VETO: An Immersive Virtual Environment for Tele-Operation

 and
and 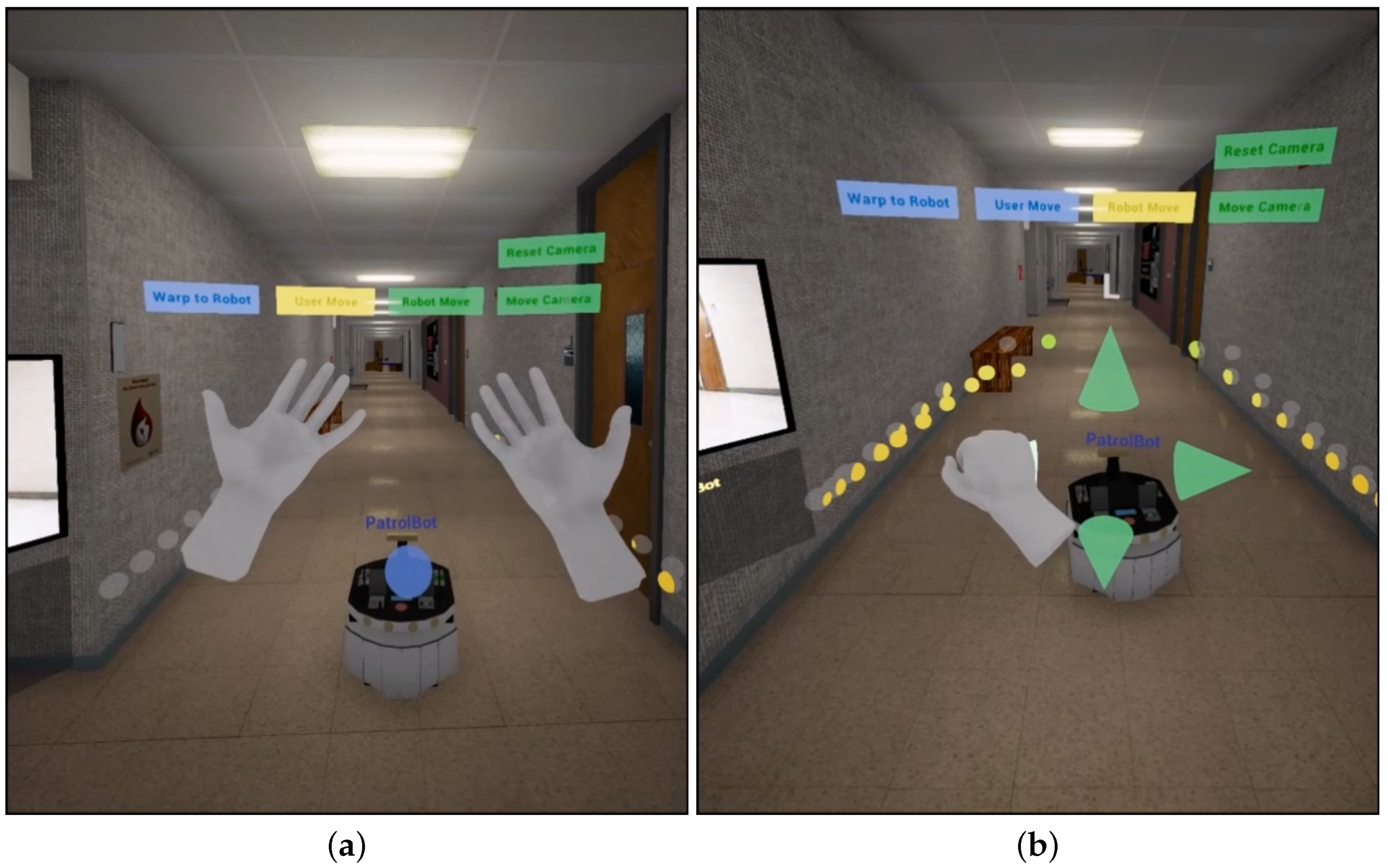{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Unreal Engine 4 Integration
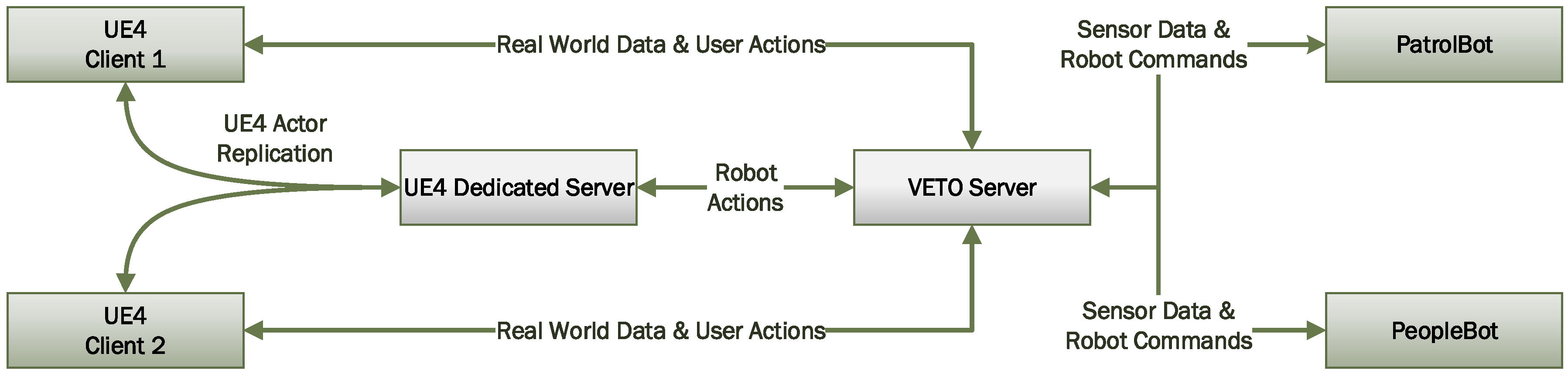
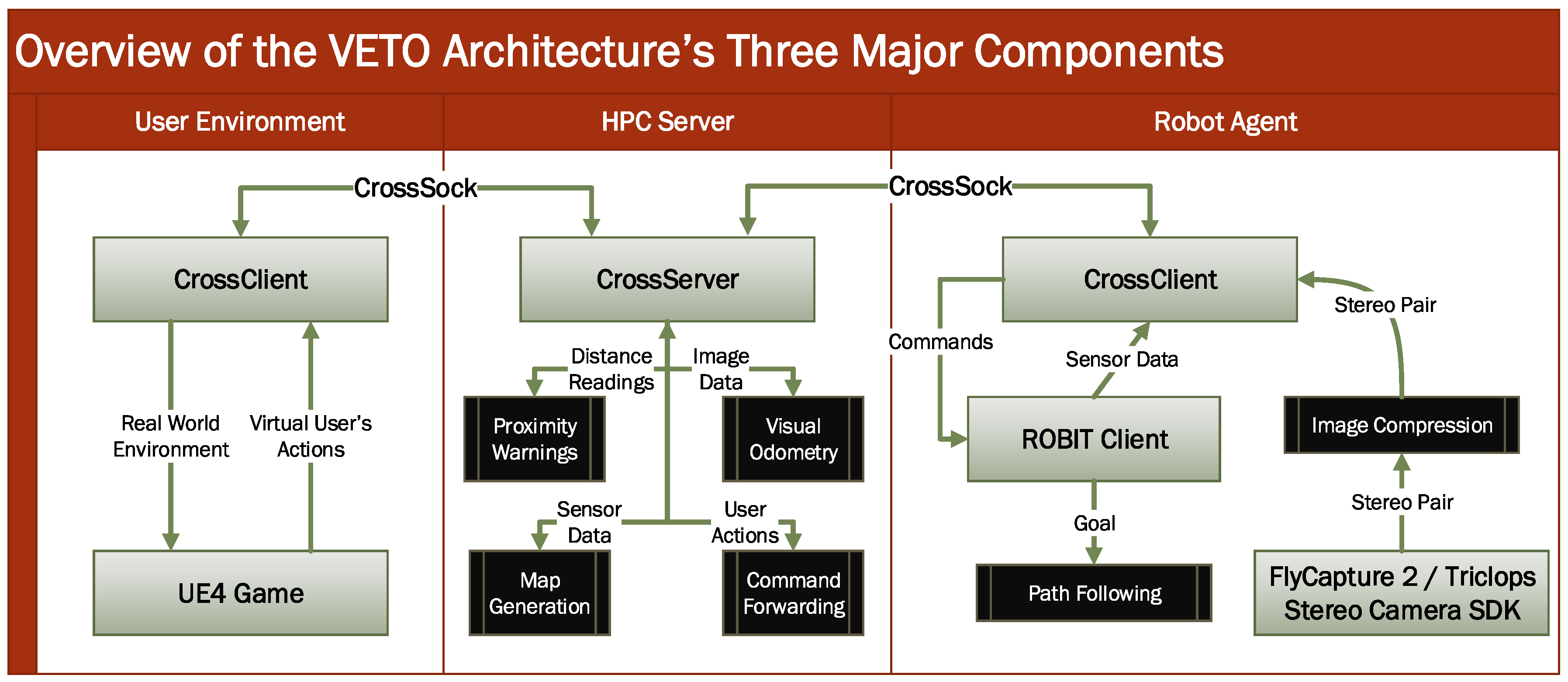
