1. Introduction
Humanoid robots are expecting to play a major role in the future for performing tasks such as medical care, housework, entertainment, search and rescue, and many other tasks. The robot locomotion is an important point in developing a highly effective robot system. Recently, there have been some robots developed to perform indoor tasks such as cleaning and monitoring. Those robots use wheeled locomotion to move inside the human working environment. However, wheeled locomotion has some limitations, such as climbing the stairs and overcoming obstacles. The use of legged locomotion can overcome the limitations of wheeled locomotion. Moreover, legs are important to make the robot look more human, which would make the robot more adaptable within a human environment [
1,
2].
Many research achievements have been made to develop humanoid robots capable of coexisting with humans and performing a variety of tasks. For example, a research group in HONDA has developed the humanoid robots—P2, P3, and ASIMO [
3]. The Japanese National Institute of Advanced Industrial Science and Technology (AIST) and Kawada Industries, Inc. have developed HRP-2P, HRP-3, and HRP-4 [
2]. The Korea Advanced Institute of Science and Technology (KAIST) also developed a 40-DOF humanoid robot HUBO-2 that is capable of walking and running [
4]. Waseda University has a long history of developing humanoid robots, from the WABOT-1 in 1973, which was the first humanoid robot in history, to the WABIAN-2R, which is capable of various walking motions similar to human walking [
5,
6].
The vast majority of bipedal robots use precise joint position control for locomotion performance. This is called active walking, for which all robot’s actuators are fully powered. Those fully powered robots can do various tasks with reasonable speed and position accuracy at the cost of high control efforts, low energy efficiencies, and, most of the time, unnatural gaits. On the other hand, there are other types of robots that can perform passive walking. They are mainly referred to as passive-dynamic walking robots. These robots have been developed by researchers to mimic human walking. The main goal of building passive-dynamic walking robots is to study the role of natural dynamics in bipedal walking. Passive-dynamic walkers use gravitational energy to walk down a ramp without any actuators [
7,
8,
9,
10,
11]. They are highly energy efficient but have weak stability in terms of controlling the walking motion.
Recently, to overcome the limitations and disadvantages of both active and passive walking robots, researchers have proposed a hybrid type of walking technique that could include the advantages of both walking types. Researchers are trying to reach a hybrid walking type using two approaches. The first approach is from the active side, which is done by adapting passive dynamic behavior to reduce the amount of torque driven by the actuator. The natural dynamic behavior could be achieved by controlling the joints’ torque and angle trajectory, as in the case of CB and eMOSAIC developed by ATR [
12,
13]. Another method for adapting natural dynamic behavior is by using actuators with compliant behavior, as in the case of Lucy [
14,
15]. The second approach is from the passive walking side. In this approach, direct drive or elastic actuators are installed in some of the joints of the passive-dynamic walker. Examples for successful dynamic walking robots with this approach are the Cornell Robot, Denise and Toddler [
5,
16]. The development of an optimal design of a bipedal robot system that has high stability locomotion with high-energy efficiency has not been achieved.
Inspired by human and animal locomotion, researchers are trying to develop a highly efficient legged locomotion system. Studies conducted on animal locomotion have discovered the effect of the muscle system as the source of driving motion. In addition to the ability of the muscle to provide motion, it has the ability to produce elastic motion [
17]. The muscle’s activity could be modeled as a combination of two mechanisms connected in parallel; one mechanism is active, and the other is passive. The active mechanism is acting as an actuator, and the passive mechanism is acting similar to a nonlinear spring [
18,
19]. The human’s muscle plays a major role in controlling the locomotion with high-energy efficiency [
20,
21].
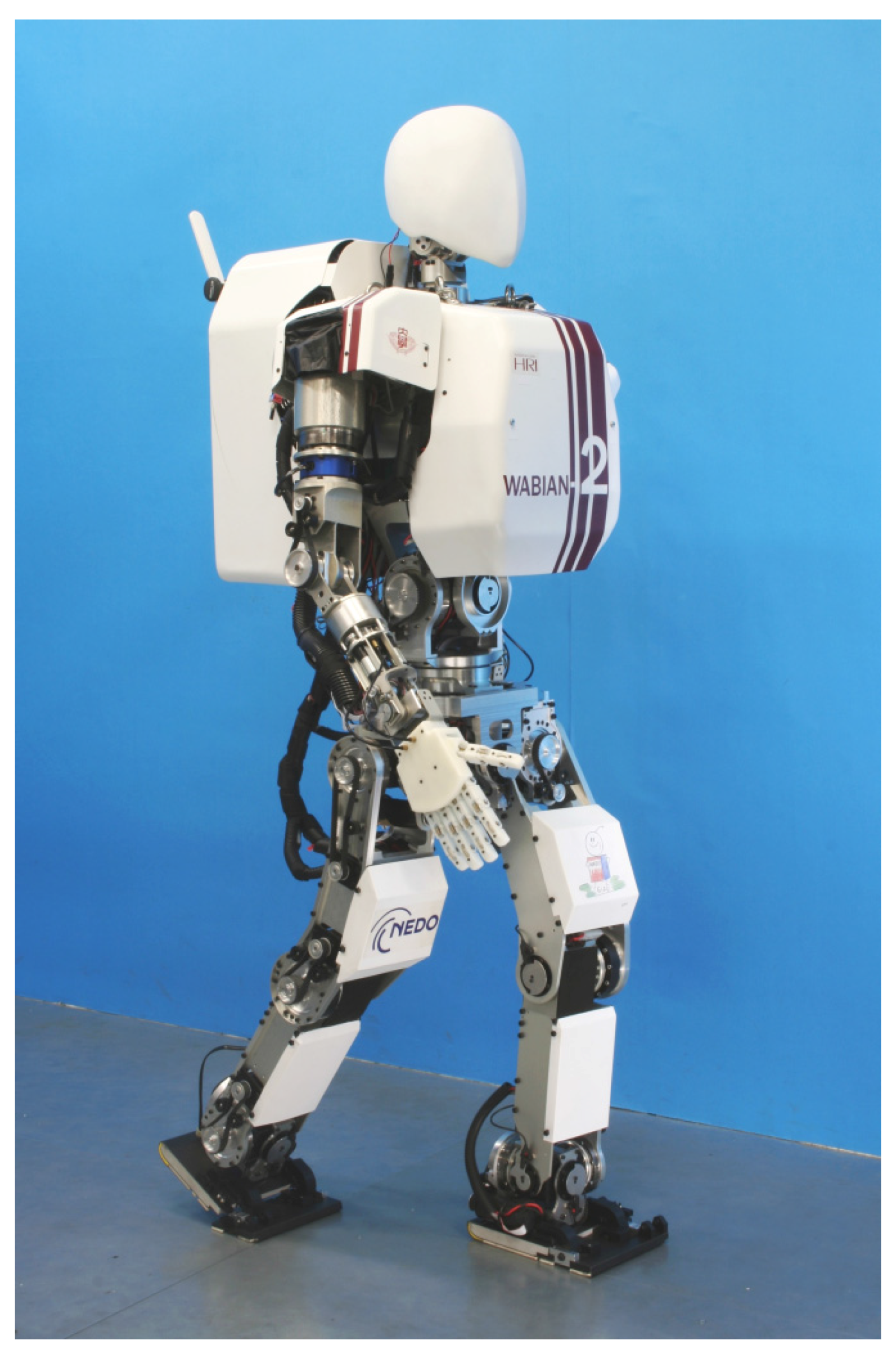
The bipedal humanoid robot WABIAN-2R (
Figure 1) was developed in the Takanishi laboratory to be used as a human motion simulator [
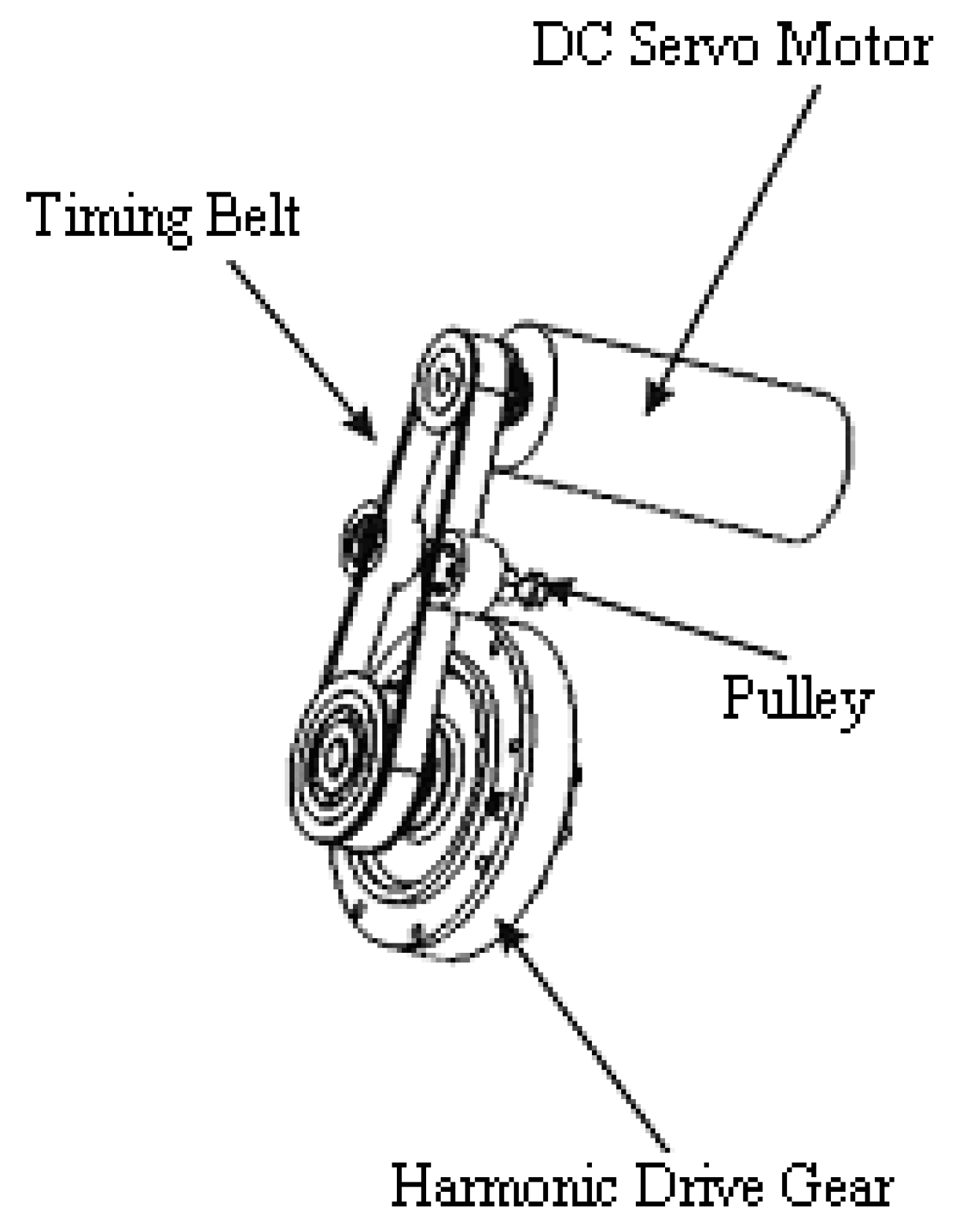
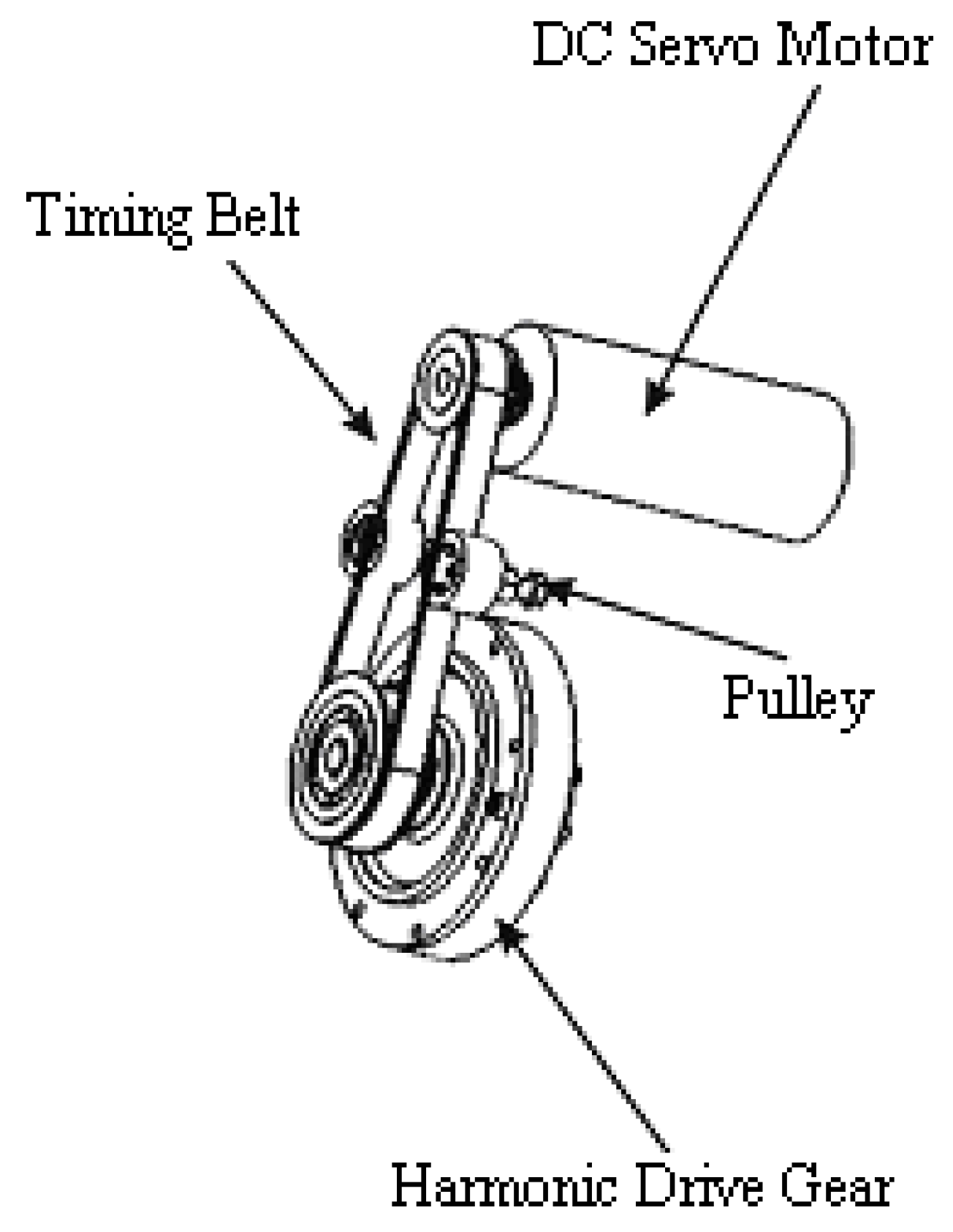
6]. The WABIAN-2R uses a harmonic drive gear (
Figure 2) with a high ratio in order to provide high torque to the leg’s joints for stable walking motion. Such a harmonic drive gear requires high-energy consumption from the motor due to the mechanism's large size, which would probably have high energy loss during motion. We proposed the idea of implementing the passive dynamic walking technique into the WABIAN-2R’s walking motion [
22]. Using computer simulations, we were able to simulate semi-passive dynamic walking by adding a controllable stiffness mechanism to the ankle pitch joint of the right leg [
23] and by switching between active and passive rotational motion in the ankle pitch joint in both legs [
24]. We tried to develop an adjustable stiffness mechanism to be added to the robot’s ankle joint in order to realize the semi-passive dynamic walking technique [
25].
Figure 2.
Joint gear system.
Figure 2.
Joint gear system.
In order to implement the semi-passive dynamic walking technique into the WABIAN-2R, we need to have a mechanism that is capable of switching between active and passive motion. There were some attempts to develop such a mechanism for a bipedal walking robot in [
26], which was a lightweight bipedal robot. However, the development of a mechanism that can provide hybrid motion for a full size humanoid robot has not been done. In this paper, we propose a design for a bi-directional adjustable stiffness mechanism that can be attached to the ankle joint of the WABIAN-2R. The proposed design can provide the capability of switching between active and passive rotational motion. Moreover, the mechanism could provide controllability of the stiffness of the ankle joint. Using computer simulations, we tested the performance of the mechanism and checked its ability to provide passive and active rotational motion. The simulation data tells us the effectiveness of such a mechanism design and the challenges of developing a real hardware prototype.
2. Analysis of the Ankle Joint’s Motion Performance
The ankle joint in the WABIAN-2R is made up of a DC Servomotor, a Harmonic Gear, and a Timing Belt that connect them (
Figure 2). In order to reduce the energy used during walking motion, we have proposed replacing the Harmonic drive gear system with a rotational spring mechanism. Using computer simulations, we tested the performance of the ankle joint (this technique was implemented using the right leg only) [
22,
23,
24].
