
Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems
1
School of Mathematics and Statistics, Anhui Normal University, Wuhu 241005, China
2
College of Mathematics and Computer Science, Tongling University, Tongling 244000, China
*
Author to whom correspondence should be addressed.
Actuators 2024, 13(1), 3; https://doi.org/10.3390/act13010003
Submission received: 13 November 2023
/
Revised: 15 December 2023
/
Accepted: 15 December 2023
/
Published: 22 December 2023
(This article belongs to the Special Issue Applications of Finite-Time Disturbance Rejection Control Method)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper investigates an improved fixed-time stability theory together with a state feedback controller for a class of nonlinear stochastic systems. First, a delicate transformation is performed, and next, a Gamma function is utilized to directly derive the value of the integral function, which ultimately yields a fixed-time stabilization theorem with a higher precision upper bound for the settling time. Unlike the existing estimation process of amplifying twice, we only performed one amplification, which weakens the effect of amplification. Then, a state feedback controller is constructed for stochastic systems by the method of adding a power integrator. Utilizing the proposed stochastic fixed-time stability theory, simulations show that the intended controller ensures that the trivial solution of the suggested system is fixed-time stable in probability. The results of the simulation demonstrate that the suggested control scheme is meaningful.
1. Introduction
The stabilization of stochastic nonlinear systems has always been a concern of control theorists. For example, in one study, the asymptotic stability of stochastic nonlinear systems was studied via the application of the backstepping technique [1]; in another study [2], the output feedback stability matter of stochastic nonlinear systems was examined, and so on. However, using this approach, in asymptotic stability, the equilibrium point converges to zero as time approaches infinity. An infinite convergence time may not be conducive to practical applications. To tackle this issue, the stochastic finite-time stability theorem was proposed [3,4]. Subsequently, many finite-time stability control schemes have been devised for a variety of stochastic systems [5,6,7,8,9,10,11]. For instance, two studies [7,10] discussed finite-time stabilization for strict-feedback nonlinear stochastic systems, while a third [11] considered switching stochastic nonlinear systems. Following this, one group of researchers [12] addressed the finite-time stability matter of p-norm stochastic constrained systems. While another [13] investigated finite-time stabilization for nonlinear stochastic systems with asymmetric output constraints.
It needs to be emphasized that the upper bound estimation of settling time functions attained in the aforementioned studies are sensitive to the initial states of the system. In other words, the convergence time is also uncertain if the initial value is not available, and it may increase unboundedly with an increasing initial value. Additionally, significant improvement in the convergence time requires placing the initial state at a suitable location within the state space in advance, which is not viable. To alleviate this problem, a theorem of fixed-time stability was proposed [14,15]. Furthermore, a finite settling time estimation was gained from the obtained theorem, guaranteeing that the estimation is independent of the initial conditions. Currently, the research on fixed-time control has made many achievements. For instance, a fixed-time HOSM (high-order sliding mode) controller under asymmetric output constraints was proposed in one study [16]; in a second study [17], through sliding mode theory and adaptive control technology, two controllers were designed to improve system performance; while a third study [18] examined the adaptive fixed-time tracking control of stochastic pure-feedback nonlinear systems.
Nevertheless, estimating the upper bound of the settling time is not a simple task. To date, some interesting conclusions have been obtained on settling time estimation for deterministic fixed-time stability systems. For example, a non-conservative upper bound for special circumstance was provided in one [19]. While, in a second, by using integral transformation technology, a smaller estimation of settling time was achieved [20]. However, for fixed-time stability of stochastic nonlinear systems, there have been only a few studies on how to enhance the estimation accuracy of settling time. In one [21], a relatively accurate estimation was obtained compared to that in one of the studies in which the theorem was proposed [14], but the achieved upper bound for settling time remained conservative. Hence, the primary goal of this paper is to investigate this issue and yield a higher-precision estimation of the settling time for nonlinear stochastic systems. As a secondary goal, we will also consider the design of the state feedback controller.
