Short-Range Numerical Weather Prediction of Extreme Precipitation Events Using Enhanced Surface Data Assimilation

Abstract
:1. Background
2. The Forecasting System and Surface Initial State
2.1. NWP System
2.2. Default Surface Data Assimilation of Temperature and Moisture
3. Modelling System Setup and Description of Cases
4. An Enhanced Assimilation of Surface Temperature and Soil Moisture
4.1. Overview
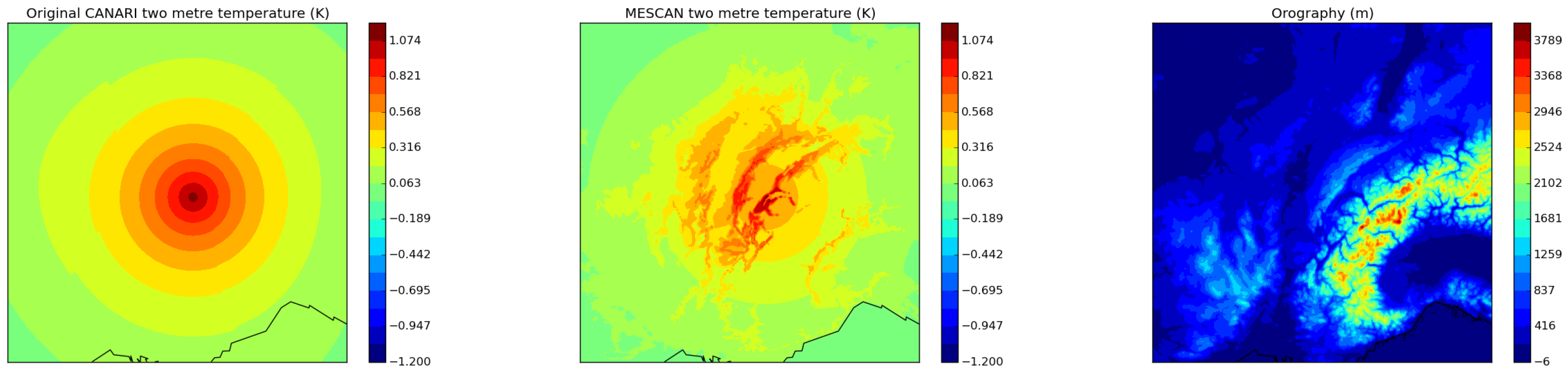
4.2. Screen-Level Structure Functions
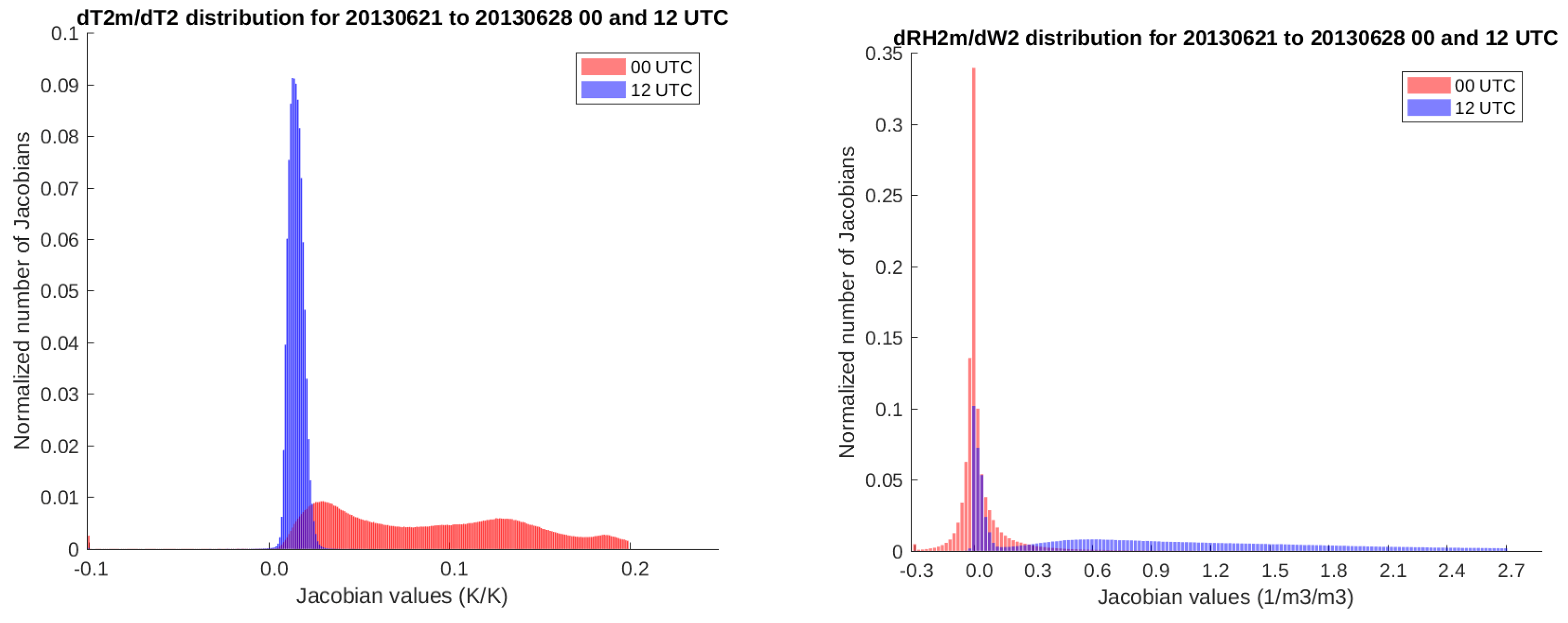
4.3. Flow-Dependent Vertical Spreading of Information
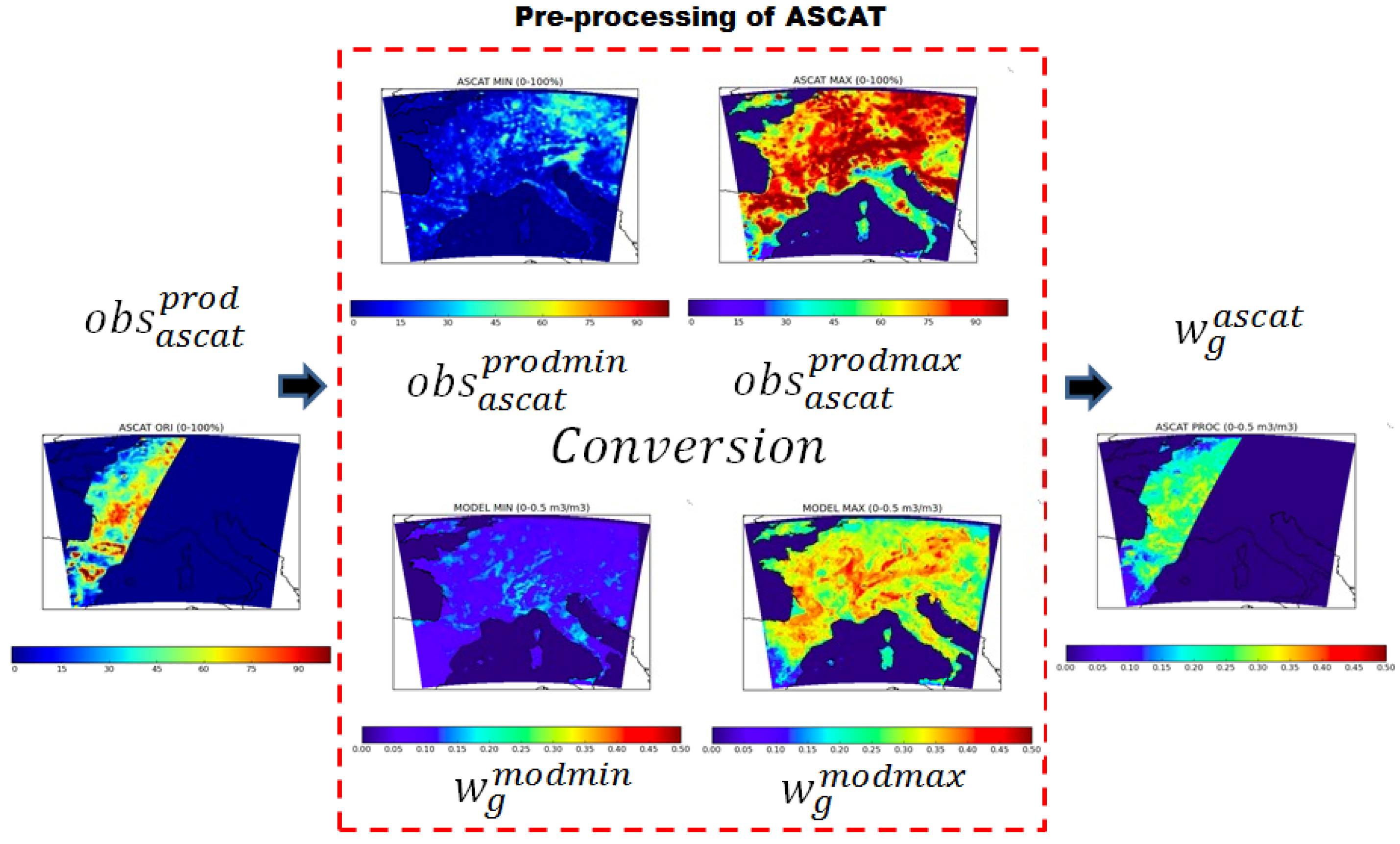