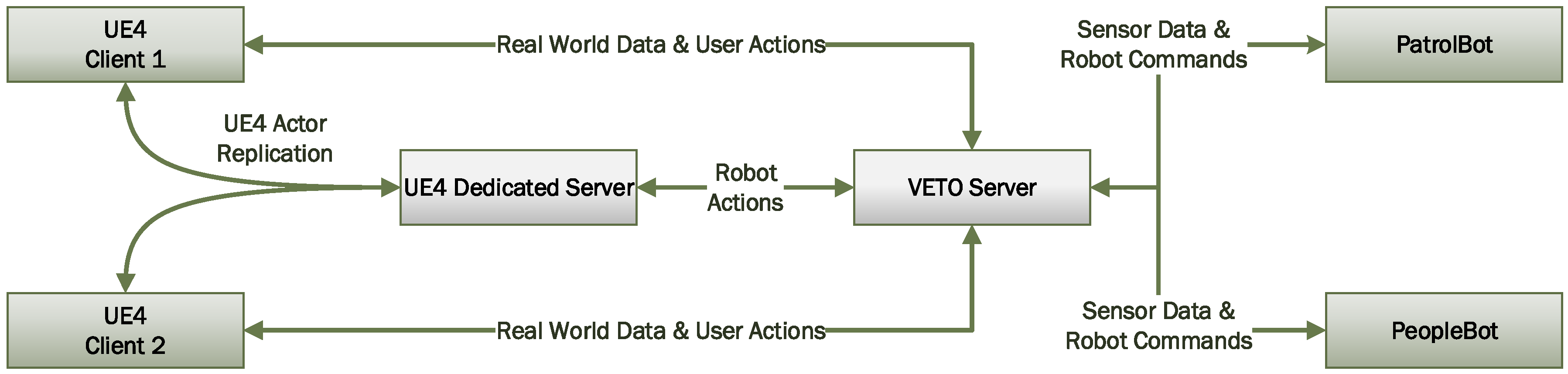
1.2. The VETO Architecture
1.3. Networking Communication
1.4. Dynamic Level Generation
2. Literature Review
3. Immersive User Interfaces and Virtual Environments for Tele-operation
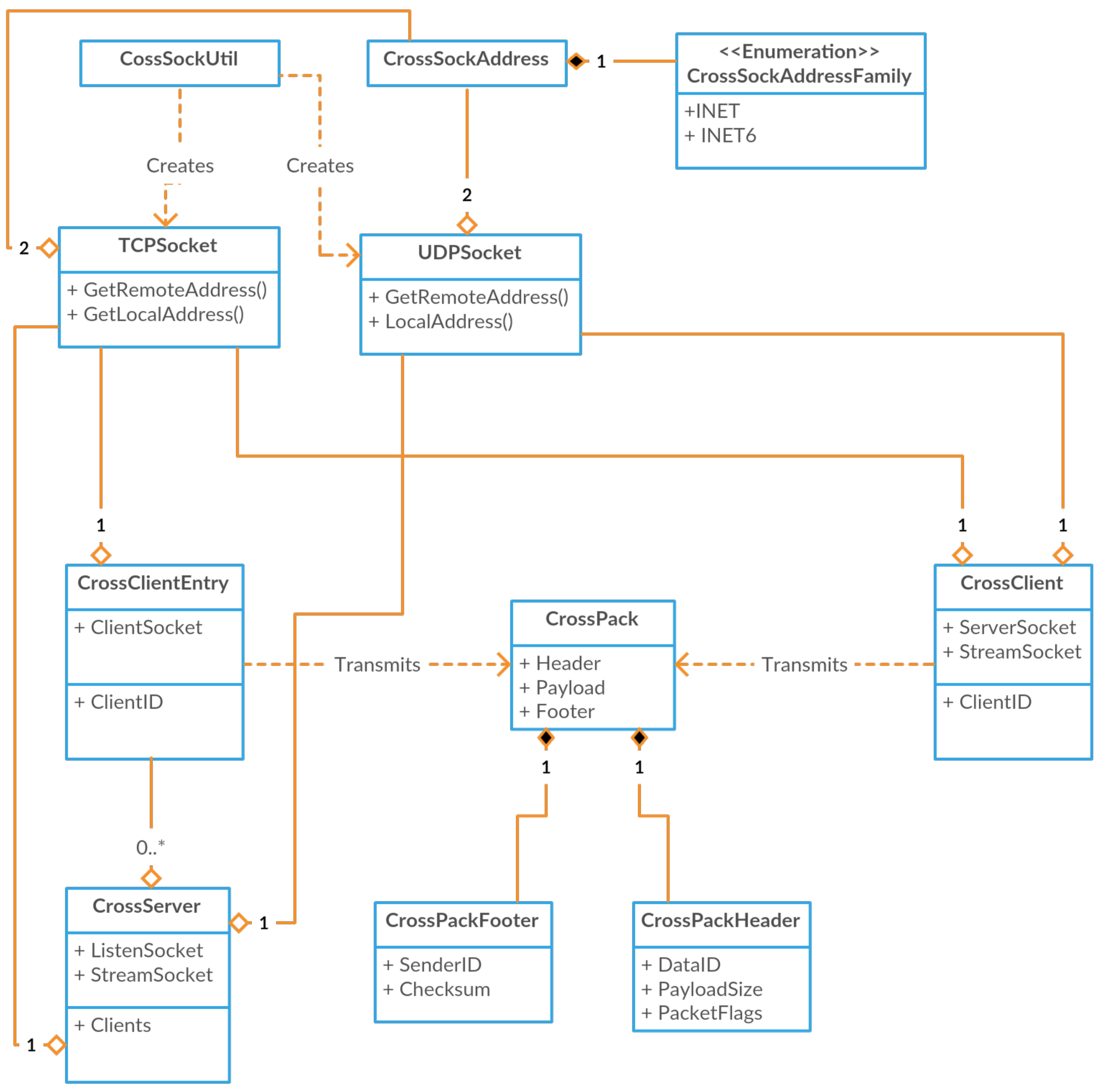