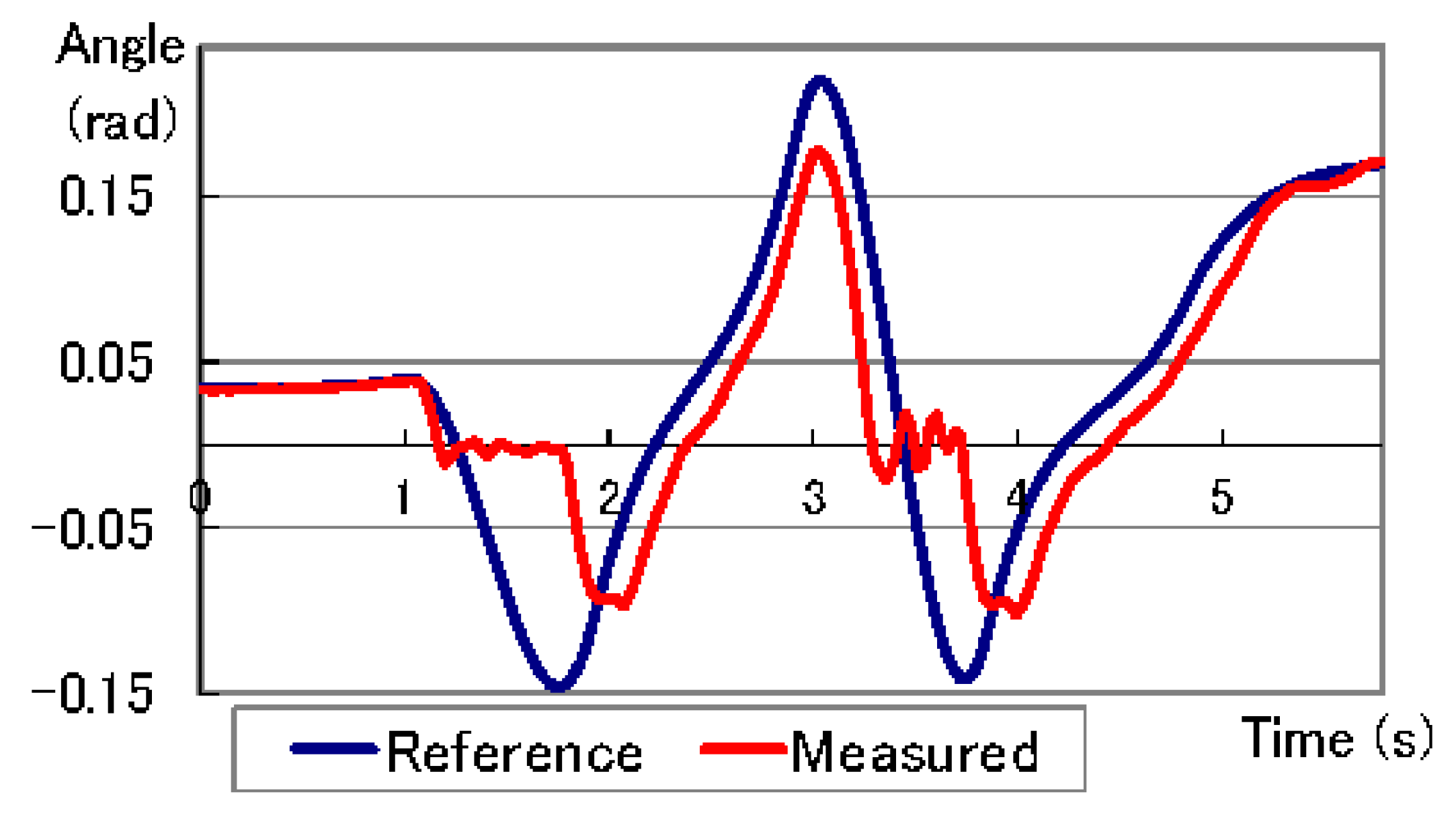
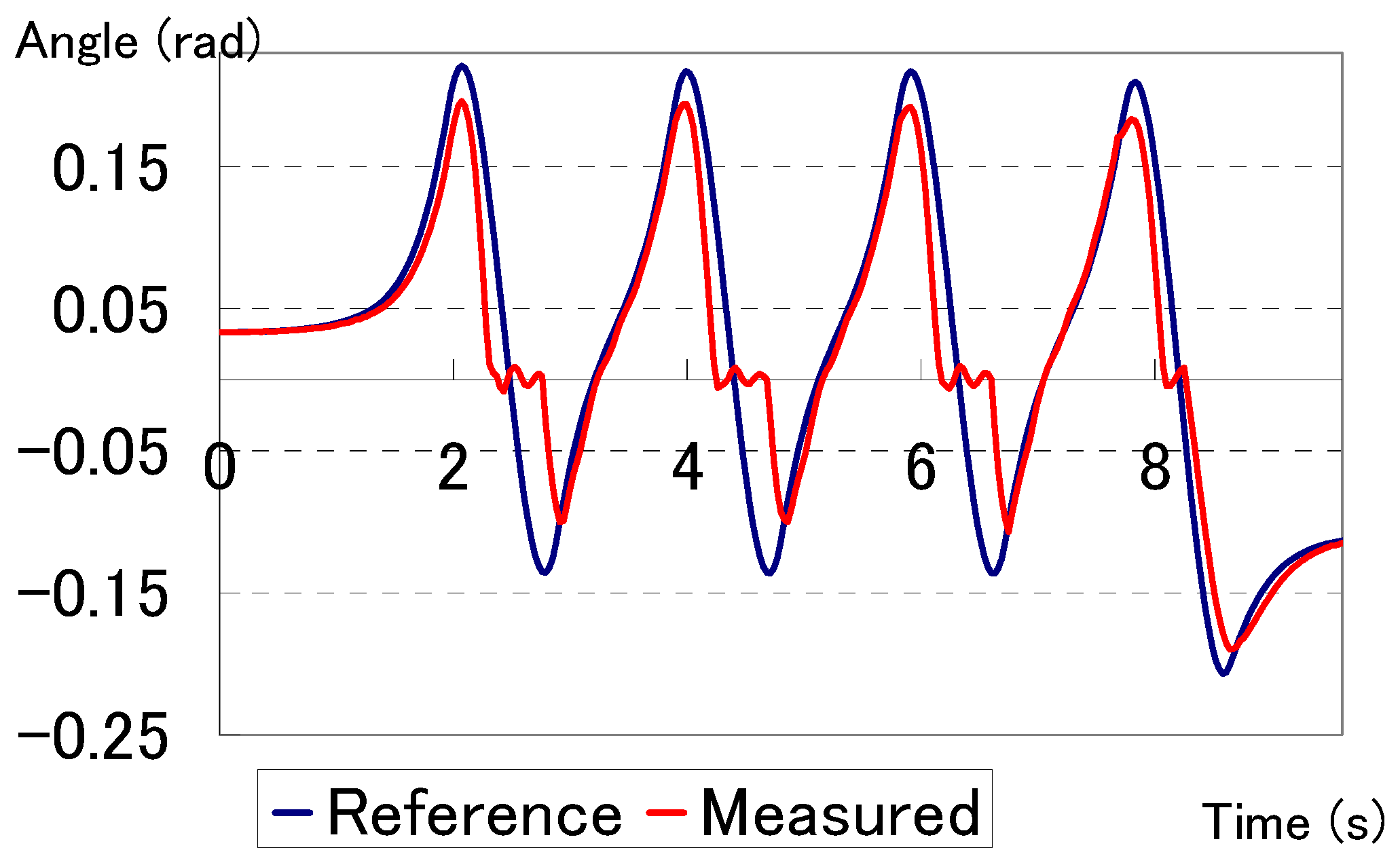
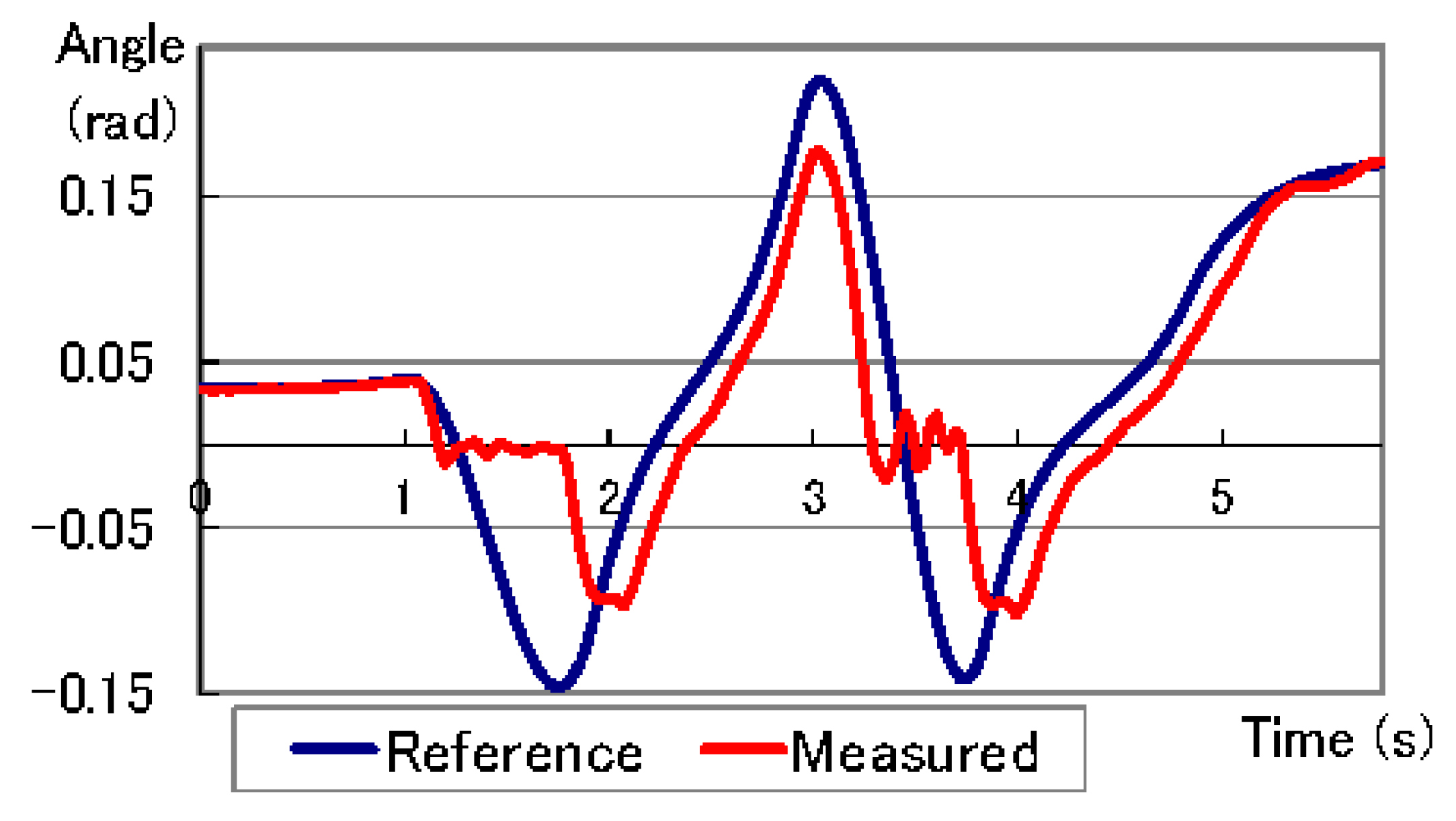
Figure 3 shows both the passive motion of the ankle joint position (red line) and the reference position for the walking trajectory in active motion (blue line).
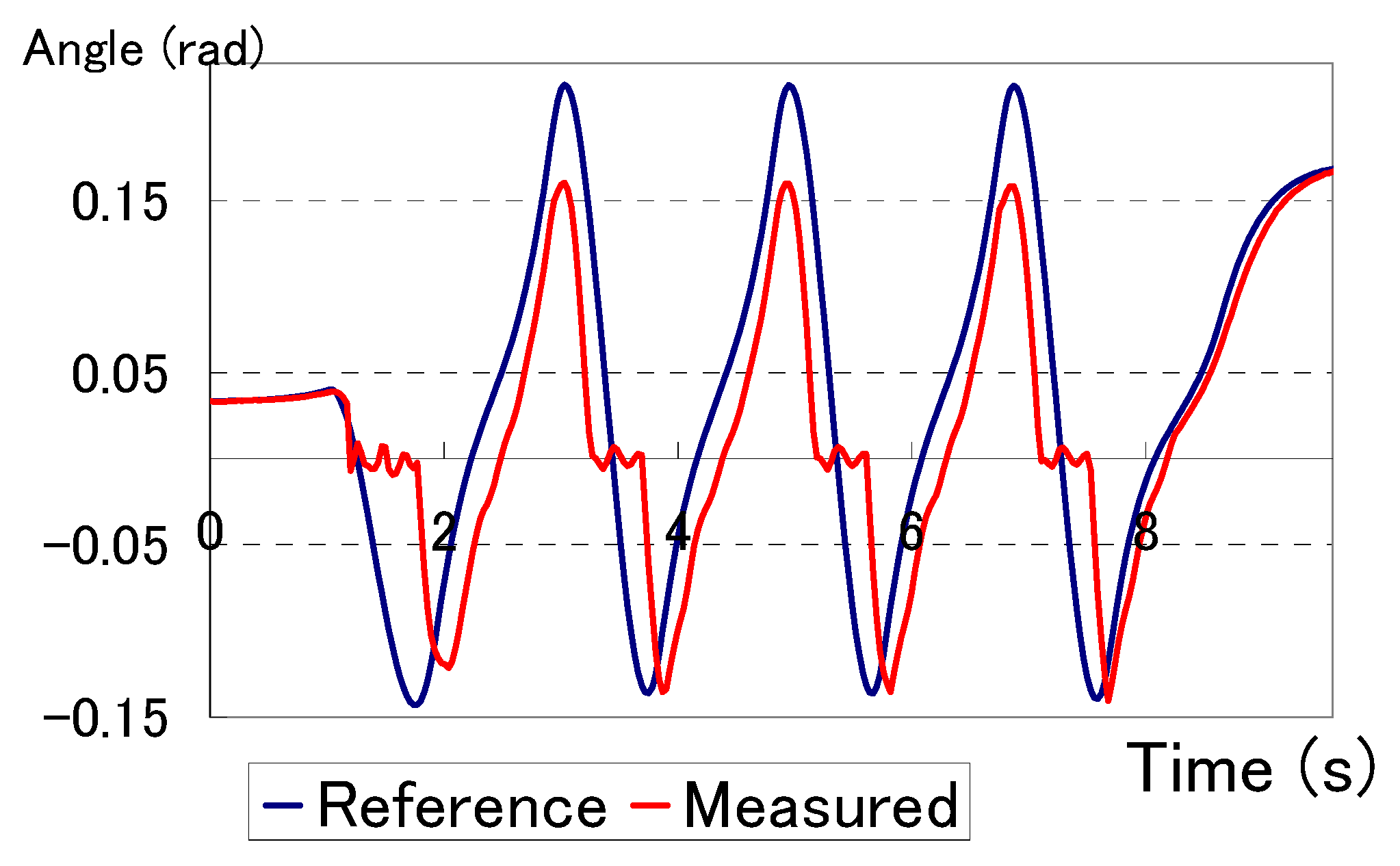
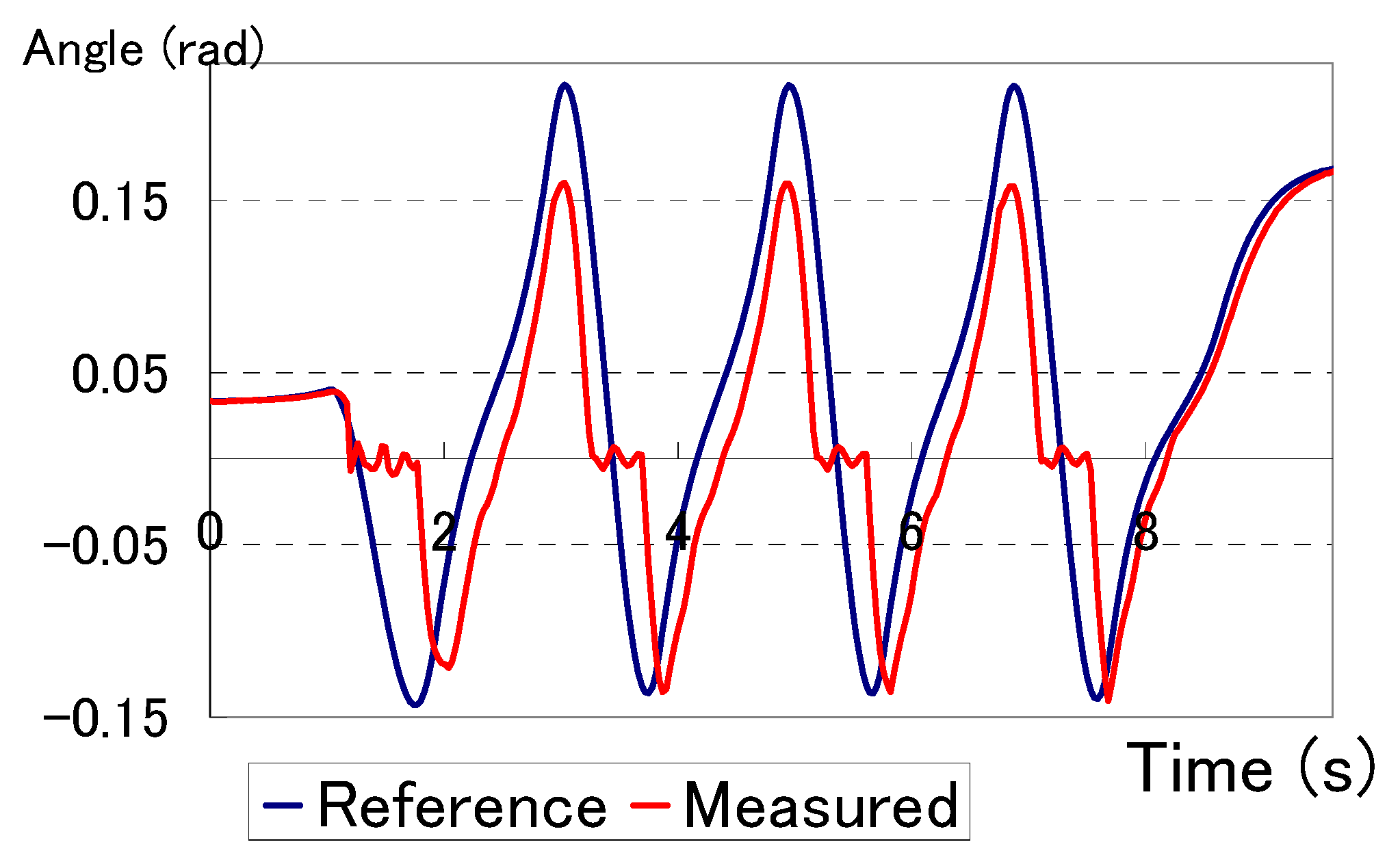
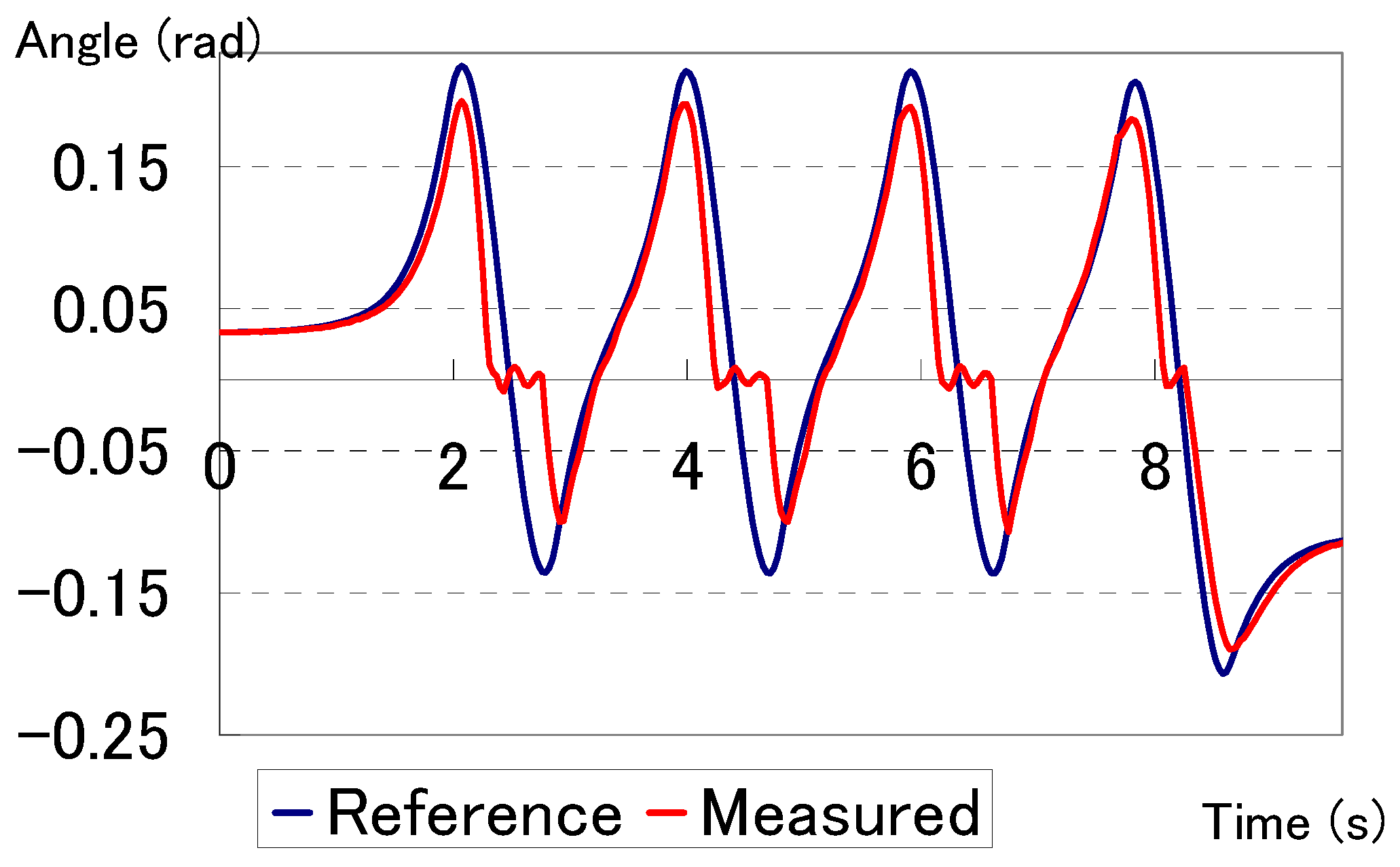
Figure 4 and
Figure 5 show the ankle joint position in both legs [
25], which has a hybrid control that switches between passive and active mode. Using the data we got from the simulation, we were able to determine the parameter values for the developed mechanism. The data show a range of motion within ±0.23 rad; we will use this motion range as our reference when evaluating the ankle joint with the new design.
