1. Introduction
There are still certain challenges for adaptive stable grasping on targets such as vulnerable bodies and irregular parts. The key to solving this problem is to design the manipulator with certain adaptability and flexibility for multimode active switching. Therefore, this work focuses on researching a manipulator that can achieve active switching between two-point clamping and envelope grasping.
The advantages of cable-driven parallel mechanisms are high flexibility, low motion inertia, reconfigurability, and quick response times. A certain degree of adaptability and compliance for the grasped movement is provided by the driving cable’s flexible elasticity [
1], which can improve the anti-damage coupling ability between the grasped target and the mechanism and enable a better dynamic interaction between the target and the mechanism [
2]. This type of mechanism has been successfully applied in the fields of material handling, logistics and transportation, agricultural monitoring, disaster relief, limb rehabilitation, and high-speed cameras [
3,
4,
5,
6,
7,
8]. The cable-driven rigid–flexible combined manipulator is composed of a cable-driven system and a compliant mechanism, which has a certain flexibility and sufficient grasping force, overcoming the problems of insufficient flexibility in traditional rigid manipulators and insufficient grasping force in pure soft robots. It has broad application prospects in intelligent grasping tasks.
As one of the important end-effectors of robots, the manipulator is the key component in direct contact with the grasped target [
9] and determines the operating performance. Therefore, the design of manipulator is very important. Babin et al. [
10] conducted a detailed literature review on the design of robotic mechanical grippers. Babin indicated that no single gripper can perform every possible grasping or manipulation task. So, many specialized manipulators specifically designed for specific tasks are used in different fields. And for the rigid–flexible combined cable-driven parallel robot studied in this article, Zhang et al. [
11] provided a comprehensive summary of its theories and developments. His review showed that the performance and practicality of the rigid–flexible combined cable-driven parallel robot can be improved by the combination of rigid chains, parallel cables, and passive tensioning elements. This idea provides a new approach for the configuration design of high-performance cable-driven parallel robots.
So far, some researchers have conducted in-depth research on the structural design, mechanical analysis of cable-driven manipulators. Ma et al. [
12] proposed a multimode gripper with asymmetric hand design, which consists of a dexterous cable-driven index finger and a modular thumb with varying degrees of passive compliance. The thumb is not actuated, so the gripper is unable to complete symmetrical operation. Bircher et al. [
13] designed a grasp–reposition–reorient gripper to address the challenging problem of repositioning objects while maintaining stable grasp in robotic manipulation. This study provided a new approach for the design of multifunctional grippers without using sensors. Firouzeh et al. [
14] presented a design of tendon-driven robotic origami, which possessed the features self-adaptability and inherent softness due to its redundant and underactuated degrees of freedom. This research also verified the task versatility of the manipulator in soft and stiff modes by specifying model-based joint stiffnesses for performing different grasping modes. Based on this research, some grippers with soft and stiff modes can be designed. Dong et al. [
15] proposed a fingertip optimization design model to evaluate the best fingertip shape and determine the size range of objects that could be steadily grasped by fingertips. However, the relationship between the geometric parameters and grasping stability was not established. Leddy et al. [
16] proposed a constraint optimization framework, to evaluate the post contact stability of a single degree of actuation of an underactuated precision manipulator. Kim et al. [
17] proposed a three-finger adaptive manipulator with five degrees of freedom and the ability actively transition between precise parallel clamping and compliant clamping. Hussain [
18] presented the use of interpenetrating composite materials and a prism topology based on mathematical control with a minimum surface to create a soft gripper with the required stiffness. Min et al. [
19] presented a novel design of an anthropomorphic robotic hand driven by parallel cables with a single motor that mimicked the muscle antagonism of the human hand. Zhang et al. [
20] presented a new design scheme for an actuator with a zigzag cable routing mode, which was proposed to realize the transition from 2D bending to 3D motion. Xiong et al. [
21] presented an adaptive multikernel dictionary learning method to analyze the characteristics of grasping force and the force coupling between multiple fingers, which improved the performance of robotic grasping state recognition. This work effectively overcomes the force correlation between multiple fingers and the individual tactile sensors. Zhang et al. [
22] proposed a six-step approach to simulate the grasp for a versatile vacuum manipulator, which evaluated the grasp quality using a gripping attention convolutional neural network. This study effectively solved the problem of flexible grasping of unknown objects in unstructured environments.