The major contributions of this essay can be summed up in two parts:
- (1)
- A new estimation of the settling time is obtained through an ingenious variable transformation and the application of the Gamma function that is more accurate than existing settling time estimations;
- (2)
- Applying adding a power integration approach, a continuous state feedback controller is created for a stochastic system. Utilizing the theory of fixed-time stability, it is shown that the suggested controller ensures that the investigated system is fixed-time stable in probability.
The rest of the paper is structured as follows. The relevant theories are given in Section 2, the main theorem of the paper and the design of a state feedback controller are given in Section 3, and a numerical simulation is given in Section 4 to illustrate the effectiveness of the proposed methodology. Section 5 concludes the paper.
2. Problem and Preliminaries
Consider the following stochastic system:
where is the state vector, is an r dimensional standard Wiener process defined on probability space ( ) with being a simple space, is the domain of the -field, and P is measurable in probability, , and are Borel measurable continuous functions, and .
Definition 1
Definition 2
([7,11]). The origin of system (1) is framed as finite-time stable in probability, if the solution exists for an arbitrary initial vector, labeled as , and the subsequent definitions establish
- (1)
- Finite-time attractiveness in probability: for each initial data , the stochastic settling time is finite almost everywhere, i.e., ;
- (2)
- Stability in probability: for each pair of and , there exists a makes ,.
Definition 3
- (1)
- The equilibrium solution is finite-time stable in probability;
- (2)
- , where and independent of the initial data.
Definition 4
Definition 5
Lemma 1
Lemma 2
Lemma 3
Lemma 4
Lemma 5
3. Main Results
In this section, we will use the above ingenious variable transformation and Gamma function to acquire a more precise upper-bound estimation of the settling time function, and design a fixed-time stabilizing controller for a stochastic strict-feedback system.
3.1. A Fixed-Time Stability Theorem
Theorem 1.
Proof.
Let . Then, from the definition of , we can attain . Next, let , thereby one is able to attain that . Furthermore, for any , one can infer that
By the definitions of the function and function, one has
Clearly, is a positive constant. Then, in accordance with Lemma 2, it can be inferred that system (1) has a fixed-time stable equilibrium point with a holding inequality (9). □
Remark 1.
Although other authors [14,21] have also studied fixed-time stability, the fixed-time stability theorems in these two studies provided conservative upper bounds, something that requires improvement. Specifically, the settling time satisfies in the first study [14], while in the second [21], it satisfies . Comparing the above proof with these two studies, we can see that the upper bound estimations of the settling time functions in the previous studies were obtained by amplifying the integral function and the integration region, while we only amplify the integration region to gain the upper bound. Hence, it is easily known that is less than . Thus, this paper proposes a improved method to obtain a more accurate settling time estimation.
3.2. State-Feedback Controller Design
Consider a class of nonlinear stochastic systems as follows:
where is denoted as the input state and is denoted as the state variable; ; the definition of is consistent with system (1); in addition, and are known smooth functions, and satisfy , and referred to as system drift and the diffusion term, respectively.
Assumption 1.
For , there exist known non-negative smooth functions such that
where , .
Remark 2.
Assumption 1 is borrowed from references [26,27], which considered the finite-time stability of deterministic nonlinear systems. In this paper, we take stochastic factors into account and the growth condition is similarly given for the diffusion term. For convenience, we can choose with of even and odd numbers, respectively, which implies that is always odd.
Firstly, the following coordinate transformation are given
where are virtual controllers and will be constructed subsequently.
Step 1. Select the Lyapunov function .
By Definition 1, Lemma 4, and Assumption 1, we can gain the following inequality:
where , and are smooth functions.
So, we construct the first virtual controller as
where , and are design parameters.
Step . Assuming that at step there is a Lyapunov function , with , and a string of virtual controllers , such that
where are non-negative continuous functions.