Figure 3.
Position of the right ankle pitch joint for one leg passive walking.
Figure 3.
Position of the right ankle pitch joint for one leg passive walking.
Figure 4.
Position of the right ankle pitch joint for hybrid walking control.
Figure 4.
Position of the right ankle pitch joint for hybrid walking control.
Figure 5.
Position of the left ankle pitch joint for hybrid walking control.
Figure 5.
Position of the left ankle pitch joint for hybrid walking control.
3. Design of the Bi-Directional Adjustable Stiffness Artificial Tendon
The main characteristic of a leg’s joint is that it should provide enough torque to support the locomotion. Designing an actuated joint that can provide high torque while keeping low energy consumption is a great challenge. One of the most successful research achievements in designing such a joint is the design made in [
27]. The actuator design of [
27] can provide high torque and low energy consumption for the knee joint of a prosthetic leg. Inspired by the design presented in [
27], we proposed a novel design for providing rotational motion for the ankle pitch joint of the WABIAN-2R.
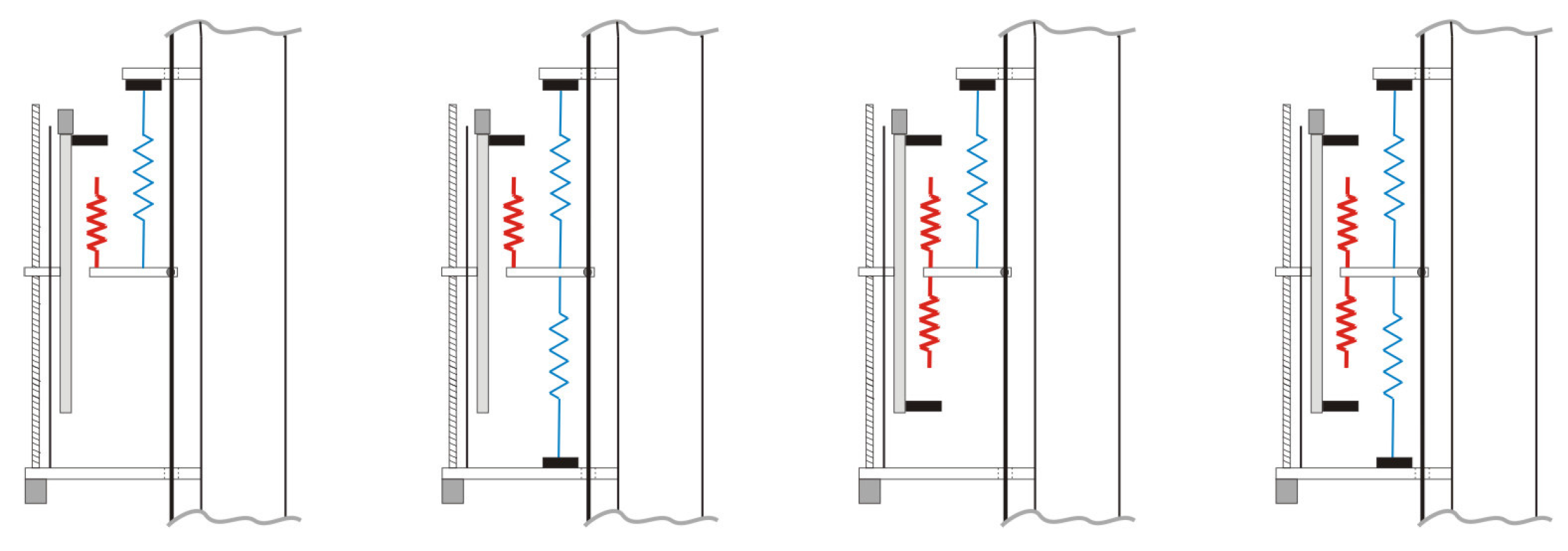
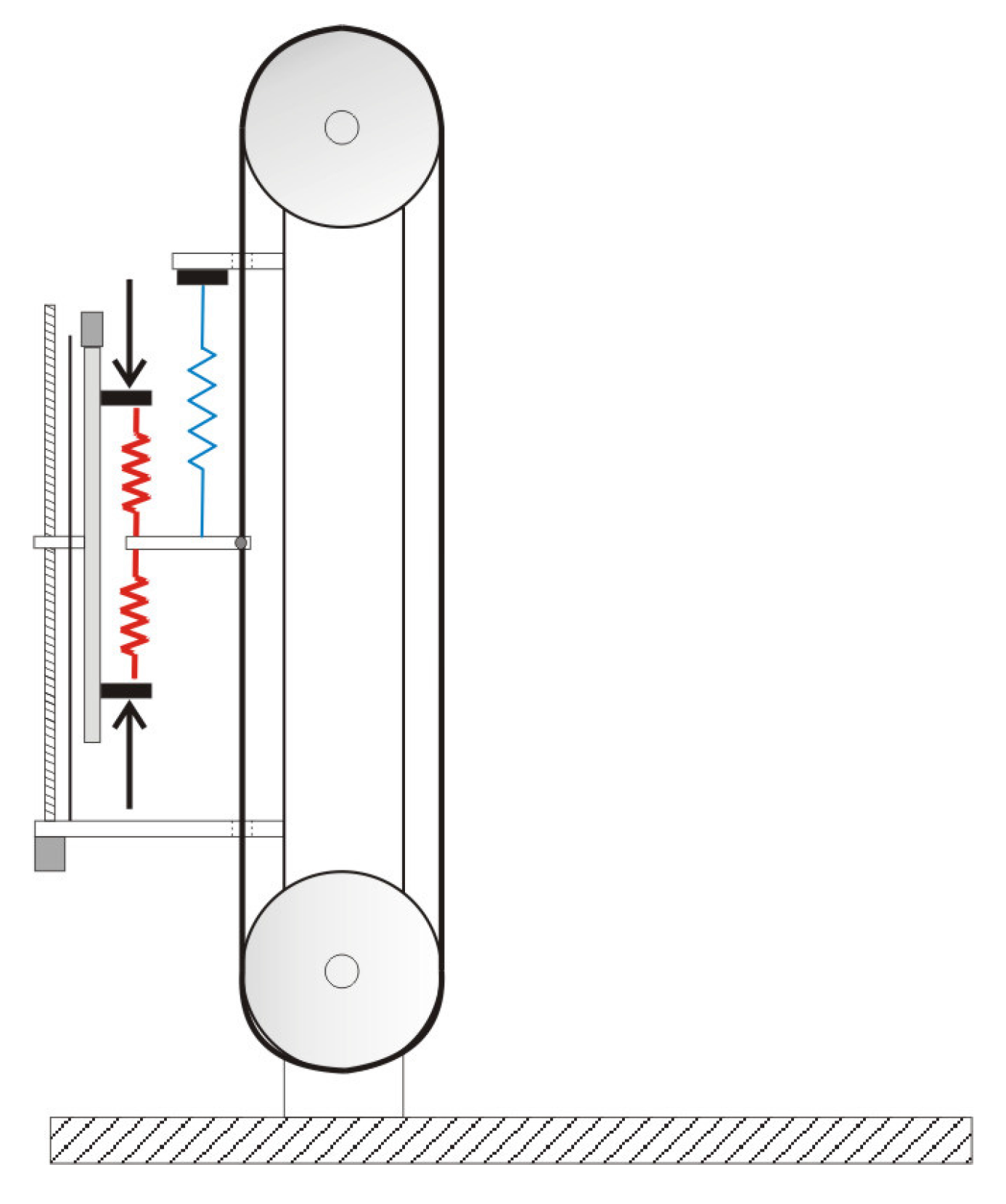
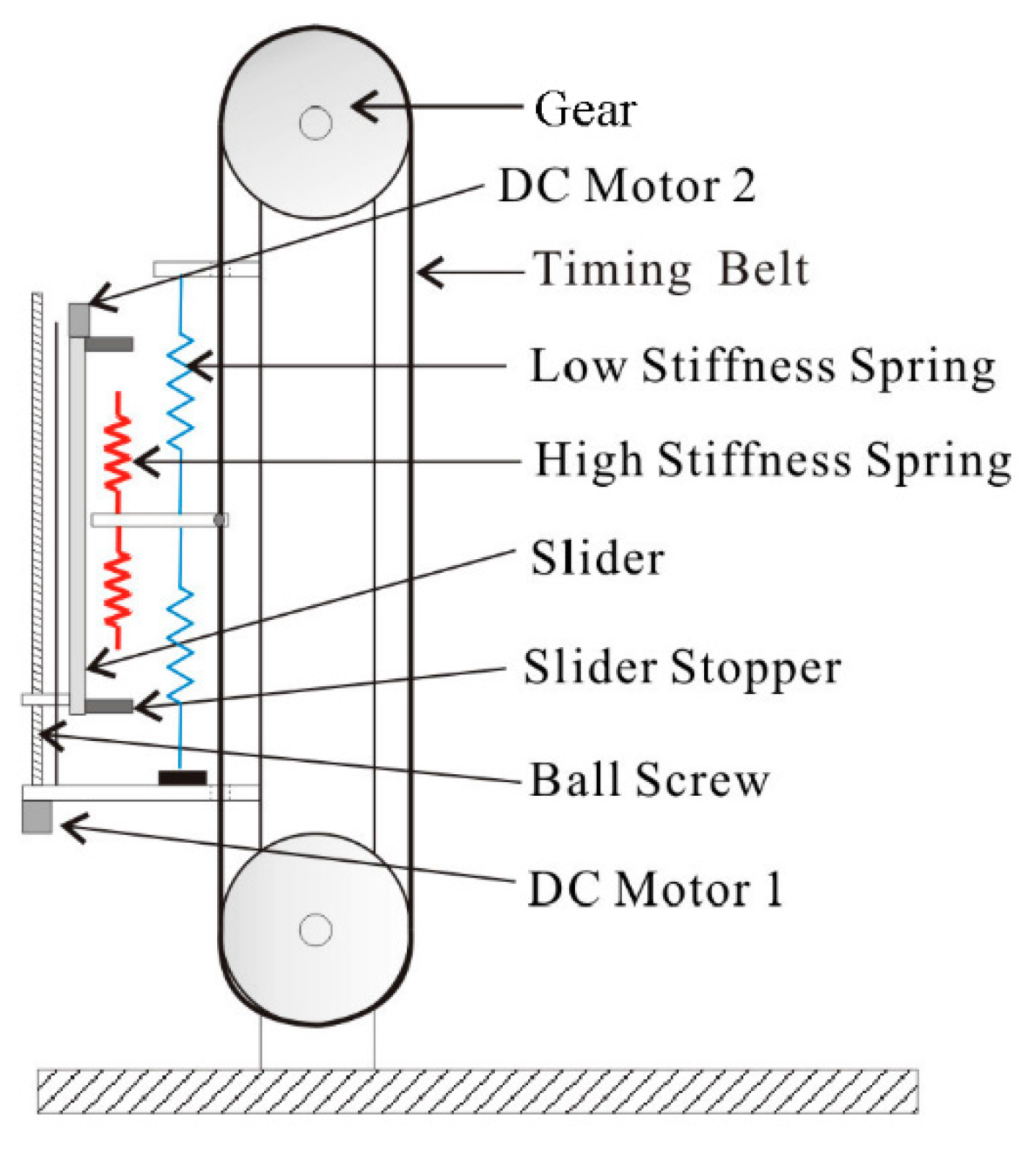
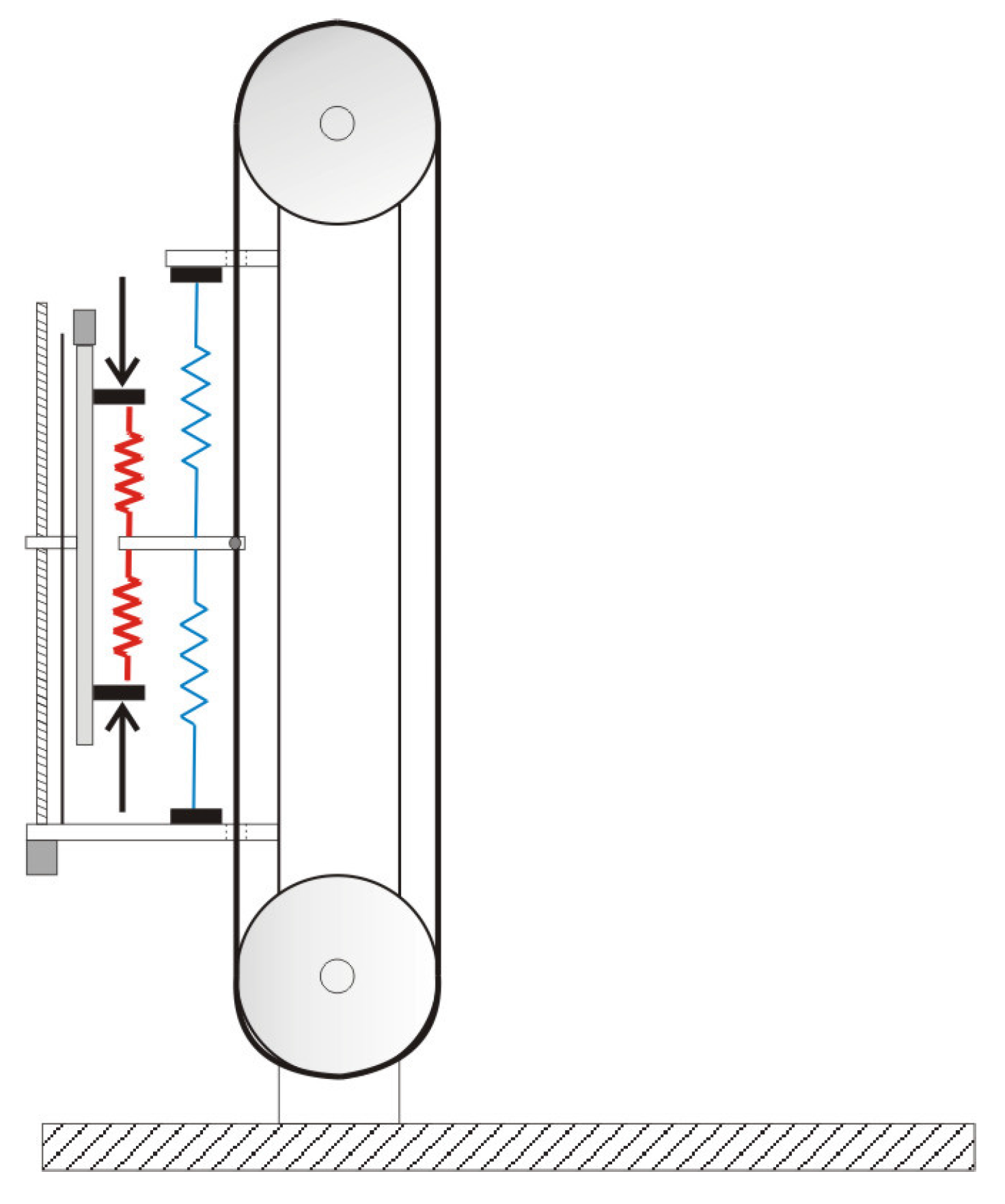
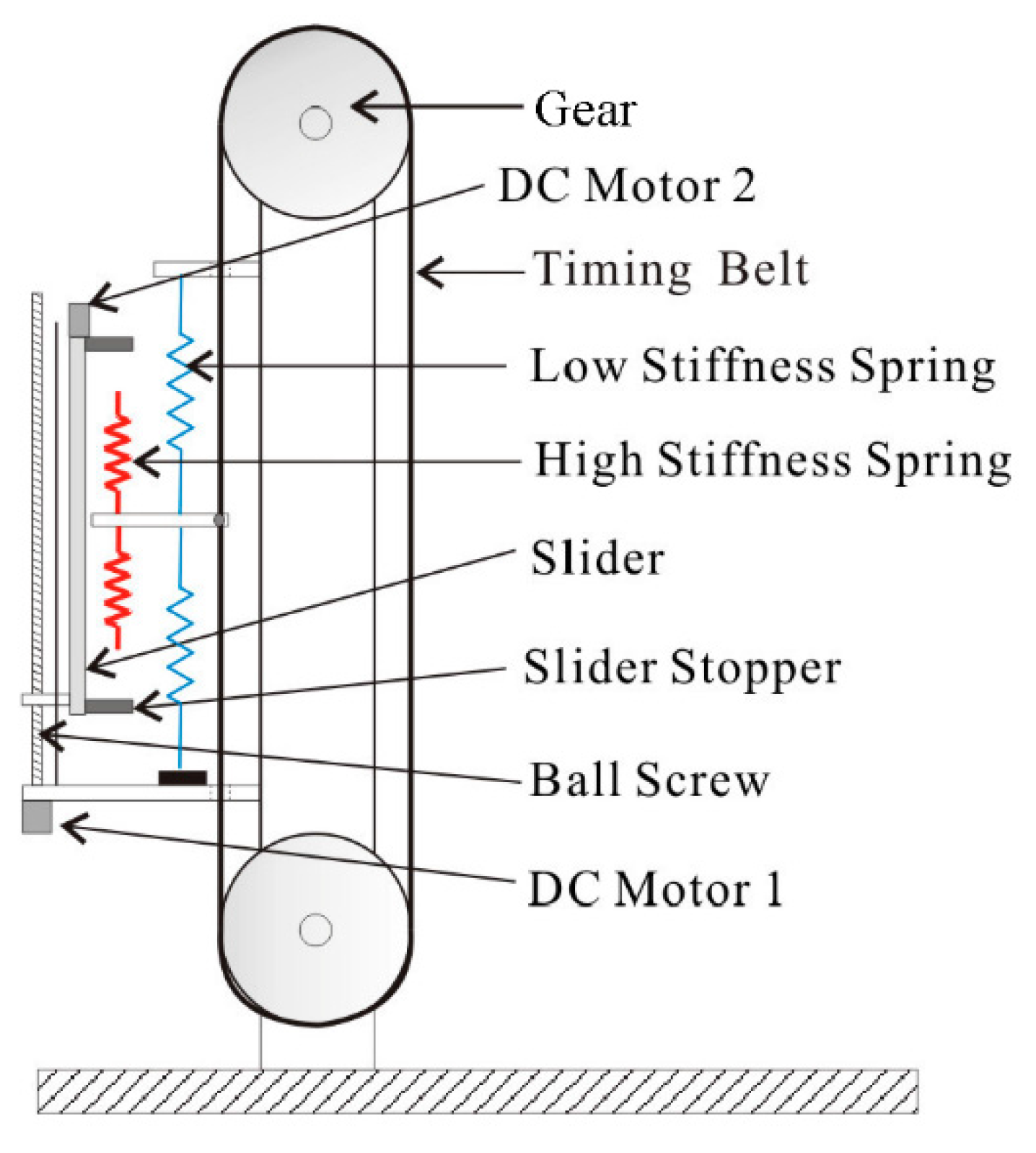
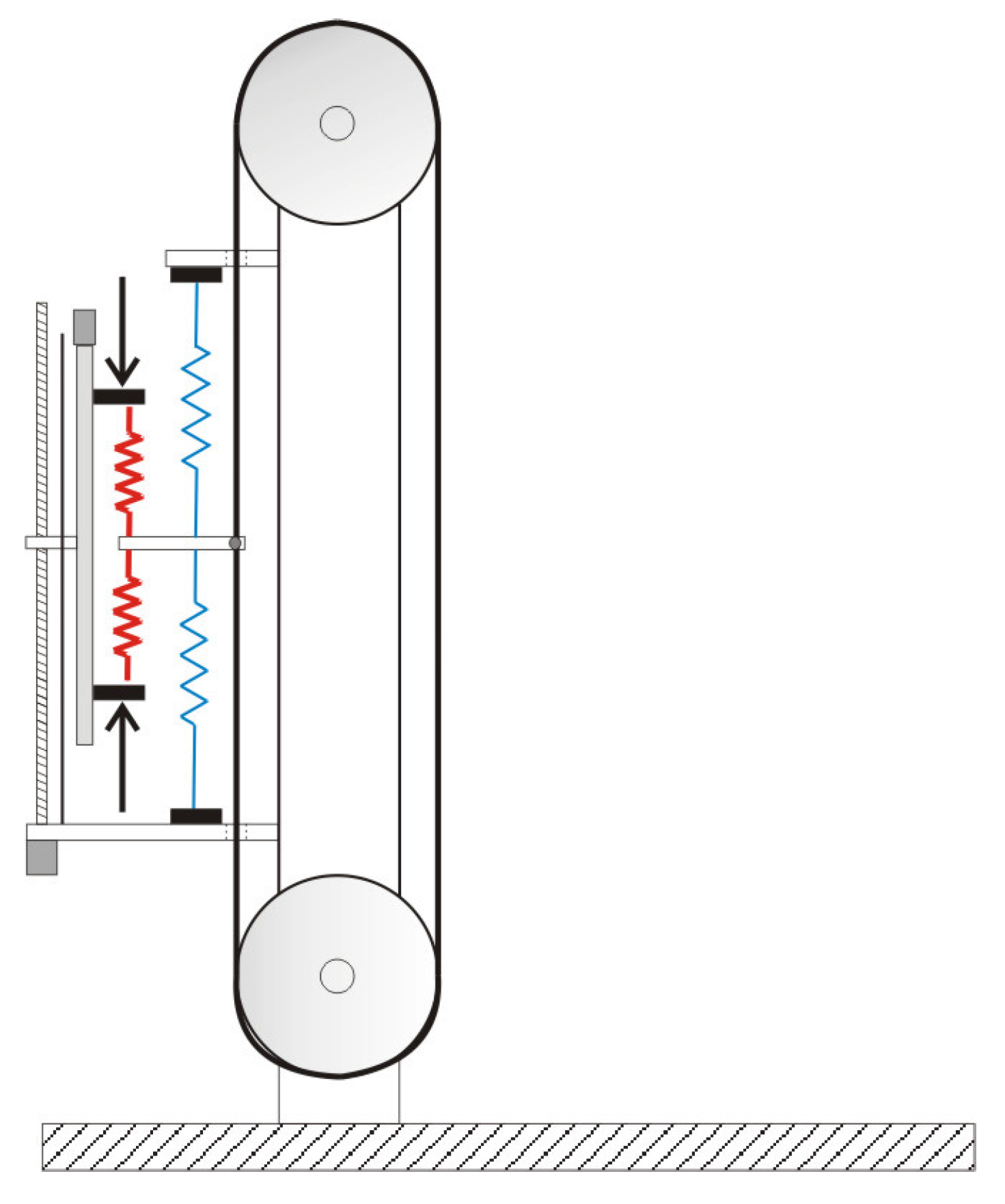
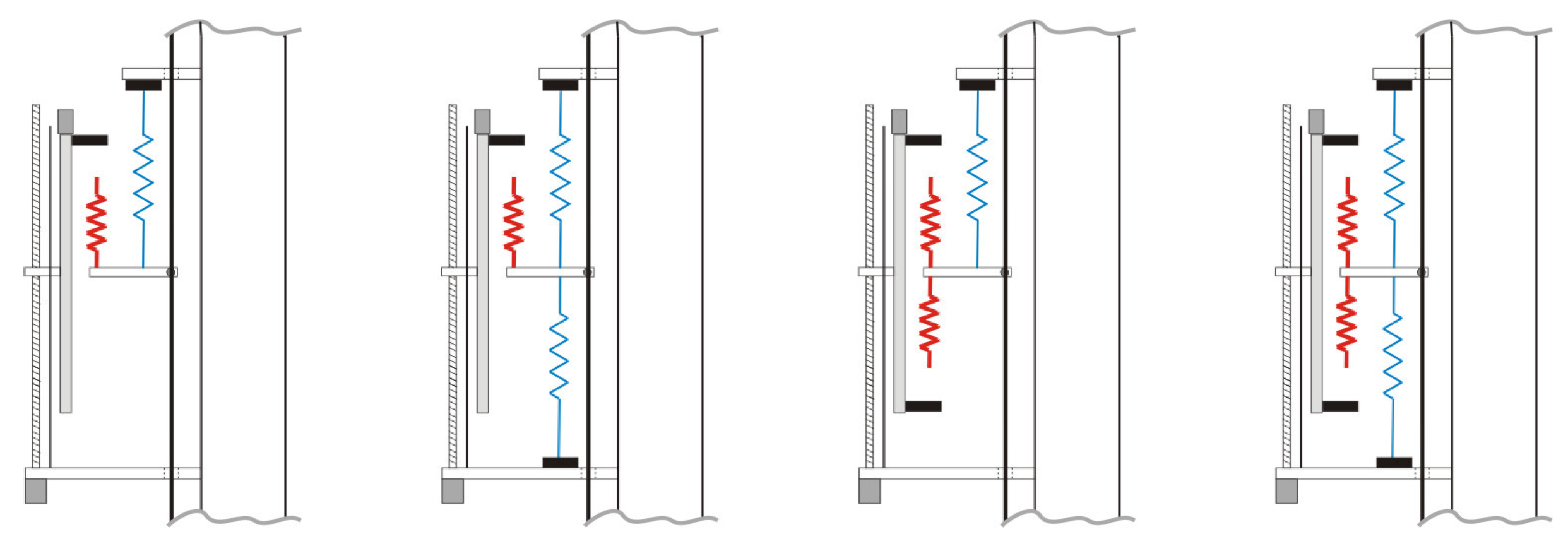
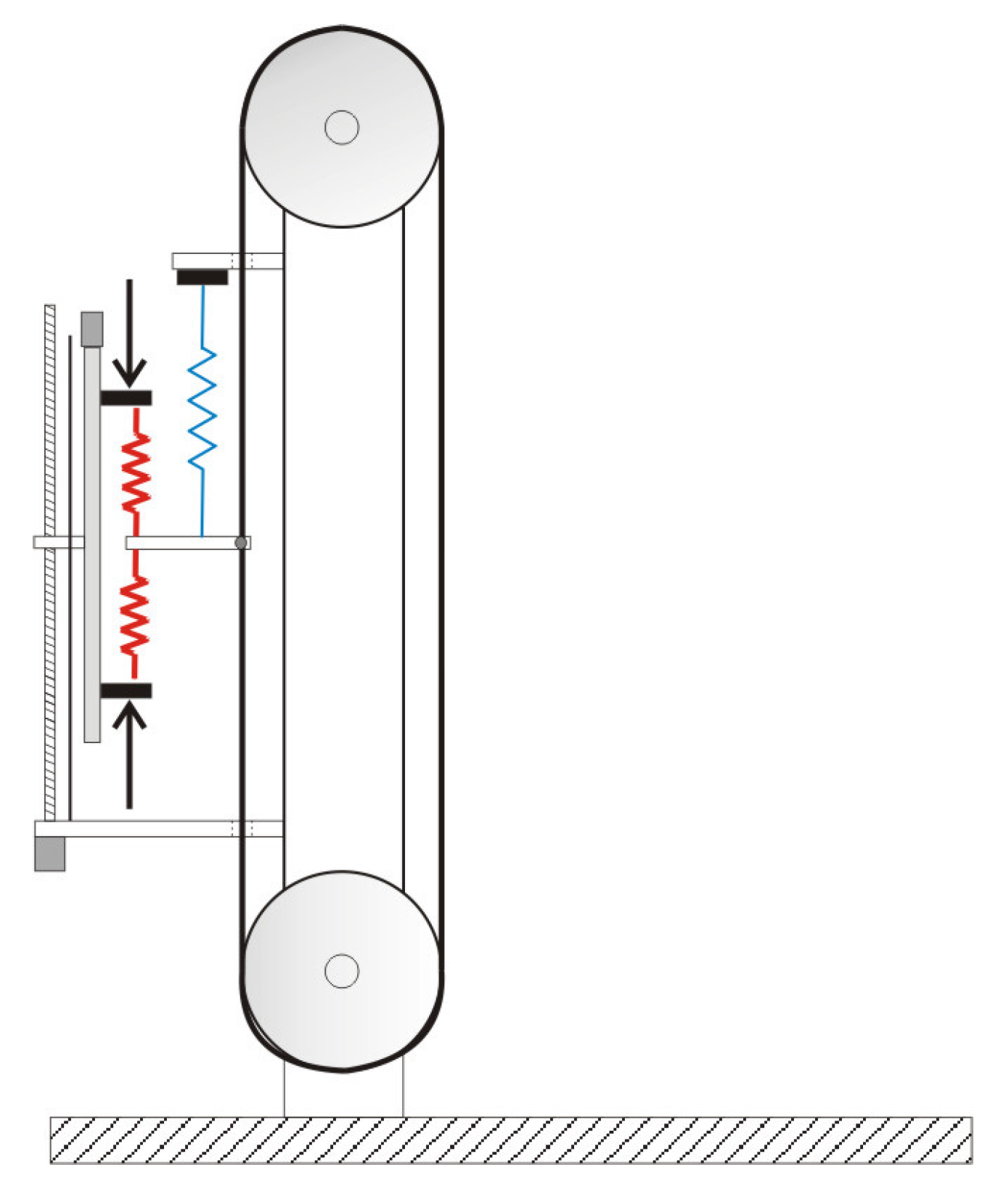
Our proposed design is an adjustable stiffness mechanism that would be able to provide the ankle joint with a hybrid type of rotational motion. The redesigned ankle joint would have the capability of switching between passive and active motion. We called the proposed mechanism a “Bi-directional Adjustable Stiffness Artificial Tendon” (BIASAT). As shown in
