An Overview of Novel Actuators for Soft Robotics


1
Mechanics and Maritime Sciences Department, Chalmers University of Technology, 41296 Gothenburg, Sweden
2
Mechanical Engineering Department, Istanbul Technical University, Istanbul 34437, Turkey
3
Institut fur Montagetechnik (match), Leibniz Universität Hannover, 30823 Garbsen, Hannover, Germany
*
Author to whom correspondence should be addressed.
Actuators 2018, 7(3), 48; https://doi.org/10.3390/act7030048
Submission received: 10 June 2018
/
Revised: 24 July 2018
/
Accepted: 9 August 2018
/
Published: 16 August 2018
(This article belongs to the Special Issue Robotic Actuators)
Abstract
:In this systematic survey, an overview of non-conventional actuators particularly used in soft-robotics is presented. The review is performed by using well-defined performance criteria with a direction to identify the exemplary and potential applications. In addition to this, initial guidelines to compare the performance and applicability of these novel actuators are provided. The meta-analysis is restricted to five main types of actuators: shape memory alloys (SMAs), fluidic elastomer actuators (FEAs), shape morphing polymers (SMPs), dielectric electro-activated polymers (DEAPs), and magnetic/electro-magnetic actuators (E/MAs). In exploring and comparing the capabilities of these actuators, the focus was on eight different aspects: compliance, topology-geometry, scalability-complexity, energy efficiency, operation range, modality, controllability, and technological readiness level (TRL). The overview presented here provides a state-of-the-art summary of the advancements and can help researchers to select the most convenient soft actuators using the comprehensive comparison of the suggested quantitative and qualitative criteria.
1. Introduction
In this overview, it is intended to give a broad evaluation of the developments in soft-actuators. These alternative devices either fundamentally differ from the traditional actuators which normally use electro-magneto-mechanical, fluidic, and thermal combustion, or they have the same operation principles under a completely new design, emphasizing crucial differences in soft-robotics. One of the road-blocks in front of designing and realizing efficient and robust yet safer robotic structures is the inherent limitations in the traditional actuation. For example, in robots with serial kinematic chains, the joint closest to the base should be able to cope with all the weight and counter torque requirements of the preceding joints. This requires the base motor to be selected as large as possible, making the robot hefty in turn. In other words, the ratio between the energy supplied by the actuator and the weight of the actuator is a natural limitation. Even this basic fact was a set-back until harmonic drive and light-weight structures offered an intermediate and acceptable solution to the robotics community. In addition to energy output/weight, the volumes occupied by the traditional actuators in the robot structure cause the packaging problem. Therefore “energy output/volume” ratio is also an inherent limit in selecting the best actuator for a given application. Considering these two general criteria, the novel/soft actuators can give the researchers the opportunity to design compact, light-weight and compliant soft-robots. In the soft robotics field, two recent reviews have been performed one concentrating on design, fabrication, and control of soft robots [1], and the other on soft materials used in soft robotics [2]. However, there is no comprehensive review on the novel actuators mapping their properties to possible applications and especially regarding them in a multi-criteria evaluation as presented here. Therefore, in this review, we provide a comprehensive evaluation of the current state-of-art in soft-actuators, focusing on four different type of actuators.
2. Systematical Review Method
A systematical review of current developments in soft/novel actuators is needed including the performance comparison and application-specific selection criteria. Here, we provide eight criteria for five different actuator types namely shape-memory alloys (SMAs), fluidic elastomer actuators (FEAs), shape memory polymers (SMPs), dielectric/electrically-actuated polymers (DEAPs) and electro-magnetic/magnetic actuators (E/MAs). A special importance is given to seven selection criteria, including the aspect of compliance, topology-geometry, scalability, energy efficiency, operation range, modality, controllability and technological readiness level.
To illustrate a systematical evaluation of a soft actuator with the perspective in this review, we can examine FEA-type actuators as an example case. There can be many sub-groups of actuators under the FEA-type such as “soft pneumatic actuators” (SPAs) [3] and “flexible-fluidic actuators” (FFAs) [4]. The FEA type actuators can be pre-programmed by arranging their extensible and inextensible parts in a specific geometry to determine the bending and the orientation of movement in a specific way. Therefore, in terms of design, they are topologically programmable. From the mechanical compliance aspect (Section 2.1), these devices are inherently compliant; however, their structural stiffness can change greatly depending on the internal pressure [3]. The optimal topology and geometry (Section 2.2) also play important roles in the efficiency of harnessing the full capacity of the generated power in the actuator. For the FEA-type actuators, especially the chamber geometry and the connection patterns are important since the pressure build-up regions and the orientation of the actuation is programmed by this structural parameter. The FEA-type actuators are highly scalable and less complex to produce (Section 2.3) while the energy efficiency (Section 2.4) depends on the fluid used in the system. The operation range (Section 2.5) of FEA-type soft actuators are determined by the internal pressure and the environmental settings such as temperature. The pneumatic or hydraulic operation principles can be selected as FEA modality (Section 2.6) to come up with new devices. The applications can range from medical to industrial robotics where inherent compliance and adjustable stiffness is needed. For example, characteristics such as back-drivability and the off-axes deformation capability make FEA safe for human–robot interaction [5]. In terms of controllability (Section 2.7), the liquid-based devices can exhibit more linear behavior than their counterparts using the pneumatic principles. Although the device is highly non-linear, control of such devices can be relatively easy employing simple on/off control. Lastly, because of the easy manufacturing, FEA-type soft actuators can score high in technological readiness level (Section 2.8) as the researchers were already exploring their potential in laboratory conditions for many years and they have been used in advanced robotics prototypes.
A summary for this systematical evaluation in the above paragraph is given in Table 1 to illustrate the review approach of this paper for a selected actuator type (i.e., FEA/SPA) to provide the readers an organized setting for overview and extracting relevant information. Tables including all the actuator types is given in Section 3, detailing use-cases for completeness.
In the rest of the review, each selection criterion is expanded across all the soft-actuator types for the sake of brevity, producing a comparison across the actuator types for the criterion in focus. In the conclusion section, comparing the four types of actuators according to seven criteria to emphasize the strengths and weaknesses, a list of hybrid solutions is suggested. This table of hybrid solutions is expected to guide the robotic researchers in selection of the actuator type according to their applied field as well as clarifying which one of these actuator types could be used together for a hybrid-actuation solution.
2.1. Mechanical Compliance
With the modern setting of industrial production lines and concepts of smart factory and Industry 4.0, the robots used in industry are required to be modular, adaptable, compliant, and light-weight. In addition, mobile robotics has also moved towards being more compliant and light-weight but robust structures. Another field of robotics where compliance might be crucial is for medical/surgical applications.
The need for compliance is imposed by the human–robot co-operation and interaction scenarios. For example, in industrial robotics a human–robot co-operative team should be able to work together without the danger of robot partners harming humans due to collisions in the task trajectory. Therefore, the industrial robot arm should be inherently compliant, yielding the force control to the human partner in the task when necessary. A similar necessity is brought in minimally invasive robotic catheters where variable stiffness and compliance is desired while passing through torturous channels in human body to prevent tissue damage or rupture.
For some soft-actuators, the compliance can be inherent because of the material used. Although difficult, the compliant behavior can be also modeled and numerically represented. The compliance and the mechanical behavior for DEAP (Dielectric- Electrically Actuated Polymers) type materials was modeled using the Timoshenko beam approach [9]. The general material used in lab-based DEAP was acrylic-based VHB and the normalized Young’s modulus for this material was 210 kPa [10]. If the elastomeric dielectric polymers were used, the Young’s modulus could be around 1 MPa while the material could sustain 380% strain in high electric fields [11]. In a non-traditional approach, a novel actuator for soft-robotics using discrete actuation units to form a muscle-like structure uses the compliance as the enabler for discretization of the muscle units [12]. Another polymer group that are used in SMP structures also have attractive properties in terms of high deformation capacity [13].
To make the compliance of the structure adjustable and more independent from the selected materials, a hybrid-actuator can be used following the approach in STIFF-FLOP [14], leading to controllable-stiffness.
The compliance of E/MA type of structures are mainly dependent on the substrate material that is used as continuum media for ferro-magnetic particles [15] or as a substrate to cover stretchable coils [16]. To the best knowledge of the authors, there are no studies demonstrating the effect of ferro-magnetic particles or electromagnetic-coils on the overall compliance of the polymeric structure. It can be projected that the addition of solid particles will reduce the compliancy; however, experimental evidences are necessary to show the extent of the effect and perhaps mitigate its results on compliance. The compliance criterion was examined across all the actuator types and summarized in Table 2.
2.2. Optimal Geometry
In most of the actuator designs, even in the traditional motor design, the geometry and topology of the actuator must be optimized to achieve the best energy efficiency, compactness, and the most available stable force/torque from the structure. Even in traditional DC (Direct Current) motor design the stator/rotor geometry and the air gap between windings are optimized for the best flow of the magnetic field curves. For the novel actuators, the topology and finding the optimal geometry for the specific task is indispensable since it directly effects either the force or the stroke capability or both.
In this section we will overview the effect of topology/geometry in SMA, FEA, SMP, DEAP, and E/MA based designs. However, to obtain a comparable base between different actuator modalities we will first describe the main topological features in these actuators which has a definitive effect on the force or stroke amounts.