Then, we can construct the ith Lyapunov function
According to the definition of , we can obtain
To facilitate the subsequent calculations, we render the following propositions and will provide specific proofs in Appendix A.
Proposition 1.
A positive constant called exists that makes
Proposition 2.
A positive smooth function called exists, which thereby makes
Proposition 3.
There exists a positive smooth function that makes
Proposition 4.
There exists a positive smooth function that makes
Substituting Propositions 1–4 into (26) results in
Therefore, a virtual controller can be designed
where . Then, substituting (32) into (31), we will acquire
Step n. Based on the previous induction step, a series of virtual controllers can be obtained, so the Lyapunov function can be selected as
and the actual controller can be constructed as
where is non-negative. Then, when , substituting (35) into Equation (33) will gives the following
Remark 3.
It should be noted that both this paper and previous authors [7] have considered stochastic strict feedback nonlinear systems, but that earlier study mainly considered the finite-time stability issue, while the fixed-time stability is investigated in this paper. As we know, finite-time settling time estimation depends on the initial conditions, while fixed-time settling time estimation is independent of the initial states. The method of adding a power integrator was applied to design the actual controller in this paper as well as in the earlier paper, but the gain functions of the controllers designed in the two papers are very different. Compared to finite-time controllers, the gain function of the controller designed in this paper has one additional term , which renders a quicker convergence rate.
3.3. Stability Analysis
The next criterion will indicate the stability perorations for system (12).
Theorem 2.
Proof.
By Lemma 4, we can prove that
Furthermore, combining Equation (38), it can be verified that
In light of the definition of , it holds that
From (36), (40), and Lemma 3, we can gain
where are positive parameters. Because , we can obtain . Thus, using Theorem 1, one is able to conclude that the origin of the stochastic nonlinear system is fixed-time stable in probability. Meanwhile, inequality (37) holds. □
4. Simulation Example
This section provides the outcomes of simulations of the following systems to further verify the conclusion of Theorem 1
