Soft Pneumatic Actuators for Rehabilitation

Department of Mechanical and Aerospace Engineering, Politecnico di Torino, Corso Duca degli Abruzzi 24, Torino 10129, Italy
*
Author to whom correspondence should be addressed.
Actuators 2014, 3(2), 84-106; https://doi.org/10.3390/act3020084
Submission received: 12 December 2013
/
Revised: 30 April 2014
/
Accepted: 4 May 2014
/
Published: 26 May 2014
(This article belongs to the Special Issue Soft Actuators)
Abstract
:Pneumatic artificial muscles are pneumatic devices with practical and various applications as common actuators. They, as human muscles, work in agonistic-antagonistic way, giving a traction force only when supplied by compressed air. The state of the art of soft pneumatic actuators is here analyzed: different models of pneumatic muscles are considered and evolution lines are presented. Then, the use of Pneumatic Muscles (PAM) in rehabilitation apparatus is described and the general characteristics required in different applications are considered, analyzing the use of proper soft actuators with various technical properties. Therefore, research activity carried out in the Department of Mechanical and Aerospace Engineering in the field of soft and textile actuators is presented here. In particular, pneumatic textile muscles useful for active suits design are described. These components are made of a tubular structure, with an inner layer of latex coated with a deformable outer fabric sewn along the edge. In order to increase pneumatic muscles forces and contractions Braided Pneumatic Muscles are studied. In this paper, new prototypes are presented, based on a fabric construction and various kinds of geometry. Pressure-force-deformation tests results are carried out and analyzed. These actuators are useful for rehabilitation applications. In order to reproduce the whole upper limb movements, new kind of soft actuators are studied, based on the same principle of planar membranes deformation. As an example, the bellows muscle model and worm muscle model are developed and described. In both cases, wide deformations are expected. Another issue for soft actuators is the pressure therapy. Some textile sleeve prototypes developed for massage therapy on patients suffering of lymph edema are analyzed. Different types of fabric and assembly techniques have been tested. In general, these Pressure Soft Actuators are useful for upper/lower limbs treatments, according to medical requirements. In particular devices useful for arms massage treatments are considered. Finally some applications are considered.
Keywords:
textile actuators; pneumatic muscles; pneumatic soft actuators; soft actuators for active cloths; active suits; new soft actuators for limbs rehabilitation; new motors for human limbs; soft actuators for human control movements; unusual woven applications; textile engineering for intelligent garments1. Introduction
The need for rehabilitation therapies and equipment is continually increasing as a result of two factors: population ageing and the large number of injuries from traffic accidents.
Population ageing [1] is one of the most significant trends of the 21st century, with important implications for all aspects of society. It is directly related to the sharp rise in life expectancy, and also stems from declining birth rates.
In the more developed countries, 23 percent of the population is already aged 60 years or over and that proportion is projected to reach 32 percent in 2050 and 34 percent in 2100. In developed countries, the number of elderly people has already surpassed the number of children (persons under age 15), and by 2050 the number of older persons in developed countries will be nearly twice the number of children; by 2100, that ratio will be closer to 2.2.
In developing countries as a whole, 9 percent of the population today is aged 60 years or over, but that proportion will more than double by 2050, reaching 19 percent that year, and triple by 2100, reaching 27 percent. This means that while ageing population is now typical of highly developed countries, it will soon be a major issue throughout the world.
Cognitive and motor disabilities caused by pathological brain lesions are a problem that often affects people over 50 years, and the risks increase with age. The causes frequently lie in cardiovascular diseases, which can lead to strokes. The risk of strokes increases with age, and 75 percent of all strokes affect people over 65. In addition, many young people between 18 and 30 suffer brain injuries as a result of traffic accidents.
The main application of soft pneumatic artificial muscles is in the neuromuscular rehabilitation of upper and lower limbs, in order to obtain a motor cortex recovery after brain strokes, ictus, muscle pathologies, etc.
All of this makes rehabilitation therapies necessary, both for trauma patients, for whom prolonged exercise may contribute to regaining total or partial muscle function, and for chronic patients for whom continual exercise prevents a general worsening.
As rehabilitation therapies and systems can differ widely and must be personalized for the individual patient, there is an enormous demand for physiotherapy and assistance by highly trained specialists. Rehabilitation treatments call for a direct relationship between patient and physiotherapist, and are carried at specialized centers that have their own organizational problems and high social costs.
One possible answer to these problems is to use robotized and automated equipment to provide assistance and perform rehabilitation. Such machines must meet the essential requirements of safety, high comfort, versatility and adaptability to individual situations. Satisfying these requirements calls for actuators that are safe, compact, lightweight and agile, and can be readily integrated in the system of which they are a part.
In general, pneumatic actuators exhibit all of these properties [2] and are to be preferred over electric actuators in biomechanical applications because of their ease of installation, low maintenance requirements, and the fact that they can also be operated without electrical signals of any kind, making them suitable for use in areas involving electromagnetic interference problems.
Among the many kinds of actuator that operate with compressed air, pneumatic artificial muscles are very interesting, as they are a type of soft actuator that can be readily integrated and adapted to rehabilitation equipment.
As when compressed air is supplied inside them a length reduction and a traction force are generated, the pneumatic artificial muscles, like human muscles, work in agonistic-antagonistic way, giving a traction force only. Agonistic-antagonistic way means a pneumatic muscles connection in order to move up or down human limb supplying one muscle or the other alternatively.
In fact, the moving up of the limb can be obtained from the muscle 1 contraction, for example, while the agonistic muscle 2 is relaxed. The moving down of the limb instead requires the opposite command, relaxing muscle 1 and supplying muscle 2.
These characteristics give back the pneumatic muscles appropriate applications in active exoskeletons and active suits for upper and lower limbs rehabilitations purpose.
In this paper, some interesting experimental results are presented, showing the main geometrical and technical characteristics of the prototypes analyzed.
2. Background
Soft pneumatic actuators are generally known as PAMs, or Pneumatic Artificial Muscles. They feature a number of geometric configurations that have been developed over the years.
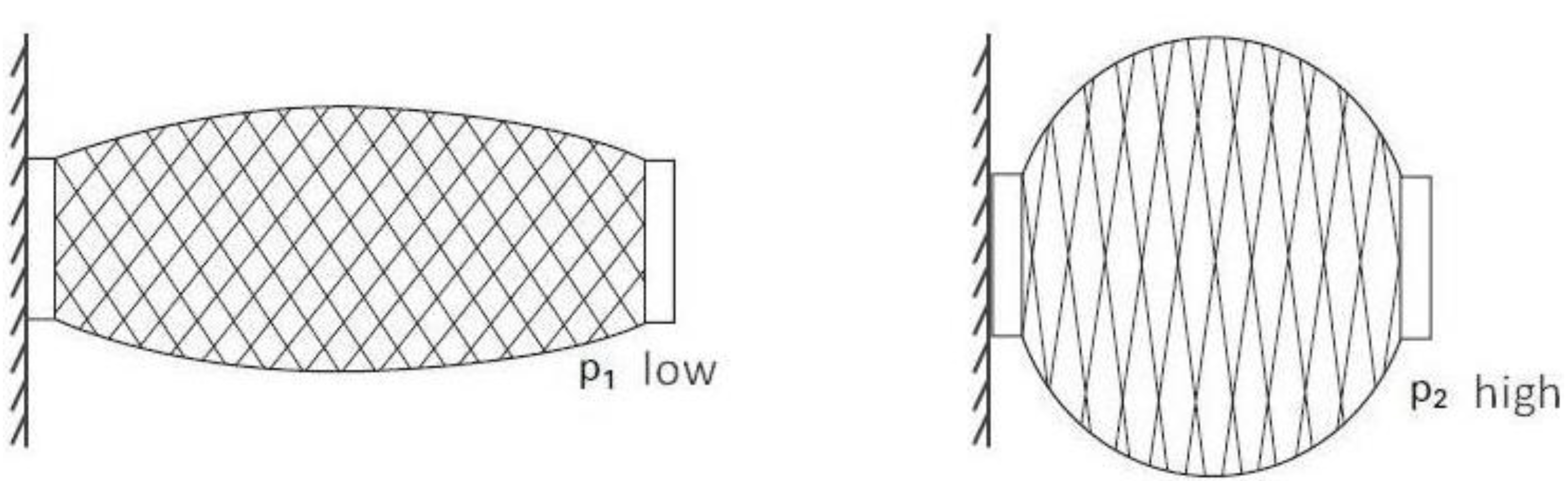
The first pneumatic muscle was patented by A.H. Morin in 1953 [3] and used textile threads encased in a cylindrical rubber tube. The most common muscles of this kind are known as McKibben muscles, taking their name from J.L. McKibben, who according to H.A. Baldwin [4] used them as orthotic actuators. The McKibben muscle has a simple structure, consisting of an internal elastic tube surrounded by a braided sleeve. The tube ensures gas-tightness during the deformation that occurs when the muscle is supplied with compressed air introduced in the tube, while the braid controls the tube’s expansion, permitting the radius to increase and thus produce an axial contraction. The actuator’s deformation is limited by the threads’ pitch angle and their density, as well as by the type of sleeve (e.g., braided or woven) (Figure 1).
Much work has gone into characterizing this type of muscle and improving its performance [5]. In 1986, Takeo Takagi and Yuji Sakaguchi proposed an actuator provided with a protective layer between the tubular body and the braided structure to prevent damage to the tube [6].
Figure 1.
McKibben muscle.
In 1988, Mirko Kukolj patented another approach for reducing the friction forces between the fibers of the sleeve [7]. As disclosed in the patent, an axially contractible actuator features a structure in which the fibers of the sleeve are knotted together in an open-meshed net. In this way, the active chamber of the PAM is in contact with the net only in the inflated condition and near the end of its stroke, which significantly reduces friction between the two structures. Another important feature of this actuator is that can be elongated by an external load applied at the ends, when the muscle is uninflated, thus producing a passive initial stretch.
Yet another type is the straight fiber muscle [8,9], which uses textile strands parallel to the muscle’s axis together with circumferential strands. These muscles can be constructed with a single chamber or as multi-lobed versions, in which case rigid circumferential rings are inserted between chambers. They exhibit a good contraction ratio.
Yarlott muscles (1972) consist of an elastomeric bladder netted by a series of cords that run axially from end to end [10]. When fully inflated, the muscle assumes a prolate spheroidal shape. Other variations in shape were introduced with hyperboloid muscles [11] and with multiple chamber muscles [12].
The pleated pneumatic artificial muscle developed by Daerden (1999) [13,14,15,16] is a membrane-rearranging actuator, meaning that the membrane’s surface is rearranged rather than stretched as it is inflated, and no material strain is involved. This actuator’s membrane has a number of lengthwise pleats which unfold when the muscle is inflated, allowing the membrane to expand and the actuator to contract. As a negligible fraction of the pressurized fluid’s energy is needed to expand the membrane, nearly all of the energy can be used for contraction. This actuator’s performance depends on the ratio of muscle length to radius.
In 2005, an artificial muscle was presented whose sheath of braided fibers is designed to be impregnated with liquid lubricants to reduce friction and abrasion between the elastic tube and the sheath. The study concludes that to eliminate friction forces, the tube and sheath structures should be joined to form a single composite material [17], as is the case in several models of commercial muscles.
Thanks to newly discovered synthetics and technological advances in the textile industry, new materials have been developed that can satisfy the need for new textiles and muscle types [18,19].
From the time the first pneumatic muscles were developed, rehabilitation equipment has always been regarded as an important application. Essentially, the pneumatic muscle is an actuator that can produce a force and perform work as it contracts, with an action similar to that of natural muscles. This suggests that these pneumatic actuators can be effectively used as substitutes for natural muscles. In particular they have been used for the actuation of robots that simulate human behavior [20,21,22].
There are, however, more significant reasons to use pneumatic muscles in rehabilitation, reasons associated with their operating performance. Like all pneumatic actuators, they are capable of metering the forces they generate in proportion to the pressure used, making it possible in practice to produce movements by overcoming the resistant forces or maintaining an equilibrium of forces. The inherent compliance of compressed gas system ensures that they can adapt readily to sudden changes in load, and dampen disturbance and vibrations. What is achieved is thus an actuation that adapts itself without excessive stresses and does not produce damage in the event of overloading that blocks the actuated system, perhaps reversing its movement. There can be no doubt that these characteristics are important in devices that come into direct contact with the human body, as equipment used to move upper or lower limbs.
