Energy Management Scheme for an EV Smart Charger V2G/G2V Application with an EV Power Allocation Technique and Voltage Regulation

 , , ,
, , ,
Abstract
:1. Introduction
- An aggregation-based power reference allocation approach for individual EVs has been established by considering their battery size and SoC.
- The proposed scheme is studied with different types of EVs.
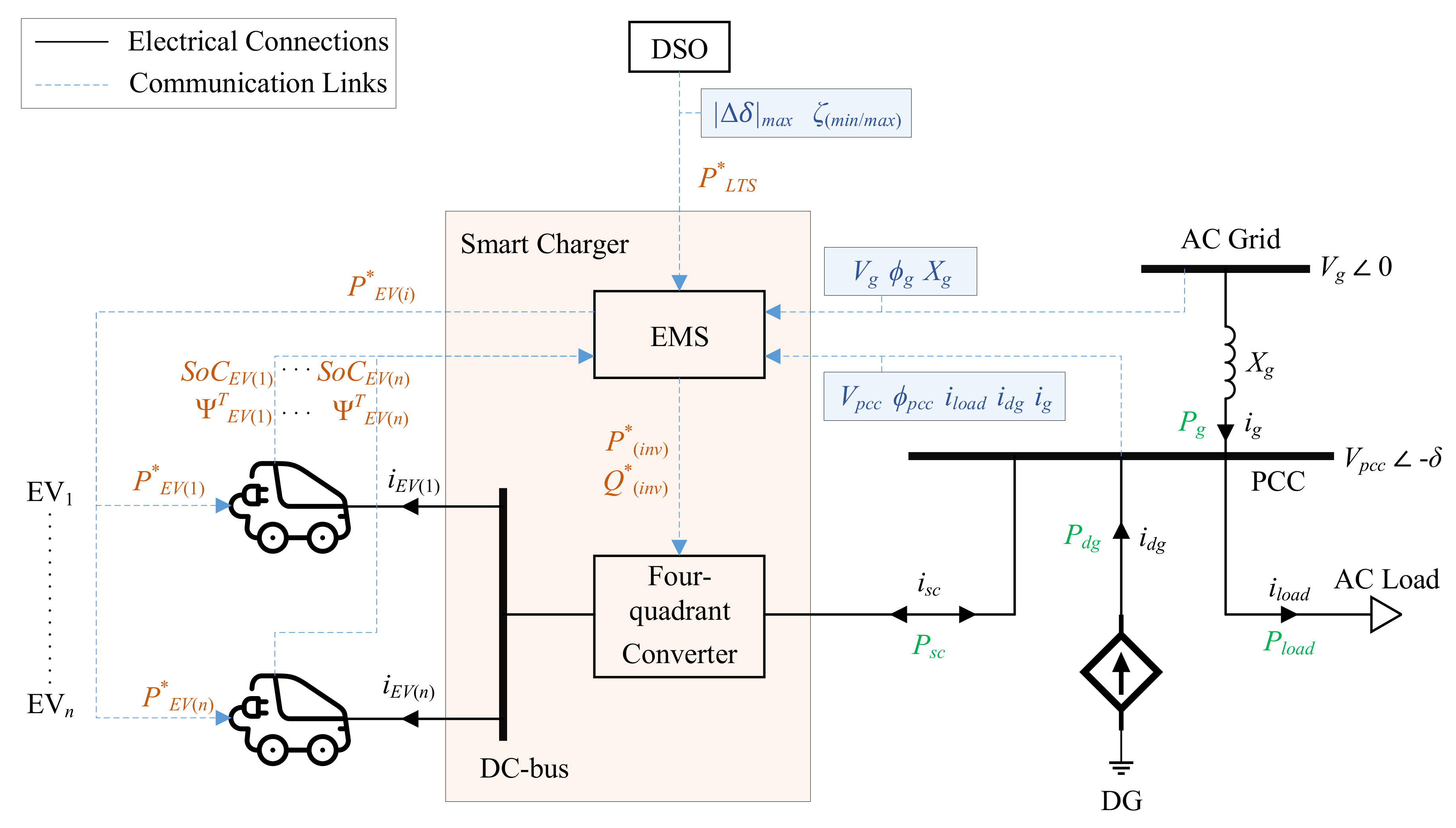
- The EMS calculates instantaneous power references for the EV smart charger and the EV side converters, based on dynamic grid conditions and communication with EVs to prevent off-limit operations.
- Equivalent circuit modeling of power electronics converters and the EMS implementation in the electro-magnetic transient program (EMTP-ATPDraw), utilizing a short time step of 1.667 s and a 6000-Hz converter switching frequency; show the instantaneous behavior of the scheme.
