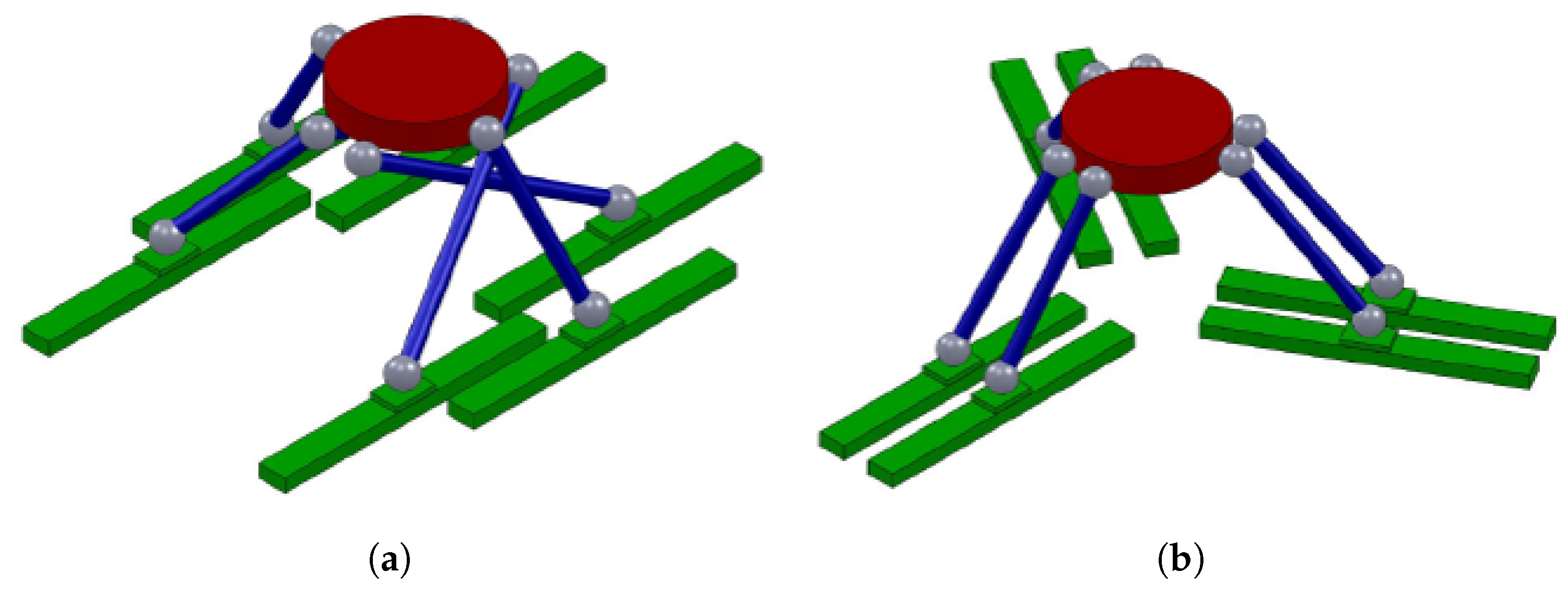
The most promising solution within the three families is the six-PUS configuration because the actuation system lays on the floor grounded; moreover, the vertical bulk is limited as opposed to the horizontal one. This topology has been selected in order to guarantee high performance in terms of dynamic response and structural properties with the view to reduce the size vertically. Within this category, the two manipulators shown in
Figure 3 have been chosen and evaluated [
5]. The first one is called Hexaglide, having parallel linear guides and therefore is characterized by symmetry with respect to the longitudinal median plane. The second is called Hexaslide and is characterized by a radial symmetry with respect to the vertical axis due to the radial distribution of the linear guides in the plane. This characteristic leads to a better isotropy of the workspace.
2.1. Kinetostatic Optimization
An optimization process [
5] is required in order to synthesize the geometric parameters of the two chosen robot architectures and evaluate which is the best solution. To properly set up the process, it is first necessary to identify the geometric parameters characterizing the two architectures and thereafter a function that mathematically describes the goal to be achieved. Finally, a set of physical constraints affecting the system have to be identified and defined in mathematical form in order to create the numeric boundaries for the solution. When choosing the number of parameters to be optimized, a trade-off has to be found: if the number of parameters used to characterize a machine is increased, the whole process of optimization would benefit, thus allowing a higher freedom. However, the complexity of the machine increases dramatically. A trade-off needs to be found between global performance and structural modularity, which is critical in order to simplify design and optimization steps.