2.2.1. Optimal Geometry in SMA
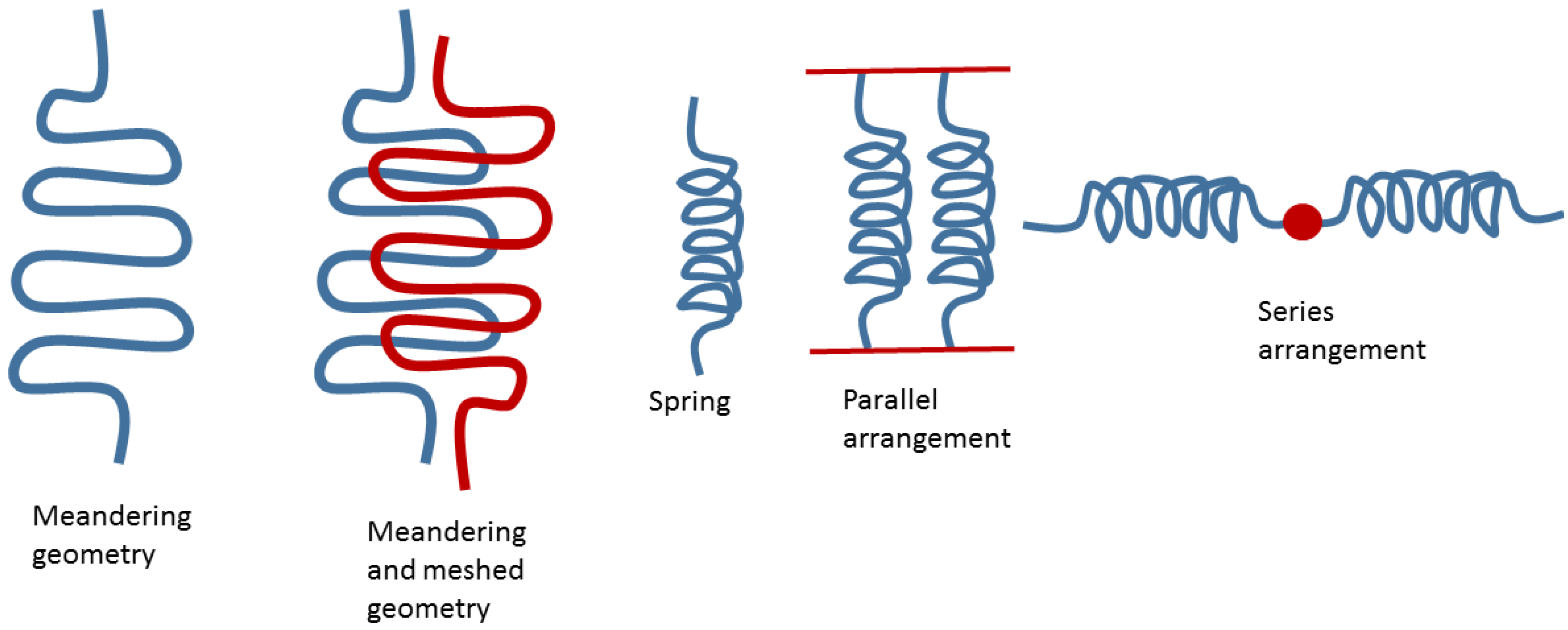
There are very few studies focusing on the effect of topology/geometry of the actuator on the overall actuator performance. Among the possible geometries, the spring coil is examined [21] including four design parameters, namely wire diameter, the rod diameter, the pitch angle, and the number of active coils. The peculiar contribution of this work was in its consideration for the de-twinning phenomenon in shape memory effect together with the geometrical variables. Therefore, the effect of the geometrical design was used efficiently to demonstrate that based on the spring index, a deformation up to 200–1600% was possible. Using the carefully designed geometry, a two-way antagonistic actuation can also be achieved [22] using simple wire-form SMA elements. This type of design also requires kinematic considerations in addition to basic material properties.
Although overlooked in the previous studies, in addition to these obvious geometrical options (i.e., antagonistic couple and spring), meandering shapes on wires, inter-woven wire-meshes, and parallel/series assemblies of SMA spring-coils can be examined to further explore the potential of geometrical/topological optimization on actuation performance (see Figure 1).
2.2.2. Optimal Geometry in FEA.
Here the effective variables can be listed as the air/fluid chamber geometry and distribution, wall thickness, double polymer designs (to restrict the movement at particular direction), elastomeric fibers, and their frequency/angle on the fluidic chambers. As in all other actuator types, the application determines the manipulator geometry and the suitable material; however, here the specific emphasis is on the internal pressure and range of motion. In Reference [23], finite element analysis is used to simulate the range of motion and hyper-elastic response of the two different types of silicone. There, it clearly was indicated that different geometrical ratios and channel designs have affected the generated stress in the structure therefore causing a certain bending angles. The application was found to be appropriate in laparoscopic surgery due to internal tubing and volumetric allowance. Analytical models were also used in Reference [24] to capture the explicit relationship between input pressure, bending angle, and output force with special emphasis on the actuator geometry.
Another significant example of how the effective use of topology and geometry made it possible to build a macro-scale soft robot can be found in Reference [25], (p. 1). This soft robot is a 0.65 m long, untethered structure able to support the miniature air compressors, battery, valves, and controller on itself. The structure was able to operate because of the specific arrangement of the hollow glass spheres. Again, in order to increase the interaction area in the layer-by-layer process and prevent tear, a peg-hole geometry was used.
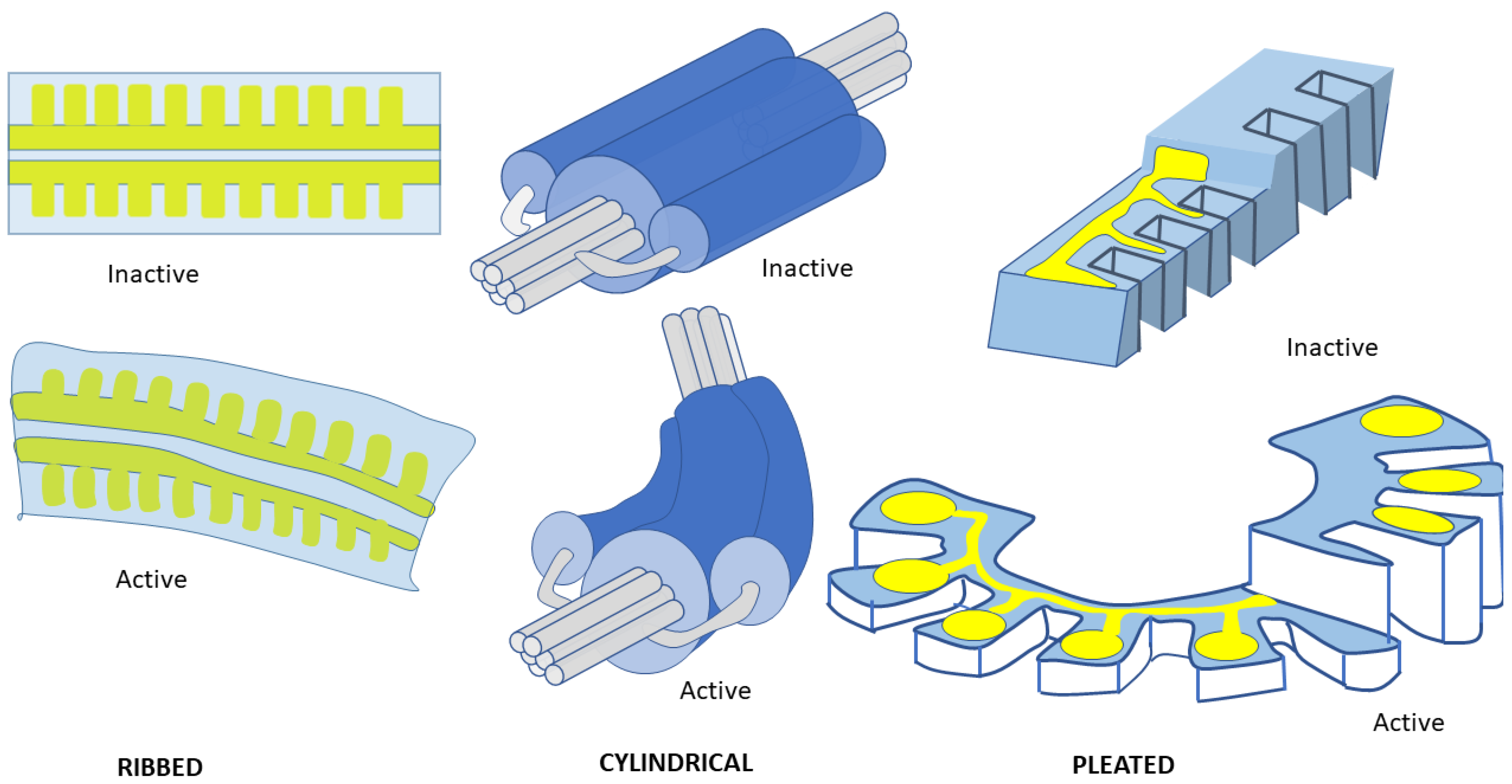
In an interesting work [26], (p. 2164) using topology/geometry to enhance the response of the device fast-pneu-nets (fPN) was proposed. In contrast to previous and slower motion, the extensible layer of fPN contains gaps between the inside walls of each chamber. The dimensions of chambers here are designed in such a way to have thinner inner walls and a greater surface area compared to the outer walls. The chamber size and their morphological arrangement in FEA-FFA design was also examined in Reference [7]. Although some numerical and experimental comparisons between ribbed, cylindrical, and pleated geometries exist, a systematical and comprehensive analysis on the effects of chamber size, distribution, and morphology is still missing in the research field. Different geometries in their neutral and inflated states are suggested for FEA to enhance the response time, operation range, and controllability, as shown in Figure 2.
2.2.3. Optimal Geometry in SMP
Here the coiling parameter, the self-coiling vs. mandrel coiling, chirality, the number of strands, and braid patterns in the structure are important. A particular type of soft actuator derived from fishing-line or sewing-thread uses thermo-mechanical actuation principles, and can be considered in the SMP category. In these actuators, the over-twisting and coiling was used before the heat treatment was applied. The geometry is extremely important because inserting the twist can introduce instability. To counter-balance this a counter-balancing braiding structure should be designed [27]. Perhaps one of the most interesting application ideas employing the topological/geometrical optimization is to consider vascularized structures made out of SMP materials using additive manufacturing [28].
2.2.4. Optimal Geometry in DEAP
The ratio of elastic band/electrode area, the pre-stretching of the polymer (elastic strain), piling/stacking of the material. One of the very early works reporting on electro-active polymers has suggested a two-way working and tubular geometry [29]. A recurring idea to produce useful actuators from DEAP is to use stacking, folding [30,31], or rolling the elastomer/polymer to increase either the force or the stroke as the main output of the actuator. A rolled elastomer design reported in References [32,33] was able to bend in many directions, therefore presenting a good candidate for surgical or mobile robotics use. Another common approach to manipulate the surface deformation in DEAPs to harvest the stroke/force in the desired orientation is to use fiber strands in various geometrical lay-outs [34]. These fiber surfaces can be arranged in micro-scale and the diamond shape areas can be customized to obtain the better result in actuation output using the angle between intersecting fibers [10].
2.2.5. Optimal Geometry in E/MA
The example studies on E/MA function [15,16,35] does not openly discuss the optimal geometrical design of soft E/MA robotic structures. However, this is decided on use-case of the actuator. Since this type of actuators usually need an external unit regulating the applied magnetic field, the geometry could be also dependent on the regulation device. Most of the use-cases for E/MAs is related with millimetric-scale biomedical use-cases, therefore the geometry is usually in membrane or sheet form. Morphological design parameters in E/MA types of soft actuators have not been fully explored, yet it can provide a new venue for exciting research.
2.3. Scalability and Complexity
A challenging problem in robotic design is the increasing complexity of the actuator as it is produced in larger or smaller scales. In order to better understand this problem and probe into certain limitations, herein the scalability and complexity of each selected actuator type are examined. The scalability can be limited by current manufacturing and assembly methods as well as physical limitations of the modality of the actuator (i.e., saturation, non-linear operation, uncertainty, deterioration of the physical phenomena at a particular scale).
