1. Introduction
The atmospheric duct is a refraction phenomenon that occurs in the atmosphere where there are larger negative refractive gradient values, causing electromagnetic waves to be bent out of the transmitting direction. The atmospheric duct is able to affect the performance of the electromagnetic communication system severely, for example as in a radar system designed and evaluated by the standard model of atmospheric refractivity. Therefore, making full use of the information carried by electromagnetic waves to retrieve the atmospheric duct has become a new subject in the field of inverse problems [
1,
2]. Krolik and Tabrikian [
3] first proposed a method of using radar clutter data to obtain the atmospheric refractivity profile. Since then, many scholars have enriched the inversion method using radar echo to invert the atmospheric duct, including the genetic algorithm [
4], the Bayesian-Markov chain Monte Carlo method (MCMC) [
5], and the Support Vector Machine (SVM) [
6],
etc. [
7,
8,
9]. However, these methods have many drawbacks, such as low detecting precision, high equipment costs, vulnerability to electromagnetic interference or electromagnetic exposure, and so on.
With the development of ground-based GPS (Global Positioning System), Lowry
et al. [
10] and Sheng
et al. [
11] put forward a new method whereby the ground-based GPS delay was used to retrieve the atmospheric refractivity profile. Even so, the inversion effect was not ideal because it only used delay information. Xue
et al. [
12] tried to improve the inversion accuracy by increasing the vertical resolution of the inversion model, but the difference between the retrieved results and the observation was still obvious at a low level. These retrieved results were calculated from the single observation. Wu
et al. [
13] tried using the phase delay and bending angle to retrieve the refractivity profile and obtained a relatively accurate result. However, this method did not highlight the superiority of joint inversion due to the strong correlation between the two observations.
Joint inversion is a method using multiple observations to estimate the synthesized parameters, and it plays an important role in the field of geophysical quantitative analysis, especially in geological exploration, oil and gas exploration,
etc. [
14,
15]. Alekseev
et al. [
16] described the solution to joint inversion problems and their general characteristics in detail. They concluded that joint inversion has more advantages than a single geophysical data inversion. Lin
et al. [
17] and Chen
et al. [
18] demonstrated that the joint inversion method is able to improve the inverting accuracy through comparing retrievals and observations.
There are two types of joint inversion thoughts, generally [
19]. The first kind is based on geophysical observation with the same physical characteristics, for example as in the joint inversion with phase delay and bending angle proposed by Wu
et al. [
13]. The two kinds of information have such a strong relationship that they can be regarded as the same data expressed in two different forms. The other joint inversion thought is based on independent geophysical observation which has different physical characteristics. This inversion thought usually brings good results and is a perfect choice in geophysical inversion. Nevertheless, this thought has not been documented in the field of atmospheric duct retrieval yet. Therefore, in this paper, we will propose a new inversion method to retrieve the atmospheric refractivity profile using independent geophysical observations based on the second inversion thought.
The organization of the remainder of this paper is detailed below.
Section 2 outlines the forward model and parameterization schemes. This section focuses on introducing the phase delay and propagation loss model in the forward process, and builds a four-parameter profile model. The selected algorithm is described in
Section 3. The analysis and results of the numerical experiments (including the parameter settings) are given in
Section 4. Meanwhile, we also present the performance of the novel method in real conditions. The conclusions and the direction of possible future research are presented in
Section 5.
3. Inversion Algorithm
The joint inversion with phase delay and propagation loss is a multiobjective optimization process. Therefore, it is necessary to find a multiobjective optimization algorithm to realize this new method. In this paper, the NSGA-II is chosen to achieve this goal. This optimization algorithm is an improved algorithm based on the NSGA (the Non-dominated Sorting Genetic Algorithm) proposed by Srinivas and Deb in 2000 [
22,
23]. The NSGA-II improves the operation speed and robustness of the algorithm, gradually becoming a benchmark of the other multiobjective optimization algorithm.