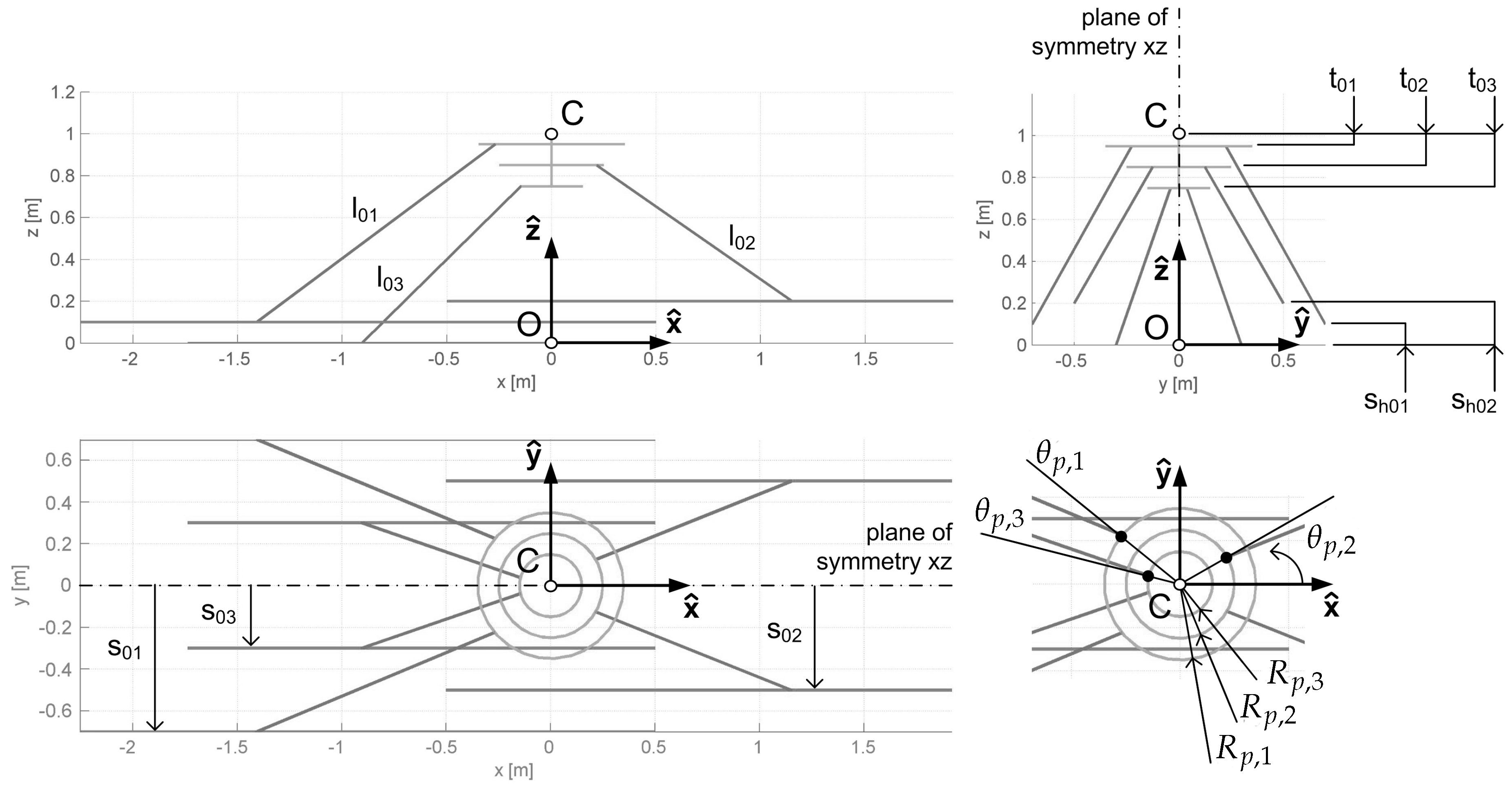
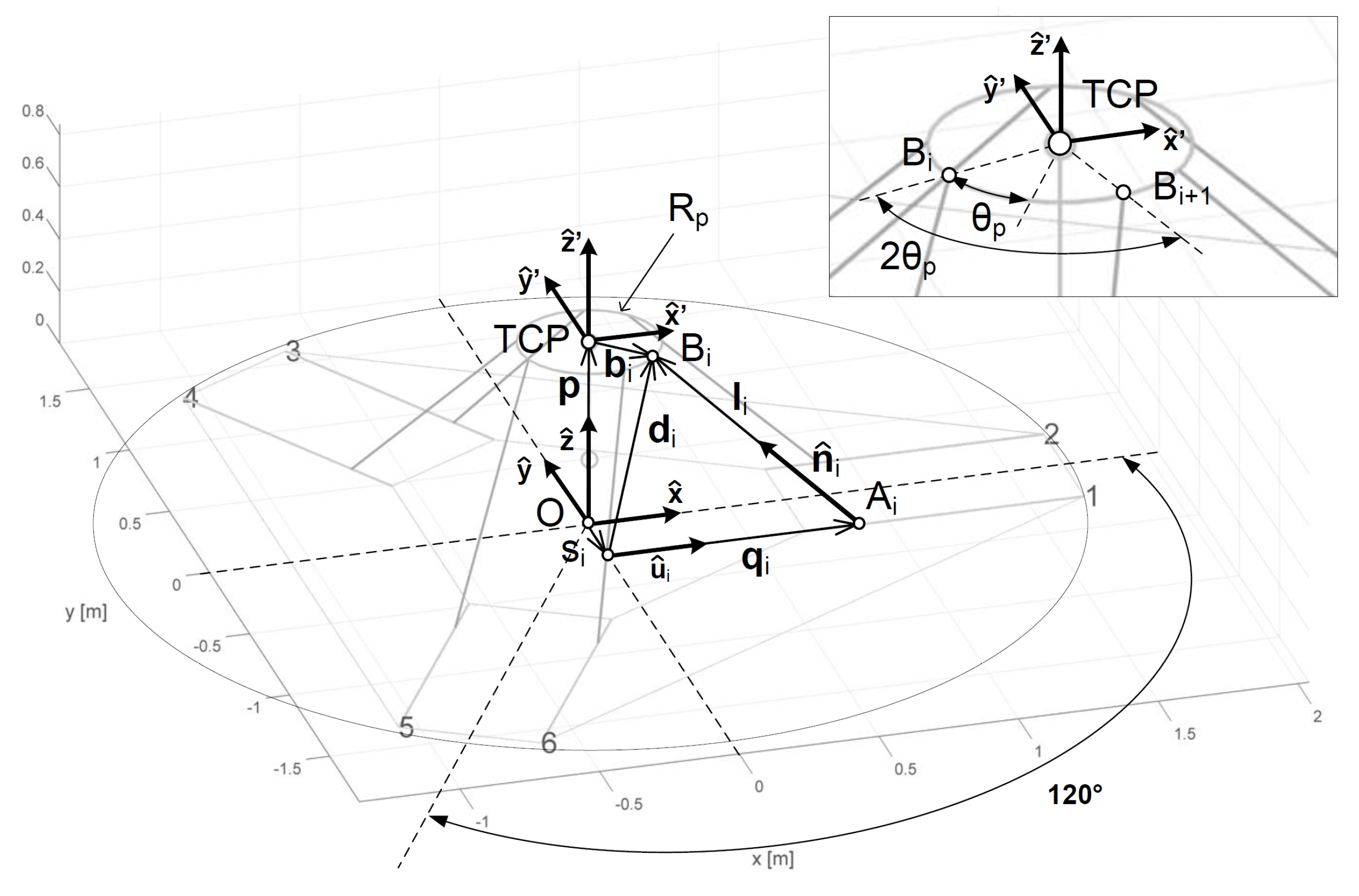
The Hexaslide architecture can be analysed taking into consideration the following parameters (
Figure 4) for the optimization process:
s: semi-distance between two parallel guides;
: length of the links;
: radius of the circumference on which the platform joint centres are located;
: semi-angular aperture between the two segments connecting the origin of the Tool Center Point (TCP) reference frame and a couple of platform joints;
: height of the centre of the desired workspace.