2.3.1. Scalability of SMAs
Although the studies on SMAs as actuators do not particularly focus on scalability and complexity issues, some applications may be singled out to provide a leading idea on the scalability. One case [36] studied the feasibility of the production of micro-scale structures using the micro-pulling growth technique to obtain thin wires of SMA involving single crystals. This ability of producing single-crystals in micro-scale allowed them to overcome the brittleness of SMA structures when they are produced in small-scales using a poly-crystal inner structure. In their work involving the design of a torsional actuator based on SMAs, Reference [37] used a meso-scale antagonistic structure for bilateral functionality. Despite the disadvantage of difficult heat-transfer at the macro-scale, SMA structures as passive super-elastic units in seismic applications is possible as seen in Reference [38].
2.3.2. Scalability of FEAs
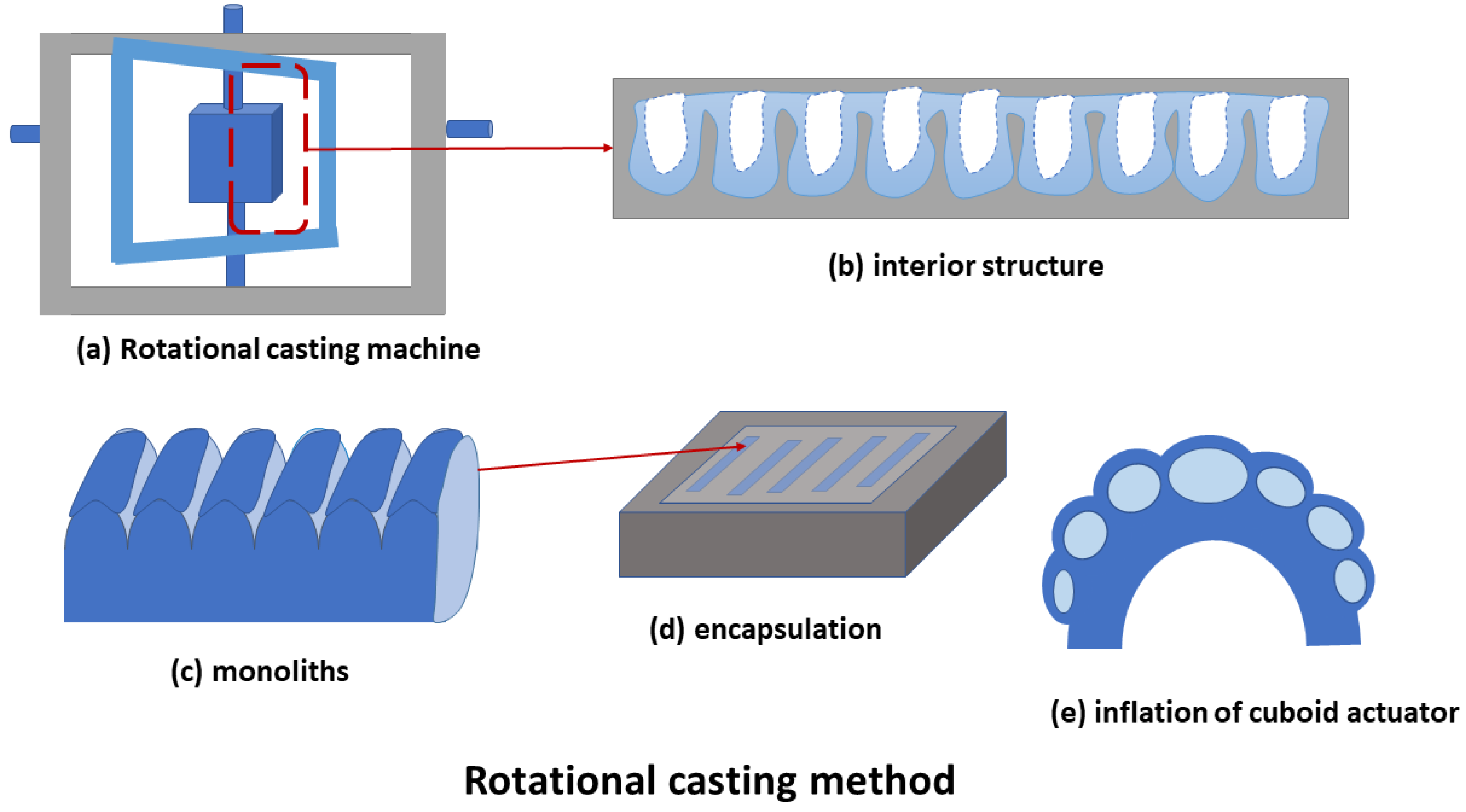
We can see from the work in Reference [25] that the soft lithography is a scalable molding process. In that work, they used this method to produce a robot with lengths of 15 and 65 cm. Although the manufacturing is scalable without much effort, the operation of the robot does not follow the same trend. The macro-size robot actuated by FEA should use a reduced density material or the actuation pressure should be increased to counter-balance its own weight. In addition to layer-by-layer soft-lithography method, better continuous soft actuators can be molded by a spin production process which is highly scalable [39] to produce monolithic soft-machines. In this scalable casting process, they could control more parameters compared to basic layering such as: (i) viscosity evolution during casting, (ii) rotational speed of the primary axis, (iii) axial speed ratio of the machine, and (iv) the internal surface geometry of the two-part molds. This scalable monolithic casting process can be seen in Figure 3.
The soft robots actuated by FEAs can be assumed to be much simpler than the mechanical ones, since they may be operated without an internal or external skeleton. Although the structural complexity might be low, complex locomotion patterns are possible such as ones including the change in gait [3] (p. 4). A limiting factor for such actuators could be related to the power supply for FEAs. Most fluidic actuators include compressors and bulky supply lines, increasing their complexity level [40] (p. 484).
2.3.3. Scalability of SMP.
In the vascularized SMP blocks, the scalability was determined to be one of the limiting factors [19]. Since SMP structures can usually be actuated only in one direction, to eliminate this, a composite containing SMPs and SMAs was manufactured in Reference [41]. Here the structure was more functional and scalable since the two-way actuation was achieved by the SMA embedded in SMP and the actuation load was not on SMP. Another scalable format for SMPs is to use fiber or yarn based structures [42].
2.3.4. Scalability of DEAPs
2.3.5. Scalability of E/MAs
As soft E/MA type devices are very recent, the scalability of them is not widely examined. However, it could be inferred from the current research that the most convenient scale for the functional robotic prototypes could be at the millimeter level [15,16,35]. In Reference [35], theoretical models for scaling is built and for the sheet-shaped robot, they report difficulty in creating robots that have h < 40 µm and w < 0.3 mm. However, this inference from current literature should be taken with a caution as the soft E/MA is novel and still ripe for exploration on the scalability. If the principles of external regulation can be managed in an energy-efficient manner and if the manufacturing is automated, meso- and macro-scale actuators might be possible.
2.4. Energy Efficiency
The possibility of optimization of the stroke or force obtained from the actuator versus its energetic efficiency is highly linked together in SMA-based actuators. In Reference [44], hollow helical springs based on SMAs were proposed to reduce the weight of the actuator and increase the efficiency of the heating–cooling cycle. This work keeps the geometrical advantage of the helical design in amplification of the stroke, but also reduces the loss of energetic efficiency by reducing the effective mass with the hollow-structure. In addition, the dimensionless units are employed for a better comparison between the hollow SMA springs and their solid counterparts, demonstrating a significant improvement. In terms of energy efficiency, the smaller the SMA structure, the better the energy conversion dynamics would be handled. An example of this behavior can be seen in SMA ultra-thin films [45]. The energy efficiency and work production is not frequently studied; however, for thermal cycles and work production of special SMAs they can be found on a case-by-case basis as in Reference [46].
In order to operate non-conventional actuators based on smart-materials, we often need to use amplification. In many cases, the energy transformation during actuation is from electrical energy to mechanical energy. For the case of SMPs, this transformation is thermo-mechanical and for FEAs hydro-mechanical/fluidic to mechanical domain. The need for the amplification and the nature of the energy domain change may bring problems related with efficiency. For this particular problem, we will compare our four selected actuators based on their need for amplification and energy conversion efficiency. It should be noted, although, that the actuator types with lower efficiencies cannot be considered completely insignificant based on this criterion because low-efficiency type actuators tend to provide compact actuation spaces which might serve as critical solutions especially for medical robotics.
The DEAP-based actuators are the most disadvantageous option among the soft actuators because of its need for high amplification of the voltage to obtain high electric fields [32]. The high-voltage requirement brings about extra problems such as electrical breakdown. In order to overcome this problem, the dielectric constant of the polymer can be improved by adding silica nanoparticles [47]. Although the amplification requirement and high voltage is a drawback, DEAP actuators can convert energy up to 0.4 J/g [48], which is larger than piezoelectric ceramics or electro-magnetic actuators. It has been reported that the electro-mechanical coupling is around 60–80% in acrylic and can go up to 90% for silicon based polymers [11].
For the SMPs, the amplification is not needed; however, the energy conversion efficiency during contraction is around 1.08–1.32% for nylon and polyethylene [27]. Another factor affecting the energy efficiency of SMP-based actuators is to change the environment of the heat conduction, such as using water instead of air [42].
FEA-based actuators can use topological optimization for amplification and their energy efficiency is comparably low because they operate below 0.5 MPa. The specific energy is particularly low in that pressure range; however, it can reach as high as 200 J/g when the pressure is around 5 MPa [49].
For E/MA type soft actuators, when an embedded stretchable coil is used in soft substrate, it is calculated in Reference [16], for current I = 1 A and resistance Rc = 0.9 Ω, the main power consumption per single actuator in vibration mode was 0.9 W. The energy conversion rate between the supplied energy and the mechanical work was around 0.03%. For the gripper type of their E/MA application they reported 0.0049% [16] (p. 8). If the ferromagnetic particles are printed on the soft materials as in Reference [15] (p. 278), it was reported that the power density could range between 22.3 kW/m3 and 309.3 kW/m3, which is the highest reported for untethered soft actuators.
2.5. Operation Range
2.5.1. Operation Range of SMAs
The maximum stroke of linear SMA wire actuators lies between 5% and 8% [50,51]. Higher strains can be achieved with coil springs made from SMA wire, which represents a trade-off between smaller forces and larger strokes. The operation range of the SMAs can be increased with material science engineering studies. Perhaps the most relevant operation range property of SMAs is multi-cycle performance. Certain types of SMAs are studied to identify their functional performance under multi-cyclic conditions such as the work in Reference [52].