Another important characteristic stems from the fact that the muscles’ end fittings can be simply constructed, without calling for particular geometric constraints. This makes it easier to install them in equipment where a certain degree of adaptability is required, in particular in rehabilitation apparatus. In addition, muscle construction is such that the resulting actuators are lightweight by comparison with the other types of motor (electric motors, for instance) that can produce the same forces, while pneumatic muscles also have a favorable power to weight ratio.
The general requirements for the muscles for rehabilitation equipment can be identified by reference to the kinematic movement required, to the type of application of the device, to the field of forces/torques necessary. From the kinematic point of view it is necessary to develop forces for linear movements or couples for angular movements. It is clear that it is possible, in general, to obtain both types of movements with the same actuator (linear or angular) using an appropriate mechanism. It is also clear that this need is likely to be more easily met with specialized actuators, of which some examples will be presented.
From the point of view of the type of application is possible to find some examples, which certainly do not exhaust the vast sector of rehabilitation equipment. Among these it may show:
- External devices applied to the upper and lower limbs (active exoskeletons);
- Active clothes driven by pneumatic devices;
- Inflatable bladders for massage.
The availability of smart fabrics with sensor functions and of lightweight, flexible soft pneumatic muscles has spurred the development of light, wearable actuation devices. Artificial muscles can thus be integrated in rehabilitation equipment based on typical robotics concepts, and can be used to control aids for the disabled (e.g., hands and upper and lower limbs) [23,24,25,26,27,28]. For wearable devices, the major considerations to be borne in mind to ensure that they cannot only be comfortable worn, but are also dependable and durable, are weight, power and deformability.
Integrating fabric-based pneumatic muscles in garments makes it possible to develop active pneumatic clothing capable of supporting disabled people and enabling them to do rehabilitation exercises in their own homes or workplaces without the direct assistance of physicians and physiotherapists [29].
The inflatable bladders for therapies with massage achieve a kind of distributed implementation to apply to the patient a variation in pressure from area to area and over time [30].
These different requirements have stimulated the study and development of soft pneumatic actuators specialized for different rehabilitation equipment. The following article will present several examples of actuators designed at Politecnico di Torino.
Regarding the magnitude of the forces, the muscles currently available on the market produces forces at the medium-to-high end of the range of forces produced by pneumatic actuators designed to operate in industrial settings. To meet the needs of other applications, several types of pneumatic muscles offering different levels of performance and characteristics not have been presented in recent years. All of this has benefited from the development of specialized high-performance textile products. The pneumatic muscles described subsequently develop forces in the range of medium-to-small.
3. Prototypes and Experimental Set-up
Certain types of soft actuator are particularly suitable for use in rehabilitation equipment, as they are effective in meeting the needs encountered in different applications.
These types are as follows:
- Textile Muscles, based on combining a deformable gas-tight tube and an anisotropic fabric. They are capable of producing small forces and can be readily integrated in clothing.
- Braided Fluidic Muscles, based on the use of high-strength net sheaths. They can produce medium/high forces.
- Large Deformation Actuators. Feature a special geometry and are used when large movements are necessary.
- Pressure Soft Actuators. Consist of multiple side-by-side chambers and are used to transmit pressure forces that differ from zone to zone.
For a number of years, the Politecnico di Torino Department of Mechanical and Aerospace Engineering (DIMEAS in its Italian acronym) has conducted research on soft pneumatic muscles which has led to the construction and testing of prototypes for each of the four types indicated above.
A pneumatic muscle is a contractile linear actuator which operates thanks to the pressure of the fluid in its interior. For all prototypes, it was thus necessary to construct devices with compressed air-tight chambers. In the first two cases (textile muscles and braided muscles), sealing was accomplished through mechanical interference, and components were assembled with a force-fit. For large deformation actuators and pressure soft actuators, the construction technique entailed adhesive bonding multi-layer fabrics to a sealing membrane [31].
In the case of textile muscles, the key element of the actuator is an orthotropic fabric whose two long edges are sewn together to form a tube [32,33]. The muscle’s latex inner layer is covered by the deformable outer fabric. The fabric’s placement and its orthotropic nature ensure that the muscle can deform, distributing the internal pressure uniformly and limiting the radial expansion of the elastic structure inside the fabric sheath. End fittings and sealing elements are used to assemble the parts and guarantee air tightness. The type of fabric used exhibits high compliance in the circumferential direction, permitting increases in diameter, as well as low axial compliance in order to produce a contraction when the diameter expands.
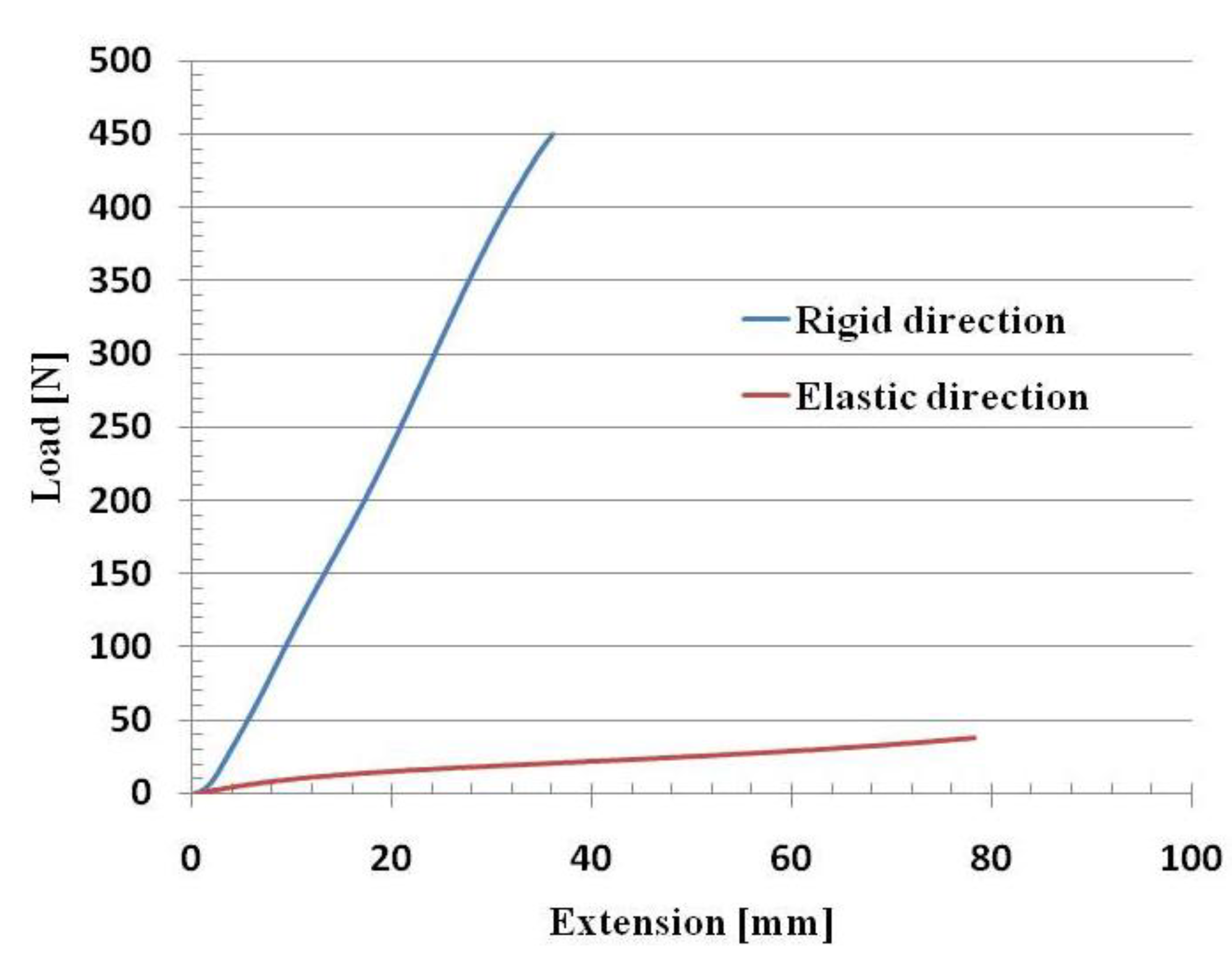
By way of example, Figure 2 shows the curves for two tensile tests carried out with a fabric subjected to traction along the two orthotropic directions. This is a trilaminate fabric, with two polyester outer layers and a polyurethane inner layer.
Figure 2.
Trilaminate fabric tensile tests.
Operating along the same principles as the McKibben muscle, the muscle contracts when it is inflated with compressed air: the higher the supply pressure, the more pronounced the muscle’s deformation will be.
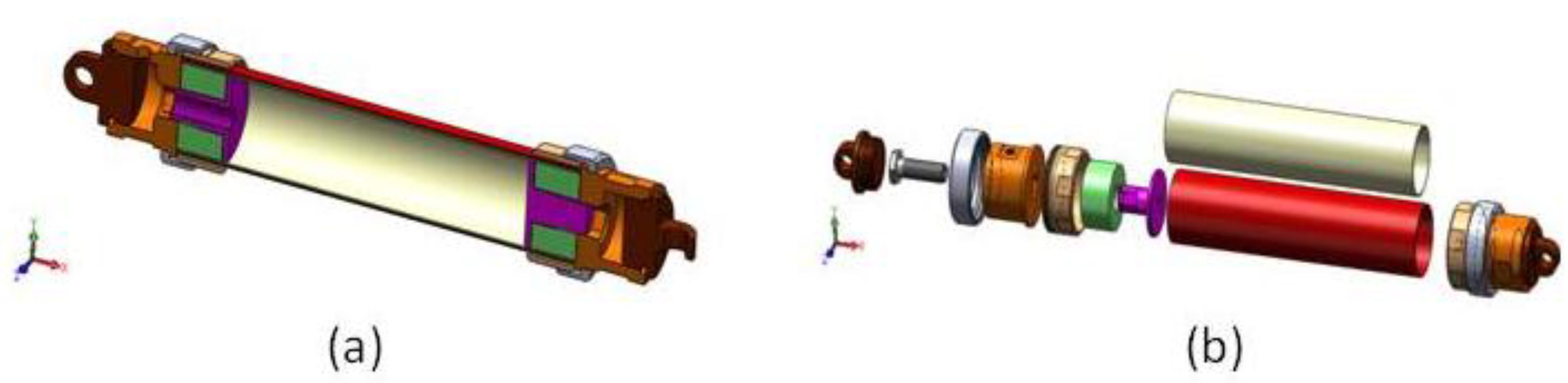
The muscle has two end fittings, viz., a front fitting with a supply port so that air can be introduced into the muscle, and a closed rear fitting. Between the end fittings, there is a layer of fabric (red) and a layer of latex (grey), which is needed to ensure that the air, once it has entered the tube, does not leak out (Figure 3).
Figure 3.
Structure of the DIMEAS pneumatic muscle: (a) geometrical model; (b) exploded view.
The double layer (fabric-latex) is secured to the two end fittings as follows: turning a screw inside an internally threaded plunger (purple) moves the latter against the seal (green), compressing it. The seal expands radially and pushes the double layer against the outer ring, securing it in place.
Several prototypes were constructed using different fabrics and geometrical dimensions (diameters and lengths).
Textile muscles can operate only at limited pressures if they are to remain within a stress range in which the fabric maintains its repeatability properties without damage. For any given size, the forces produced are lower than those than can be obtained with other pneumatic muscles.
A prototype pressurized during testing is shown in Figure 4, where the sewn seam in the fabric can be seen.
Figure 4.
Prototype of a DIMEAS textile pneumatic muscle during testing.

To produce muscles capable of contracting to an extent comparable to human muscles and of developing forces sufficient to move the patient’s limbs during rehabilitation, braided muscles were constructed and tested (Figure 5). These muscles’ structure is similar to that illustrated above for textile muscles, except that that outer fabric sheath is replaced with a braided sleeve consisting of continuous filament para-aramid yarns.
Figure 5.
Prototype of a DIMEAS braided pneumatic muscle.

The sleeves were produced on rope braiding machines, using a type of weave that provides the sleeve with good radial deformability. Unlike the orthotropic fabrics used for the muscles in the first group, what makes these sleeves suitable for this type of application is the way the yarns are woven. Muscle contraction, which in the first group took place thanks to the fabric tube’s combination of axial stiffness and radial elasticity, is now guaranteed by the braid angle between the longitudinal axis of the tube and the yarn from which the sleeve is woven. When the chamber is pressurized, the fabric’s axial stiffness tends to shorten the muscle.
This type of sleeve has a smooth, uniform surface and eliminates the problem of the seam in the orthotropic fabric tube.