Modeling and analysis on cable-driven manipulators were carried out in the above studies; however, the above research has not adequately achieved the function of multi grab mode switching, or the integrated design of adaptability and compliance. Although the relationship between the design parameters and the output force has not been established in some of the literature, there is a lack of sensitivity analysis of the design parameters, which is necessary for optimizing design. Therefore, in this paper, a mathematical model between the design parameters and the output force is established by modeling and sensitivity analysis of the design parameters of a cable-driven rigid–flexible combined manipulator.
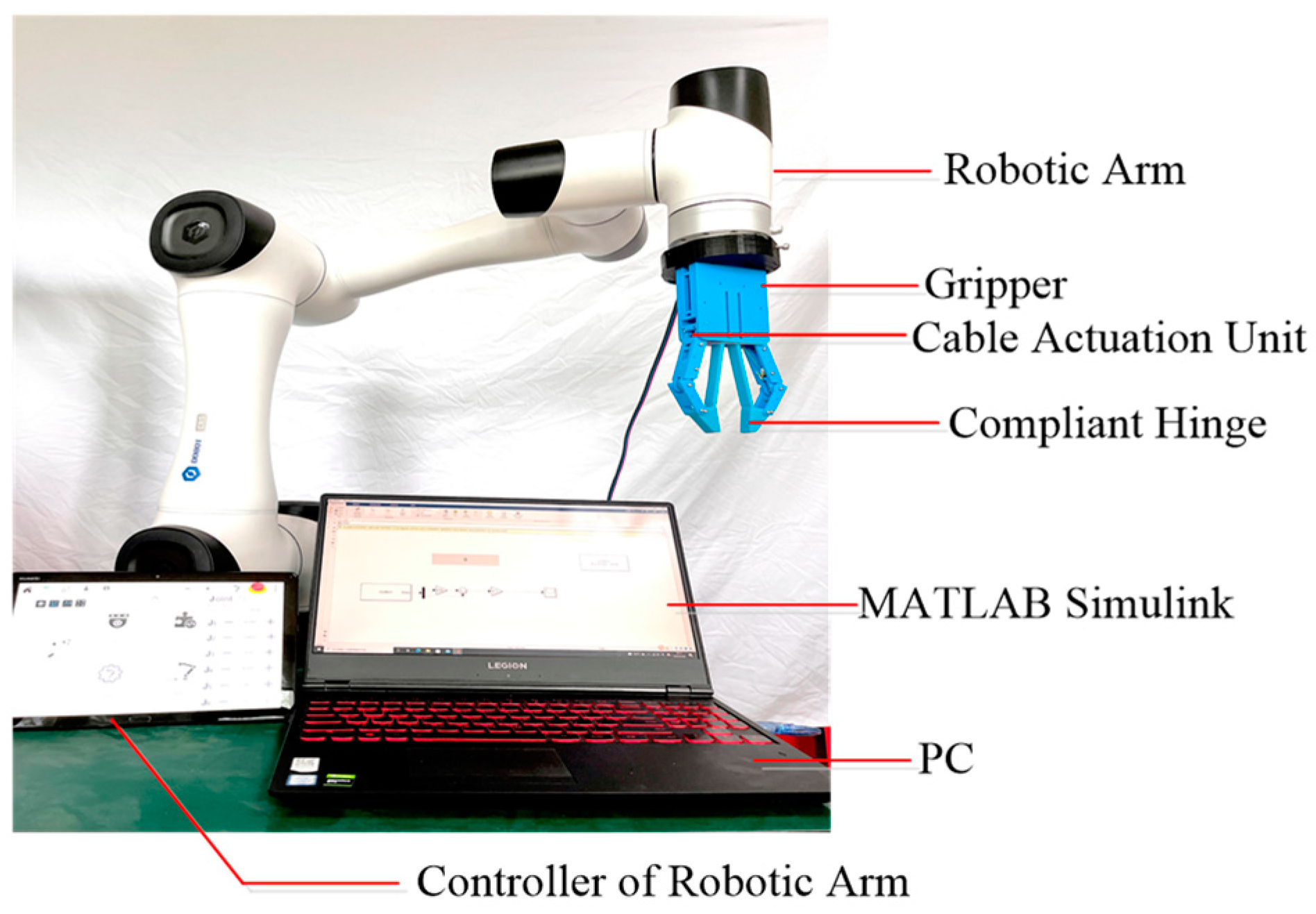
To realize the adaptability and compliance of the manipulator, the research object in this paper is the cable-driven rigid–flexible combined manipulator, as shown in
Figure 1. Its cable-driven unit and compliant unit are designed. The variance in parameters in sensitivity analysis is calculated using the Monte Carlo method. The force model of the cable-driven rigid–flexible combined manipulator in two-point clamping mode is established, and the input–output relationship model of the finger in envelope grasping mode is discussed in depth. Finally, to verify the grasp performance of the cable-driven rigid–flexible combined manipulator, grasp performance comparison tests are carried out in two-point clamping mode and envelope grasping mode.
2. Design of the Cable-Driven Manipulator
The characteristic of this study is to combine a compliant mechanism with a cable-driven system to solve the problem of automatic mode switching. A cable-driven system is adopted to achieve a certain adaptive grasping function, and a compliant mechanism is used to achieve a compliant fit between the fingers and the grasped target.