4. The CrossSock Networking API
4.1. The CrossSock API
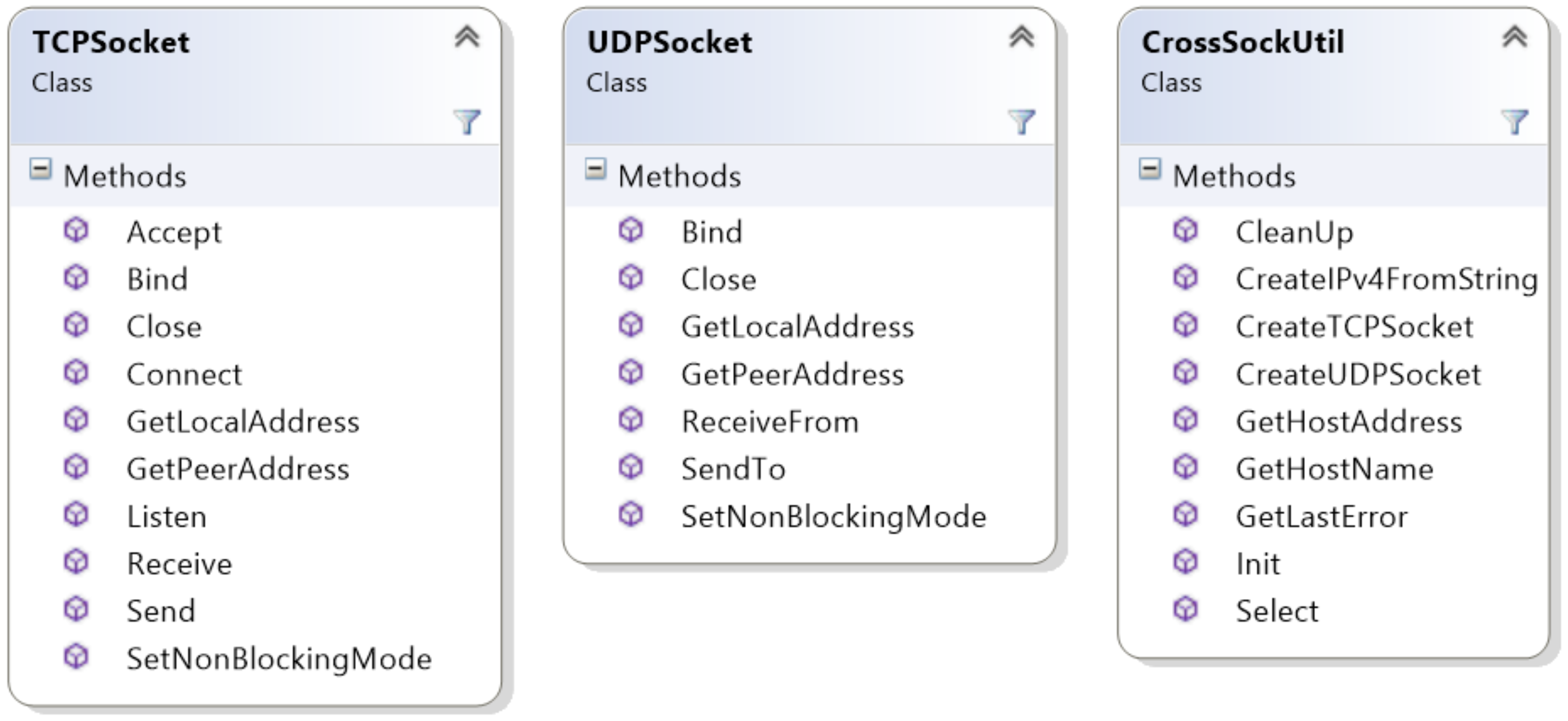
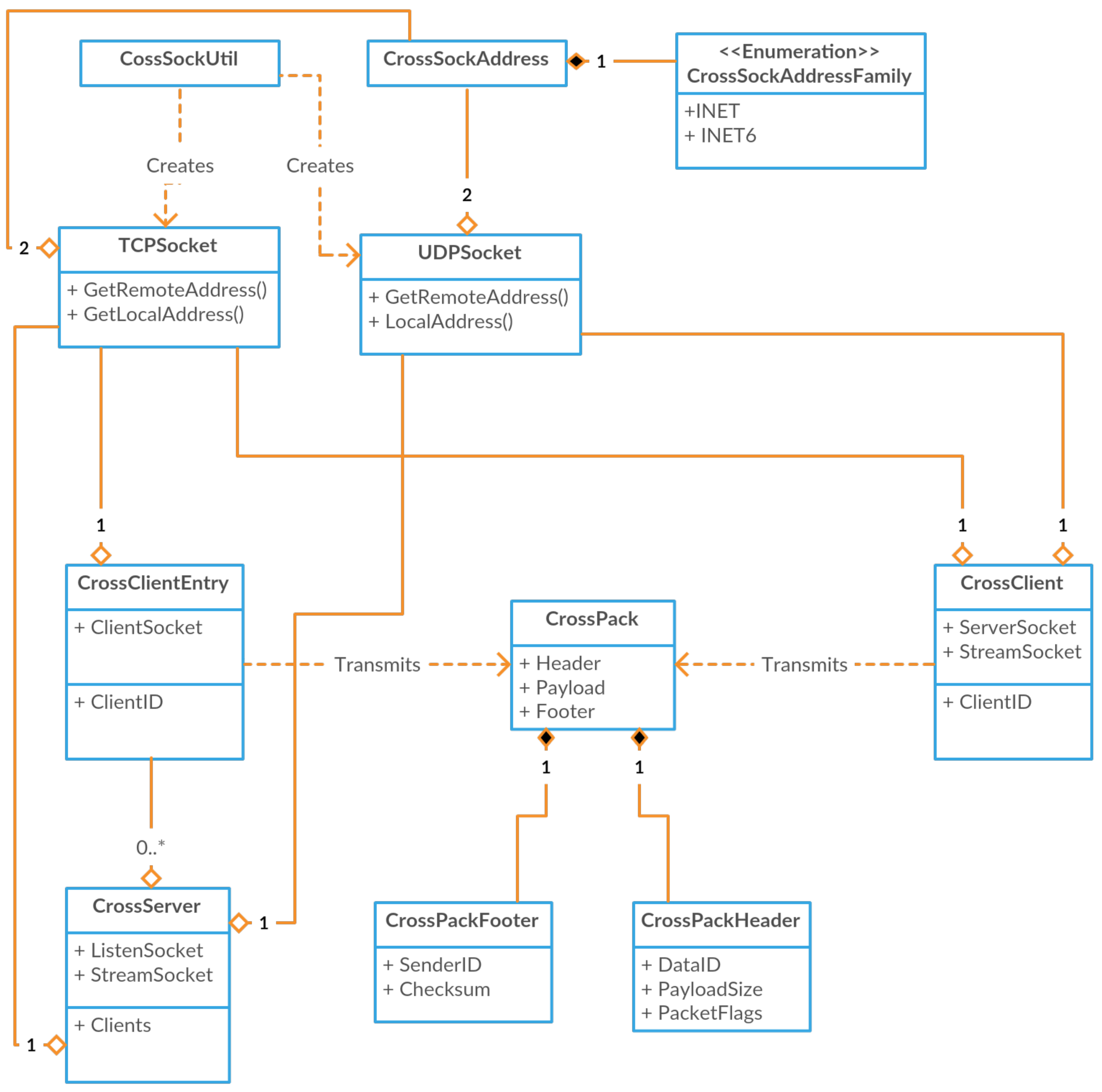
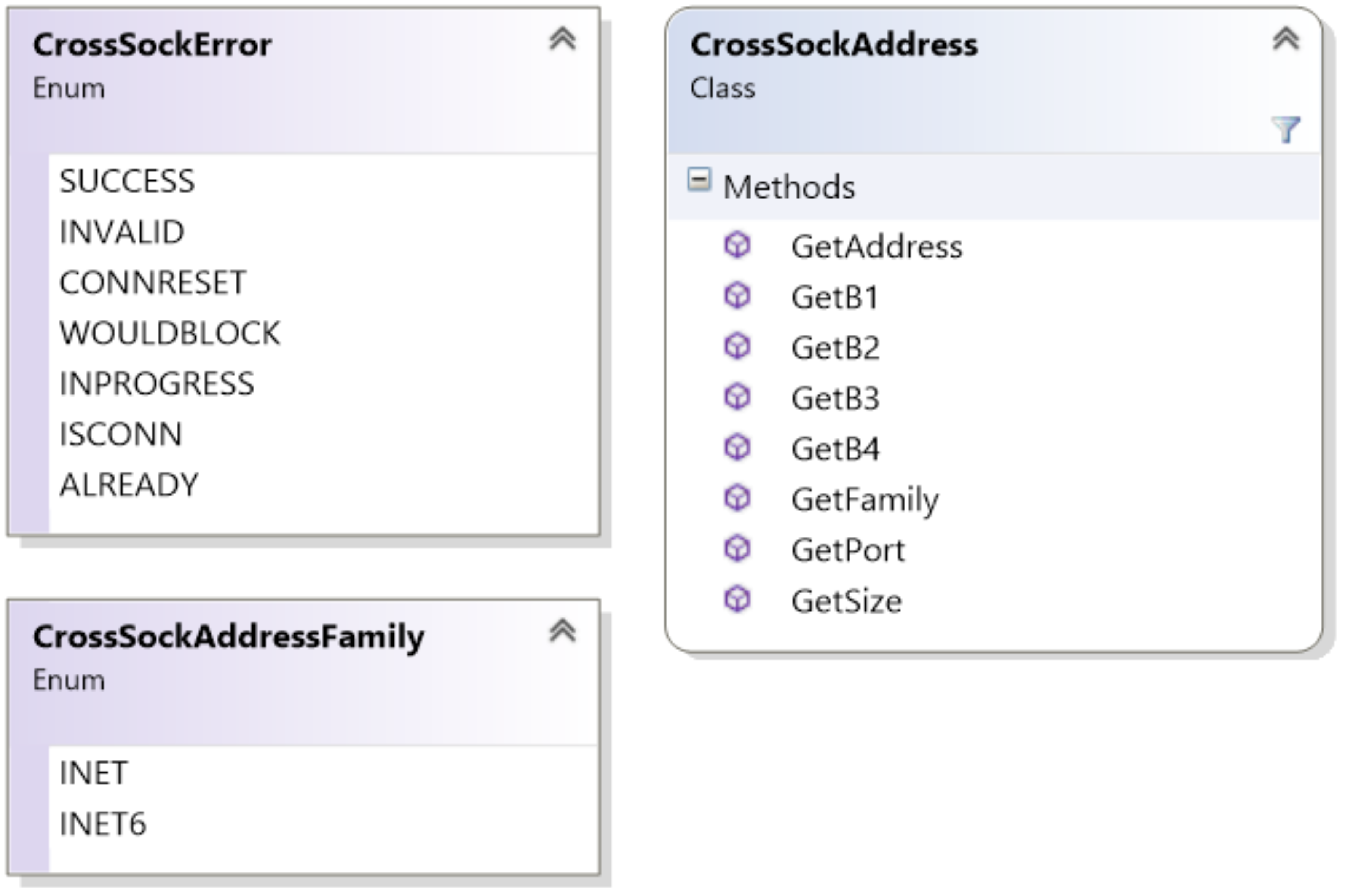
4.1.1. The Socket Interface
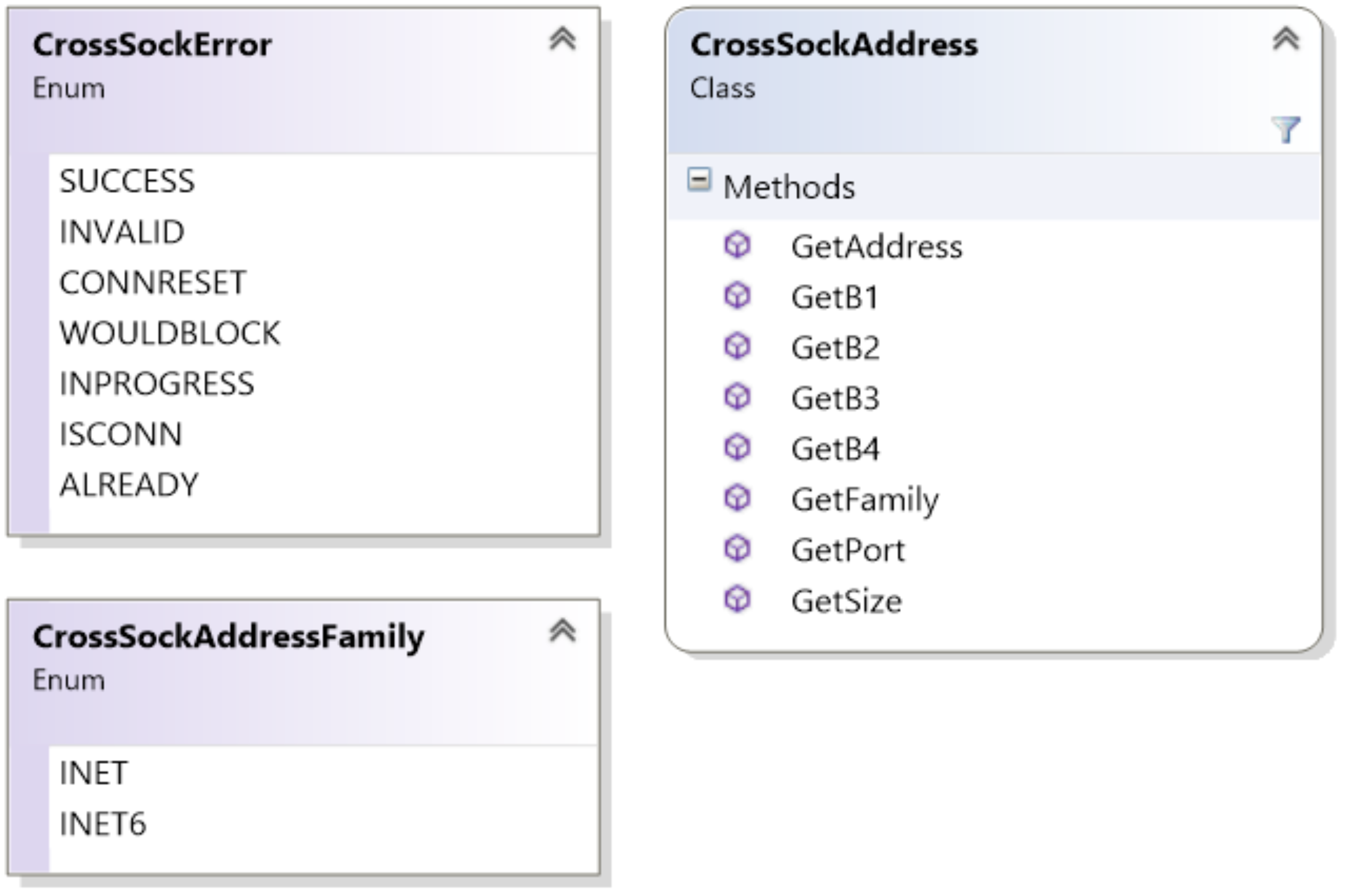
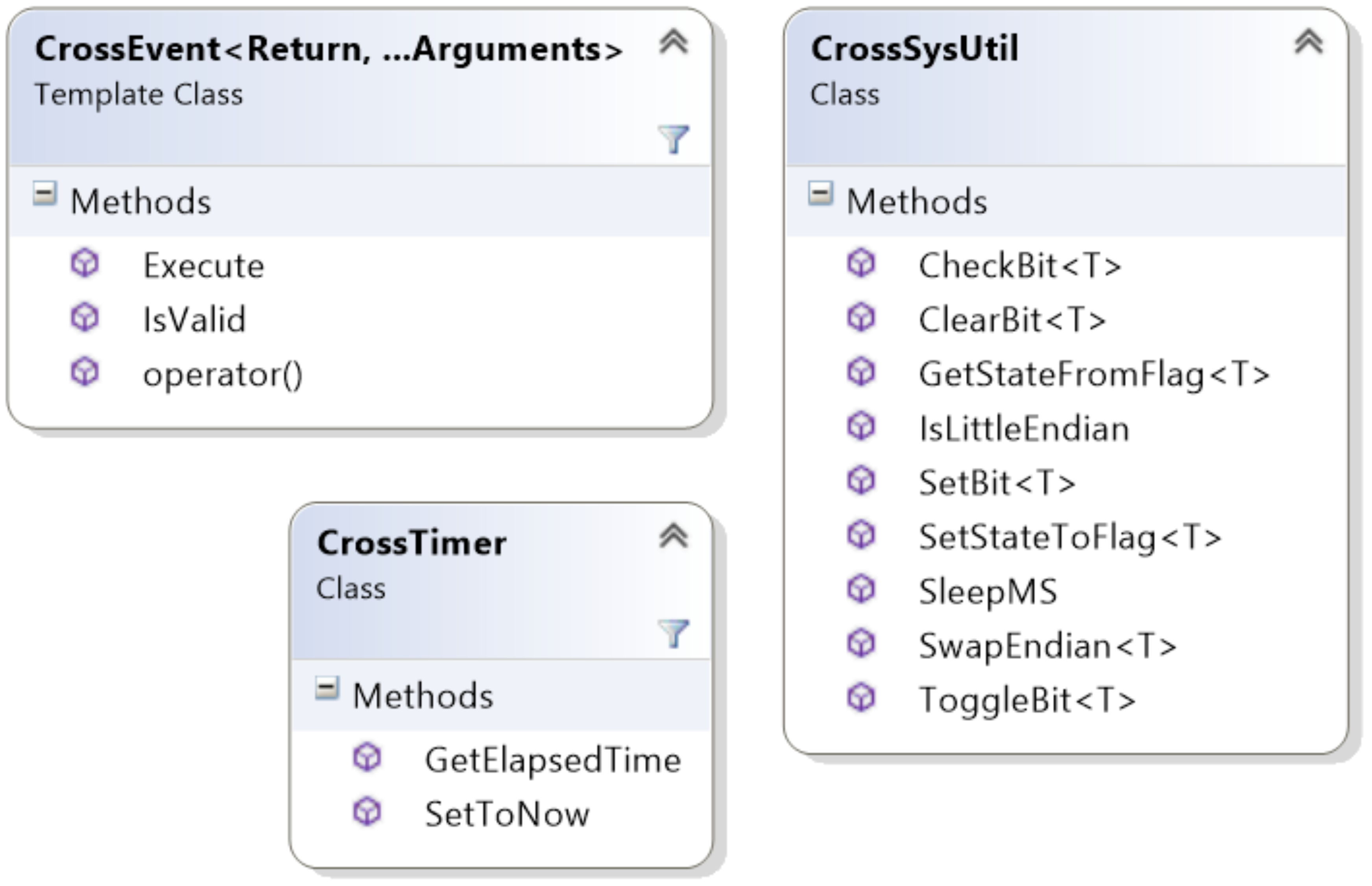
