
Dynamics of a Cosmological Model in f(R,T) Gravity: I. On Invariant Planes


School of Mathematical Science, Yangzhou University, Yangzhou 225002, China
*
Author to whom correspondence should be addressed.
Universe 2022, 8(7), 365; https://doi.org/10.3390/universe8070365
Submission received: 20 May 2022
/
Revised: 30 June 2022
/
Accepted: 30 June 2022
/
Published: 3 July 2022
(This article belongs to the Section Cosmology)
Abstract
:Under the background of perfect fluid and flat Friedmann–Lemaître–Robertson–Walker (FLRW) space-time, this paper mainly describes the dynamics of the cosmological model constructed in gravity on three invariant planes, by using the singularity theory and Poincaré compactification in differential equations.
1. Introduction
General Relativity (GR) is one of the pillars of modern physics, known as the standard model of gravitation and cosmology, with many successes [1,2,3]. However, the theory in its usual form fails to explain the late-time acceleration observed experimentally in high redshift supernova [4,5]. Furthermore, GR cannot match with quantum theory and explain the flatness of galaxy rotation curves [6,7]. To this end, scientists have proposed many novel ideas to overcome different aspects of its incompleteness and shortcomings. Some of these ideas modify or generalize GR in a geometrical background. Other ideas introduce new cosmic fluids, such as dark matter, responsible for clustering galaxy structures and dark energy that accelerates the observed accelerating expansion of the Universe. The former has attracted a great deal of interest in recent years. Many researchers have proposed more complicated gravity theories in which high-order curvature invariants correct for the Einstein–Hilbert action concerning the Ricci scalar.
In higher-order gravitational theory, a simple modification is the theory of gravity, obtained by substituting the Ricci scalar R with an arbitrary function in the Einstein–Hilbert action. In some cases, the theory can solve specific problems [8,9,10] and predict a comparison of the early accelerated expansion of the Universe with the late-time accelerated expansion, matching observational cosmology data [11,12,13,14]. Some researchers tested the viability of gravity models to explain dark energy and later-time Universe [15,16,17]. It has been observed that the conclusions of the models in gravity which accounts for the local gravity and cosmic problems are different from those of the CDM model [18]. Two feasible models of gravity in Palatini formalism and the properties of geometric dark energy in modified gravity were recently investigated in [19], and it was concluded that the CDM model was the best fit for the current data. A generalization of the theory has been proposed [20] by introducing an explicit coupling of an arbitrary function of the Ricci scalar R to the matter Lagrangian density in theory. Harko [21] obtained a maximal extension of the Lagrangian by considering the Einstein–Hilbert Lagrangian as a general function of R and . In gravity, it is assumed that the matter Lagrangian contains all the properties of matter, which was generalized to any coupling between matter and geometry [22].
In 2011, Harko et al. proposed a new modified theory of gravity known as gravity [23], which is considered a generalization of gravity as it incorporates the Ricci scalar R and the trace of the energy-momentum tensor T. The primary justification for the dependence on trace T may be induced by the existence of some imperfect exotic fluid or quantum effects originating from a conformal anomaly trace. The dynamical and gravitation equations were developed for test particles, and higher-curvature theories were found to help to resolve the flat problem in galaxies’ rotation curves. In the theory of gravity, cosmic acceleration depends on geometrical contribution to the total cosmic energy density and on matter particles. Since the birth of this theory, its various aspects have been investigated, such as dark energy [24], dark matter [25], redshift drift [26], wormholes [27,28], thermodynamics [29,30], bouncing cosmology [31,32], baryogenesis [33], scalar perturbations [34], gravitational waves [35,36]. The reconstruction schemes of the theory were investigated in [37,38,39]. Shabani and Farhoudi [40,41] studied different types of cosmological models with miscellaneous cosmological quantities by applying a dynamical system approach. Baffou et al. [42] studied the dynamics and stability of the model obtained by imposing the conservation of the energy momentum tensor. The model can be regarded as a potential dark energy candidate. Sharma and Pradhan [43] presented an analysis of cosmological solution in modified theory with . The late-time dynamics of a complete form of the gravity were investigated in [44], and their results are consistent with standard cosmology. Other relevant literature can be referred to [45,46].
Dynamical system analysis is a powerful mathematical tool for studying the dynamical behavior of models of the universe without analytically solving field equations. This method has been used for a broad class of models in different gravity theories [47,48,49,50]. Equilibrium points in the governing equations of cosmological models can describe different epochs of the universe. Considering the perfect fluid and flat FLRW space-time, this study will investigate the dynamics (including the infinite case) and cosmological evolution of the gravitational model on invariant planes by the dynamical system analysis method. To capture all possible equilibrium points near infinity, the Poincaré compactification method is usually applied, which maps all infinity points to points on the boundary of the Poincaré sphere. The involved singularity theory accurately computes trajectories around some unusual equilibrium points. The stability of all equilibrium points is discussed to draw phase diagrams for different invariant planes. Furthermore, we study the case and propose a cosmological solution that is consistent with observations.
The paper is organized as follows: in Section 2, we briefly review the fundamental equations of gravity and derive the dynamical system. Section 3 shows phase diagrams on three invariant planes and obtains cosmological solutions. Section 4 contains the case in 3D. Section 5 briefly analyzes a case that is considered to be more interesting and physical when . In Section 6, we summarize and discuss the obtained results.
2. Cosmological Equation in Gravity
The action for the gravity can be written as follows
where g is the determinant of the metric, is an arbitrary function of the Ricci scalar R, and the trace of the energy-momentum tensor , , and stand the Lagrangians of the dust matter and radiation, respectively, and we set c = 1. Since the trace of the radiation energy–momentum tensor = 0, we drop the superscript m from the trace . As usual, the energy-momentum tensor is defined as
Moreover, we assume that and depend only on the metric and not on its derivatives. We obtain
We assume a perfect fluid in the model and have
By varying the action S with respect to the , we obtain
where , , and denotes the covariant derivative. With the contraction of Equation (5), we have
Here, we consider a spatially flat FLRW metric given by
where represents the scale factor. Equation (5) can be rewritten in a standard form
where
According to the Bianchi identity, we can know that . Under the assumption of the conservation of the effective energy-momentum tensor , we find
where is the Hubble parameter, and a dot denotes the derivative with respect to the cosmic time t. Regarding the metric (7), Equations (5) and (6) can be given as
and
In the following, we assume that , where both and , cannot be a constant. Six dimensionless independent variables are introduced to obtain the equations of dynamics [41], namely,
Four dimensionless parameters are defined for parameterization in the determination of the dynamic equations. These parameters are:
The constraint Equation (10) becomes
and by integrating with respect to the trace h, Equation (18) reads
where C is an integration constant. Set , which leads to . Then, we obtain and , where is a constant.
We consider the model’s later-time behaviors, i.e., radiation does not exist, and assume that , where is a constant. Thus, we obtain that
By setting , the obtained autonomous dynamical system is:
where . We defined the density parameter of matter and effective equation of state as follows
System (21) has six finite equilibrium points . Here, has eigenvalues 2, and , has eigenvalues , , and , has eigenvalues , , and , has eigenvalues , and , has eigenvalues and
and has eigenvalues and
3. Phase Portraits on Invariant Planes and Cosmological Solutions
For the careful analysis of the global phase portraits and the local phase portraits at the equilibrium points of system (21), we start our discussion on three invariant planes , , and , respectively. Note that the first two invariant planes are obvious, here we just need to verify that is also an invariant plane of system (21). As , the surface is invariant if it holds that
where K is a polynomial, and this is the case with .
3.1. Phase Portraits on the Invariant Plane and Cosmological Solutions
On this invariant plane, system (21) becomes
System (25) has four finite equilibrium points , , and . In fact, the points and the previous () represent the same location in space. Since the stability of the same location in 3D space and invariant planes may not be the same, the two forms and are used to distinction. We use when discussing the stability of points in 3D space and on an invariant plane.
The point is a purely kinetic point with and . Since this point can not describe any known matter, it is not considered to have physical significance. The eigenvalues of are 2 and , it is an unstable node when or or , a saddle when and a saddle-node when .