The cable-driven rigid–flexible combined manipulator is mainly composed of three parts: a cable-driven system, a compliant unit, and a rigid structure. The cable-driven system consists of cables, pulleys, motors, and hinge points. The flexibility of the cables can improve the adaptability of the manipulator. The compliant unit is mainly composed of compliant fingertips, compliant hinges, and compliant beams, which realizes the adaptive fit between the manipulator and the grasped target and enhances the compliance of the manipulator. The design of the cable-driven rigid–flexible combined manipulator is discussed in this section.
2.1. Design of the Cable Actuation Units
To endow the manipulator with certain adaptability and compliance features, the use of a cable-driven system to transmit power and motion is proposed. The design of the cable path for the cable-driven rigid–flexible combined manipulator in different clamping modes is shown in
Figure 2.
The design of the cable path for the manipulator in two-point clamping mode and envelope grasping mode is shown in
Figure 2a. As shown in
Figure 2a, the cable paths are symmetrically distributed, and cables 1 and 2 are driven by motor 1. Each cable is driven by three two-way pulley blocks. Each cable is connected to the rigid structure through hinges 1 and 2. Due to the unidirectional force of the cable, the mechanical fingers of the cable-driven rigid–flexible combined manipulator are only subjected to cable tension, so the manipulator passively returns to the initial position. To realize the automatic reset of the cable-driven rigid–flexible combined manipulator, the design includes the placement of torsion tension spring 1 at the joint to provide stretching force to ensure the automatic reset of the manipulator.
The cable path design of the manipulator in twisting mode is shown in
Figure 2b. As shown in
Figure 2b, the cable path is still a left–right symmetrical design, and the two cables are driven by different motors. Each cable is fastened to the flexible connection unit with hinges 3 and 4. In the process of grasping, the object is first grasped in two-point clamping mode as driven by motor 1. On this basis, motors 2 and 3 are controlled to twist the grasped object and the flexible mechanism, respectively, under the action of the surface friction force.