Large deformation actuators are employed in applications where long strokes are needed and the actuators must occupy a limited space when at rest, or when large angular movements are desired. All of this calls for particular forms, such as a bellows configuration [34] (Figure 6) or multiple bladders (Figure 7).
Figure 6.
DIMEAS bellows type pneumatic muscle: (a) cross section during actuator work; (b) cross section at rest; (c) pressurized actuator.
Figure 6.
DIMEAS bellows type pneumatic muscle: (a) cross section during actuator work; (b) cross section at rest; (c) pressurized actuator.
Figure 7.
Worm actuator prototype.

Figure 6a shows a cross sectional view of a bellows muscle during work, while Figure 6b shows the muscle at rest and Figure 6c is a photograph of the pressurized actuator. The muscle consist of four identical chambers, with a modular structure. Rigid disks are adhesive bonded to both ends of the muscle in order to connect it with the external components. Construction features an assembly of six circular rings and two further circular disks consisting entirely of fabric for the end sections. Rings and disks are cut from a sheet of trilaminate fabric with two outer polyester layers and an inner membrane, also consisting of polyester, which prevents compressed air leakage when the muscle is inflated. Rings and disks are bonded together along 10 mm wide annular sections.
In the prototype shown in the figure, the rings’ at-rest outside diameter is 80 mm. The diameter of the thrust section, which corresponds to the diameter of a rigid end disk, is 35 mm. This type of construction results in an extremely lightweight and compact component, and ensures that a well-defined geometry is maintained both when the muscle is supplied with compressed air and when it is connected to a vacuum pump.
Figure 7 is a photograph of a prototype worm actuator, with multiple bladder elements connected in series and capable of closing on themselves. The prototype is constructed of multilayer fabric with internal membranes to ensure air tightness, using an adhesive bonding technique to join the fabric layers. The configuration is that of a series of plates or inflatable cushions that are flattened together when closed. An arrangement of rubber elements connected to the plates produces a force that tends to contract and close the muscle, whereas inflating the plates with compressed air tends to open and extend the muscle.
Pressure soft actuators consist of several partially overlapping chambers which press against the body to which they are applied. Actuators of this kind are used to construct inflatable compression sleeves for air pressure therapy. The arrangement of the chambers must be such as to ensure a gradual increase in the pressure in each section, creating a pressure wave effect. This type of therapy is particularly useful in producing effective lymphatic drainage and correcting interstitial fluid retention.
Several prototypes were constructed, overlapping each chamber by 40% over the preceding chamber. This percentage overlap was selected in order to achieve uniformity and continuity in the pressure exerted on the arm, so that areas of fluid build-up do not occur between one chamber and the next. Prototypes were constructed by bonding air-tight multilayer fabrics whose compliance differs according to the geometric position in which the fabric layer in question is located. Figure 8 shows a prototype inflatable compression sleeve developed at the Politecnico di Torino Department of Mechanical and Aerospace Engineering.
Figure 8.
Prototype inflatable compression sleeve.

All textile muscle, braided muscle and large deformation actuator prototypes were tested to compare performance during contraction or expansion while varying muscle supply pressure and applied loads. For the pressure soft actuators, tests were carried out while generating pressure cycles is successive chambers.
The test bench shown in Figure 9 was developed to carry out tests that connect the three working parameters (supply pressure, change in length, applied loads), and can be adapted for each type of test through a simple variation in configuration. Each test is conducted by maintaining one of the three parameters constant and determining the relationship between the other two. Specifically, tests were carried out to determine the change in length occurring while varying pressure (with constant applied load), and the change in the force produced by the muscle while varying pressure, with the muscle blocked at a constant length.
Figure 9.
Test bench: (a) configuration for length-pressure tests; (b) configuration for force-pressure tests.
Figure 9.
Test bench: (a) configuration for length-pressure tests; (b) configuration for force-pressure tests.
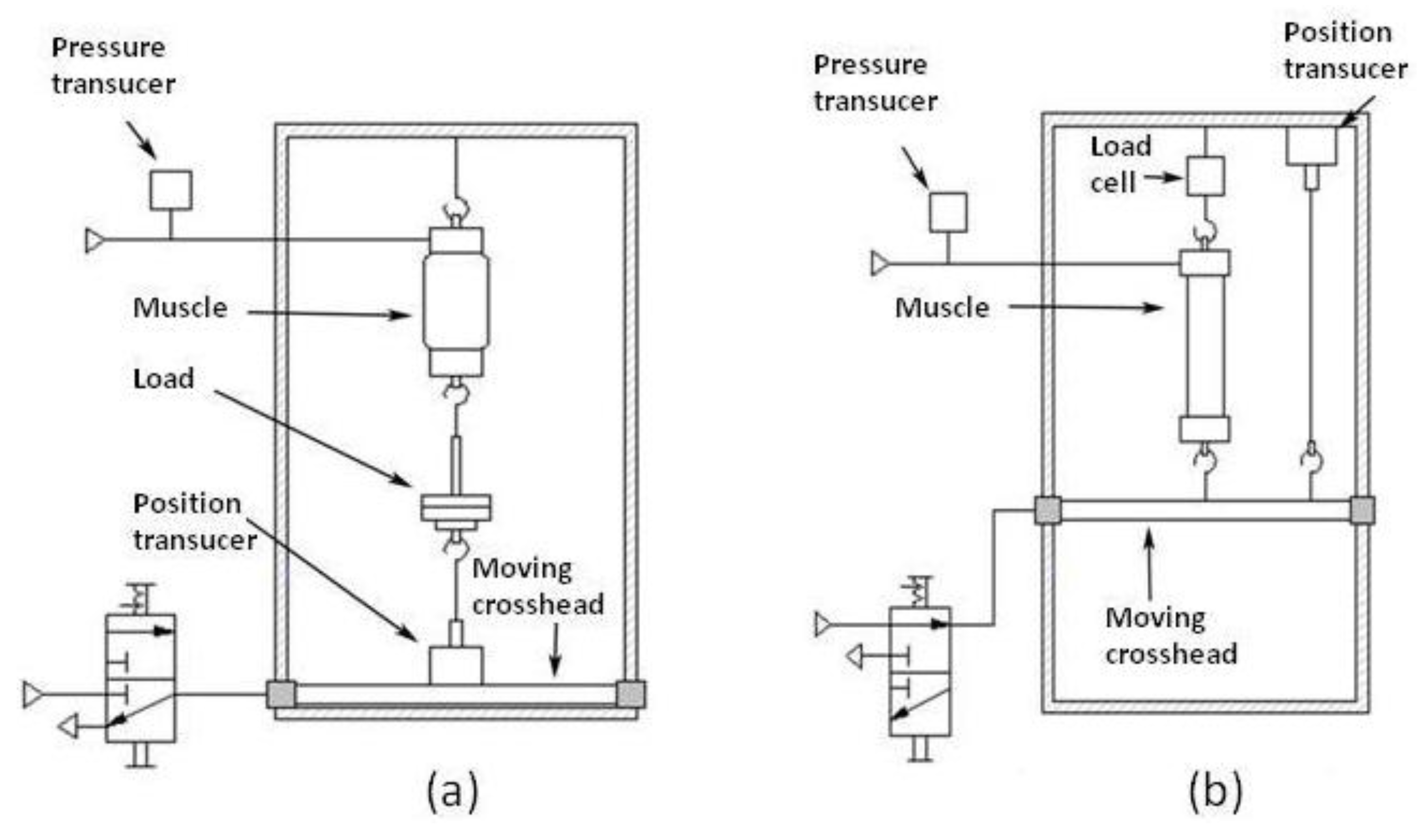
The test bench consists of a stationary structure designed so that the pneumatic muscle can be installed vertically. It is attached by means of an eyebolt on the frame’s top crossmember. A load cell (UU-K20) can be installed between the top crossmember and the muscle under test. A mobile crossmember is installed horizontally between the stationary structure’s two uprights, and is provided with a pair of profiled rollers so that it can be moved up and down. The crossmember can be blocked at any height needed for the type of test concerned by means of four pneumatic clamping cylinders.
Supply pressure is regulated via a manually operated pressure reducer with gauge located on a control panel. The supply line is provided with a pressure transducer (AST4000-A-00200-P-1-A-0) whereby the pressure value can be acquired. A position transducer (PT1DC-30-UP-Z10-MC4-SG) is used to determine the change in the length of the muscle, which is connected in different ways depending on the type of test. The transducers are supplied by a 24 VDC power supply, and send signals via BNC cables to a connection block with 16 analog inputs. The block is connected in turn to the acquisition card which, using LabVIEW software, makes it possible to acquire, process and view the data collected by the transducers.
For the pressure-length tests, the mobile crossmember was placed at the lower area of the test rig and the position transducer was installed on it. The muscle was then positioned on the rig, attaching the upper end fitting to the stationary crossmember and the lower end fitting to the position transducer or, if a load is applied, to a carrier plate, which is in turn connected to the transducer cable (Figure 9a).
The test procedure is as follows. Once the muscle is installed, a constant load is applied by placing weights on the carrier plate. The initial length of the muscle is then determined. The change in length that occurs as supply pressure is increased is measured; for the sake of completeness, the length-pressure curve is plotted both while increasing and while reducing pressure.
For the tests measuring the change in force while varying pressure with muscle length constant, the modified test layout shown in Figure 9b was used. To measure the force developed by the pneumatic muscle, the load cell was installed on the top crossmember. The actuator was then positioned on the rig, attaching the upper end fitting to the load cell and the lower end fitting to the mobile crossmember. So that an increase in force can be recorded immediately, the mobile crossmember must be blocked as soon as compressed air enters the muscle. This is accomplished by pressurizing the four brake actuation cylinders at a height such as to prevent play between the hooks and eyebolts on the end fittings, and taking care not to produce excessive pretensioning on the muscle under test.
The position transducer was installed flush on the top crossmember in order to detect any movements of the mobile crossmember, while the pressure transducer on the supply line was used to measure muscle supply pressure.
Test were carried out with the muscle blocked, increasing pressure and recording the resulting change in force. Here again, the curve is plotted both while increasing and while reducing pressure.
4. Results
The performance of pneumatic muscles while varying their working parameters (supply pressure, load and deformation) can be analyzed with different tests carried out on the rig described above. As indicated earlier, each of the three parameters in turn is maintained constant during testing. One of the two remaining parameters is then varied, and the change in the third parameter that occurs when varying the second is recorded.
The most significant tests for pneumatic muscles are the length-pressure test and the force-pressure test.
For all types of pneumatic muscle, an important performance parameter is percentage change in length ΔL%, defined as
![Actuators 03 00084 i001]() where L is the generic length and Li is the initial length. Bearing in mind that some muscles contract and others extend, this parameter can in general be considered in absolute value.
where L is the generic length and Li is the initial length. Bearing in mind that some muscles contract and others extend, this parameter can in general be considered in absolute value.
Typical results obtained with the different muscle types are described and analyzed below.
