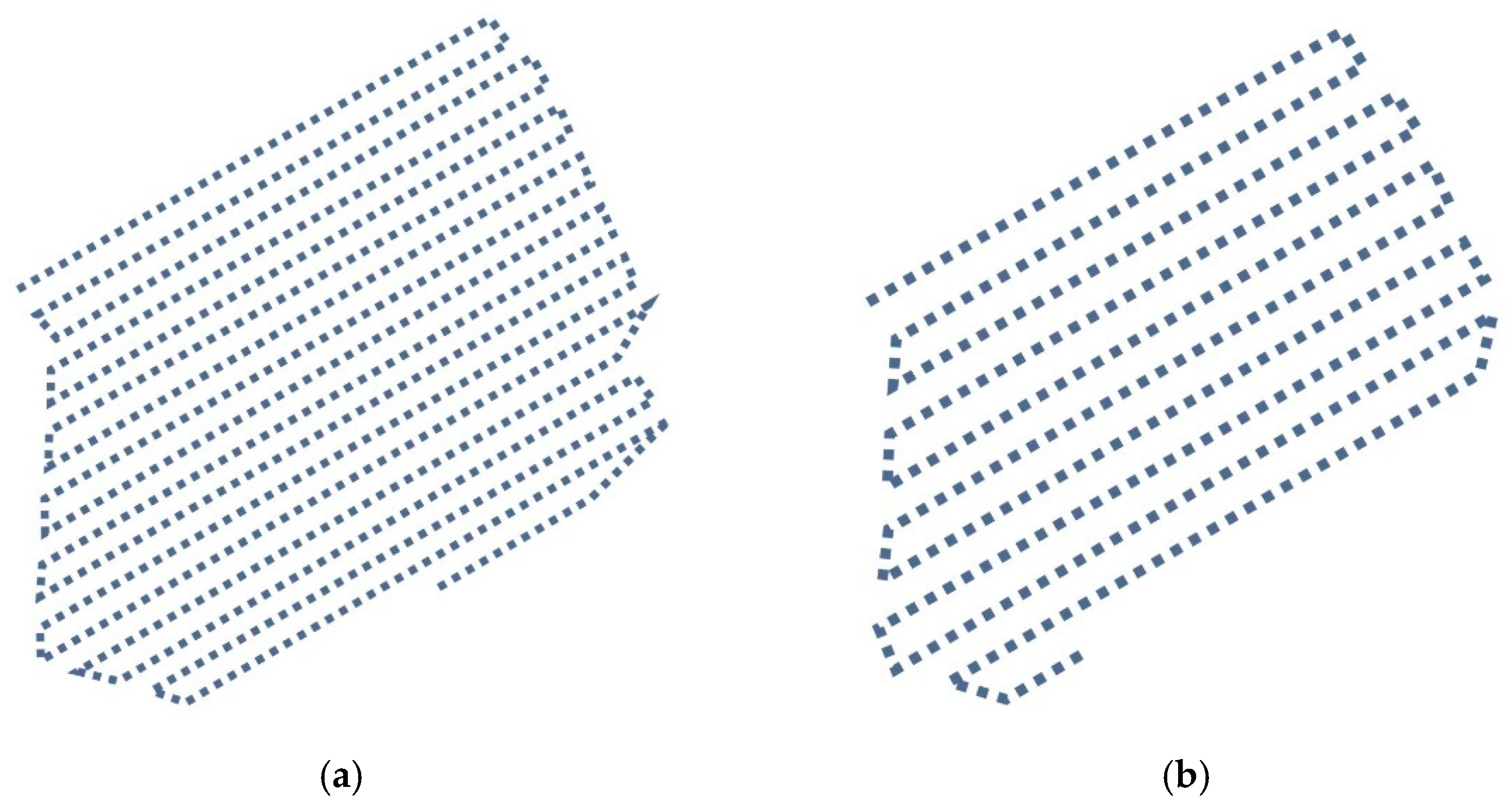
Figure 4.
Flight schemes: (a) flight 74 m above the ground, (b) flight 100 m above the ground.
Figure 4.
Flight schemes: (a) flight 74 m above the ground, (b) flight 100 m above the ground.