It is assumed the vector
x = (
c1,
c2,
h1,
h2)
T, and the cost functions are defined as:
The NSGA-II is used to globally search the best parameters fitting into Equation (10). For all test problems, the parameter settings of NSGA-II are as follows: the number of iterations is set at 200, the population is 200, the number of the objective function is 2, and the crossover and mutation parameters are set to 20. The variables are treated as real numbers, and we adopt the simulated binary crossover (SBX) and the real parameter operator in the experiment [
22].
4. Results
To verify the feasibility and anti-noise ability, two inverted numerical simulations and one real data inversion test are considered. The first simulated condition does not add any disturbance, and the second simulation adds 3%, 5%, 7%, and 10% Gaussian white noise, respectively. Based on the real situation, we designed a series of parameter settings in the simulation. The detailed test processes are as follows.
4.1. Ideal Condition
In order to calculate the fitness of cost functions, the boundary of inverting parameters is set as
Table 1 and the antenna is adjusted for 18 m. The elevation angle is 1°. In fact, appropriate boundary setting has a significant influence on the precision of the inversion results. To contrast the performance of joint inversion, this paper uses the traditional general GA (the Genetic Algorithm) [
24] to process the single objective optimization inversion. Parameter settings for the GA are as follows: the number of iterations is set at 200, and the population is 200, consistent with the multiobjective inversion setting. The single point crossover rate is set from 0.9 to 0.3 with linear decline, and single point mutation rate is set from 0.01 to 0.1 with linear growth. In order to compare fairly, the upper and lower bounds of each individual inversion parameter are the same as the joint inversion. In
Table 1, there are inversion results of synthesized parameters in the ideal condition, namely adding 0% Gaussian noise.
As seen in
Table 1, the synthetic parameters inverted by the NSGA-II are better than the compared algorithms in the ideal condition. The established parameters of propagation loss are partly superior to the phase delay in GA, especially the refractivity gradient
c1.
Table 1.
The value of inversion parameters under noiseless and adding noise condition.
Table 1.
The value of inversion parameters under noiseless and adding noise condition.
| Parameters | Inversion Slope c1 | Height h1 | Inversion Slope c2 | Height h2 |
|---|
| Units | N-units/m | m | N-units/m | m |
| Lower Bound | −0.1 | 50 | −0.4 | 250 |
| Upper Bound | 0 | 150 | 0 | 350 |
| True Value | −0.02 | 100 | −0.2 | 300 |
| NSGA-II | 0% | −0.0227 (13.5%) | 99.8246 (−1.75%) | −0.199 (−0.5%) | 298.7839 (−0.4%) |
| 3% | −0.0155 (−22.5%) | 95.9541 (−4.04%) | −0.1990 (−0.5%) | 306.0764 (2.03%) |
| 5% | −0.0121 (−39.5%) | 94.7610 (−5.239%) | −0.2008 (0.4%) | 306.0295 (2.01%) |
| 7% | −0.0254 (27%) | 98.9927 (−1.007%) | −0.2007 (0.35%) | 300.4304 (0.143%) |
| 10% | −0.0146 (−27%) | 89.1687 (−10.83%) | −0.1959 (−2.05%) | 302.2124 (0.74%) |