The point is denoted as a -matter-dominated epoch ( MDE) [51] with and . Although the matter-density parameter of does not match the effective equation of state, the universe may approach to this point in this model. The point can be treated as a special case of point by setting . The point has eigenvalues and , it is a saddle when or or , a stable node when and a saddle-node when .
For point , we have and . This point can act as an accelerated-expansion point provided that for or or . This point has eigenvalues and , it is a stable node when or or or , a saddle when or , an unstable node when and a saddle-node when or . Thus, contains the range where the universe can be accelerated, i.e., or or . Additionally, the point does not exist when .
For point , we have and . This point can actually represent a standard matter era with and when . However, when or , can be the point of acceleration, but with a negative value for the matter-density parameter. Considering Equation (22), solutions that lead to are excluded from the background of feasible models, so we discard it from the acceleration point candidates. The point has eigenvalues , it is a saddle when or or or , a stable node when or or , a stable focus when or and a saddle-node when or . The constants , and are the roots of and .
The verification of situation that is a saddle-node when is presented here. When , we set and system (25) becomes
It is quite clear that is the equilibrium point of system (26). By setting , we can obtain
Let and connecting with Equation (27), we obtain
According to the semi-hyperbolic singular point theorem in [52], is a saddle-node. Thus, is also a saddle-node. Similar judgments will not be repeated below.
In order to investigate the infinite situation of system (25), we use the Poincaré compactification [52]. On the local chart , set , , then system (25) can be rewritten as
Note that the time scale here is different from the previous N, but we still use the N notation for convenience.
At infinity system (29) has two equilibrium points , . The equilibrium point has eigenvalues and , it is a stable node when or and a saddle when . The equilibrium point has eigenvalues , , it is a saddle when or or , a stable node when and a saddle-node when .
Similar to the local chart we let , on the local chart , then system (25) has the form
As other equilibrium points at infinity have been analyzed on the , we only have to analyze the origin of system (30) on local chart . Obviously the origin is an equilibrium point of system (30). The equilibrium point has eigenvalues and , it is an unstable node when and a stable node when or . The infinite points , , and are neither matter points nor feasible accelerated points because their matter-density parameters are negative.
Since the above four finite equilibrium points and three infinite equilibrium points have different stabilities when varies, we make a summary in Table 3. Moreover, we present the global phase portraits of system (21) on the in Figure 1, where the point can represent either or .
Here, we focus on the cosmological solutions that have survived a sufficiently long epoch of matter dominance, followed by accelerated expansion. In the phase space, we need to search for saddle points with positive matter-density parameters and stable points that can exhibit accelerated expansion. The points involving matter points are and , and only can be the accelerated point on the invariant plane in the model. Since the matter density parameter of exceeds the critical density of 1, we do not consider it as a matter point. The point is a saddle matter point when and when or or , can be a stable accelerated point. For the limit and 1, it can be found that under the limit , the point is not an accelerated point. When , the point is not an accelerated point, thus the trajectory from to is not a cosmological solution. The point is the saddle matter point and is a stable accelerated point when . Therefore, the trajectory from to can be a cosmological solution. The process from to can be regarded as a cosmological solution when , but there is no trajectory from to in this range. Therefore, the trajectory from to can be a cosmological solution when , however represents the divergence of the eigenvalues as . This means that the system can not remain around the point for a long time. Thus, there are no viable cosmological solutions on the invariant plane .
3.2. Phase Portraits on the Invariant Plane and Cosmological Solutions
On the invariant plane system (21) is
System (31) has three equilibrium points, i.e., , , and . Since the discussion of and has been presented above, we only discuss the point here. The point indicates and . Since radiation is not present in the model, this point does match any known matter and is not physically interesting. The eigenvalues are and , thus is a stable node.
With the use of Poincaré compactification, we set , on the local chart . System (31) reads
As all the points of system (32) at infinity are equilibrium points, using the transformation , we rewrite this system
However, none of the points at is the equilibrium point of system (33).
Similarly, we let and on the local chart . Then, system (31) is
The origin is an equilibrium point of system (34). Although it has eigenvalues 0 and , is not a semi-hyperbolic point as it is not an isolated singular point of system (34). Note that all the points on the axis are the equilibria of system (34) and there are no other equilibria on the axis if we remove the common factor v. In the region near , , for the positive semi-axis (PSA) of v illustrates that u decreases monotonously and for the negative semi-axis (NSA) of v indicates that u increases monotonously. Above the straight line , for the PSA of v and for the NSA of v. Below the straight line , for the PSA of v and for the NSA of v. Therefore, we obtain the local phase portrait of , which is shown in Figure 2. Since the points at infinity have negative values of the matter-density parameter, they can not be an epoch of the universe.
3.3. Phase Portraits on the Invariant Plane and Cosmological Solutions
On this invariant plane system (21) changes to the form
System (35) has four equilibrium points , , / , and . According to the previous discussion, except for the point , the physical meaning of other points is the same, but the mathematical stability may be different, so here we mainly discuss the point . This point means and . It can display an accelerated-expansion era for or . The eigenvalues of are given by , it is a saddle when or or or , it is a stable node when or , a stable focus when and a saddle-node when . The constant is the root of .
Applying the Poincaré compactification on the local chart , we transform system (35) into
At infinity , system (36) has two equilibrium points, which are and . The equilibrium point has eigenvalues and , it is a saddle when or or , an unstable node when and a saddle-node when . The equilibrium point has eigenvalues and , it is an unstable node when and a stable node when or .
On the local chart , we use the Poincaré compactification again changing system (35) to
The equilibrium point is the origin of system (37). This point has eigenvalues 1 and , it is an unstable node when or and a saddle when .
For points , , and we all have . These points can be accelerated points when , however, they are not stable points in this range. Therefore, these three infinite points are not included in the cosmological solutions.
Since the stabilities of these four finite equilibrium points (, , , and ) and three infinite equilibrium points (, , and ) are different when changes, we make a summary in Table 4. Moreover, we present the global phase portraits of system (35) on in Figure 4. On the invariant plane , the matter-density parameters are zero at all the equilibrium points. Since we can not find any matter points, there is no cosmological solution in Figure 4.
3.4. Equilibrium Points on the Poincaré Sphere at Infinity
Using the 3D Poincaré compactification [49,53], we let , , on the local chart and then system (21) becomes
As corresponds to the infinity, we only need to study equilibrium points with on the different local chart of Poincaré sphere. System (38) has equilibrium points and for all when . The equilibrium point has eigenvalues , and , it is a stable node when and it is a saddle when or or . The equilibrium point has eigenvalues , 0, and . Applying the normally hyperbolic sub-manifold theorem [54], the equilibrium point has a two-dimensional stable manifold when or and when , it has a one-dimensional unstable manifold and a one-dimensional stable manifold.
Similar to the local chart , we set , , on . we obtain
System (39) has an equilibrium point when and . The equilibrium point has eigenvalues , , and , it is an unstable node when and it is a saddle when or or . Since other infinite equilibrium points of system (39) are contained in the local chart , we will not analyze them.
Similarly, we have , , and on the local chart and then system (21) is
The origin of system (40) is an equilibrium point. In the local chart , we will not study other equilibria of system (40) expect because they have been discussed on the local charts and . We take and system (40) becomes
Obviously, we can obtain , where is a constant. As is linearly related to , the equilibrium point is an unstable center when and a stable center when or or .
Obviously, we can obtain , where is a constant. As is linearly related to , the equilibrium point is a stable center.