For this architecture, the same kinematic chain is replicated identically for six times.
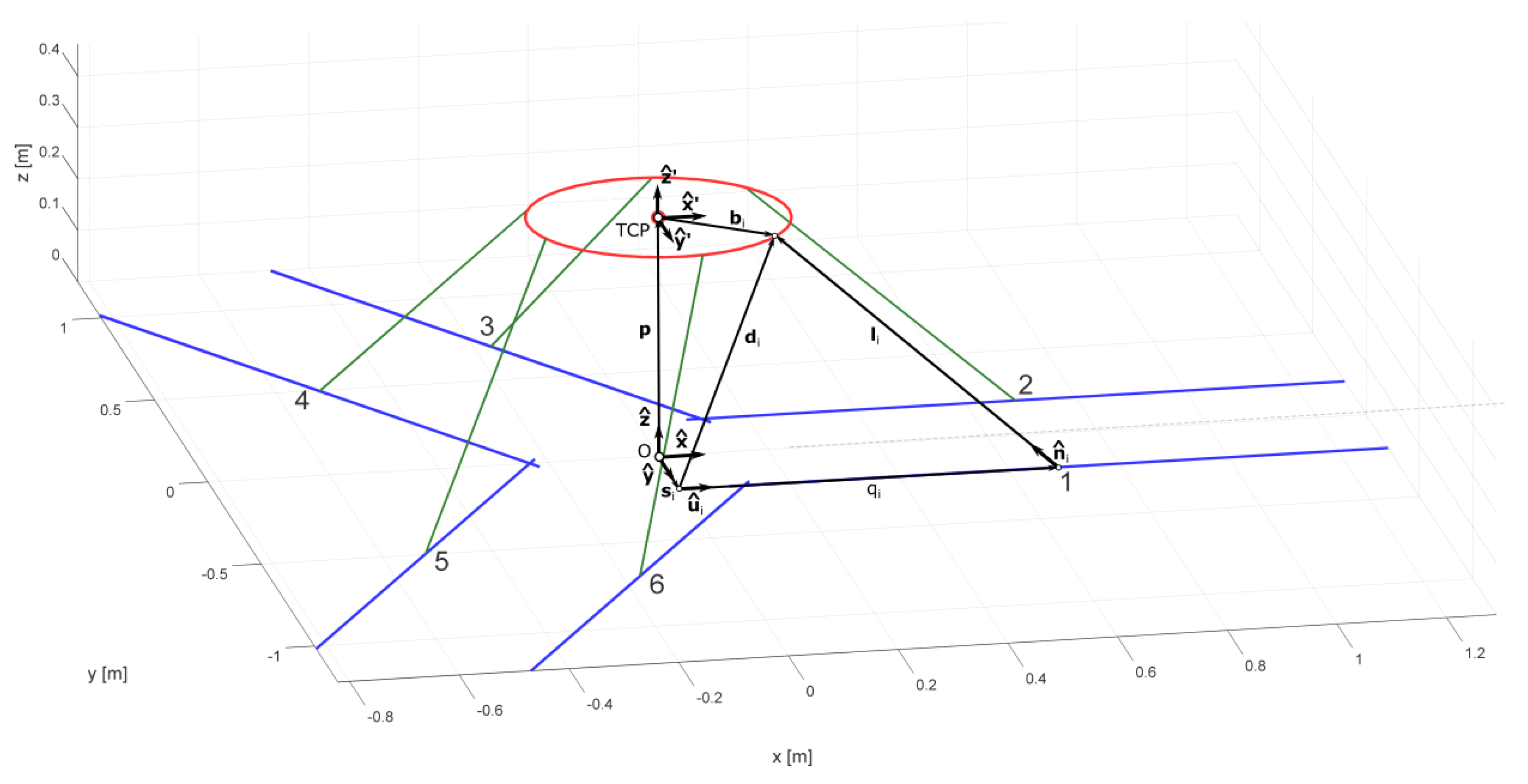
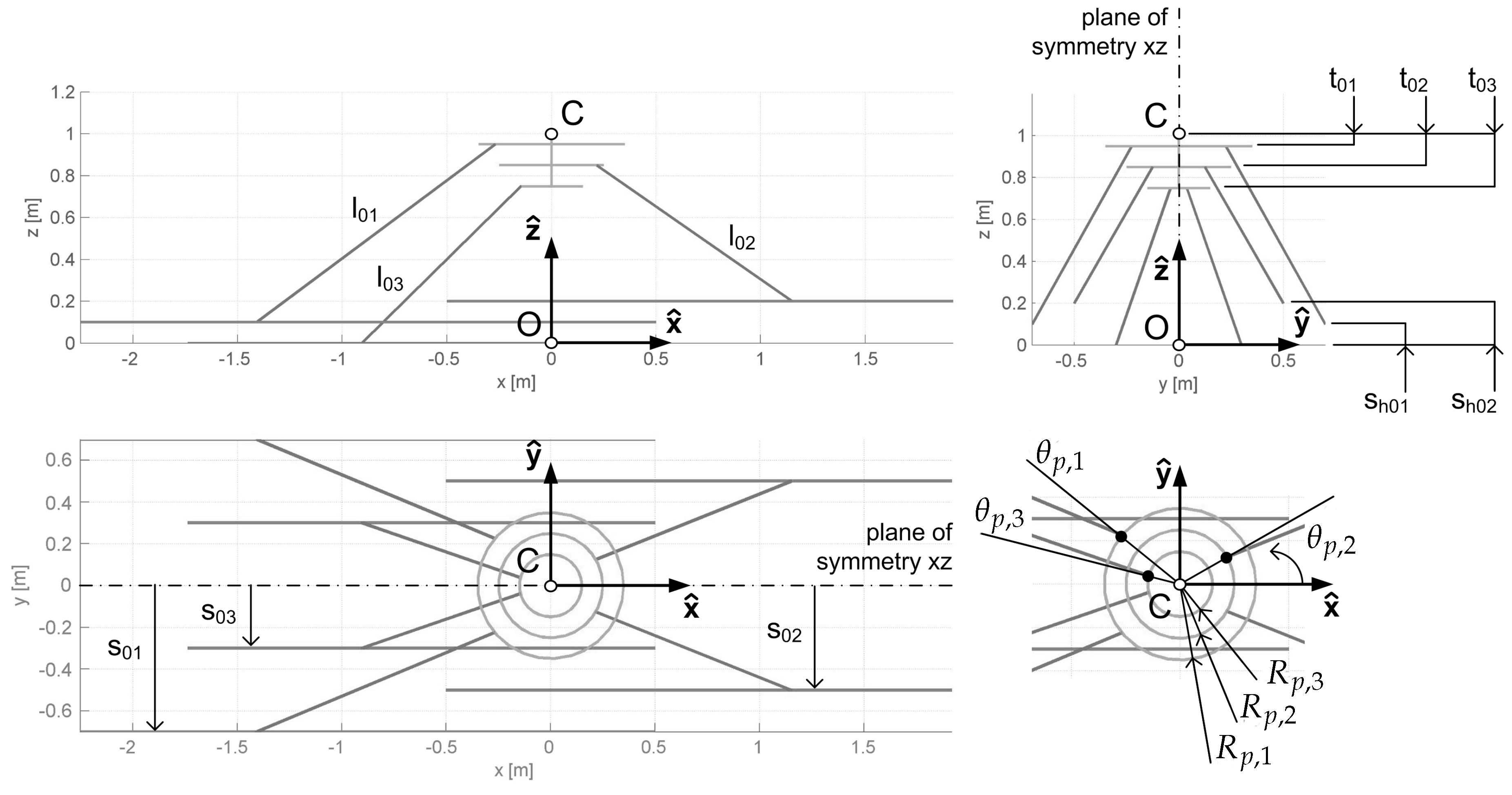
The Hexaglide architecture, shown in
Figure 5, can be analysed considering a higher number of parameters because three different kinematic chains can be identified in the robot configuration. The parameters to be optimized are:
: radius of the circumference on which the platform joints 1 and 2 are located;
: radius of the circumference on which the platform joints 3 and 4 are located;
: radius of the circumference on which the platform joints 5 and 6 are located;
: semi-angular aperture between the two segments connecting the origin of the TCP reference frame and platform joints 1 and 2;
: semi-angular aperture between the two segments connecting the origin of the TCP reference frame and platform joints 3 and 4;
: semi-angular aperture between the two segments connecting the origin of the TCP reference frame and platform joints 5 and 6;
: vertical distance between TCP and the plane where platform joints 1 and 2 lie;
: vertical distance between TCP and the plane where platform joints 3 and 4 lie;
: vertical distance between TCP and the plane where platform joints 5 and 6 lie;
: length of links 1 and 2;
: length of links 3 and 4;
: length of links 5 and 6;
: semi-distance between parallel guides 1 and 2;
: semi-distance between parallel guides 3 and 4;
: semi-distance between parallel guides 5 and 6;
, : vertical distance between ground and parallel guides;
: height of the center of the desired workspace.
For this architecture, each kinematic chain is replicated twice, one on both sides of the longitudinal median plain of symmetry.
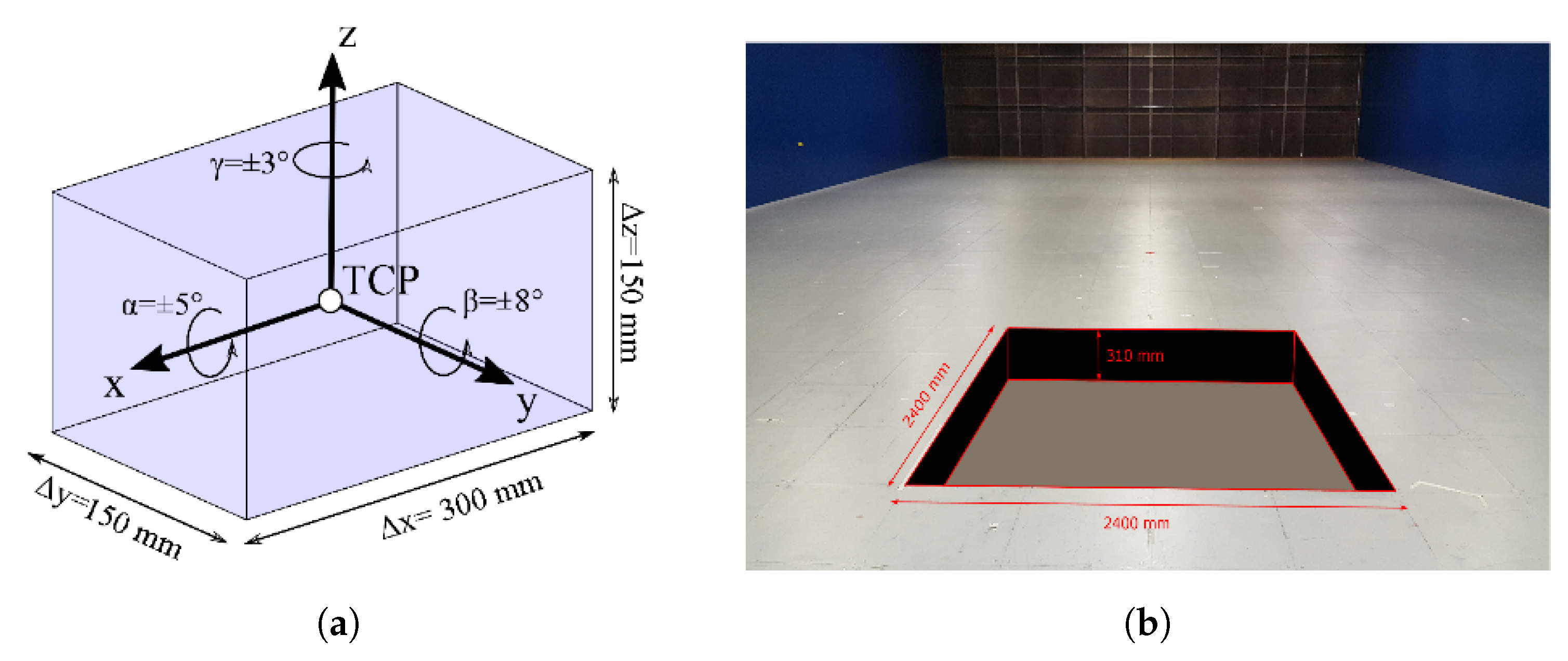
The goal is to optimize robot kinematic performance while ensuring the desired workspace boundaries. In order to define a proper objective function, the desired workspace is discretized in elementary volumes: for each elementary volume, the specific set of parameters under analysis must be allowed to reach its centre point. Moreover, for each centre point analysed, the resulting machine must be able to orientate the TCP with any possible combination of pitch, roll and jaw angles varying inside a predefined range. If that is not the case, the elementary volume is added to the total volume that the current set of parameters is not able to cover. In order to make the computational cost affordable and restrict the checks to a finite amount of angles combinations, the three angular ranges are discretized. The evaluation of the objective-function is performed firstly by fixing the mobile-platform orientation