Figure 6, the mechanism consists of two sets of parallel compression springs with different stiffness values and with an offset (
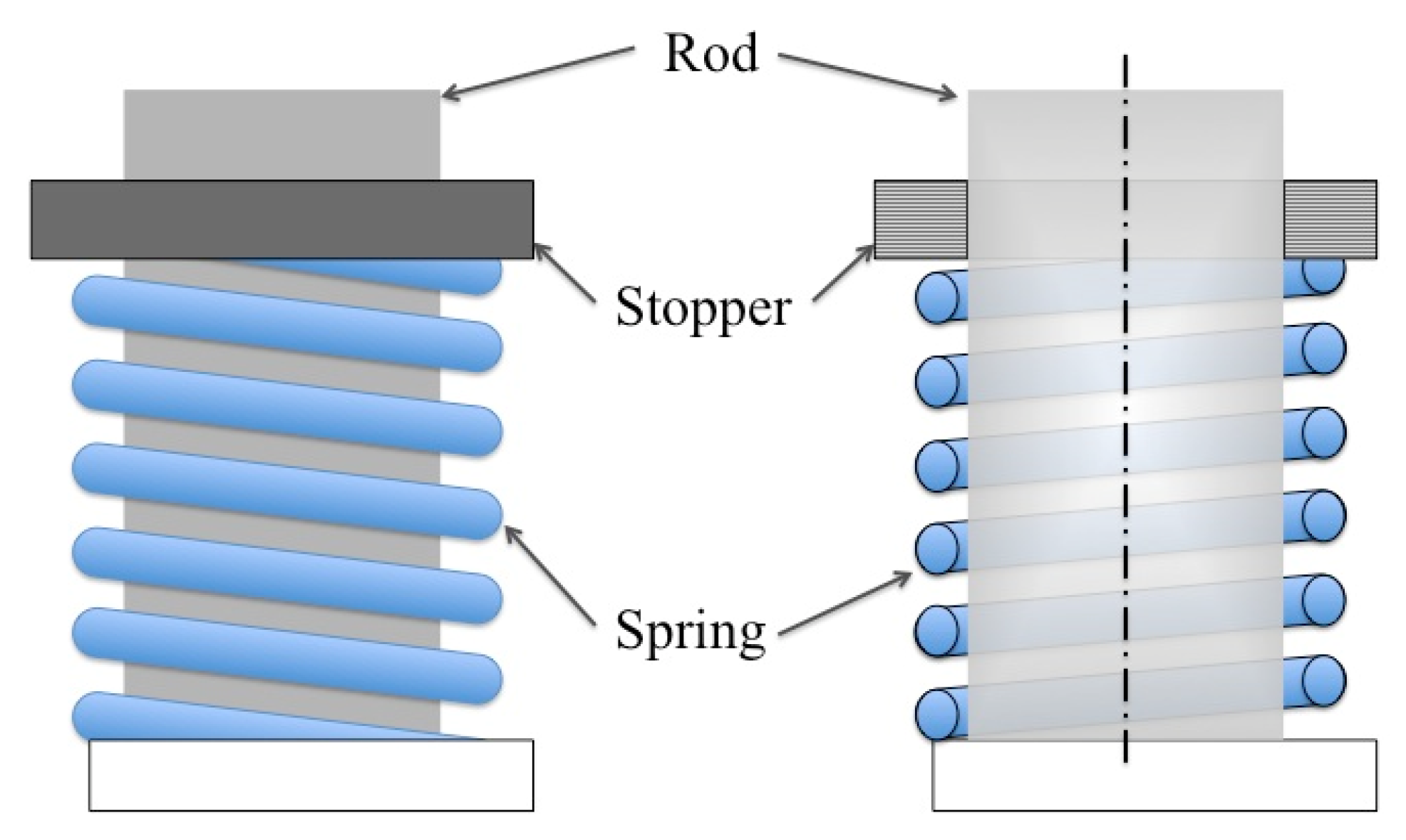
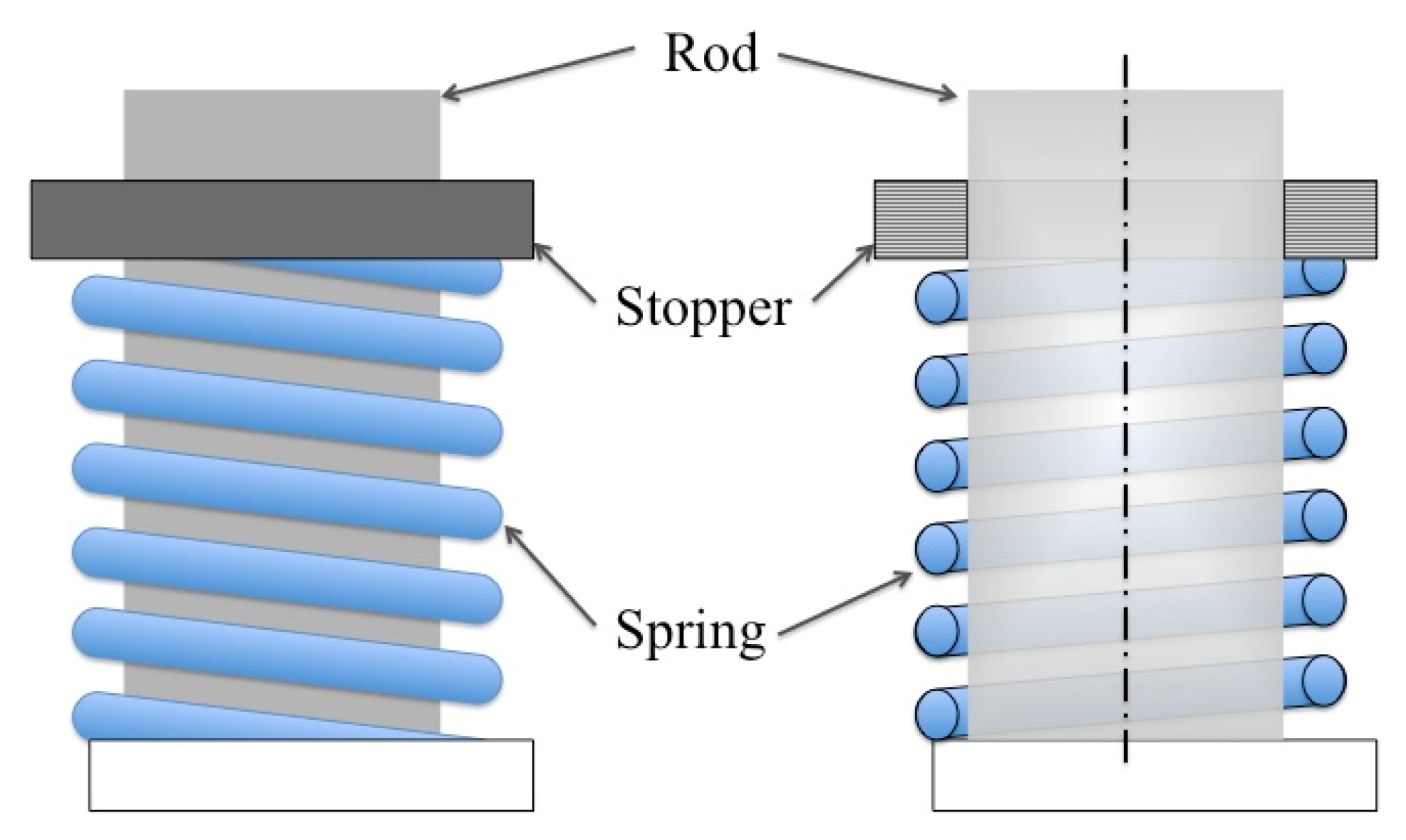
Figure 7) connected to the output link. The output link is connected to a timing belt, which goes around the gear directly attached to the ankle pitch joint. A rod is placed inside each spring to keep it upright and to prevent it from bending or slipping (
Figure 8). The two springs have an offset between them with a constant value (
Figure 7). The input link is connected to Spring 1 (with low stiffness). The input link is also connected to a moveable slider mechanism with a ball screw rotated by an actuator (DC Motor 1) that positions the slider (
Figure 6). The slider mechanism differentially adapts the offset between Spring 1 (low stiffness) and Spring 2 (high stiffness). Thus, it increases the stiffness in one direction and at the same time decreases in the other direction. On the other hand, the second actuator (DC Motor 2) can be used to control the position of both stoppers, which can increase or decrease the offset in both direction. Unlike the first actuator, the second actuator can be used to increase the stiffness in both directions. DC Motor 2 has an advantage in the controllability of the tendon stiffness that can control switching between active and passive modes.
Figure 6.
Design outline of the BIASAT mechanism attached to the ankle pitch joint.
Figure 6.
Design outline of the BIASAT mechanism attached to the ankle pitch joint.
Figure 7.
Schematic of the BIASAT mechanism.
Figure 7.
Schematic of the BIASAT mechanism.
Figure 8.
The model of spring mechanism with the rod.
Figure 8.
The model of spring mechanism with the rod.