2.5.2. Operation Range of FEAs
The FEA-based soft robots are manufactured using siloxanes and elastomers, and they are vulnerable when they meet sharp objects [3]. This property may limit their operation range in high-pressure applications. In a recent work [25], it was demonstrated that robots can be propelled by pneumatically powered soft actuators with untethered operation underwater, in-land performing rolling and serpentine movements. Some of these robots had rigid structural components and did not move in locomotion patterns requiring to work against the gravity. Another performance limitation also mentioned by Reference [25] is related to reaction time (100 ms), although the actuation itself is rapid because of the high pressure employed in this work (138 kPa).
In “pneu-net” structures, recently they reduced the amount of the gas needed for actuation, thus accelerating the actuation response [26]. In such structures, a simple actuator can bend from a linear to a quasi-circular shape in 50 ms when a pressure of 345 kPa is applied. In a normal operation scenario, pneu-nets ca be inflated with pressures as low as 50 kPa and they require a volumetric change of 20-folds of their initial volume to achieve their full range of bending. Unfortunately, this volumetric change may also be a disadvantage because of the need of certain workspace and the transfer of large volumes of gas is a thermodynamically inefficient process. In addition to this, because of the large strains on the material, the operating life-span of pneu-nets are rather short [26].
The robots with a silicone body are inherently resilient to adverse conditions such as cold weather, water exposure, direct exposure to the flames, and high impacts [25]. In the same category with FEAs, the pouch-motors proposed by Reference [53] and the measured maximum stroke was up to 28% obtaining 100 N. In that work, the researchers also demonstrated an easy way to manufacture printable soft-actuators.
2.5.3. Operation Range of DEAPs
A general operation requirement for elastomer based DEAPs is an electric field of 100 V/µm, however in some of the chemically tailored polymers this performance can be greatly improved. For example, in Reference [54] a new class of all-organic-field-type EAP composite was derived exhibiting high elastic energy densities that are induced by an electric field as low as 13 V/µm. In a study exploring the nonlinearity and time-varying properties of DEAP-based actuators [55], it was observed that DEAPs display linear dynamic response from approximately 1.5 to 3 kV, after this value a nonlinear actuation mode starts. In the application of DEAPs for underwater robots [56], it has been reported a maximum trust force of 0.15 N, which is relatively low for industrial robots, however meaningful for the under-water self-sufficient exploration robots. In Reference [43] using acrylic and gold particle-solution for stretchable electrodes, they were able to obtain 200 MV/m for a film thickness of 25 µm corresponding to 200 V/µm, applying 5 kV source of voltage. In Reference [33], rolled spring actuators based on DEAP were actuated using 5.9 kV for one side and a bending angle of 600 was achieved. The maximum lateral force obtained by this actuator was 1.68 N at 7.7 kV. For the repeated and safe operation, the actuator was operated at 6 kV obtaining 1.15 N. In order to obtain better performances, using electro-thermal and electro-strictive effects together with the enhanced electro-mechanical coupling, new composite research such as Reference [57] is needed. In that study, titanium oxide nanotubes and carbon nanotubes are used to enhance the properties of candidate membrane materials. Enhancement of polarization and reduction of the stiffness are two parameters in such polymer research to obtain better electromechanical properties. Another work focused on eliminating the need for rigid frames in membrane type actuators [58]. In that work, after curing a certain additive, force equilibrium between the polymeric networks was able to preserve part of the pre-stretch, therefore eliminating the need for external rigid frames. Another attempt to reduce the necessary high voltages was to produce thinner elastomeric members as seen in Reference [59]. In the fabrication method described by that paper, the thickness variation was 4% and they were able to fabricate a layer of 5 µm thickness, in turn making it possible to drive such systems only at 150 V. Further performance enhancements can be observed if the snap-through instability of such membranes can be harnessed by controlling the air chamber pressure [60], removing the need of constant voltage application. Sometimes the performance range can be enhanced by utilizing a different geometry and a suitable application. For example, in Reference [61], the tubular form was employed for fluidic control. The system was able to create a rise in pressure by 3.0 kPa when the valve was passive and 0 kPa when it was activated at 2.4 kV level.
2.5.4. Operation Range of SMPs
Comparing SMPs with SMAs, the SMPs have large recovery strains (above 300%) while having low recovery stress (around 1–10 MPa) while SMAs have lower recovery strains (less than 8%) and higher recovery stress (around 1 GPa). The other performance related advantages of SMPs come from their biocompatibility, implantable structure and tunable actuation using the glass transition temperature [62]. The super-coiled nylon based SMP actuators have a very encouraging performance when they are used in filament state. For example, extreme twisting and spinning of filaments can form artificial muscles that are able to contract by 49% and can generate around 5.3 KW of mechanical power per kg of the material [27]. In order to further increase the performance and enhance the energy efficiency of such artificial muscles, passive cooling offers and economical solution to increase the cycle rate. According to the same study, when immersed in water, a two-ply, coiled, silver-plated 180 µm diameter nylon fiber can be electro-thermally actuated at 5 Hz while producing 10% stroke and lifting 22 MPa load. In Reference [63], the focus was to program the SMPs for a sustainable and repeatable operation of bidirectional actuation. They have achieved at least 250 cyclic thermally controlled actuations with almost constant performance.
2.5.5. Operation Range of E/MAs
The strain/stroke levels for ferromagnetic-particle printed soft actuators range from 0.15–0.25 within 0.1 s to 0.5 s [15] (p. 278). The estimated torque of the gripper employed in Reference [16] was around 0.18 µNm.
An overall comparison of operation range of all five soft-actuator types is given in Table 3, the force levels are indicated with order as the exact numbers in the literature are often not comparable.
2.6. Modality of Operation
The modality herein describes the energy domain the actuator mainly works in. For example, SMPs are essentially thermo-mechanical actuators because they use the heat energy to relax the bonds between oligomers or re-contract when the heat is taken (cooling). Another case are DEAPs, which work based on electro-actuation depending on the Maxwell and Coulomb Laws defining electro-restrictive and electro-static forces on a flexible capacitor structure. The SMAs mainly work electro-mechanically; however, they exploit the heat to transform the micro-structural change. The FEA types depend on fluidic power to obtain mechanical movement. Comparing these five actuation methods, the SMAs and SMPs are not highly efficient in terms of energy conversion because both of them involve heat processes. The DEAPs are relatively efficient; however, they require amplification of feed-voltage and FEAs require additional complex equipment (compressor, filter, and a valve) for the pressured air. For E/MAs, usually external electromagnetic regulation units are needed. Herein leaving aside the efficiency issue, we consider the five actuators in terms of application suitability based on their modality (thermal, fluidic, electro-magnetic/magnetic, and electro-mechanical). By this way we clearly can identify which modalities are more appropriate for certain applications, therefore matching the actuators with the best applications to accentuate their significant side/leverage their usage.
When the application convenience is considered for SMAs, any case where super-elasticity or shape memory is relevant can be thought. It is not uncommon to have SMAs as actuators in aerospace applications for shape-morphing of aero-foils [64] or for the simplification and compactness of UAV actuation [65]. The super-elasticity and shape memory property of SMAs also make them an excellent actuator choice for biomedical applications [62]. Although being not a conventional mechanical application, SMAs can also be used in small-scale thermal engines and pumps [56]. Mainly utilizing their super-elasticity, civil engineering also benefits from SMA materials [66]; however, these applications usually benefit from the extra damping feature of SMAs and can be considered as passive uses.
The SMPs can be used in very specific applications, such as orthopedics, endoscopic surgery, orthodontics, kidney dialysis, neuro-prosthesis, and bio-MEMs (Bio Micro-Electro-Mechanical Systems) [67]. As a sub-group of SMPs, using the super-coiled Nylon-based yarns, smart-textiles [27] can be produced using nylon as muscles, conductive silver-plated fibers for electro-thermal heating and polyester/cotton mixture for textile functionality.
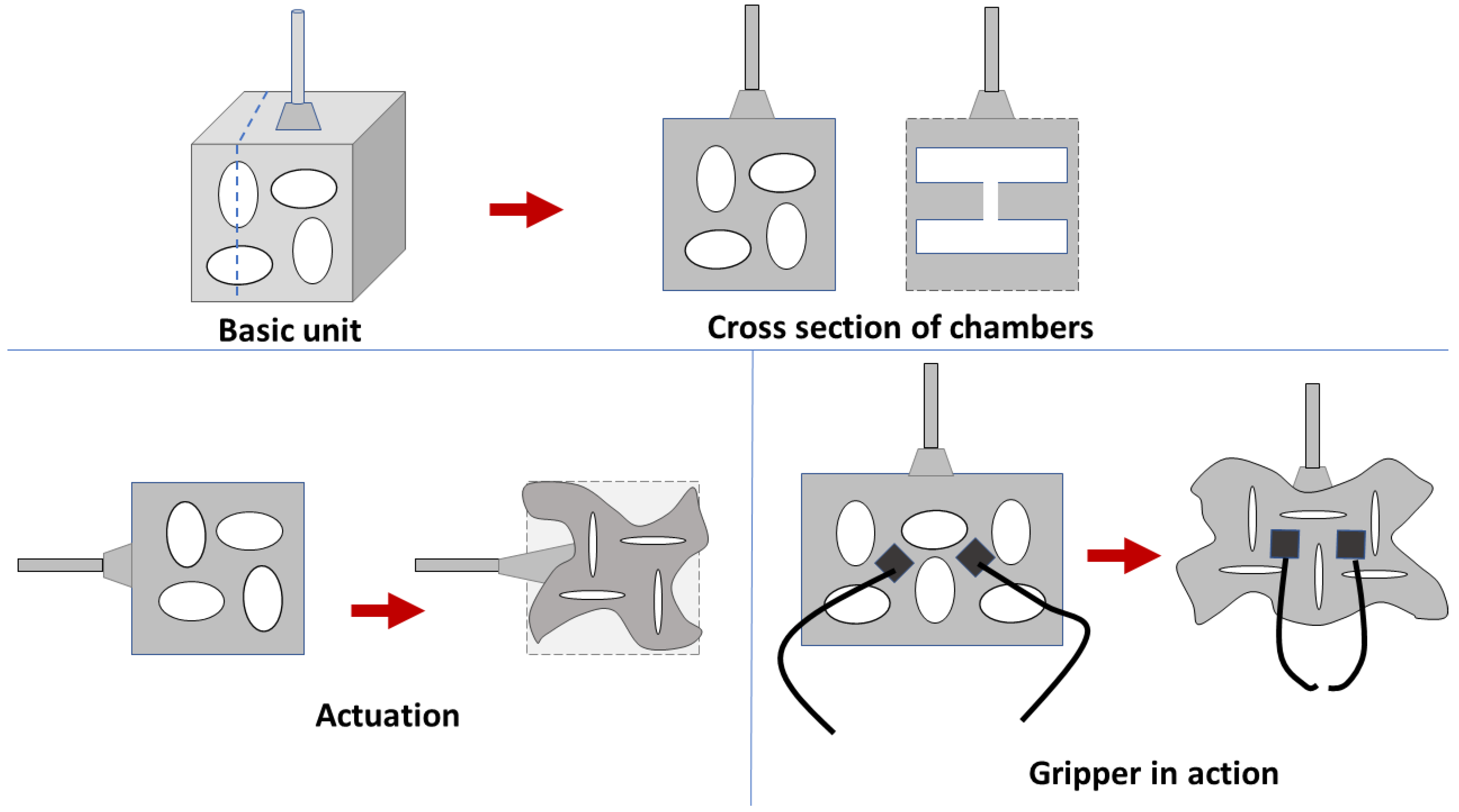
For the FEA type actuators, it does not always have to be with pressurized air or fluid, a non-conventional prototype uses a system of interconnected chambers and vacuum [68] to achieve gripping force with compliant action. In this type of vacuum-operated actuator, the internal air chamber topology is extremely important since it determines the buckling pattern, please see Figure 4.