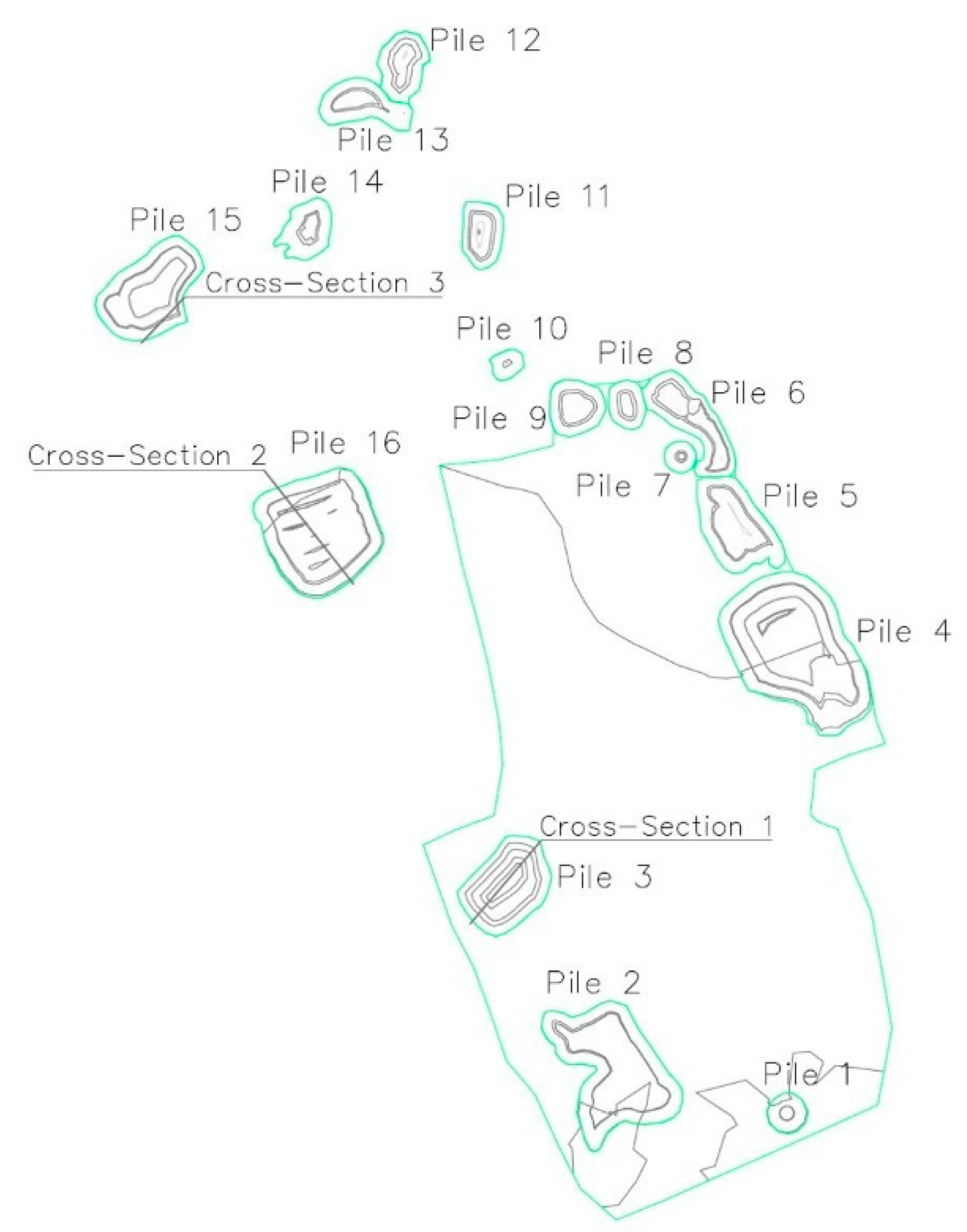
Figure 5.
Data acquired with Trimble GNSS receiver. Marked positions of three random cross-sections.
Figure 5.
Data acquired with Trimble GNSS receiver. Marked positions of three random cross-sections.
Figure 6.
A conceptual scheme of UAV and a base record Global Positioning System (GPS) information.
Figure 6.
A conceptual scheme of UAV and a base record Global Positioning System (GPS) information.
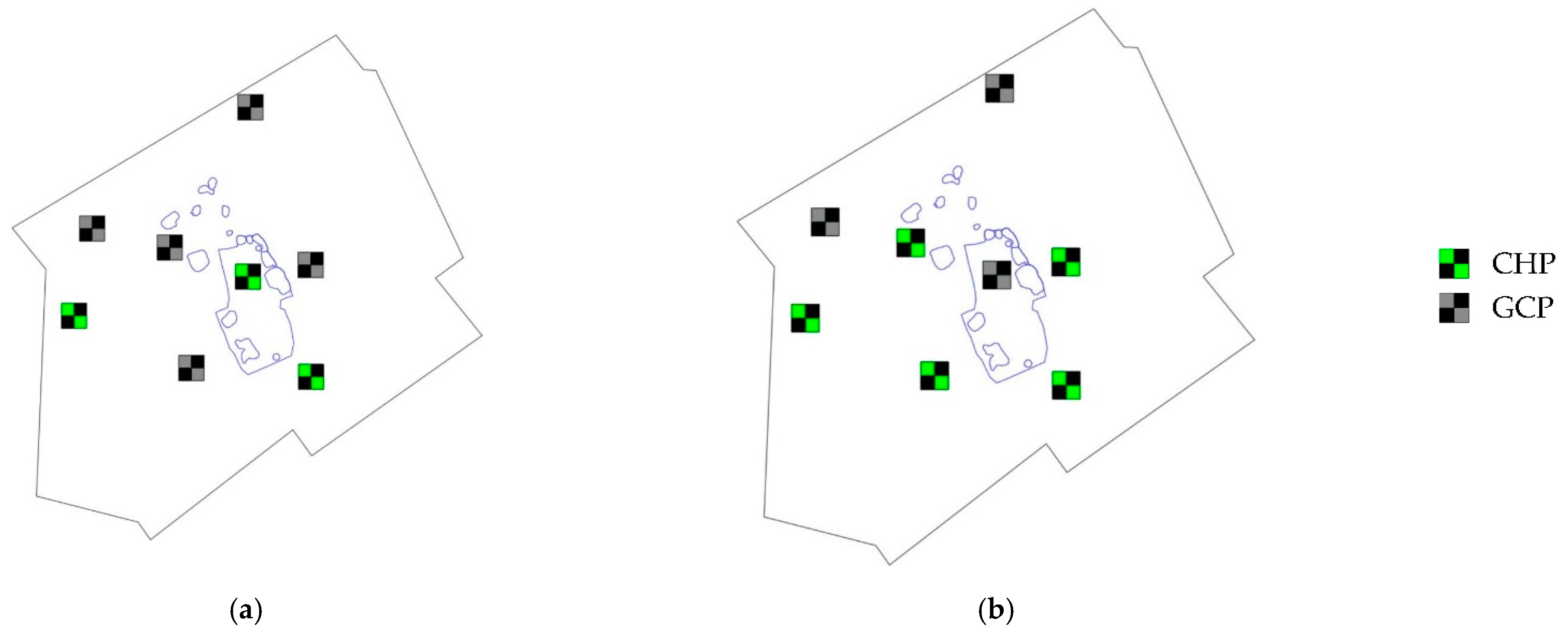
Figure 7.