We choose ; then, Obviously, Assumption 1 holds with
Hence, . The controller can be created as follows
where .
We can choose According to Theorem 1, it can be calculated that = 172.8405, which is less than the of a previous paper [21].
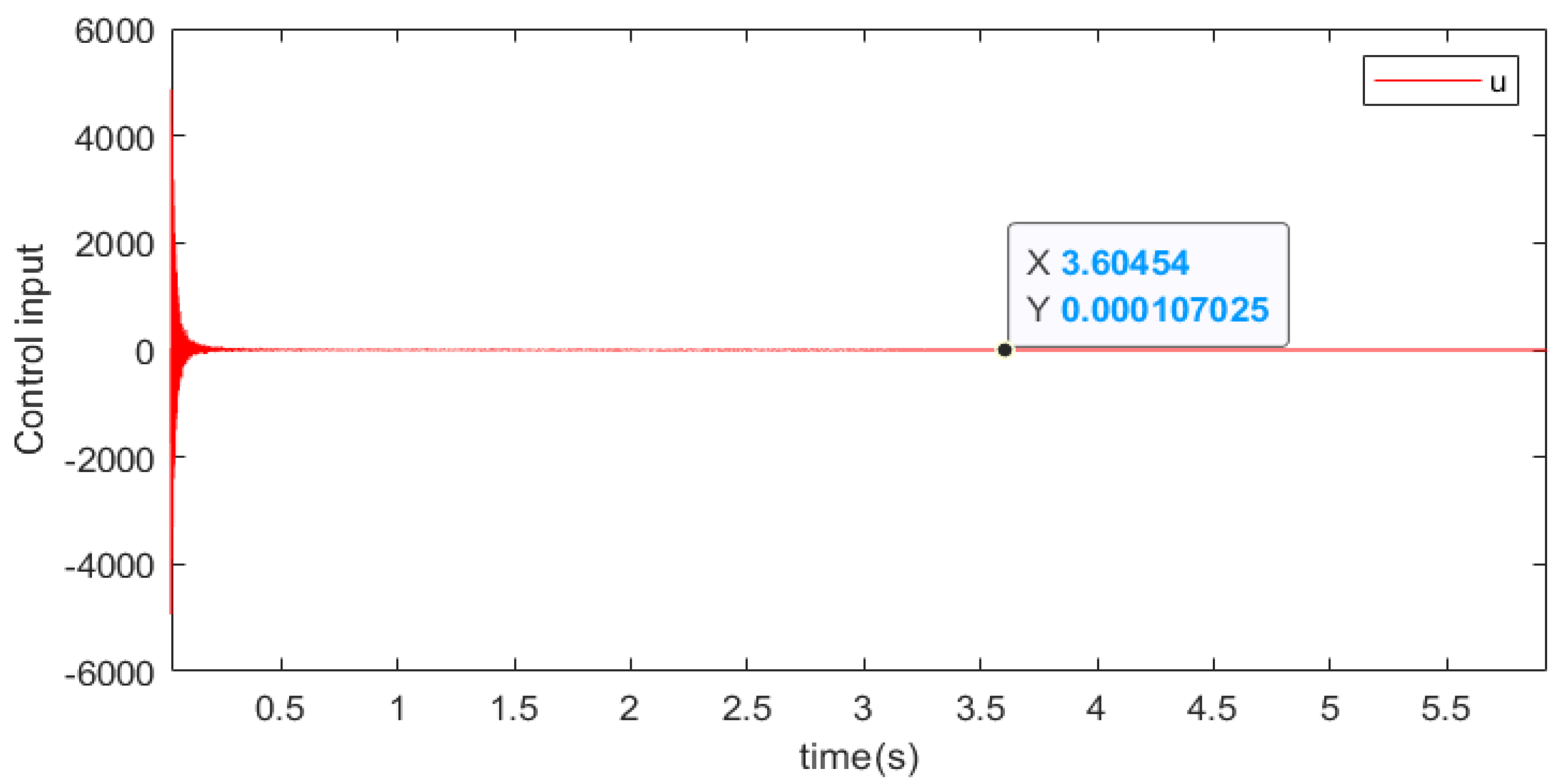
Next, we select various initial data and . Figure 1, Figure 2, Figure 3 and Figure 4 show the numerical results of two different initial vectors. Figure 1 and Figure 3 show the trajectories of and under different initial conditions and which reach a stable state within the same time. In addition, the trajectory of controller u is shown in Figure 2 and Figure 4 and which reaches a stable state within the same time. When , it can be seen from Figure 1 and Figure 2 that the convergence time of the system states and controller is almost 3.5 s, satisfying . When , from Figure 3 and Figure 4, we can see that the convergence time of the system states and controller is almost 3.5 s. These results indicate that the origin of system (42) with different initial values is always fixed-time stable in probability and different the initial states do not affect the convergence time of the system.
5. Conclusions
In this paper, a fixed-time theorem with a more accurate estimate of the settling time has been proposed and demonstrated to work. By the proposed ingenious transformation and using a Gamma function to directly calculate the value of the integral function, a more accurate settling time estimation of stochastic nonlinear systems has been obtained than in existing approaches. In addition, a fixed-time stabilizing controller for the investigated system was designed via the method of adding a power integrator, which allowed us to demonstrate that the investigated system is fixed-time stable. In future work, we will consider the fixed-time stabilization of stochastic nonlinear systems with unmeasurable states.
Author Contributions
Conceptualization, Z.L. and L.F.; methodology, Z.L.; validation, Z.L. and L.F.; writing—original draft, Z.L.; writing—review and editing, W.Z., L.F. and D.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (62103306), Scientific Research Project of Anhui Higher Education Institutions (2022AH020094 and 2023AH051661).
Data Availability Statement
Data will be made available on request.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Proof of Proposition 1.