Sometimes the pneumatic FEAs have to be integrated with a hybrid actuation as seen in Reference [14]. To achieve elongation and bending in controlled directions, FEA and tendon drives can be used together.
Regarding the modality or the physical characteristics of the actuators, a particular good example with the match of the robot function with its environment can be seen in soft jellyfish robot [69] using DEAP-based actuators. This is an application where an underwater robot is designed which can also handle its own load. It also uses pneumatic principles together with DEAP-based actuation to obtain a specific solution for underwater explorations. In order to widen the application of DEAP-based actuators, flexible and stretchable electrodes are extremely important [70].
Since E/MA soft actuators need remote regulation of the magnetic fields, they may not be suitable for all environments. If the environment in which E/MAs will be used also have large deflections of magnetic field, the actuator either should be shielded from this unwanted disturbance or the application domains should be free of magnetic disturbance.
2.7. Controllability
It must be admitted that the soft-actuators usually function together with soft-sensors. This is also necessary to control the force, position or the motion of the actuator. As an example, in Reference [71], using simple flex-sensors, the bending angle of an SPA unit was predicted using a data-driven approach. In a more advanced approach, proprioceptive FFA [72] devices were designed. Another approach could be related with the morphology of the actuator to increase the controllability by increasing the degrees of freedom in the multi-pocket SPA design seen in Reference [73]. Although usually posing a problem for the control, the friction could be used for better control of energy absorption employing the jamming mechanism as seen in Reference [74].
The “controllability” herein refers to the inherent properties of the actuator which might make the control application more feasible or render it more difficult. For example, a non-linear dynamical behavior will be more challenging compared to linear dynamics or the smaller scales introduce the feasibility problems for feedback sensors. However, these obstacles can be overcome by applying non-linear control strategies for highly non-linear systems and self-sensing principle for the smaller scale actuators. Here, the focus is not on the solution of the particular control challenge but the inherent limitations or the challenges that each sensor might have. These challenges are presented in the Table 4.
2.8. Technology Readiness Level (TRL)
This is particularly relevant if these five actuator types are considered to be future solutions for robotics design. Unfortunately, most of the soft-robotics literature reports actuator designs which are not at the adequate TRL, therefore, cannot be widely used outside of the laboratory when they are placed in harsher environments with minimum control on the environmental conditions. We will assess the TRL of the selected five actuators based on the manufacturing methods, complexity, and stability/durability of materials.
Although being employed in many advanced engineering structures as deformation compensators, shape morphing or surface actuation applications especially in aerospace, the SMA-based actuators cannot be considered in the highest category in terms of technological readiness level (TRL). For example, there is still need for more work in identifying the relations between the thermos-mechanical parameters and the resultant behavior of SMAs. In order to predict such relations, a nonlinear model was formed in Reference [75], however, more detailed modeling is necessary. Understanding the underlying mechanism in thermo-mechanical behavior and presenting them in a mathematical model with predictive power is a very important step in terms of increasing the technological readiness level of SMA-based actuators. In this way the disadvantages can be leveraged based on the thermo-mechanical conditions for a particular technological application. It is very effortful to reach to high TRL and asses it. In Reference [76], it was demonstrated that for the full assessment of the TRL of SMAs, mechanical, magnetic, corrosion resistance, and biocompatibility had to be considered.
The DEAPs are technologically not ready to be used fully in medical and industrial robotics. Some of the challenges are actuation force levels, lifetime/durability, and activation voltage levels [32]. An important step to make them more durable and easily manufacturable through an automation process was performed in Reference [31]. There, a fast and automated dry-deposition manufacturing process was demonstrated by producing several multi-layer stack actuators based in roll-to-sheet process. The problem with the DEAP production was that, although well-adapted to laboratory experiments, carbon-based compliant electrodes have limitations with patternability, scalability, and has no practical aspects for the large volume production [71].
For the SMPs, although these materials have been more studied and used in specific applications, their one-way actuation and limited strain endurance limited their potential. In order to alleviate these disadvantages, in Reference [77] a two-way reversible shape memory effect using two types of polymers as the main core and matrix and a double extrusion process. There have been also other works reporting two-way operating SMPs using lamination process [78]. Although the two-way actuation was demonstrated in custom polymer matrix in laboratory conditions, it is not at the level to be used in large quantities or industrial settings. A comparison table for all four actuator types is given in Table 5.
For E/MA soft actuators, it can be said that their TRL might be the lowest among the five actuator types under consideration. These devices are very limited in terms of their current technological level due to scale restrictions and a need for external regulated magnetic field.
3. Case Studies for Application Matching
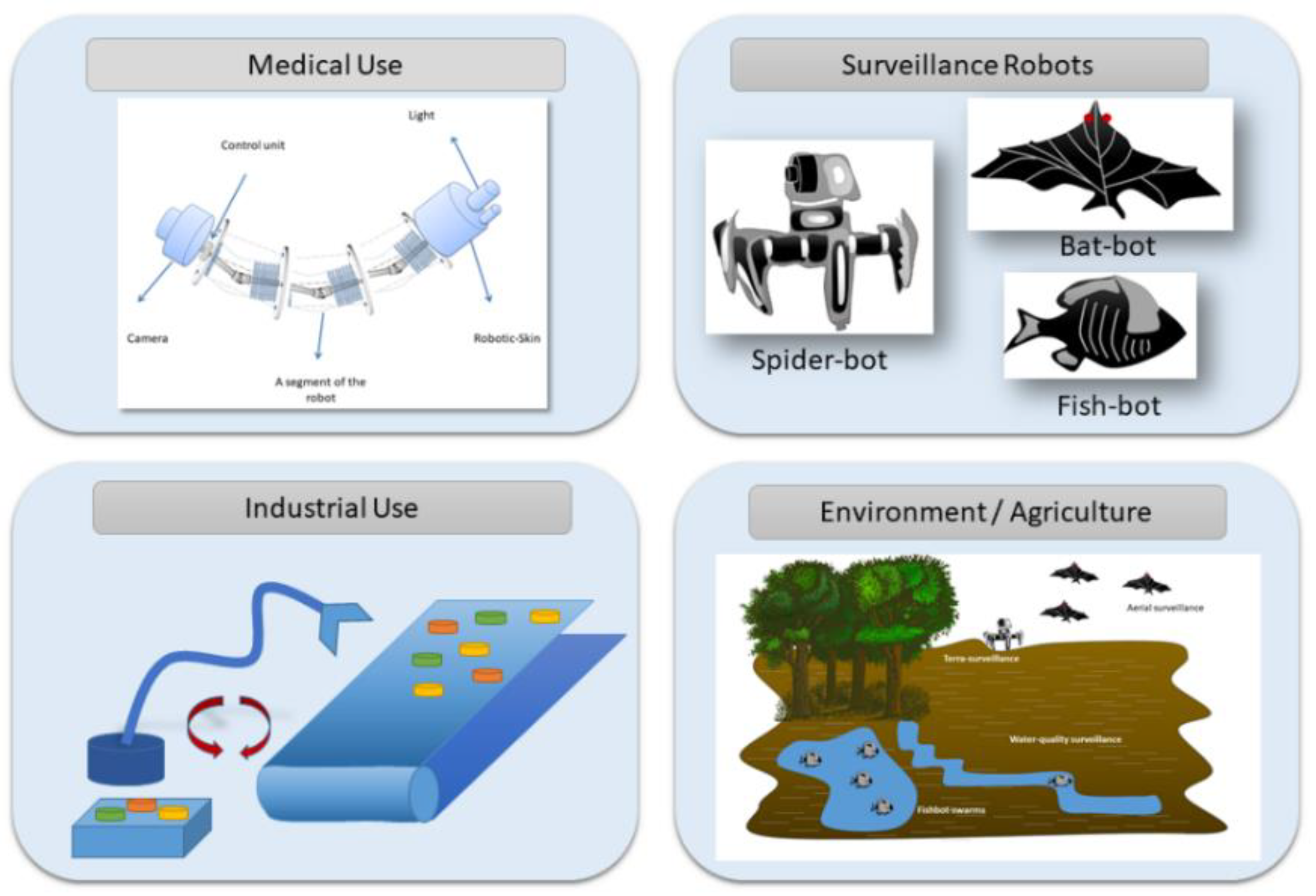
The application of soft-actuators in robotics could range from medical to industrial or even to agricultural and surveillance robots. A conceptual summary of these diverse fields can be seen in Figure 5. To demonstrate the systematical comparison approach herein, four different use-cases have been identified and all actuators are compared in Table 6 according to their suitability for the use-cases. The importance of the performance criteria may change according to the application. For example, it could be meaningful to include the controllability, and durability in adverse ambient conditions such as exposure to extreme heat, humidity, and light. Some of these criteria could very important in the context of medical use since a sterilization might be necessary and the actuator could be exposed to humidity. While the others, such as controllability could be more important in an industrial setting. In order to obtain a rough comparison formula, these different combinations of comparison criteria are listed in Table 6 in the order of importance.
Using this type of importance ranking in criteria, each actuator type can be evaluated by giving it a suitability degree using a [1,2,3,4,5] scale. A rough suitability grading is presented in Table 7.
The resulting overall grading if all the criteria has the same weight factor leads to the ranking seen in Table 8. Here, the actuators are matched to an application domain having (*) for lowest and (***) for the highest matching properties.