Post-Processing Kinematic (PPK) survey control points configurations in a test site: (a) 1 known point + 10 check points (CHPs), (b) 1 known point + 4 CHPs.
Figure 7.
Post-Processing Kinematic (PPK) survey control points configurations in a test site: (a) 1 known point + 10 check points (CHPs), (b) 1 known point + 4 CHPs.
Figure 8.
Timelines of flights and GPS data acquisition with AeroPoints: (a) 74 m flights and (b) 100 m flight.
Figure 8.
Timelines of flights and GPS data acquisition with AeroPoints: (a) 74 m flights and (b) 100 m flight.
Figure 9.
Visualization of Triangulated Irregular Network (TIN) surfaces imported to Trimble Stratus under different conditions: (a) reality mesh, (b) reality mesh with TIN surfaces.
Figure 9.
Visualization of Triangulated Irregular Network (TIN) surfaces imported to Trimble Stratus under different conditions: (a) reality mesh, (b) reality mesh with TIN surfaces.
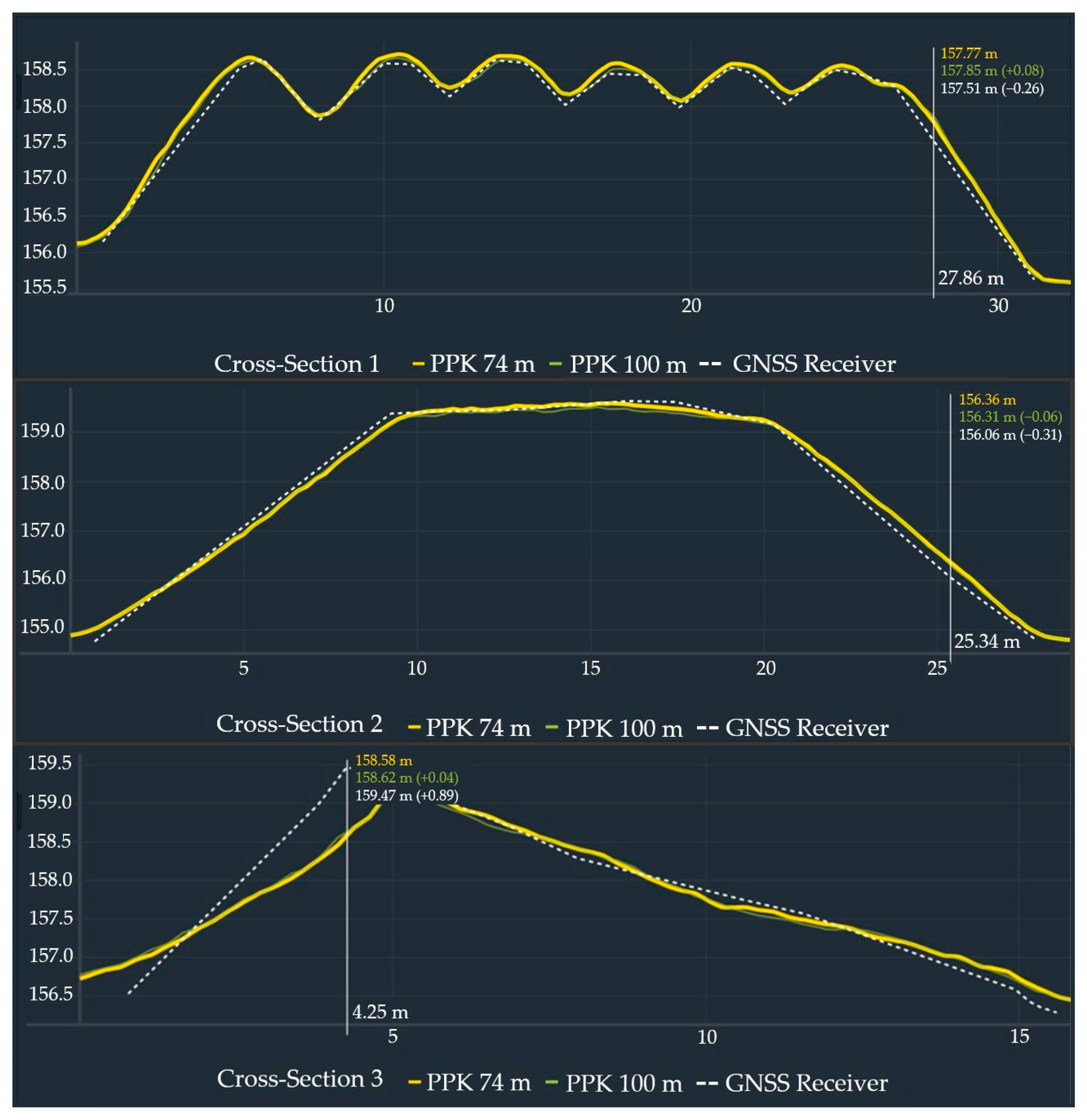
Figure 10.
Cross-sections of the three selected cross sections obtained through PPK surveys and Civil 3D design.
Figure 10.
Cross-sections of the three selected cross sections obtained through PPK surveys and Civil 3D design.
Figure 11.
Ground control points (GCPs)-based survey control points configurations in the testing site: (a) 8 GCP + 3 CHPs, (b) 6 GCPs + 5 CHPs, (c) 5 GCPs + 6 CHPs.