4.1. Textile Muscles
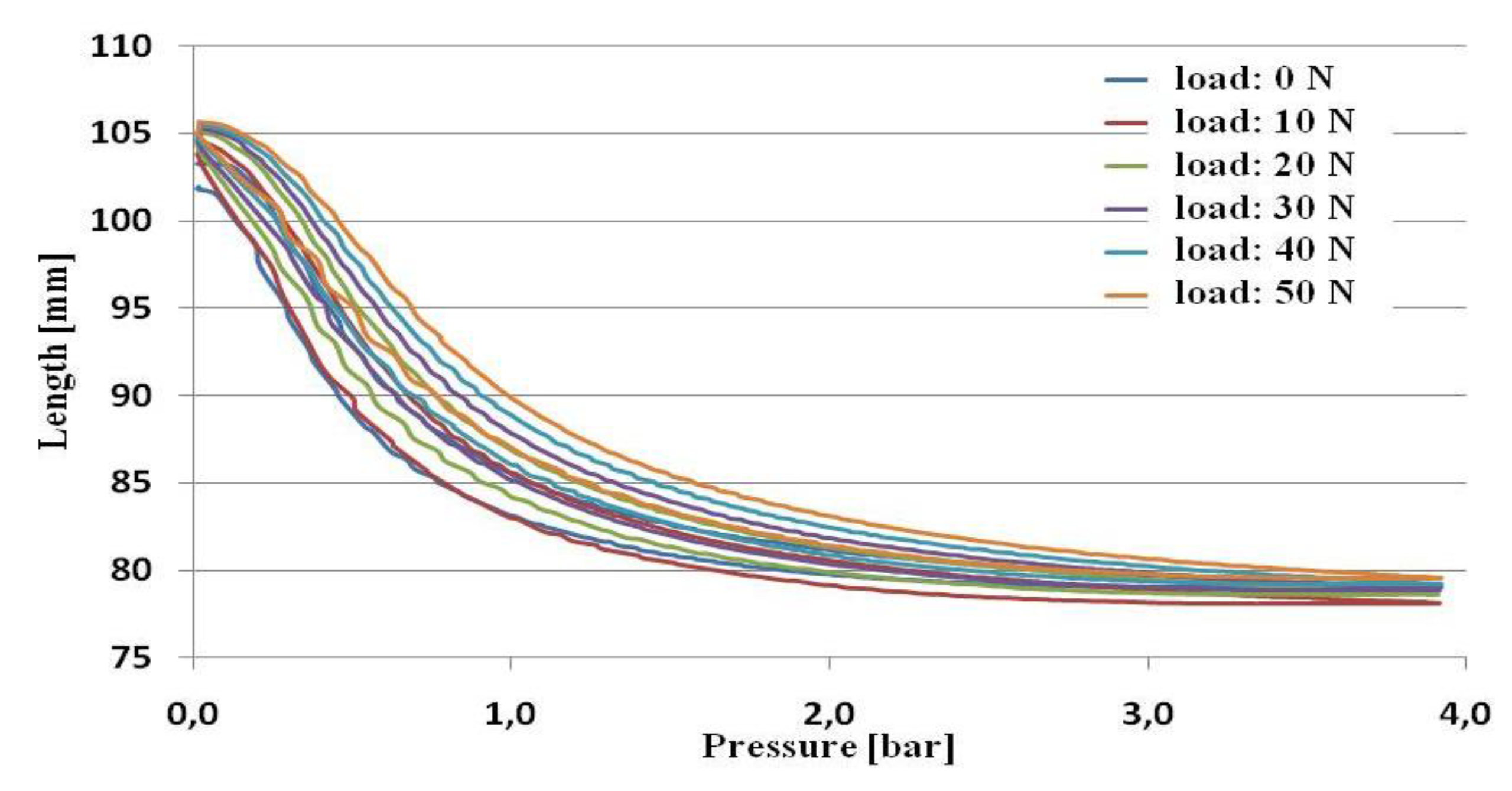
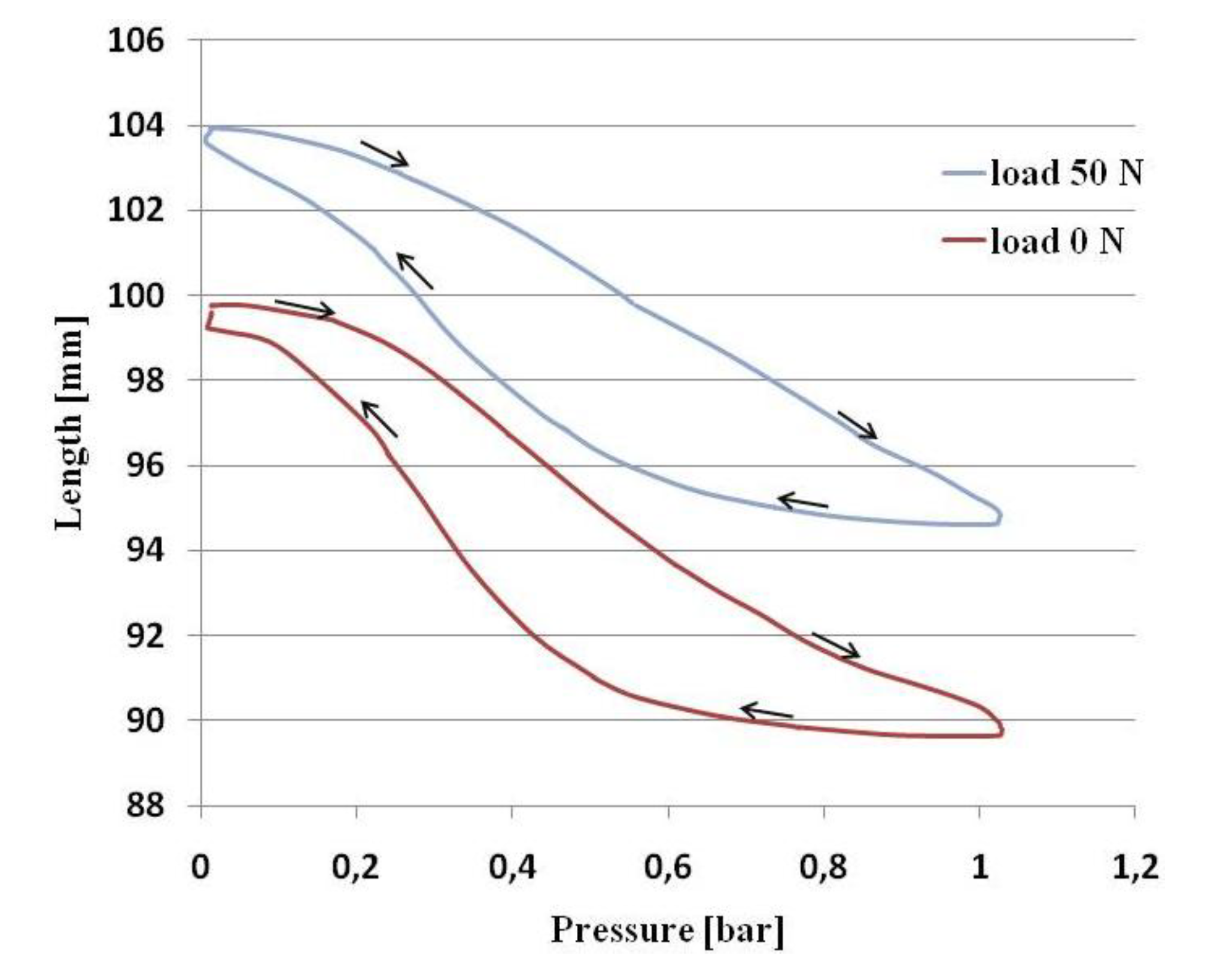
Figure 10 shows an example of a test where muscle length is plotted versus the change in relative supply pressure (expressed in bar, where 1 bar = 105 Pa) at different applied loads for a muscle consisting of a trilaminate fabric and having an inside diameter of 28 mm and a latex tube thickness of 1 mm. The two curves were obtained with a constant load on the muscle of 0 and 50 N respectively. Applied pressure was first increased and then decreased.
In general, the curves that were obtained indicate that in each stress cycle, muscle shortening increases as shown by the upper line (contraction stage) as pressure rises, while as pressure drops, the muscle extends as shown by the lower line (relaxation stage).
The upper and lower lines do not coincide; the cycle area is not zero and hysteresis is exhibited. This hysteresis can be attributed in part to the latex tube’s plastic deformation, but is chiefly due to friction phenomena between the inner tube and the outer membrane and between the threads of outer fabric layer, which rub together as the muscle deforms.
Figure 10.
Length-pressure tests on a textile muscle.

In addition, these phenomena introduce a threshold value for the supply pressure, which must be passed before the muscle can begin to deform radially and contract. The upper curve has an initial portion with zero slope. This portion is shorter in the curves for muscles containing thinner latex tubes, and longer in the curves for muscles containing thicker latex tubes.
The muscle begins to deform as soon as supply pressure tops the threshold value, but as the pressure rises, the curve for the contraction stage tends to gradually reduce its slope towards an asymptotic value.
The curve for the relaxation stage also has an initial portion whose slope is almost zero. When pressure drops below a certain value, the muscle starts to extend and returns to its initial length.
The two curves shown here start from different initial muscle lengths, depending on the load: the zero-load curve starts with the muscle at a nominal initial length (100 mm), while the curve plotted with a 50 N load starts from a longer length because of the muscle’s initial stretch. The percentage contraction at any given supply pressure is practically the same.
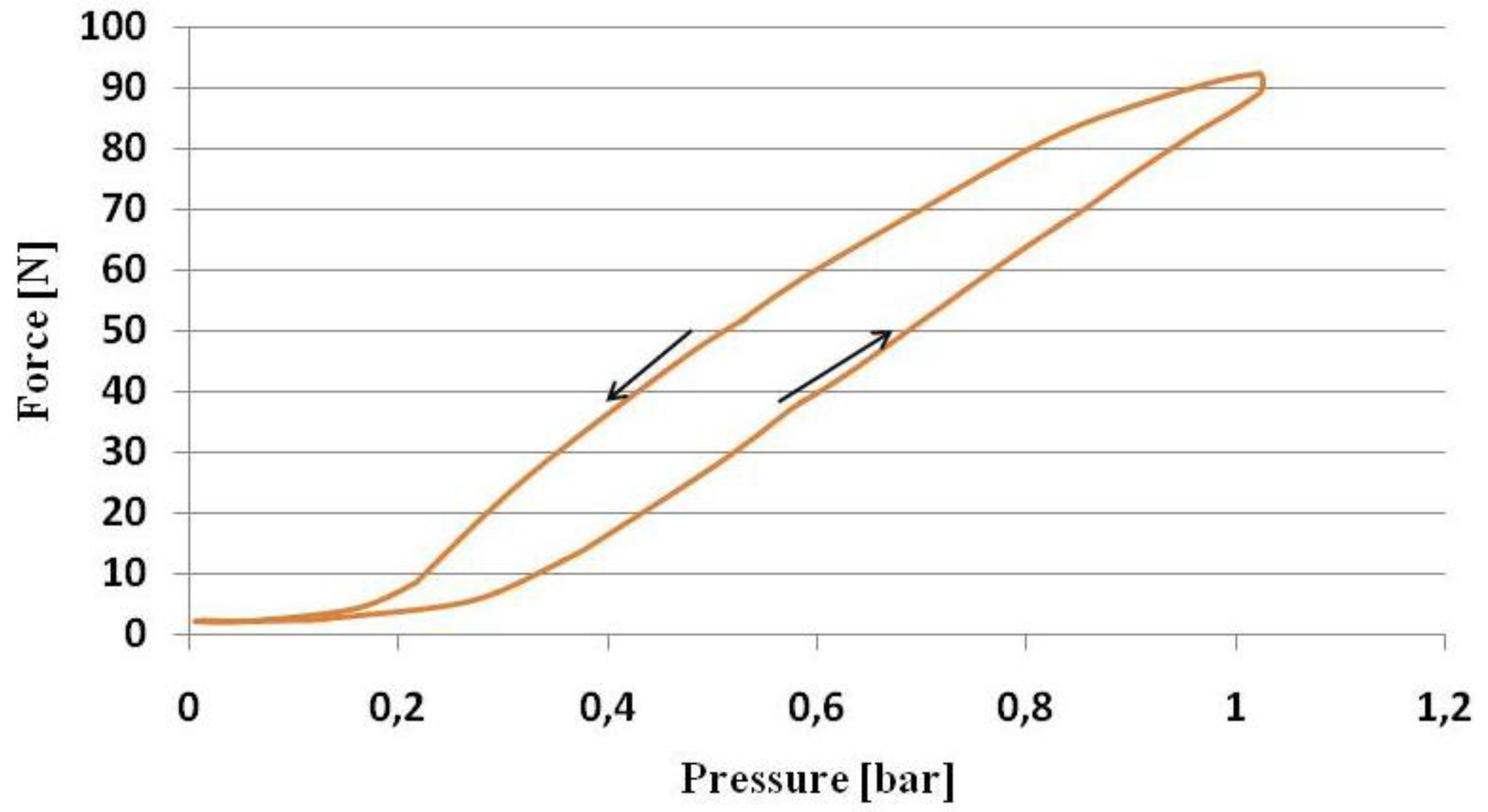
Figure 11.
Force-pressure tests on a textile muscle.