- The EMS can include long-term schemes under the command from the system operator.
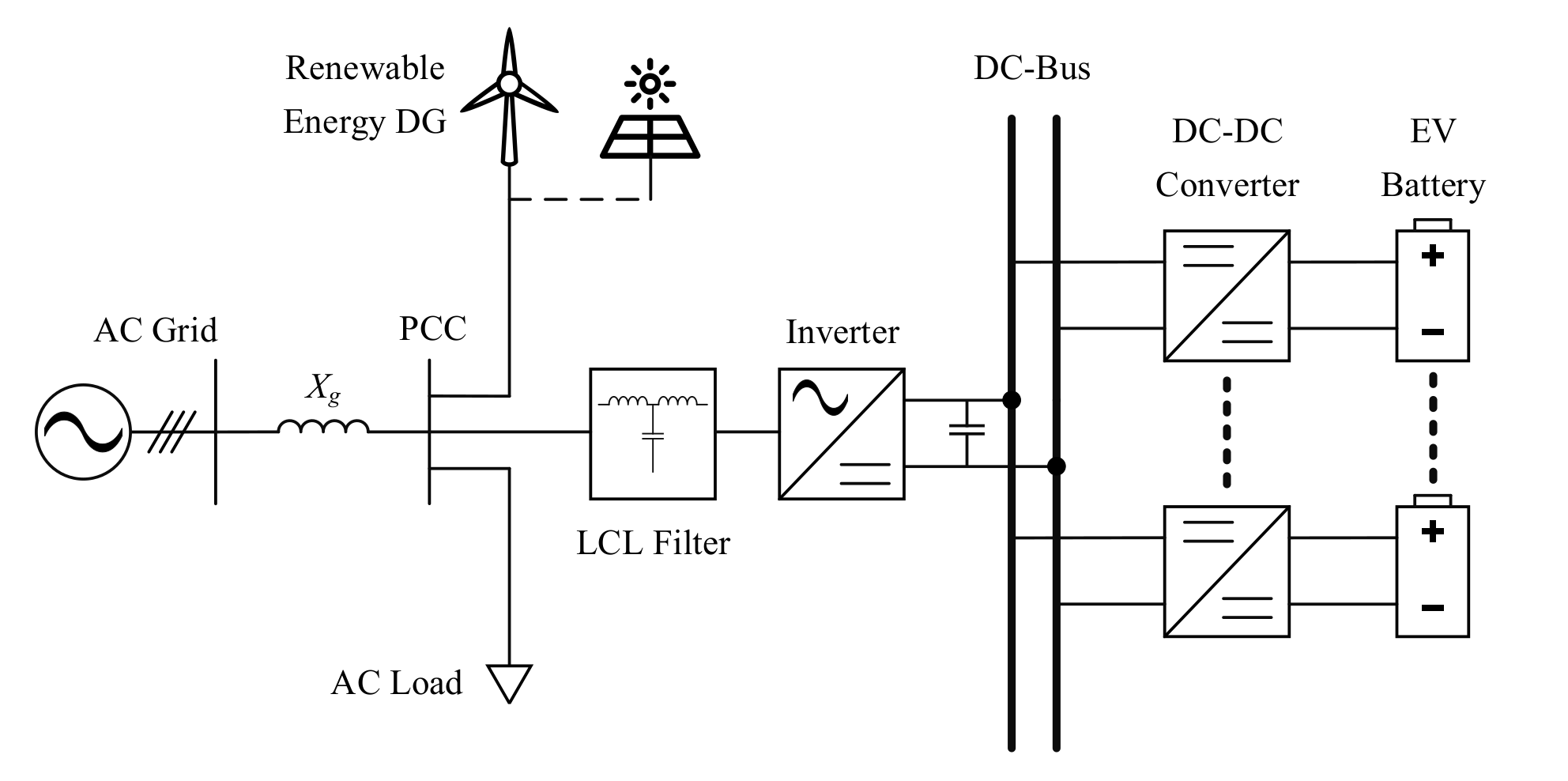
2. Modern Distribution Grids
3. Component Modeling and Control
3.1. DG Model
3.2. EV Battery Model
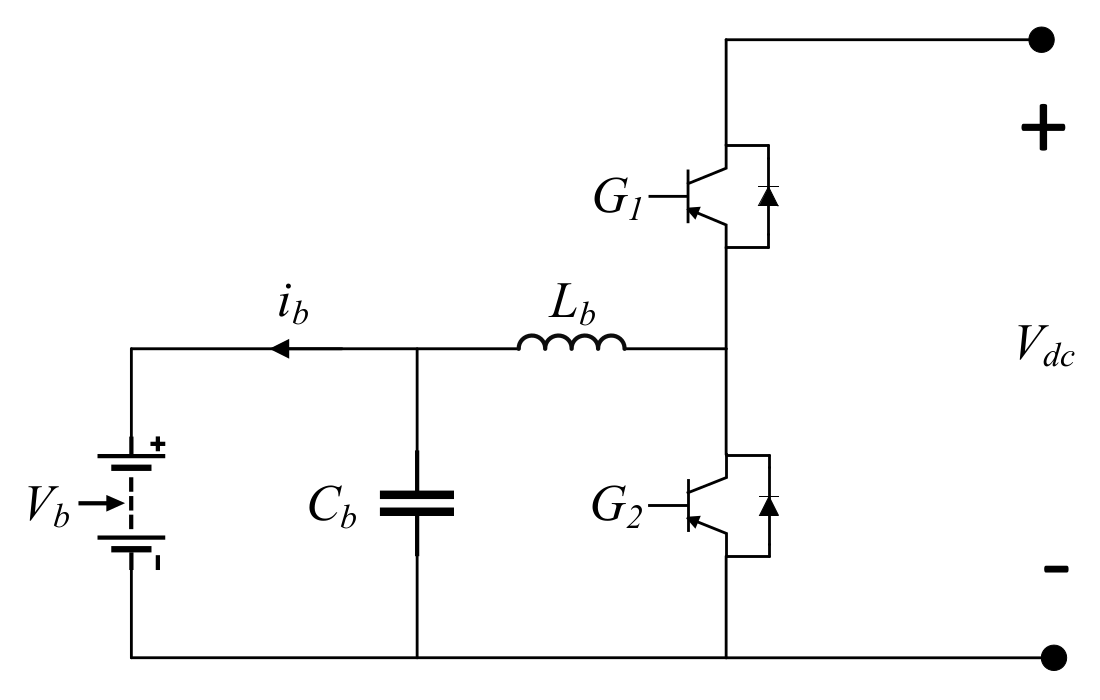
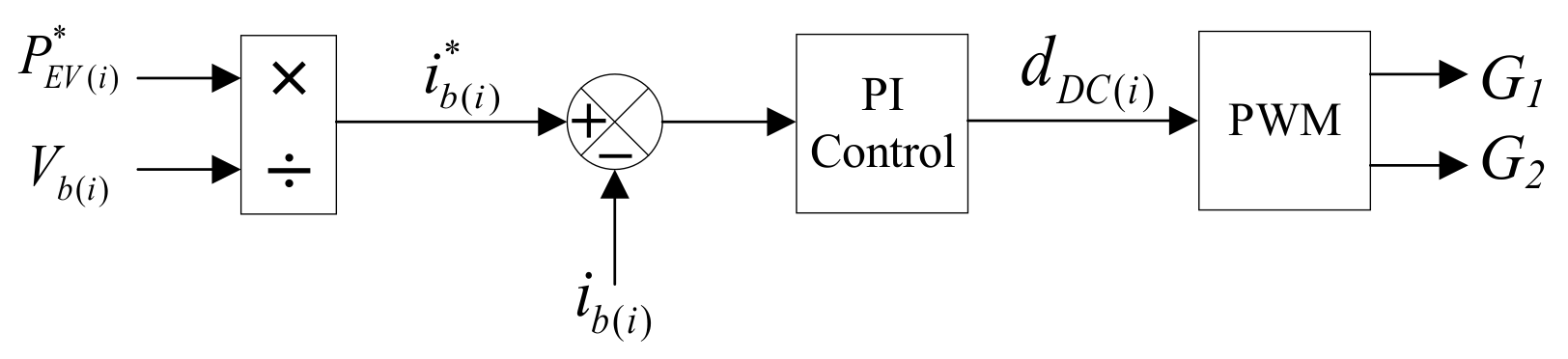
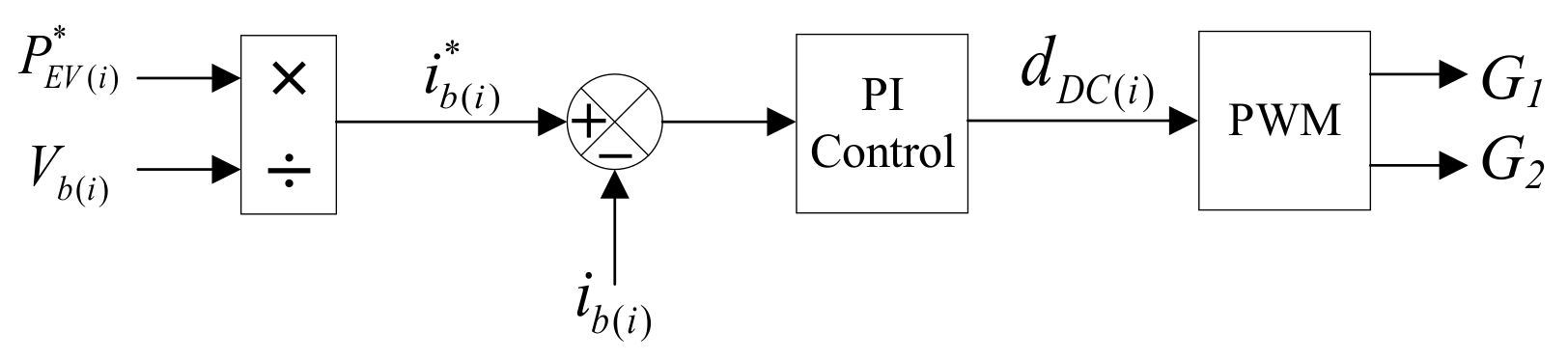
3.3. Bidirectional DC-DC Converter
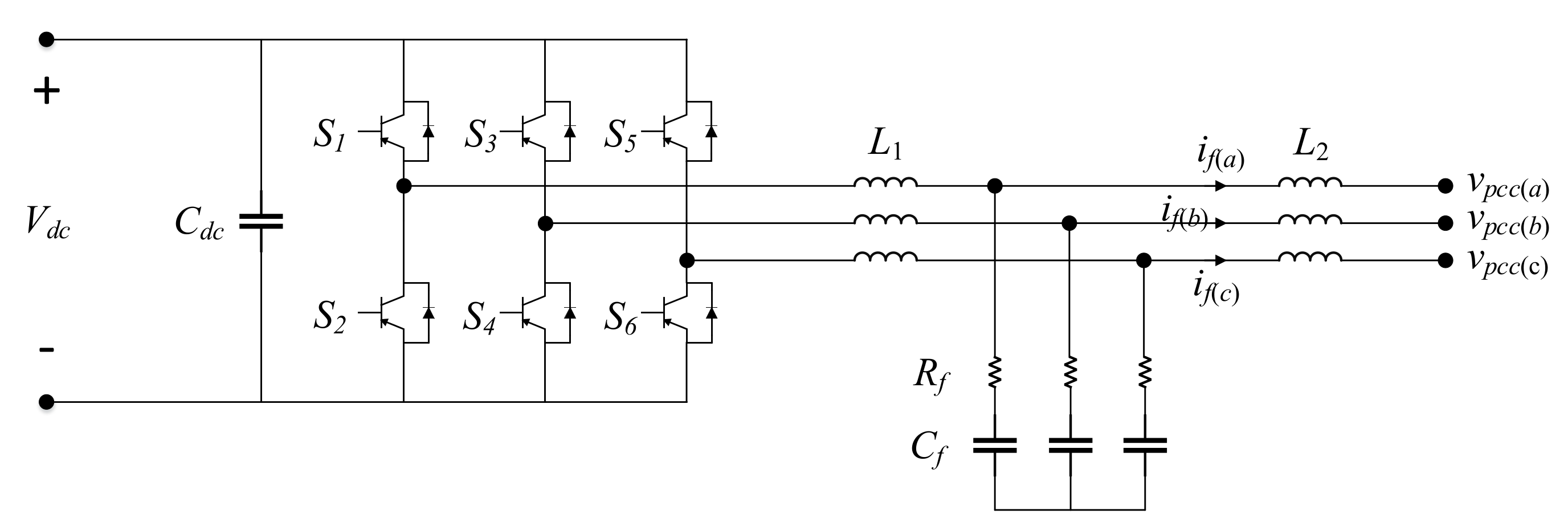
3.4. Four-Quadrant Converter
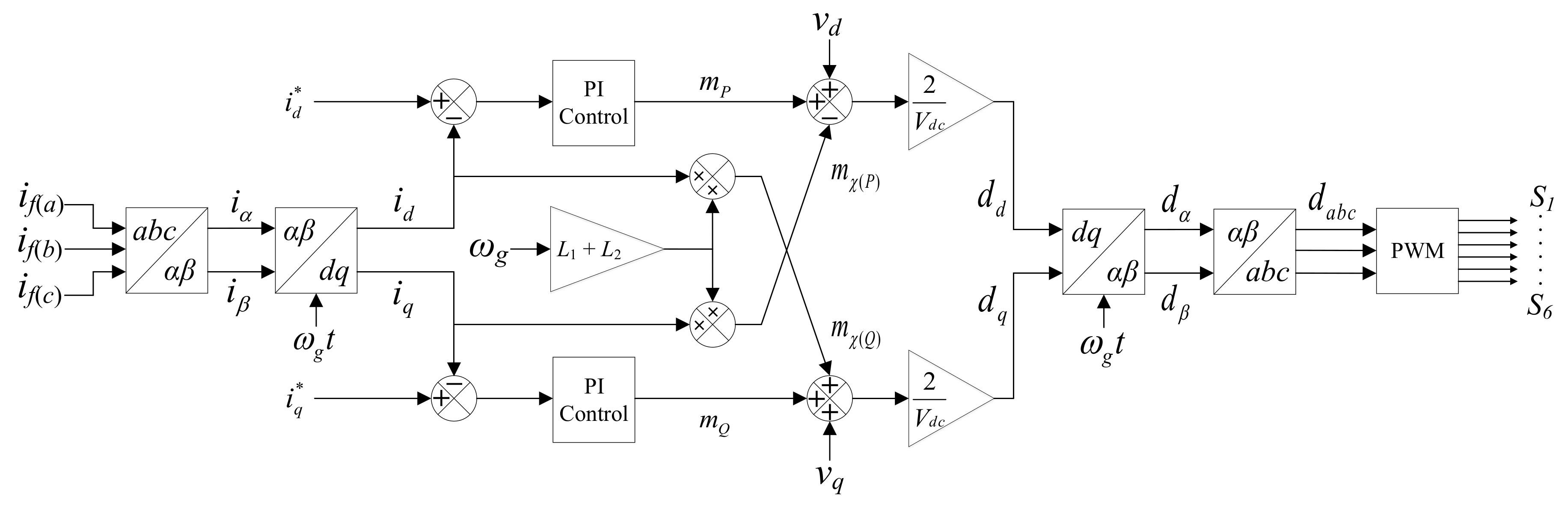
3.5. Four-Quadrant Converter Controller
4. EMS for a Smart Charger
4.1. Active Power Ride-Through
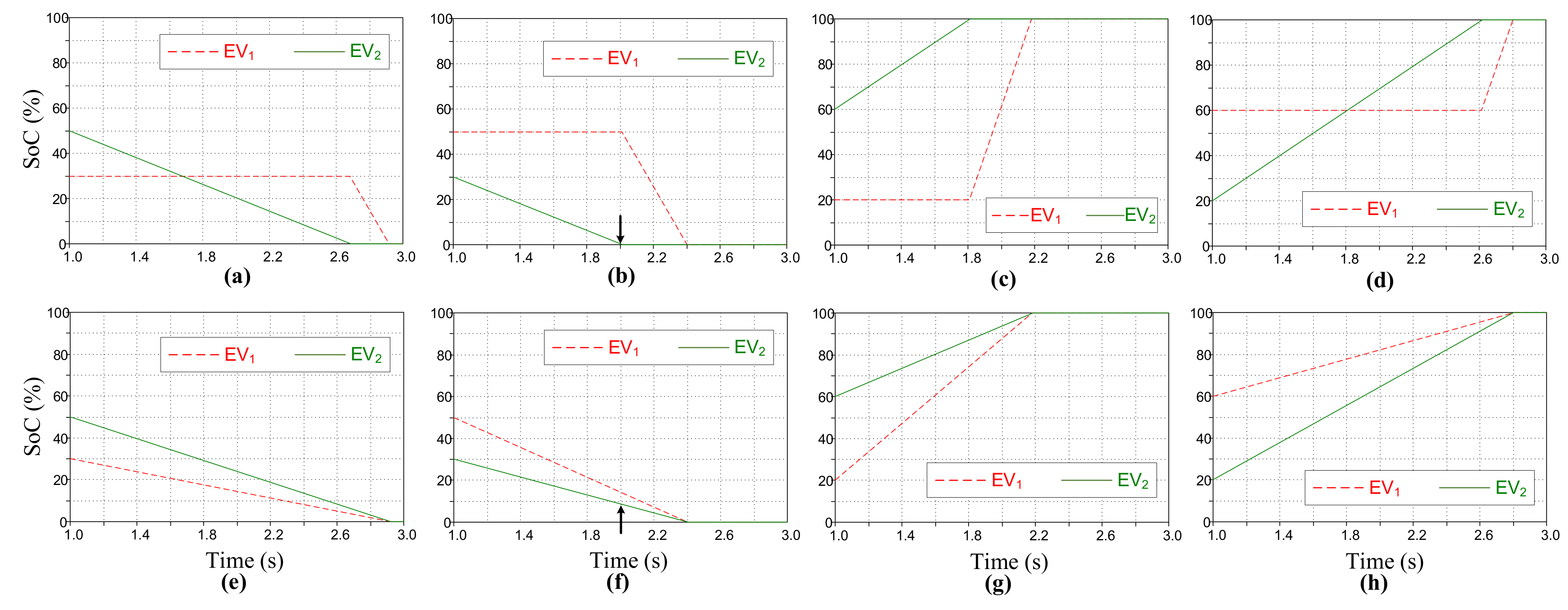
4.2. Proposed Power Allocation Method to EVs
- The EVs have the same battery type and the same SoC.
- For different battery types; equal energy is available on-board each EV.
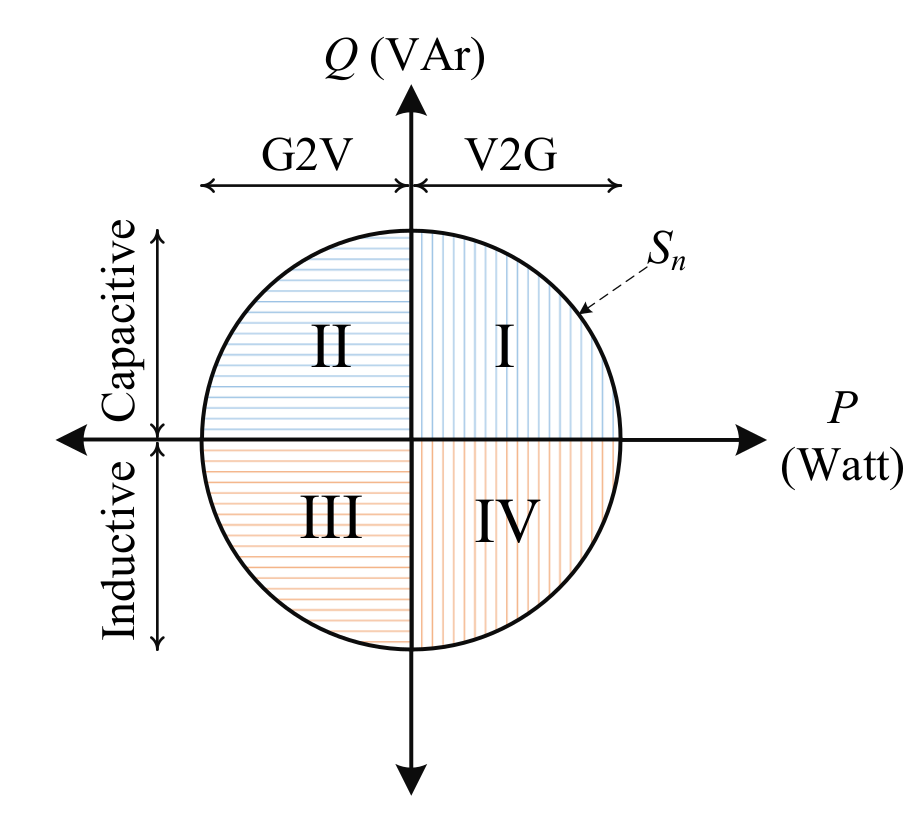
4.3. Reactive Power Support for Voltage Regulation
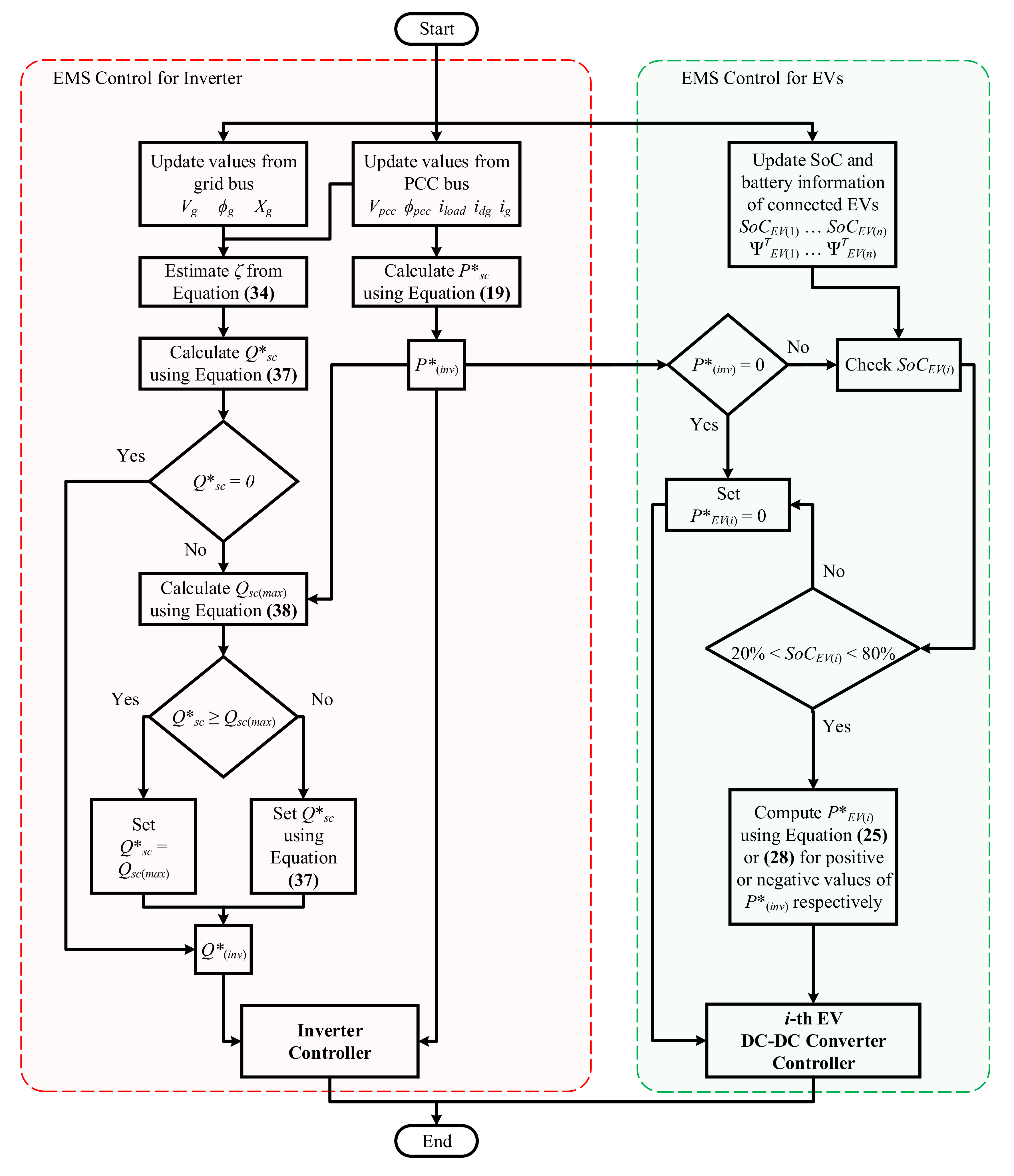
4.4. EMS Control Flow Process
- At each time step, the EMS updates the values of voltages, currents and phase angles from the grid and PCC. The information regarding the EV SoC is updated from the EVs. Since the rated battery capacity is a constant during the whole control process, it is determined from the EV upon the initial connection with the smart charger.
- The reference calculated is final, while the other references and coordinate with it to calculate their conclusive values. The reactive power block receives the reference to calculate the maximum reactive power capacity . Further, it checks that the calculated reactive power reference is within reactive capability. If this condition is breached, the reactive reference is set as . Simultaneously, the EV control block checks the reference and the SoC constraints for the EVs and calculates the power references for individual EVs based on the proposed proportional methodology.