Figure 11.
Ground control points (GCPs)-based survey control points configurations in the testing site: (a) 8 GCP + 3 CHPs, (b) 6 GCPs + 5 CHPs, (c) 5 GCPs + 6 CHPs.
Figure 12.
Real Time Kinematic (RTK) survey control points configurations in the testing site: (a) 5 GCP + 3 CHPs, (b) 3 GCPs + 5 CHPs.
Figure 12.
Real Time Kinematic (RTK) survey control points configurations in the testing site: (a) 5 GCP + 3 CHPs, (b) 3 GCPs + 5 CHPs.
Figure 13.
Example of X and Y measurements in the reality mesh model. The centers across the images show GNSS receiver coordinates acquired on site—in the Trimble Stratus platform: (a) point no. 4, (b) point no. 5, (c) point no. 6; in Bentley Descartes application with mesh transparency set to 50%: (d) point no. 2, (e) point no. 4, (f) point no. 9.
Figure 13.
Example of X and Y measurements in the reality mesh model. The centers across the images show GNSS receiver coordinates acquired on site—in the Trimble Stratus platform: (a) point no. 4, (b) point no. 5, (c) point no. 6; in Bentley Descartes application with mesh transparency set to 50%: (d) point no. 2, (e) point no. 4, (f) point no. 9.
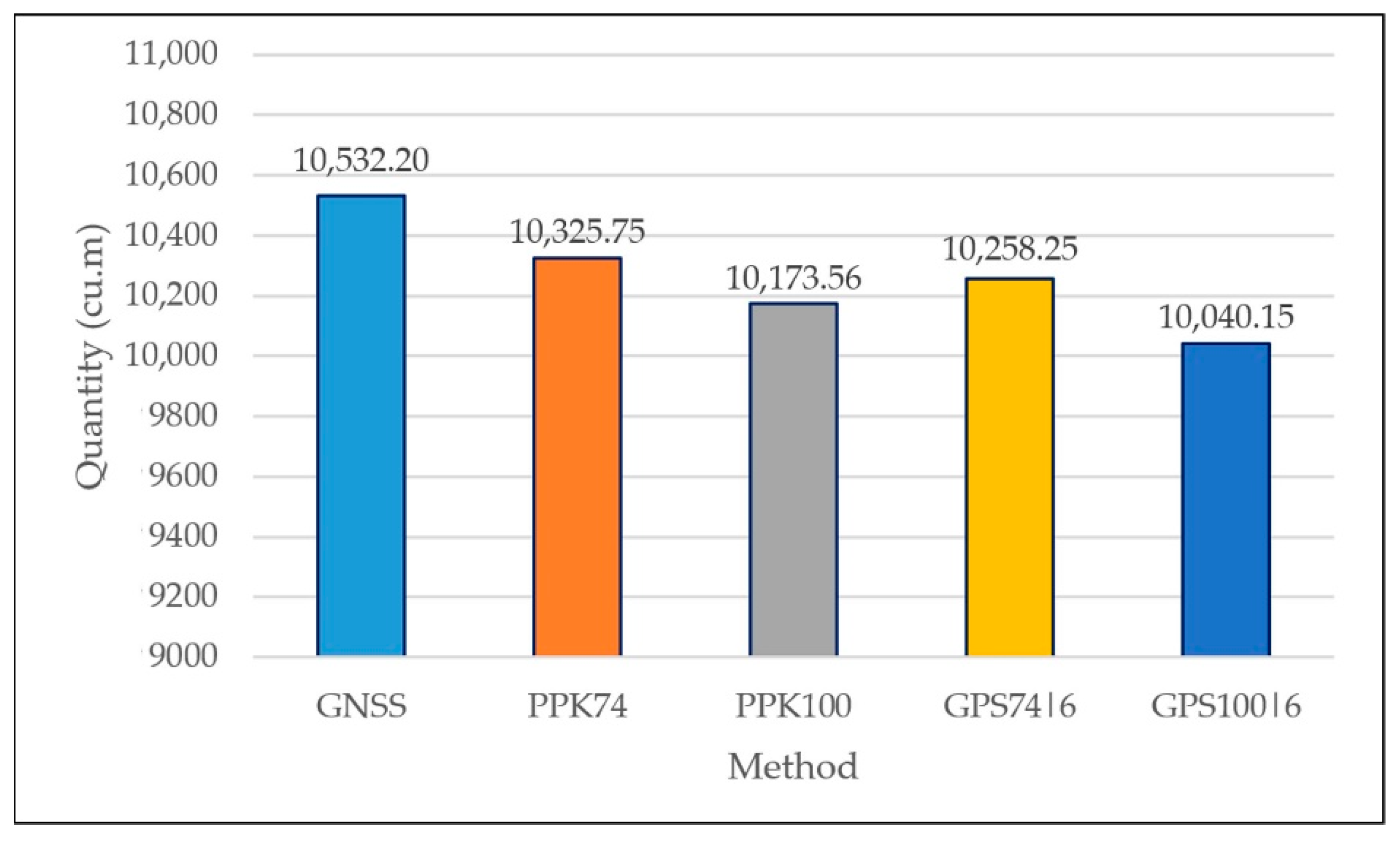
Figure 14.
Total volume comparison of 16 stockpiles.
Figure 14.
Total volume comparison of 16 stockpiles.