, and thereafter computing the part of volume that end-effector is unable to reach for these specific orientations, such as:
where the combination of parameters
i,
j,
k unequivocally identify a check-point of the workspace in which
,
,
represent the number of discretization points, respectively, along the
x,
y,
z axes. The variable
is equal to 1 if the specific parameters prevent the end-effector from reaching the pose defined by
i,
j,
k and
, and 0, otherwise. The term
is the elementary volume resulting from the discretization of the workspace.
This procedure is repeated for all combinations of pitch, roll and jaw angles and the resulting value for the objective-function
is computed as:
Even if a volume portion is discarded for only one specific orientation, that portion of workspace is excluded for the corresponding geometrical configuration. Using this approach, in the ideal case in which a set of parameters allows the robot to reach any point in the workspace regardless of its orientation, the objective-function would be equal to 0. On the other hand, if the set of parameters does not allow the reaching of a particular point of the workspace, the objective function would assume a value equal to the dimension of the single discrete volume times the number of orientations for which that volume has been discarded.
The kinematic capability of reaching each point with every possible orientation is not in itself enough, but additional constraint definitions are required. The kinematic constraints are defined as follows:
Distance between the i-th platform joint and the corresponding base joint should not exceed the length of the link for geometric congruence;
Each actuated joint coordinate has to be comprised within a range defined by the dimension of the machine, since actuators’ stroke range have a direct impact on the major bulk direction of the machine, longitudinal for the Hexaglide, and radial for the Hexaslide;
Each passive joint, both platform and base ones, should respect their respective mobility ranges.
The kinetostatic constraints are defined by the transmission ratio between forces and moments acting on the end-effector and the actuation forces. This transmission ratio for each actuator is computed and the maximum should be lower than a prescribed limit value. As is common for PKMs, this transmission ratio varies considerably within the nominal workspace due to nonlinear kinematics, especially in proximity of the singular configurations. The geometric constraints enforce the respect of the minimum distance between two links and between a link and the mobile platform in order to avoid the problem of self-collision of the component for particular poses.