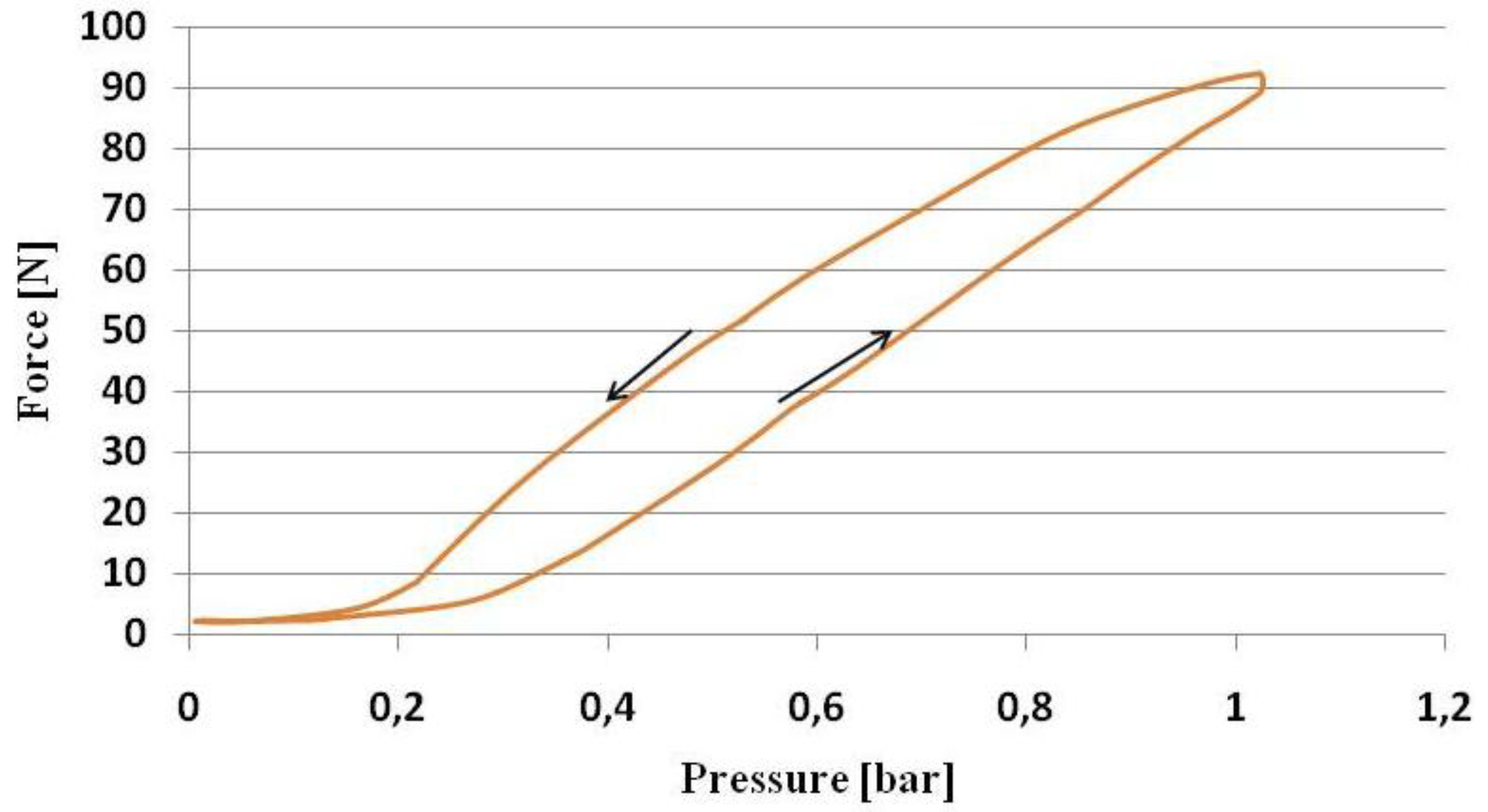
By way of example, Figure 11 shows a curve for developed force versus applied pressure. The test layout illustrated in Figure 9b was used for these curves. As can be seen, the curves start with a portion having zero slope, so that until a threshold value is passed, the muscle will not be under tension.
The active phase of the curve, where force increases along with supply pressure, is linear. During the phase in which pressure drops, the muscle exhibits hysteresis for the same reasons indicated in connection with the length-pressure curves.
An overall analysis of the tests indicates that these muscles are suitable for their function, but have a limited percentage change in length corresponding to a 10%–15% contraction, and a certain hysteresis. It should also be noted that they can be used with flat end fittings and are thus easily connected to textiles.
4.2. Braided Fluid Muscles
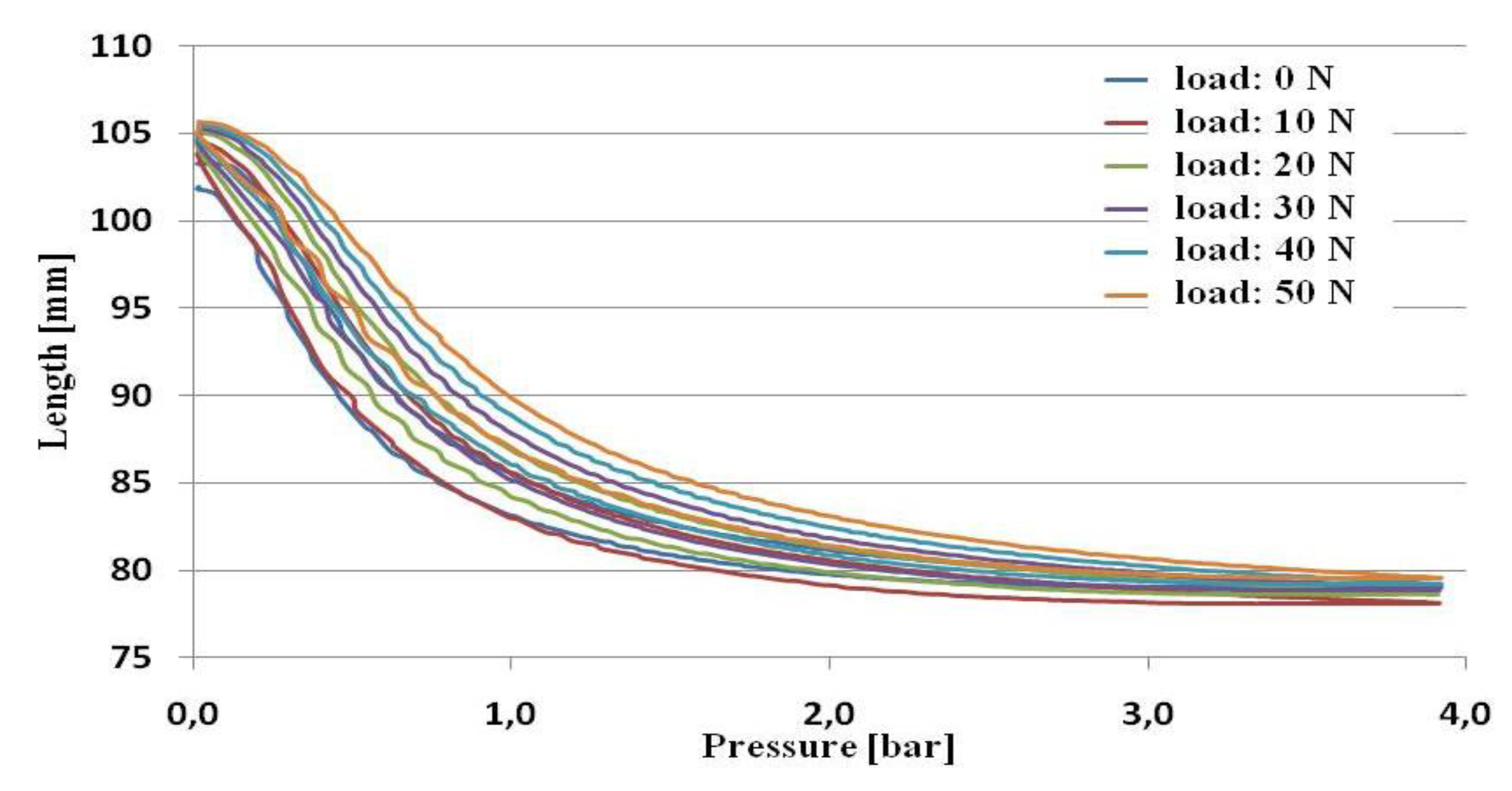
Figure 12 shows curves for muscle elongation versus change in applied pressure for a para-aramid muscle with 28 mm inside diameter and 1 mm thick latex tube. Curves were plotted while applying axial loads from 0 to 50 N.
Figure 12.
Length-pressure tests on a para-aramid muscle.
By comparison with the curves obtained for textile muscles, the operating pressure range is much wider (up to 4 bar) because of braided muscles’ higher strength. The hysteresis exhibited by the curves plotted while increasing and decreasing pressure is lower, and practically negligible, while all curves start essentially from the same length, indicating that the muscles’ behavior is fairly independent of the applied load.
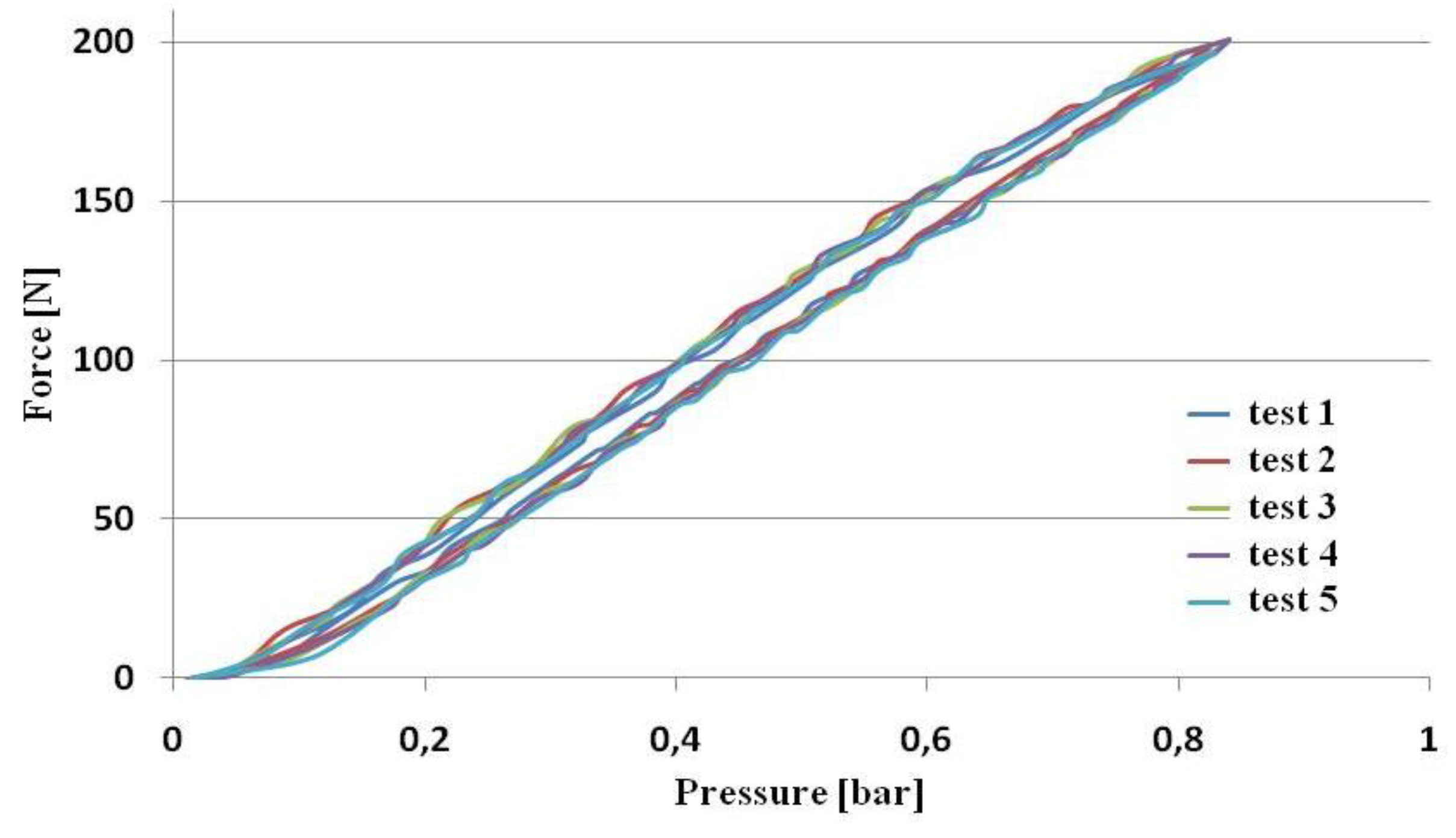
Figure 13 shows five repeated curves for the force developed while varying applied pressure. Behavior is sufficiently close to linear, with low hysteresis and good repeatability.
Braided muscles were tested on the same rig used for textile muscles.
For this type of actuator, contractions of 25% and more are reached, and the force range is comparable with that needed, for example, to flex the forearm: 30N–100N. This makes the pneumatic muscle in question suitable for biomedical applications in rehabilitation.
Figure 13.
Force-pressure tests on a para-aramid muscle.