4. The Case in 3D
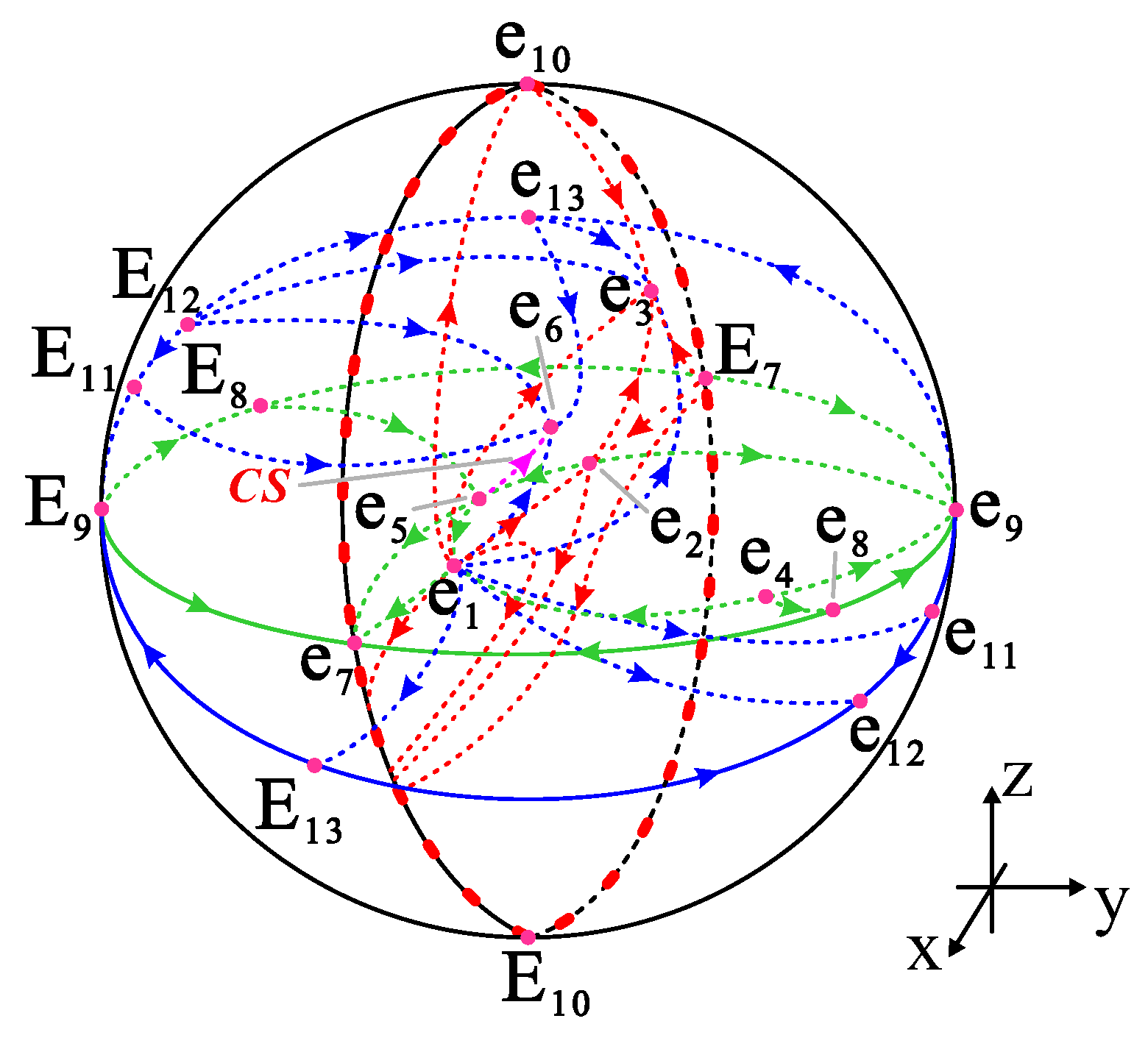
According to Ref. [41], the best solution of this model can be achieved for tending to one. Therefore, we present global phase of system (21) on three invariant planes when in Figure 5 and Figure 6, where represents the cosmological solution.
When , there is only one saddle matter point and one stable accelerated point . The trajectory from to on the invariant plane can be considered as a cosmological solution. However, this case approximates GR because leads to . Note that GR can not explain the late-time behavior of the universe. This cosmological solution is unacceptable.
When , is not an accelerated point, and is the only stable accelerated point instead. There is only one saddle matter point . We can not find a cosmological solution on three invariant planes because the accelerated point and the matter saddle point are not on the same plane. However, by analyzing the trajectories around these three points in 3D, we find that the saddle matter point can reach the stable accelerated point , which is an acceptable cosmological solution. This solution from to corresponds to the solution from to obtained in Ref. [41].
5. The Form
In this section, we briefly discuss a case that is considered to be more interesting and physical when . Considering a spatially flat FLRW metric and the model’s later-time behaviors. This theory gives
and
as the Friedmann-like equation and Raychaudhuri-like equation, respectively. The dynamical system becomes
The density parameter of matter and effective equation of state read as follows
The equilibrium points of system (44) and the related eigenvalues are listed in Table 5 and Table 6, respectively. Furthermore, the parameter satisfies
Using Equations (13)–(15), Equation (47) can be rewritten as
where . Let
which is well-defined for as all solutions that hold must satisfy . Therefore, an acceptable solution must satisfy or or . By assuming in Equation (49), we obtain , which gives . The condition is true only when , resulting in . On the other hand, the point is the matter point when . Note that models with can be acceptable, we mainly discuss the case of where .
When , as , we can obtain , which means . Within this range, the eigenvalues of point can be approximated as
This point is a matter saddle point with and . The point is a stable accelerated point for . Therefore, the transition from to is viable for leaving the matter-dominated era with and entering the accelerated epoch . Moreover, the transition from to is possible. For , the de Sitter point is an acceptable final attractor for the cosmological solutions. When , the trajectories can reach the final attractor after leaving the matter point .
When , we obtain the limit . The point is not acceptable in this range because there are two eigenvalues approaching infinity. This indicates the matter-dominated era is short and does not match with the observational data. Since there are no other matter points, we cannot find the cosmological solution withinn this limit.
6. Conclusions
The dynamics of the gravity model on the invariant planes for a perfect fluid in a spatially flat FLRW metric are studied with the form . By considering the conservation of the energy–momentum tensor, it has been presented that the functionality of must have the form in the minimal models. More precisely, we mainly analyze the model in the type of . We apply two powerful dynamic analysis tools, singularity theory, and Poincaré compactification. Using the singularity theory, we can understand the direction of trajectories near some unusual equilibrium points, such as saddle-nodes. The infinite phase space can be transformed into a finite space with the application of Poincaré compactification. Through the use of these two techniques, the stability of all the equilibrium points and global phase on the invariant planes is presented. Finally, we discussed the case of . All cosmological solutions have been marked in the figures.
Since the parameter in this paper has a wider range of values, in order to accurately show the evolution of the model on three invariant planes simultaneously in space, we finally selected the limit , which visually illustrates the dynamic behavior of the model at this limit. The trajectory from to on the invariant plane is not the desired cosmological solution when , and since this case approaches GR and we adopt it. When , we have a stable accelerated point , and two saddle matter points and . Although there are no cosmological solutions on the three invariant planes, by analyzing the trajectories around these three points, we find the trajectories from to exist, which can be considered as a cosmological solution. Furthermore, this solution is consistent with the cosmological solution from to in Ref. [41]. In addition, we briefly discuss a more interesting and physical form , and find two viable cosmological solutions to and to when .