The solution related to the minimisation of the objective function has been obtained through a single objective genetic algorithm approach [
6]. The use of a semi-stochastic search and the evaluation of the performance of different individuals at each iteration makes the process of finding the global minimum of the objective-function to be minimized, easier. The steps characterizing this kind of algorithm are:
Choice of a sufficiently high number of individuals representing a generation in order to have a significant statistical sample;
Evaluation of the performance for each individual of the current generation depending on the values assumed by its genes;
Choice of the group with the better performance that will constitute the elite and will pass unchanged to the next generation;
Creation of a new generation based on elitary choice, crossover and mutation;
Computation of the performance of the individuals of the new generation in comparison to the goal desired.
The algorithm would keep modifying parameters trying to cover the desired workspace as much as possible and minimizing the defined objective function. In
Table 1 and
Table 2, the lower and upper bounds imposed at the beginning of the optimization and the optimal values obtained are reported.
Minimum distance between the links, minimum distance between links and platform, transmission ratio and maximum and minimum strokes of the actuated joint coordinates are mapped throughout the workspace to guide one in the choice of the best architecture. The following conclusions hold respectively for the Hexaslide and Hexaglide.
Hexaslide:
Topology: both the height and the in plane bulkiness of the manipulator are quite limited. When the robot is in the home position, the links are arranged in such a way that a good compromise is achieved between the capacity to generate velocity in all directions and to bear external forces without too much effort required by the actuators.
Link-to-link and link-to-platform minimum distances: The link-to-platform minimum distance recorded is above 270 mm throughout the workspace, thus avoiding any risk of collision between the legs.
Force transmission ratio: the worst case obtained by the computation is closed to the limit value of 5 but restricted to only a few small lower regions of the workspace.