- The computed references and are fed to the inverter controller, while is fed to the controller of the DC-DC converter of the i-th EV. The control advances to the next time step.
5. Simulation Conditions
- The average daily distance covered by a car is 32.6 km [44].
6. Results and Discussion
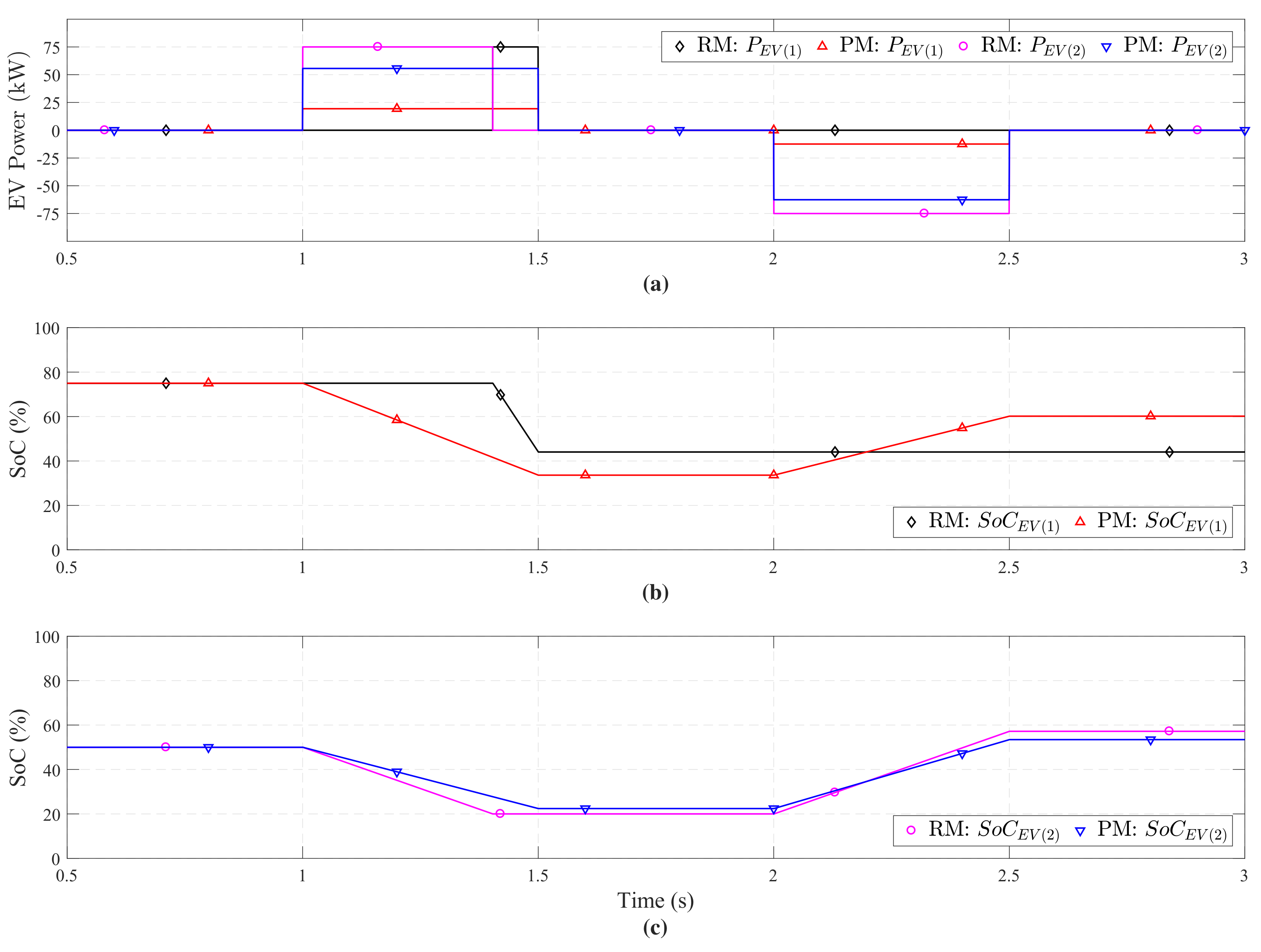
6.1. Power Allocation Schemes Comparison
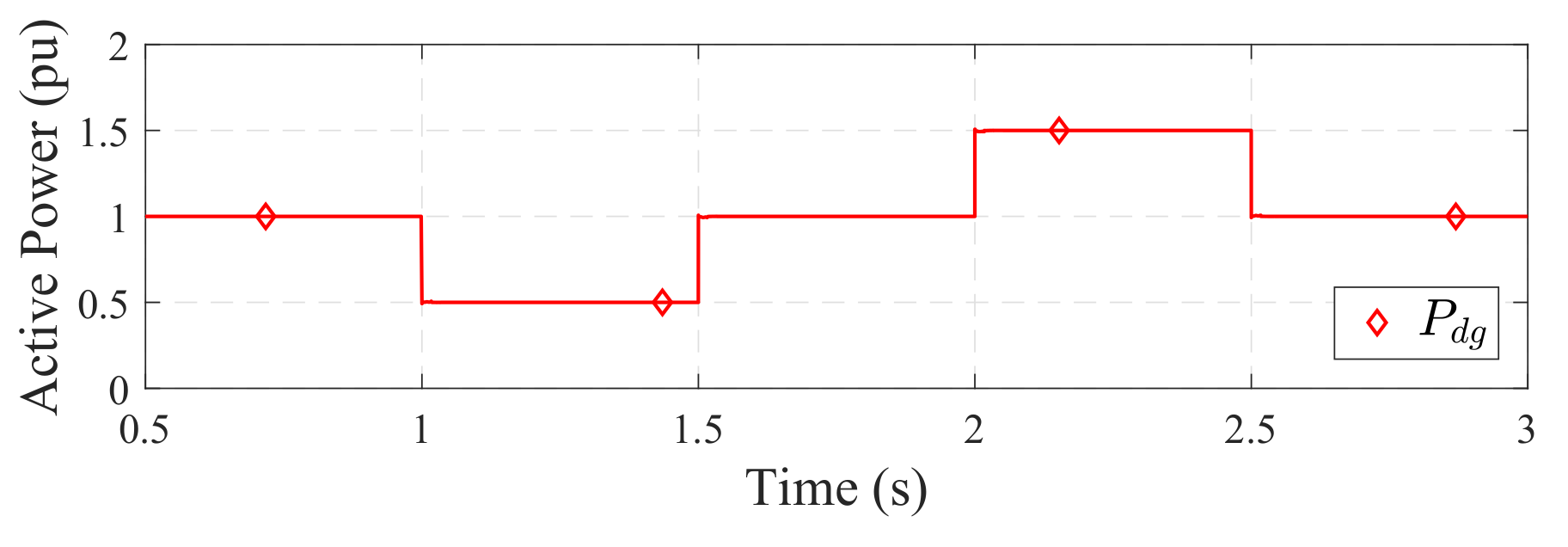
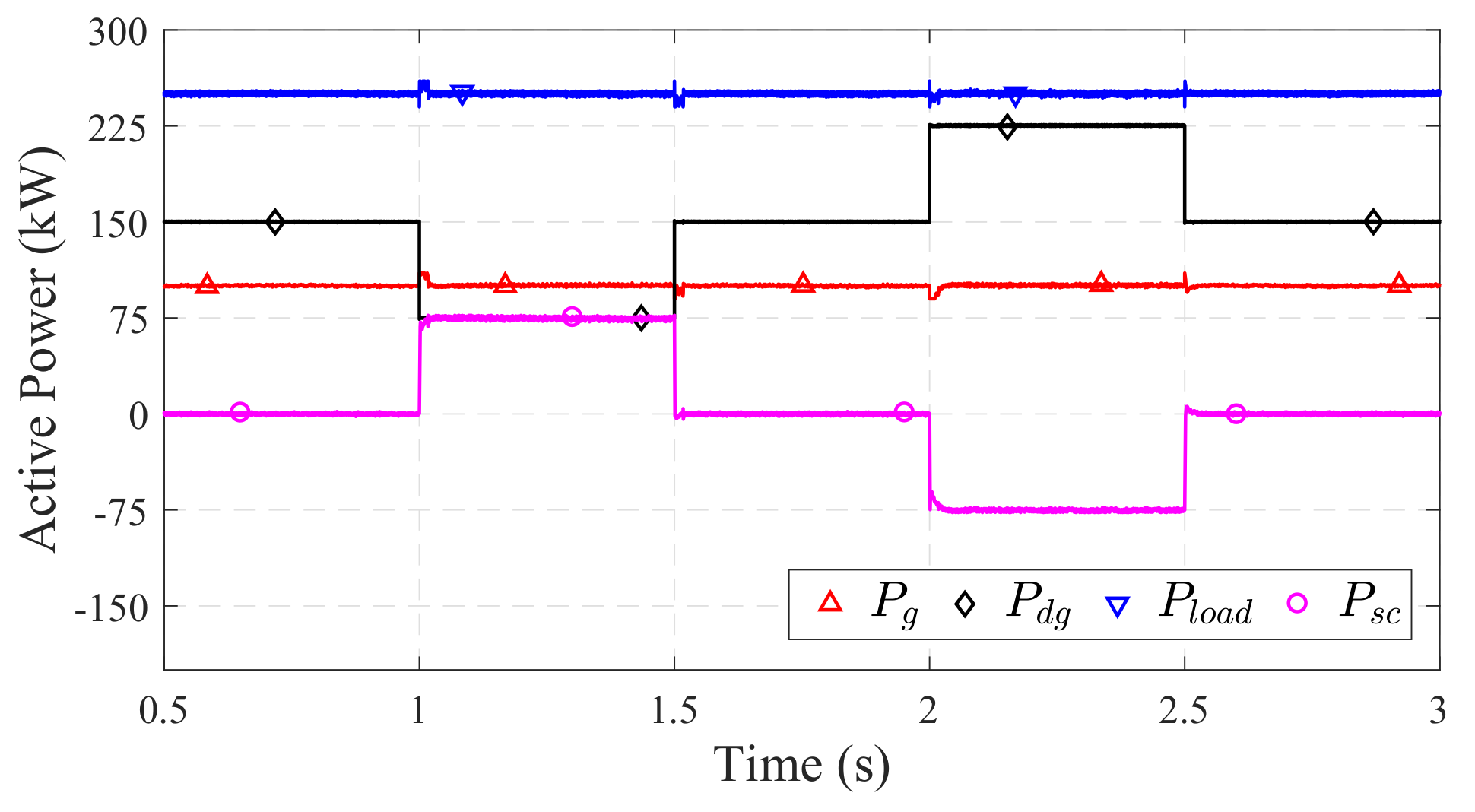
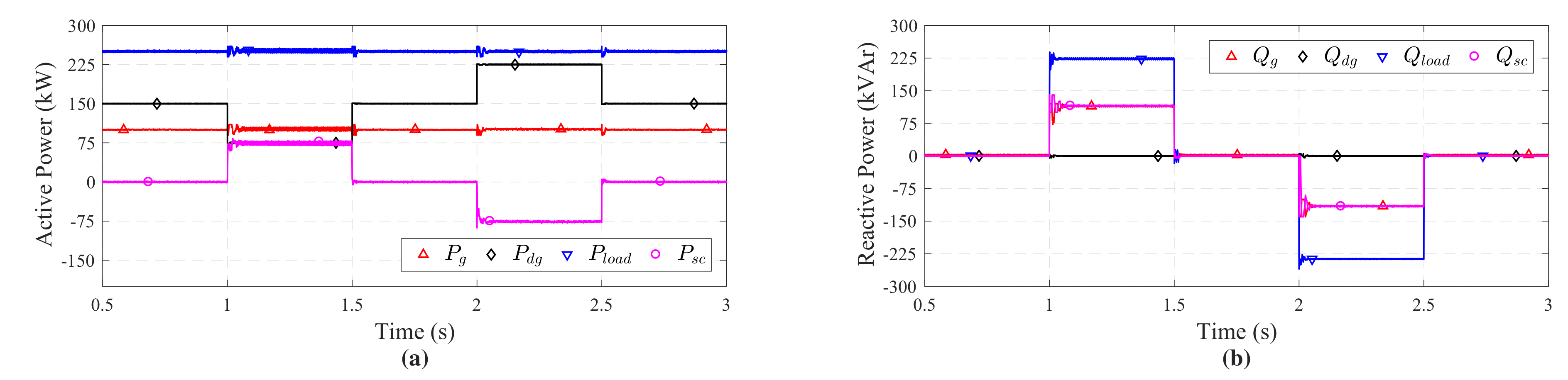
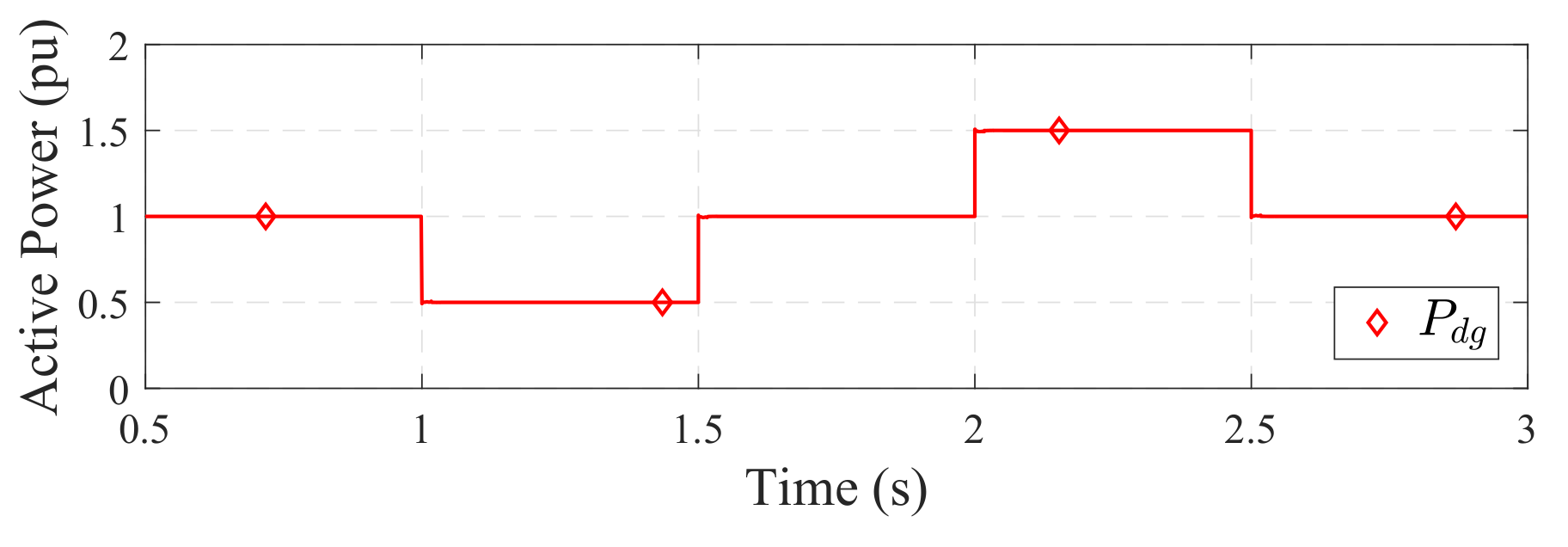
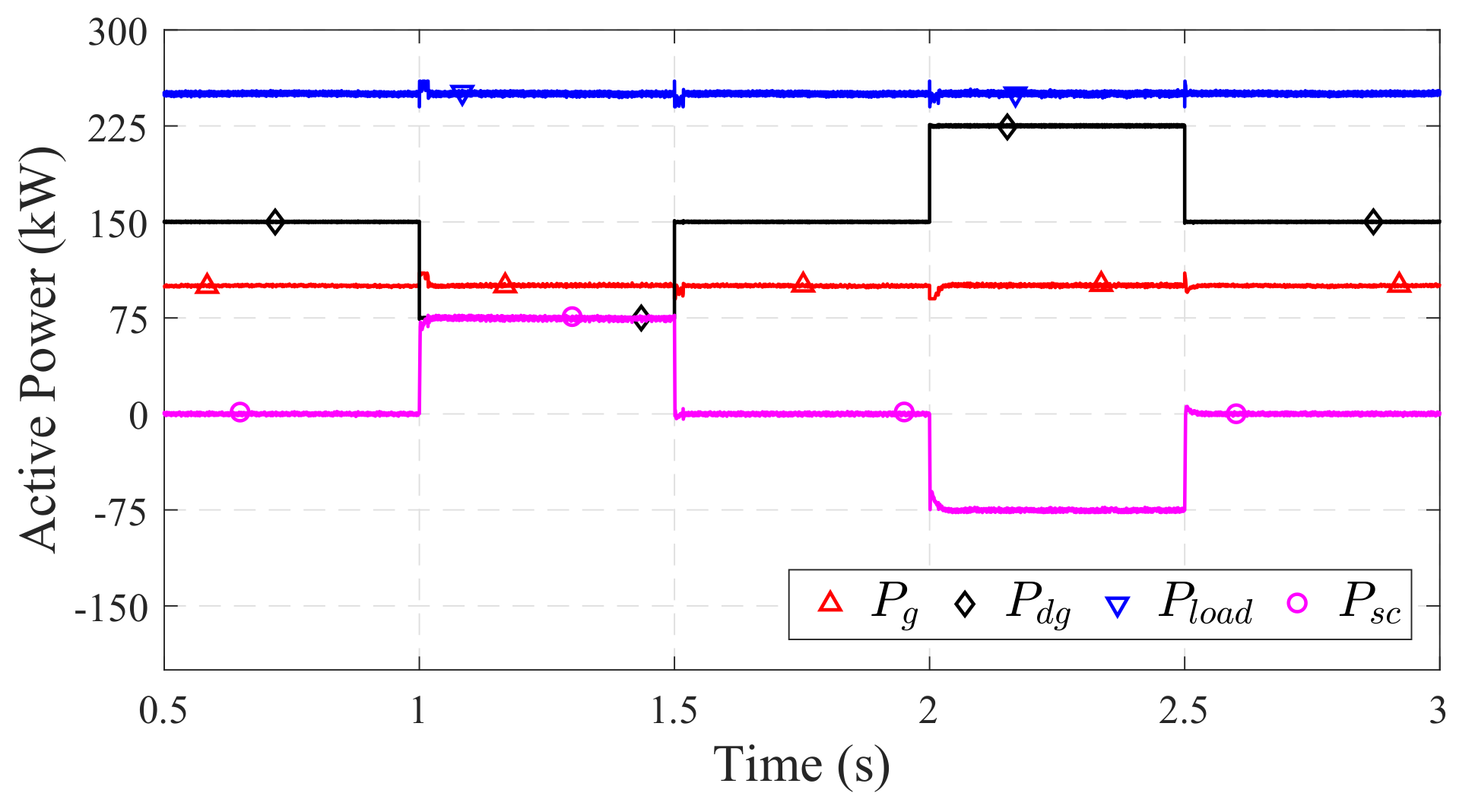
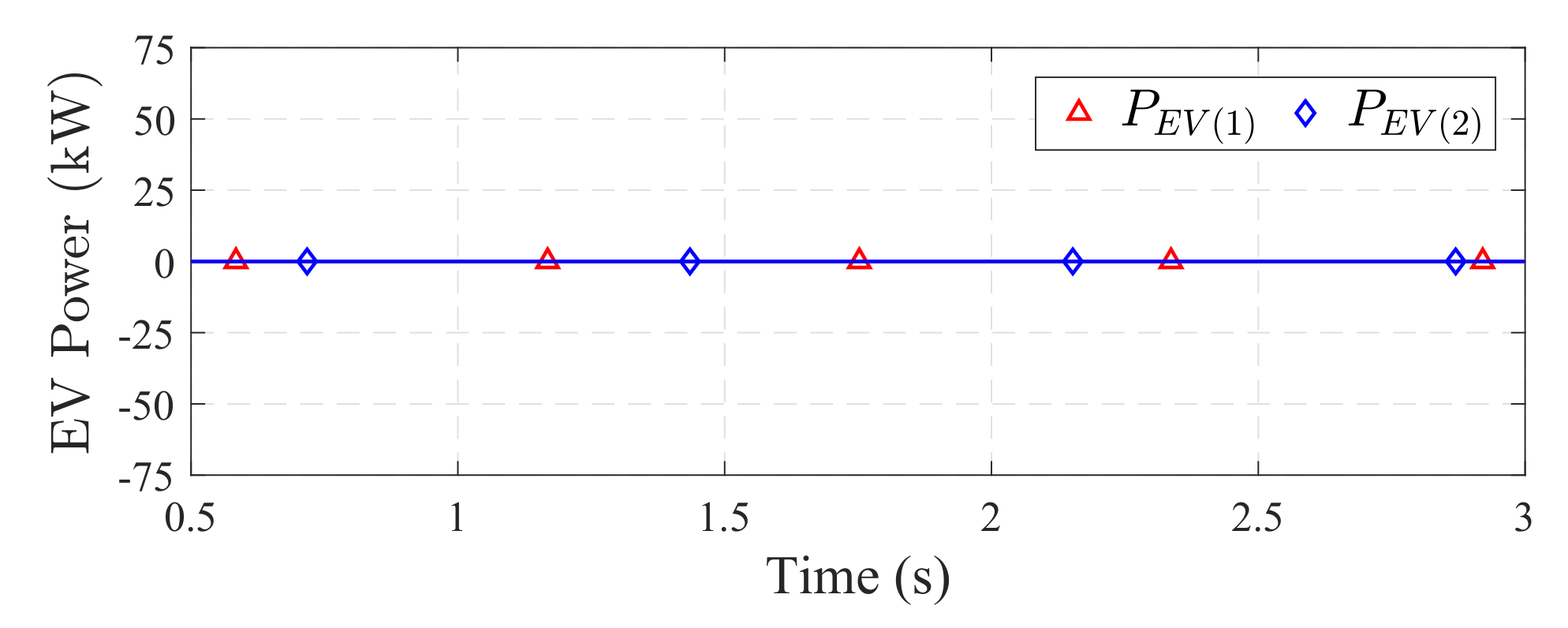
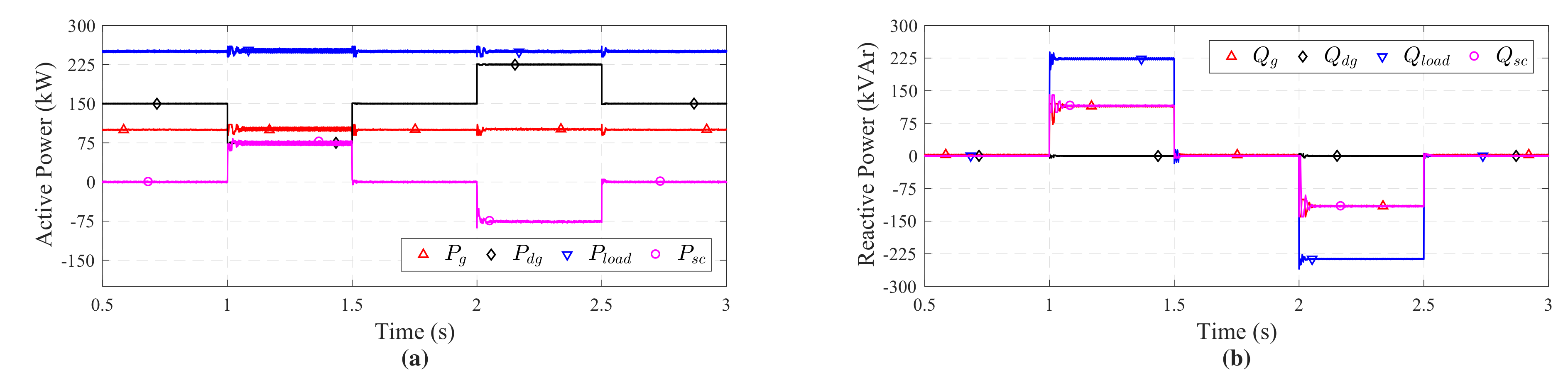
6.2. DG Power Fluctuation Case
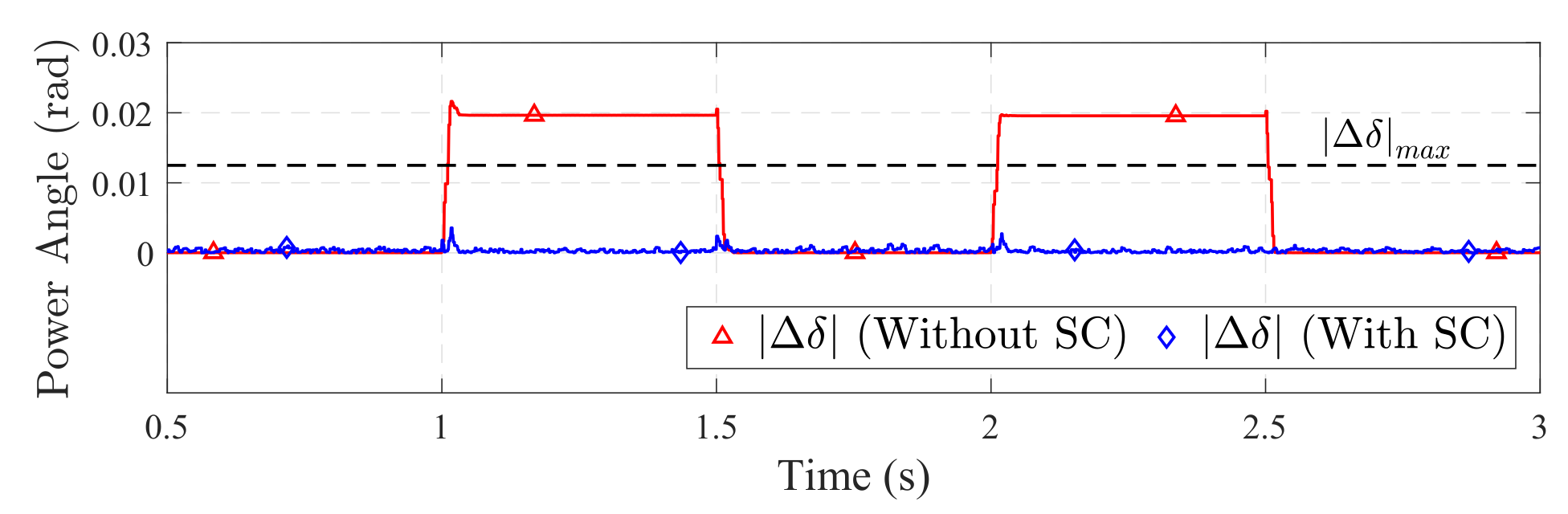
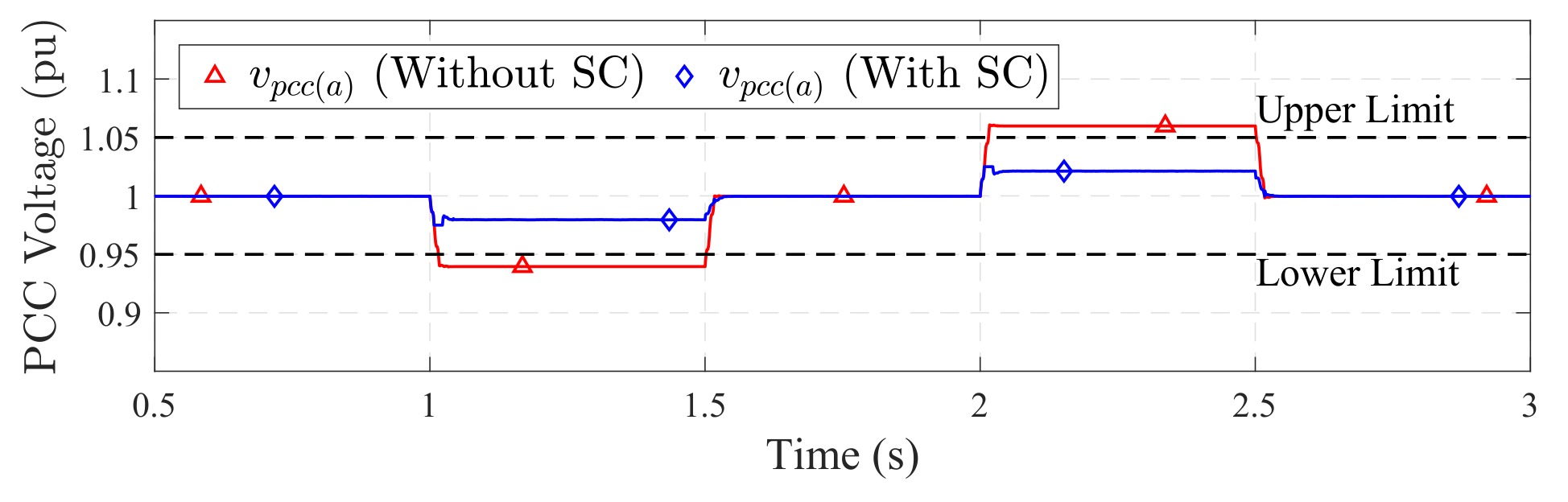
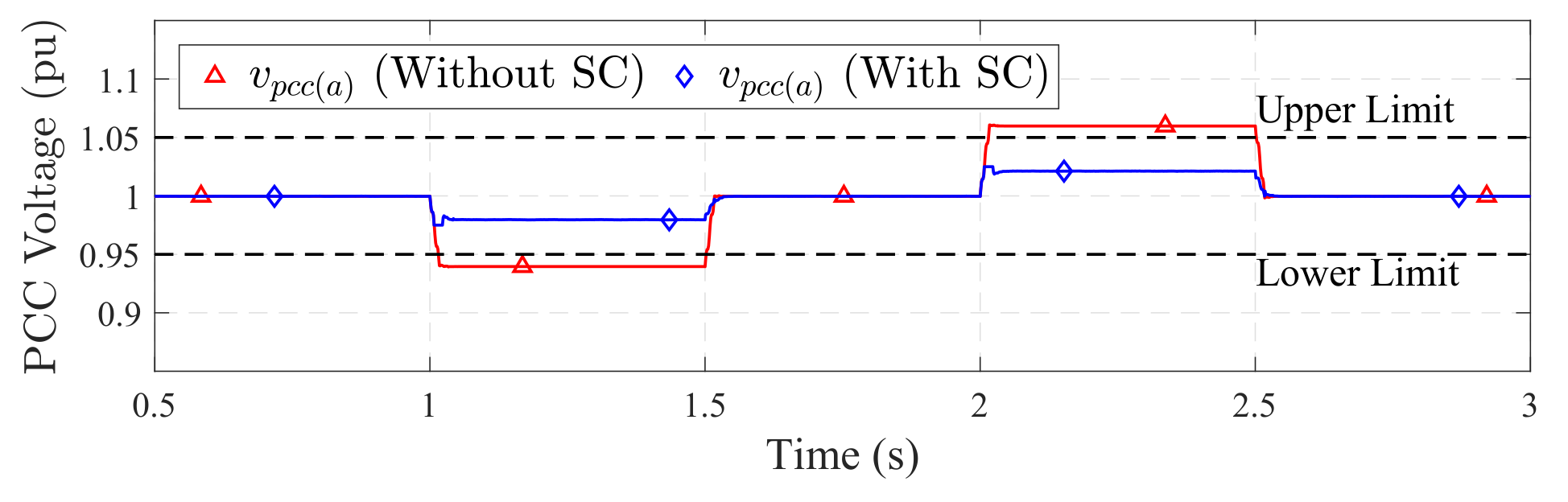
6.3. Voltage Regulation
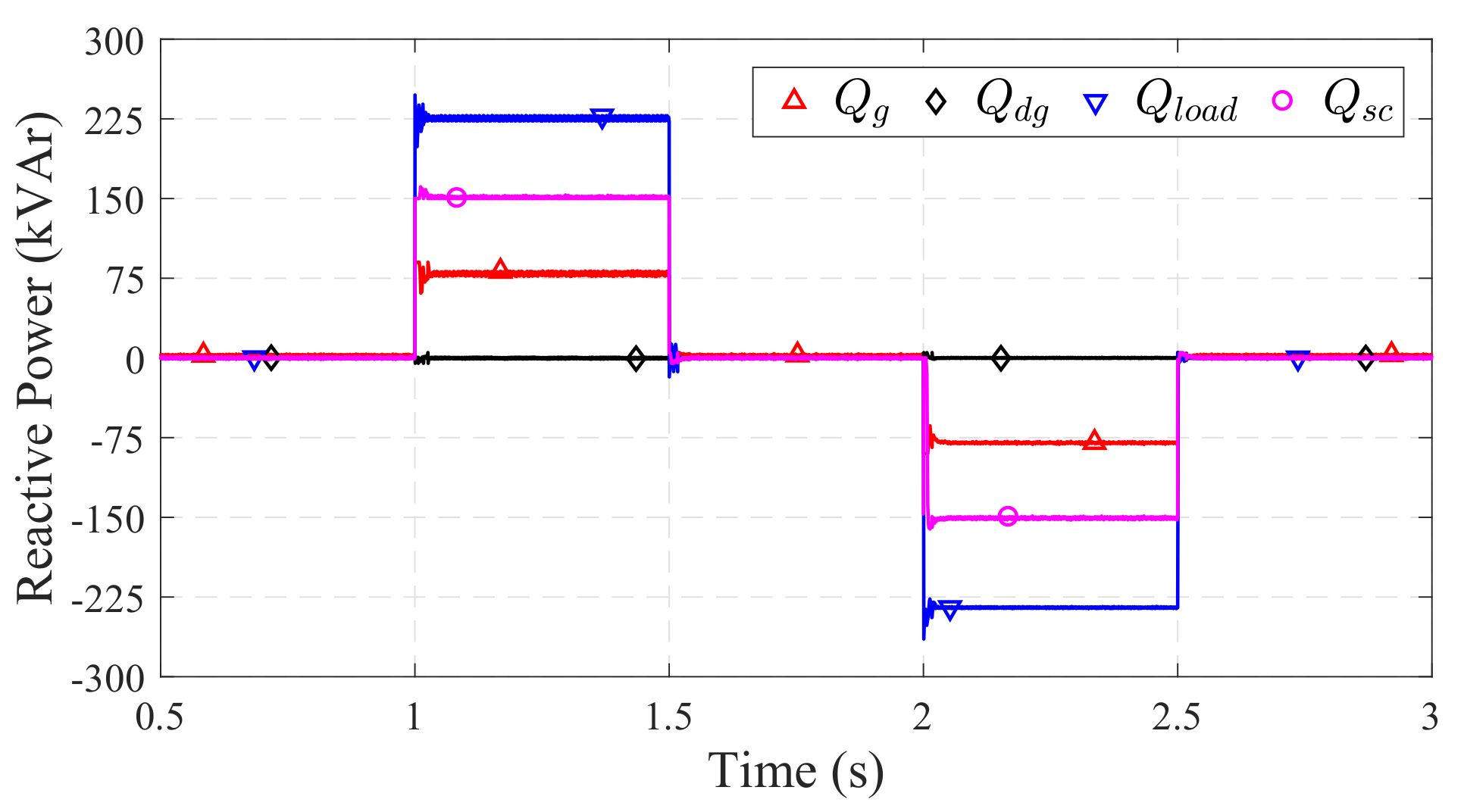
6.4. Four-Quadrant Operation
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ehsani, M.; Falahi, M.; Lotfifard, S. Vehicle to Grid Services: Potential and Applications. Energies 2012, 5, 4076–4090. [Google Scholar] [CrossRef]
- De Carne, G.; Zou, Z.; Buticchi, G.; Liserre, M.; Vournas, C. Overload Control in Smart Transformer-Fed Grid. Appl. Sci. 2017, 7, 208. [Google Scholar] [CrossRef]
- Traube, J.; Lu, F.; Maksimovic, D.; Mossoba, J.; Kromer, M.; Faill, P.; Katz, S.; Borowy, B.; Nichols, S.; Casey, L. Mitigation of Solar Irradiance Intermittency in Photovoltaic Power Systems With Integrated Electric-Vehicle Charging Functionality. IEEE Trans. Power Electron. 2013, 28, 3058–3067. [Google Scholar] [CrossRef]