Author Contributions
Conceptualization, F.G.; Formal analysis, J.L., R.W.; software, J.L.; writing—original draft, J.L.; writing—review and editing, F.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (NSFC) through grant Nos. 12172322 and 11672259, the Postgraduate Research & Practice Innovation Program of Jiangsu Province (KYCX21_3190).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
We are very grateful to the anonymous reviewers whose comments and suggestions helped improve and clarify this paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Will, C.M.; Anderson, J.L. Theory and experiment in gravitational physics. Am. J. Phys. 1994, 62, 1153. [Google Scholar] [CrossRef]
- Turyshev, S.G. Experimental tests of general relativity: Recent progress and future directions. Physics-Uspekhi 2009, 52, 1. [Google Scholar] [CrossRef] [Green Version]
- Iorio, L.; Lichteneggrr, H.I.M.; Ruggiero, M.L.; Corda, C. Phenomenology of the Lense-Thirring effect in the solar system. Astrophys. Space. Sci. 2011, 331, 351–395. [Google Scholar] [CrossRef] [Green Version]
- Peeebles, P.J.E. Testing general relativity on the scales of cosmology. arXiv 2004, arXiv:astro-ph/0410284. [Google Scholar]
- Bennett, C.L.; Bay, M.; Halpern, M.; Hinshaw, G.; Jackson, C.; Jarosik, N.; Kogut, A.; Limon, M.; Meyer, S.S.; Page, L.; et al. The microwave anisotropy probe* mission. Astrophys. J. 2003, 583, 1. [Google Scholar] [CrossRef] [Green Version]
- Farajollahi, H.; Farhoudi, M.; Shojaie, H. On dynamics of Brans–Dicke theory of gravitation. Int. J. Theor. Phys. 2010, 49, 2558–2568. [Google Scholar] [CrossRef] [Green Version]
- Bahrehbakhsh, A.F.; Farhoudi, M.; Shojaie, H. FRW cosmology from five dimensional vacuum Brans–Dicke theory. Gen. Relativ. Gravit. 2011, 43, 847–869. [Google Scholar] [CrossRef] [Green Version]
- De Felice, A.; Tsujikawa, S. f(R) Theories. Living. Rev. Relativ. 2010, 13, 3. [Google Scholar] [CrossRef] [Green Version]
- Capozziello, S.; De Laurentis, M. Extended theories of gravity. Phys. Rep. 2011, 509, 167–321. [Google Scholar] [CrossRef] [Green Version]
- Nojiri, S.; Odintsov, S.D.; Mittal, A. Unified cosmic history in modified gravity: From f(R) theory to Lorentz non-invariant models. Phys. Rep. 2011, 505, 59–144. [Google Scholar] [CrossRef] [Green Version]
- Starobinsky, A.A. Disappearing cosmological constant in f(R) gravity. JETP. Lett. 2007, 86, 157–163. [Google Scholar] [CrossRef] [Green Version]
- Tsujikawa, S. Observational signatures of f(R) dark energy models that satisfy cosmological and local gravity constraints. Phys. Rev. D Part. Fields. 2007, 77, 315–317. [Google Scholar] [CrossRef] [Green Version]
- Nojiri, S.; Odintsov, S.D.; Sáez-Gómez, D. Cosmological reconstruction of realistic modified f(R) gravities. Phys. Lett. B 2009, 681, 74–80. [Google Scholar] [CrossRef] [Green Version]
- Nojiri, S.; Odintsov, S.D.; Oikonomou, V.K. Unifying inflation with early and late-time dark energy in f(R) gravity. Phys. Dark Universe 2020, 29, 100602. [Google Scholar] [CrossRef]
- Hu, W.; Sawicki, I. Models of f(R) cosmic acceleration that evade solar-system tests. Astrophys. Space Sci. 2007, 76, 064004. [Google Scholar] [CrossRef] [Green Version]
- Bergliaffa, S.E.P. Constraining f(R) theories with the energy conditions. New Astron. 2006, 642, 311–314. [Google Scholar]
- Santos, J.; Alcaniz, J.S.; Reboucas, M.J.; Carvalho, F.C. Energy conditions in f(R) gravity. Phys. Rev. D 2007, 76, 083513. [Google Scholar] [CrossRef] [Green Version]
- Amendola, L.; Tsujikawa, S. Phantom crossing, equation-of-state singularities, and local gravity constraints in f(R) models. Phys. Lett. B 2008, 660, 125–132. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.; He, Y.; Qi, J.Z.; Li, J.; Cao, S.; Liu, T.H.; Wang, J. Testing f(R) gravity with the simulated data of gravitational waves from the Einstein Telescope. Astrophys. J. 2021, 911, 135. [Google Scholar] [CrossRef]
- Bertolami, O.; Boehmer, C.G.; Harko, T.; Lobo, F.S.N. Extra force in f(R) modified theories of gravity. Phys. Rev. D 2007, 75, 104016. [Google Scholar] [CrossRef] [Green Version]
- Harko, T. Modified gravity with arbitrary coupling between matter and geometry. Phys. Lett. B 2008, 669, 376–379. [Google Scholar] [CrossRef] [Green Version]
- Harko, T.; Lobo, F.S.N. f(R,Lm) gravity. Eur. Phys. J. C 2010, 70, 373–379. [Google Scholar] [CrossRef]
- Harko, T.; Lobo, F.S.N.; Nojiri, S.; Odintsov, S.D. f(R,T) gravity. Appl. Math. Nonlinear Sci. 2011, 84, 024020. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.; Huang, Y.C. The cosmology in f(R,τ) gravity without dark energy. Int. J. Mod. Phys. D 2016, 25, 1650038. [Google Scholar] [CrossRef] [Green Version]
- Zaregonbadi, R.; Farhoudi, M.; Riazi, N. Dark matter from f(R,T) gravity. Phys. Rev. D 2016, 94, 084052. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharjee, S.; Sahoo, P.K. Redshift drift in f(R,T) gravity. New Astron. 2020, 81, 101425. [Google Scholar] [CrossRef]
- Moraes, P.H.R.S.; Sahoo, P.K. Nonexotic matter wormholes in a trace of the energy-momentum tensor squared gravity. Phys. Rev. D 2018, 57, 024007. [Google Scholar] [CrossRef] [Green Version]
- Bhatti, M.Z.; Yousaf, Z.; Ilyas, M. Existence of wormhole solutions and energy conditions in f(R,T) gravity. J. Astrophys. 2018, 39, 1–11. [Google Scholar] [CrossRef]
- Sharif, M.; Zubair, M. Thermodynamics in f(R,T) theory of gravity. J. Cosmol. Astropart. Phys. 2012, 2012, 028. [Google Scholar] [CrossRef] [Green Version]
- Houndjo, M.J.S.; Alvarenga, F.G.; Rodrigues, M.E.; Jardim, D.F.; Myrzakulov, R. Thermodynamics in Little Rip cosmology in the framework of a type of f(R,T) gravity. Eur. Phys. J. Plus 2014, 129, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharjee, S.; Sahoo, P.K. Comprehensive analysis of a non-singular bounce in f(R,T) gravitation. Phys. Dark Universe 2020, 28, 100537. [Google Scholar] [CrossRef] [Green Version]
- Sahoo, P.; Bhattacharjee, S.; Tripathy, S.K.; Sahoo, P.K. Bouncing scenario in f(R,T) gravity. Mod. Phys. Lett. A 2020, 35, 2050095. [Google Scholar] [CrossRef]
- Sahoo, P.K.; Bhattacharjee, S. Gravitational baryogenesis in non-minimal coupled f(R,T) gravity. Int. J. Theor. Phys. 2020, 59, 1451–1459. [Google Scholar] [CrossRef] [Green Version]
- Alvarenga, F.G.; De La Cruz-Dombriz, A.; Houndjo, M.J.S.; Rodrigues, M.E.; Sáez-Gómez, D. Dynamics of scalar perturbations in f(R,T) gravity. Phys. Rev. D 2013, 87, 103526. [Google Scholar] [CrossRef] [Green Version]
- Alves, M.E.S.; Moraes, P.H.R.S.; De Araujo, J.C.N.; Malheiro, M. Gravitational waves in f(R,T) and f(R,Tϕ) theories of gravity. Phys. Rev. D 2016, 94, 024032. [Google Scholar] [CrossRef] [Green Version]
- Sharif, M.; Siddiqa, A. Propagation of polar gravitational waves in f(R,T) scenario. Gen. Relativ. Gravit. 2019, 51, 74. [Google Scholar] [CrossRef] [Green Version]
- Houndjo, M.J.S. Reconstruction of f(R,T) gravity describing matter dominated and accelerated phases. Int. J. Mod. Phys. D 2012, 21, 1250003. [Google Scholar] [CrossRef] [Green Version]
- Sharif, M.; Zubair, M. Cosmological reconstruction and stability in f(R,T) gravity. Gen. Relativ. Gravit. 2014, 46, 1723. [Google Scholar] [CrossRef]
- Singh, C.P.; Singh, V. Reconstruction of modified f(R,T) gravity with perfect fluid cosmological models. Gen. Relativ. Gravit. 2014, 46, 1696. [Google Scholar] [CrossRef]
- Shabani, H.; Farhoudi, M. Cosmological and solar system consequences of f(R,T) gravity models. Phys. Rev. D 2014, 90, 044031. [Google Scholar] [CrossRef] [Green Version]
- Shabani, H.; Farhoudi, M. f(R,T) cosmological models in phase space. Phys. Rev. D 2013, 88, 044048. [Google Scholar] [CrossRef] [Green Version]
- Baffou, E.H.; Kpadonou, A.V.; Rodrigues, M.E.; Houndjo, M.J.S.; Tossa, J. Cosmological viable f(R,T) dark energy model: Dynamics and stability. Astrophys. Space. Sci. 2015, 356, 173–180. [Google Scholar] [CrossRef] [Green Version]
- Sharma, U.K.; Pradhan, A. Propagation of polar gravitational waves in f(R,T) scenario. Int. J. Geom. Methods Mod. Phys. 2018, 15, 1850014. [Google Scholar] [CrossRef]
- Abchouyeh, M.A.; Mirza, B.; Shahidi, P.; Oboudiat, F. Late time dynamics of f(R,T,RμνTμν) gravity. Int. J. Geom. Methods Mod. Phys. 2020, 17, 2050008. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, T.B.; Rosa, J.L.; Lobo, F.S.N. Cosmology in the novel scalar-tensor representation of f(R,T) gravity. arXiv 2021, arXiv:2112.03652. [Google Scholar]
- Santos, A.F. Gödel solution in f(R,T) gravity. Mod. Phys. Lett. A 2013, 28, 1350141. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.Q.; Frolov, A.V. Cosmological dynamics in f(R) dravity. Phys. Rev. D 2013, 88, 124036. [Google Scholar] [CrossRef] [Green Version]
- Zonunmawia, H.; Khyllep, W.; Dutta, J.; Järv, L. Cosmological dynamics of brane gravity: A grobal dynamical system perspective. Phys. Rev. D 2018, 98, 083532. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.B.; Llibre, J. Global dynamics of the Hořava-Lifshitz cosmological model in a non-flat universe with non-zero cosmological constant. Universe 2021, 7, 445. [Google Scholar] [CrossRef]
- Singh, A.; Singh, G.P.; Pradhan, A. Cosmic dynamics and qualitative study of Rastall model with spatial curvature. arXiv 2022, arXiv:2205.13934. [Google Scholar] [CrossRef]
- Amendola, L. Coupled quintessence. Phys. Rev. D 2000, 62, 043511. [Google Scholar] [CrossRef] [Green Version]
- Dumortier, F.; Llibre, J.; Ateés, J.C. Qualitative Theory of Planar Differential Syetems; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Cima, A.; Llibre, J. Bounded polynomial vector fields. Trans. Am. Math. Soc. 1990, 318, 557–579. [Google Scholar] [CrossRef]
- Álvarez, M.J.; Pugh, C.C.; Shub, M. Invariant Manifolds; Springer: Berlin/Heidelberg, Germany, 1977. [Google Scholar]
Figure 1.