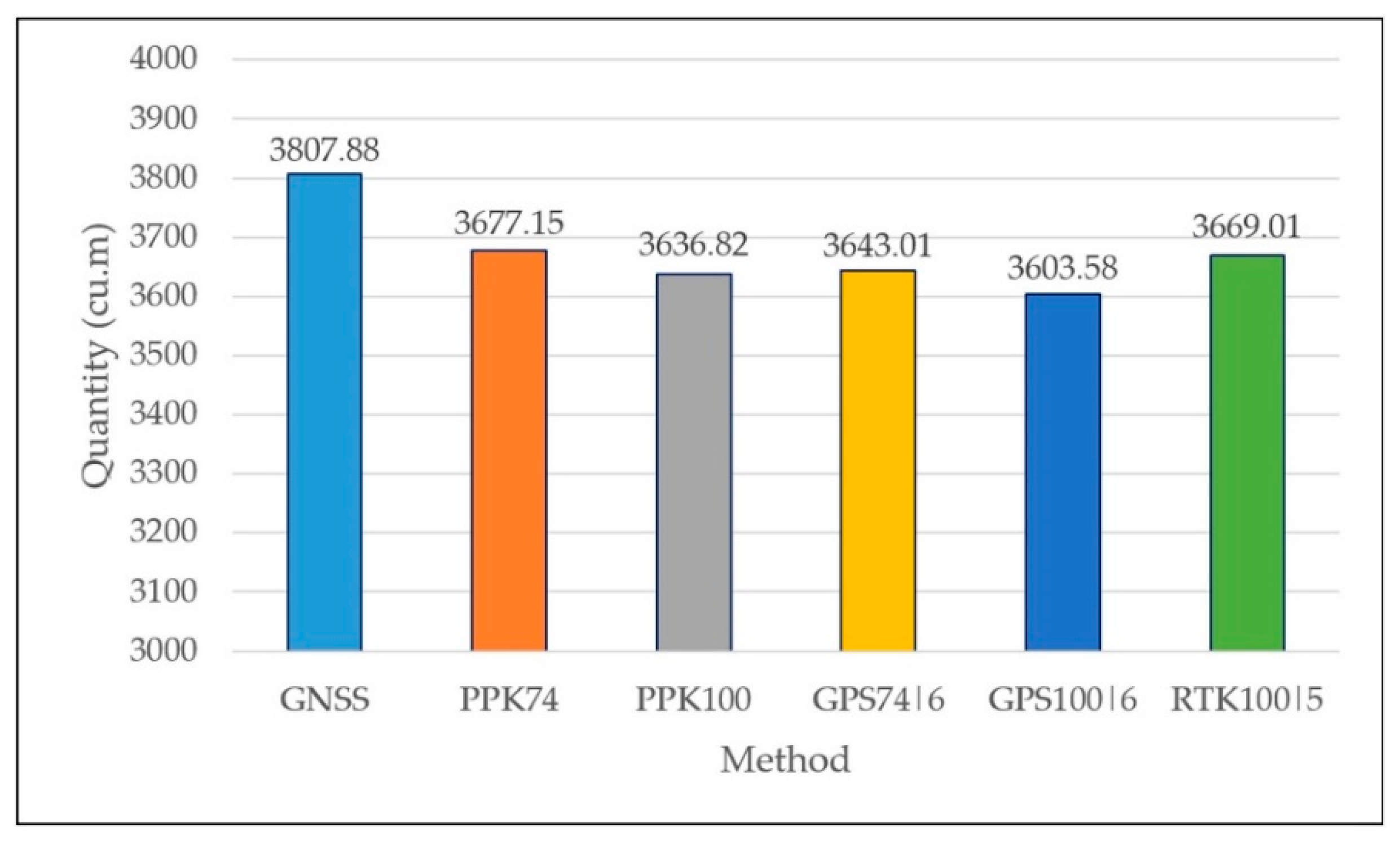
Figure 15.
Volume comparison of 5 stockpiles.
Figure 15.
Volume comparison of 5 stockpiles.
Figure 16.
Visual volume comparison of 5 stockpiles.
Figure 16.
Visual volume comparison of 5 stockpiles.
Figure 17.
GCPs and CHPs root mean square error (RMSE) values of PPK and 6 GCPs-based GPS datasets.
Figure 17.
GCPs and CHPs root mean square error (RMSE) values of PPK and 6 GCPs-based GPS datasets.
Figure 18.
RTK and PPK surveys results (smaller scale).
Figure 18.
RTK and PPK surveys results (smaller scale).
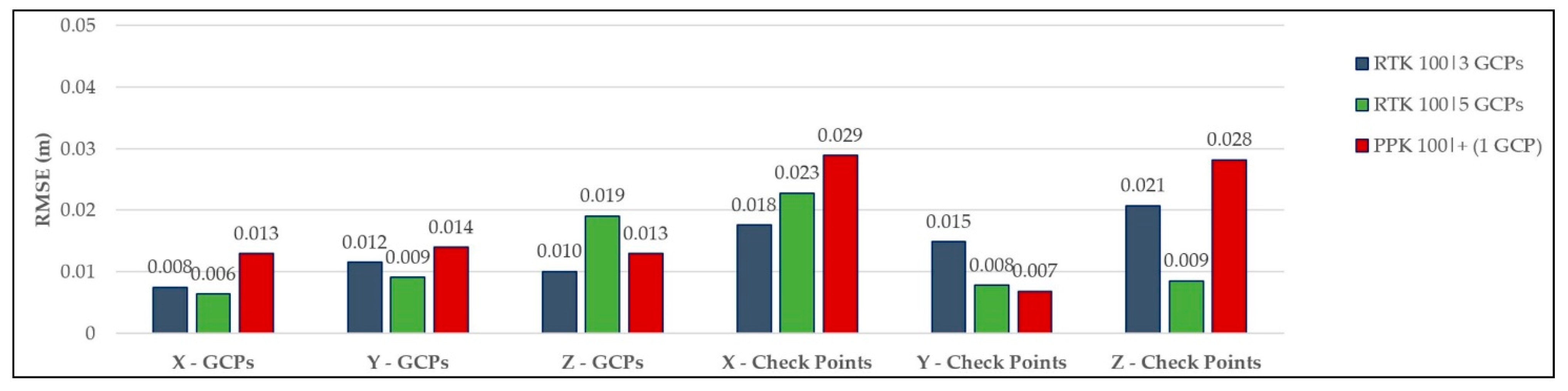
Figure 19.