4.3. Large Deformation Actuators
These actuators operate by increasing their length, rather than shortening it, when they are inflated. Their performance can be analyzed with reference to the curves showing elongation ΔL versus applied external load, with constant supply pressure.
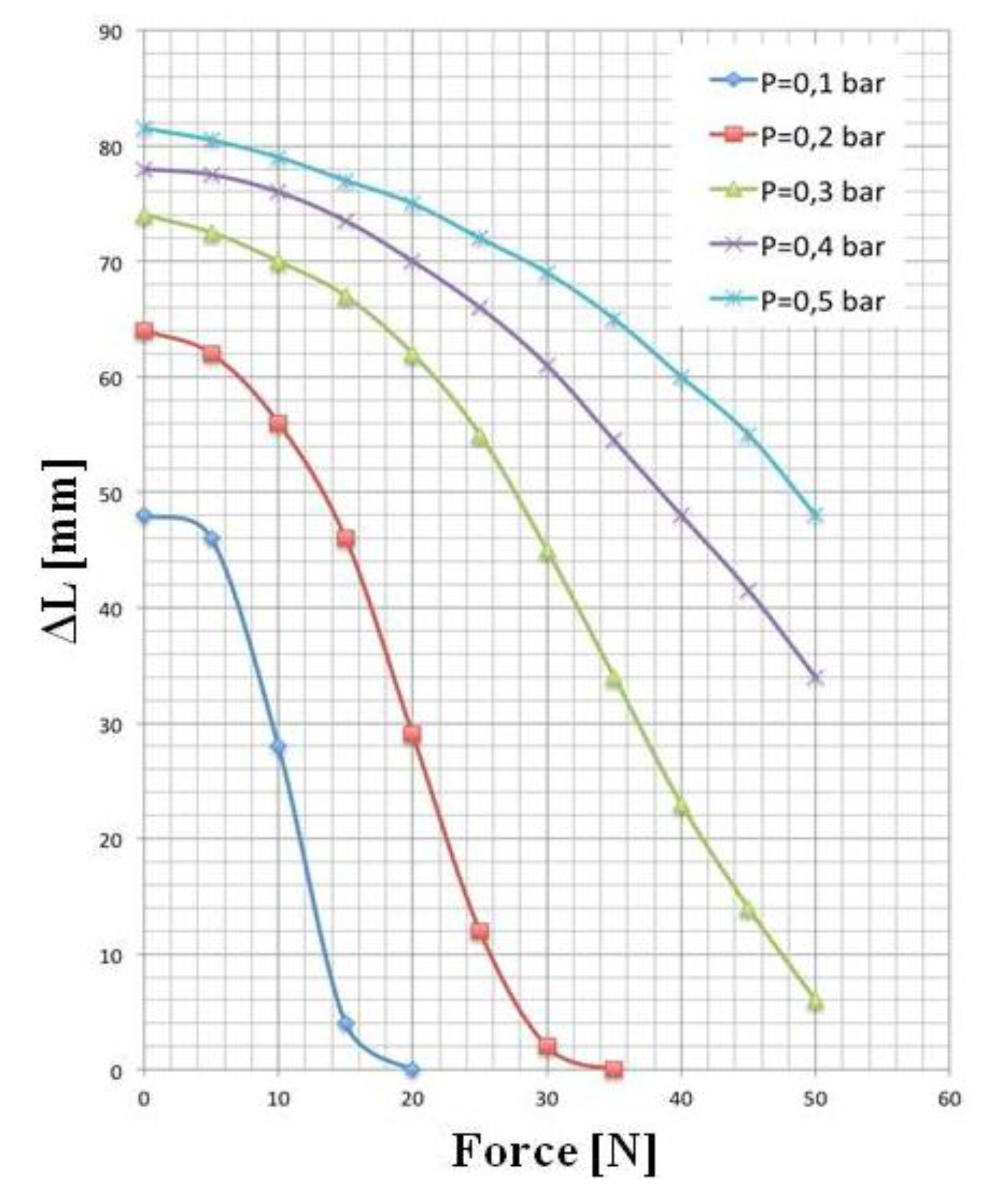
Figure 14 shows curves of this kind, with elongation ΔL plotted versus the external compressive force, with constant supply pressure, for a bellows muscle of the same type illustrated in Figure 6. Five curves are given for pressures from 0.1 to 0.5 bar. Tests were once again carried out on the same test rig, with the bellows muscle secured to the top crossmember. A compressive force was applied to the mobile crossmember by hanging weights on a relay cable.
Figure 14.
Force-elongation tests on a bellows muscle.

Under no-load conditions (without applying the compressive force) this actuator shows significant deformation from its initial contracted length. Elongation increases as the pressure rises, though the rate of elongation increase drops at higher pressures. When a compressive force is applied, elongation decreases and reaches zero when the applied force equals the pressure thrust.
This muscle showed itself to be compact and solid in all tests, and exhibited a variety of excellent operating qualities: a particularly lightweight finished structure, a noteworthy capacity for extension, which can be up to around 900% of the length at rest, and resistance to external loads in the order of 40 N, which is far higher than the muscle’s overall mass.
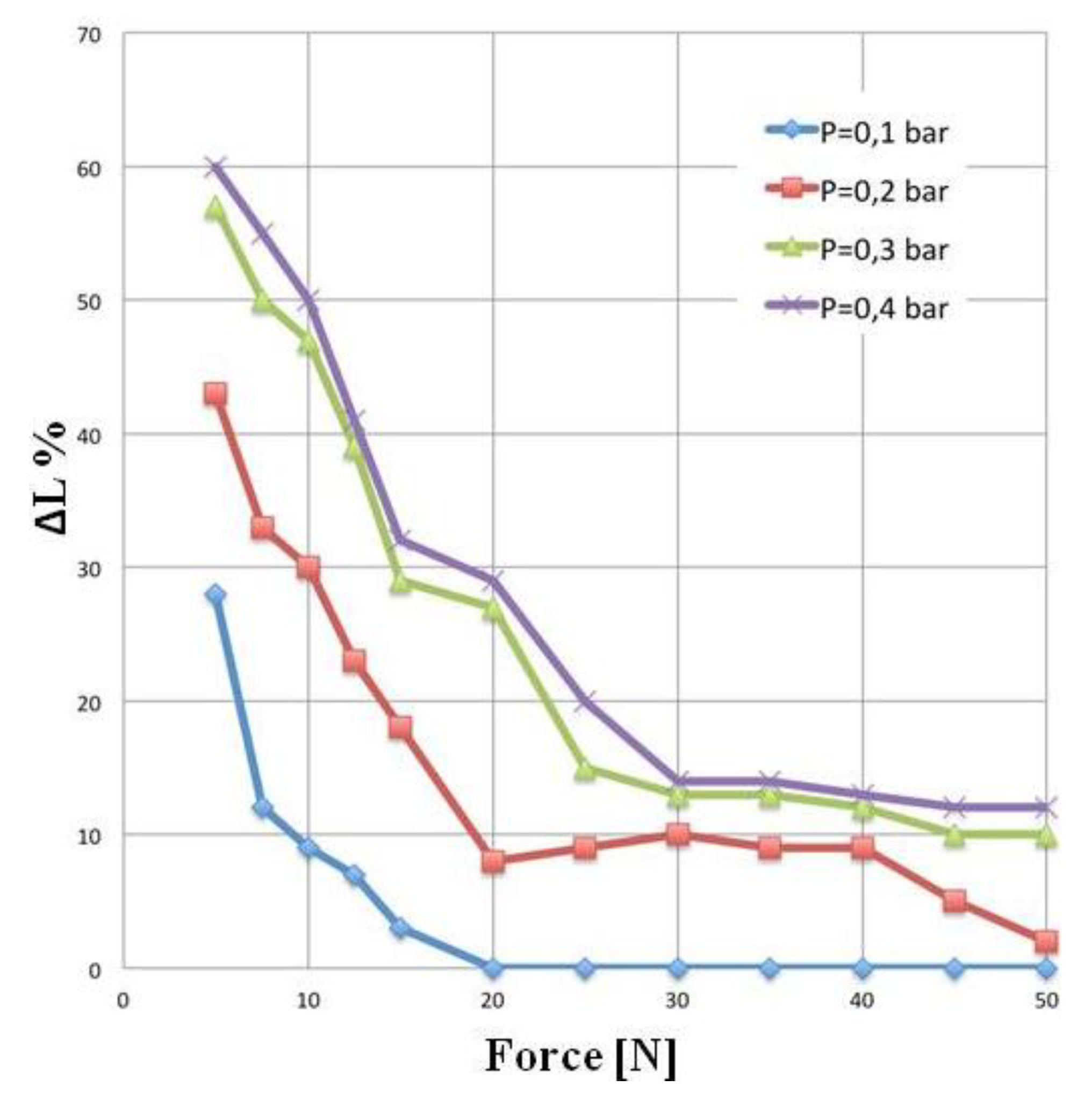
For a worm muscle, Figure 15 shows curves for percentage elongation ΔL% versus external applied load, with constant supply pressure. The four curves are plotted for supply pressures of 0.1, 0.2, 0,3 and 0.4 bar respectively. Behavior is similar to that of the bellows muscle, with elongation decreasing as the external applied load is increased.
Figure 15.
Force-% elongation tests on a worm muscle.
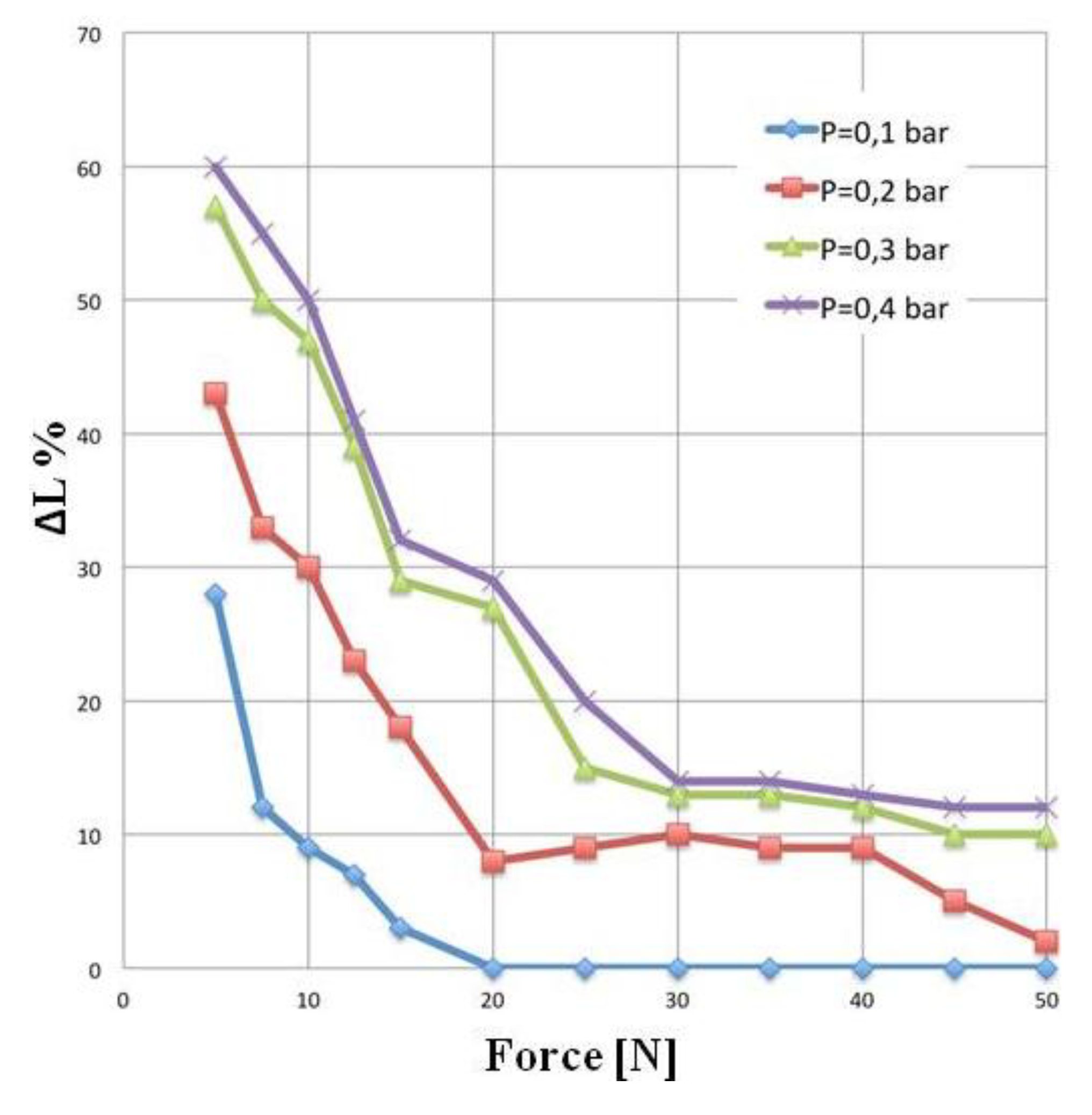
The worm muscle is more sensitive to load than the bellows muscle. With a supply pressure of 0.4 bar and 10 N load, for example, percentage elongation ΔL% is 50 with the worm muscle, and 760 with the bellows muscle shown in Figure 14.