(a–p) Phase portraits on .

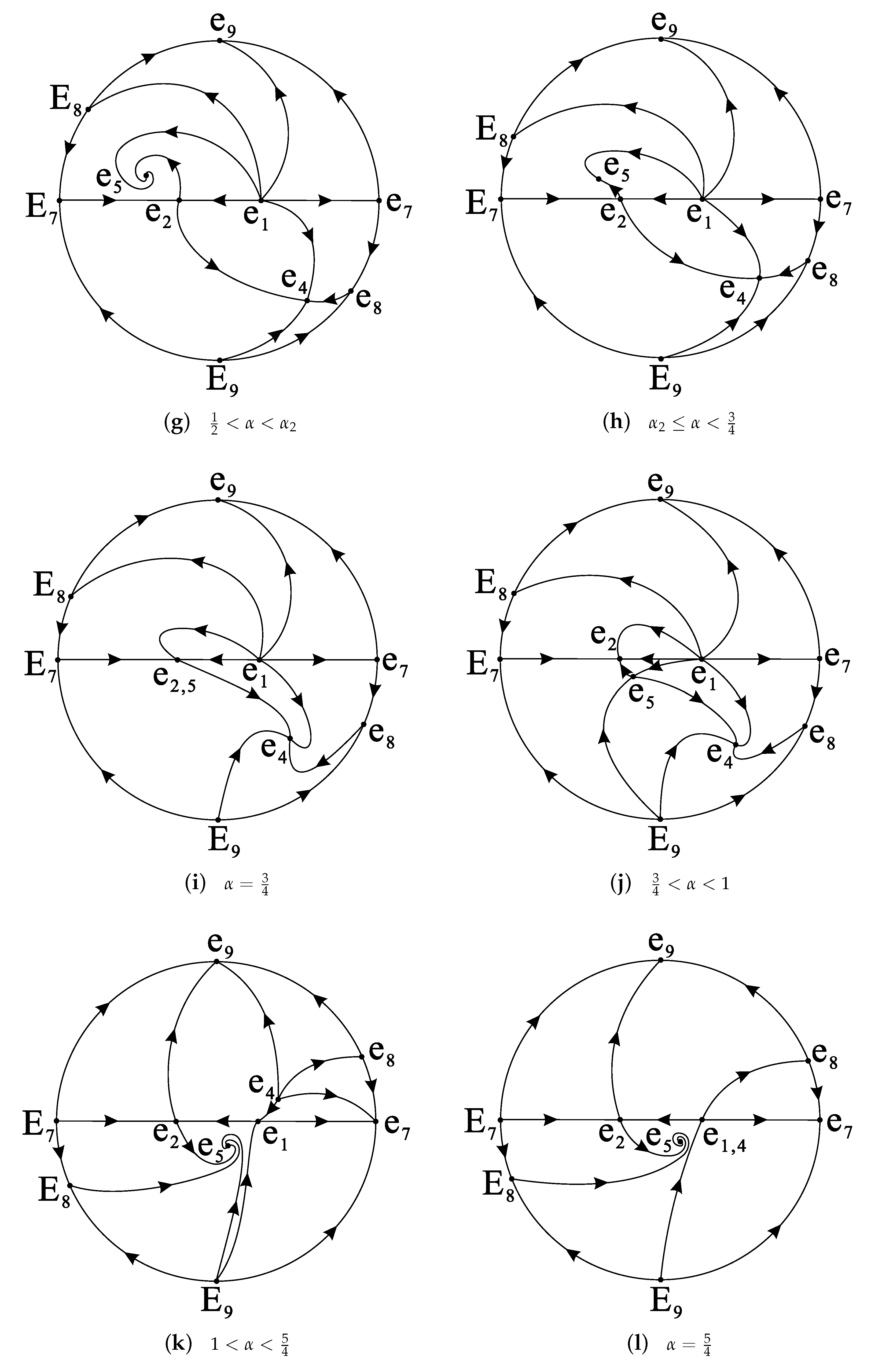
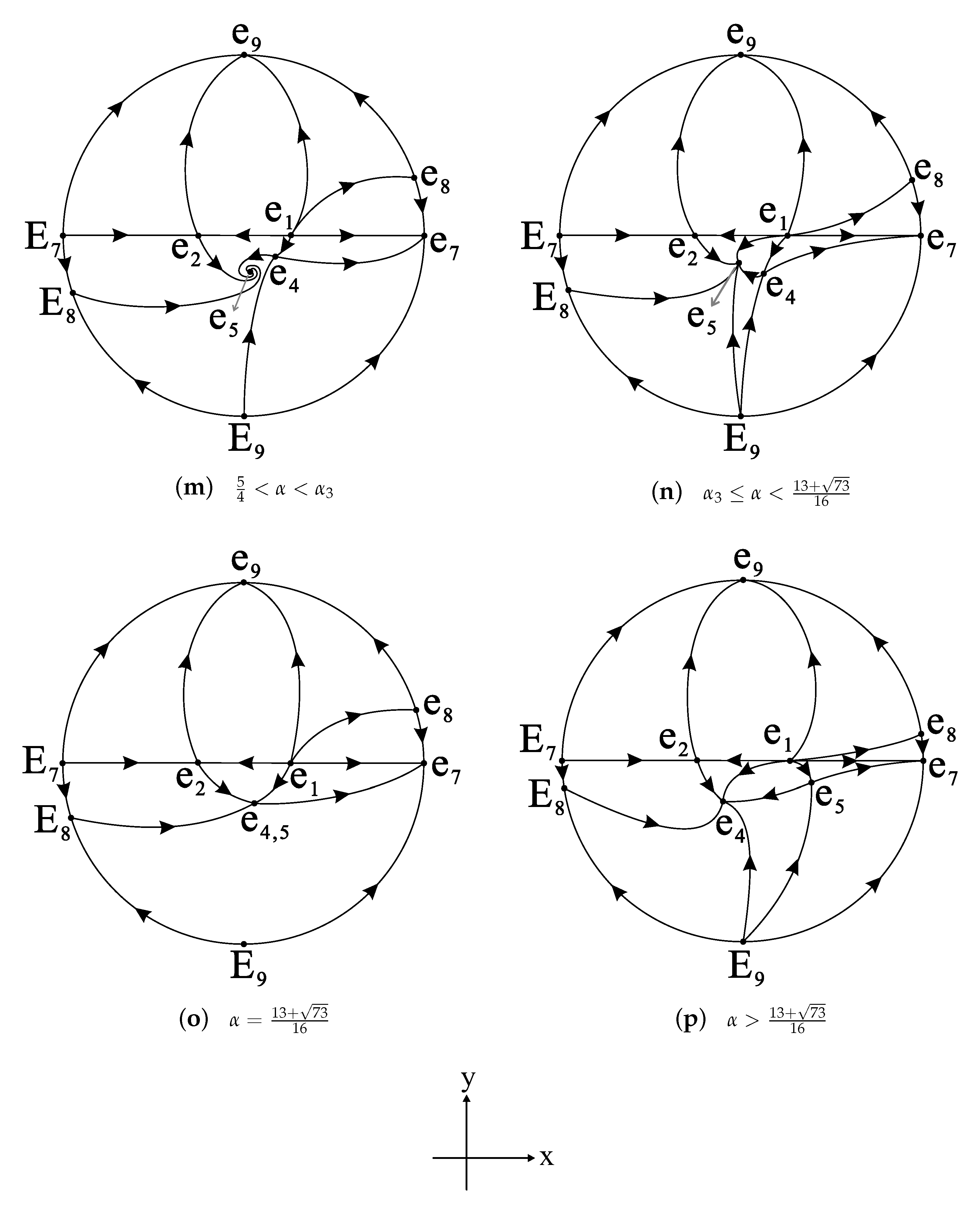
Figure 2.