Through Lemma 4, it follows that
According to the definition of , it holds that
where is a constant.□
Proof of Proposition 2.
Proof of Proposition 3.
In accordance with the construction of and let ; for the convenience of writing, we record as , and, thereby, one obtains
where is a non-negative smooth function.
Proof of Proposition 4.
Through the definition of , Lemma 5 and let , for the convenience of writing, we record as , one can thereby surmise that
where is a non-negative smooth function.
Similarly, one can obtain
where is a smooth function. Additionally, from Assumption 1 and Equation (A3), one obtains
Thus, combining Equations (25), (A9) and (A10) can be proved that
where and are non-negative smooth functions. Thus, by utilizing Equations (22)–(24) and Equations (A8)–(A10), one can further obtain in a similar way that
where are non-negative smooth functions. Let , then, combining Equations (A11)–(A14) ultimately yields
□
References
- Deng, H.; Krstić, M. Stochastic nonlinear stabilization-I: A backstepping design. Syst. Control Lett. 1997, 32, 143–150. [Google Scholar] [CrossRef]
- Liu, J.S.; Jiang, P.Z.; Zhang, F.J. Global output feedback stabilization for a class of stochastic non-minimum phase nonlinear systems. Automatics 2008, 44, 1944–1957. [Google Scholar] [CrossRef]
- Chen, W.S.; Jiao, L.C. Finite-time stability theorem of stochastic nonlinear systems. Automatics 2010, 46, 2105–2108. [Google Scholar] [CrossRef]
- Yin, J.; Khoo, S.; Man, Z.; Yu, X. Finite-time stability and instability of stochastic nonlinear systems. Automatics 2011, 47, 2671–2677. [Google Scholar] [CrossRef]
- Fang, L.D.; Ma, L.; Park, J.H.; Ding, S. Finite-time stabilization for a class of stochastic output-constrained systems by output feedback. Int. J. Robust Nonlinear Control 2022, 32, 1256–1271. [Google Scholar] [CrossRef]
- Yu, X.J.; Yin, J.L.; Khoo, S.Y. Generalized Lyapunov criteria on finite-time stability of stochastic nonlinear systems. Automatics 2019, 107, 183–189. [Google Scholar] [CrossRef]
- Khoo, S.; Yin, J.; Man, Z.; Yu, X. Finite-time stabilization of stochastic nonlinear systems in strict-feedback form. Automatics 2013, 49, 1403–1410. [Google Scholar] [CrossRef]
- Yin, J.L.; Khoo, S.Y. Continuous finite-time state feedback stabilizers for some nonlinear stochastic systems. Int. J. Robust Nonlinear Control 2015, 25, 1581–1600. [Google Scholar] [CrossRef]
- Zha, W.T.; Zhai, J.Y.; Fei, S.M.; Wang, Y.J. Finite-time stabilization for a class of stochastic nonlinear systems via output feedback. ISA Trans. 2014, 53, 709–716. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, Q. Finite-time stabilization of high-oredr stochastic nonlinear systems in strict-feedback form. Automatics 2015, 54, 735–745. [Google Scholar] [CrossRef]
- Huang, S.; Xiang, Z. Finite-time stabilization of switched stochastic nonlinear systems with mixed odd and even powers. Automatics 2016, 73, 130–137. [Google Scholar] [CrossRef]
- Fang, L.D.; Ding, S.; Ma, L.; Zhu, D. Finite-time state-feedback control for a class of stochastic constrained nonlinear systems. J. Franklin Inst. 2022, 359, 7415–7437. [Google Scholar] [CrossRef]