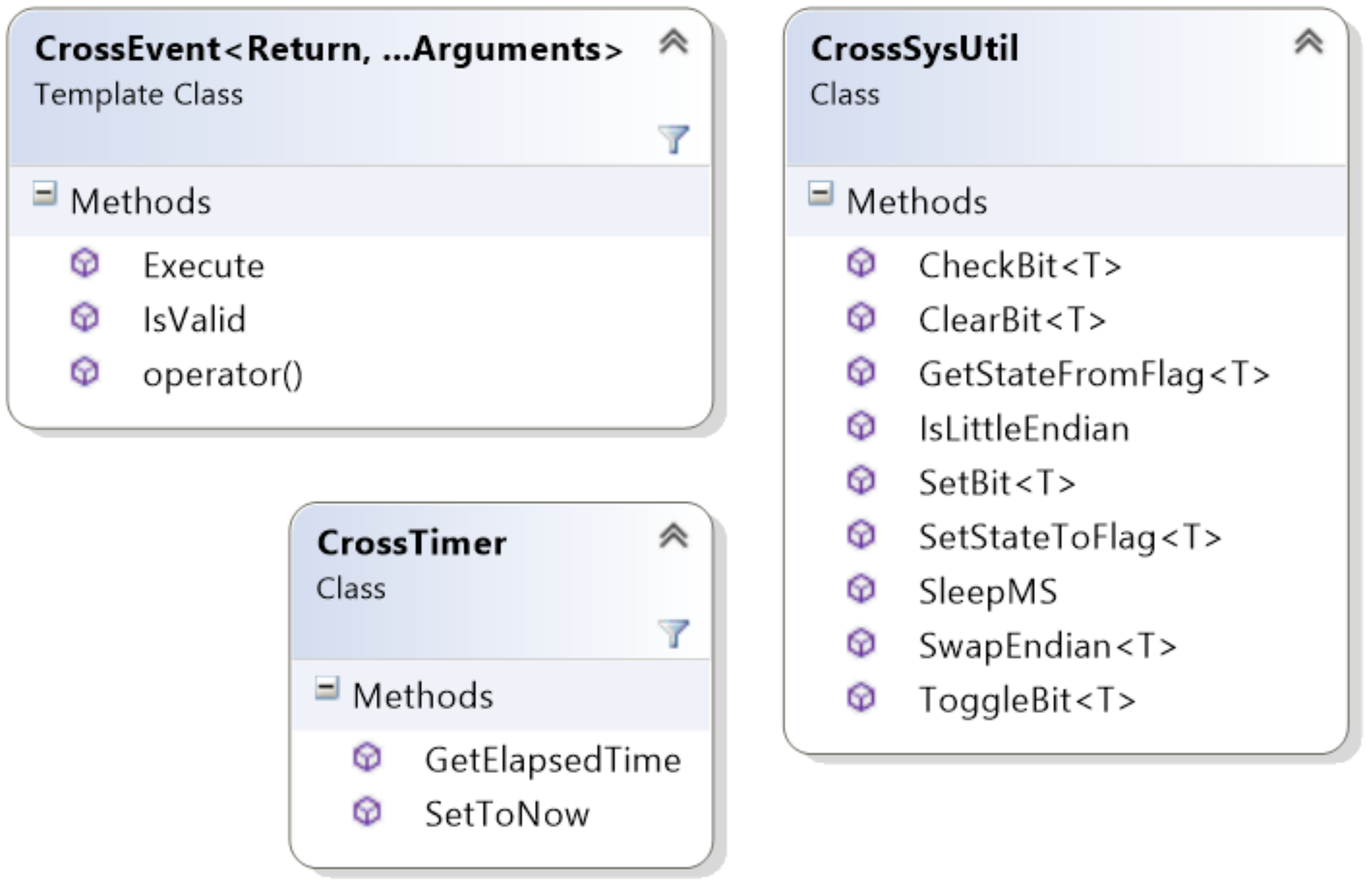
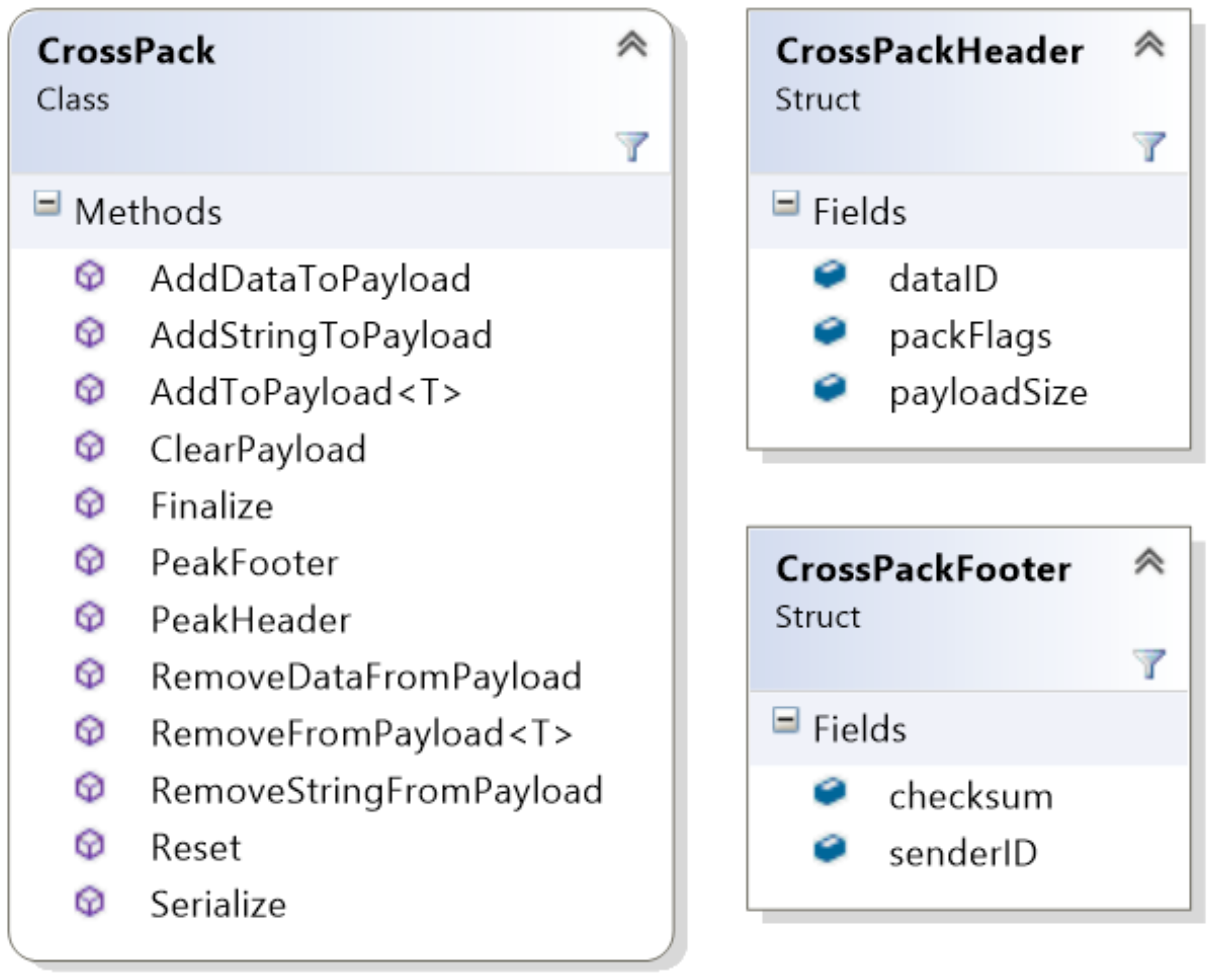
4.1.2. System Utility and Packets
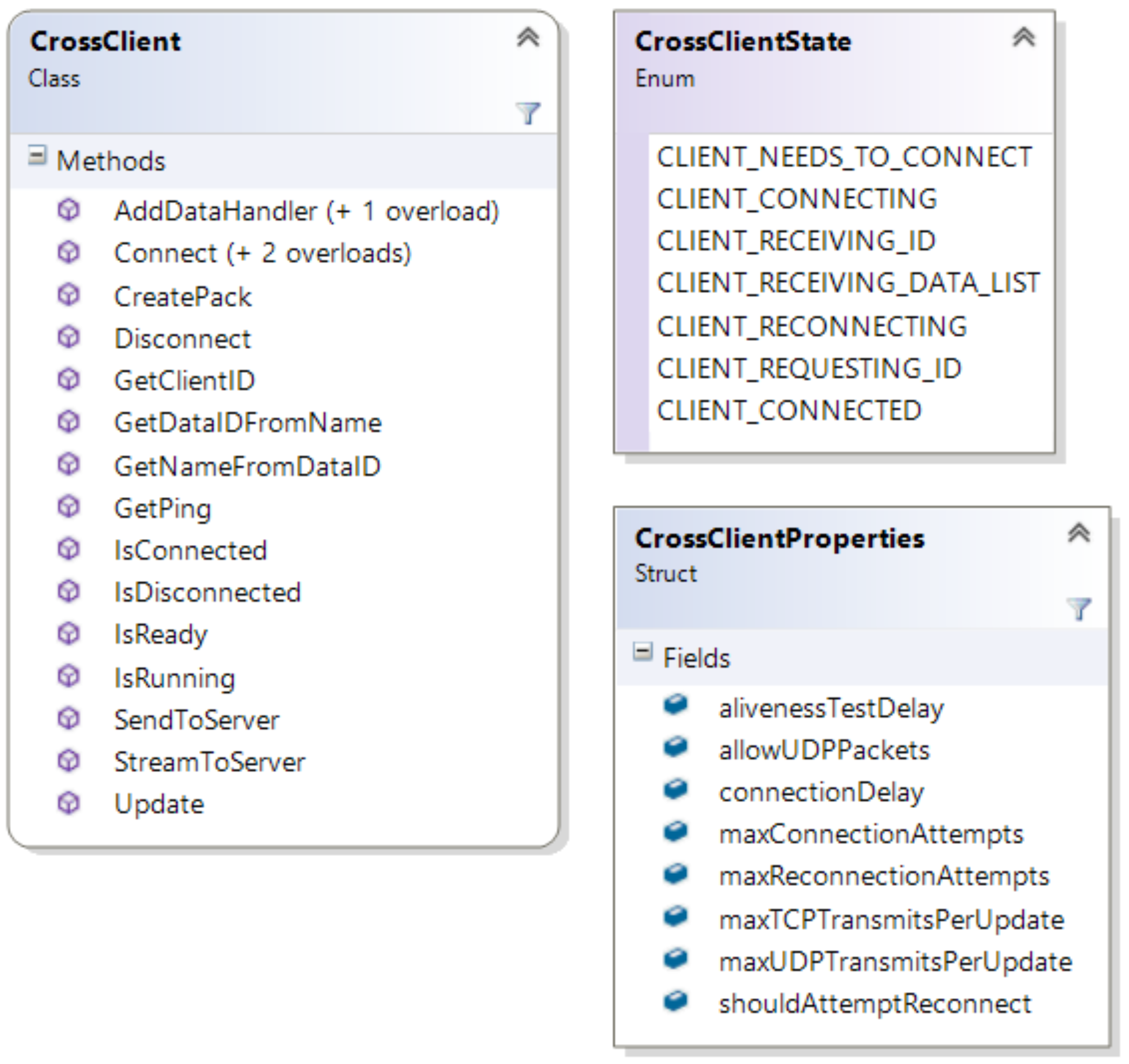
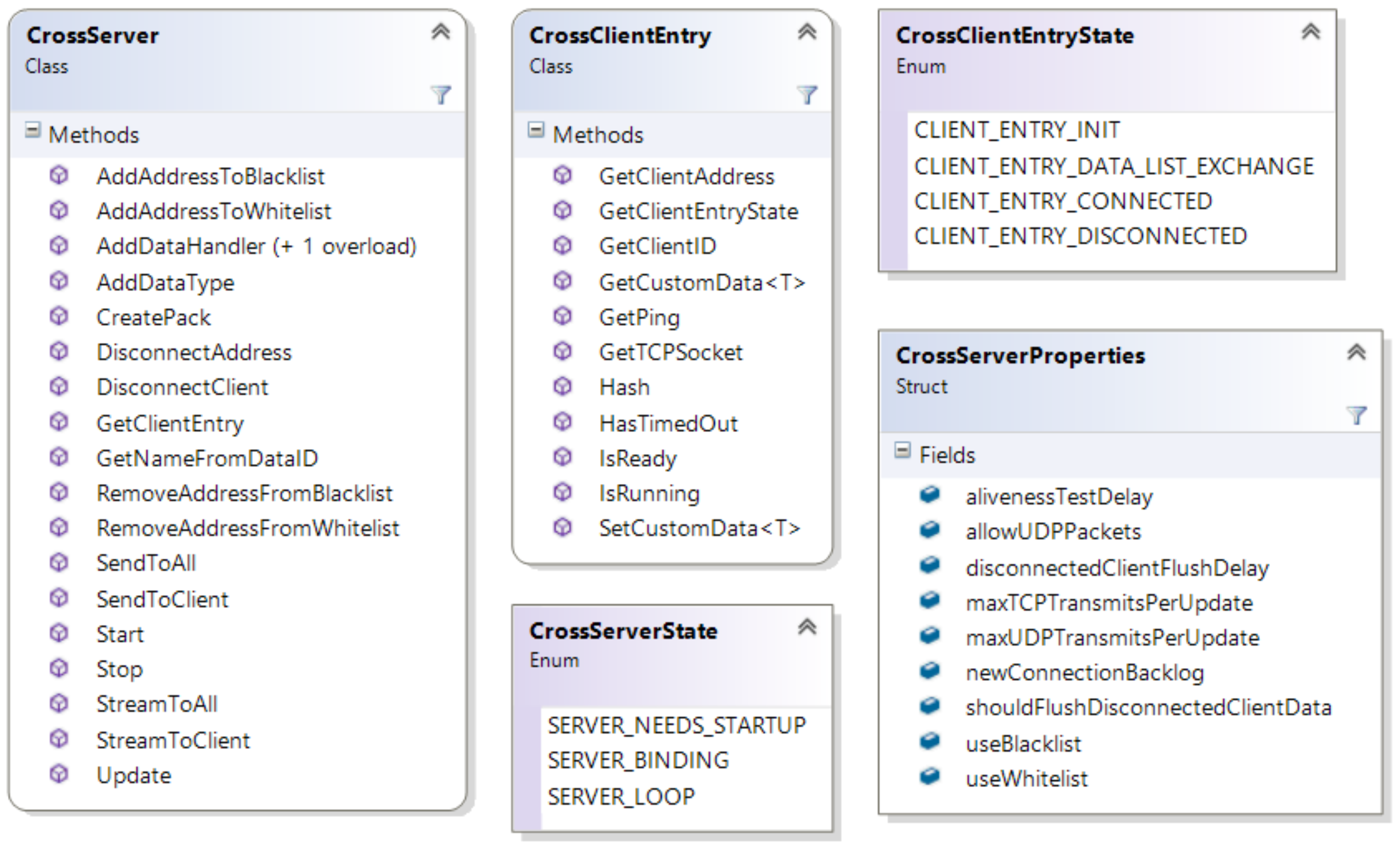
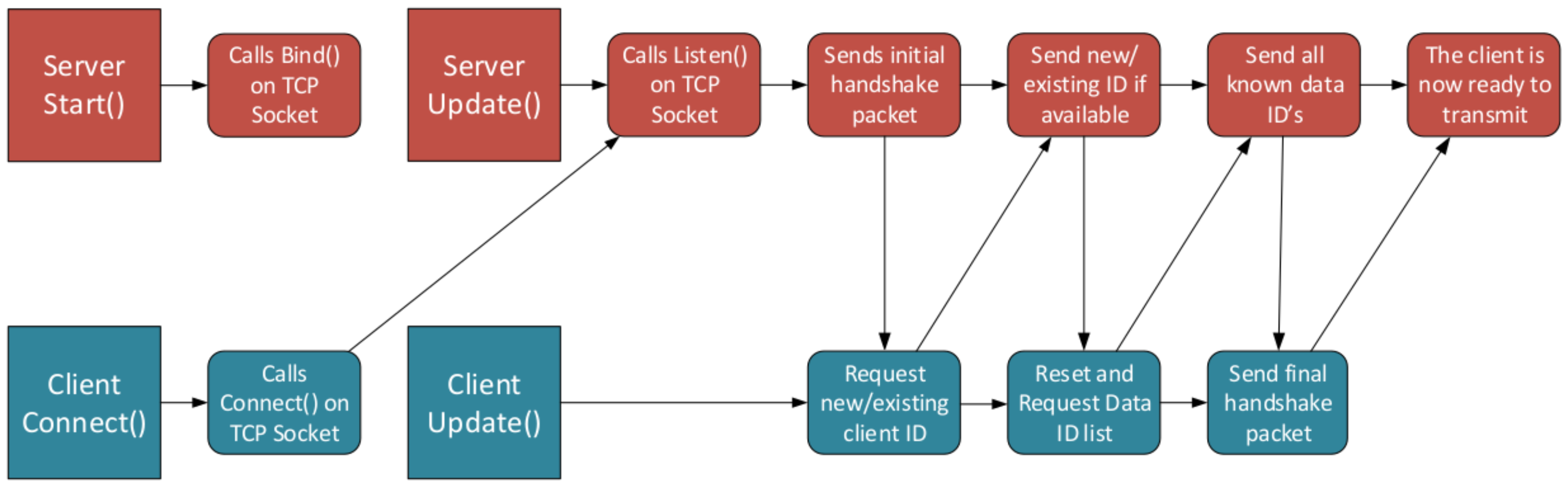
4.1.3. Client–Server Architecture