Local phase portrait of .

Figure 3.
Phase portraits on .
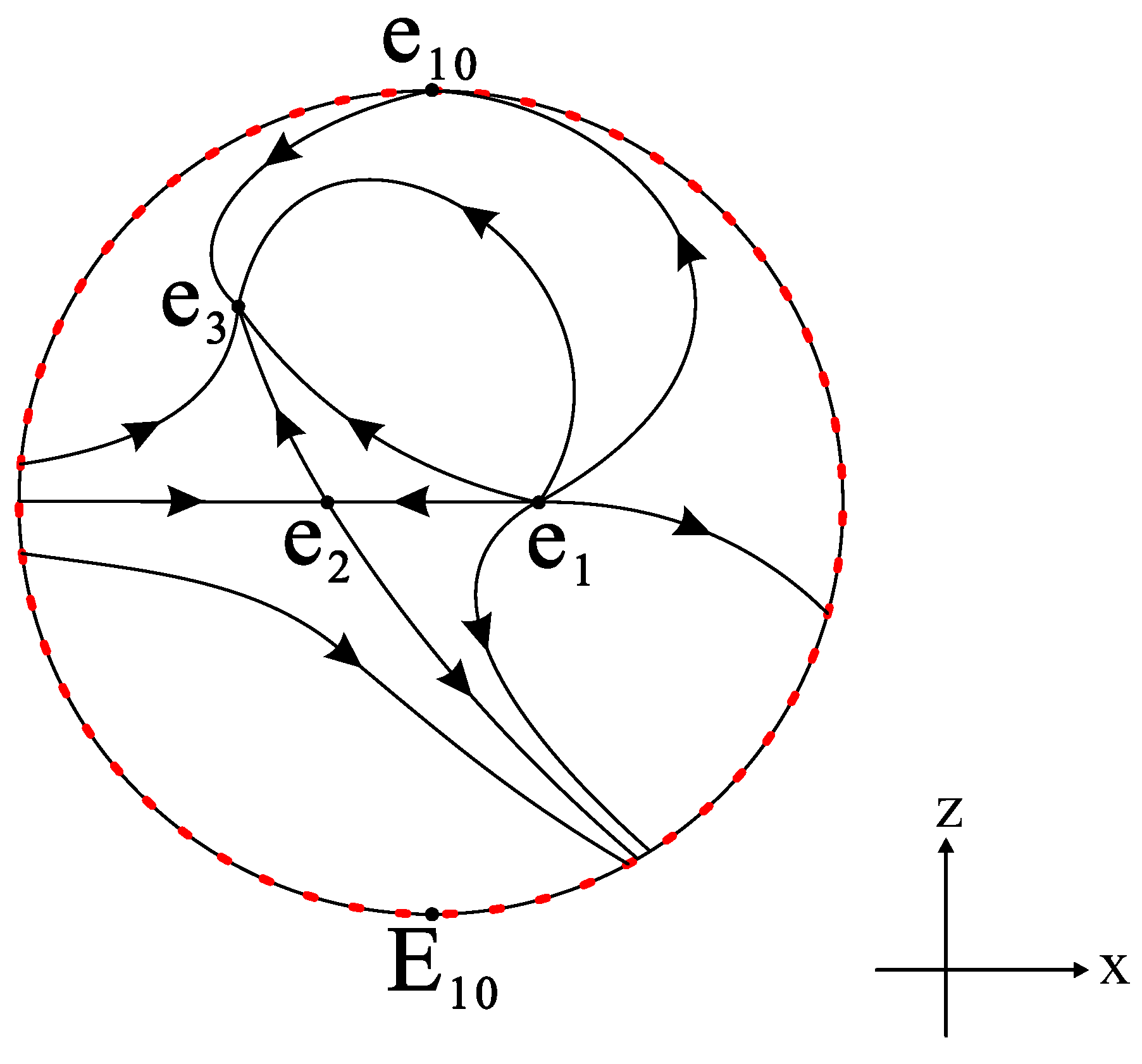
Figure 4.
(a–n) Phase portraits on .