- Fang, L.D.; Ma, L.; Ding, S.; Park, J.H. Finite-time stabilization of high-order stochastic nonlinear systems with asymmetric output constraints. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7201–7213. [Google Scholar] [CrossRef]
- Yu, J.; Yu, S.; Li, J.; Yan, Y. Fixed-time stability theorem of stochastic nonlinear systems. Int. J. Control 2019, 92, 2194–2220. [Google Scholar] [CrossRef]
- Yu, J.; Yu, S.; Li, J.; Yan, Y. Fixed-time stability of stochastic nonlinear systems and its application into stochastic multi-agent systems. IET Control Theory Appl. 2021, 15, 126–135. [Google Scholar] [CrossRef]
- Ma, L.; Mei, K.; Ding, S.; Pan, T. Design of adaptive fuzzy fixed-time HOSM controller subject to asymmetric output constraints. IEEE. Trans. Fuzzy Syst. 2023, 31, 2989–2999. [Google Scholar] [CrossRef]
- Ma, L.; Cheng, C.; Guo, J.; Shi, B.; Ding, S.; Mei, K. Direct yaw-moment control of electric vehicles based on adaptive sliding mode. Math Biosci. 2023, 20, 13334–13355. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.X.; Hou, Z. Adaptive fixed-time tracking control for stochastic pure-feedback nonlinear systems. Int. J. Adapt. Control Signal Process. 2021, 35, 1712–1731. [Google Scholar] [CrossRef]
- Parsegov, S.; Polyakov, A.; Shcherbarkov, P. Nonlinear fixed-time control protocol for uniform allocation of agents on a segment. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 642–657. [Google Scholar]
- Aldana-Lopez, R.; Gómez-Gutiérrez, D.; Jiménez-Rodríguez, E.; Sánchez-Torres, J.D.; Defoort, M. Enhancing the settling time estimation of a class of fix-time stable systems. Int. J. Robust Nonlinear Control 2019, 29, 4135–4148. [Google Scholar] [CrossRef]
- Min, H.F.; Xu, S.Y.; Zhang, B.Y.; Ma, Q.; Yuan, D.M. Fixed-time Lyapunov criteria and state-feedback controller design for stochastic nonlinear systems. IEEE/CAA J. Autom. 2022, 9, 1005–1014. [Google Scholar] [CrossRef]
- Bateman, H. Higher Transcendental Functions; McGraw-Hill: New York, NY, USA, 1955. [Google Scholar]
- Erdélyi, A.; Magnus, M.; Oberhettinger, F.; Tricomi, F.G.; Bateman, H. Higher Transcendental Functions; McGraw-Hill: New York, NY, USA, 1953; p. 1. [Google Scholar]
- Liu, W.; Qian, C.J. Adaptive control of nonlinearly paremeterized systems: The smooth feedback case. IEEE. Trans. Autom. Control 2002, 47, 1249–1266. [Google Scholar]
- Lin, W.; Qian, C.J. Adding one power integrator: A tool for global stabilization of high-order lower triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]
- Li, J.; Qian, C. Global finite-time stabilization of a class of uncertain nonlinear systems using output feedback. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 2652–2657. [Google Scholar]
- Zhai, J.; Qian, C. Global control of nonlinear systems with uncertain output function using homoge-neous domination approach. Int. J. Robust Nonlinear Control 2012, 22, 1543–1561. [Google Scholar] [CrossRef]
Figure 1.
System state response with .