| GA-Delay | 0% | −0.0576 (188%) | 109.5935 (9.59%) | −0.1969 (−1.55%) | 281.8778 (−6.04%) |
| 3% | −0.0519 (159.50%) | 91.2888 (−8.71%) | −0.1723 (−13.85%) | 332.9521 (10.98%) |
| 5% | −0.0361 (80.50%) | 115.5426 (15.54%) | −0.1865 (−6.75%) | 305.7128 (1.90%) |
| 7% | −0.0985 (392.50%) | 140.5176 (40.52%) | −0.1665 (−16.75%) | 328.5602 (9.52%) |
| 10% | −0.0618 (209.00%) | 124.9692 (24.97%) | −0.1693 (−15.35%) | 273.2624 (−8.91%) |
| GA-Loss | 0% | −0.0208 (4%) | 96.0873 (−3.91%) | −0.1948 (−2.6%) | 309.6933 (3.23%) |
| 3% | −0.0181 (−9.50%) | 102.2168 (2.22%) | −0.2050 (2.50%) | 296.1529 (−1.28%) |
| 5% | −0.0198 (−1.00%) | 93.3431 (−6.66%) | −0.1897 (−5.15%) | 312.0424 (4.01%) |
| 7% | −0.01934 (−3.30%) | 97.9463 (−2.054%) | −0.1905 (−4.75%) | 307.5467 (2.52%) |
| 10% | −0.0293 (46.50%) | 113.9005 (13.90%) | −0.2106 (5.30%) | 262.6215 (−12.46%) |
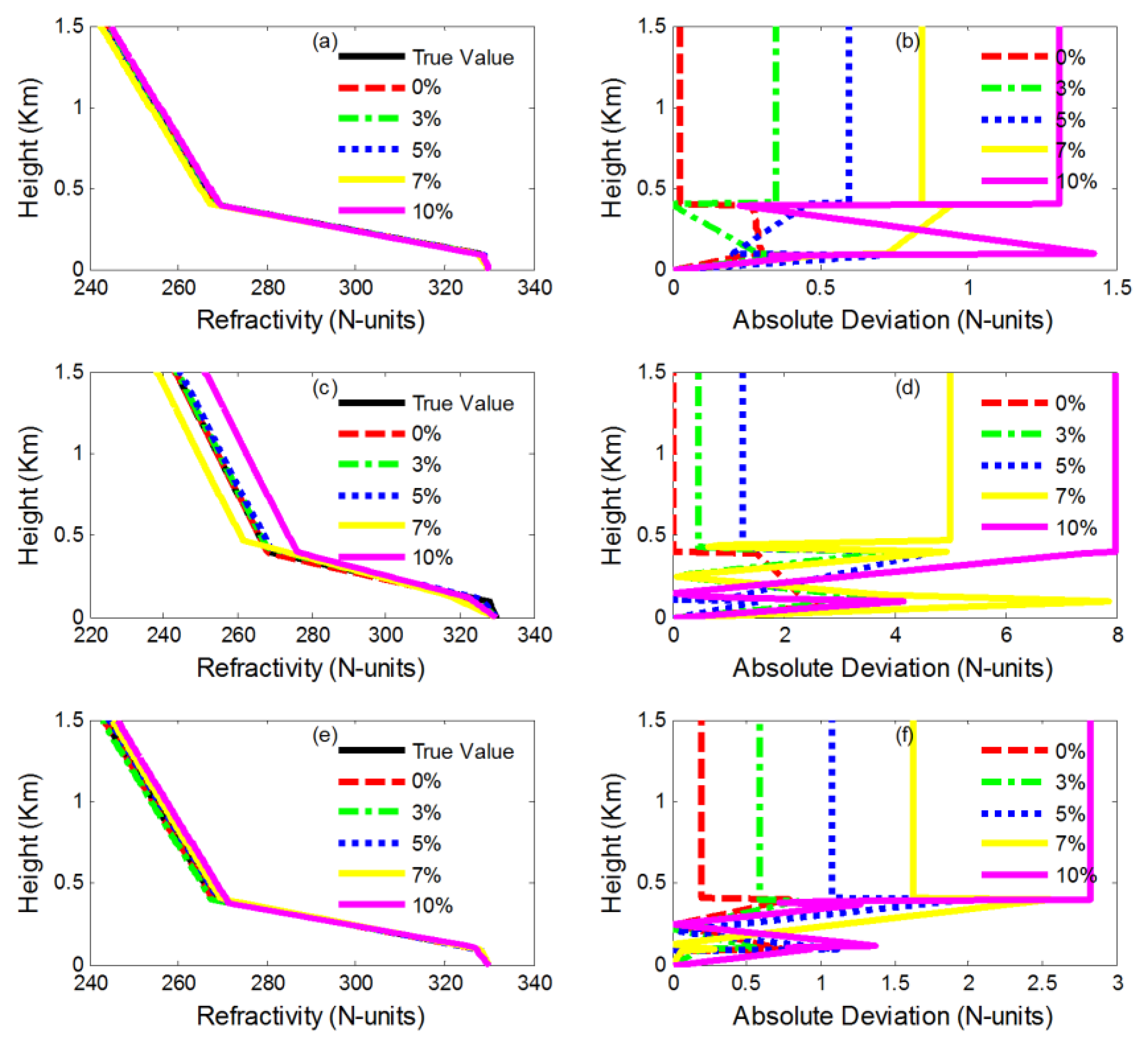
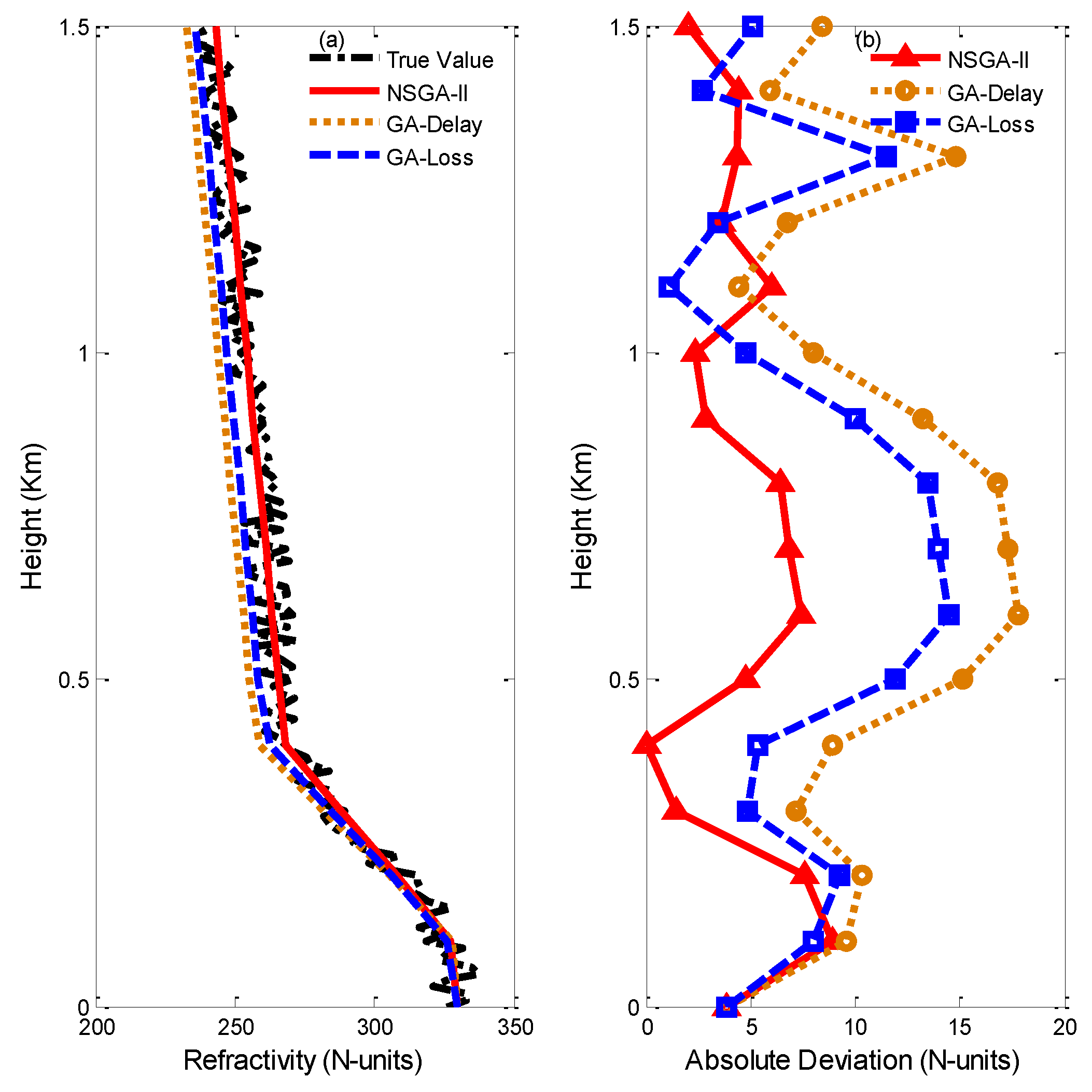
Figure 3 shows the refractivity profile and the corresponding absolute deviation. The absolute deviation profile reflects the difference between inversion and simulation. First of all, in the near-ground atmosphere, the deviation between joint inverting values and simulation is less by a margin of 1 N-units, and perfect inversion results have been achieved. Secondly, the individual inversion of propagation loss is relatively good, having a maximal absolute deviation of less than 2 N-units, whereas inversion results based on phase delay are the worst. In general, joint inversion contributes to superior performance which individual inversion does not present in the ideal case.