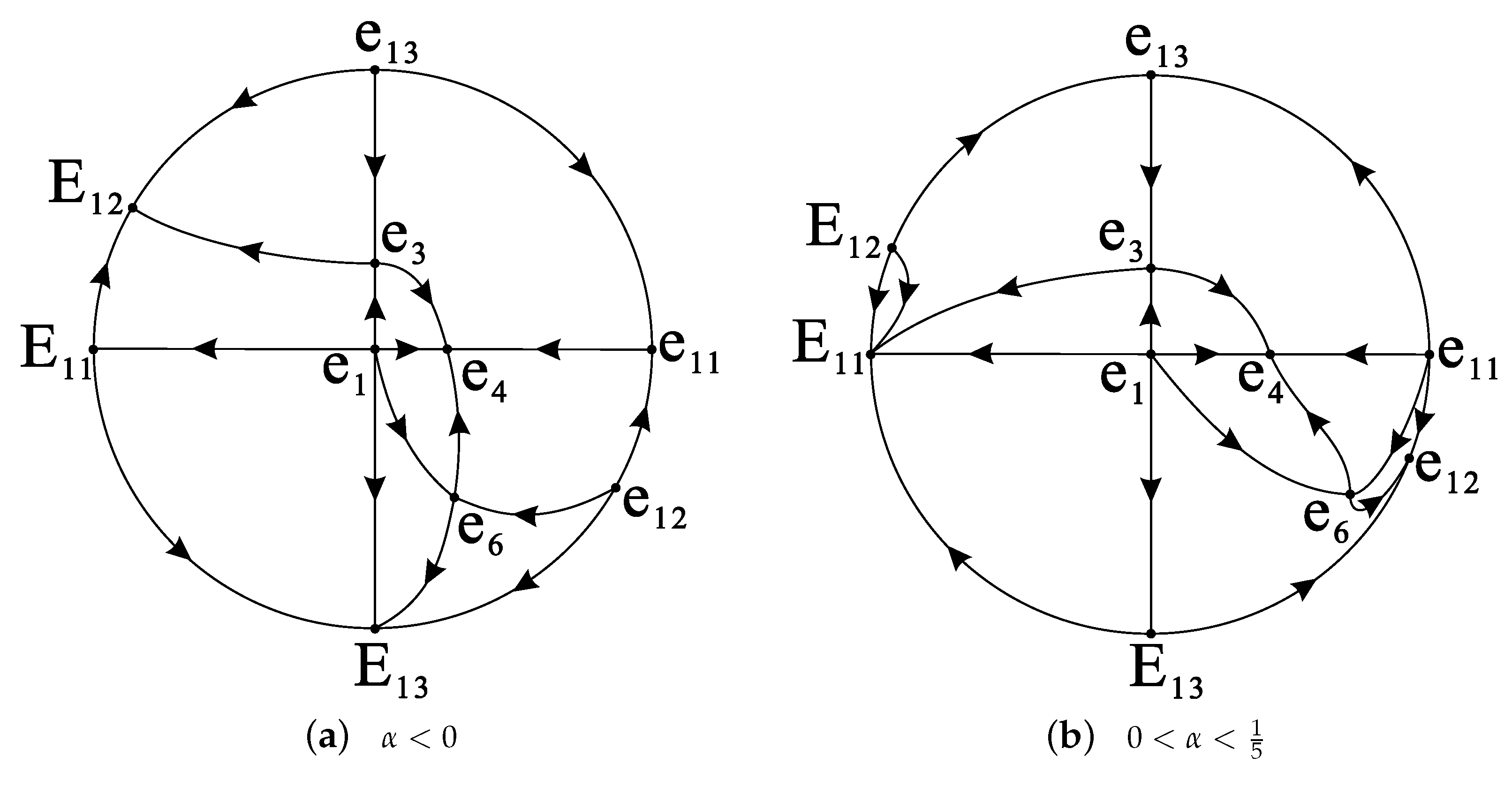

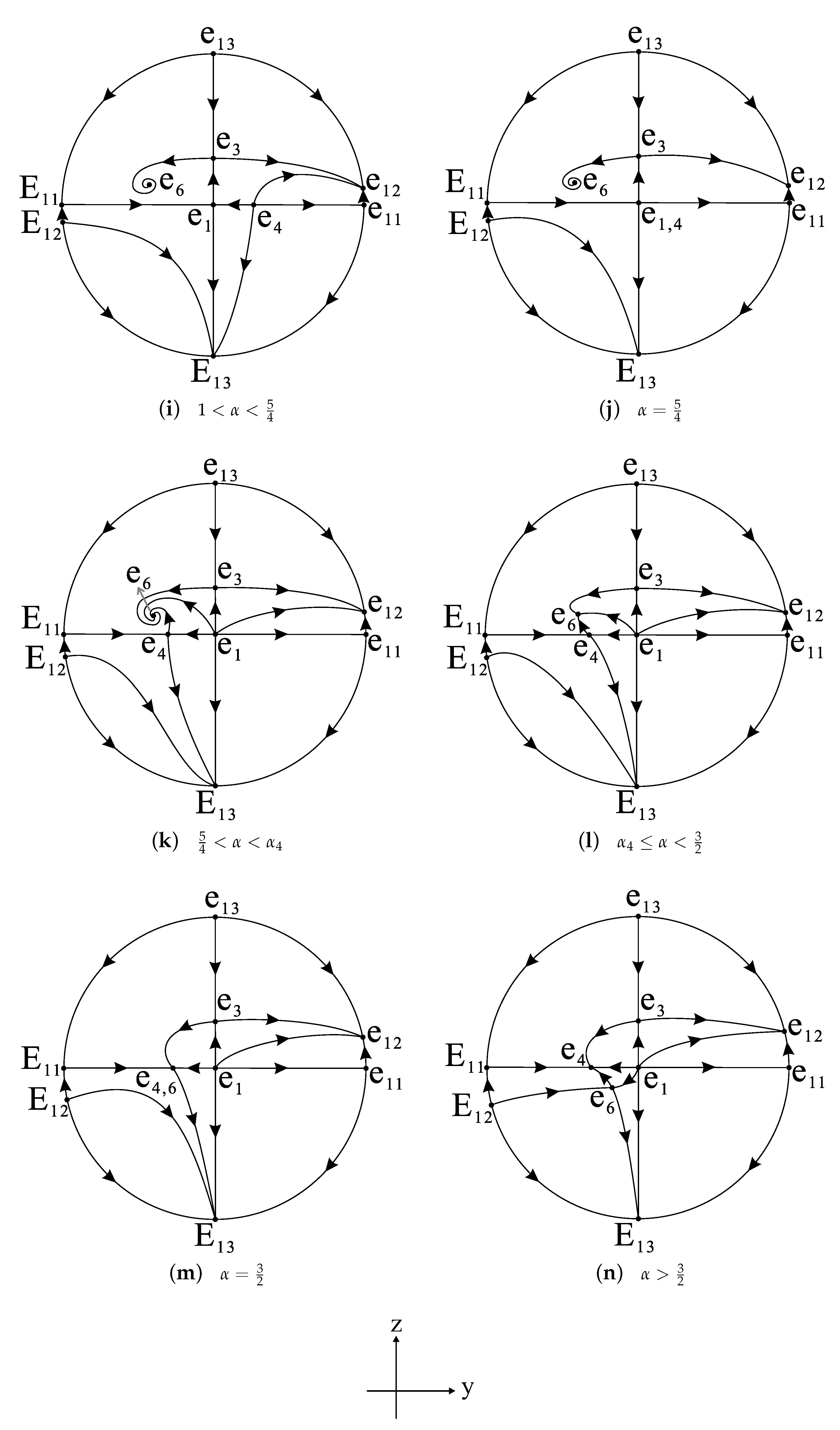
Figure 5.
Phase portraits of system (21) on three invariant planes when .
Figure 5.
Phase portraits of system (21) on three invariant planes when .
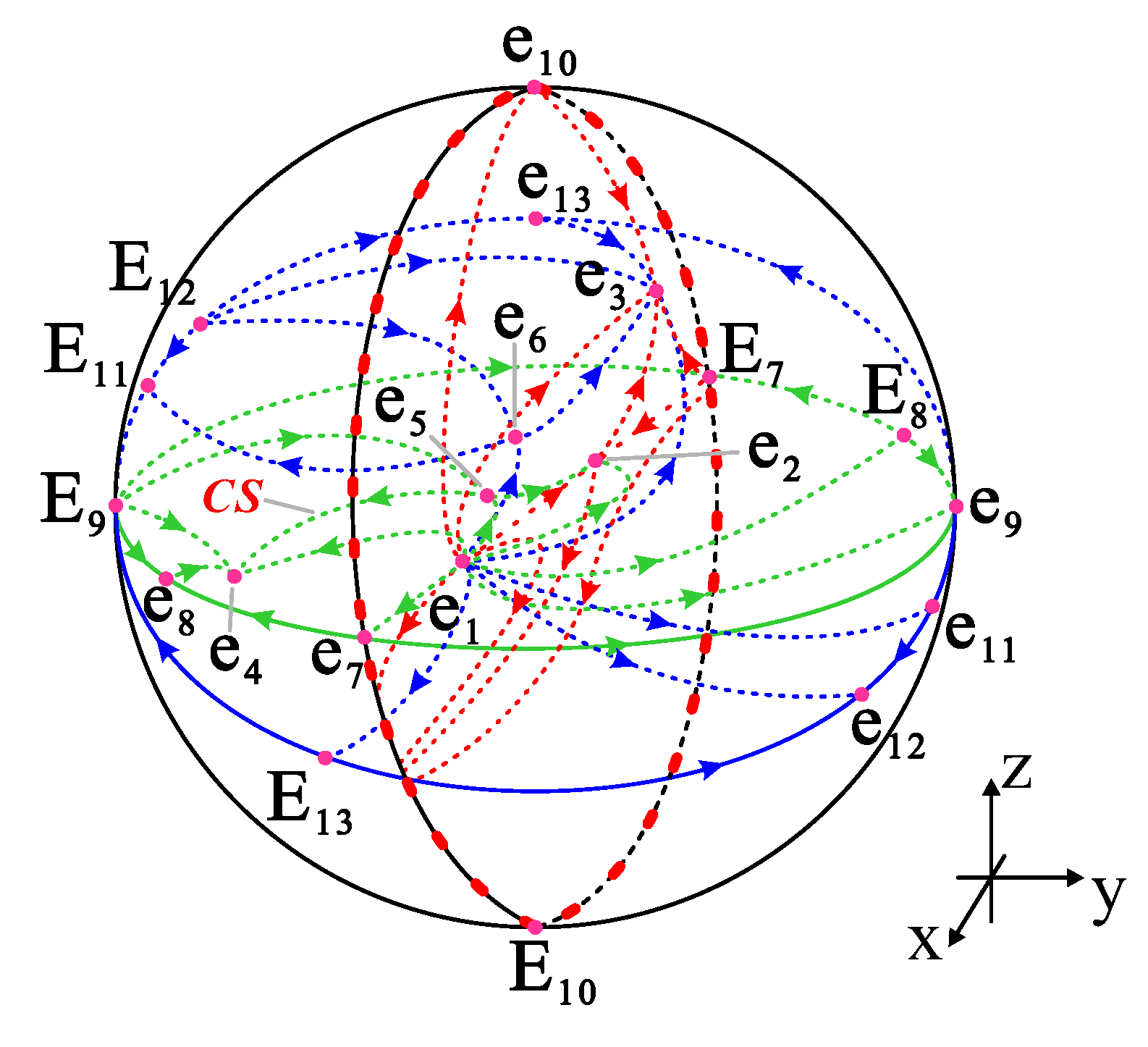
Figure 6.