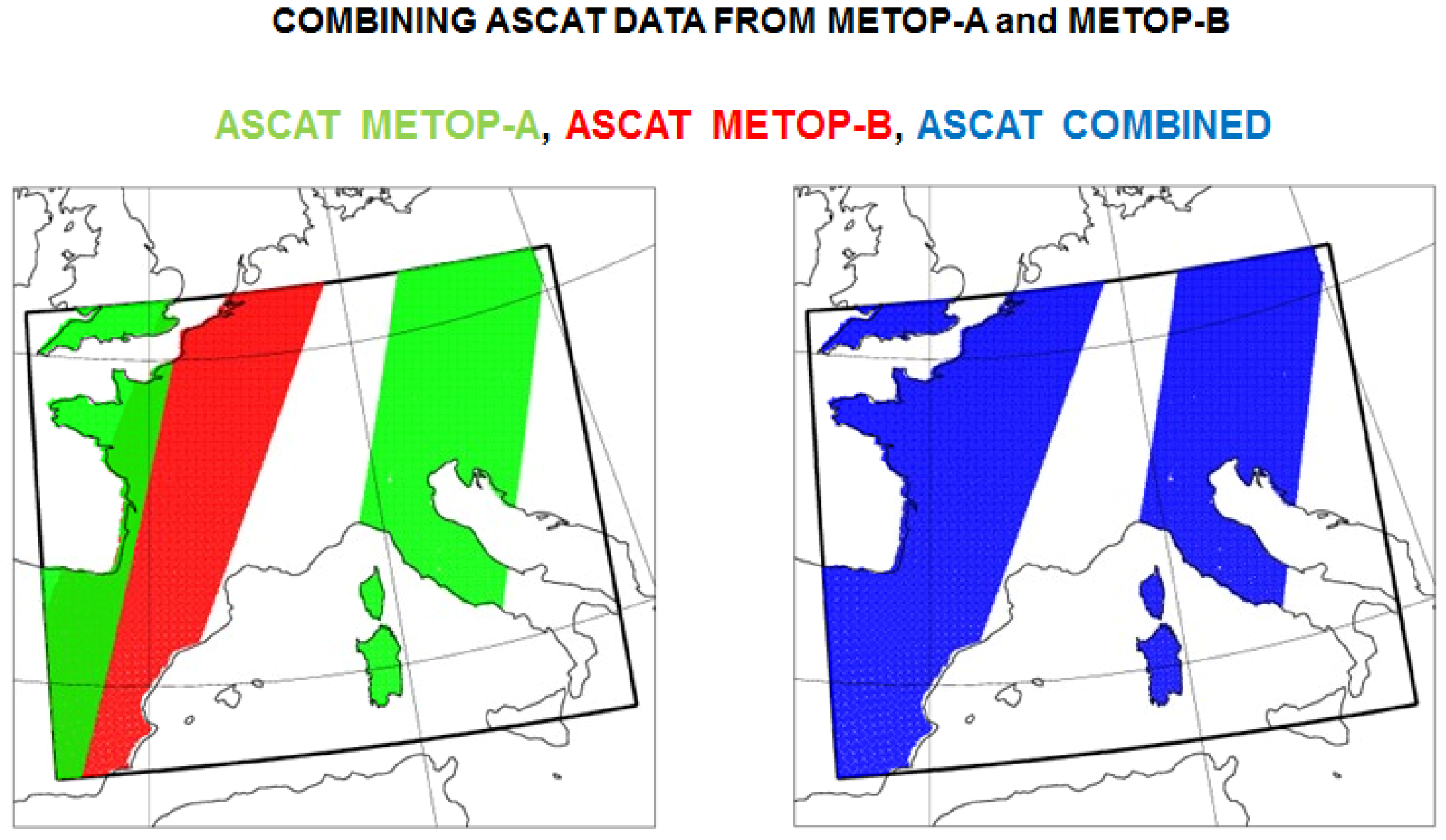
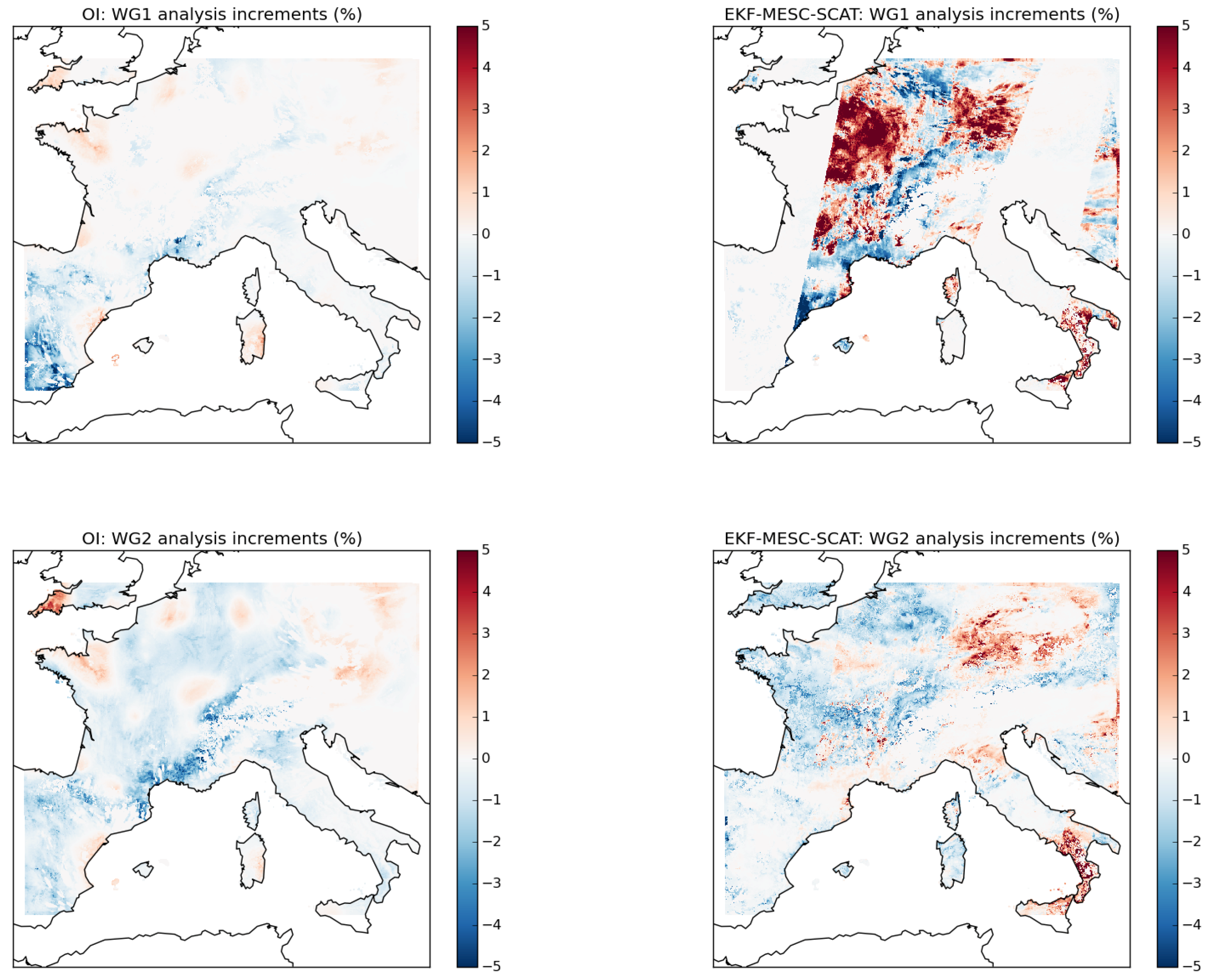
4.4. Use of Remote Sensing Data
5. Organisation of Experiments
6. Results
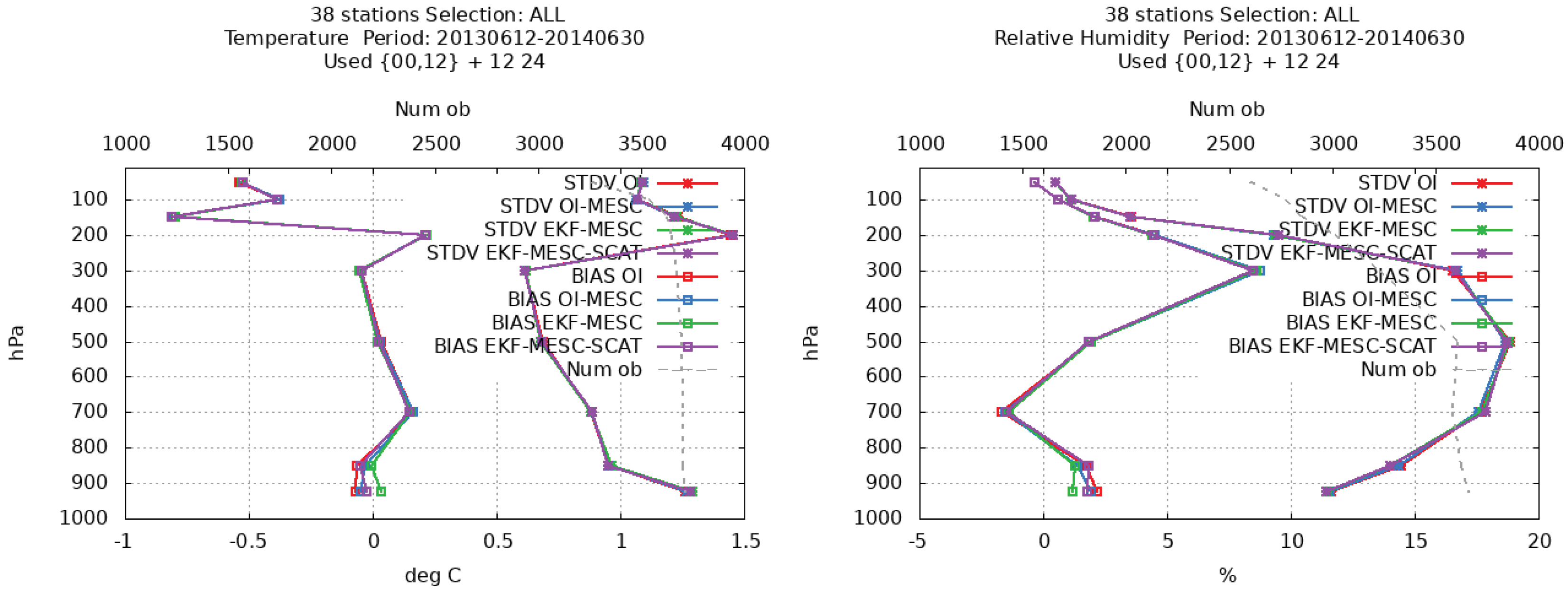
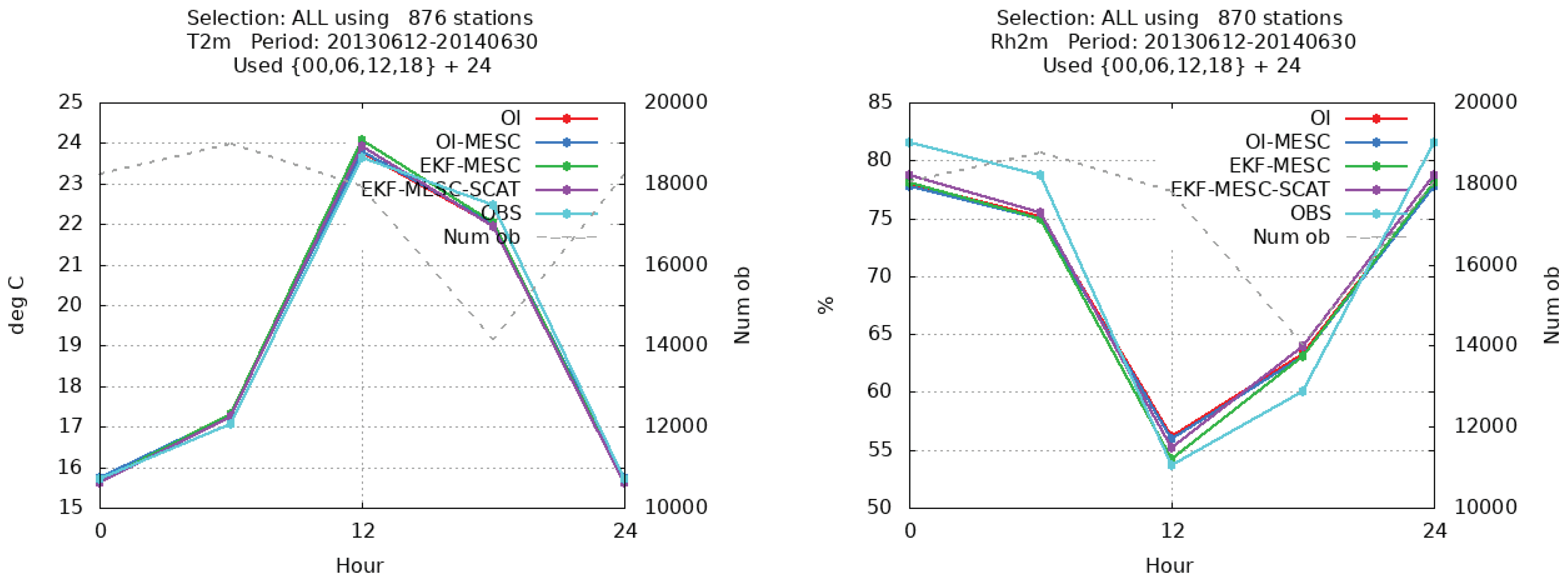
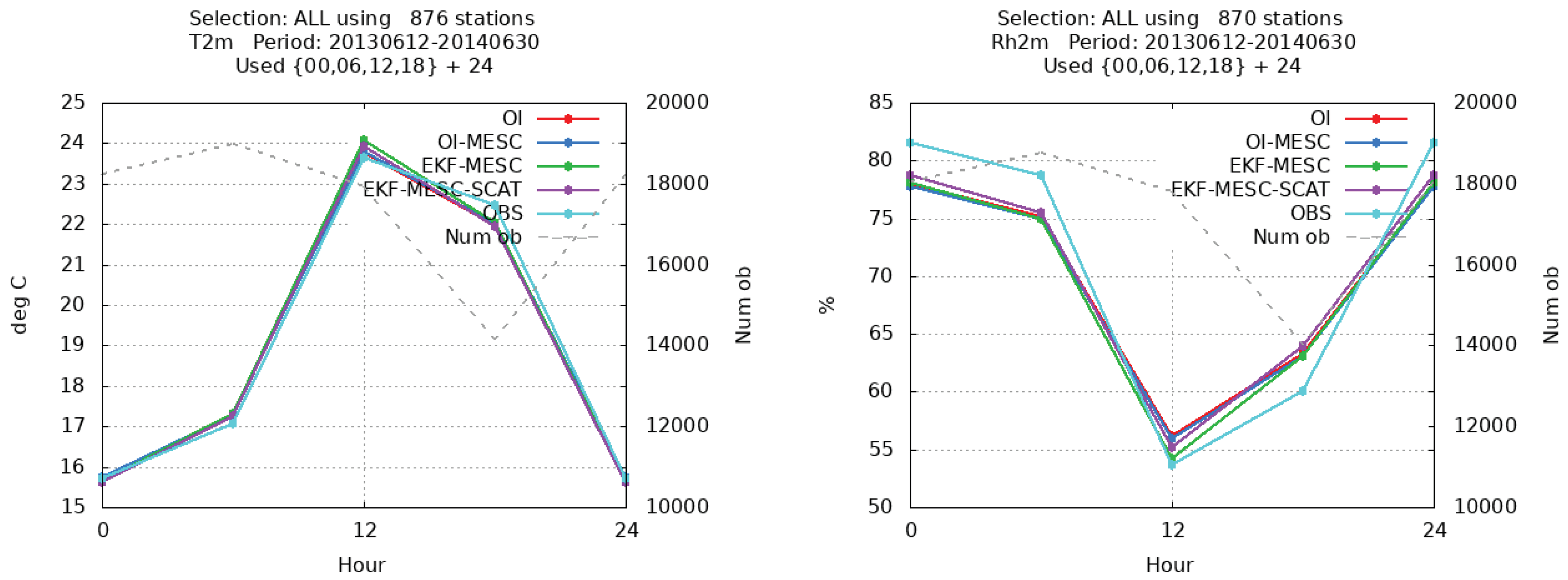
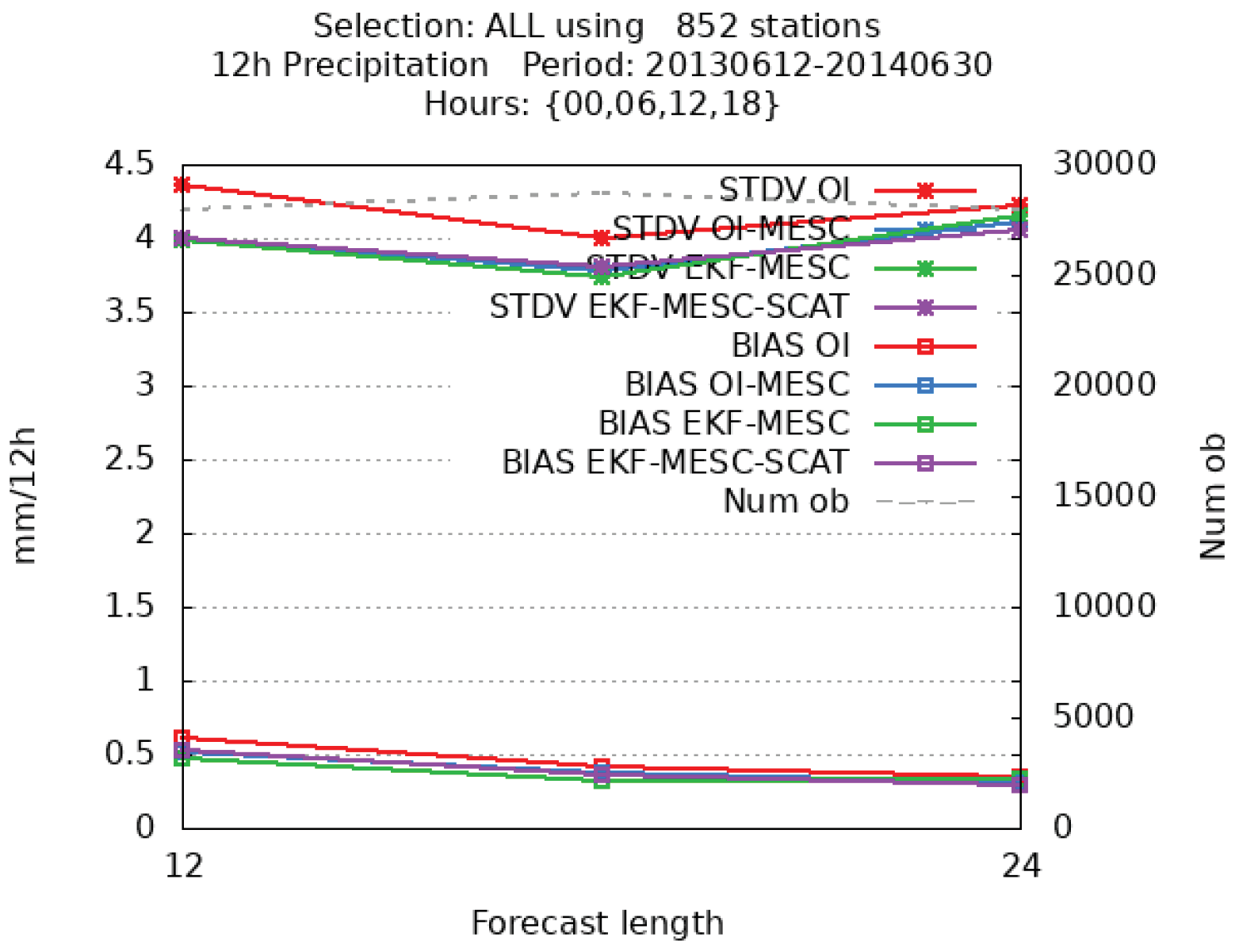