It can be easily seen that this type of ranking helps to see which type of actuator is particularly suitable for an application area, but it also can be misleading if the weights of criteria are not adjusted. For example, the SMA type actuators seem to be not suitable for any application if the criteria are taken in equal weights. However, it can easily make a difference if operation range and scalability is considered. In addition to this, some additional criteria such as sterilization, hygiene, and compatibility with medical rules make it more appropriate for medical use-cases, although it is not detectable in a blind comparison just based on the technical information. Therefore, the method provided here should be supported with additional criteria from the use-case domain where necessary.
Early examples of limited combinations of actuator types for hybrid solutions are studied, for example SMA and SMP combinations for more effective solutions have been proposed in Reference [41]. However, a wider exploration space is necessary for the combinations of the actuator types. An early evaluation of all possible combinations is prepared (see Table 9) here with possible application domains and leveraged capabilities.
As it can be seen in this combination (Table 9), many novel hybrid actuators can be envisioned and produced to strengthen an attribute of a certain actuator type while allowing the other type to fill in the potential gaps. The application domains of soft and novel actuators can be widened using multiple actuator types in a suitable topological and geometrical arrangement or using additive manufacturing possibilities (e.g., depositing, sputtering) to obtain a better hybrid actuator with some leverage in energy efficiency, controllability or improvement of operation range.
4. Conclusions
In this comprehensive overview of the soft and novel actuators in robotics, we have considered eight categories of selection criteria over five different type actuators. The overview provides a state-of-the-art evaluation of the field as well as offers a selection guide for the researchers in applied robotics fields, especially involving soft robotics. It is very difficult to judge if a particular actuation device is appropriate for the given application without a clear comparison ground. Therefore, this paper attempts to contribute a more systematical approach in assessment. Lastly, as an open discussion for the research community especially in soft robotics, combinations of these five types of actuators should be further studied to identify the areas in which leveraging compliance, scalability, controllability, operation-range, and energy efficiency is possible.
Funding
This research was funded by Alexander von Humboldt Foundation, Experienced Researcher Fellowship for Boyraz during 2016–2017.
Acknowledgments
The authors would like to thank Tobias Ortmaier for providing the hosting opportunity at G.W. Leibniz Universität Hannover during AvH Fellowship.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elango, N.; Faudzi, A.A.M. A review article: Investigations on soft materials for soft robot manipulations. Int. J. Adv. Manuf. Technol. 2015, 80, 1027–1037. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, S.20400–S.20403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gaiser, I.; Wiegand, R.; Ivlev, O.; Andres, A.; Breitwieser, H.; Schulz, S.; Bretthauer, G. Compliant Robotics and Automation with Flexible Fluidic Actuators and Inflatable Structures. In Smart Actuator and Sensing Systems—Recent Advances and Future Challenges; InTech: London, UK, 2012; Chapter 22; pp. 567–608. [Google Scholar]
- Moseley, P.; Florez, J.M.; Sonar, H.A.; Agarwal, G.; Curtin, W.; Paik, J. Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method. Adv. Eng. Mater. 2016, 18, 978–988. [Google Scholar] [CrossRef]
- Gaiser, I.; Schulz, S.; Breitwieser, H.; Bretthauer, G. Enhanced Flexible Fluidic Actuators for Biologically Inspired Lightweight Robots with Inherent Compliance. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 1–6. [Google Scholar]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A Recipe for Soft Fluidic Elastomer Robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef] [PubMed]
- Tsagarakis, N.; Caldwell, D. Improved modelling and assessment of pneumatic muscle actuators. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’00), San Francisco, CA, USA, 24–28 April 2000; Volume 4. [Google Scholar]
- Mutlu, R.; Alici, G.; Xiang, X.; Li, W. Electro-mechanical modelling and identification of electroactive polymer actuators as smart robotic manipulators. Mechatronics 2014, 24, 241–251. [Google Scholar] [CrossRef]
- Lee, K.; Tawfick, S. Fiber Micro-Architected Electro-Elasto-Kinematic Muscles. Extreme Mech. Lett. 2016, 8, 64–69. [Google Scholar] [CrossRef]
- Mirfakhrai, T.; Madden, J.D.W.; Baughman, R.H. Polymer artificial muscles. Mater. Today 2007, 10, 30–38. [Google Scholar] [CrossRef]
- Mathijssen, G.; Schultz, J.; Vanderborght, B.; Bicchi, A. A muscle-like recruitment actuator with modular redundant actuation units for soft robotics. Robot. Auton. Syst. 2015, 74, 40–50. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, J.N.; Zhu, C.; Duoss, E.B.; Wilson, T.S.; Spadaccini, C.M.; Lewicki, J.P. Shape-morphing composites with designed micro-architectures. Sci. Rep. 2016, 6, 27933. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stilli, A.; Wurdemann, H.A.; Althoefer, K. Shrinkable, stiffness-controllable soft manipulator based on a bio-inspired antagonistic actuation principle. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Res. Lett. 2018, 558, 274–291. [Google Scholar] [CrossRef] [PubMed]
- Do, T.N.; Phan, H.; Nguyen, T.-Q.; Visell, Y. Miniature Soft Electromagnetic Actuators for Robotic Applications. Adv. Funct. Mater. 2018, 28, 1800244. [Google Scholar] [CrossRef]
- Hodgson, D.E.; Biermann, R.J. Shape Memory Alloys. In ASM Handbook, Vol 2: Properties and Selection: Non-Ferrous Alloys and Special Purpose Materials; ASM International: Almere, The Netherlands, 1990; pp. 897–902. [Google Scholar]
- Madden, J.D.W. Dielectric Elastomers as High-performance Electroactive Polymers. In Dielectric Elastomers as Electromechanical Transducers; Carpi, F., De Rossi, D., Kornbluh, R., Pelrine, R., Sommer-Larsen, P., Eds.; Elsevier: Amsterdam, The Netherlands, 2008; Chapter 2. [Google Scholar]
- Johnston, I.D.; McCluskey, D.K.; Tan, C.K.L.; Tracey, M.C. Mechanical Characterization of Bulk Sylgard 184 for microfluidics and micro-engineering. J. Micromech. Microeng. 2014, 24, 1–7. [Google Scholar] [CrossRef]
- Liu, C.; Qin, H.; Mather, P.T. Review of progress in shape-memory polymers. J. Mater. Chem. 2007, 17, 1543–1558. [Google Scholar] [CrossRef]
- An, S.-M.; Ryu, J.; Cho, M.; Cho, K.-J. Engineering design framework for a shape memory alloy coil spring actuator using a static two-state model. Smart Mater. Struct. 2012, 21, 5. [Google Scholar] [CrossRef]
- Sofla, A.Y.N.; Elzey, D.M.; Wadley, H.N.G. Two-way antagonistic shape actuation based on the one-way shape memory effect. J. Intell. Mater. Syst. Struct. 2008, 19, 1017–1027. [Google Scholar] [CrossRef]
- Elsayed, Y.; Lekakou, C.; Geng, T.; Saaj, C.M. Design optimization of soft silicone pneumatic actuators using finite element analysis. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Besancon, France, 8–11 July 2014. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.B.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of Soft Fiber-Reinforced Bending Actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A Resilient, Untethered Soft Robot. Soft Robot. 2014, 1, S.213–S.223. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.; Whitesides, G. Pneumatic networks for soft robotics that actuate rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Haines, C.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.W.; Kim, S.H.; Fang, S.; de Andrade, M.J.; Göktepe, F.; et al. Artificial Muscles from Fishing Line and Sewing Thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef] [PubMed]
- Balasubramanian, A.; Bettinger, C.J. Shape recovery kinetics in vascularized 3D-printed polymeric actuators. Adv. Eng. Mater. 2015, 17, 1287–1293. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Joseph, J. Electrostriction of polymer dielectrics with compliant electrodes as a means of actuations. Sens. Actuators A Phys. 1998, 64, 77–85. [Google Scholar] [CrossRef]
- Carpi, F.; Salaris, C.; De Rossi, D. Folded dielectric elastomer actuators. Smart Mater. Struct. 2007, 16, 300–305. [Google Scholar] [CrossRef]
- Maas, J.; Tepel, D.; Hoffstadt, T. Actuator design and automated manufacturing process for DEAP-based multilayer stack actuators. Soft Mechatron. 2015, 50, 2839–2854. [Google Scholar] [CrossRef]
- Bar-Cohen, Y.; Cardoso, V.F.; Ribeiro, C.; Lanceros-Méndez, S. Electroactive Polymers as Actuators, In Advanced Piezoelectric Materials: Science and Technology, 2nd ed.; Woodhead Publishing Limited: Sawston, UK, 2010; Chapter 8. [Google Scholar]
- Pei, Q.; Rosenthal, M.; Pelrine, R.; Stanford, S.; Kornbluh, R. Multifunctional electroelastomer roll actuators and their application for biomimetic walking robots. Proc. SPIE 2002, 4698. [Google Scholar] [CrossRef]
- Shian, S.; Bertoldi, K.; Clarke, D.R. Dielectric elastomer based grippers for soft robotics. Adv. Mater. 2015, 27, 6814–6819. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Res. Lett. 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Lopez-Ferreno, I.; San Juan, J. Micro pulling growth of very thin shape memory alloys single crystals. Funct. Mater. Lett. 2017, 10, 1740003. [Google Scholar] [CrossRef]
- Sheng, J.; Gandhi, D.; Gullapalli, R.; Simard, J.M.; Desai, J.P. Development of a Meso-scale SMA-based Torsion Actuator for Image-Guided Procedures. IEEE Trans. Robot. 2017, 33, 240–248. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Fang, C.; Liu, J. Large size superelastic SMA bars: Heat treatment strategy, mechanical property and seismic application. Smart Mater. Struct. 2016, 25, 075001. [Google Scholar] [CrossRef]