Figure 3.
The retrievals with different Gaussian noise: (a) and (b) are the refractivity profile and corresponding refractivity deviation by NSGA-II; (c) and (d) are the refractivity profile and corresponding refractivity deviation by GA-Delay; (e) and (f) are the refractivity profile and corresponding refractivity deviation by GA-Loss.
Figure 3.
The retrievals with different Gaussian noise: (a) and (b) are the refractivity profile and corresponding refractivity deviation by NSGA-II; (c) and (d) are the refractivity profile and corresponding refractivity deviation by GA-Delay; (e) and (f) are the refractivity profile and corresponding refractivity deviation by GA-Loss.
4.2. Adding Gaussian Noise
In the actual observation, ground-based GPS data usually contains a lot of white noise. This section considers the influence of measurement noise to the performance of joint inversion. Here, this paper successively adds 3%, 5%, 7% and 10% random Gaussian noise to simulate real data in the experiments.
Table 1 gives the inversion values of parameters in the various noise environments and the percentages of relative deviation are in the parentheses.
As
Table 1 shows, retrievals from phase delay by GA (GA-Delay) are greatly influenced by the noise. The inverting parameter is not as good as the estimation of joint inversion and propagation loss by GA (GA-Loss). In contrast, the established parameters of propagation loss are obviously better than other methods except for when adding the 10% noise condition, in which the NSGA-II shows the best performance. However, optimal parameter inversion does not mean the inverting profile converges to the real profile more closely. In fact, as seen from the refractivity profile of
Figure 3, the joint inversion possesses the best convergence in all the adding noise conditions, and the difference between the retrieval of the phase delay by GA and the true value is the largest. Thus, we can conclude joint inversion has strong noise immunity according to the performance of different inversion methods.
4.3. Real Data Testing
In order to further test the performance of joint inversion, real GPS data is used. True ground-based GPS observation data from the observation at Jiangxi Poyang Lake (115.27°E, 29.11°N), the corresponding sounding data from the meteorological rocket detection data (~4 m sampling at altitudes < 1.5 Km) and low resolution radiosondes (~50 m sampling at altitudes < 6 Km) were obtained, and the observation time was 17 April 2009. There is one observation in total. The excess phase is estimated using a modified version of Bernese v5.0 software in a precise point positioning mode [
11], and the propagation loss is calculated according the receiving power density of the antenna.
Table 2 depicts the results of inversion parameters by different inverting methods.
Table 2.
The value of inversion parameters by different inversion methods.
Table 2.
The value of inversion parameters by different inversion methods.
| Parameters | Inversion Slope c1 | Height h1 | Inversion Slope c2 | Height h2 |
|---|
| Units | N-units/m | m | N-units/m | m |
| NSGA-II | −0.0281 | 105.0418 | −0.2013 | 293.8846 |
| GA-Delay | −0.0212 | 102.3759 | −0.2313 | 304.9078 |
| GA-Loss | −0.0374 | 110.5404 | −0.2187 | 298.8363 |
Figure 4.
Inversion results of NSGA-II and GA. (a) The refractivity profile. (b) The corresponding refractivity deviation.