PPK and RTK surveys GCPs and CHPs RMSE results.
Figure 19.
PPK and RTK surveys GCPs and CHPs RMSE results.
Figure 20.
Summary of vertical datums results between all analyzed methods.
Figure 20.
Summary of vertical datums results between all analyzed methods.
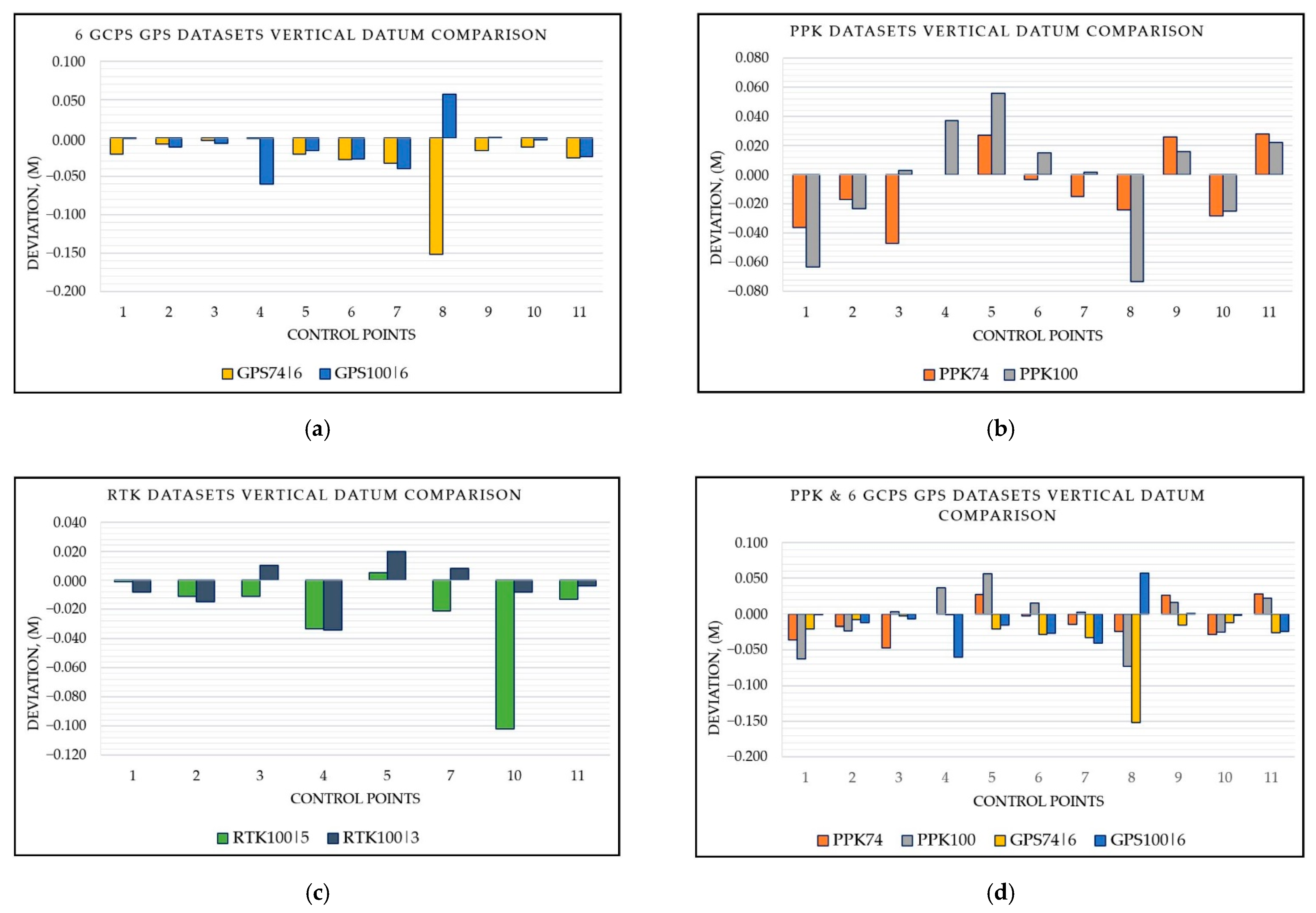
Figure 21.
Vertical control points analysis: (a) 6 GCPs-based GPS datasets, (b) 1 known point PPK datasets, (c) 3 and 6 GCPs-based RTK dataset, and (d) vertical datum comparison of PPK and 6 GCPs-based GPS datasets.
Figure 21.
Vertical control points analysis: (a) 6 GCPs-based GPS datasets, (b) 1 known point PPK datasets, (c) 3 and 6 GCPs-based RTK dataset, and (d) vertical datum comparison of PPK and 6 GCPs-based GPS datasets.
Table 1.
Summary of stockpiles quantities acquired by means of conventional method.
Table 1.