6.1. Objective Verification
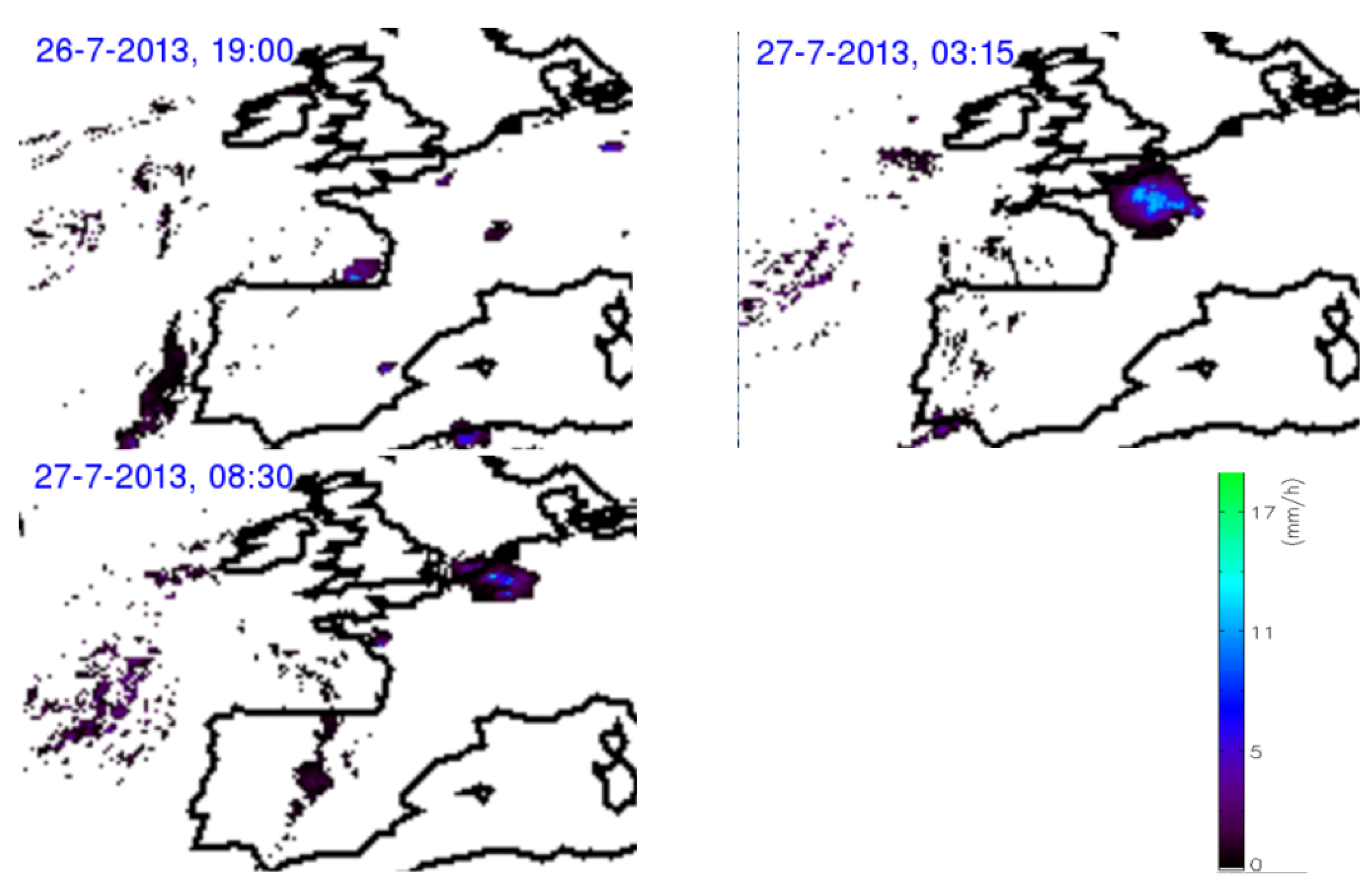
6.2. Subjective Verification of a Case Study
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lorenz, E. A study of the predictability of a 28-variable atmospheric model. Tellus 1965, 17, 321–333. [Google Scholar] [CrossRef] [Green Version]
- Lindskog, M.; Landelius, T. An Improved System for Short-Term Prediction of Extreme Precipitation Events. IMPREX Deliverable Report 3.2. 2018. Available online: https://www.imprex.eu/system/files/generated/files/resource/deliverable-3-2-imprex-v2-0.pdf (accessed on 25 September 2019).