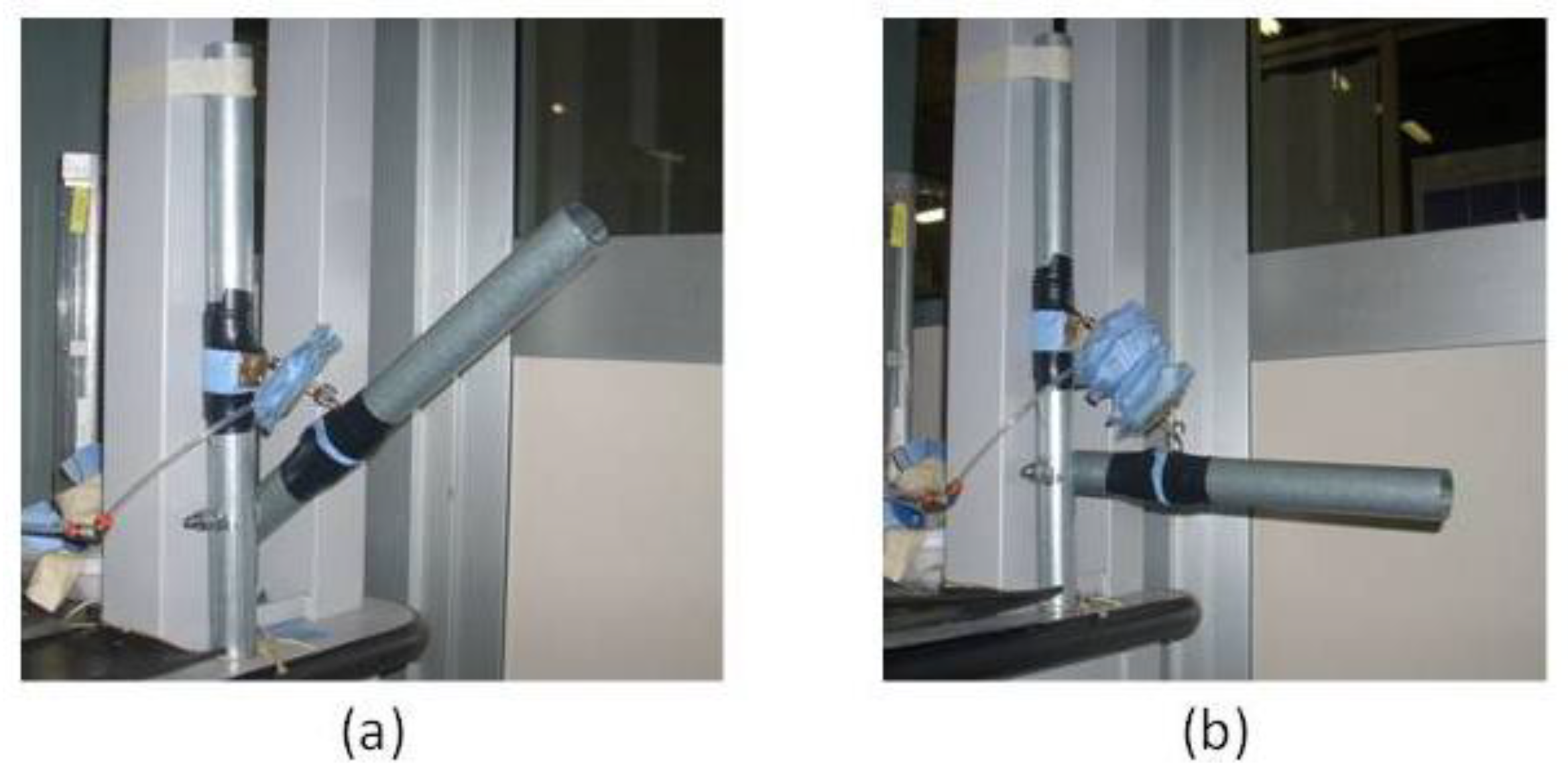
Several experimental tests on the bellows muscle demonstrated its suitability for use in rehabilitation equipment. Valid results were obtained both during the thrust phase with the muscle supplied with compressed air, and in traction, where a vacuum ejector was used where necessary to reduce internal pressure to values below atmospheric pressure.
Flexing tests on a mechanical arm starting from a position of 90° and of 180° showed that a single muscle or two muscles installed in series can ensure rotation angles that are absolutely compatible with requirements.
Figure 16 a,b show an example of muscle application on an arm simulator. Rotation angles from 0° to approximately 120° were obtained on the prototype, with the pneumatic muscle producing a linear stroke of around 100 mm and supply pressures not exceeding 0.4 bar.
Figure 16.
Application of a bellows muscle to an arm simulator: (a) bellows muscle w/o supply; (b) pressurized bellows muscle.
Figure 16.
Application of a bellows muscle to an arm simulator: (a) bellows muscle w/o supply; (b) pressurized bellows muscle.

4.4. Pressure Soft Actuators
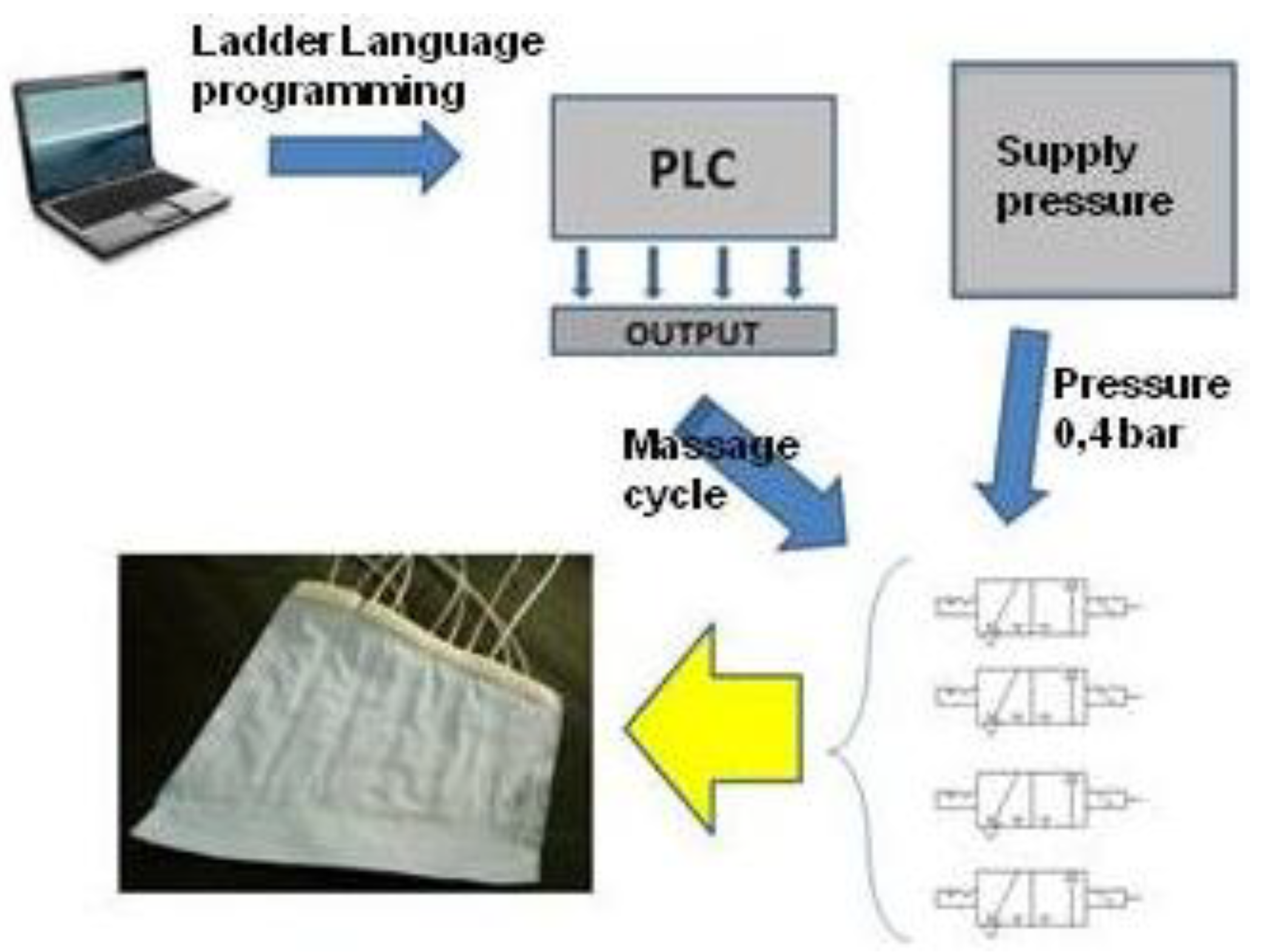
In the case of pressure soft actuators, the prototypes were found to be suitable for producing pressure waves that create a massage effect. Operation is via a series of successive commands imparted to solenoid valves controlled by a PLC. A schematic view of the system is shown in Figure 17.
Figure 17.
Operating schematics for an inflatable compression sleeve.

The operating cycle consists of two stages for each chamber. In the first stage, compressed air from a generator enters the chamber, causing the chamber to expand and extending the elastic walls; in the second stage, the compressed air exits the chamber, reducing its volume so that the elastic walls relax.
This alternating extension and relaxation of the air chambers’ elastic walls produces a massage effect on the compression sleeve wearer’s limbs. Appropriate regulation of each individual chamber’s expansion and contraction stages can guarantee different massage effects on the wearer, as well as promoting blood circulation.
5. Discussion
The main features of the pneumatic muscles prototypes made at Politecnico di Torino and presented in this paper are shown in Table 1. In particular, the geometric characteristics, the materials used, the advantages and limits, the possible applications are indicated for each type of muscle.
In particular, Braided fluid muscles are built with para-aramid fibers and bores 28 mm, 19 mm, 13 mm—length 100 mm. Prototypes with different bores have been manufactured in order to test various geometries, generally used with a maximum supply pressure equal to 4 bar relative pressure. Experimental results are good as the load moved is about 50 N. In particular, this fabric improve the preliminary textile muscles solution.
In this phase of the study, a comparison between the data of these prototypes with those of muscles present in the literature [35,36] does not appear possible, because of the significant dimensional differences. A purely qualitative comparison seems to indicate that the DIMEAS prototypes have comparable contractions and produce lower forces.
An adequate comparison can be made with the muscles of a commercial nature, for which the available data are complete and can be used directly. The comparison is done to muscles that have a similar diameter. A first example of comparison is made between the DIMEAS muscle of 19 mm diameter and the [37] fluidic muscle of 20 mm diameter. With nominal length (muscle blocked and null contraction) and a pressure of 2 bar, [37] muscle develops a force of about 570 N while the DIMEAS prototype reaches about 250 N. In the case of [37] muscle, strength is completely exhausted with 15% contraction, while the DIMEAS prototype still develops a force of about 70 N. The muscle [37], which has a structure different from that of the braided muscle, is strongly oriented towards industrial application, with high strength and reduced ability of contraction. The DIMEAS prototype is aimed at the realization of exoskeletons, has a good ability of contraction and requires smaller forces.
The comparison between the DIMEAS prototype of 28 mm diameter and the model S30AM-S-1 [38] shows a good similarity of behavior. Both work in similar range of pressures (0–4 bar DIMEAS, 0–3.5 [38]). Within this range, the forces are comparable and the contractions of the DIMEAS prototype are lower by about 50% (with 2 bar of supply the contraction is 21% versus 33%, to 3.5 bar the contraction is 25% versus 37%).
Comparing the braided DIMEAS prototypes with different types of muscle, such as the PPAM (Pleated Pneumatic Artificial Muscles) [16], for the same geometric dimensions and working pressures, the PPAM provide forces and contractions higher.
Overall, bellows actuators prototypes were constructed both in laboratory and with industrial manufacturing. Experimental results are good and show a possible suitable application of this geometry as artificial muscle applied between the humerus and forearm for its movement.