2.2. Design of the Compliant Units
To achieve the stable grasping of fragile and specially shaped parts, the manipulator is required to have a certain adaptive grasping ability. In this paper, a compliant unit is designed to realize the adaptive fit between the manipulator and the grasped target to achieve stable grasping, as shown in
Figure 3. It is a circular arc compliant hinge, which has a kind of kinematic pair structure that can generate relative motion between the flexible beam, the fingertip, and the base [
23]. Compared with rigid hinges, compliant hinges have the advantages of being simple to manufacture and assembly-free and are widely used in compliant mechanisms. To increase the friction force of the fingertip, a gear-shaped fingertip contact surface is designed on the flexible fingertip to improve the stable grasping ability of the manipulator.
4. Sensitivity Analysis
To determine the relationship between the manipulator grasping performance and the variation in the design parameters, a sensitivity analysis of the manipulator design parameters was carried out. The sensitivity analysis was divided into global sensitivity analysis and local sensitivity analysis. Due to the complex structure and many dimensional design variables of the cable-driven rigid–flexible combined manipulator designed in this paper, it is difficult to obtain the sensitivity of the design parameters by using the direct derivation method in the local sensitivity analysis. The global sensitivity analysis method can be used to test the total influence of the common changes of multiple design variables on the model output, which is suitable for systems with strong nonlinearity or nonmonotonicity [
26]. In this section, the global sensitivity analysis method based on variance is used to analyze the dimensional parameter sensitivity of the cable-driven rigid–flexible combined manipulator. In this method, the model is decomposed into independent single parameters, the functions of the parameters are combined with each other, and the sensitivity of the parameters is analyzed by calculating the influence of the variance of a single design variable or variable set on the total output variance [
27].
4.1. Sensitivity of the Design Parameters
The stable grasping performance of the cable-driven rigid–flexible combined manipulator was measured in terms of the output force. Parameters that affect grasping performance were determined through force analysis using grasping tests. Based on the performance test analysis results, sensitivity analysis modeling was conducted to determine the influence of each possible parameter on the grasping performance of the cable-driven rigid–flexible combined manipulator. Then, the Monte Carlo method was used to calculate the variance in a specific probability distribution, resulting in design variables with low parameter sensitivity, which were set as constant values to simplify complex multi-parameter optimization schemes. Parameters with high sensitivity were selected for multi-objective optimization analysis of the manipulator to obtain the maximum contact force of the multimode manipulator.
According to force analysis and modeling, the parameters affect the output force of the manipulator. Therefore, the above parameters were set as the design variables of sensitivity analysis and recorded as vectors .
The output force of manipulator is a function of the design variable
, i.e.,
. It is assumed that the elements in the vector are independent of each other. The vector
is normalized to
. Thus, the following expression can be obtained:
The purpose of normalization is so that each parameter index can be comprehensively compared in the same order of magnitude. Furthermore, the model
is divided as follows:
where
is independent of vector
, and the split function is only related to the corresponding independent variable.
The sensitivity of the variable relative to the output force of the manipulator can be expressed as:
where the total variance
represents the degree to which the output force function
is affected by the output force model when all parameters in the normalized sensitivity analysis vector
change, and the biased variance
represents the change in function
when only a single variable
is considered.
According to the relationship between the variance and mathematical expectation, the following expression can be obtained:
Therefore, the deviation in output force relative to the design parameters is expressed as:
Due to the complex structure of the output force model, the integral calculation of Equations (32) and (33) is difficult to solve analytically. Because the design variable
obeys the uniform distribution condition within its value range, we can obtain vector
through normalization, which meets the conditions of Monte Carlo statistical sampling to calculate the probability problem of complex objects. Therefore, the Monte Carlo method was proposed to calculate the total variance and deviation. The flowchart for calculating the total variance and deviation based on the Monte Carlo method is shown in
Figure 13.
The sensitivity of the design parameters was calculated using an example. The parameters are shown in
Table 1. The sampling base was set to N = 1000 for the calculation, and the total variance and the partial square difference of each single variable were calculated in two-point clamping and envelope grasping modes, respectively. By substituting these values into Equation (33), the sensitivities of different parameters relative to the output force function in different modes were obtained, as shown in
Figure 14.
Figure 14 shows that in two-point clamping and envelope grasping modes, the sensitivity of the length of the flexible beam is 0.7404 and 0.7265, respectively, which is much greater than that of the other design variables, so the function
is most affected by the length of the flexible beam.