- Beljaars, A.; Viterbo, P.; Miller, M.; Betts, A. The anomalous rainfall over the United States during July 1993. Sensitivity to land surface parameterization and soil anomalies. Mon. Weather Rev. 1996, 124, 362–383. [Google Scholar] [CrossRef]
- Douville, H.; Viterbo, P.; Mahfouf, J.-F.; Beljaars, A. Evaluation of the optimum interpolation and nudging technique for soil moisture analysis using FIFE data. Mon. Weather Rev. 2000, 128, 1733–1756. [Google Scholar] [CrossRef]
- Drusch, M.; Viterbo, P. Assimilation of screen-level variables in ECMWF’s Integrated Forecast System: A study on the impact on the forecast quality and analyzed soil moisture. Mon. Weather Rev. 2007, 135, 300–314. [Google Scholar] [CrossRef]
- Mahfouf, J.-F.; Viterbo, P.; Douville, H.; Beljaars, A.; Saarinen, S. A Revised land-surface analysis scheme in the Integrated Forecasting System. ECMWF Newsl. 2000, 88, 8–13. [Google Scholar]
- Van den Hurk, B.; Ettema, J.; Viterbo, P. Analysis of Soil Moisture Changes in Europe during a Single Growing Season in a New ECMWF Soil Moisture Assimilation System. J. Hydrometeorol. 2008, 9, 116–131. [Google Scholar] [CrossRef]
- Benjamin, S.G.; Weygandt, S.S.; Brown, J.M.; Hu, M.; Alexander, C.R.; Smirnova, T.G.; Olson, J.B.; James, E.P.; Dowell, D.C.; Grell, G.A.; et al. A North American Hourly Assimilation and Model Forecast Cycle: The Rapid Refresh. Mon. Weather Rev. 2016, 144, 1669–1694. [Google Scholar] [CrossRef]
- Koster, R.D.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Cox, P.; Gordon, C.; Kanae, S.; Kowalczyk, E.; Lawrence, D.; Liu, P.; et al. Regions of Strong Coupling Between Soil Moisture and Precipitation. Sciences 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [Green Version]
- Koster, R.D.; Mahanama, P.P.; Yamada, T.J.; Balsamo, G.; Berg, A.A.; Boisserie, M.; Dirmeyer, P.A.; Doblas-Reyes, F.J.; Drewitt, G.; Gordon, C.T.; et al. The second phase of the global land-atmosphere coupling experiment: Soil moisture contributions to sub-seasonal forecast skill. J. Hydrometeorol. 2011, 12, 805–822. [Google Scholar] [CrossRef]
- Weisheimer, A.; Doblas-Reyes, F.J.; Jung, T.; Palmer, T.N. On the predictability of the extreme summer 2003 over Europe. Geophys. Res. Lett. 2011, 38, L05704. [Google Scholar] [CrossRef]
- Bengtsson, L.; Andrae, U.; Aspelien, T.; Batrak, Y.; Calvo, J.; de Rooy, W.; Gleeson, E.; Hansen-Sass, B.; Homleid, M.; Hortal, M.; et al. The HARMONIE-AROME model configuration in the ALADIN-HIRLAM NWP system. Mon. Weather Rev. 2017, 145, 1919–1935. [Google Scholar] [CrossRef]
- Mahfouf, J.-F.; Bergaoui, K.; Draper, C.; Bouyssel, F.; Taillefer, F.; Taseva, L. A comparison of two off-line soil analysis schemes for assimilation of screen level observation. J. Geophys. Res. 2009, 114. [Google Scholar] [CrossRef]
- Muñoz-Sabater, J.; de Rosnay, P.; Albergel, C.; Isaksen, L. Sensitivity of soil moisture analyses to contrasting background and observation error scenarios. Water 2018, 10, 890. [Google Scholar] [CrossRef]
- Reichle, R.H.; Walker, J.P.; Koster, R.D.; Houser, P.R. Extended versus Ensemble Kalman Filtering for Land Data Assimilation. J. Hydrolmeorol. 2002, 3, 728–740. [Google Scholar] [CrossRef]
- Schneider, S.; Wang, Y.; Wagner, W.; Mahfouf, J. Impact of ASCAT Soil Moisture Assimilation on Regional Precipitation Forecasts: A Case Study for Austria. Mon. Weather Rev. 2014, 142, 1525–1541. [Google Scholar] [CrossRef]
- Seity, Y.; Brousseau, P.; Malardel, S.; Hello, G.; Benard, P.; Bouttier, F.; Lac, C.; Masson, V. The AROME-France Convective-Scale Operational Model. Mon. Weather Rev. 2011, 139, 976–991. [Google Scholar] [CrossRef] [Green Version]
- Cuxart, J.; Bougeault, P.; Redelsperger, J.-L. A turbulent scheme allowing for mesoscale and large-eddy simulations. Q. J. R. Meteorol. Soc. 2000, 126, 1–30. [Google Scholar] [CrossRef]
- Fouquart, Y.; Bonnel, B. Computation of solar heating of the Earth’s atmosphere: A new parameterization. Beitr. Phys. Atmos. 1980, 53, 35–62. [Google Scholar]
- Mlawer, E.J.; Taubman, S.J.; Brown, P.D.; Iacono, M.J.; Clough, S.A. Radiative transfer for inhomogeneous atmospheres: RRTM, a validated correlated-k model for the longwave. J. Geophys. Res. 1997, 102, 16663–16682. [Google Scholar] [CrossRef] [Green Version]
- Masson, V.; Le Moigne, P.; Martin, E.; Faroux, S.; Alias, A.; Alkama, R.; Belamari, S.; Barbu, A.; Boone, A.; Bouyssel, F.; et al. The SURFEX v7.2 land and ocean surface platform for coupled or offline simulations of Earth surface variables and fluxes. Geosci. Model Dev. 2013, 6, 929–960. [Google Scholar] [CrossRef]
- Noilhan, J.; Planton, S. A Simple Parameterization of Land Surface Processes for Meteo- rological Models. Mon. Weather Rev. 1989, 117, 536–549. [Google Scholar] [CrossRef]
- Noilhan, J.; Mahfouf, J.-F. The ISBA land surface parameter- ization scheme. Glob. Planet. Chang. 1996, 13, 145–159. [Google Scholar] [CrossRef]
- Deardorff, J.W. A parameterization of ground surface moisture content for use in atmospheric prediction models. J. Appl. Meteorol. 1977, 16, 1182–1185. [Google Scholar] [CrossRef]
- Boone, A.; Calvet, J.-C.; Noilhan, J. Inclusion of a third soil layer in a land-surface scheme using the force-restore method. J. Appl. Meteorol. 1999, 38, 1611–1630. [Google Scholar] [CrossRef]
- Müller, M.; Homleid, M.; Ivarsson, K.-I.; Koltzow, M.; Lindskog, M.; Midtbo, K.-H.; Andrae, U.; Aspelien, T.; Berggren, L.; Bjorge, D.; et al. AROME-MetCoOp: ANordic Convective-Scale Operational Weather Prediction Model. Weather Forecast. 2017, 32, 609–627. [Google Scholar] [CrossRef]
- Fischer, C.; Montmerle, T.; Berre, L.; Auger, L.; Stefanescu, S. An overview of the variational assimilation in the ALADIN/France numerical weather-prediction system. Q. J. R. Meteorol. Soc. 2005, 131, 3477–3492. [Google Scholar] [CrossRef]
- Taillefer, F. CANARI—Technical Documentation—Based on ARPEGE Cycle CY25T1 (AL25T1 for ALADIN). 2002. Available online: http://www.umr-cnrm.fr/gmapdoc/ (accessed on 25 September 2019).