Summary of stockpiles quantities acquired by means of conventional method.
| Name | 2d Area (Sq. m) | Net (Cu. m) |
|---|
| Pile 1 | 87.66 | 91.95 |
| Pile 2 | 790.59 | 1407.86 |
| Pile 3 | 427.14 | 832.19 |
| Pile 4 | 1107.03 | 3046.91 |
| Pile 5 | 390.47 | 623.28 |
| Pile 6 | 316.83 | 475.5 |
| Pile 7 | 55.60 | 48.22 |
| Pile 8 | 102.60 | 115.7 |
| Pile 9 | 177.34 | 242.96 |
| Pile 10 | 53.27 | 36.21 |
| Pile 11 | 160.91 | 255.4 |
| Pile 12 | 184.48 | 228.59 |
| Pile 13 | 217.71 | 255.57 |
| Pile 14 | 166.90 | 175.31 |
| Pile 15 | 493.98 | 1185.39 |
| Pile 16 | 817.04 | 1511.13 |
| Total | 5549.55 | 10,532.18 |
Table 2.
Control points measurement information. Device—Trimble SPS985. Precision type—Real Time Kinematic (RTK) Fixed.
Table 2.
Control points measurement information. Device—Trimble SPS985. Precision type—Real Time Kinematic (RTK) Fixed.
| CP No | Northing, (Meters) | Easting, (Meters) | Elevation, (Meters) | H. Precision (Meters) | V. Precision (Meters) | HA/Lat (Deg.Min.Sec.) | VA/Long (Deg.Min.Sec.) | SD/WGSHt (Meters) |
|---|
| 1 | 6,050,236.702 | 556,234.258 | 162.661 | 0.008 | 0.013 | 54.35.0814518 | 24.52.1194348 | 187.901 |
| 2 | 6,050,043.436 | 555,982.149 | 159.556 | 0.008 | 0.013 | 54.35.0199501 | 24.51.5777158 | 184.801 |
| 3 | 6,049,904.339 | 555,953.424 | 159.463 | 0.008 | 0.014 | 54.34.5750764 | 24.51.5607667 | 184.71 |
| 4 | 6,050,013.152 | 556,105.802 | 157.799 | 0.009 | 0.015 | 54.35.0096623 | 24.52.0463640 | 183.043 |
| 5 | 6,049,966.717 | 556,230.278 | 156.111 | 0.009 | 0.016 | 54.34.5941459 | 24.52.1153583 | 181.355 |
| 6 | 6,049,781.284 | 556,206.66 | 155.857 | 0.01 | 0.018 | 54.34.5342656 | 24.52.1009295 | 181.104 |
| 7 | 6,049,821.187 | 556,140.183 | 152.67 | 0.01 | 0.018 | 54.34.5474372 | 24.52.0641886 | 177.917 |
| 8 | 6,049,656.291 | 556,080.627 | 157.837 | 0.01 | 0.017 | 54.34.4943427 | 24.52.0298929 | 183.087 |
| 9 | 6,049,755.716 | 556,125.198 | 157.208 | 0.011 | 0.016 | 54.34.5263218 | 24.52.0553941 | 182.456 |
| 10 | 6,049,807.246 | 556,330.669 | 158.154 | 0.01 | 0.014 | 54.34.5421658 | 24.52.1701592 | 183.399 |
| 11 | 6,049,985.528 | 556,330.097 | 155.408 | 0.01 | 0.015 | 54.34.5998302 | 24.52.1710714 | 180.651 |
Table 3.
74 m flight Post-Processing Kinematic (PPK) image tags.
Table 3.
74 m flight Post-Processing Kinematic (PPK) image tags.
| Flight | Start | End | Images | Flight Duration | GPS Quality |
|---|
| Flight 1 | 9 July 2020, 12:29 PM | 9 July 2020, 12:48 PM | 450 | 19 min | 100.00% |
| Flight 2 | 9 July 2020, 12:51 PM | 9 July 2020, 1:09 PM | 433 | 18 min | 100.00% |
Table 4.
100 m flight PPK image tags.
Table 4.
100 m flight PPK image tags.
| Flight | Start | End | Images | Flight Duration | GPS Quality |
|---|
| Flight 1 | 9 July 2020, 1:19 PM | 9 July 2020, 1:36 PM | 392 | 17 min | 100.00% |
Table 5.
16 stockpiles volume calculations results.
Table 5.
16 stockpiles volume calculations results.
| Stockpile Number | Stockpile Volumes in Cubic Meters Obtained through Each Method |
|---|
| GNSS Receiver | PPK | 6 GCPs-Based |
|---|
| Ground Level | 74 m Height | 100 m Height | 74 m Height | 100 m Height |
|---|
| 1 | 91.95 | 96.95 | 94.57 | 95.09 | 94.95 |
| 2 | 1407.86 | 1285 | 1254 | 1280.17 | 1273.18 |
| 3 | 832.19 | 791 | 775 | 797.65 | 791.79 |
| 4 | 3046.91 | 3210 | 3187 | 3119.22 | 3003.53 |
| 5 | 623.28 | 598 | 582 | 650.09 | 639.56 |
| 6 | 475.5 | 421 | 413 | 430.66 | 411.46 |
| 7 | 48.22 | 51.65 | 49.17 | 50.8 | 49.1 |
| 8 | 115.73 | 117 | 114 | 114.65 | 114.44 |
| 9 | 242.96 | 239 | 236 | 236.13 | 229 |
| 10 | 36.21 | 35.15 | 32.82 | 36.35 | 36 |
| 11 | 255.4 | 236 | 230 | 226.56 | 223.05 |
| 12 | 228.59 | 210 | 194 | 219.38 | 219.19 |
| 13 | 255.57 | 266 | 266 | 267.28 | 253.86 |
| 14 | 175.31 | 157 | 153 | 161.34 | 154.25 |
| 15 | 1185.39 | 1101 | 1094 | 1060.42 | 1053.92 |
| 16 | 1511.13 | 1511 | 1499 | 1512.46 | 1492.87 |
Table 6.