4.2. Simulation Analysis of the Sensitivity
To verify the effectiveness of the sensitivity, seven groups of numerical examples were selected for simulation. The value of one design variable was changed in turn on the basis of the control variable method, and the values of the other design variables remained unchanged. For the simulation software, the same boundary conditions were set, and the effectiveness of the sensitivity was verified by calculating and comparing the change rate of the output force in each case.
Table 2 shows the specific size parameters of each calculation example.
It is assumed that the input cable tension is 20 N and the grasped target is a cylinder with a radius of 50 mm. The simulation results are shown in
Figure 15. From the relationship between the input force and the output force in the figure, it can be seen that in the two clamping modes, when the size of the flexible beam is increased, the output force changes the most, that is, the size sensitivity of the flexible beam is the strongest. The changes in other parameters have little effect on the output force of the manipulator, which can almost be ignored. Therefore, the sensitivity analysis of the design parameters was effective.
5. Grasping Performance Experimental Verification
To verify the grasping performance of the manipulator, a test prototype of the cable-driven rigid–flexible combined manipulator was designed and analyzed. The main components of the test platform include a cable-driven rigid–flexible manipulator, laser displacement sensor, pressure sensor (DYHW-108, DAYSEN-SOR, Guangzhou, China), dynamometer (DS2-500N, PUYAN, Guangzhou, China), and digital display, as shown in
Figure 16. An output force stability test was carried out on the manipulator prototype, and the theoretical and experimental results were compared to verify the validity of the static model for the two grasping modes.
The rigid grasping mechanism and the grasped targets were fabricated using 3D printing technology, and the flexible grasping mechanism was fabricated using lamination processing technology. The dynamometer was used to measure the cable force, and the pressure sensor was attached to the left and right sides of the grasped object to measure the output force. Two types of comparative tests were set up in the test. One involved changing the cable force and measuring the change in the output force while keeping the radius of the grasped targets unchanged. The other involved keeping the cable force unchanged and changing the radius of the grasped target to measure the change in the output force. Five groups were set up for each type of experiment, and six repeated measurements were performed in each group to obtain the average value.
5.1. Clamping Test in Two-Point Clamping Mode
In two-point clamping mode, when the grasped target radius was 55 mm, the change in the output force was calculated as shown in
Figure 17a. It can be seen from the figure that the change trends of the experimental, theoretical, and simulation values in two-point clamping mode are similar, and the output force increases linearly with increasing cable force. When the cable force was less than 30 N, the simulation value and experimental value increased more than the theoretical value. When the cable force was greater than 30 N, the increase in the experimental value was smaller than that in the theoretical value. This shows that as the cable force increases, the friction between the cable and the pulley also increases, resulting in loss. The maximum relative error between the experimental value and the theoretical value was 6.27%, which is within the allowable range for engineering applications.
When the cable force was 30 N, the change in output force was calculated as shown in
Figure 17b. In two-point clamping mode, the variation trends of the experimental, theoretical, and simulation values were similar, and the output force increased with increasing grasped target radius. When the grasped target radius was less than 55 mm, the error between the experimental value and the theoretical value gradually decreased. When the grasped target radius was greater than 55 mm, the error between the experimental value and the theoretical value gradually increased. Because the radius of the grasped target was too large, the contact point between the manipulator and the grasped target fluctuated and evolved from two-point clamping to envelope grasping, and the force of the grasped target was unstable, which led to an increase in error.
To verify the grasp stability of the manipulator in two-point clamping mode, a stability test of the output force was carried out. The results are shown in
Figure 18. It can be seen from the figure that the output force increases rapidly within 0–2.5 s and is in a stable output state after 2.5 s, indicating that the response time of the output force in the two-point clamping mode is 2.5 s. The maximum error between the experimental value and the simulation value was 5.84%, which is within the allowable range for engineering applications.