- Giard, D.; Bazile, E. Implementation of a new assimilation scheme for soil and surface variables in a global NWP model. Mon. Weather Rev. 2000, 128, 997–1015. [Google Scholar] [CrossRef]
- Coiffier, J.; Ernie, Y.; Geleyn, J.-F.; Clochard, J.; Hoffman, J.; Dupont, F. The Operational Hemispheric Model at the French Meteorological Service. In Short and Medium Range Weather Prediction: Collection of Papers Presented at the WMO/IUGG NWP Symposium, Tokyo, 4–6 August 1986; Universal Academy Press: Tokyo, Japan, 1987; pp. 337–345. [Google Scholar]
- De Rosnay, P.; Drusch, M.; Vasiljevic, D.; Balsamo, G.; Albergel, C.; Isaksen, L. A simplified Extended Kalman Filter for the global operational soil moisture analysis at ECMWF. Q. J. R. Meteorol. Soc. 2013, 139, 1199–1213. [Google Scholar] [CrossRef]
- Häggmark, L.; Ivarsson, K.-I.; Gollvik, S.; Olofsson, P.-O. Mesan, an operational mesoscale analysis system. Tellus A Dyn. Meteorol. Oceanogr. 2000, 52, 2–20. [Google Scholar] [CrossRef] [Green Version]
- Soci, C.; Bazile, E. New MESAN-SAFRAN Downscaling System. EURO4M Deliverable D2.5. 2013. Available online: http://www.euro4m.eu/downloads/D2.5_New_MESAN-SAFRAN_downscaling_system.pdf (accessed on 11 September 2019).
- Soci, C.; Bazile, E.; Besson, F.; Landelius, T.; Mahfouf, J.-F.; Martin, E.; Durand, Y. Report Describing the New System in D2.5. EURO4M Deliverable D2.6. 2013. Available online: http://www.euro4m.eu/downloads/D2.6_Report_describing_the_new_system_in_D2.5.pdf (accessed on 11 September 2019).
- Draper, C.S.; Mahfouf, J.-F.; Walker, J.P. An EKF assimilation of AMSR-E soil moisture into the ISBA land surface scheme. J. Geophys. Res. 2009, 114, D05108. [Google Scholar] [CrossRef]
- Wagner, W.; Lemoine, G.; Rott, H. A method for estimating soil moisture from ERS scatterometer and soil data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Reichle, R.; Koster, R.; Dong, J.; Berg, A. Global soil moisture from satellite observations, land surface models, and ground data: Implications for data assimilation. J. Hydrometeorol. 2004, 5, 430–442. [Google Scholar] [CrossRef]