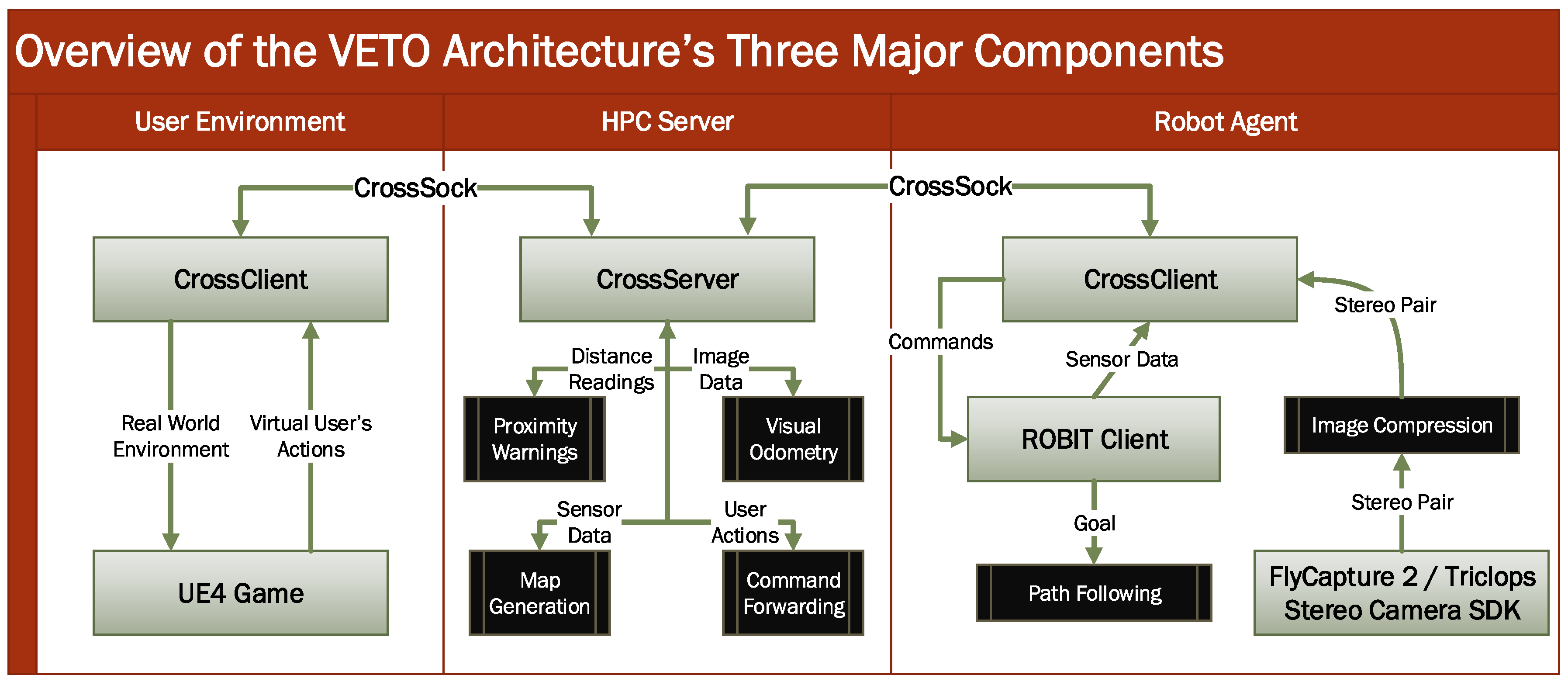
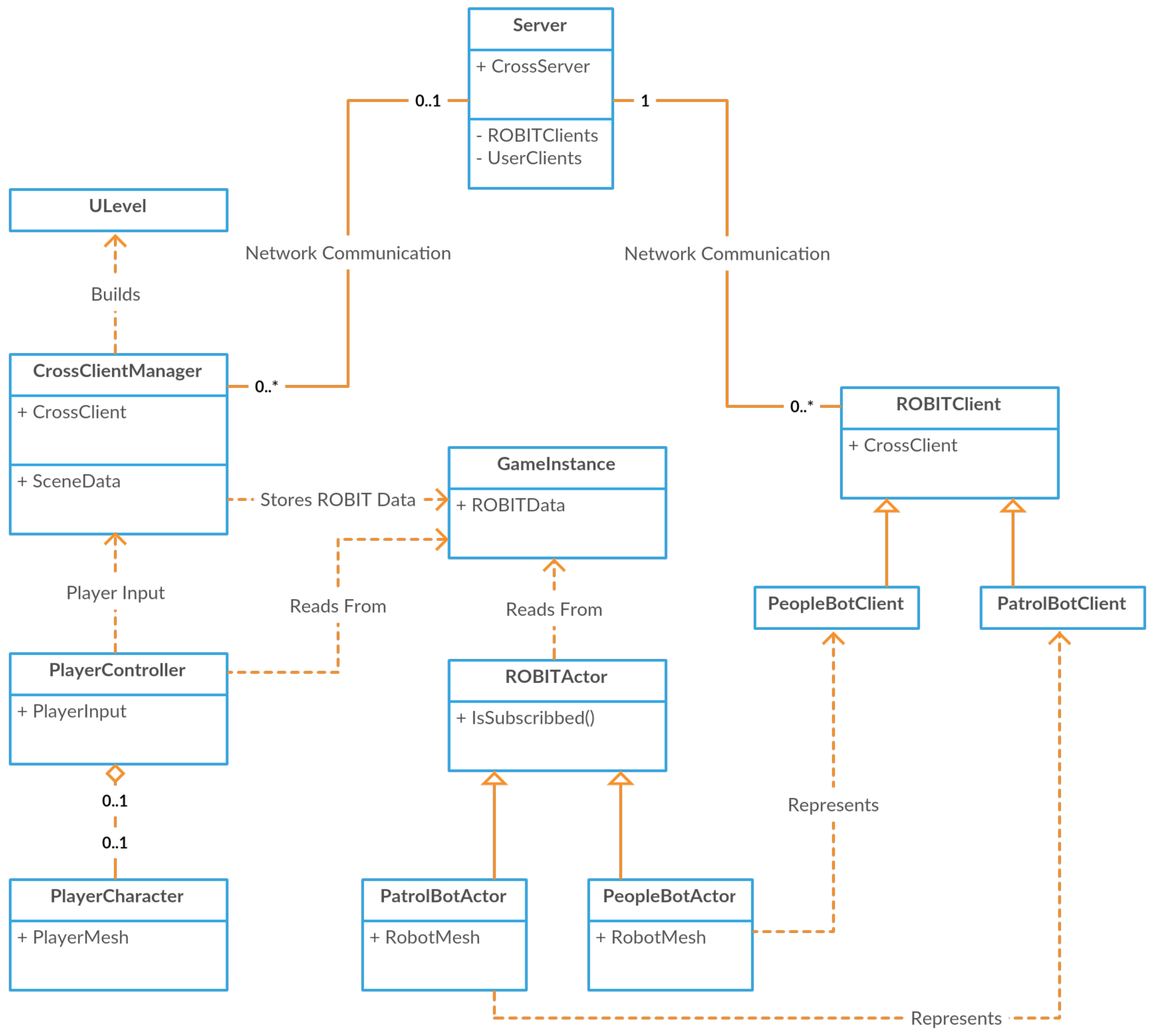
5. The VETO Architecture
5.1. Methodology and Approach
5.1.1. HPC Server
5.1.2. ROBIT Client Framework
- LRF data, Sonar data, and any other distance readings available on the platform.