Actuated joints maximum and minimum stroke: as the joints coordinate distance with respect to the global reference frame is always positive, it is sufficient to check the maximum value in order to evaluate the bulkiness of the robot. This joint coordinate excursion is about 1 m.
Hexaglide
Topology: The in plane bulkiness of this robot is much higher with respect to the Hexaslide. Moreover, the centre of the desired workspace in the optimized configuration is placed in a higher position compared to the Hexaslide configuration.
Link-to-link and link-to-platform minimum distances: no risk of self-collision between the elements has been detected.
Force transmission ratio: the transmission ratio remains limited above 2.5.
Maximum and minimum stroke: the bulkiness of this solution is higher compared to the Hexaglide one.
It can thus be concluded that Hexaslide architecture is more compact compared to Hexaglide but reaches higher values of force transmission ratio. The Hexaslide architecture has been chosen due to its lower vertical bulkiness, more compact in plane dimensions, better workspace isotropy and lower position of the workspace centre. All of these features make it possible to install the machine under the wind tunnel floor level, reducing the robot influence on the air flow quality and keeping the turbine farther from the wind tunnel ceiling. Moreover, Hexaslide offers two additional advantages: all the elements that make up the links are the same for all six of the kinematic chains and the radial symmetry simplifies the design process. Hereafter, this machine will be referred to as Hexafloat, while the term Hexaslide will refer to the specific architecture of the robot.
2.2. Kinematics Analysis
In order to develop the optimisation problem and design the control algorithm of the robot, it is necessary to solve the inverse and forward kinematics. In this section, for the sake of briefness, only the solution of the inverse and forward kinematic problem of the robot architecture chosen is presented.
2.2.1. Inverse Kinematics (IK)
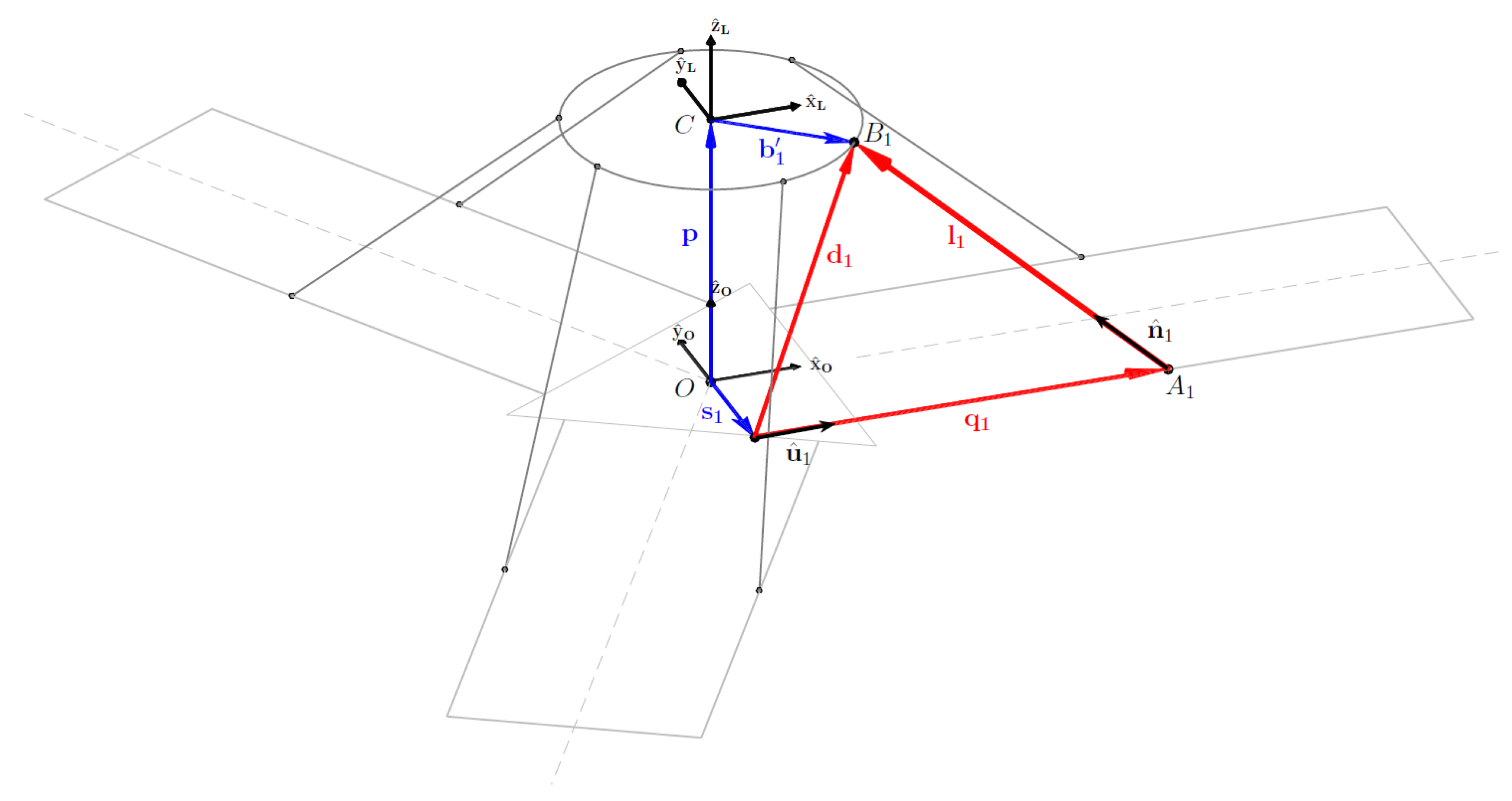
In order to study
Inverse Kinematics, two different reference frames have been considered, the global one and the local one with origin in the TCP and built into the robot platform. With reference to
Figure 6, two different vector closures for each kinematic chain can be set up in order to compute the joint coordinates vector
q. The first vector closure allows one to determine the absolute position vector
of the platform joint
with respect to a point that is the intersection of the
direction with its orthogonal plane passing through the global origin. Each
has a fixed length with different orientations in the
-
plane:
where
is the rotation matrix defining the platform orientation. This matrix is used to transform the expression of
, constant into a rotating local reference frame, in its equivalent with respect to a zero orientation local frame translating with the platform. Position vector
and the offset
complete the transformation from the zero orientation local frame to the global one. The second vector closure allows one to determine the position of the i-th slider on the guide:
The magnitude of vector corresponds to the length of the robot leg while represents the guide direction unitary vector. This procedure is identical, except for the orientation of , and , for all six links of the robot.