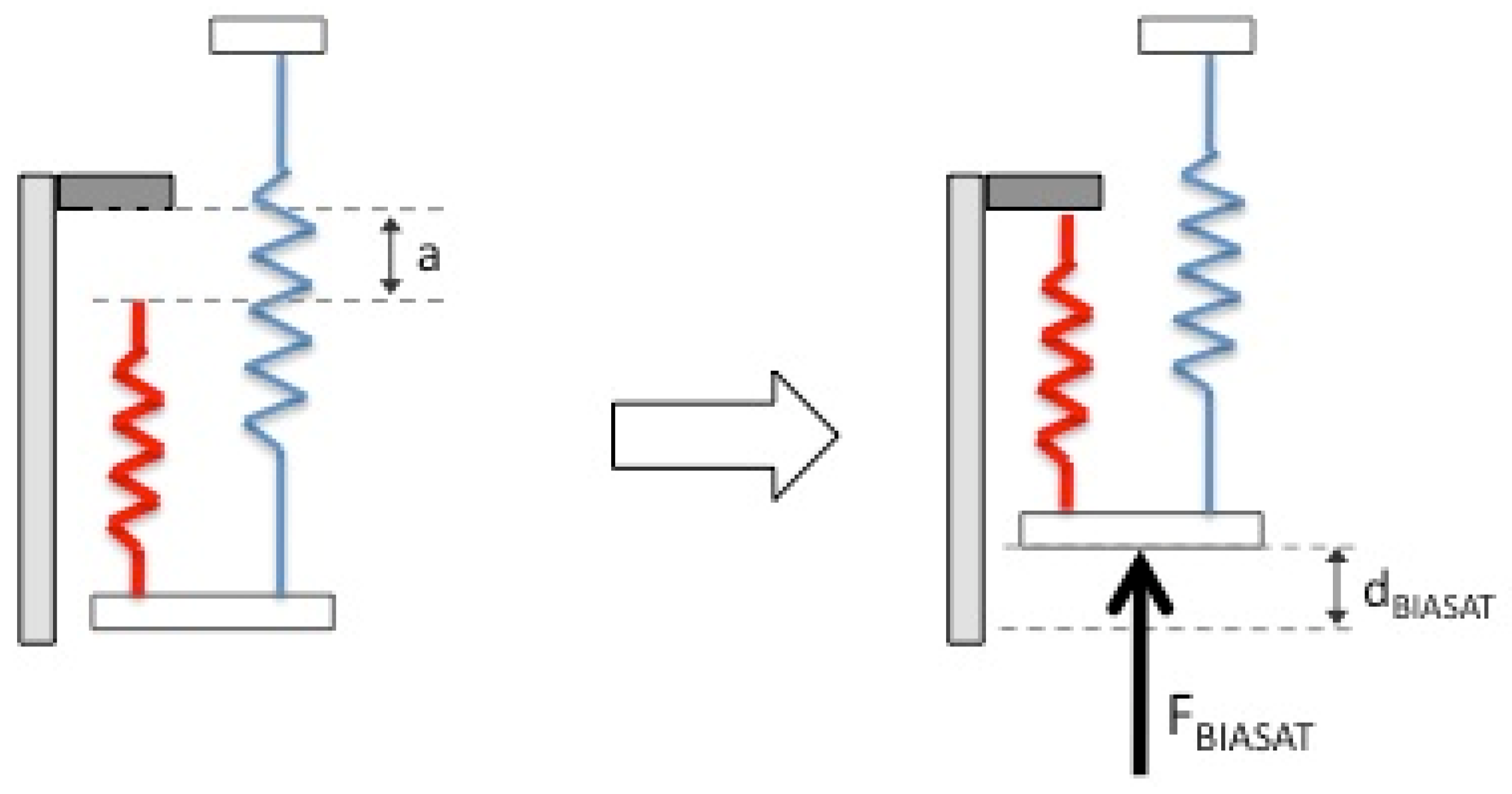
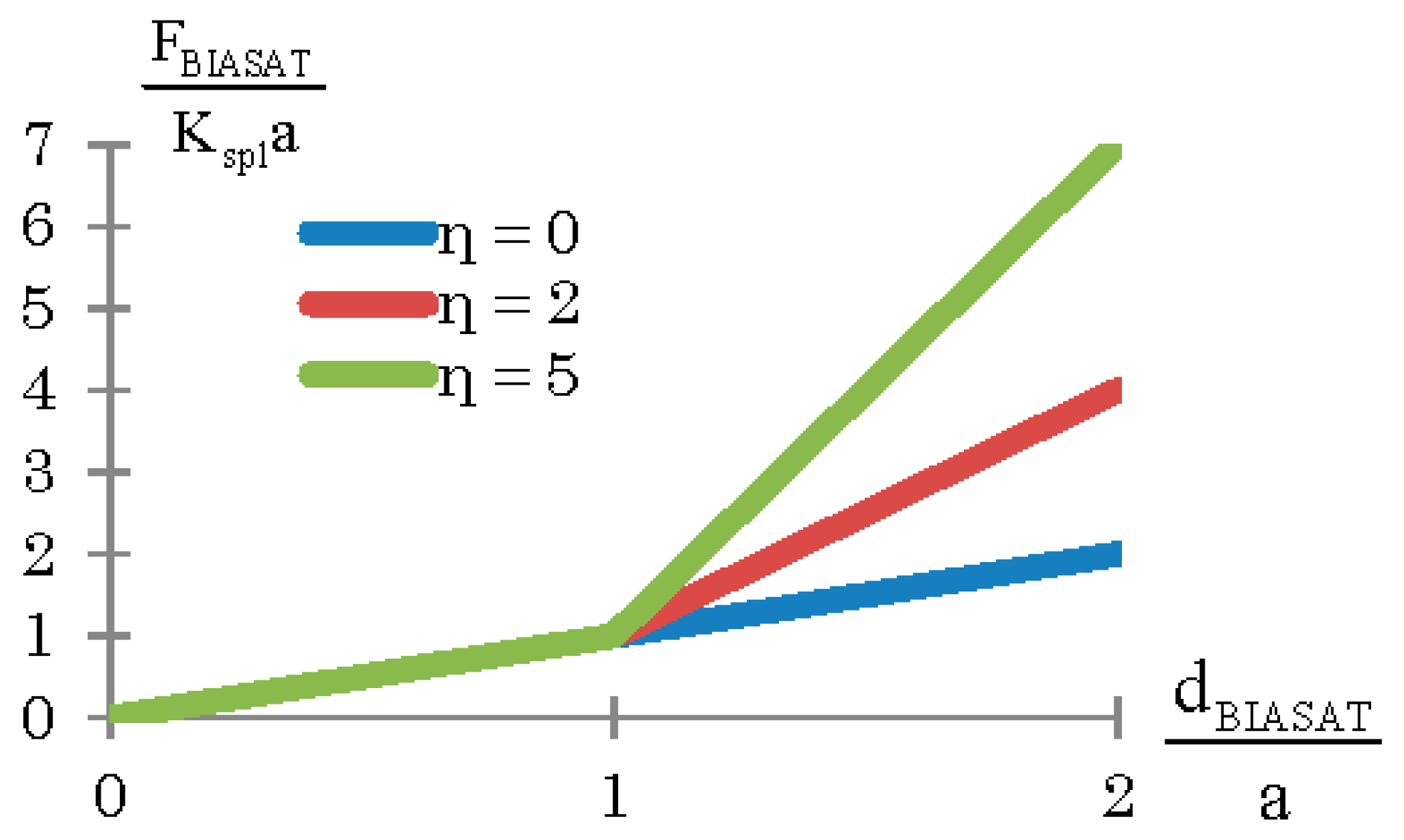
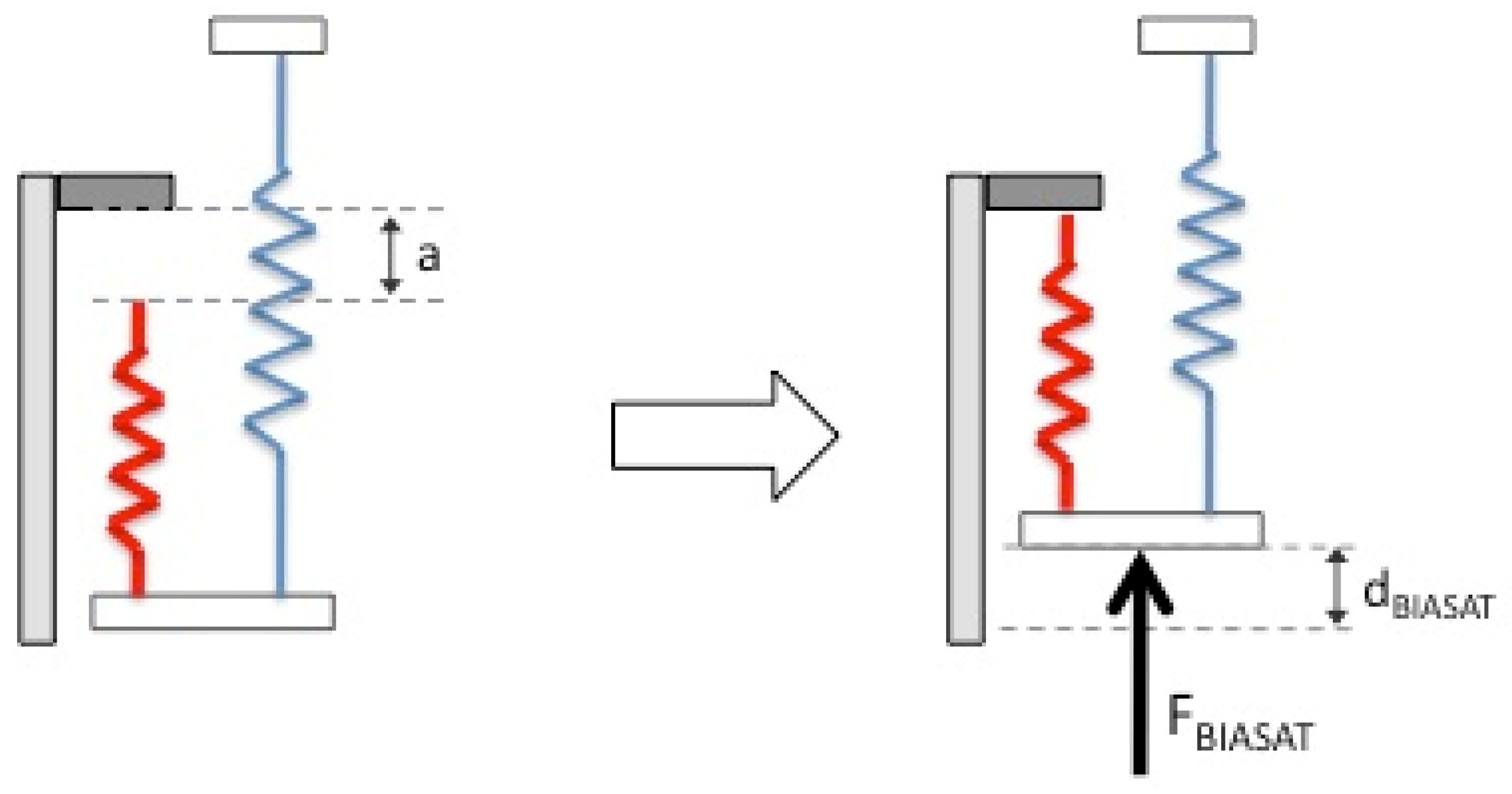
The distance a, which is the distance between the high stiffness spring endpoint and the slider stopper, is a controllable parameter (
Figure 7). The closer the stopper is to the spring, the greater the potential output of the applied force. The applied force, F
BIASAT, could be determined as follows:
where K
sp1 is the stiffness of Spring 1 (low stiffness), K
sp2 is the stiffness of Spring 2 (high stiffness), a is the offset (distance between the spring endpoint and the stopper), and d
BIASAT is the spring’s deflection at the end point. Equation (1) could be reformed to a dimensionless form in which K
SP2 is replaced by ηK
sp1, which is as follows:
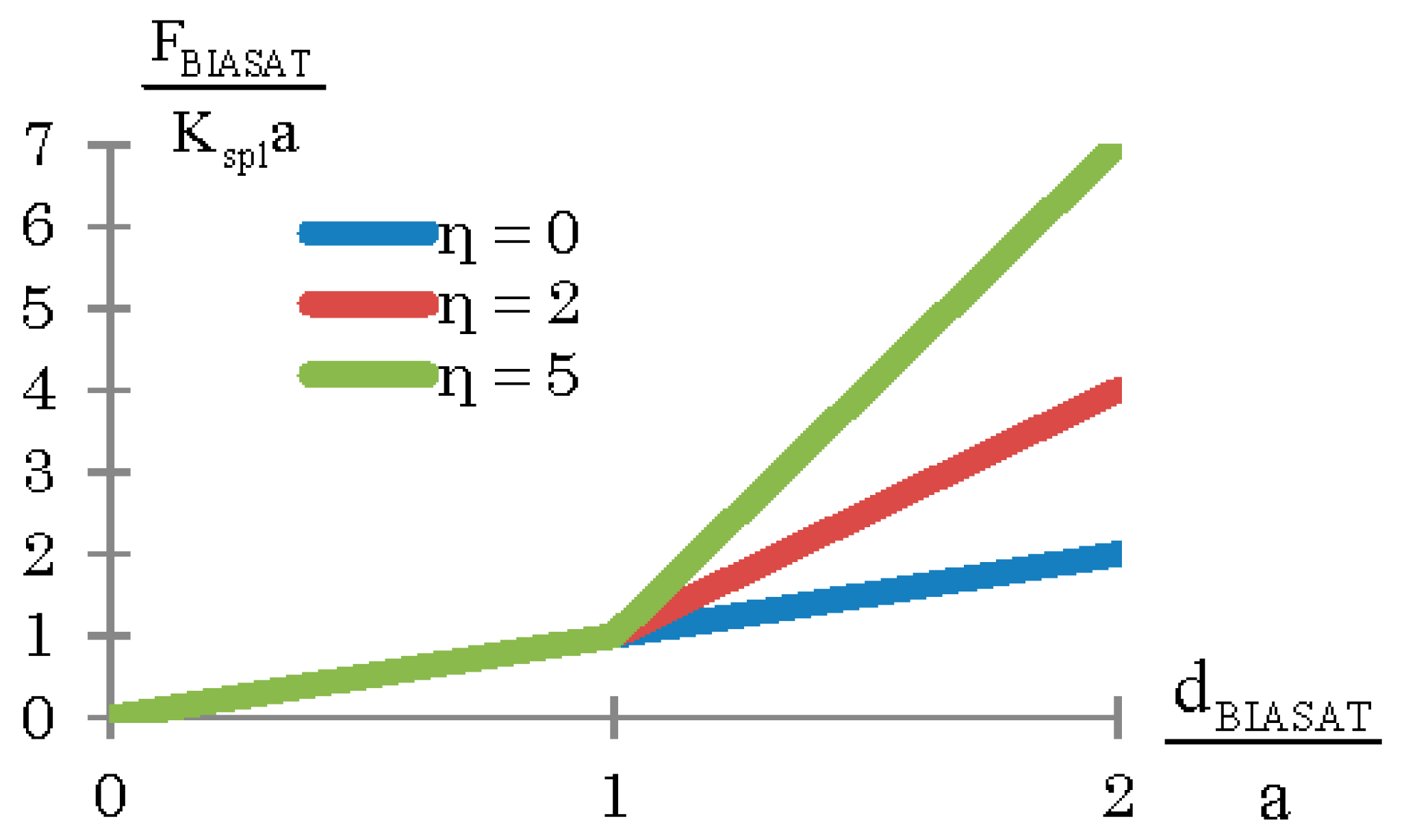
The force-deflection graph of the BIASAT is illustrated in
Figure 8. η is the ratio of the stiffness of Spring 2 to that of Spring 1 (η = [0, 2, 5] in
Figure 9). The slopes of the straight lines in
Figure 8 represent the stiffness of the BIASAT. The stiffness is suddenly switched from the stiffness of Spring 1, K
sp1, to the stiffness of two parallel springs, (η + 1) K
sp1, at point d
BIASAT = a.
Figure 9.
Dimensionless force-deformation graph of BIASAT in passive mode for different η values.
Figure 9.
Dimensionless force-deformation graph of BIASAT in passive mode for different η values.
The mechanical design of the BIASAT has the advantage of switching between passive and active modes. Pushing into the two high stiffness springs using DC Motor 2, as shown in
Figure 10, sets the control mode of the mechanism. The amount of compression on the spring will determine the amount of potential compliance. The output force, F
BIASAT, can be determined as follows:
where Δd
0 is the amount of displacement in the high stiffness spring that is cased by DC Motor 2, and d
in is the input displacement made by DC Motor 1. Equation (3) can be rewritten as follows:
Equation (4) shows that the output force, FBIASAT, depends only on the input position of DC Motor 1 and the measured position of the mechanism, which will be based on the ankle joint angle. However, from a practical point of view, compression springs are not linear. The output force increases sharply when the compressed displacement increases, which means that the amount of stiffness increases. Therefore, to increase the stiffness of ankle joint in the active mode, more compression to the high stiffness spring must be applied.
Figure 10.
The active mode of BIASAT mechanism. The stoppers are moved toward the high stiffness spring using DC Motor 2.
Figure 10.
The active mode of BIASAT mechanism. The stoppers are moved toward the high stiffness spring using DC Motor 2.
7. Implementation Challenges
In light of the simulation analysis we conducted on the performance of the Bi-directional Adjustable Stiffness Artificial Tendon (BIASAT), we expect that such a mechanism could help to increase the energy efficiency of bipedal walking. However, there are several challenges to practically implement or build such a mechanism.