Comparison on 5 selected stockpiles volume calculations.
Table 6.
Comparison on 5 selected stockpiles volume calculations.
| Stockpile Number | GNSS Receiver | PPK | 6 GCPs-Based | RTK |
|---|
| Ground Level | 74 m Height | 100 m Height | 74 m Height | 100 m Height | 100 m Height |
|---|
| 3 | 832.19 | 791 | 775 | 797.65 | 791.79 | 800.72 |
| 9 | 242.96 | 239 | 236 | 236.13 | 229 | 237.29 |
| 10 | 36.21 | 35.15 | 32.82 | 36.35 | 36 | 35.31 |
| 15 | 1185.39 | 1101 | 1094 | 1060.42 | 1053.92 | 1068.88 |
| 16 | 1511.13 | 1511 | 1499 | 1512.46 | 1492.87 | 1526.81 |
Table 7.
Root mean square error (RMSE) values for 11 ground check points.
Table 7.
Root mean square error (RMSE) values for 11 ground check points.
| Method | X (m) | Y (m) | Z (m) |
|---|
| 1 known point PPK 74 m | 0.023 | 0.028 | 0.026 |
| 1 known point PPK 100 m | 0.026 | 0.024 | 0.038 |
| 6 GCPs-based GPS 74 m | 0.018 | 0.020 | 0.050 |
| 6 GCPs-based GPS 100 m | 0.015 | 0.014 | 0.030 |
| 5 GCPs-based GPS 74 m | 0.017 | 0.017 | 0.434 |
| 5 GCPs-based GPS 100 m | 0.026 | 0.011 | 0.256 |
| 8 GCPs-based GPS 74 m | 0.010 | 0.010 | 0.047 |
| 8 GCPs-based GPS 100 m | 0.010 | 0.009 | 0.021 |
Table 8.
RMSE values for 10 points (with point number 8 eliminated).
Table 8.
RMSE values for 10 points (with point number 8 eliminated).
| Method | X (m) | Y (m) | Z (m) |
|---|
| 1 known point PPK 74 m | 0.023 | 0.029 | 0.026 |
| 1 known point PPK 100 m | 0.027 | 0.020 | 0.033 |
| 6 GCPs-based GPS 74 m | 0.018 | 0.012 | 0.020 |
| 6 GCPs-based GPS 100 m | 0.015 | 0.014 | 0.026 |
| 5 GCPs-based GPS 74 m | 0.007 | 0.018 | 0.297 |
| 5 GCPs-based GPS 100 m | 0.026 | 0.012 | 0.222 |
| 8 GCPs-based GPS 74 m | 0.011 | 0.009 | 0.049 |
| 8 GCPs-based GPS 100 m | 0.010 | 0.005 | 0.021 |
Table 9.
Ground control points (GCPs) and check points (CHPs) RMSE values for 10 points (with Point number 8 eliminated).
Table 9.
Ground control points (GCPs) and check points (CHPs) RMSE values for 10 points (with Point number 8 eliminated).
| Method | Ground Control Points | Check Points |
|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) |
|---|
| 1 known point PPK 74 m | 0.013 | 0.016 | 0.000 | 0.024 | 0.030 | 0.028 |
| 1 known point PPK 100 m | 0.019 | 0.002 | 0.037 | 0.028 | 0.021 | 0.032 |
| 6 GCPs-based GPS 74 m | 0.004 | 0.009 | 0.018 | 0.028 | 0.016 | 0.022 |
| 6 GCPs-based GPS 100 m | 0.001 | 0.007 | 0.012 | 0.023 | 0.021 | 0.039 |
| 5 GCPs-based GPS 74 m | 0.008 | 0.018 | 0.237 | 0.007 | 0.018 | 0.347 |
| 5 GCPs-based GPS 100 m | 0.004 | 0.003 | 0.022 | 0.037 | 0.016 | 0.313 |
| 8 GCPs-based GPS 74 m | 0.005 | 0.008 | 0.016 | 0.018 | 0.014 | 0.085 |
| 8 GCPs-based GPS 100 m | 0.007 | 0.009 | 0.023 | 0.016 | 0.008 | 0.014 |
Table 10.
RTK and PPK RMSE values.
Table 10.
RTK and PPK RMSE values.
| Method | X (m) | Y (m) | Z (m) |
|---|
| 3 GCPs-based RTK 100 m | 0.027 | 0.013 | 0.016 |
| 5 GCPs-based RTK 100 m | 0.013 | 0.020 | 0.039 |
| 1 known point PPK 100 m | 0.026 | 0.009 | 0.026 |
Table 11.
RTK and PPK RMSE values after removing one point.
Table 11.
RTK and PPK RMSE values after removing one point.
| Method | X (m) | Y (m) | Z (m) |
|---|
| 3 GCPs-based RTK 100 m | 0.014 | 0.014 | 0.017 |
| 5 GCPs-based RTK 100 m | 0.013 | 0.009 | 0.017 |
| 1 known point PPK 100 m | 0.026 | 0.009 | 0.026 |
Table 12.
PPK and RTK surveys GCPs and CHPs RMSE results.
Table 12.
PPK and RTK surveys GCPs and CHPs RMSE results.
| Method. | Ground Control Points | Check Points |
|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) |
|---|
| 3 GCPs-based RTK 100 m | 0.008 | 0.012 | 0.010 | 0.018 | 0.015 | 0.021 |
| 5 GCPs-based RTK 100 m | 0.006 | 0.009 | 0.019 | 0.023 | 0.008 | 0.009 |
| 1 known point PPK 100 m | 0.013 | 0.014 | 0.013 | 0.029 | 0.007 | 0.028 |

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}