- Image data, including stereo pairs.
- Any physical bumpers and their current states.
- The transform function from the platform’s internal coordinate system to UE4’s coordinate system, which is the standard for the VETO architecture.
- The estimate of remaining battery life, if relevant.
- Login data, such as the robots friendly name and type ID used by the end-user for visualization.
- The robot’s physical location and orientation, if any localization is employed on the platform.
- The facing of the platform, which can be decoupled from the robot’s actual orientation, such as with pan-tilt cameras.
- Moving the platform, given a 3D direction vector and a normalized speed.
- Panning or tilting any cameras, given the degrees to rotate.
- Playing an audio queue, if relevant.
5.1.3. End-User Game Interface
6. Experimental Results
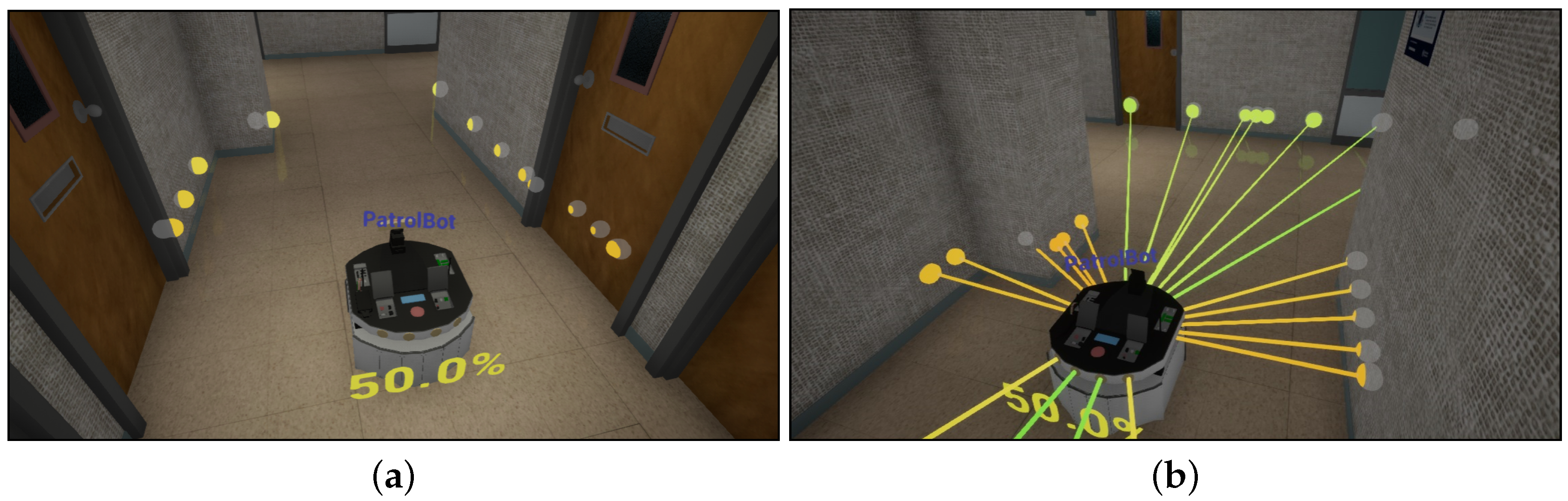
6.1. Qualitative Results
6.2. Human Performance and Usability Study
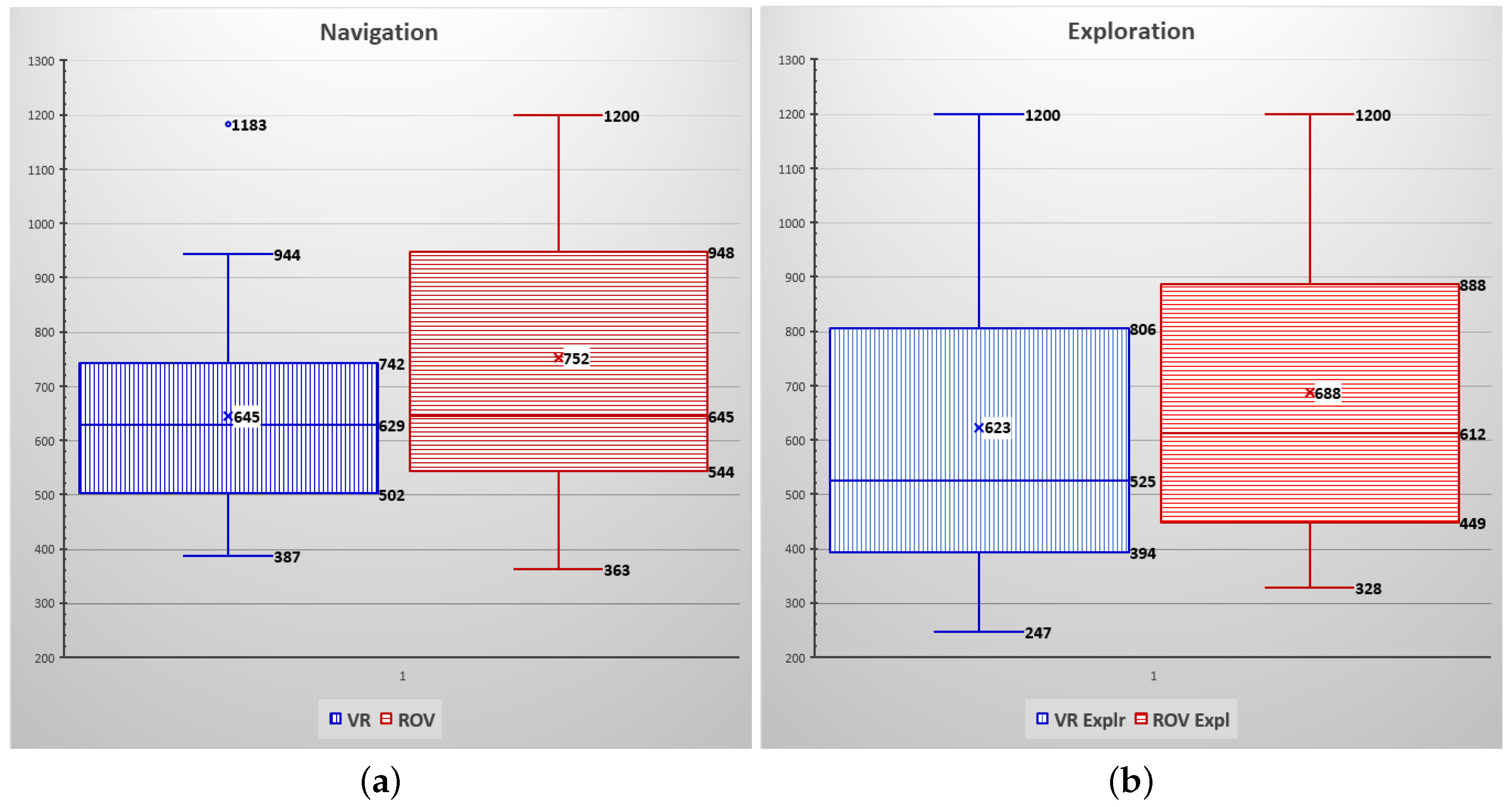
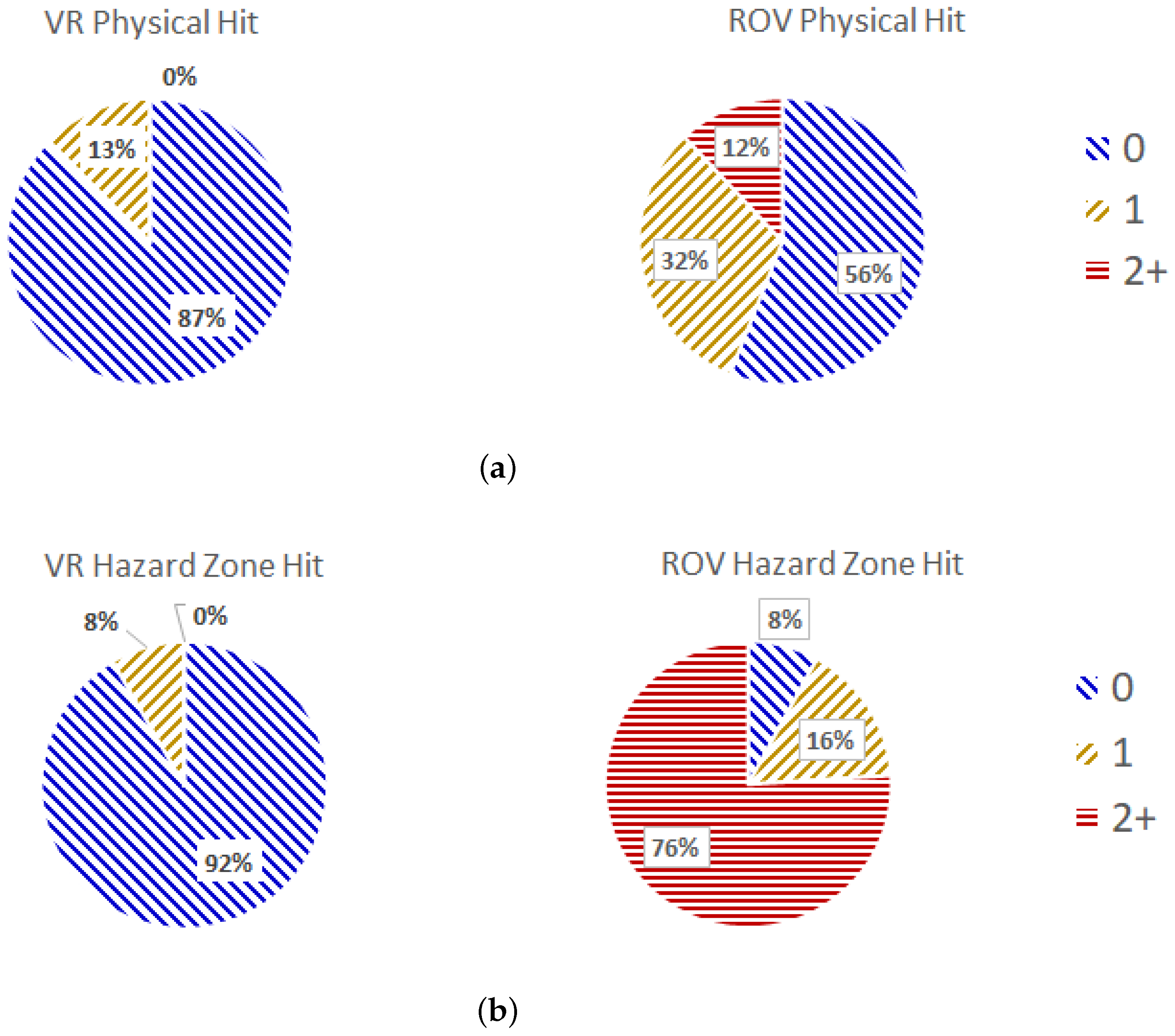
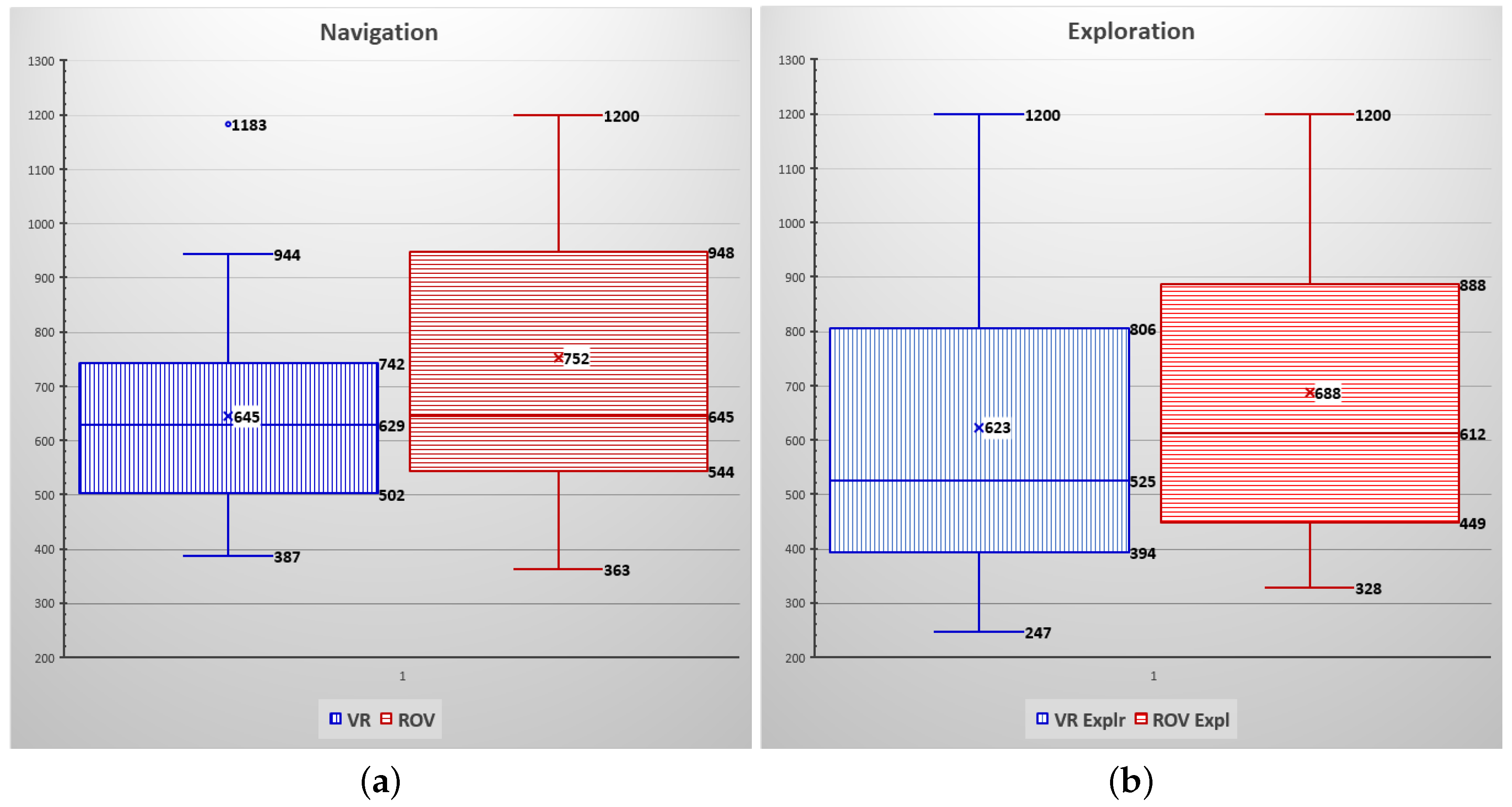
- The Navigation Task: In the first task, called Navigation, the subject was asked to navigate a robot through a maze. There were several physical and non-physical hazard zones populating the maze. The subjects were given 20 min to complete the navigation. The time taken to completely navigate the maze as well as the number of physical and non-physical (hazard zone) hits were recorded for each subject.
- The Exploration Task: In the second task, called Exploration, the subject was asked to explore the office corridors to find three symbols placed randomly within the environment. Again, the subject, was given 20 min to find all three symbols. The time to complete the task as well as the number of symbols found by the subject were recorded.
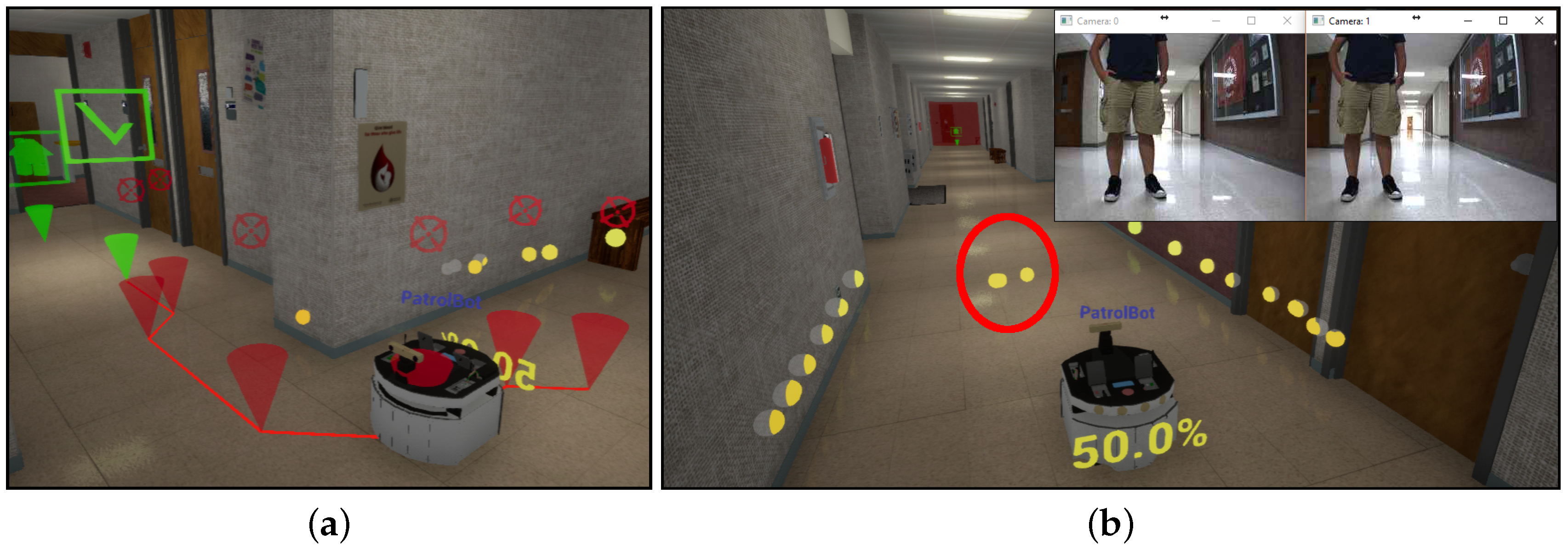
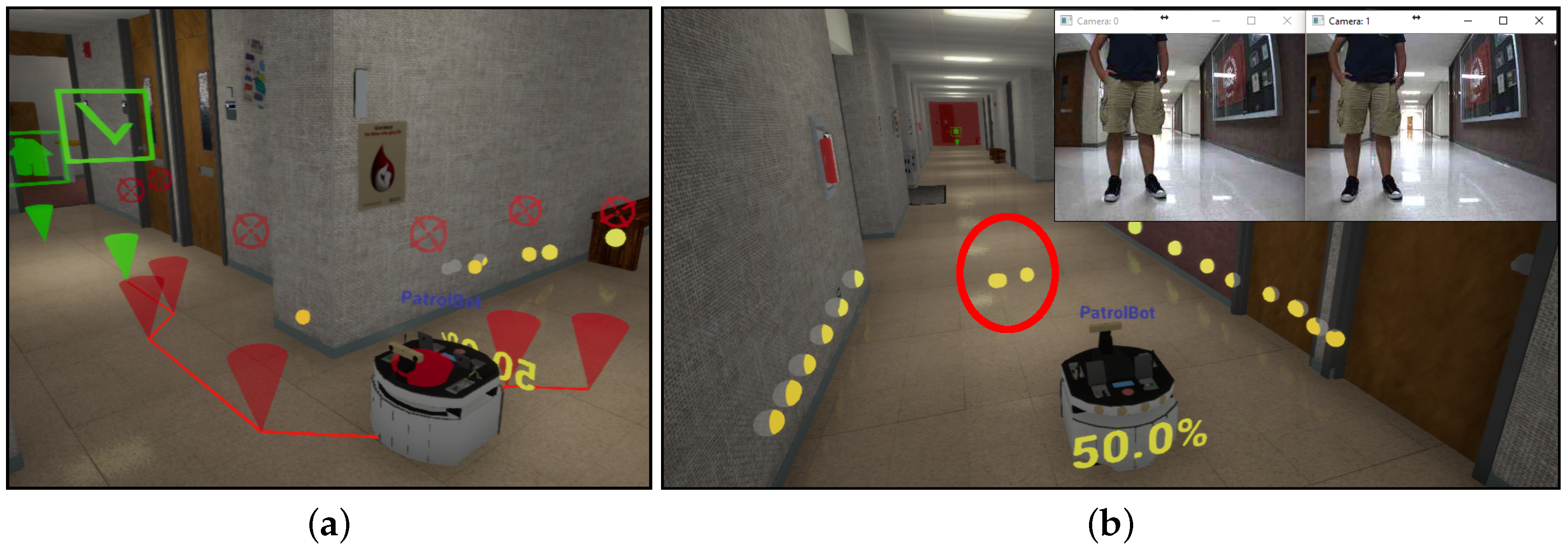
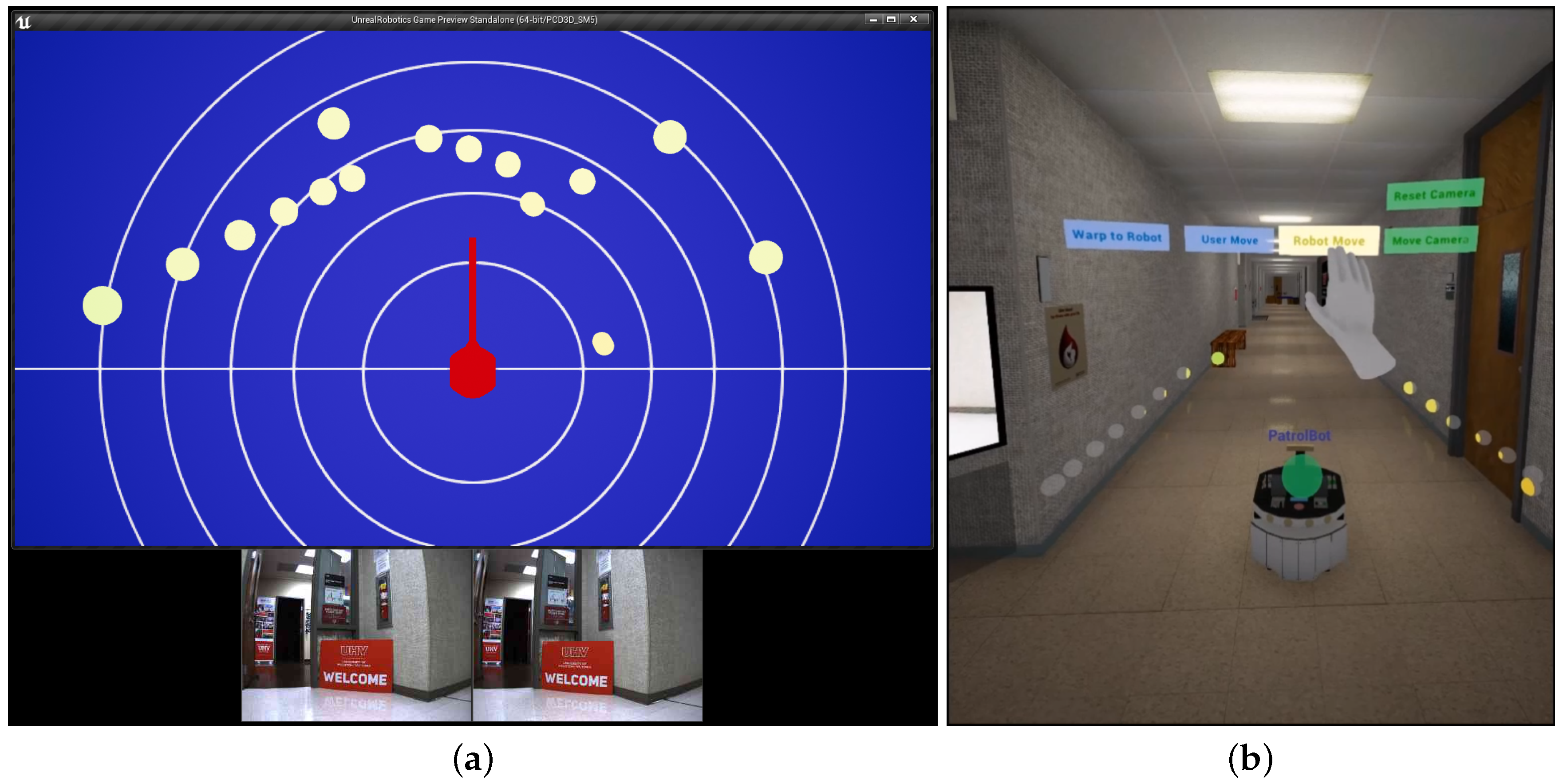
- Regular (ROV) Session: The subject sat at a computer desk and performed the tasks using a keyboard, mouse, and/or joystick, and watched the results via the video feed from the robot camera(s). There was a radar-like Head-Up Display (HUD) to show the location of the robot within the environment. Figure 17a shows the view as seen by one of the test subjects while performing the navigation task.
- Virtual Reality (VR) Session: The subject sat at a computer desk and performed the tasks in the proposed virtual reality environment. The subject communicated the actions to the robot via the proposed virtual reality interfaces and watched the resulting operation on a Head Mounted Display (HMD). The VR view as seen by a subject performing an exploration task is shown in Figure 17b.
6.2.1. Participants
6.2.2. Descriptive Statistics
7. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| HMD | Head Mounted Display |
| VETO | Virtual Environment for TeleOperation |
| VR | Virtual Reality |
| AR | Augmented Reality |
References
- Chen, J.Y.; Haas, E.C.; Barnes, M.J. Human performance issues and user interface design for teleoperated robots. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1231–1245. [Google Scholar] [CrossRef]
- Nickerson, R. Pioneering the personal robotics industry. Technologies for Practical Robot Applications, 2009. In Proceedings of the IEEE International Conference on TePRA 2009, Woburn, MA, USA, 9–10 November 2009; pp. 179–185. [Google Scholar]
- Nielsen, C.W.; Goodrich, M.A.; Ricks, R.W. Ecological interfaces for improving mobile robot teleoperation. IEEE Trans. Robot. 2007, 23, 927–941. [Google Scholar] [CrossRef]
- Oblinger, D. Simulations, Games, and Learning. In ELI White Paper; Eduacause: Louisville, CO, USA, 2006. [Google Scholar]
- Earnshaw, R.A. Virtual Reality Systems; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Burdea, G.C. Invited review: The synergy between virtual reality and robotics. IEEE Trans. Robot. Autom. 1999, 15, 400–410. [Google Scholar] [CrossRef]
- Epic Games. Unreal Engine 4. Available online: https://www.unrealengine.com/what-is-unreal-engine-4 (accessed on 14 April 2014).
- Tavakkoli, A. Game Development and Simulation with Unreal Technology; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Wilson, B. CrossSock. Available online: https://github.com/CAVE-Lab/CrossSock (accessed on 1 March 2017).
- Shiroma, N.; Sato, N.; Chiu, Y.H.; Matsuno, F. Study on effective camera images for mobile robot teleoperation. In Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication ROMAN, 2004, Okayama, Japan, 22 September 2004; pp. 107–112. [Google Scholar]
- Farkhatdinov, I.; Ryu, J.H.; Poduraev, J. A user study of command strategies for mobile robot teleoperation. Intell. Serv. Robot. 2009, 2, 95–104. [Google Scholar] [CrossRef]
- Tsumaki, Y.; Takahashi, M.; Yoon, W.K.; Uchiyama, M. Virtual radar: An obstacle information display system for teleoperation. In Proceedings of the International Conference on Robotics and Automation ICRA’02, Washington, DC, USA, 11–15 May 2002; Volume 2, pp. 1185–1190. [Google Scholar]
- Wang, M.; Liu, J.N. Interactive control for Internet-based mobile robot teleoperation. Robot. Auton. Syst. 2005, 52, 160–179. [Google Scholar] [CrossRef]
- Suzuki, T.; Fujii, T.; Yokota, K.; Asama, H.; Kaetsu, H.; Endo, I. Teleoperation of multiple robots through the internet. In Proceedings of the 5th IEEE International Workshop on Robot and Human Communication, New Orleans, LA, USA, 8–11 September 1996; pp. 84–89. [Google Scholar]