2.2.2. Forward Kinematics (FK)
The Hexafloat robot will not be equipped with sensors able to directly measure the platform position and orientation, therefore a good quality FK could work as a virtual sensor for the pose of the robot. A high frequency estimation of the actual pose of the TCP would be a valuable feedback tool for the other controller in the HIL setup, but a short calculation time and overall stability, in the case of numerical algorithms, is crucial. Extensive research has been conducted to ascertain analytical methods to solve the FK of PKMs, especially for Gough–Steward configuration, but the pose of the robot has not been expressed in explicit form so far.
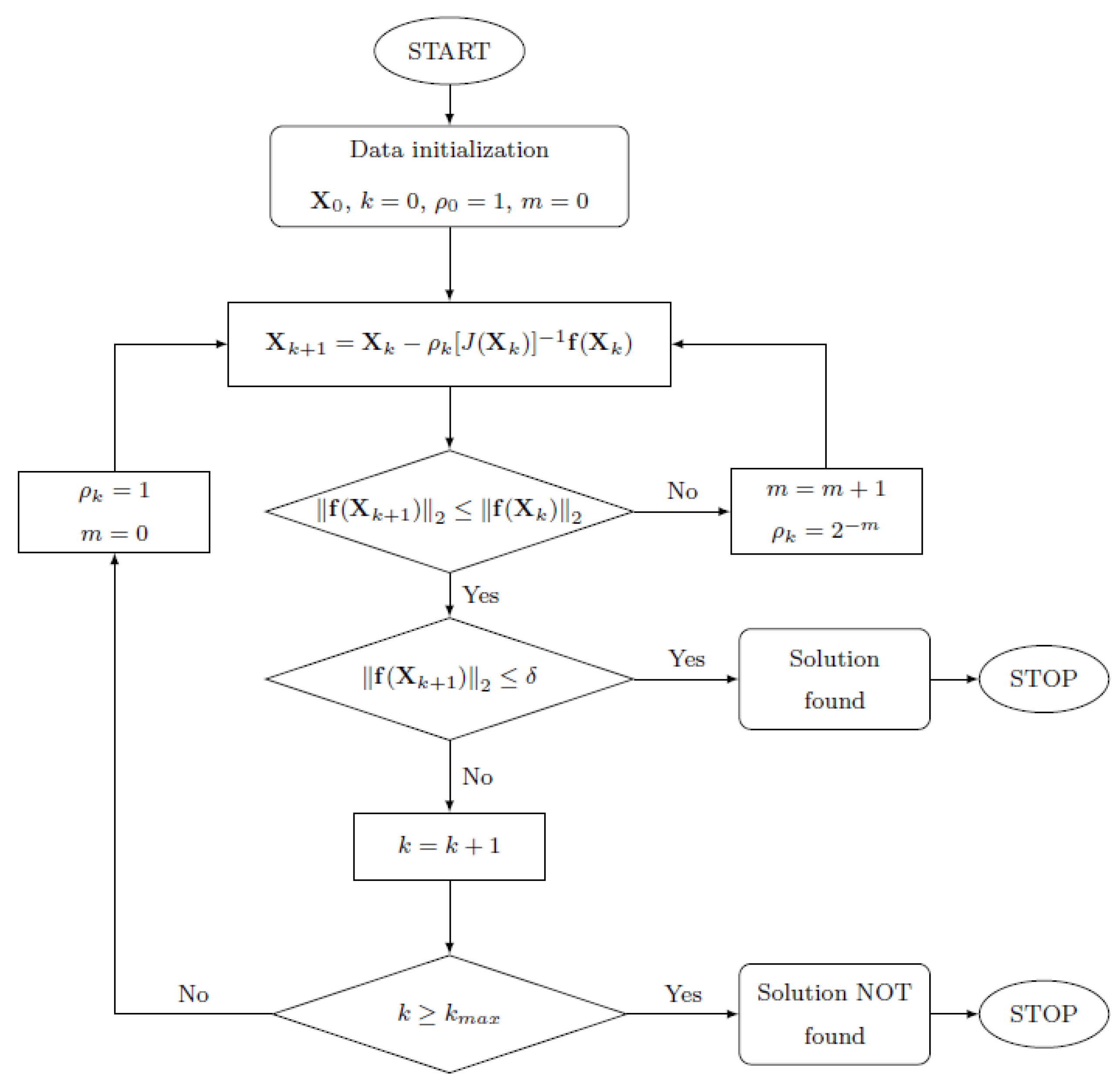
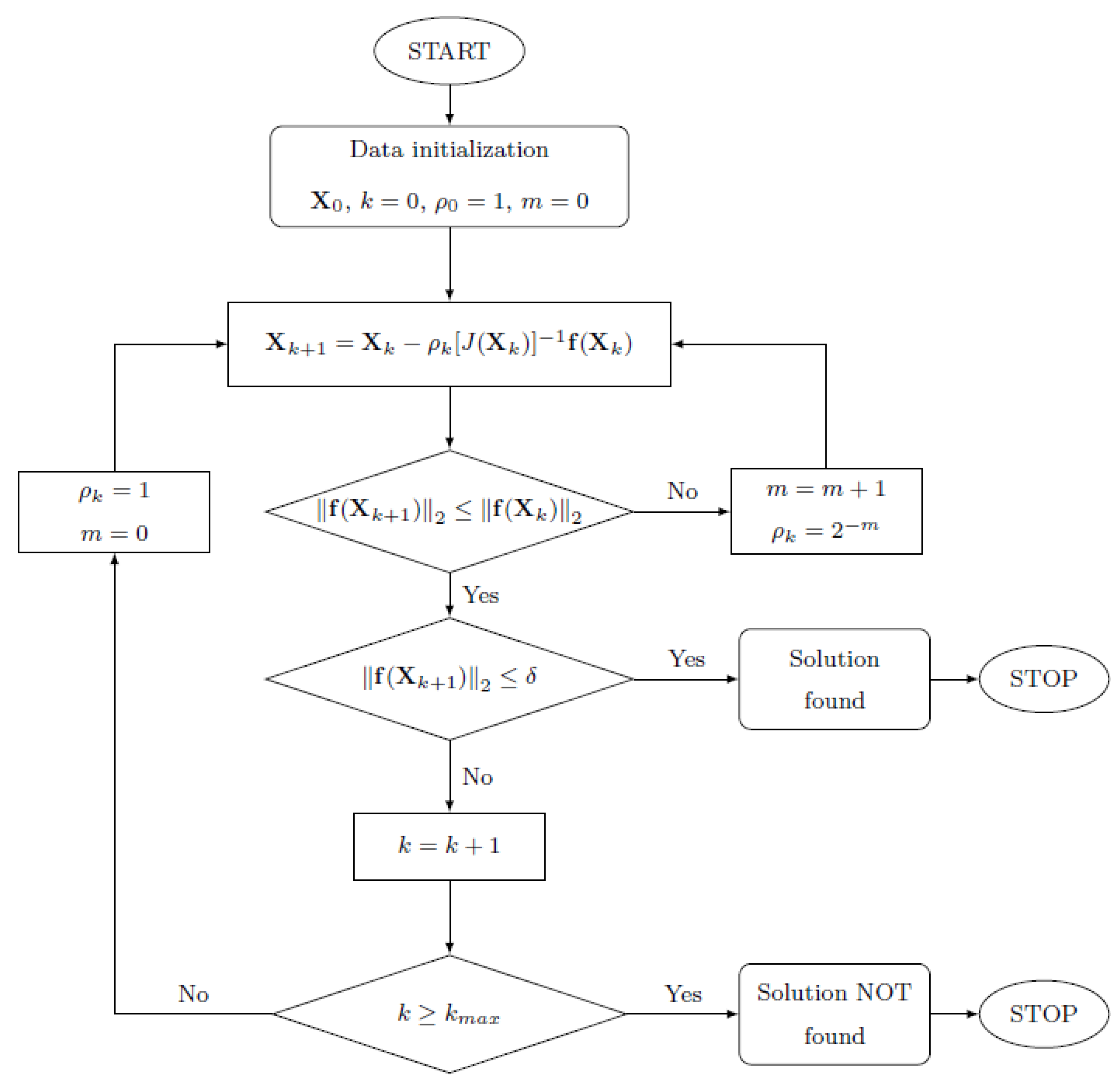
Considering numerical methods, the Newton–Raphson (NR) algorithm has its numerical stability highly dependent on the accuracy of the initial approximation of the solution vector so a monotonic descent operator can be added obtaining the so-called Modified-Global-Newton–Raphson (MGNR) algorithm, able to estimate the FK solution of six-DoF parallel robots for any initial approximation in the non-singular workspace without divergence. The algorithm requires the definition of a system of six nonlinear equations and the evaluation of a matrix of partial derivatives:
The evaluation of partial derivatives matrix can be simplified by implementing Jacobian-Free-Monotonic-Descendent (JFMD) algorithm. A first-order Taylor expansion can be used to approximate the partial derivatives matrix in a numerical way. The JFMD method is implemented via the following steps:
The first initial approximation must be taken close to the Home Position (
mm from the ground reference frame), where the robot is supposed to be when switched on. For the following times, the initial approximation is chosen as the estimated pose at the previous cycle. The logic of the JFMD algorithm is clarified in the flow chart in
Figure 7. Thanks to C language implementation, this routine is able to converge to a solution in relative little iteration, with a mean calculation time of around 50