- Järvelä, M.; Valkealahti, S. Ideal Operation of a Photovoltaic Power Plant Equipped with an Energy Storage System on Electricity Market. Appl. Sci. 2017, 7, 749. [Google Scholar] [CrossRef]
- Shivashankar, S.; Mekhilef, S.; Mokhlis, H.; Karimi, M. Mitigating methods of power fluctuation of photovoltaic (PV) sources—A review. Renew. Sustain. Energy Rev. 2016, 59, 1170–1184. [Google Scholar] [CrossRef]
- Wang, T.; Kamath, H.; Willard, S. Control and Optimization of Grid-Tied Photovoltaic Storage Systems Using Model Predictive Control. IEEE Trans. Smart Grid 2014, 5, 1010–1017. [Google Scholar] [CrossRef]
- Haider, Z.M.; Mehmood, K.K.; Rafique, M.K.; Khan, S.U.; Lee, S.J.; Kim, C.H. Water-filling algorithm based approach for management of responsive residential loads. J. Mod. Power Syst. Clean Energy 2018, 6, 118–131. [Google Scholar] [CrossRef]
- Falahi, M.; Chou, H.M.; Ehsani, M.; Xie, L.; Butler-Purry, K.L. Potential Power Quality Benefits of Electric Vehicles. IEEE Trans. Sustain. Energy 2013, 4, 1016–1023. [Google Scholar]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. Effective Utilization of Available PEV Battery Capacity for Mitigation of Solar PV Impact and Grid Support With Integrated V2G Functionality. IEEE Trans. Smart Grid 2016, 7, 1562–1571. [Google Scholar] [CrossRef]