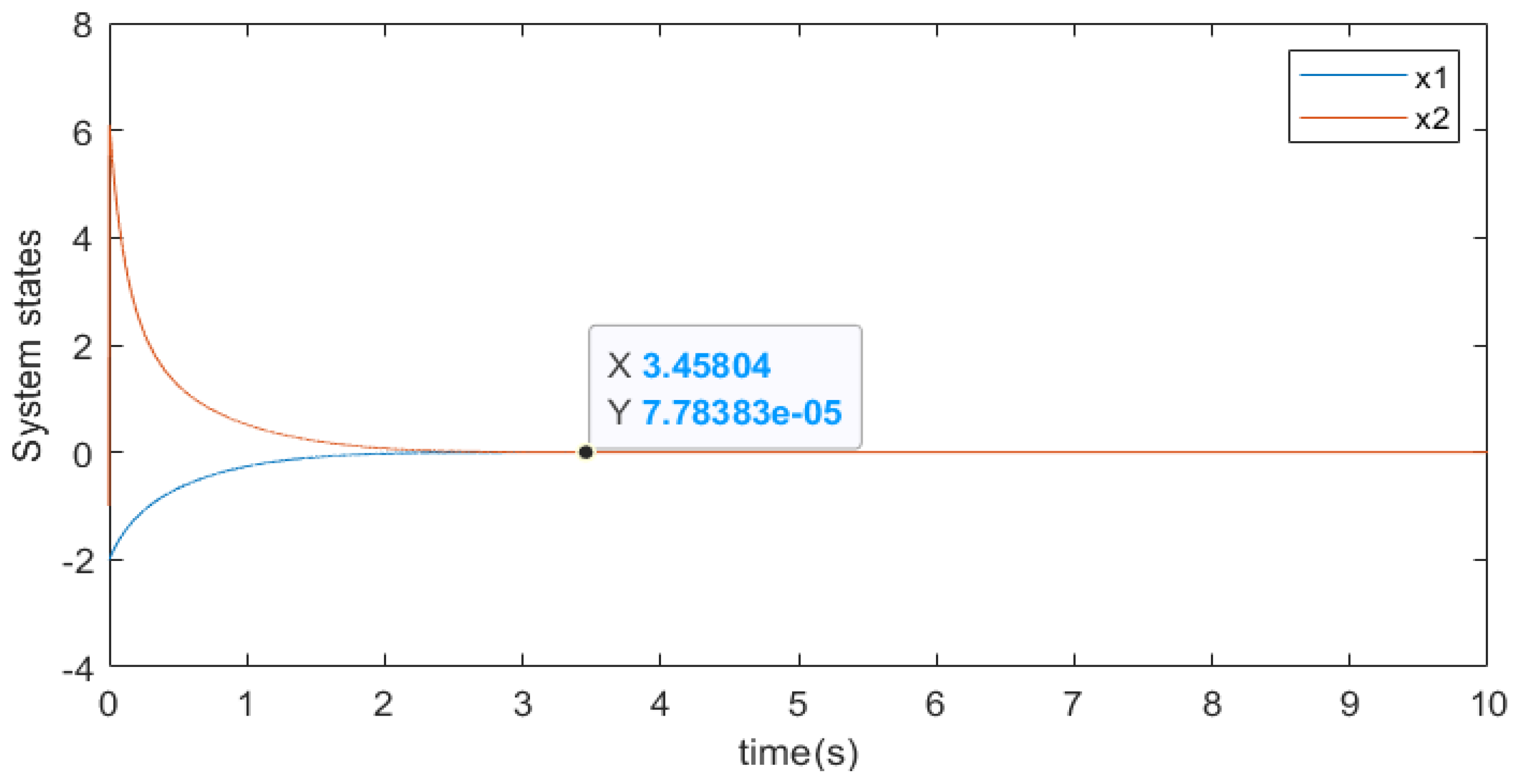
Figure 2.
Input control response with .

Figure 3.
System state response with .