Figure 4.
Inversion results of NSGA-II and GA. (a) The refractivity profile. (b) The corresponding refractivity deviation.
It is shown in
Figure 4 that when real GPS data are used, because real data contain some observation deviations, the inversion effect is not as perfect as that of simulated data. Nevertheless, the absolute deviation is still kept within modest bounds. Since the model of four parameters and the observations have defects, there is a deviation between real sounding data and inversion, and the inverting profile still has a low ability to depict the real atmospheric refractivity environment. Therefore, the next focus of our study is improving the model and providing a better algorithm. Overall, based on the results of inversion, we can know that the joint inversion is relatively successful, and the refractivity structure and characteristics aremanifested well.
4.4. Feasibility
To examine the feasibility of joint inversion at a higher antenna altitude, the antenna altitude is adjusted to 400 m or 600 m. The elevation angle is set to 1°.
Table 3 gives the inversion results. As shown in
Table 3, some parameters inverted by NAGA-II are obviously worse than those inverted by GA, while the others are inverted perfectly by NSGA-II. In other words, it is difficult to determine which method is superior if we only estimate from the inverting parameters. Due to this reason,
Figure 5 gives the absolute deviation profile.
Table 3.
The value of inversion parameters.
Table 3.
The value of inversion parameters.
| Parameters | Inversion Slope c1 | Height h1 | Inversion Slope c2 | Height h2 |
|---|
| Units | N-units/m | m | N-units/m | m |
| True Value | −0.05 | 1100 | −0.3 | 300 |
| 400 m | NSGA-II | −0.0501 (0.20%) | 1058.2 (−3.80%) | −0.35 (16.67%) | 312.6988 (4.23%) |
| GA-Delay | −0.05 (0.0%) | 1053.1 (−4.26%) | −0.3029 (0.97%) | 309.7630 (3.25%) |
| GA-Loss | −0.0503 (0.60%) | 1148.4 (4.40%) | −0.2723 (−9.23%) | 304.0592 (1.35%) |
| 600 m | NSGA-II | −0.05 (0.0%) | 1028.82 (−6.40%) | -0.41 (36.70%) | 289.8588 (−3.38%) |
| GA-Delay | −0.044 (-12.00%) | 1012.1 (−7.99%) | -0.4659 (−55.30%) | 293.7786 (−2.07%) |
| GA-Loss | −0.05 (0.0%) | 1029.8588 (−6.38%) | -0.2508 (−16.40%) | 311.7714 (3.92%) |