Phase portraits of system (21) on three invariant planes when .
Figure 6.
Phase portraits of system (21) on three invariant planes when .

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Equilibrium points of system (21).
Table 1.
Equilibrium points of system (21).
| Equilibrium Points | Coordinates | Scale Factor | ||
|---|---|---|---|---|
| () | 0 | |||
| () | 2 | |||
| () | 0 | |||
| () | 0 | |||
| () | ||||
| () | 0 |
Table 2.
Finite equilibrium points and their types for different values of of system (21).
Table 2.
Finite equilibrium points and their types for different values of of system (21).
| Values of | Finite Equilibrium Points |
|---|---|
| or or | is an unstable node, , , and are saddles, is a stable node |
| or | is an unstable node, , , and are saddles, and have a 2DSM |
or or | is an unstable node, , , and are saddles, is a stable node |
| is an unstable node, and are saddles, and have a 1DUM and a 1DSM, is a stable node | |
| is an unstable node, , and are saddles, is a NHEP, is a stable node | |
| is an unstable node, and are saddles, and have a 2DSM, is a NHEP | |
| is an unstable node, , and are saddles, is a stable node, is a NHEP | |
| is an unstable node, and are saddles, and are stable nodes, is a NHEP | |
| or | is an unstable node, , , and are saddles, and are stable nodes |
| is an unstable node, and have a 1DUM and a 1DSM, and are stable nodes, is a saddle | |
| , , and is a saddle, is an unstable node, and are NHEPs | |
| and have a 2DUM, and are saddles, and are NHEPs | |
| is an unstable node, , , and are saddles, and are NHEPs | |
or | is an unstable node, , , , and are saddles, is a NHEP |
| is an unstable node, and are saddles, and have a 1DUM and a 1DSM, is a NHEP |
Note: 2DSM: two-dimensional stable manifold. 1DUM: one-dimensional unstable manifold. 1DSM: one-dimensional stable manifold. NHEP: non-hyperbolic equilibrium point.
Table 3.
Equilibrium points and their types corresponding to various values of system (25).
Table 3.
Equilibrium points and their types corresponding to various values of system (25).
| Values of | Finite Equilibrium Points | Infinite Equilibrium Points |
|---|---|---|
| is an unstable node, and are saddles, is a stable node | is a stable node, is a saddle, is an unstable node | |
| is an unstable node, and are saddles, is a stable node | is a saddle, and are stable nodes | |
| is an unstable node, is a saddle, and are saddle-nodes | is a saddle, and are stable nodes | |
| is an unstable node, and are saddles, is a stable node | is a saddle, and are stable nodes | |
| is an unstable node, and are saddles, is a stable focus | is a saddle, and are stable nodes | |
| is an unstable node, is a saddle, is a stable focus | is a saddle, is a saddle-node, is a stable node | |
| is an unstable node, is a saddle, is a stable node, is a stable focus | and are saddles, is a stable node | |
| is an unstable node, is a saddle, and are stable nodes | and are saddles, is a stable node | |
| is an unstable node, and are saddle-nodes, is a stable node | and are saddles, is a stable node | |
| is an unstable node, and are stable nodes, is a saddle | and are saddles, is a stable node | |
| and are saddles, is an unstable node, is a stable focus | and are stable nodes, is a saddle | |
| and are saddle-nodes, is a saddle, is a stable focus | and are stable nodes, is a saddle | |
| is an unstable node, and are saddles, is a stable focus | and are stable nodes, is a saddle | |
| is an unstable node, and are saddles, is a stable node | and are stable nodes, is a saddle | |
| is an unstable node, is a saddle, and are saddle-nodes | and are stable nodes, is a saddle | |
| is an unstable node, and are saddles, is a stable node | and are stable nodes, is a saddle |
Table 4.
Equilibrium points and their types for different values of of system (35).
Table 4.
Equilibrium points and their types for different values of of system (35).
| Values of | Finite Equilibrium Points | Infinite Equilibrium Points |
|---|---|---|
| is an unstable node, and are saddles, is a stable node | is a saddle, and are unstable nodes | |
| is an unstable node, and are saddles, is a stable node | is an unstable node, is a stable node, is a saddle | |
| is an unstable node, is a saddle, and are saddle-nodes | is an unstable node, is a stable node, is a saddle | |
| is an unstable node, and are saddles, is a stable node | is an unstable node, is a stable node, is a saddle | |
| is an unstable node, and are saddle-nodes, is a saddle | is an unstable node, is a stable node, is a saddle | |
| is an unstable node, is a stable node, and are saddles | is an unstable node, is a stable node, is a saddle | |
| is an unstable node, is a stable node, is a saddle | is a saddle-node, is a stable node, is a saddle | |
| is an unstable node, and are stable nodes, is a saddle | and are saddles, is a stable node | |
| and are saddles, is an unstable node, is a stable focus | is a saddle, is a stable node, is an unstable node | |
| and are saddle-nodes, is a saddle, is a stable focus | is a saddle, is a stable node, is an unstable node | |
| is an unstable node, and are saddles, is a stable focus | is a saddle, is a stable node, is an unstable node | |
| is an unstable node, and are saddles, is a stable node | is a saddle, is a stable node, is an unstable node | |
| is an unstable node, is a saddle, and are saddle-nodes | is a saddle, is a stable node, is an unstable node | |
| is an unstable node, and are saddles, is a stable node | is a saddle, is a stable node, is an unstable node |
Table 5.
Equilibrium points of system (44).
Table 5.
Equilibrium points of system (44).
| Equilibrium Points | Coordinates | ||
|---|---|---|---|
| () | 0 | ||
| () | 2 | ||
| () | 0 | ||
| () | 0 | ||
| () | 0 | ||
| () | |||
| () | 0 | ||
| () | 0 |
Table 6.
Eigenvalues of equilibrium points.
| Equilibrium Points | Eigenvalues |
|---|---|
Note: a(m,m′) = {m2(m + 1)2 + rm′[−2m(m + 1) + 2(m − 1)mr + r(1 + r2)m′]}1/2, b(m) ≡ [m(256m3 + 160m2 − 31m − 16)]1/2, c(m) ≡ {m(m + 1)2[m(676m2 + 700m − 55) − 160]}1/2.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, J.; Wang, R.; Gao, F. Dynamics of a Cosmological Model in f(R,T) Gravity: I. On Invariant Planes. Universe 2022, 8, 365. https://doi.org/10.3390/universe8070365
AMA Style
Liu J, Wang R, Gao F. Dynamics of a Cosmological Model in f(R,T) Gravity: I. On Invariant Planes. Universe. 2022; 8(7):365. https://doi.org/10.3390/universe8070365
Chicago/Turabian StyleLiu, Jianwen, Ruifang Wang, and Fabao Gao. 2022. "Dynamics of a Cosmological Model in f(R,T) Gravity: I. On Invariant Planes" Universe 8, no. 7: 365. https://doi.org/10.3390/universe8070365
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.