s in the actual hardware chosen to control the robot. This performance allows one to use FK as a virtual real-time sensor with sufficient accuracy.
2.3. Velocity Analysis and Kinetostatic
In order to determine the relation between the velocity of the TCP and the ones of the joint coordinates, it is necessary to calculate the Jacobian matrix. If all six links are considered together, a compact matrix form coupling the joint velocity vector
and the workspace velocity vector
w can be defined:
and with some algebraic steps:
The solution of the kinetostatic analysis provides the actuation forces
required to bear the external forces
applied to the TCP. Due to the virtual work principle and knowing that the virtual variation of the workspace coordinates is related to the virtual variation of the joint coordinates through the Jacobian matrix
, the actuation forces can be computed as:
The representation of the way in which forces applied to the robot platform are transmitted to the actuators is obtained considering the unitary hypersphere of forces in the workspace [
7]. This unitary hypersphere is transformed into a hyper-ellipsoid in the space of actuation forces. This is a common description used in the robotic field in order to characterise the behaviour of the robot in every point of the working space and it states that, if one of the forces applied to the TCP reaches the maximum value of 1, the other components must be nil. An alternative representation is based on the use of a hyper-cube of unitary semi-side that is transformed into a hyper-polyhedron through the Jacobian matrix, as shown in
Figure 8. Moreover, it should be noted that the inverse Jacobian matrix can be split into a translational and a rotational part as presented in [
8]. Using this approach, it is possible to note that the rotational components of the inverse Jacobian matrix are dimensional and in fact they correspond to a length. In order to let all the elements of the inverse Jacobian matrix be dimensionless, it is useful to divide the rotational components by a scale factor defined as characteristic length
. In this way, a normalized inverse Jacobian matrix is obtained and is used to obtain the maximum actuation force.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}