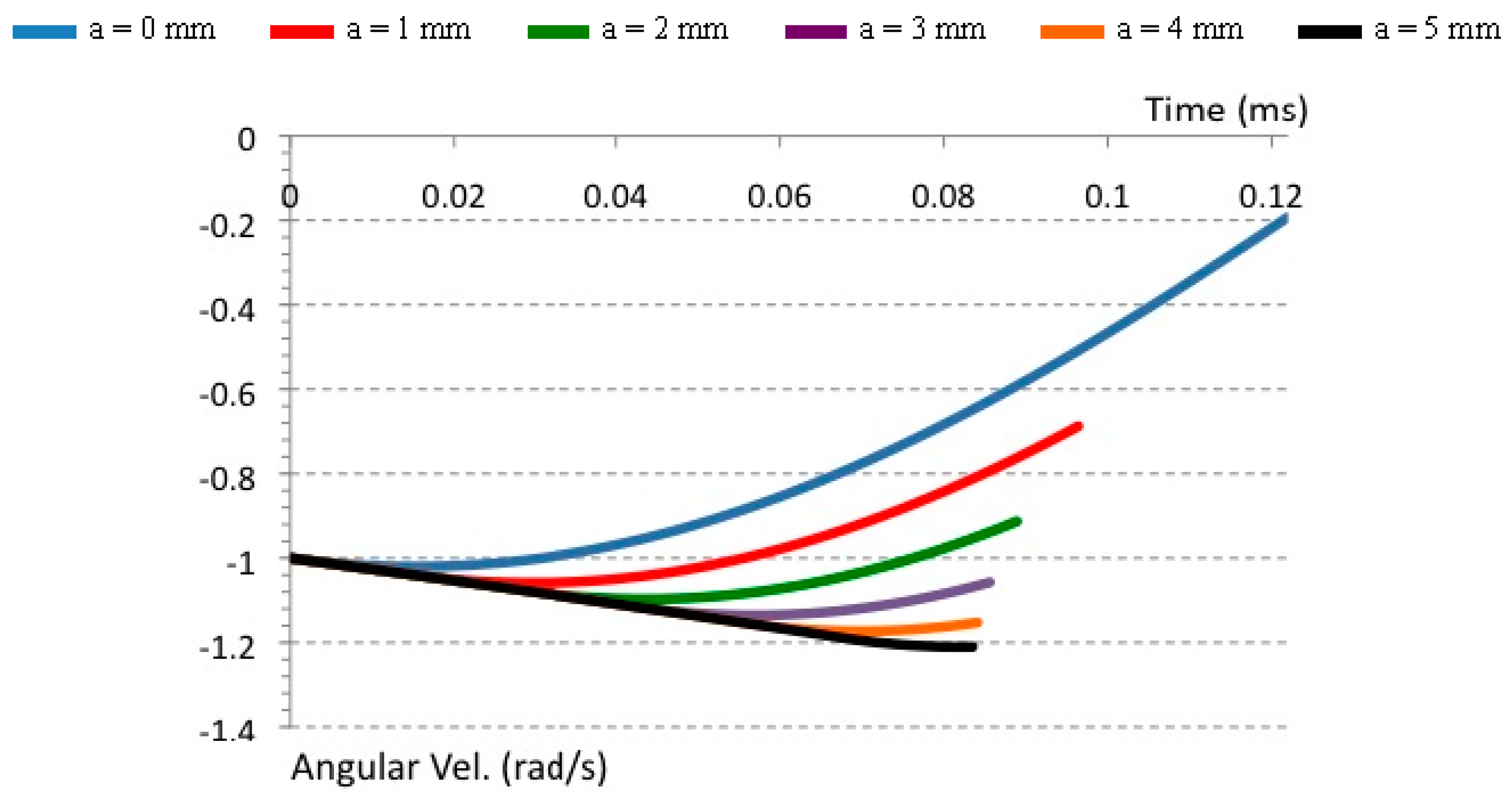
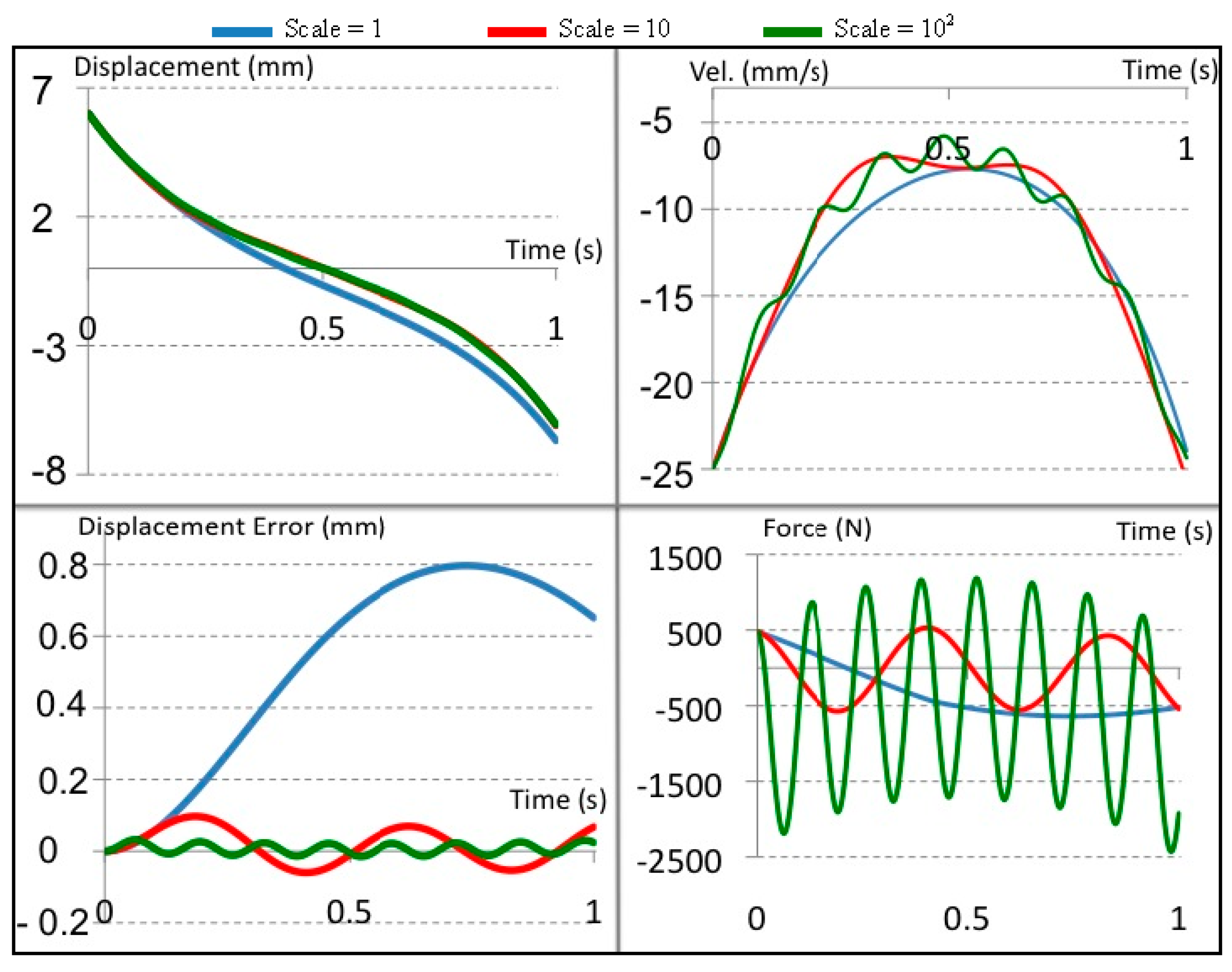
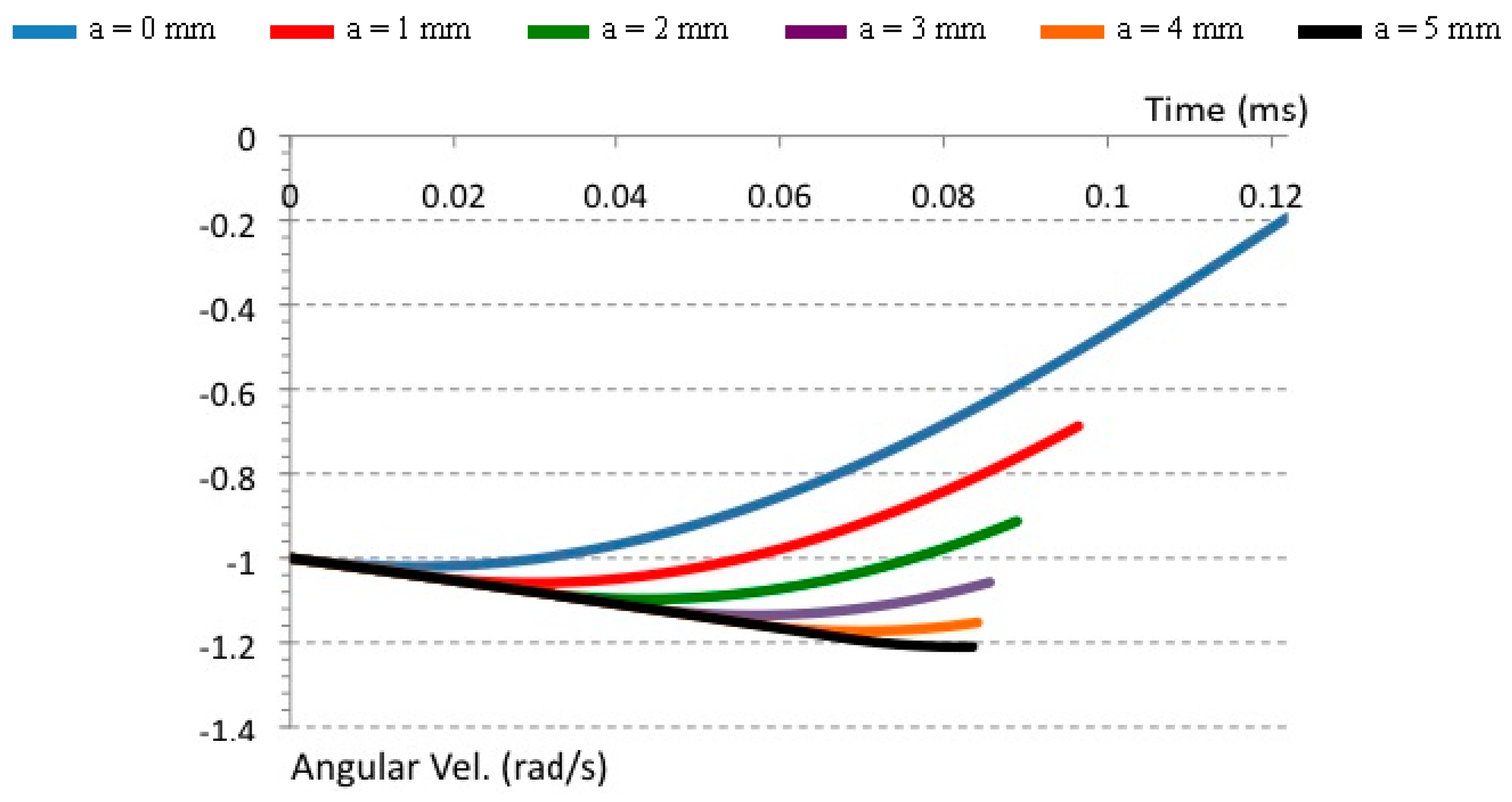
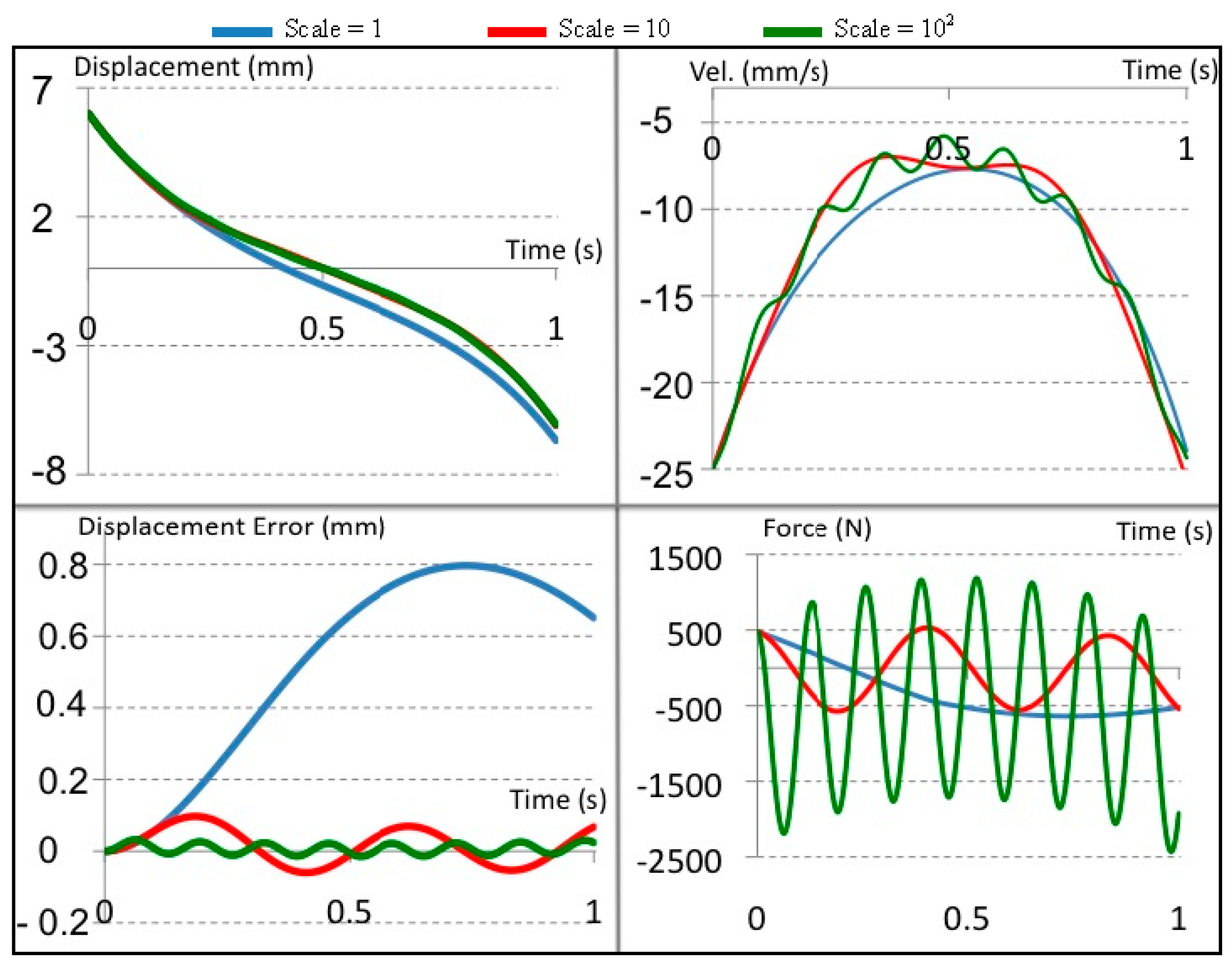
One of the main challenges is the limitation of actuation output force. As it is shown in
Figure 29, the force that the DC Motor needs to apply might reach 2.5 kN. It might be too large an amount of applied force for a small size actuator to produce. Even if a rotational motor with a ball screw was used, as we used in our design, the translational speed would have to be very low in order to support such a strong force. It might require a very high rotational speed to move the slide and keep the support of the large force.
Another challenge is to find a suitable spring device. Based on our work in [
25], finding a spring in a small size that could have a high stiffness could be difficult. We might need to carefully determine a spring constant value that is suitable for the locomotion characteristic of the bipedal robot.