- Gao, S.; Chau, K.T.; Liu, C.; Wu, D.; Chan, C.C. Integrated Energy Management of Plug-in Electric Vehicles in Power Grid With Renewables. IEEE Trans. Veh. Technol. 2014, 63, 3019–3027. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Arancibia, A.; Strunz, K.; Mancilla-David, F. A Unified Single- and Three-Phase Control for Grid Connected Electric Vehicles. IEEE Trans. Smart Grid 2013, 4, 1780–1790. [Google Scholar] [CrossRef]
- Kesler, M.; Kisacikoglu, M.C.; Tolbert, L.M. Vehicle-to-Grid Reactive Power Operation Using Plug-In Electric Vehicle Bidirectional Offboard Charger. IEEE Trans. Ind. Electron. 2014, 61, 6778–6784. [Google Scholar] [CrossRef]
- Sampaio, L.P.; de Brito, M.A.; de A. e Melo, G.; Canesin, C.A. Grid-tie three-phase inverter with active power injection and reactive power compensation. Renew. Energy 2016, 85, 854–864. [Google Scholar] [CrossRef]
- Li, S.; Bao, K.; Fu, X.; Zheng, H. Energy Management and Control of Electric Vehicle Charging Stations. Electric Power Compon. Syst. 2014, 42, 339–347. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. Bi-directional electric vehicle fast charging station with novel reactive power compensation for voltage regulation. Int. J. Electr. Power Energy Syst. 2015, 64, 300–310. [Google Scholar] [CrossRef]
- Arancibia, A.; Strunz, K. Modeling of an electric vehicle charging station for fast DC charging. In Proceedings of the 2012 IEEE International Electric Vehicle Conference (IEVC), Greenville, SC, USA, 4–8 March 2012; pp. 1–6. [Google Scholar]
- Kisacikoglu, M.C.; Kesler, M.; Tolbert, L.M. Single-Phase On-Board Bidirectional PEV Charger for V2G Reactive Power Operation. IEEE Trans. Smart Grid 2015, 6, 767–775. [Google Scholar] [CrossRef]