5.2. Grasping Test in Envelope Grasping Mode
In envelope grasping mode, when the grasped target radius was 55 mm, the change in output force was calculated as shown in
Figure 19a. It can be seen from the figure that the change trends of the experimental, theoretical, and simulation values in envelope grasping mode are similar, and the output force increases linearly with increasing cable force. The experimental value was always smaller than the theoretical value, which may have been due to friction during the test. The maximum relative error between the experimental value and the theoretical value was 5.37%, which is within the allowable range for engineering applications.
When the cable force was 30 N, the change in output force was calculated as shown in
Figure 19b. In envelope grasping mode, the experimental, theoretical, and simulation values had similar changing trends, and the output force increased with increasing grasped target radius. The error between the experimental value and the theoretical value decreased gradually when the grasped target radius was less than 50 mm. When the grasped target radius was greater than 50 mm, the error between the experimental value and the theoretical value gradually increased. It may be that as the radius of the grasped target increases, the contact surface between the flexible beam and the grasped target increases, and the cumulative error of the output force increases.
To verify the grasping stability of the manipulator in envelope grasping mode, a stability test of the output force was carried out. The results are shown in
Figure 20. It can be seen from the figure that the response time of the output force in envelope grasping mode is the same as that in two-point clamping mode, which is 2.5 s, and the output force is in a stable state after 2.5 s. The maximum error between the experimental value and the simulated value was 2.27%, which is within the allowable range for engineering applications.
5.3. Fruit Grasping Test
To verify the antibreakage grasping performance of the cable-driven rigid–flexible combined manipulator, grasping experiments were carried out on common fruits, as shown in
Figure 21. The grasped targets were a grape, banana, brin, plum, orange, pear, mango, and peach, which have different shapes and sizes. In the fruit grasp tests, the gripper was attached to a robot arm. This study controlled the cable’s retraction and release motion through the forward and reverse rotation of the motor, achieving the target’s grasping and releasing. Since the grasp tests’ purpose was to prove that the cable-driven rigid–flexible combined manipulator could achieve two-point clamping and enveloping grasping of fruits, this study artificially adjusted the positions of fruits during the test. There is a pre-contact process between the cable-driven rigid–flexible combined manipulator and the fruits, rather than automatically grasping through the visual system as a fruit picking robot.
The grasping test showed that the grasping mode gradually changed from two-point clamping to envelope grasping with increasing size. It can be concluded that there is a certain relationship between the grasped target size and the grasping mode. During enveloping clamping, the flexible beam plays a certain role in protecting the fruit. The approximate range of two-point clamping and envelope grasping was obtained through experiments, as shown in
Table 3. It is worth noting that when the two-point clamping and envelope grasping ranges overlap, envelope grasping is more stable. When the envelope grasping range is exceeded, the manipulator automatically changes back to two-point clamping mode, and the critical value is approximately 110 mm.
5.4. Comparative Experiments
In order to highlight the advantages of the cable-driven manipulator, a comparative test was conducted. The same grasping task was performed using a link-driven compliant manipulator independently developed at our laboratory [
28]. The weight of the cable-drive manipulator is 173 g, and the weight of the link-driven compliant manipulator is 1122 g. The cable-driven manipulator has absolute advantages in weight. The sizes of the grasped targets are shown in
Table 4. It can be seen from
Figure 22 that the cable-driven manipulator is smaller than the link-driven compliant manipulator in size. The maximum opening size of the cable-driven manipulator is 133 mm, while the maximum opening size of the link-driven compliant manipulator is 120 mm.
To compare the stable grasping performance between the cable-driven manipulator and link-driven compliant manipulator, the grasping tests were performed on grasping targets of different sizes, as shown in
Figure 23. The changes in input force and grasping force are shown in
Figure 24. The maximum output efficiency of the cable-driven manipulator was 64.29%, and the minimum output efficiency was 52.38%. The maximum output efficiency of the link-driven compliant manipulator was 50%, and the minimum output efficiency was 45.83%. To grasp the same targets, the cable-driven manipulator requires greater input force to achieve stable grasping, and its output efficiency is higher.