The worm actuator is quite good, but its construction is more difficult than the others, gives too much encumbrance and requires a vacuum pump for its contraction, while the following extension is due to elastic parts.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Muscles Type | Prototypes Characteristics | Advantages | Limits | Applications | |
|---|---|---|---|---|---|
| Geometry | Materials | ||||
| Textile muscles | Cylinder bore: 28 mm Length: 100 mm | External layer: trilaminate fabric, with two polyester outer layers and a polyurethane inner layer; Inner layer: latex | Easily connected to textiles: they can be used with flat end fittings | Operating pressure range: 1 bar; not negligible hysteresis; contractions of 10%–15% | Biomedical applications in rehabilitation |
| Braided fluid muscles (McKibben type) | Cylinder bore: 28 mm Length: 100 mm | External layer: para-aramid fibers; Inner layer: latex | Operating pressure range: up to 4 bar; Higher strength; Negligible hysteresis; Behavior independent of the applied load; Contractions of 25%; Easily connected to textiles: they can be used with flat end fittings | Biomedical applications in rehabilitation | |
| Large deformation actuators: Bellows | Outside diameter: 80 mm; Coil: 4 | Trilaminate fabric with polyester layers | Lightweight; Compact; Easy to handle; Large elongations | Possible misalignments in elongation phase | Movement of upper limbs |
| Large deformation actuators: Worm | Chamber: 80 × 80 mm; Number of chambers: 6 | Trilaminate fabric with polyester layers | Lightweight; Compact; Easy to handle; Large elongations | Low forces | Mini robot |
In Table 1, the pressure soft actuators, here analyzed as pneumatic massage sleeves, are not indicated. In fact, this geometry still requires a deeper study on its assembly technique as sewing is not admitted, because needle destroys the impenetrable textile membrane. Furthermore, the here superimposed pneumatic bags allow a glue assembly technique only, as sewing cannot build multilayer airtightness chambers.
6. Conclusions
Experimental innovative soft actuators are here presented, consisting of various types of pneumatic muscles developed for the human upper or lower limbs movement. The movements produced are primarily linear, while angular movements can be obtained by means of appropriate muscles linkage points. These experimental geometries show various possible solutions for upper limbs rehabilitation.
Limitations of the prototypes here analyzed are often due to the choice of a proper textile material and to their industrial and repeatable assembly. Future improvements will focus on solving these problems and increasing muscles’ maximum supply pressure. In this way, authors would obtain the movement of the forearm with a load on the hand, as now these pneumatic muscles often work properly only discharged.
Acknowledgments
The work presented in this paper was financed with funding from the Piedmont regional administration project, D.G.R. No. 227-4715 of 27 November 2006, entitled “HI-TEX: subtheme 4b—Active clothing and fabrics for rehabilitation”, and with funding from the Department of Politecnico di Torino Department of Mechanical and Aerospace Engineering.
Author Contributions
Guido Belforte was responsible for founds and supervising. Gabriella Eula contributed to researches on all kind of actuators presented in this parper. Alexandre Ivanov contributed to researches on textile muscles, large deformation actuators (Bellows and Worm Muscles) and pneumatic massage sleeve. Silvia Sirolli contributed to researches on textile muscles, braided fluid muscles and pneumatic massage sleeve. The work performed by Silvia Sirolli was part of her activity in pursuit of a doctorate degree.
Conflicts of Interest
The authors declare no conflict of interest.
References
- United Nations; Department of Economic and Social Affairs; Population Division. World Population Prospects: The 2012 Revision, Key Findings and Advance Tables; Working Paper No. ESA/P/WP.227; United Nations: New York, NY, USA, 2013. [Google Scholar]
- Belforte, G.; Quaglia, G.; Testore, F.; Eula, G.; Appendino, S. Wearable Textiles for Rehabilitation of Disabled Patients using Pneumatic Systems. In Smart Textile for Medicine and Healthcare, Materials Systems and Applications; Van Langenhove, L., Ed.; CRC Press: New York, NY, USA, 2007; Chapter 12; pp. 221–252. [Google Scholar]
- Morin, A.H. Elastic Diaphragm. U.S. Patent No. 2642091, 1953. [Google Scholar]
- Baldwin, H.A. Realizable Models of Muscle Function. In Proceedings of the First Rock Biomechanics Symposium, New York, NY, USA, 5–6 April 1969; pp. 139–148.
- Schulte, R.A. The Characteristics of the McKibben Artificial Muscle. In the Application of External Power in Prosthetics and Orthetics; Publication 874; National Academy of Sciences – National Research Council: Washington, DC, USA, 1961; Appendix H; pp. 94–115. [Google Scholar]
- Takagi, T.; Sakaguchi, Y. Pneumatic Actuator for Manipulator. U.S. Patent No. 4615260, 1986. [Google Scholar]
- Kukolj, M. Axially Contractible Actuator. U.S. Patent No. 4733603, 1988. [Google Scholar]
- Morecki, A.; Nazarczuk, K. Some Problems of Bioelectric Control of Natural and Artificial Limbs. In The Active Mechanical Engineering Quarterly; Warsaw, Poland, 1969. [Google Scholar]
- Raparelli, T.; Beomente Zobel, P.; Durante, F. On the Design of Pneumatic Muscle Actuators. In Proceedings of the 2nd Internationales Fluidtechnisches Kolloquium, Dresden, Germany, 16–17 March 2000.
- Yarlott, J.M.; Mass, H. Fluid Actuator. U.S. Patent No. 3645173, 1972. [Google Scholar]
- Paynter, H.M. Hyperboloid of Revolution Fluid-Driven Tension Actuators and Method of Making. U.S. Patent No. 4721030, 1988. [Google Scholar]
- Immega, G.; Kukoly, M. Axially Contractible Actuator. U.S. Patent No. 4939982, 1990. [Google Scholar]
- Daerden, F. Conception and Realization of Pleated Pneumatic Artificial Muscles and Their Use as Compliant Actuation Elements. Ph.D. Thesis, Vrije Universiteit Brussels, Brussels, Belgium, 1999. [Google Scholar]
- Daerden, F.; Lefeber, D. The concept and design of pleated pneumatic artificial muscles. Int. J. Fluid Power 2001, 2, 41–50. [Google Scholar] [CrossRef]
- Verrelst, B.; van Ham, R.; Vanderborght, B.; Lefeber, D.; Daerden, F.; van Damme, M. Second generation pleated pneumatic artificial muscle and its robotic applications. Adv. Robot. 2006, 20, 783–805. [Google Scholar] [CrossRef]
- Villegas, D.; van Damme, M.; Vanderborght, B.; Beyl, P.; Lefeber, D. Third-Generation Pleated Pneumatic Artificial Muscles for Robotic Applications: Development and Comparison with McKibben Muscle. Adv. Robot. 2012, 26, 1205–1227. [Google Scholar] [CrossRef]
- Davis, D.L.; Carlson, J.A. Fluidic Actuator. US Patent No. 6868773B2, 2005. [Google Scholar]
- Nakamura, T.; Shinohara, H. Position and Force Control Based on Mathematical Models of Pneumatic Artificial Muscles Reinforced by Straight Glass Fibers. In Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4361–4366.
- Tomori, H.; Nakamura, T. Theoretical Comparison of McKibben-Type Artificial Muscle and Novel Straight-Fiber-Type Artificial Muscle. Int. J. Autom. Technol. 2011, 5, 544–549. [Google Scholar]
- Tondu, B.; Ippolito, S.; Guiochet, J.; Daidie, A. A seven-degrees-of-freedom Robot-arm Driven by Pneumatic Artificial Muscles for Humanoid Robots. Int. J. Robot. Res. 2005, 24, 257–274. [Google Scholar] [CrossRef]
- Verrelst, B.; van Ham, R.; Vanderborght, B.; Daerden, F.; Lefeber, D.; Vermeulen, J. The Pneumatic Biped “Lucy” Actuated with Pleated Pneumatic Artificial Muscles. Auton. Robots 2005, 18, 201–213. [Google Scholar] [CrossRef]
- Airic’s arm. Available online: http://www.festo.com/net/SupportPortal/Files/42058/Airics_arm_en.pdf (accessed on 21 March 2014).
- Ferris, D.P.; Czerniecki, J.M.; Hannaford, B. An Ankle-Foot Orthosis Powered by Artificial Pneumatic Muscles. J. Appl. Biomech. 2005, 21, 189–197. [Google Scholar]
- Kobayashi, H.; Nozaki, H.; Tsuji, T. Development of Power Assist System for Caregiver by Muscle Suit. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 180–185.
- Kousidou, S.; Tsagarakis, N.; Caldwell, D.G. Assistive exoskeleton for task based physiotherapy in 3-dimensional space. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 Feburary 2006; pp. 266–271.
- Costa, N.; Bezdicek, M.; Brown, M.; Gray, J.O.; Caldwell, D.G.; Hutchins, S. Joint motion control of a powered lower limb orthosis for rehabilitation. Int. J. Automat. Comput. 2006, 3, 271–281. [Google Scholar] [CrossRef]
- Raparelli, T.; Beomonte Zobel, P.; Durante, F. The upper and lower assist systems developed at the University of L’Aquila. In Proceedings of the 1st International Conference on Complex Medical Engineering, Takamatsu, Japan, 15–18 May 2005; pp. 488–493.
- Realive™ Power Assist Device. Available online: http://panasonic.co.jp/corp/news/official.data/data.dir/en060925-6/en060925-6.html (accessed on 21 March 2014).
- Sasaki, D.; Noritsugu, T.; Takaiwa, M.; Yamamoto, H. Wearable Power Assist Device for Hand Grasping Using Pneumatic Artificial Rubber Muscle. In Proceedings of the SICE-ANNUAL CONFERENCE, Sapporo, Japan, 4–6 August 2004.
- The air pressure in the treatment of lymphoedema. Available online: http://www.fisiopress.com/index.php?option=com_content&view=article&id=120&Itemid=206&lang=en (accessed on 30 April 2014).
- Belforte, G.; Eula, G.; Ivanov, A.; Grassi, R.; Askri, H.; Appendino, S. Comparison of Assembly Techniques for Textiles used in Pneumatic Devices. J. Text. Inst. 2013, 105, 717–728. [Google Scholar]
- Visan, A.L. Research and Development of the Pneumatic Muscles Meant to Drive Prosthetic Equipments. Ph.D. Thesis, Politehnica University of Bucharest, Bucharest, Romania, 2012. [Google Scholar]
- Visan, A.L.; Alexandrescu, N.; Belforte, G.; Eula, G.; Ivanov, A. Experimental Researches on Textile Laminate Materials. Ind. Text. 2012, 6, 315–321. [Google Scholar]
- Belforte, G.; Eula, G.; Ivanov, A.; Visan, A.L. Bellows Textile Muscle. J. Text. Inst. 2013, 105, 356–364. [Google Scholar] [CrossRef]
- Davis, S.; Tsagarakis, N.; Canderle, J.; Caldwell, D.G. Enhanced Modelling and Performance in Braided Pneumatic Muscle Actuators. Int. J. Robot. Res. 2003, 22, 213–227. [Google Scholar] [CrossRef]
- Davis, S.; Caldwell, D.G. Braid Effects on Contractile Range and Friction Modeling in Pneumatic Muscle Actuators. Int. J. Robot. Res. 2006, 25, 359–369. [Google Scholar] [CrossRef]
- Fluidic Muscle DMSP/MAS. Available online: https://www.festo.com/cat/it_it/data/doc_engb/PDF/EN/DMSP-MAS_EN.PDF (accessed on 27 March 2014).
- Shadow 30 mm Air Muscle. Available online: http://www.shadowrobot.com/wp-content/uploads/2012/11/datasheet_30mm_sam.pdf (accessed on 27 March 2014).
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
MDPI and ACS Style
Belforte, G.; Eula, G.; Ivanov, A.; Sirolli, S. Soft Pneumatic Actuators for Rehabilitation. Actuators 2014, 3, 84-106. https://doi.org/10.3390/act3020084
AMA Style
Belforte G, Eula G, Ivanov A, Sirolli S. Soft Pneumatic Actuators for Rehabilitation. Actuators. 2014; 3(2):84-106. https://doi.org/10.3390/act3020084
Chicago/Turabian StyleBelforte, Guido, Gabriella Eula, Alexandre Ivanov, and Silvia Sirolli. 2014. "Soft Pneumatic Actuators for Rehabilitation" Actuators 3, no. 2: 84-106. https://doi.org/10.3390/act3020084