- Choi, W.; Lee, W.; Sarlioglu, B. Reactive power control of grid-connected inverter in vehicle-to-grid application for voltage regulation. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 26–29 June 2016; pp. 1–7. [Google Scholar]
- Sayed, K.; Gabbar, H.A. Electric Vehicle to Power Grid Integration Using Three-Phase Three-Level AC/DC Converter and PI-Fuzzy Controller. Energies 2016, 9, 532. [Google Scholar] [CrossRef]
- Xu, Z.; Hu, Z.; Song, Y.; Zhao, W.; Zhang, Y. Coordination of PEVs charging across multiple aggregators. Appl. Energy 2014, 136, 582–589. [Google Scholar] [CrossRef]
- Jhala, K.; Natarajan, B.; Pahwa, A.; Erickson, L. Coordinated Electric Vehicle Charging for Commercial Parking Lot with Renewable Energy Sources. Electr. Power Compon. Syst. 2017, 45, 344–353. [Google Scholar] [CrossRef]
- Zheng, J.; Wang, X.; Men, K.; Zhu, C.; Zhu, S. Aggregation Model-Based Optimization for Electric Vehicle Charging Strategy. IEEE Trans. Smart Grid 2013, 4, 1058–1066. [Google Scholar] [CrossRef]
- Lee, S.J.; Kim, J.H.; Kim, C.H.; Kim, S.K.; Kim, E.S.; Kim, D.U.; Mehmood, K.K.; Khan, S.U. Coordinated Control Algorithm for Distributed Battery Energy Storage Systems for Mitigating Voltage and Frequency Deviations. IEEE Trans. Smart Grid 2016, 7, 1713–1722. [Google Scholar] [CrossRef]
- Prikler, L.; Høidalen, H.K. ATPDRAW version 5.6 for Windows 9x/NT/2000/XP/Vista. Available online: http://www.elkraft.ntnu.no/atpdraw/ATPDMan56.pdf (accessed on 2 February 2016).