- Dryanovski, I.; Valenti, R.G.; Xiao, J. Fast visual odometry and mapping from RGB-D data. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 2305–2310. [Google Scholar]
- Lentaris, G.; Stamoulias, I.; Soudris, D.; Lourakis, M. HW/SW Codesign and FPGA Acceleration of Visual Odometry Algorithms for Rover Navigation on Mars. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 1563–1577. [Google Scholar] [CrossRef]
- Monferrer, A.; Bonyuet, D. Cooperative robot teleoperation through virtual reality interfaces. In Proceedings of the Information Visualisation, London, UK, 10–12 July 2002; pp. 243–248. [Google Scholar]
- Lin, Q.; Kuo, C. Virtual tele-operation of underwater robots. In Proceedings of the IEEE International Conference on IEEE Robotics and Automation, Albuquerque, NM, USA, 20–25 April 1997; Volume 2, pp. 1022–1027. [Google Scholar]
- Tang, X.; Yamada, H.; Yusof, A.A. Virtual reality-based master-slave control system for construction tele-operation robot. In Proceedings of the 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009. [Google Scholar]
- Baizid, K.; Chellali, R.; Hauptman, T. ViRAT: An advanced multi-robots platform. In Proceedings of the 7th IEEE Conference on IEEE Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 564–569. [Google Scholar]
- Steuer, J. Defining Virtual Reality: Dimensions Determining Telepresence. J. Commun. 1992, 42, 73–93. [Google Scholar] [CrossRef] [Green Version]
- Torjo, J. Boost. Asio C++ Network Programming; Packt Publishing Ltd.: Birmingham, UK, 2013. [Google Scholar]
- Pedersen, M.V.; Heide, J.; Fitzek, F.H. Kodo: An open and research oriented network coding library. In Proceedings of the International Conference on Research in Networking, Valencia, Italiy, 9–13 May 2011; Springer: Berlin, Germany, 2011; pp. 145–152. [Google Scholar]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wilson, B.; Bounds, M.; McFadden, D.; Regenbrecht, J.; Ohenhen, L.; Tavakkoli, A.; Loffredo, D. VETO: An Immersive Virtual Environment for Tele-Operation. Robotics 2018, 7, 26. https://doi.org/10.3390/robotics7020026
Wilson B, Bounds M, McFadden D, Regenbrecht J, Ohenhen L, Tavakkoli A, Loffredo D. VETO: An Immersive Virtual Environment for Tele-Operation. Robotics. 2018; 7(2):26. https://doi.org/10.3390/robotics7020026
Chicago/Turabian StyleWilson, Brandon, Matthew Bounds, David McFadden, Jace Regenbrecht, Loveth Ohenhen, Alireza Tavakkoli, and Donald Loffredo. 2018. "VETO: An Immersive Virtual Environment for Tele-Operation" Robotics 7, no. 2: 26. https://doi.org/10.3390/robotics7020026
APA StyleWilson, B., Bounds, M., McFadden, D., Regenbrecht, J., Ohenhen, L., Tavakkoli, A., & Loffredo, D. (2018). VETO: An Immersive Virtual Environment for Tele-Operation. Robotics, 7(2), 26. https://doi.org/10.3390/robotics7020026