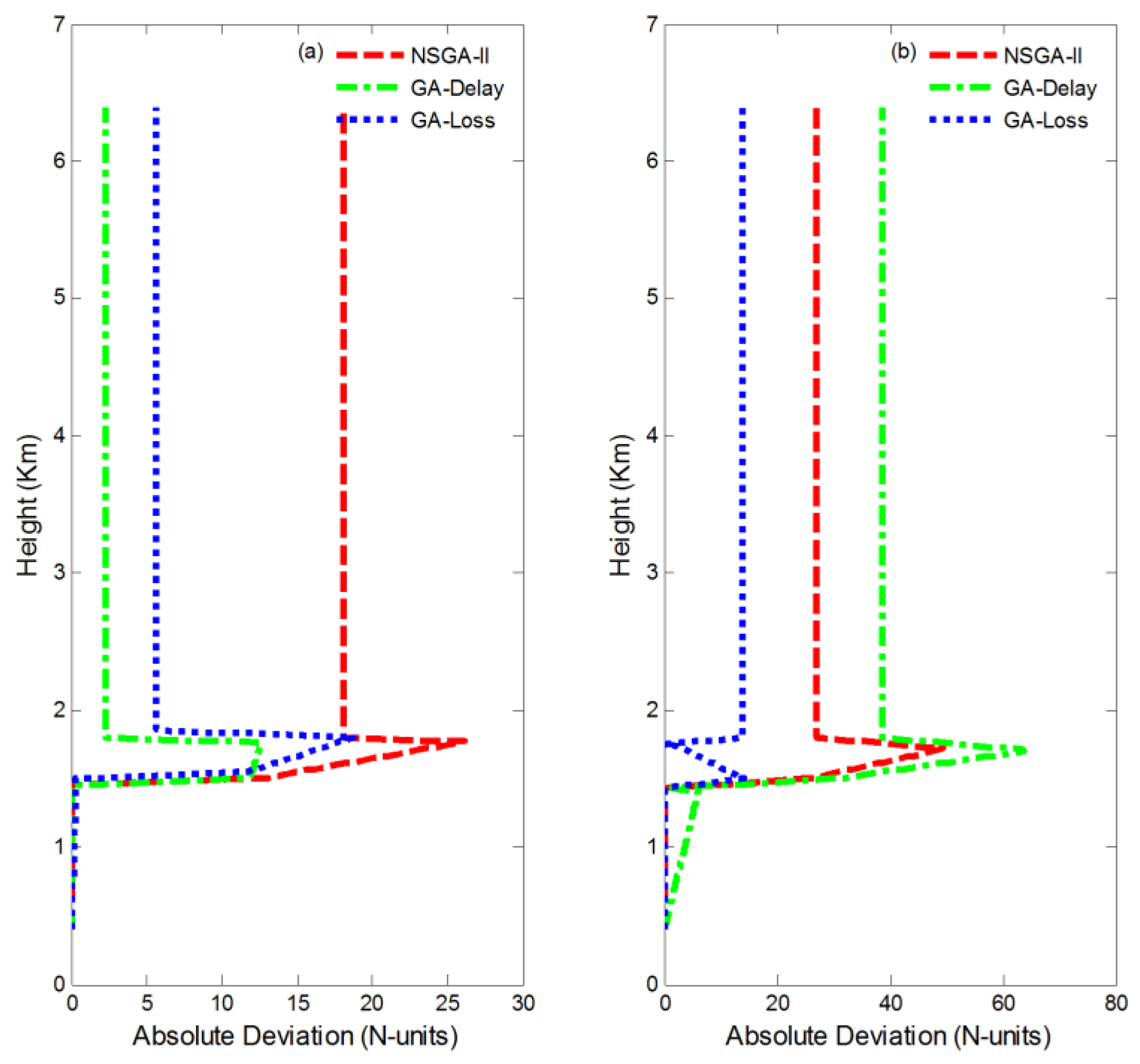
Figure 5.
Refractivity absolute deviation under different antenna height: (a) 400 m antenna height. (b) 600 m antenna height.
Figure 5.
Refractivity absolute deviation under different antenna height: (a) 400 m antenna height. (b) 600 m antenna height.
As
Figure 5 shows, obviously, the joint inversion results are not ideal and the difference between the two profiles is larger. In contrast, the results of individual inversion based on a single observation are relatively good and properly depict the real structure of the atmospheric refractivity. This phenomenon further illustrates that joint inversion has some limitations in the higher antenna condition.
In fact, combining
Figure 5 with
Figure 3, it is also easily found that the result of individual inversion is worse than that of low height. That means the antenna altitude has a profound effect on the inversion indeed.
5. Conclusions
In this paper, an improved retrieval method is proposed combining GPS scattering signals and GPS direct signals to estimate the synthesized parameters of atmospheric refractivity. The inverting refractivity profile can be more perfectly estimated by joint inversion than by using a single observation to retrieve it. In the estimation, traditional GA is chosen to test the performance of joint inversion in the ideal condition, the Gaussian noise case, and the real situation, respectively. Under different noise conditions, the estimated results demonstrate that joint inversion has a higher accuracy and the inverting profile converges to the simulated value more closely than the compared methods. Although a large deviation exists, the measured data testing shows joint inversion is qualified for depicting a real refractivity profile. Nevertheless, joint inversion still has some limitations in the case of a higher antenna which may be attributed to the suitable altitude of the propagation loss model. Finally, this paper does not consider the effect of elevation angle on joint inversion. This problem will be one direction of the future research work.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}