- Ipakchi, A.; Albuyeh, F. Grid of the future. IEEE Power Energy Mag. 2009, 7, 52–62. [Google Scholar] [CrossRef]
- Chiradeja, P.; Ramakumar, R. An approach to quantify the technical benefits of distributed generation. IEEE Trans. Energy Convers. 2004, 19, 764–773. [Google Scholar] [CrossRef]
- Alanne, K.; Saari, A. Distributed energy generation and sustainable development. Renew. Sustain. Energy Rev. 2006, 10, 539–558. [Google Scholar] [CrossRef]
- Hung, D.Q.; Mithulananthan, N.; Bansal, R.C. Analytical Expressions for DG Allocation in Primary Distribution Networks. IEEE Trans. Energy Convers. 2010, 25, 814–820. [Google Scholar] [CrossRef]
- Mehmood, K.K.; Khan, S.U.; Lee, S.J.; Haider, Z.M.; Rafique, M.K.; Kim, C.H. Optimal sizing and allocation of battery energy storage systems with wind and solar power DGs in a distribution network for voltage regulation considering the lifespan of batteries. IET Renew. Power Gener. 2017, 11, 1305–1315. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; Vasquez, J.C.; Alarcon-Gallo, E. Flexible Voltage Support Control for Three-Phase Distributed Generation Inverters Under Grid Fault. IEEE Trans. Ind. Electron. 2013, 60, 1429–1441. [Google Scholar] [CrossRef]
- Kisacikoglu, M.C.; Ozpineci, B.; Tolbert, L.M. EV/PHEV Bidirectional Charger Assessment for V2G Reactive Power Operation. IEEE Trans. Power Electron. 2013, 28, 5717–5727. [Google Scholar] [CrossRef]
- Daud, M.Z.; Mohamed, A.; Wanik, M.Z.C.; Hannan, M.A. Performance evaluation of grid-connected photovoltaic system with battery energy storage. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 337–342. [Google Scholar]
- Nguyen, T.H.; Lee, D.C. Ride-Through Technique for PMSG Wind Turbines using Energy Storage Systems. J. Power Electron. 2010, 10, 733–738. [Google Scholar] [CrossRef]
- Ge, B.; Wang, W.; Bi, D.; Rogers, C.B.; Peng, F.Z.; de Almeida, A.T.; Abu-Rub, H. Energy storage system-based power control for grid-connected wind power farm. Int. J. Electr. Power Energy Syst. 2013, 44, 115–122. [Google Scholar] [CrossRef]
- Nissan. 2015 LEAF—First Responder’s Guide. Available online: https://www.nissan-techinfo.com/refgh0v/og/FRG/2015-Nissan-LEAF-FRG.pdf (accessed on 27 May 2017).
- Nissan. 2015 LEAF—Owner’s Manual. Available online: https://www.nissan.ca/content/dam/nissan/ca/owners/manuals/LEAF/2015-Nissan-LEAF.pdf (accessed on 17 October 2017).
- Automotive Energy Supply Corporation. Available online: http://www.eco-aesc-lb.com/en/product/liionev/ (accessed on 16 May 2017).
- AVIC Automotive Korea. Available online: http://www.avickorea.com (accessed on 1 July 2017).
- Tremblay, O.; Dessaint, L.A. Experimental Validation of a Battery Dynamic Model for EV Applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar]
- SAE International. SAE Electric Vehicle and Plug in Hybrid Electric Vehicle Conductive Charge Coupler; SAE J 1772; SAE International: Warrendale, PA, USA, 2016; pp. 1–110. [Google Scholar]
- Erickson, R.; Maksimovic, D. Fundamentals of Power Electronics; Springer: New York, NY, USA, 2007. [Google Scholar]
- Reznik, A.; Simões, M.G.; Al-Durra, A.; Muyeen, S.M. LCL Filter Design and Performance Analysis for Grid-Interconnected Systems. IEEE Trans. Ind. Appl. 2014, 50, 1225–1232. [Google Scholar] [CrossRef]
- Arias, M.B.; Bae, S. Electric vehicle charging demand forecasting model based on big data technologies. Appl. Energy 2016, 183, 327–339. [Google Scholar] [CrossRef]
- Ercan, T.; Noori, M.; Zhao, Y.; Tatari, O. On the Front Lines of a Sustainable Transportation Fleet: Applications of Vehicle-to-Grid Technology for Transit and School Buses. Energies 2016, 9, 230. [Google Scholar] [CrossRef]
- Noel, L.; McCormack, R. A cost benefit analysis of a V2G-capable electric school bus compared to a traditional diesel school bus. Appl. Energy 2014, 126, 246–255. [Google Scholar] [CrossRef]
- Wu, Q.; Nielsen, A.H.; stergaard, J.; Cha, S.T.; Marra, F.; Andersen, P.B. Modeling of Electric Vehicles (EVs) for EV Grid Integration Study. In European Conference SmartGrids & E-Mobility; Ostbayerisches Technologie-Transfer-Institut: Regensburg, Germany, 2010. [Google Scholar]
- IEEE Application Guide for IEEE Std 1547(TM). IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE Std 1547.2-2008; IEEE: Piscataway, NJ, USA, 2009; pp. 1–217. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | EV Name | Vehicle Type | Battery Pack (kWh) | Range (km) |
|---|---|---|---|---|
| Nissan LEAF [36,37,38] | Car | 23.4 [65 Ah, 360 V] | 134 | |
| ENVYON [39] | Bus | 100.8 [160 Ah, 630 V] | 160 * |
| Parameters | Nissan LEAF | ENVYON |
|---|---|---|
| (V) | 390.37 | 683.15 |
| K | 0.04 | 0.03 |
| (Ah) | 65 | 160 |
| A (V) | 30.23 | 52.91 |
| B (Ah) | 0.93 | 0.38 |
| 0.06 | 0.04 |
| Entity | Parameter | Value |
|---|---|---|
| Grid | 380 V | |
| 60 Hz | ||
| 0.1 mH | ||
| Renewable energy DG | 150 kW | |
| ±50% | ||
DC-DC converter | 360 V | |
| 22.42 mH | ||
| 37.62 F | ||
| 6000 Hz | ||
DC-DC converter | 630 V | |
| 3.28 mH | ||
| 52.91 F | ||
| 6000 Hz | ||
| Grid side inverter | 150 kVA | |
| 700 V | ||
| 2551.02 F | ||
| 0.603 mH | ||
| 0.015 mH | ||
| 275.545 F | ||
| 0.078 Ohm | ||
| 6000 Hz |
| Methodology | Vehicle | V2G | G2V | Initial SoC | Final SoC | Utilization Factor |
|---|---|---|---|---|---|---|
| (RM) Battery capacity-based power allocation method [24] | Yes | No | 75% | 44% | 75% | |
| Yes | Yes | 50% | 57% | |||
| (PM) Proposed proportional power allocation method | Yes | Yes | 75% | 60% | 100% | |
| Yes | Yes | 50% | 53% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, S.U.; Mehmood, K.K.; Haider, Z.M.; Bukhari, S.B.A.; Lee, S.-J.; Rafique, M.K.; Kim, C.-H. Energy Management Scheme for an EV Smart Charger V2G/G2V Application with an EV Power Allocation Technique and Voltage Regulation. Appl. Sci. 2018, 8, 648. https://doi.org/10.3390/app8040648
Khan SU, Mehmood KK, Haider ZM, Bukhari SBA, Lee S-J, Rafique MK, Kim C-H. Energy Management Scheme for an EV Smart Charger V2G/G2V Application with an EV Power Allocation Technique and Voltage Regulation. Applied Sciences. 2018; 8(4):648. https://doi.org/10.3390/app8040648
Chicago/Turabian StyleKhan, Saad Ullah, Khawaja Khalid Mehmood, Zunaib Maqsood Haider, Syed Basit Ali Bukhari, Soon-Jeong Lee, Muhammad Kashif Rafique, and Chul-Hwan Kim. 2018. "Energy Management Scheme for an EV Smart Charger V2G/G2V Application with an EV Power Allocation Technique and Voltage Regulation" Applied Sciences 8, no. 4: 648. https://doi.org/10.3390/app8040648