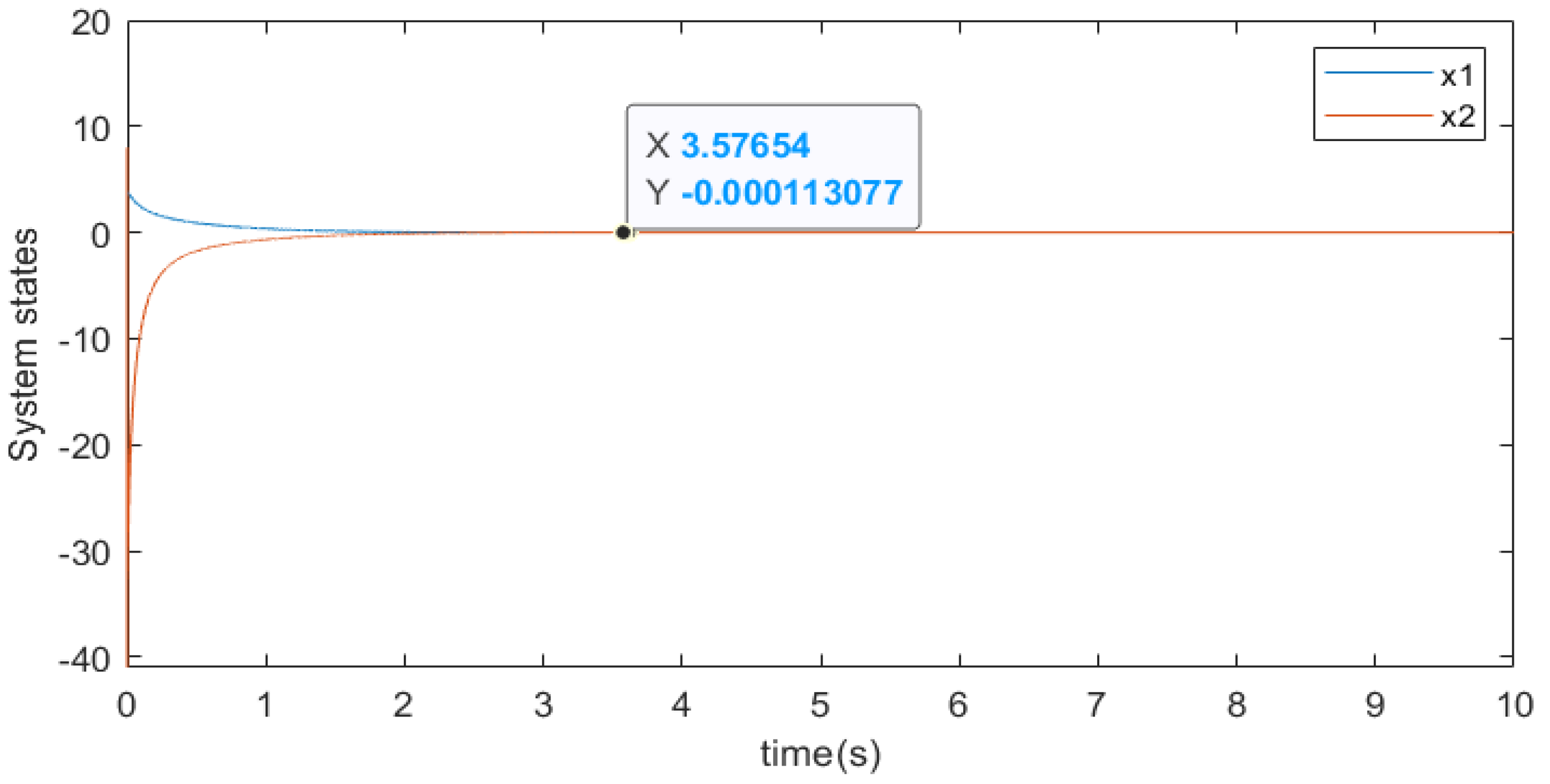
Figure 4.
Input control response with .
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Long, Z.; Zhou, W.; Fang, L.; Zhu, D. Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems. Actuators 2024, 13, 3. https://doi.org/10.3390/act13010003
AMA Style
Long Z, Zhou W, Fang L, Zhu D. Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems. Actuators. 2024; 13(1):3. https://doi.org/10.3390/act13010003
Chicago/Turabian StyleLong, Zhenzhen, Wen Zhou, Liandi Fang, and Daohong Zhu. 2024. "Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems" Actuators 13, no. 1: 3. https://doi.org/10.3390/act13010003
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.