- Zhao, H.; Li, Y.; Elsamadisi, A.; Shepherd, R. Scalable manufacturing of high force wearable soft actuators. Extreme Mech. Lett. 2015, 3, 89–104. [Google Scholar] [CrossRef]
- Shapiro, Y.; Wolf, A.; Gabor, K. Bi-bellows: Pneumatic bending actuator. Sens. Actuators A Phys. 2011, 167, 484–494. [Google Scholar] [CrossRef]
- Lelieveld, C.; Jansen, K.; Teuffel, P. Mechanical characterization of a shape morphing smart composite with embedded shape memory alloys in a shape memory polymer matrix. J. Intell. Mater. Syst. Struct. 2015, 27, 1–11. [Google Scholar] [CrossRef]
- Yip, M.C.; Niemeyer, G. High-performance robotic muscles from conductive nylon sewing thread. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2313–2318. [Google Scholar]
- Wissler, M.; Mazza, E. Modeling of a pre-strained circulator actuator made of dielectric elastomers. Sens. Actuators A Phys. 2005, 120, 184–192. [Google Scholar] [CrossRef]
- Spinella, I.; Dragoni, E. Analysis and design of hollow helical springs for shape memory alloys. J. Intell. Mater. Syst. Struct. 2010, 21, 185–199. [Google Scholar] [CrossRef]
- Zong, H.; Ni, Z.; Ding, X.; Lookman, T.; Sun, J. Origin of low thermal hysteresis in shape memory alloy ultrathin films. Acta Mater. 2016, 103, 407–415. [Google Scholar] [CrossRef]
- Belyaev, S.; Resnina, N.; Zhruravlev, R. Work production and variation in shape memory effects during thermal cycling of equiatomic TiNi alloy. J. Mater. Eng. Perform. 2014, 23, 2343–2346. [Google Scholar] [CrossRef]
- Roy, M.; Nelson, J.K.; MacCrone, R.K.; Schadler, L.S.; Reed, C.W.; Keefe, R. Polymer nanocomposite dielectric-the role of the interface. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 629–643. [Google Scholar] [CrossRef]
- Koh, S.J.A.; Zhao, X.; Suo, Z. Maximal energy that can be converted by a dielectric elastomer generator. Appl. Phys. Lett. 2009, 94, 262902. [Google Scholar] [CrossRef]
- Wehner, M.; Tolley, M.T.; Menguc, Y.; Park, Y.-L.; Mozeika, A.; Ding, Y.; Onal, C.; Shepherd, R.F.; Whitesides, G.M.; Wood, R.J. Pneumatic Energy Sources for Autonomous and Wearable Soft Robotics. Soft Robot. 2014, 2, 1–12. [Google Scholar] [CrossRef]
- Coral, W.; Rossi, C.; Colorado, J.; Lemus, D.; Barrientos, A. SMA Based Muscle-Like Actuation in Biologically Inspired-Robots: A Stateof the Art Review. In Smart Actuation and Sensing Systems—Recent Advances and Future Challenges; Berselli, G., Ed.; InTech: London, UK, 2012; p. 5382. [Google Scholar]
- Follador, M.; Cianchetti, M.; Arienti, A.; Laschi, C. A general method for the design and fabrication of shape memory alloy active spring actuators. Smart Mater. Struct. 2012, 21, 115029. [Google Scholar] [CrossRef]
- Sehitoglu, H.; Wu, Y.; Patriarca, L. Shape memory functionality under multi-cycles in NiTiHf. Scr. Mater. 2017, 129, 11–15. [Google Scholar] [CrossRef]
- Niyajama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch Motors: Printable Soft Actuators Integrated with Computational Design. Soft Robot. 2015, 2, 59–70. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.M.; Li, H.; Poh, M.; Xia, F.; Cheng, Z.Y.; Xu, H.; Huang, C. An all-organic composite actuator material with a high dielectric constant. Nature 2002, 149, 284–287. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, W.R.; Wilson, E.D.; Assaf, T.; Rossiter, J.; Dodd, T.J.; Porrill, J.; Anderson, S.R. Control-focused, nonlinear and time-varying modelling of dielectric elastomer actuators with frequency response analysis. Smart Mater. Struct. 2015, 24, 5. [Google Scholar] [CrossRef]
- Ossmer, H.; Wendler, F.; Gueltig, M.; Lambrecht, F.; Miyazaki, S.; Kohl, M. Energy-efficient minature-scale heat pumping based on shape memory alloys. Smart Mater. Struct. 2016, 25, 8. [Google Scholar] [CrossRef]
- Ignat, M.; Ovezea, D.; Hamciuc, E.; Hamciuc, C.; Dimitrov, L. Study on the electromechanical properties of polyimide composites containing TiO2 nanotubes and carbon nanotubes. J. Polym. Res. 2014, 21, 536. [Google Scholar] [CrossRef]
- Lotz, P.; Matysek, M.; Schlaak, H.F. Fabrication and Application of Miniaturized Dielectric Elastomer Stack Actuators. IEEE/ASME Trans. Mechatron. 2011, 16, 58–66. [Google Scholar] [CrossRef]
- Schmidt, A.; Bergamini, A.E.; Kovacs, G.; Mazza, E. Experimental characterization and modeling of circular actuators made of interpenetrating polymer network-reinforced acrylic elastomer. J. Intell. Mater. Syst. Struct. 2013, 24, 1257–1265. [Google Scholar] [CrossRef]
- Keplinger, C.; Li, T.; Baumgartner, R.; Suo, Z.; Bauer, S. Harnessing snap-through instability in soft dielectrics to achieve giant voltage-triggered deformation. Soft Matter 2012, 8, 285–288. [Google Scholar] [CrossRef]
- McCoul, D.; Pei, Q. Tubular dielectric actuator for active fluidic control. Smart Mater. Struct. 2015, 24, 105016. [Google Scholar] [CrossRef]
- Zainal, M.A.; Sahlan, S.; Ali, M.S.M. Micromachined Shape-Memory-Alloy Microactuators and Their Application in Biomedical Devices. Micromachines 2015, 6, 879–901. [Google Scholar] [CrossRef] [Green Version]
- Behl, M.; Kratz, K.; Nöchel, U.; Sauter, T.; Lendlein, A. Temperature-Memory Polymer Actuators. Proc. Natl. Acad. Sci. USA 2013, 110, 12555–12559. [Google Scholar] [CrossRef] [PubMed]
- Karagiannis, D.; Stamatelos, D.; Kappatos, V.; Spathopoulos, T. An investigation of shape memory alloys as actuating elements in aerospace morphing applications. Mech. Adv. Mater. Struct. 2017, 24, 647–657. [Google Scholar] [CrossRef]
- Ameduri, S.; Concilio, A.; Favaloro, N.; Pellone, L. A shape memory alloy application for compact unmanned aerial vehicles. Aerospace 2016, 3, 1–18. [Google Scholar] [CrossRef]
- Chang, W.-S.; Araki, Y. Use of shape-memory alloys in construction: A critical interview. Proc. Inst. Civ. Eng. 2016, 169, 87–95. [Google Scholar]
- Small, W., IV; Singhal, P.; Wilson, T.S.; Maitland, D.J. Biomedical Applications of Thermally Activated Shape Memory Polymers. J. Mater. Chem. 2010, 20, 3356–3366. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.; Mosadegh, B.; Ainla, A.; Lee, B.; Khashai, F.; Suo, Z.; Bertoldi, K.; Whitesides, G.M. Buckling of elastomeric beams enables actuation of soft machines. Adv. Mater. 2016, 27, 6323–6327. [Google Scholar] [CrossRef] [PubMed]
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A soft jellyfish robot driven by a dielectric elastomer actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Rosset, S.; Shea, H.R. Flexible and stretchable electrodes for dielectric elastomer actuators. Appl. Phys. A 2013, 110, 281–307. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Data-driven Bending Angle Prediction of Soft Pneumatic Actuators with Embedded Flex Sensors. IFAC-PapersOnLine 2016, 49, 513–520. [Google Scholar] [CrossRef]
- Helps, T.; Rossiter, J. Proprioceptive Flexible Fluidic Actuators Using Conductive Working Fluids. Soft Robot. 2018, 5, 175–189. [Google Scholar] [CrossRef] [PubMed]
- Tarvainen, T.V.J.; Yu, W. Pneumatic Multi-Pocket Elastomer Actuators for Metacarpophalangeal Joint Flexion and Abduction-Adduction. Actuators 2017, 6, 27. [Google Scholar] [CrossRef]
- Choi, I.; Corson, N.; Peiros, L.; Hawkes, E.W.; Keller, S.; Follmer, S. A Soft, Controllable, High Force Density Linear Brake Utilizing Layer Jamming. IEEE Robot. Autom. Lett. 2018, 3, 450–457. [Google Scholar] [CrossRef]
- Jani, J.M.; Huang, S.; Leary, M.; Subic, A. Numerical modeling of shape memory alloy linear actuator. Comput. Mech. 2015, 56, 443–461. [Google Scholar] [CrossRef]
- Feng, Y.P.; Blanquer, A.; Fornell, J.; Zhang, H.; Solsona, P.; Baro, M.D.; Surinach, S.; Ibanez, E.; Garcia-Lecina, E.; Wei, X.; et al. Novel Fe-Mn-Si-Pd alloys: Insights into mechanical, magnetic, corrosion resistance and biocompatibility performances. J. Mater. Chem. B 2016, 4, 6402–6412. [Google Scholar] [CrossRef]
- Westbrook, K.K.; Mather, P.T.; Parakh, V.; Dunn, M.L.; Ge, Q.; Lee, B.M.; Qi, H.J. Two-way reversible shape memory effects in a free-standing polymer composite. Smart Mater. Struct. 2011, 20, 6. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Zhuo, H.; Zhu, Y. Two-way shape memory effect in polymer laminates. Mater. Lett. 2008, 62, 4088–4090. [Google Scholar] [CrossRef]
- Sadeghzadeh, A.; Asua, E.; Feuchtwanger, J.; Etxebarria, V.; Garcia-Arribas, A. Ferromagnetic shape memory alloy actuator enabled for nanometric position control using hysteresis compensation. Sens. Actuators A Phys. 2012, 182, 122–129. [Google Scholar] [CrossRef]
- McCoul, D.; Rosset, S.; Besse, N.; Shea, H. Multifunctional shape memory electrodes for dielectric elastomer actuators enabling high holding force and low-voltage multisegment addressing. Smart Mater. Struct. 2017, 26, 1–10. [Google Scholar] [CrossRef]
- Schmidt, A.M. Electromagnetic Activation of Shape Memory Polymer Networks Containing Magnetic Nanoparticles. Macromol. Rapid Commun. 2006, 27, 1168–1172. [Google Scholar] [CrossRef]
- Said, M.M.; Yunas, J.; Bais, B.; Hamzah, A.A.; Majlis, B.Y. The Design, Fabrication, and Testing of an Electromagnetic Micropump with a Matrix-Patterned Magnetic Polymer Composite Actuator Membrane. Micromachines 2018, 9, 1–10. [Google Scholar]
- Tone, T.; Suzuki, K. An Automated Liquid Manipulation by Using a Ferrofluid-Based Robotic Sheet. IEEE Robot. Autom. Lett. 2018, 3, 2814–2821. [Google Scholar] [CrossRef]
Figure 1.
Different geometry/topological arrangements of SMA to increase the stroke or force, with subtle effects on cooling and reaction time.
Figure 1.
Different geometry/topological arrangements of SMA to increase the stroke or force, with subtle effects on cooling and reaction time.

Figure 2.
Ribbed, cylindrical, and pleated FEA, based on [7].
Figure 2.
Ribbed, cylindrical, and pleated FEA, based on [7].

Figure 3.