- Dharssi, I.; Bovis, K.J.; Macpherson, B.; Jones, C. Operational assimilation of ASCAT surface soil wetness at the Met Office. Hydrol. Earth Syst. Sci. 2011, 15, 2729–2746. [Google Scholar] [CrossRef] [Green Version]
- Mahfouf, J.-F. Assimilation of satellite-derived soil moisture from ASCAT in a limited-area NWP model. Q. J. R. Meteorol. Soc. 2010, 136, 784–798. [Google Scholar] [CrossRef]
- Lindskog, M.; Ridal, M.; Thorsteinsson, S.; Ning, T. Data assimilation of GNSS zenith total delays from a Nordic processing centre. Atmos. Chem. Phys. 2017, 17, 13983–13998. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Charachteristics |
|---|---|
| 20130612–20130619 | Heavy precipitation in the Pyrenees. |
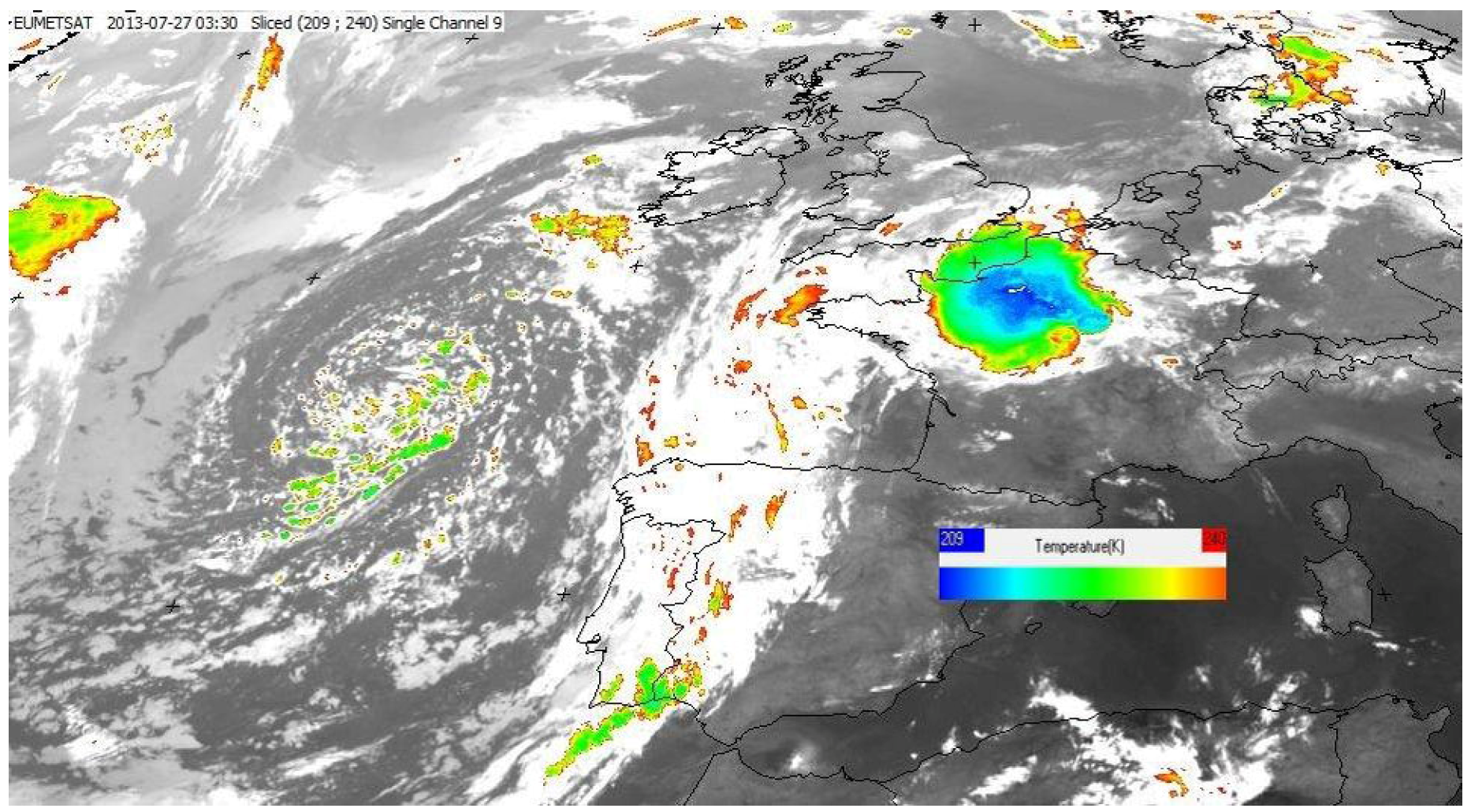
| 20130721–20130728 | Large convective precipitation amounts in northern continental Europe. |
| 20140622–20140625 | Severe precipitation case in the southwestern part of France. |
| Versions | Description |
|---|---|
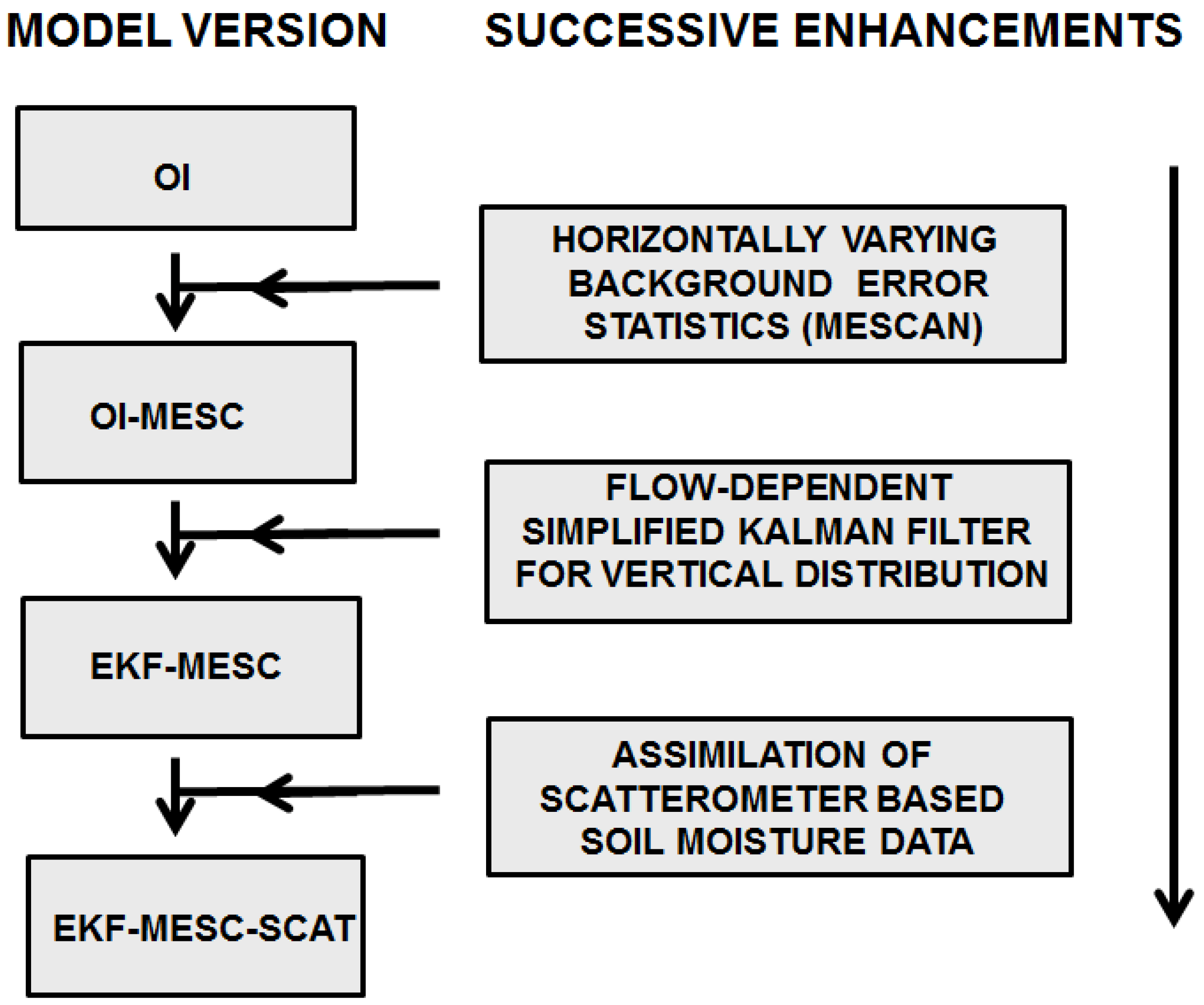
| OI | Default surface data assimilation. |
| OI-MESC | Identical to OI but with default background error statistics replaced by MESCAN. |
| EKF-MESC | Identical to OI-MESC but with a simplified Kalman filter being used in the vertical. |
| EKF-MESC-SCAT | Identical to EKF-MESC but using in addition scatterometer soil moisture product. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lindskog, M.; Landelius, T. Short-Range Numerical Weather Prediction of Extreme Precipitation Events Using Enhanced Surface Data Assimilation. Atmosphere 2019, 10, 587. https://doi.org/10.3390/atmos10100587
Lindskog M, Landelius T. Short-Range Numerical Weather Prediction of Extreme Precipitation Events Using Enhanced Surface Data Assimilation. Atmosphere. 2019; 10(10):587. https://doi.org/10.3390/atmos10100587
Chicago/Turabian StyleLindskog, Magnus, and Tomas Landelius. 2019. "Short-Range Numerical Weather Prediction of Extreme Precipitation Events Using Enhanced Surface Data Assimilation" Atmosphere 10, no. 10: 587. https://doi.org/10.3390/atmos10100587
APA StyleLindskog, M., & Landelius, T. (2019). Short-Range Numerical Weather Prediction of Extreme Precipitation Events Using Enhanced Surface Data Assimilation. Atmosphere, 10(10), 587. https://doi.org/10.3390/atmos10100587