With reference to the above grasping test, compared to the link-driven compliant manipulator, the adaptive cable-driven manipulator has several remarkable advantages: (1) the size is more compact, and it is more conducive to the task of limited workspace, such as long-distance transmission in a small space; (2) the design is relatively simple, easy to manufacture, and reconfigurable; (3) it is more lightweight, has smaller motion inertia, and is more suitable for high-speed operating occasions; (4) it can be modularized with 3D printing, resulting in lower cost; (5) it can produce a large output force and is highly efficient. All of these advantages in the adaptive cable-driven manipulator have contributed to some practical applications, such as limb rehabilitation training, fruit and vegetable picking, surgical operation, high-speed grasping, and so on.
6. Discussion
A comparison between the results obtained using the analytical model and a numerical implementation is presented in
Section 3. There are some relative errors. The reasons for the errors may include neglecting the friction of the cable-driven systems and the elastic deformation of twisted springs and flexible materials. In future research work, it is necessary to consider establishing a more accurate static model.
This study analyzed the sensitivity of design parameters in
Section 4. By comparing the theoretical sensitivity calculation results in
Figure 14 with the simulation results in
Figure 15, it can be seen that the cable-driven rigid–flexible combined manipulator is most sensitive to changes in the size of the flexible beam.
This study conducted experiments under different grasping modes, fruit grasping experiments, and comparative comparison tests with a link-driven compliant manipulator, as shown in
Section 5. Although there are errors in the theoretical model and experimental results, they are within the acceptable range of engineering. According to the experimental results, the cable-driven rigid–flexible manipulator can smoothly achieve automatic switching between two grasping modes and has certain advantages in lightweight and output efficiency.
Through the above theoretical analysis and experimental verification, it can be concluded that the novelty of this article is the design of a cable-driven rigid–flexible manipulator with a cable drive system and compliant hinge structure that can automatically switch between two-point clamping and envelope clamping modes, solving the problem of the traditional manipulator’s difficulty to stably grip special-shaped objects with complex contours, and improving the self-adaptability and protective grasping ability of the manipulator.
7. Conclusions
The structures of the cable-driven unit and compliant unit of the cable-driven rigid–flexible combined manipulator were constructed in this research to examine the adaptability and compliance of the manipulator, and the Monte Carlo method was used to analyze the global sensitivity of the design parameters. The cable-driven rigid–flexible combined manipulator’s grasping model was developed by analyzing the finger force in two-point clamping mode and envelope grasping mode. Numerical simulations and prototype testing were carried out to confirm the cable-driven rigid–flexible combined manipulator’s grasping capabilities. The test results demonstrated that the cable-driven system’s flexibility enables the manipulator’s adaptability, the compliant unit’s compliance enables the manipulator’s compliance, and the cable-driven rigid–flexible combined manipulator’s good adaptability and compliance enable the adaptive and stable grasping of delicate and uniquely shaped parts.
Despite this research realizing automatic switching between two-point clamping and envelope grasping, the cable-driven manipulator does not have the ability to perceive and is unable to perform dexterous operations. The cable-driven manipulator’s grasping control will undoubtedly be major area of research in the future. A grasping control for a robotic hand–eye system was developed in [
29], which implemented the task of grasping an object. It is worthwhile to learn manipulation based on sensory–motor fusion. The cable-driven manipulator is a strong nonlinear coupling mechanism. A previous study [
30] showed an example of grasping planning in which an autonomous motion planning method considering multiple conflicting performance metrics for a class of robots was designed, and a method of improving robustness and adaptability can be seen in [
31].
The cable-driven rigid–flexible manipulator designed in this research, which is capable of actively transitioning between clamping and grasping, can be widely applied in fields such as agricultural picking, food sorting, fragile product grabbing, and underwater biological fishing. To achieve commercial applications in these fields, it is also necessary to improve the intelligent perception ability and high-precision robust control performance of the cable-driven rigid–flexible manipulator. In short, there are still many works worthy of in-depth research on the cable-driven manipulator.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}