The mechanical design of such a device might be easy to propose in this paper (see
Figure 6), but, practically, it will require many components that do not appear in the basic design. The actuator and the spring sizes might need to be much larger. To assemble so many components with a large size within limited space is a real challenge.
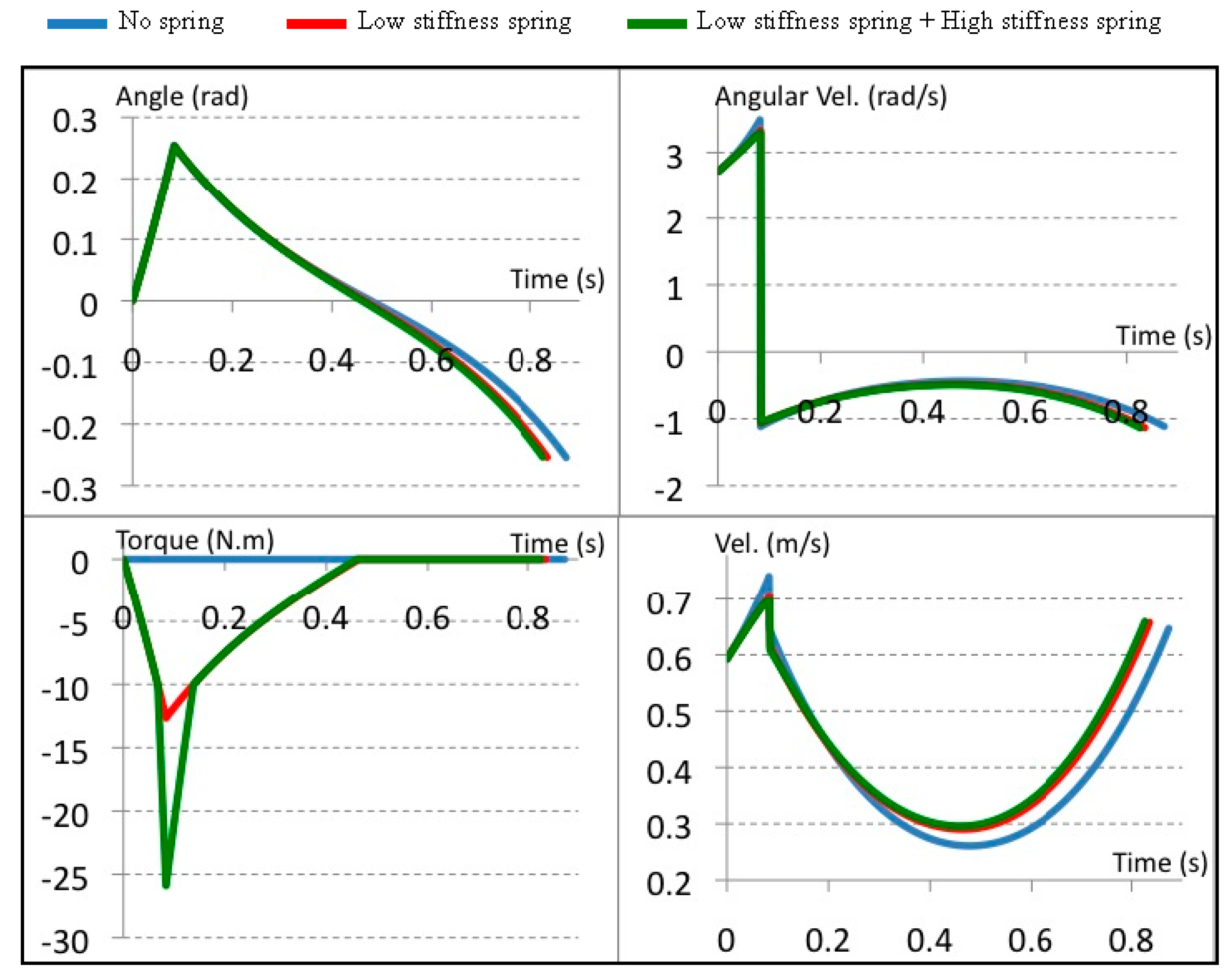
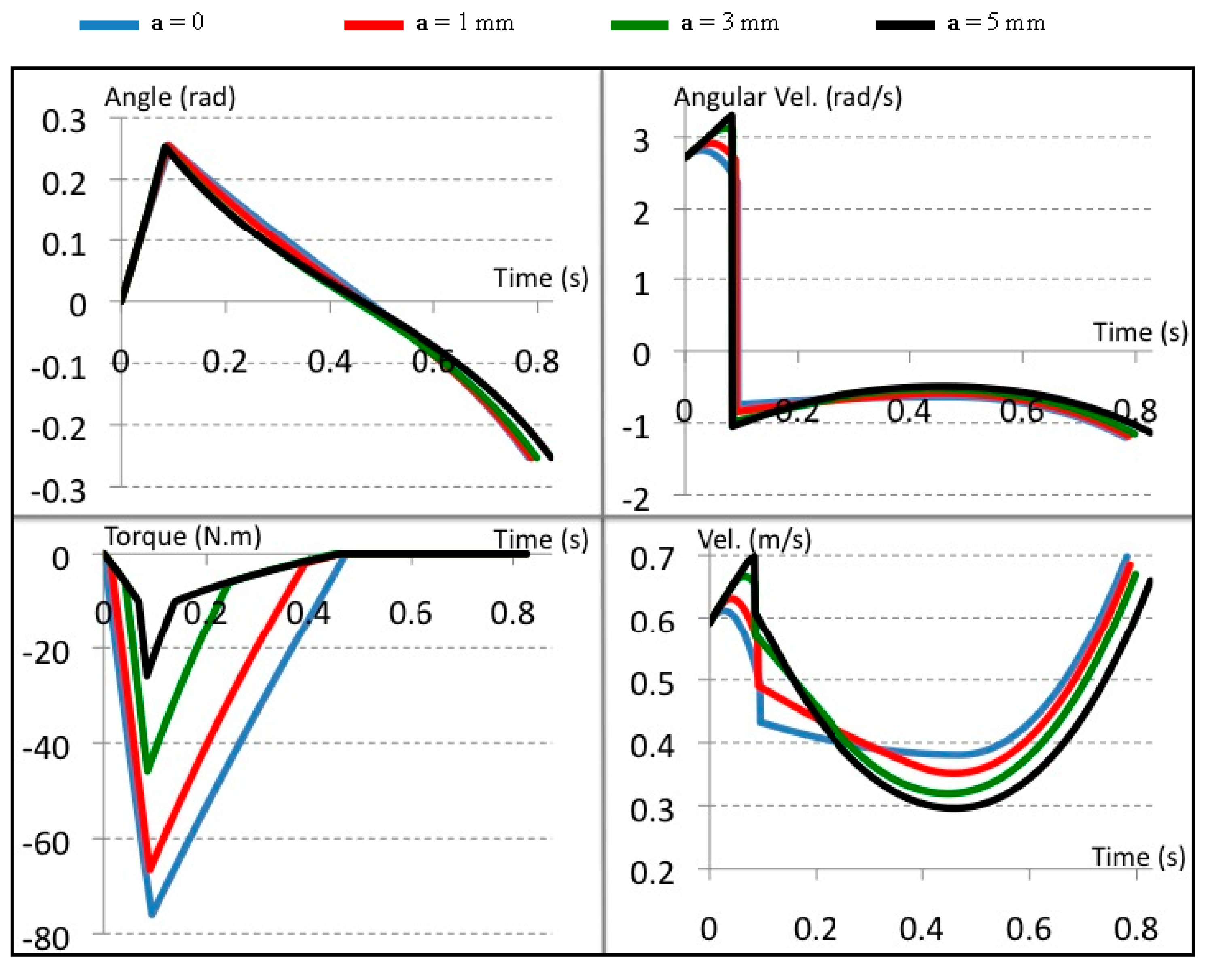
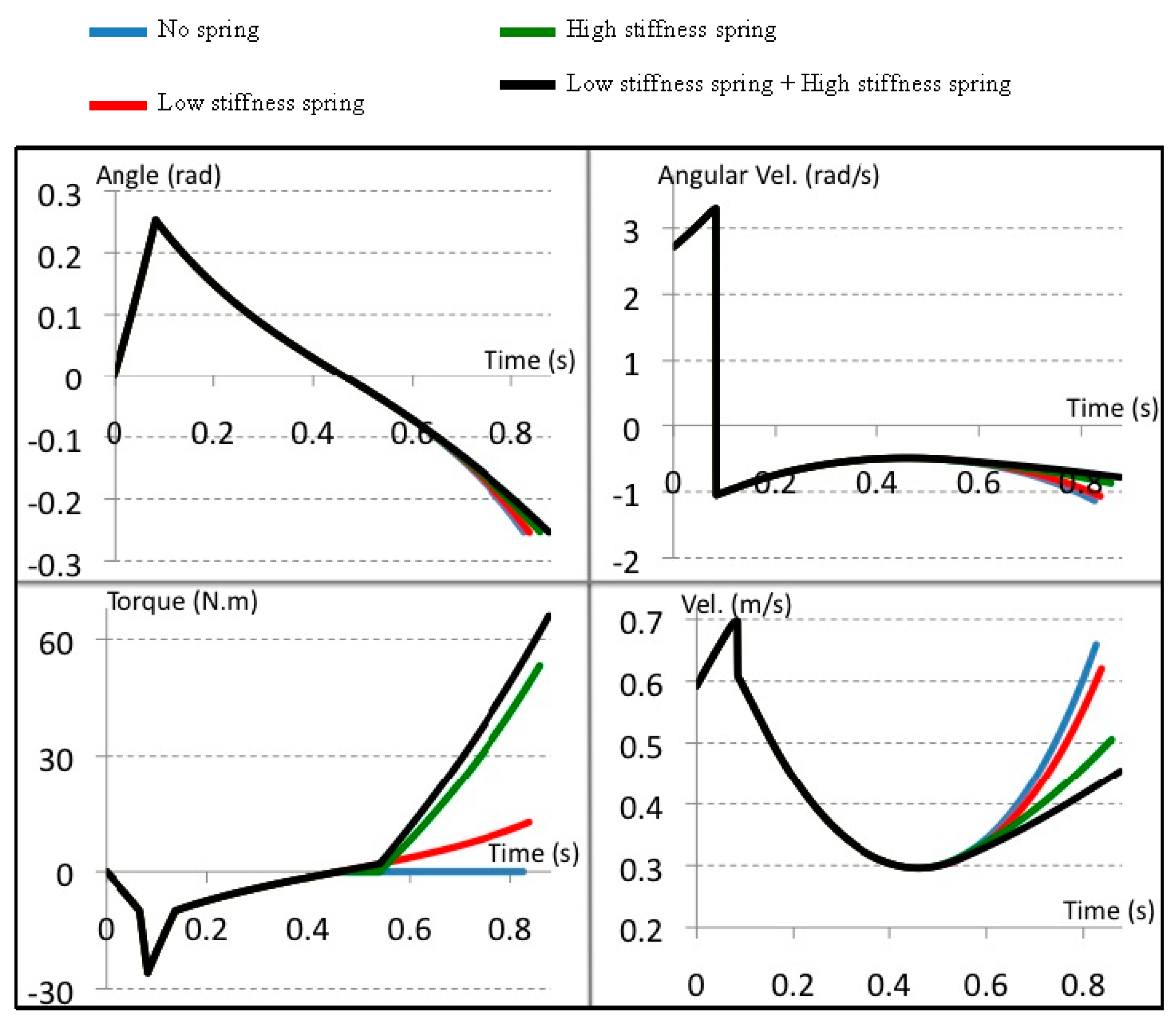
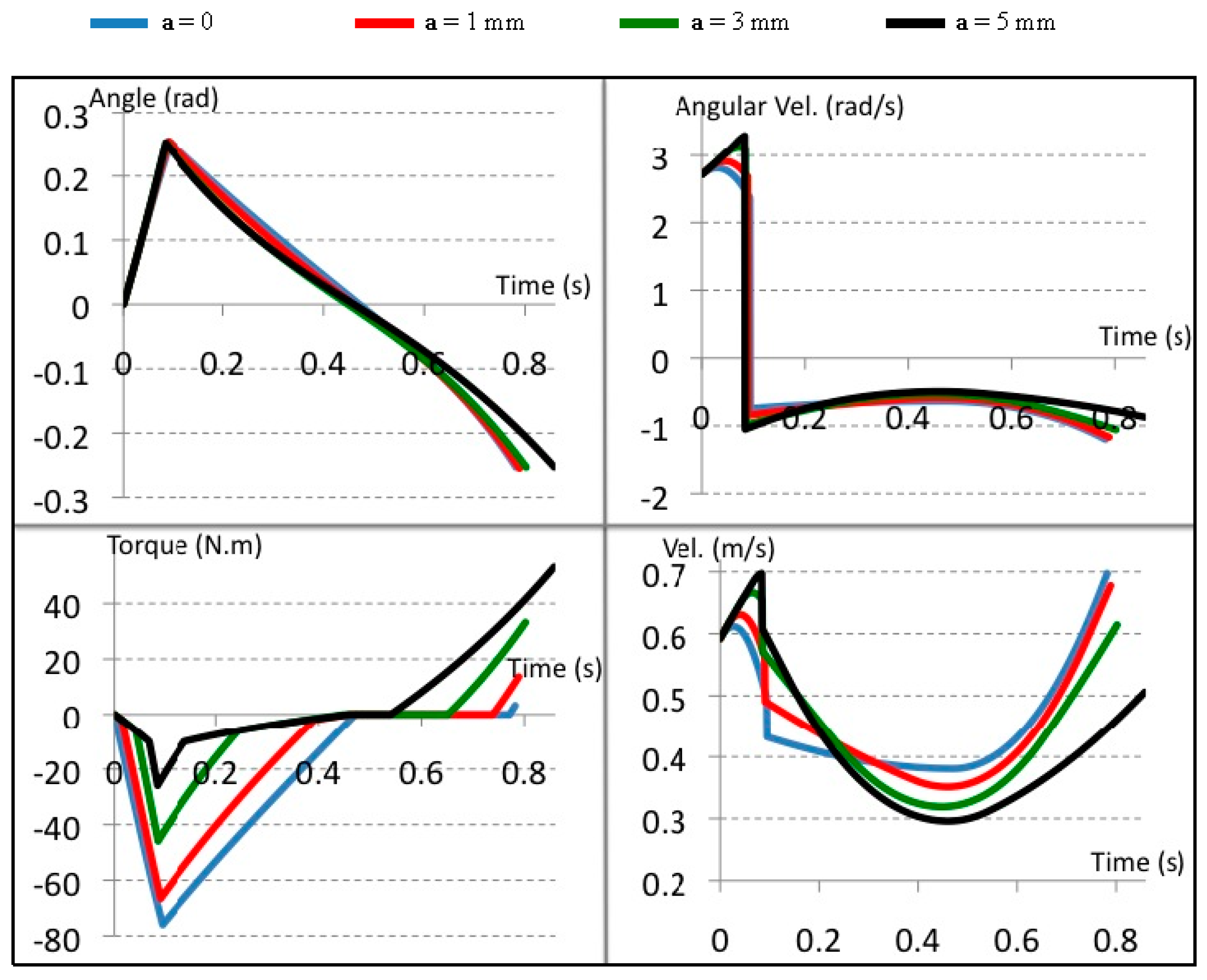
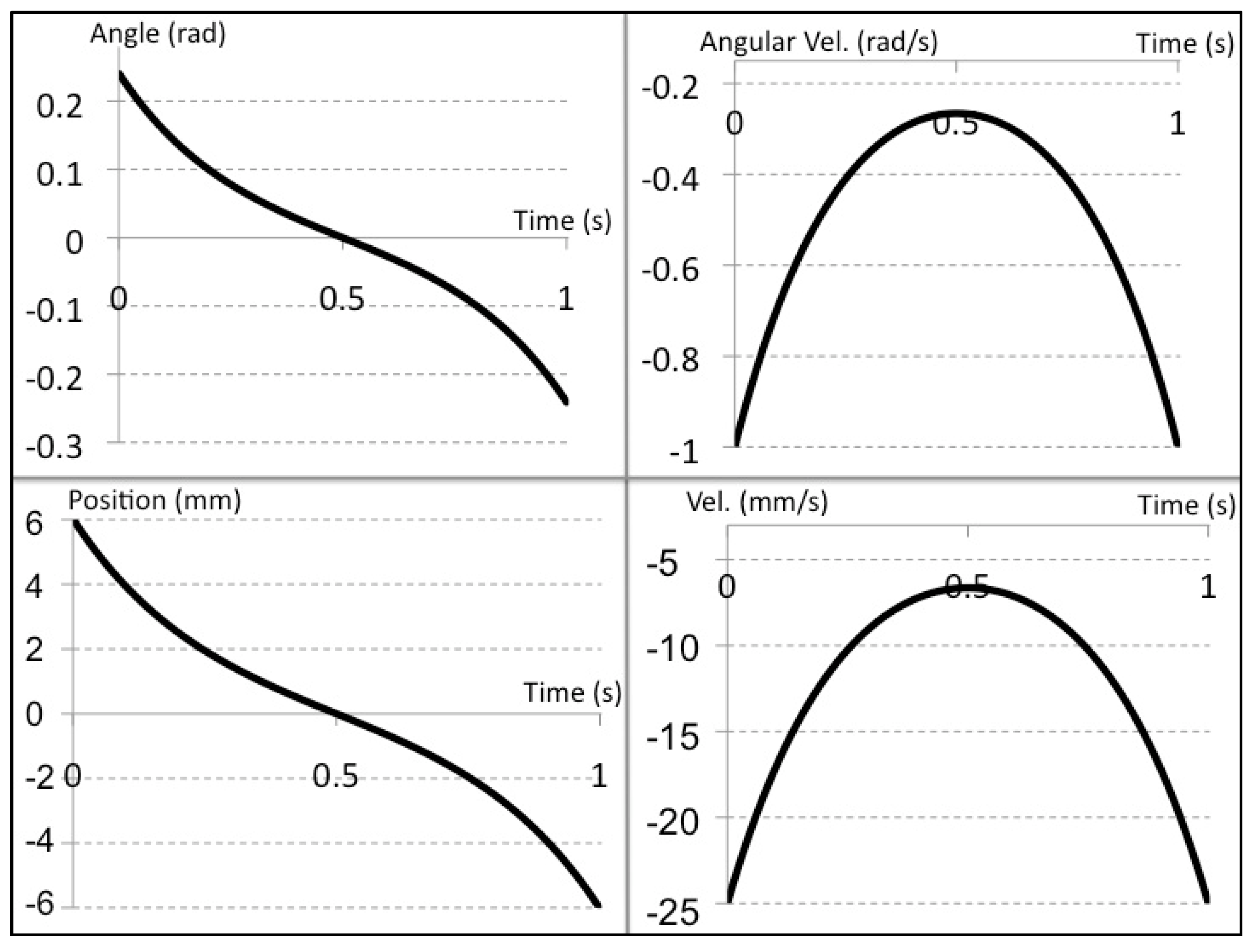
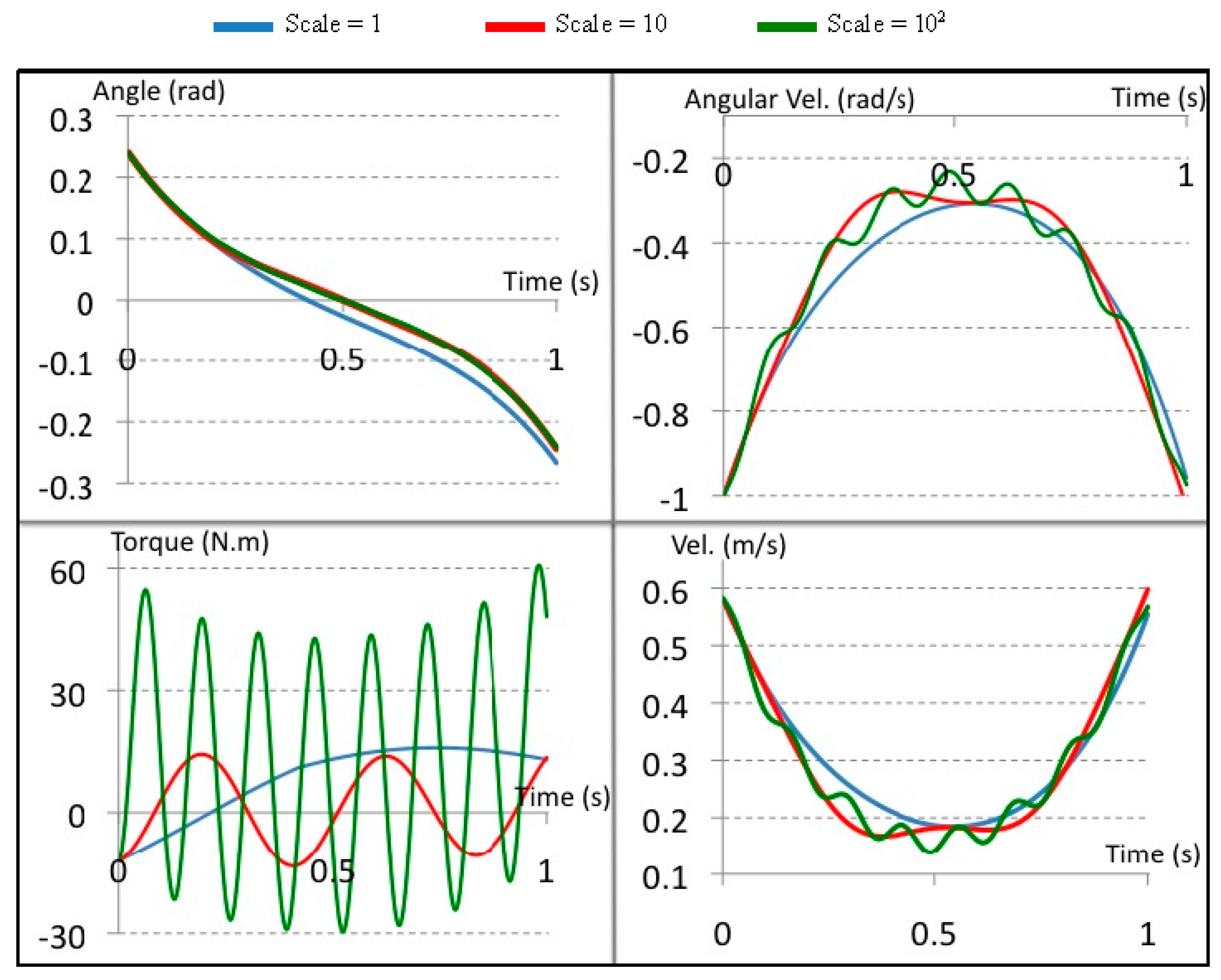
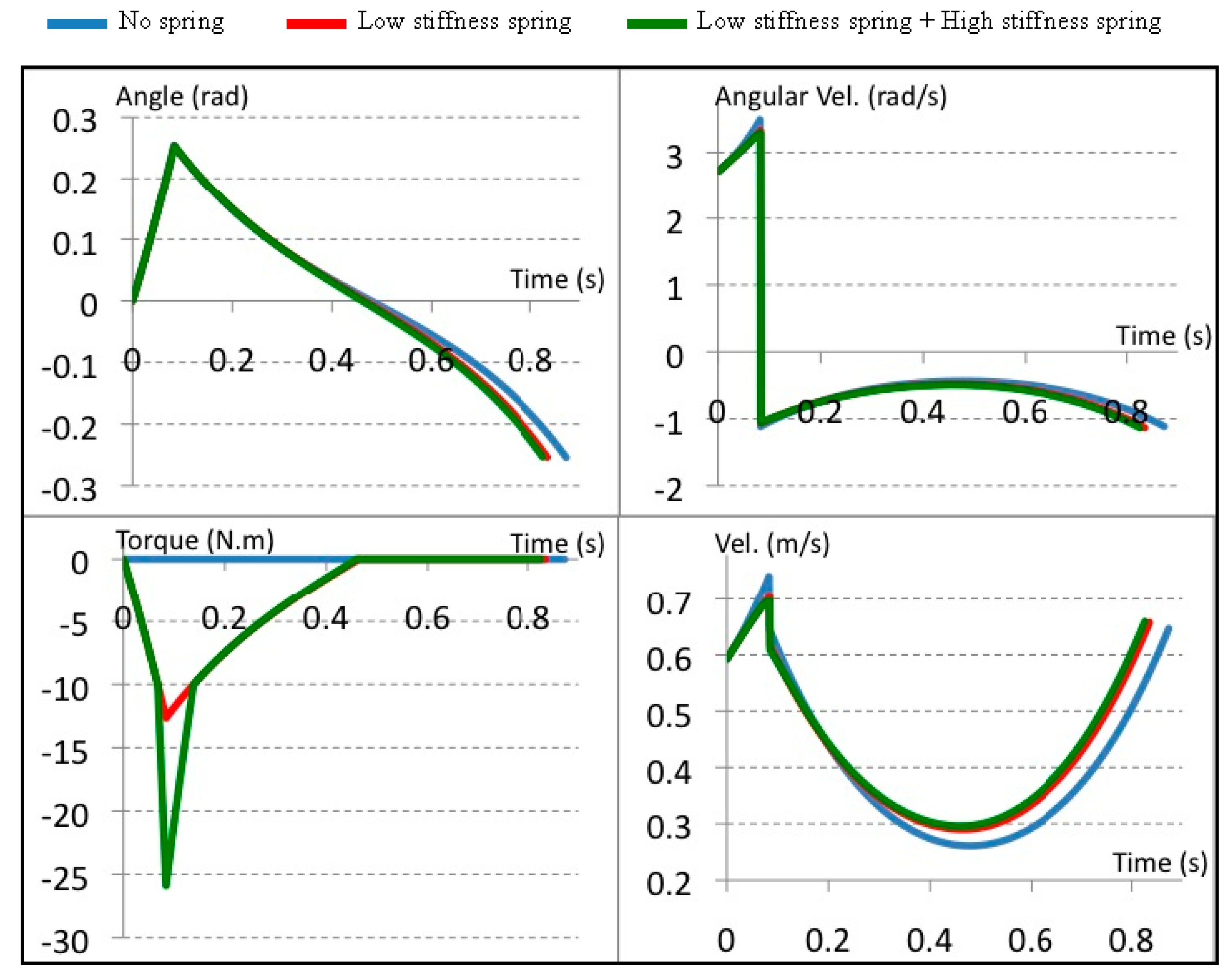
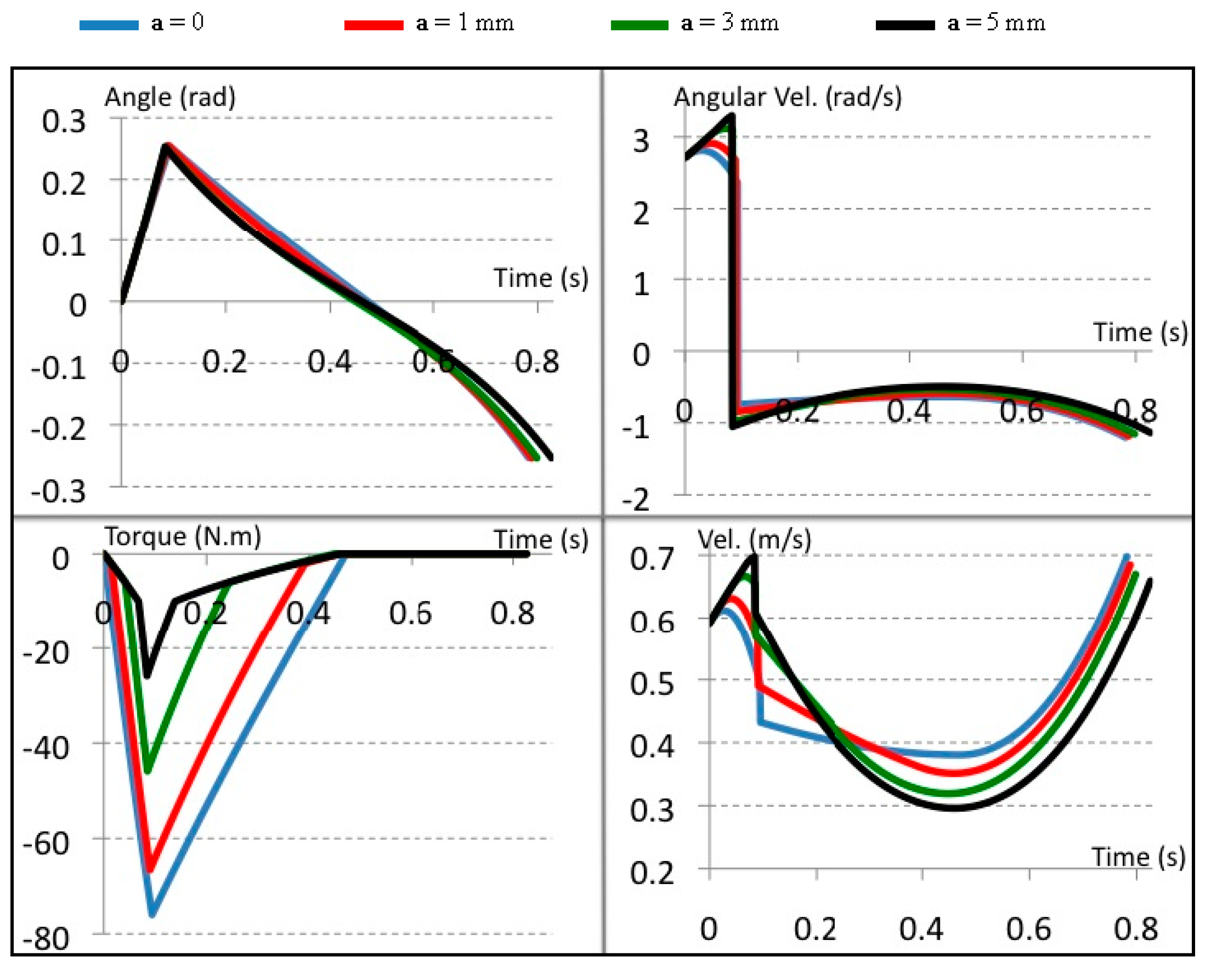
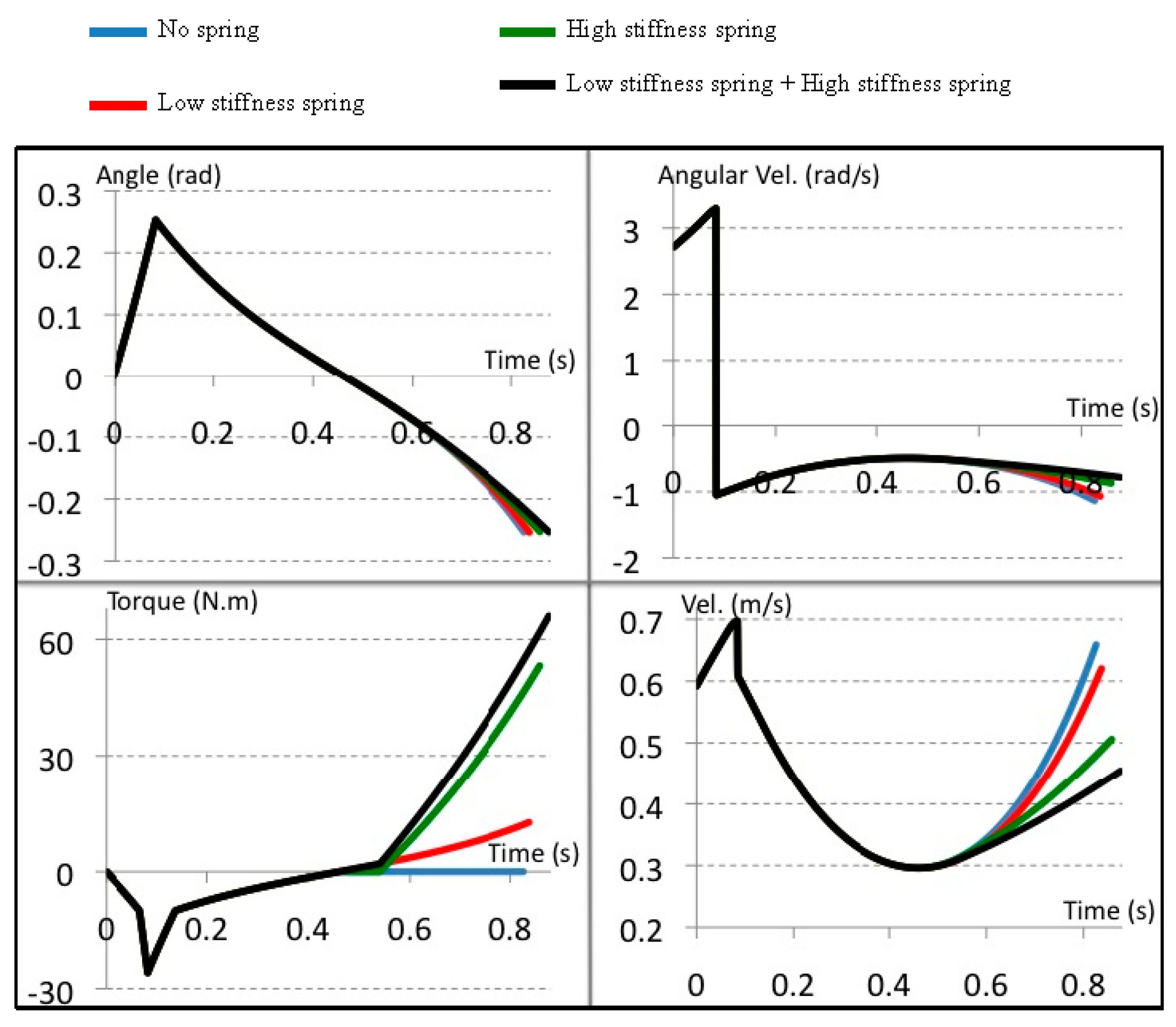
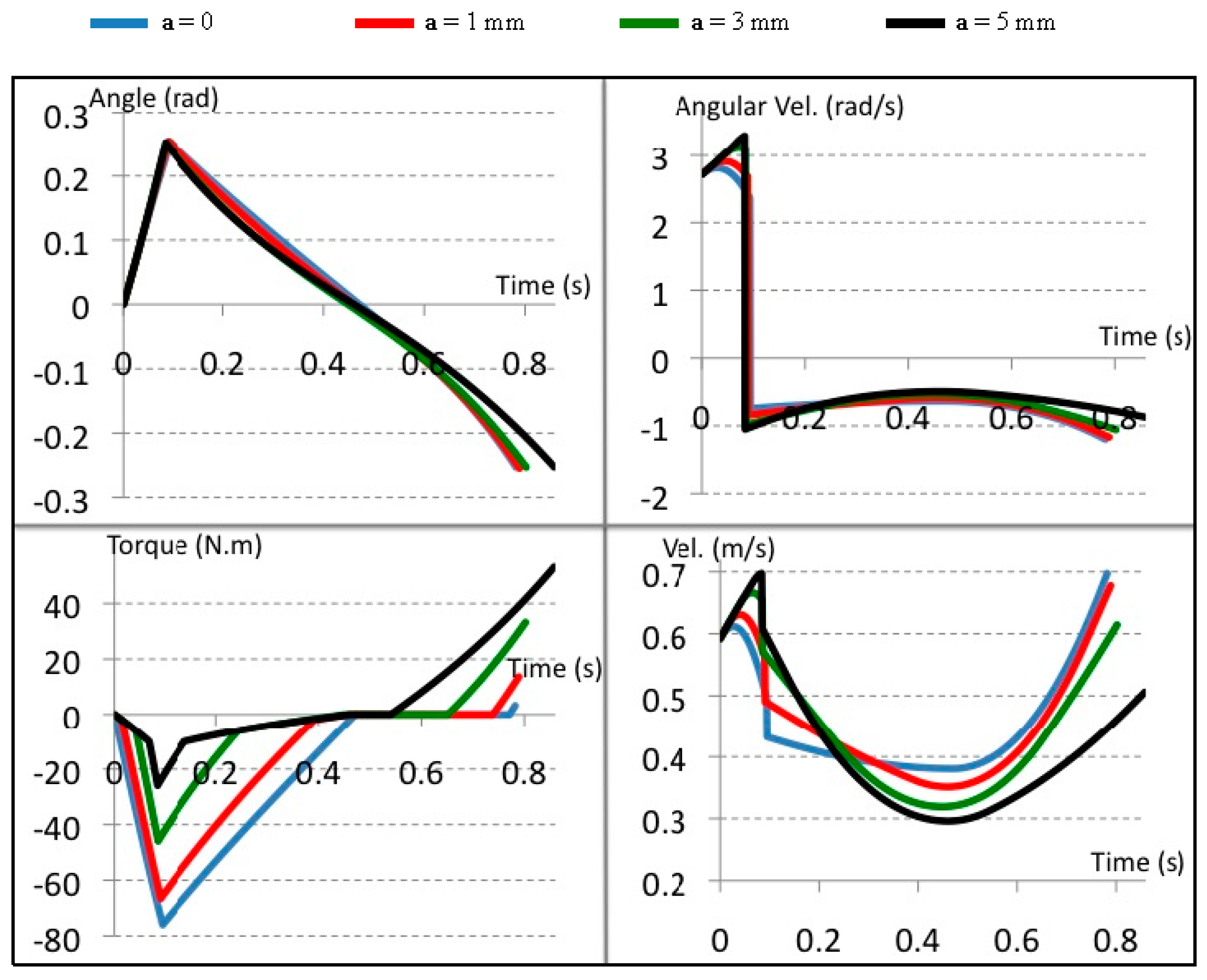
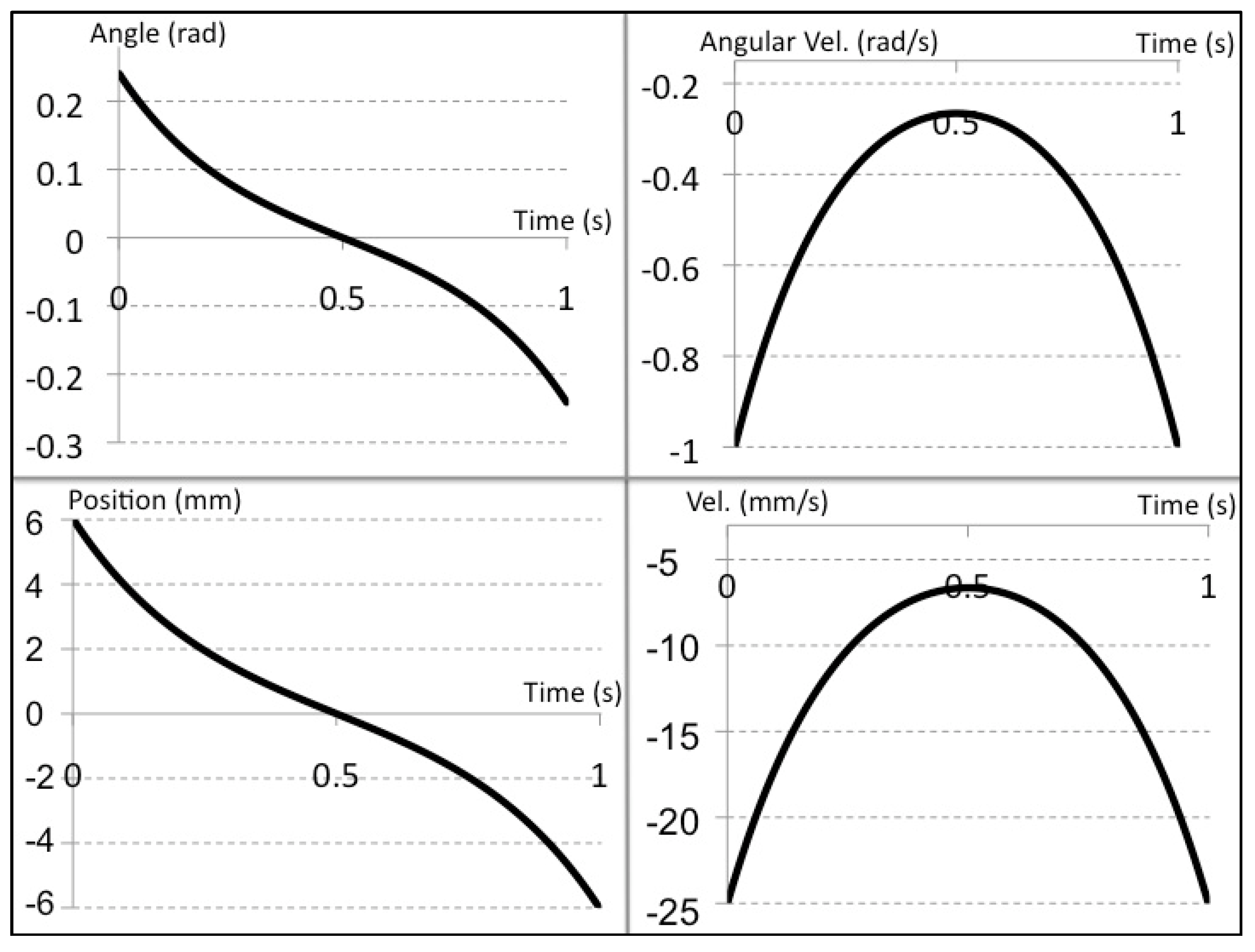
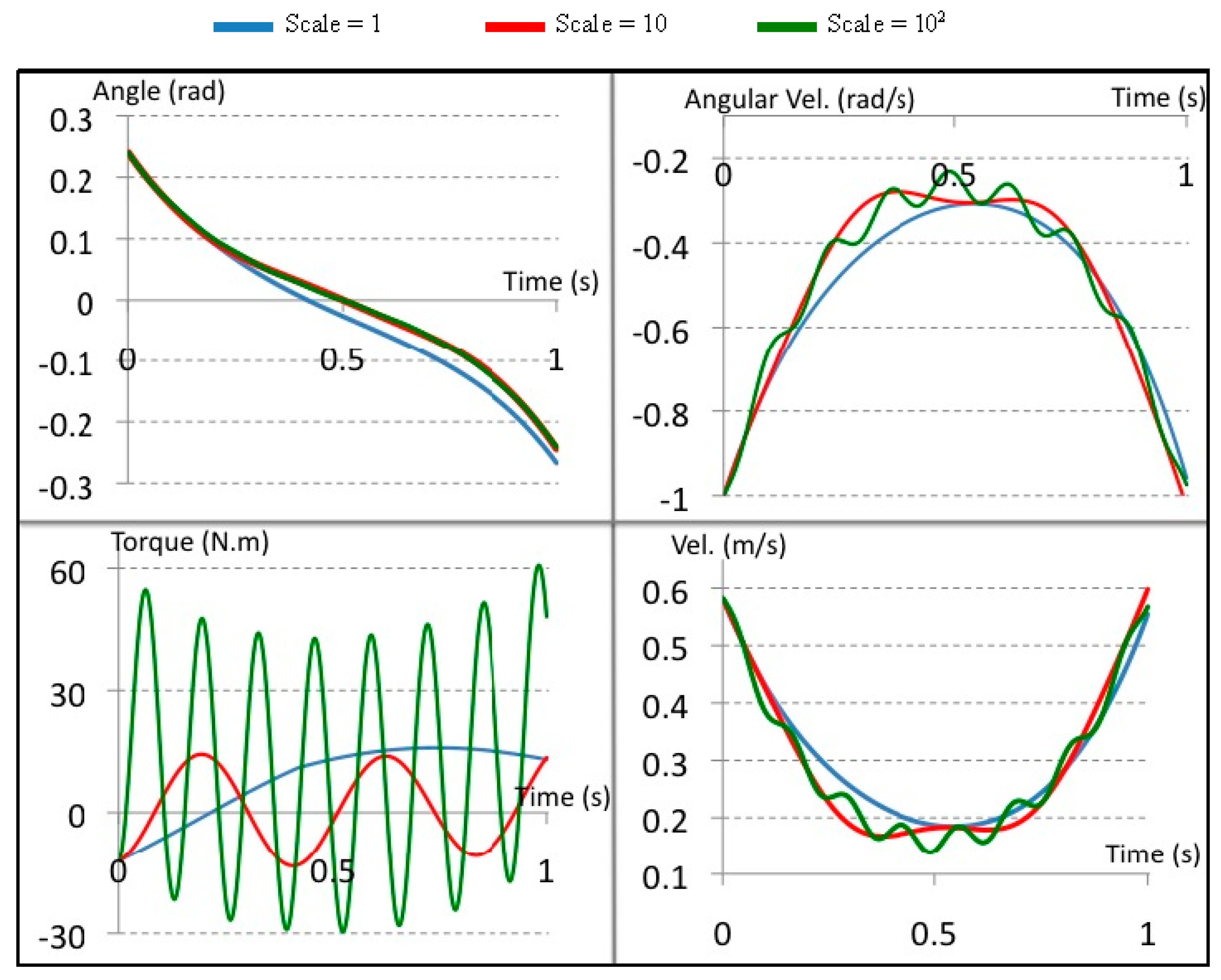
Figure 29.
Simulation data for Slider motion during one-step walking in active mode. The data is for 3 experimental tests with different high stiffness scales. Low stiffness spring constant = 80 N/mm. High stiffness spring constant = 400 N/mm. (a) ankle pitch joint angle; (b) ankle pitch joint angular velocity; (c) ankle pitch joint torque; (d) CoM forward velocity.
Figure 29.
Simulation data for Slider motion during one-step walking in active mode. The data is for 3 experimental tests with different high stiffness scales. Low stiffness spring constant = 80 N/mm. High stiffness spring constant = 400 N/mm. (a) ankle pitch joint angle; (b) ankle pitch joint angular velocity; (c) ankle pitch joint torque; (d) CoM forward velocity.
Generally, the current study will only provide us with the basic idea for this technique. The implementation of such a technique will require more advanced technology in terms of, say, actuators and materials, that is not currently available. Nevertheless, the current research work presented in this paper could be a helpful guideline for the development of an effective bipedal humanoid robot.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}