Rotational casting method (a) machine; (b) interior structure; (c) monoliths; (d) encapsulation; and (e) inflation of cuboid actuator, based on [29].
Figure 3.
Rotational casting method (a) machine; (b) interior structure; (c) monoliths; (d) encapsulation; and (e) inflation of cuboid actuator, based on [29].

Figure 4.
Vacuum-operated buckling FEA actuators, based on [51].
Figure 4.
Vacuum-operated buckling FEA actuators, based on [51].

Figure 5.
Conceptual illustrations of diverse applications for soft-actuators.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Evaluation of FEA type for illustrative example of the review methodology.
| Criteria | Qualitative Evaluation | Quantitative Information |
|---|---|---|
| Mechanical compliance | Inherently compliant, variable stiffness is possible | 0.5 Nm/degree @10 Bar, 0.016 Nm/degree @ 5 Bar [6], (Figure 22, Actuator with 18 mm Diameter) |
| Optimal geometry | Determined by fluidic chamber size and fluidic-network topology | For Tip Force/Energy: Ribbed Segment (0.58 N/J), Cylindrical (0.83 N/J), Pleated (0.4 N/J) [7], (Figure 10d) |
| Scalability | Scalable, easy to manufacture | Casting (80%), Layering (20%) |
| Energy efficiency | Amplification through structural parameters and snap-through property | Watt/Weight: 1 W/g [8] |
| Operation range | Wide (from micro- to macro-scale) | Force: up to 10 N, Stroke: up to 10 cm, Pressure: up to 0.5 MPa [8] |
| Modality | Pneumatics/hydraulics | --- |
| Controllability | Poor for SPA, good for FFA | |
| TRL | Utilizes existing hydraulic, pneumatic structures and polymer designs | TRL 6–8 |
FEA: fluid elastomer actuators, SPA: soft pneumatic actuators, FFA: flexible fluidic actuators, TRL: technology readiness level
Table 2.
Evaluation of soft/novel actuators according to compliance criteria (Section 2.1).
Table 2.
Evaluation of soft/novel actuators according to compliance criteria (Section 2.1).
| Actuator Type | Qualitative Evaluation (Section 2.1) | Quantitative Info (Section 2.1) |
|---|---|---|
| SMA (Shape Memory Alloys) | SMA has almost no inherent compliancy. It is not compliant in martensite phase and the austenitic phase lasts only when it is heated. However, when used in spring form or meandering profiles, it can obtain certain compliant features due to form. SMA enables light-weight construction when the circuits are left outside of the robotic structure. | For Ti-Ni type SMA, 80–85 GPa (for austenite) 28–60 GPa (for martensite) [17] 20–80 GPa [18] |
| FEA (Fluidic Elastomeric Actuators) | FEA platforms are inherently compliant due to the structural elements mostly comprising elastomeric polymers. The fluid also contributes to the compliance, however it can be varied by changing the internal pressure of fluidic chambers. FEA is essentially a light-weight structure if compressors and the pneumatic circuit elements are left outside of the robot. | 0.5 Nm/degree @10 Bar, 0.016 Nm/degree @ 5 Bar [6] (Same with the chamber material compliance when deflated: 1.32–2.97 MPa for PDMS) [19] |
| SMP (Shape Morphing Polymers) | SMPs are also inherently compliant because of the polymers used in the structure. However, the thermal actuation can largely affect the state of the polymer and in some states the polymer is more rigid. | 0.01–3 GPa [20] |
| DEAP (Dielectric-Electrically Actuated Polymers) | DEAP uses a hyper-elastic polymer membrane and compliant/stretchable electrodes, therefore it is inherently compliant. However, the pre-stretching rings or any rigid structure around it may cause the increased stiffness. DEAP supports light-weight structures however the high-voltage circuit should be placed away from the robotic platform. | 0.1–3 MPa [18] |
| E/MA (Magnetic/Electro-Magnetic Actuators) | E/MA can be produced as soft actuators using ferromagnetic particles in a polymeric substrate or embedding a stretchable/flexible coil in a softer substrate. In all cases, while the particles and coils limits the compliance, the polymeric substrates are the main compliance provider. | 0.001–0.05 GPa (Generic silicone rubbers, depending on mixture proportions) |
Table 3.
Evaluation of soft/novel actuators according to operation range (Section 2.5).
Table 3.
Evaluation of soft/novel actuators according to operation range (Section 2.5).
| Actuator | Force | Strain/Stroke |
|---|---|---|
| SMA | F × 10−1 | 5–8% |
| FEA | F × 102 | <28% |
| SMP | F × 10 | 10% |
| DEAP | F × 100 | 40% (as single membrane) |
| E/MA | F × 10−4 | 15–25% |
Table 4.
Evaluation of soft/novel actuators according to operation range (Section 2.7).
Table 4.
Evaluation of soft/novel actuators according to operation range (Section 2.7).
| Actuator | Control Challenge |
|---|---|
| SMA | Hysteresis, slow response time. |
| FEA | Non-linear behavior of pneumatic modality due to compressibility and dependencies on temperature. |
| SMP | Non-linear and often unidentified behavior, non-linear dependencies on temperature. |
| DEAP | Electrical break-down limits, mechanical strain limits, durability, extra need for signal conditioning and amplification. |
| E/MA | mm-scale dimensions, magnetic interference. |
Table 5.
Application oriented TRL comparison of soft and novel actuators.
| Actuator | TRL | Explanation |
|---|---|---|
| SMA | 6–8 | Adequate research background, some applications in robotics, still needs to be developed into full products. The problems with hysteresis and limited work-range needs attention. |
| FEA | 6–8 | Built on pneumatics and hydraulics, closer to be produced for large amounts in an automated manner. Limited range of work. |
| SMP | 5–7 | Very few examples outside of laboratory, complex manufacturing and control systems, one-way actuation, limited mechanical recovery. |
| DEAP | 5–7 | Very few examples outside of laboratory, still needs improvement on raw materials, control and electro-mechanical design improvements. Limited due to high voltage requirements and low energy density. |
| E/MA | 4–5 | Novel mm-scale actuators based on strictly controlled laboratory experiments such as in References [16,35]. |
Table 6.
The most important combinations of criteria sub-groups.
| Domain | Criteria to be taken |
|---|---|
| Medical | Compliance, controllability, scalability, topology, operation range |
| Industrial | Energy efficiency, operation range, compliance, TRL |
| Haptic-Interface | Compliance, scalability, topology, controllability |
| Active Safety in Automotive | Compliance, modality, scalability, energy efficiency, controllability |
Table 7.
The most important combinations.
| Domain | SMA | FEA | SMP | DEAP | E/MA |
|---|---|---|---|---|---|
| Medical | 2,2,3,2,3 | 5,2,5,4,4 | 5,2,5,4,2 | 5,3,3,2,2 | 5,2,2,2,2 |
| Industrial | 2,3,2,4 | 3,4,5,4 | 1,2,5,3 | 4,2,5,3 | 4,2,5,1 |
| Haptic-Interface | 2,3,2,2 | 5,5,4,2 | 5,5,4,2 | 5,3,2,3 | 5,2,2,2 |
| Active Safety in Automotive | 2,1,3,2,2 | 5,1,5,3,2 | 5,1,5,1,2 | 5,1,3,4,3 | 5,1,2,4,2 |
Table 8.
Comparison of actuators based on application domain.
| Actuator | Medical | Industrial | Haptic-Interface | Active Safety in Automotive |
|---|---|---|---|---|
| SMA | * | * | * | * |
| FEA | *** | *** | *** | *** |
| SMP | ** | * | *** | ** |
| DEAP | ** | ** | ** | *** |
| E/MA | * | ** | * | ** |
Table 9.
Soft and novel actuator combination table for all hybrid solutions.
| Combination | Improvement/Leverage | Application Domain |
|---|---|---|
| SMA + SMP | Wider bandwidth, removal of the need for external force for SMP, wider cooling window for SMA | Active construction solutions, adaptive and self-healing structures, soft robotics solutions in construction |
| SMA + FEA | Antagonistic principle can be used, wider time window for SMA to cool down, fast responses with FEA action, increase in compliancy, light-weight, shape morphing and stiffness variation is possible | Spine-like or worm-like structures in surgical robotics |
| SMA + DEAP | Antagonistic working principle can be supported. However, the device will be very complicated and inefficient in terms of energy use. | Soft-robotics in mini-scale |
| SMA + E/MA | Faster response due to magnetic actuation, contactless actuation. Disadvantages may involve non-reproducible movement characteristics due to hysteresis but this could be eliminated using feedback control. | Precise positioning systems in nanometer scale [79] |
| SMP + FEA | Superb-shape morphing property via thermal or pneumatic actuation, low-weight | Soft surgical robots and exe-skeletons for augmenting human posture and physio-therapy, soft and adaptable prosthesis structures |
| SMP + DEAP | DEA using flexible electrodes made of conductive SMP, allowing DEA to be rigid on the cold state, resulting a greater holding force | Micro-grippers with minimum-energy principle, tunable optics, haptic displays, microfluidics [80] |
| SMP + E/MA | Using surface modified super-paramagnetic nanoparticles in SMP substrate, remote actuation of complex shapes is possible. Magnetic particles serve as nano-antennas for magnetic heating, rendering the combined system as untethered. | Life sciences, minimally invasive surgery and novel sensor-actuator system for compact volumes [81] |
| FEA + DEAP | Snap-through property can be used to increase overall stroke or force capability, increased electro-mechanical durability of DEAP, removal of constant need to pressurize a particular system | Active touch-boards, haptic displays, and human-machine interfaces |
| FEA + E/MA | Using ferro-magnetic fluids or magnetic particles in polymer substrates untethered actuation of fluids is achieved. The actuator form can be unusual such as a large surface sheet. | Life sciences and micro-fluidic devices: Electromagnetic micro-pump using magnetic polymer [82], liquid manipulation using ferro-fluid based robotic sheet [83] |
| DEAP + E/MA | This is not reported yet and an obvious leverage might be reduction in the high-voltage requirement of DEA structure. | Low-voltage applications of DEAP using magnetic field for better response. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Boyraz, P.; Runge, G.; Raatz, A. An Overview of Novel Actuators for Soft Robotics. Actuators 2018, 7, 48. https://doi.org/10.3390/act7030048
AMA Style
Boyraz P, Runge G, Raatz A. An Overview of Novel Actuators for Soft Robotics. Actuators. 2018; 7(3):48. https://doi.org/10.3390/act7030048
Chicago/Turabian StyleBoyraz, Pinar, Gundula Runge, and Annika Raatz. 2018. "An Overview of Novel Actuators for Soft Robotics" Actuators 7, no. 3: 48. https://doi.org/10.3390/act7030048
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.